图1 地铁永磁同步牵引系统结构框图
Fig.1 The structure diagram of metro permanent magnet synchronous motor traction system
摘要 永磁同步牵引传动系统是轨道交通车辆稳定运行的重要组成部分,由于车辆经过断电区时,供电系统会出现短暂失电而引起母线电压突变,对牵引系统造成电流冲击以及LC振荡,甚至触发系统发生重大故障,影响系统运行。为使车辆能够平稳穿越断电区,该文通过建立轨道车辆永磁同步牵引系统穿越断电区的等效电路,推导出系统进入断电区前后的数学模型,并在此基础上提出一种通过整流发电稳定母线电压穿越断电区的控制策略,避免关闭牵引系统和断开主接触器,同时降低驶离断电区时母线电压突变,从而减小牵引系统的冲击及振荡。仿真和试验结果验证了所提控制策略的有效性和可行性。
关键词:轨道交通车辆 永磁同步电机 牵引控制系统 断电区 整流发电
轨道交通车辆永磁同步牵引传动系统由接触轨受电模块、直流充电滤波模块、牵引变流器、永磁同步牵引电机等组成,集电靴从接触轨取电后经滤波器和牵引变流器驱动永磁同步电机(Permanent Magnet Synchronous Motor, PMSM),为车辆的运行提供动力[1]。鉴于目前供电系统的设计,车辆运行线路中,接触轨供电存在失电区域,即供电电压突然中断,一段时间后又恢复供电的区间,通常称之为断电区[2]。牵引系统在实际运行过程中,供电电压直接影响母线电压,而母线电压突变容易引起电流冲击以及低频振荡,甚至可能触发系统重故障,造成停机[3]。为确保牵引系统顺利穿越断电区,国内外学者展开很多研究,提出相关的解决措施,并且取得一定效果。
文献[4]以上海浦东国际机场旅客捷运系统为例,对受电车辆在穿越断电区时产生过电流的原因进行分析,并结合线路实际工况提出了车辆穿越断电区的解决方法,但是未能从理论上解决断电区电压突变对车辆牵引系统的冲击问题,所提方法不具有普适性。文献[5]以高速牵引列车为研究对象,建立了考虑滤波电感在内的牵引供电系统模型,分析了滤波电感对于降低电流冲击的作用,然而并没能提出解决断电区穿越引起巨大冲击和LC振荡的有效方法。文献[6]以电动车辆永磁同步牵引系统为例,对母线电压波动造成的影响进行分析,并从控制算法上提出了优化措施,虽然能够降低母线电压波动对系统的冲击,但是车辆进入断电区时仍然需要关闭牵引系统,待通过断电区后再重启系统,对操作人员的依赖程度较高。文献[7]对电力机车中直流母线电压与电力电子变压器进行建模,通过仿真分析了大信号扰动对直流母线电压的影响,提出了电压前馈补偿策略调节母线电压,并为母线电压控制器的设计提供了准则,不足之处在于只进行了仿真分析,没有通过试验进行具体验证。
为更好地解决轨道交通车辆永磁同步牵引系统断电区穿越问题,本文以北京地铁某线路为例,介绍永磁同步牵引系统结构,分析断电区问题的产生原因及影响,并在此基础上提出了基于整流发电稳定母线电压使牵引系统穿越断电区的控制策略,从而使车辆在不关闭牵引系统的情况下平稳通过断电区,避免了车辆通过断电区时因母线电压突变引起的系统冲击和振荡,最后利用仿真和试验对控制策略进行了验证。
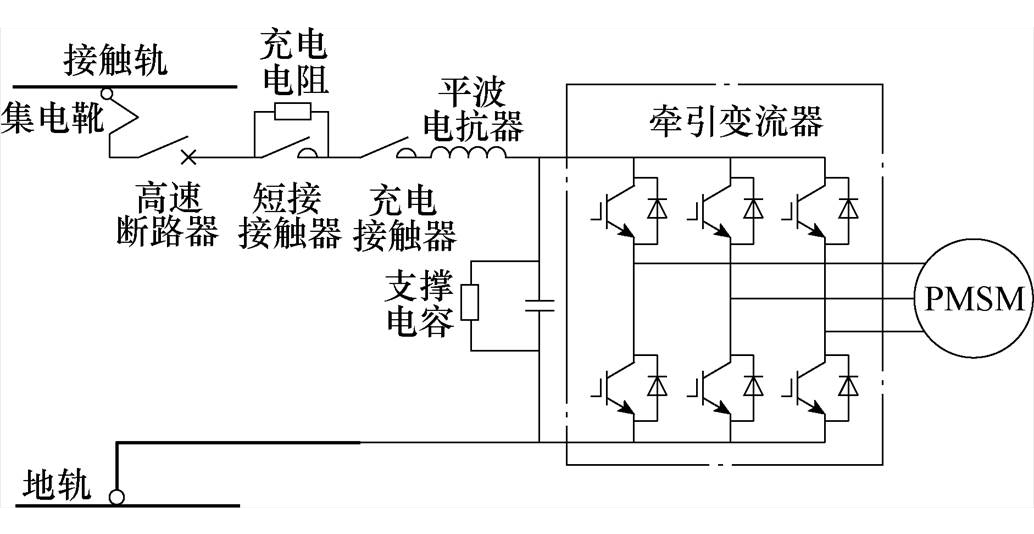
在常见的地铁牵引系统中,接触轨供电、集电靴采电的方式得到越来越多的应用,集电靴采电后经过充电滤波电路向牵引变流器提供1 500V或750V直流电,而后牵引控制系统根据当前的牵引指令生成目标转矩,并控制三相牵引变流器的开通与关断,从而驱动永磁同步电机运行。所选线路地铁车辆每套变频器有4组逆变模块,驱动4台电机,在结构和控制策略上各模块完全一致,为简化分析,以一组逆变模块驱动一台电机进行研究,地铁永磁同步牵引系统的结构框图如图1所示。
图1 地铁永磁同步牵引系统结构框图
Fig.1 The structure diagram of metro permanent magnet synchronous motor traction system
从图1可以发现,接触轨提供的供电电压经过充电滤波电路向支撑电容充电,而后通过牵引变流器向永磁同步电机提供电能。高速断路器在没有重大故障的前提下一直保持闭合,闭合充电接触器后向支撑电容充电,当充电至80%以上时,闭合短接接触器,充电电阻被旁路后允许系统运行,所以供电电压的变化会直接影响转矩指令的生成,进而影响系统运行。由于接触轨布置存在断电区域,车辆进入该区域,供电电压会突降为零,车辆离开该区域后,供电电压瞬时恢复。因此,地铁车辆在穿越断电区时,供电电压会急剧跳变,需要对车辆穿越断电区的工况进行分析,设计相应的控制策略,使其稳定穿越断电区。以所选地铁线路为例,永磁同步牵引系统参数见表1。
为更好地了解断电区特性,设计牵引系统断电区穿越策略,首先对断电区形成的原因进行分析。地铁车辆在实际线路运行中,供电电压由接触轨提供,而接触轨的铺设并不连续,通常设有分段,段与段之间存在间隔,集电靴在间隔区域不能受电,从而导致车辆进入该区域后供电中断[8]。接触轨分段形成断电区示意图如图2所示。
表1 地铁永磁同步牵引系统参数
Tab.1 The parameters of metro PMSM traction system
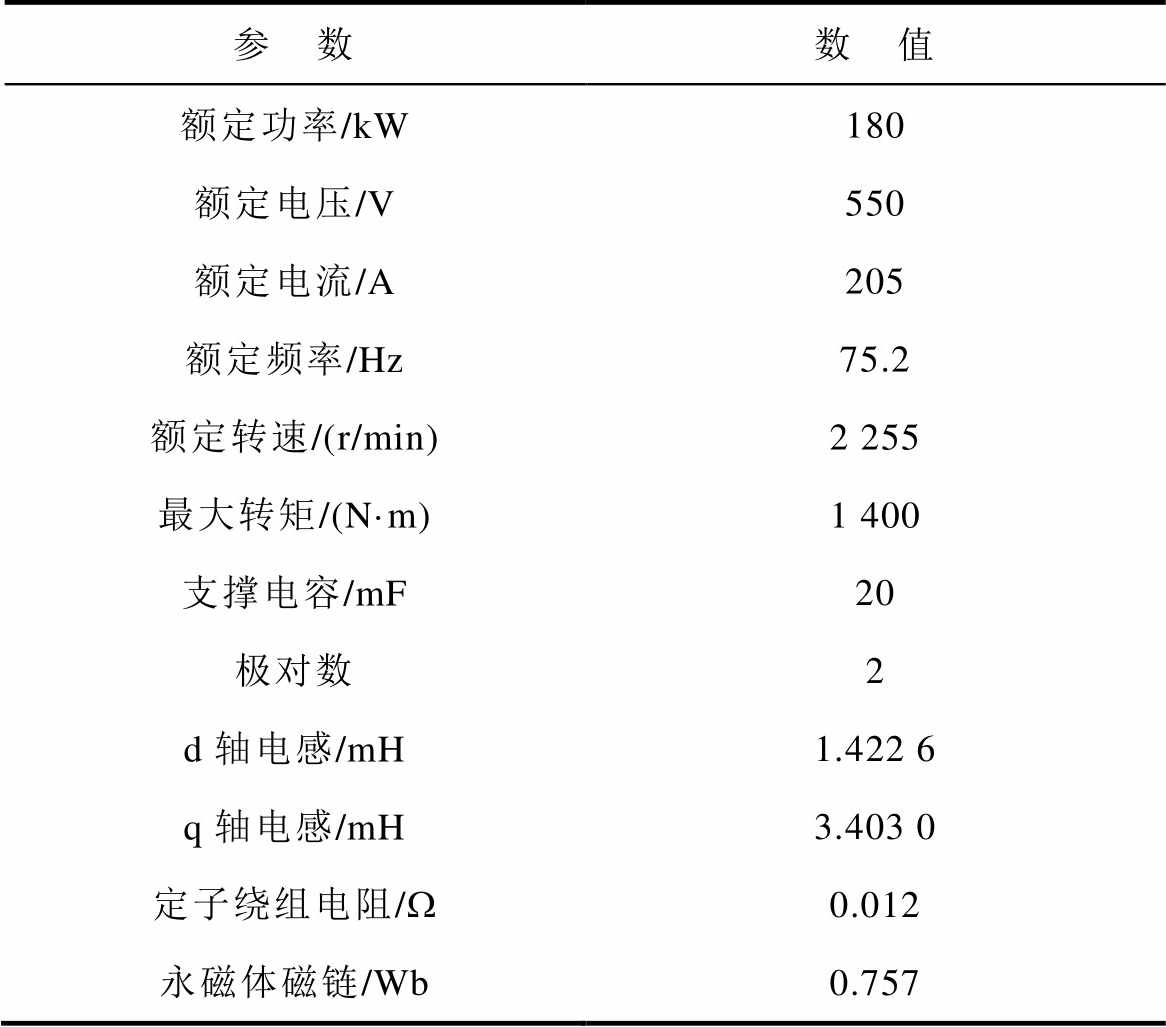
参 数数 值 额定功率/kW180 额定电压/V550 额定电流/A205 额定频率/Hz75.2 额定转速/(r/min)2 255 最大转矩/(N·m)1 400 支撑电容/mF20 极对数2 d轴电感/mH1.422 6 q轴电感/mH3.403 0 定子绕组电阻/W0.012 永磁体磁链/Wb0.757
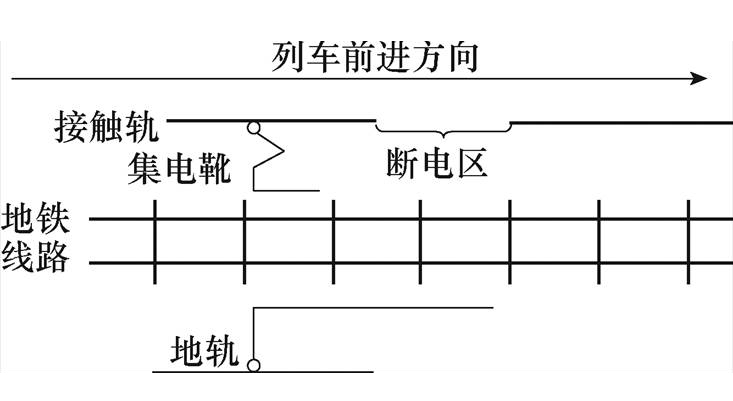
图2 断电区示意图
Fig.2 The schematic diagram of power-off area
实际线路中断电区的设置主要有两种类型:第一种类型是电分段,由于地铁线路跨越距离远,通常由多个变电所进行分区段供电,此外,为提高继电保护可靠性,缩小故障影响范围,车辆从运行线路回到车辆段时也存在供电区间切换问题,接触轨从一个变电所的供电区间跨越到另一个变电所的供电区间时,不同供电区间衔接处设有电分段;第二种类型是物理分段,在地铁线路接触轨铺设过程中,考虑到道岔区、人防工程等因素的影响,接触轨可能无法连续布置,也会存在不同长度的中断,形成物理分段[9]。因此,地铁永磁同步牵引系统在实际线路运行过程中,必然会经过断电区,造成直流侧突然失去供电,驶离断电区后又恢复供电。
为便于对地铁车辆穿越断电区的具体工况进行分析,建立永磁同步牵引系统断电区穿越等效模型如图3所示。
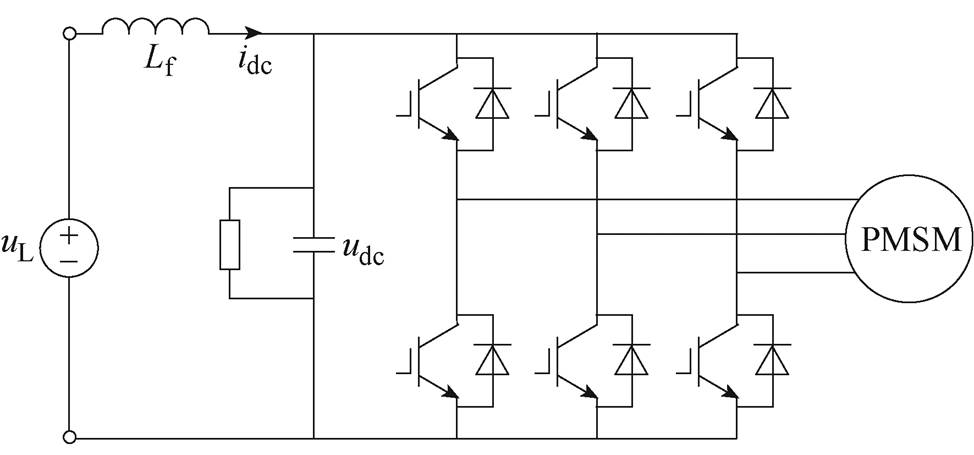
图3 牵引系统断电区穿越等效模型
Fig.3 The equivalent model of power-off area traversing
图3中,uL为母线电压,即由接触轨供电在牵引系统直流侧形成的电压,当集电靴受电时,母线电压由供电电压决定,集电靴不受电时,母线电压由电容电压决定;idc为直流母线电流;udc为支撑电容电压;Lf为布置在牵引变流器和直流供电网之间的滤波电感,母线电压经过滤波电感向支撑电容充电,该电感对于降低直流侧电压波动以及电流冲击对牵引变流器的影响具有重要作用,同时对于牵引系统具备断电区穿越能力也极为关键。
当地铁车辆进入断电区后,由于供电线路失电,母线电压uL会瞬时突降为0,而支撑电容电压udc在极短的时间内的变化相对较慢。根据所选线路器件选型情况,直流支撑电容容值为20mF,该支撑电容在无供电电压的情况下仅支持牵引系统满功率继续运行约10ms。车辆进入断电区后,如果继续按照原牵引指令运行,在10ms左右支撑电容就会完全失电,而实际线路中车辆通过断电区的时间约为0.5~1s,所以,在供电丢失的情况下,单纯依靠支撑电容储备的电能不足以支持车辆穿越断电区。待车辆驶离断电区,集电靴再次和接触轨连接恢复供电,母线电压从0V突增至750V,必然会对系统造成很大的电流冲击以及LC低频振荡[10-11]。牵引系统在支撑电容失电情况下恢复供电冲击等效电路如图4所示,该冲击电流可能损坏直流支撑电容,甚至触发高速断路器动作,进而引起系统重故障,造成系统停机。此外,地铁车辆在穿越断电区时,由于供电电压突变还可能引起燃弧、集电靴熔断器损坏、接触轨防护罩移位、牵引制动异常等一系列故障[12]。
按照表1中地铁永磁同步牵引系统参数,进行电容失电情况下供电电压恢复的仿真分析,牵引系统直流侧仿真波形如图5所示。可以看出,母线电压由0V突增至850V时,瞬间冲击电流达到400A,同时直流侧电压电流产生LC振荡,降低了平波电抗器和支撑电容的寿命。
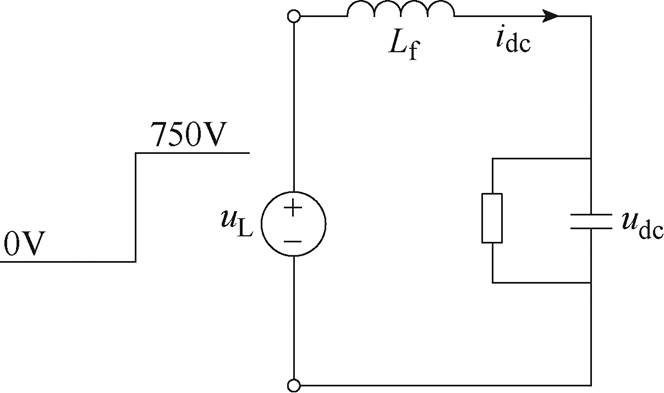
图4 电容失电情况下恢复供电冲击等效电路
Fig.4 The equivalent circuit of power restoration under capacitor lose power
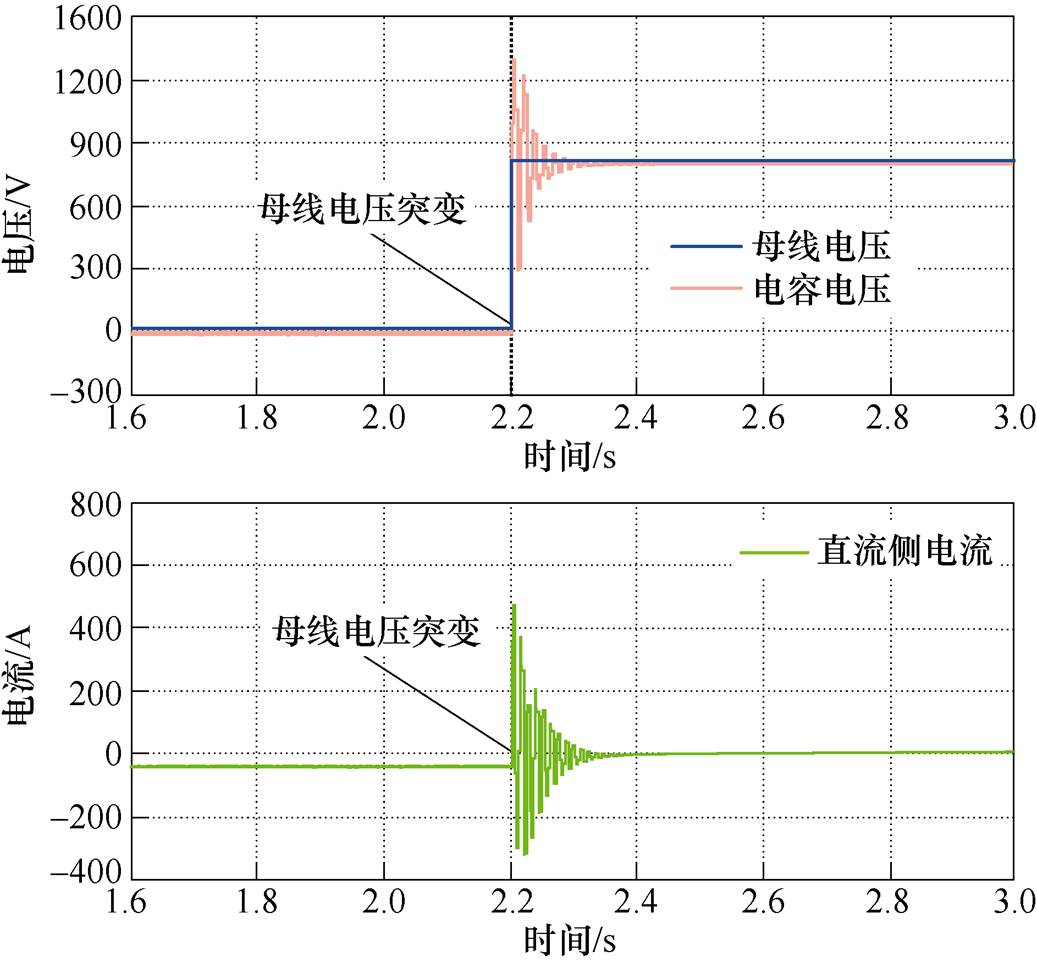
图5 母线电压由0V突增至850V直流侧仿真波形
Fig.5 The DC side simulation waveforms under bus voltage changes from 0V to 850V
当前地铁线路采取的断电区穿越控制策略主要可分为两大类:
第一大类,车辆以牵引系统关闭并且主接触器(包含图1中充电接触器和短接接触器)分闸状态通过断电区,其中,主接触器分闸又可分为主动分闸和故障分闸两小类:①主动分闸,即在车辆进入断电区之前主动将接触器分闸(如引言中提到的依靠司机操作);②故障分闸,即系统进入断电区,检测到母线电压过低,判定为欠电压故障后主接触器自动分闸。无论是主动分闸还是故障分闸,牵引系统的主接触器以分闸状态通过断电区后,需要按照正常启动流程执行充电接触器合闸、电容电压充电至母线电压的80%以上、短接接触器合闸这三步操作(电容电压充电的三步常规流程),然后牵引系统再恢复运行。
第二大类,即车辆通过断电区时主接触器一直保持合闸状态,由于过断电区之前不用分闸,过断电区之后也不用执行电容电压充电的三步流程。采用该类策略时,进入断电区后,需要将牵引系统的输出转矩迅速降到0,以避免支撑电容上的电能被迅速消耗掉。
对于第一大类断电区穿越控制策略,由于接触器需要分闸,机械开关动作会降低元器件使用寿命。对于异步电机牵引系统,这种操作方式尚可接受;而对于永磁同步牵引系统,直流侧主接触器断开、变频器停机后,永磁同步牵引系统可能工作在不控整流状态,使支撑电容电压迅速抬高,对系统正常工作产生不利影响。
对于第二大类断电区穿越控制策略,需要通过控制电机的电流使其输出的转矩为零,由于母线已经和支撑电容断开且支撑电容的电压处于不控状态(或者叫开环状态),所以仅仅控制电机输出转矩为零(需要考虑对转矩的控制精度),转矩控制精度可能引起电容电压波动,无法保证电容电压一直保持在750V附近。驶离断电区供电电压恢复时,最恶劣的情况下支撑电容上的电能耗尽,母线电压从0V突增至750V附近,会对系统产生剧烈冲击。
为了减小地铁车辆穿越断电区时母线电压突变引起的系统冲击,降低对司机的依赖程度,避免关闭牵引系统断开接触器,本文提出一种利用整流发电稳定母线电压穿越断电区的控制策略。牵引系统检测到车辆进入断电区,系统不再执行司控室发来的转矩指令(实际运行中由于供电电压跌落,系统也无法继续执行原指令),利用车辆的超大惯性使永磁同步牵引系统进入整流发电状态,将直流母线电压稳定在供电电压附近,从而在供电电压恢复时可以大大降低电压突变引起的冲击。车辆驶离断电区后,牵引系统退出整流发电状态,恢复至正常牵引状态,重新执行司控室发来的转矩指令。
根据第2.2节的分析,车辆经过断电区时,母线电压uL会瞬间跌落,而电容电压udc变化相对较慢,因此,可以根据母线电压的变化情况判断地铁车辆是否进入了断电区[13]。牵引系统正常运行时母线电压额定值为750V,由于供电线路电压存在波动,允许母线电压变化范围为500~900V,因此,设置母线电压低于450V作为进入断电区的判断条件。
车辆进入断电区后,系统由正常牵引控制模式切换至断电区穿越控制模式,此时电机处于整流发电状态,电容电压及母线电压稳定在目标值。为尽量减小供电电压恢复时母线电压突变对牵引系统的冲击,设定稳压控制器的控制目标为母线电压额定值750V。由于支撑电容上基本没有消耗能量的路径,需要的功率非常小,当转矩指令为正值时,永磁电机消耗能量,电容电压下降;转矩指令为负值时,永磁电机惰行发电,能够向电容回馈能量,电容电压上升[14-15]。因此,将电容电压作为闭环控制量,通过PI控制器生成对应的转矩指令,便可实现对电容电压的实时调节。地铁永磁同步牵引系统断电区穿越稳压控制器如图6所示。

图6 断电区穿越稳压控制器
Fig.6 The voltage stabilizing controller of power-off area traversing
在图6所示的断电区穿越稳压控制器框图中,系统给定值 是支撑电容电压的目标值,同时也是预期的母线电压目标值,系统反馈值udc是实际采样得到的支撑电容电压值,PI调节器生成对应的转矩指令
是支撑电容电压的目标值,同时也是预期的母线电压目标值,系统反馈值udc是实际采样得到的支撑电容电压值,PI调节器生成对应的转矩指令 ,通过转矩指令控制电机牵引或制动,从支撑电容耗电或者向支撑电容充电,从而调节电容电压达到稳定值。
,通过转矩指令控制电机牵引或制动,从支撑电容耗电或者向支撑电容充电,从而调节电容电压达到稳定值。
当地铁车辆驶离断电区,而牵引系统并未下达由断电区穿越模式切换至正常运行模式指令时,由于集电靴重新从接触轨受电,母线电压uL以及电容电压udc实际由接触轨供电电压决定[16-17]。此时PI调节器达到饱和,稳压控制器无法继续调节电容电压,转矩指令为调节器允许输出的极值。如果母线电压低于电容电压给定,电压调节负向饱和,转矩给定为PI调节器允许输出的最小值(负转矩);如果母线电压高于电容电压给定,电压调节正向饱和,转矩给定为PI调节器允许输出的最大值(正转矩)。因此,在断电区穿越控制模式供电电压恢复调节器达到饱和后,并不会影响系统运行,牵引系统按照设定的最大最小转矩值恒指令运行,待系统给出退出断电区指令后再恢复正常运行。
从图6可以发现,断电区穿越模式的控制目标为电容电压,与正常牵引模式的区别在于不再执行司控室的转矩指令,而是通过稳压控制器对电容电压的调节得到转矩指令。因此,牵引系统处于断电区穿越模式时,电流内环的控制方式与正常牵引模式是相同的,只需要在正常牵引模式的基础上增加电压外环调节,便可以实现对断电区穿越的控制。
在dq旋转坐标系下,永磁同步牵引系统电压与电流的关系[18-19]为
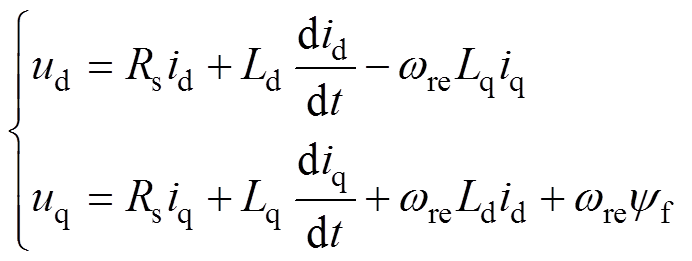 (1)
(1)式中,ud、uq分别为d、q轴电压;id、iq分别为d、q轴电流;Ld、Lq分别为d、q轴电感;Rs为定子电阻;wre为电角速度;yf为转子磁。
根据式(1)中电压与电流关系式,可以得到永磁同步牵引系统电流内环控制框图如图7所示。
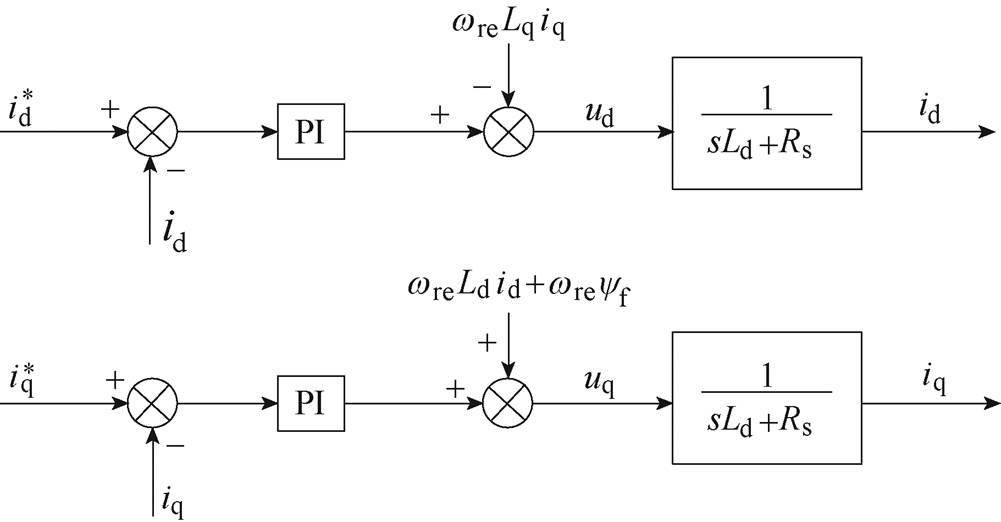
图7 永磁同步牵引系统电流内环控制框图
Fig.7 The current loop diagram of PMSM traction system
据此,可以得到电流内环的传递函数,d、q轴开环传递函数Gid和Giq分别为
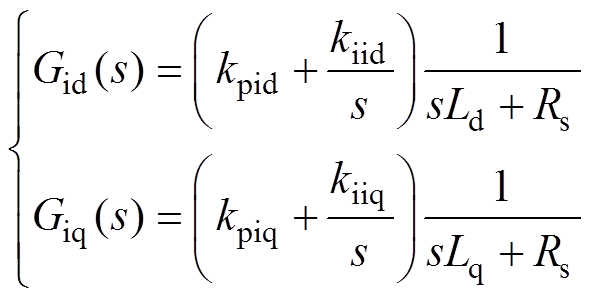 (2)
(2)式中,kpid和kiid为d轴的PI参数;kpiq和kiiq为q轴的PI参数。由于系统在正常牵引模式和断电区穿越模式电流内环的控制方式一致,所以,以采用最大转矩电流比(Maximum Torque Per Ampere, MTPA)控制策略和空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)技术的永磁同步电机地铁牵引系统为例,系统稳压穿越断电区的整体控制框图如图8所示。在断电区穿越控制模式时,转矩指令由稳压控制器生成,而在正常牵引控制模式时,转矩指令由司控室下达。
根据上面的分析,地铁车辆驶离断电区后,供电电压恢复,稳压控制器中电压外环调节器会达到饱和状态,所以可以使电压外环调节器进入饱和状态并保持一段时间,作为系统由断电区模式重新进入牵引模式的判定条件。考虑到在极特殊情况下,如果母线电压出现扰动,电压外环调节器也可能出现瞬间饱和的状态[20]。因此,系统退出断电区模式进入正常牵引模式还设置了第二个保底条件,即保持断电区模式运行设定的固定时间后退出。两个条件配合使用既保证了控制模式识别的效率,又保证了控制模式切换的可靠性。此外,考虑到接触轨自身出现供电丢失引起系统进入断电区模式的情况,当牵引系统给出退出断电区穿越模式回到正常牵引模式指令后,如果供电电压依然没有恢复,即系统再次检测到母线电压过低,则判定为供电丢失,牵引系统报欠电压故障并停止运行。
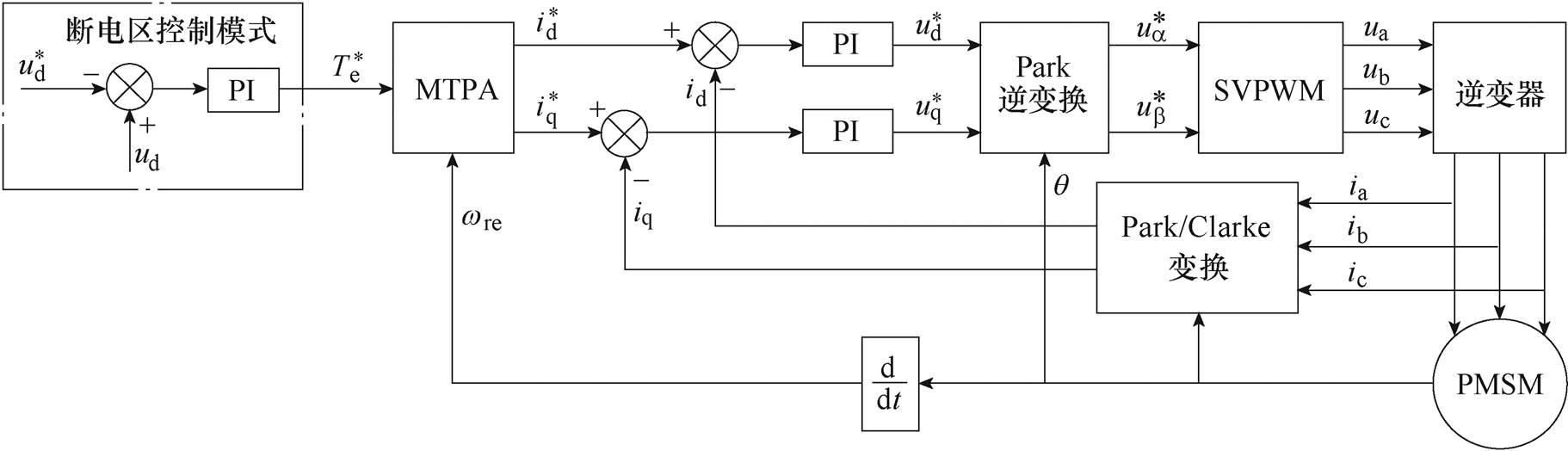
图8 地铁永磁同步牵引系统断电区穿越整体框图
Fig.8 The power-off traversing overall block diagram of PMSM traction system
为了对本文提出的基于稳压穿越断电区控制策略进行仿真验证,基于PLECS平台搭建了地铁永磁同步牵引系统仿真模型。考虑到供电电压波动范围为500~900V,为将母线电压波动与电容电压间形成突变的影响考虑在内,设置母线电压为850V。在实际线路运行中,车辆通过断电区时间在1s左右,由于试验现场条件限制,直流供电需要人为操作开关,难以在1s内实现供电开关断开并重新合闸的过程,为便于实现在断电区穿越模式内完成供电电压的恢复,现场试验设定断电区模式保持时间为5s。为保证仿真与试验环境一致,仿真分析时设置断电区模式保持时间也为5s,母线电压恢复时间为2.5s。
地铁永磁同步牵引系统断电区穿越仿真参数见表2。
表2 断电区穿越仿真参数
Tab.2 Simulation parameters of power-off traversing
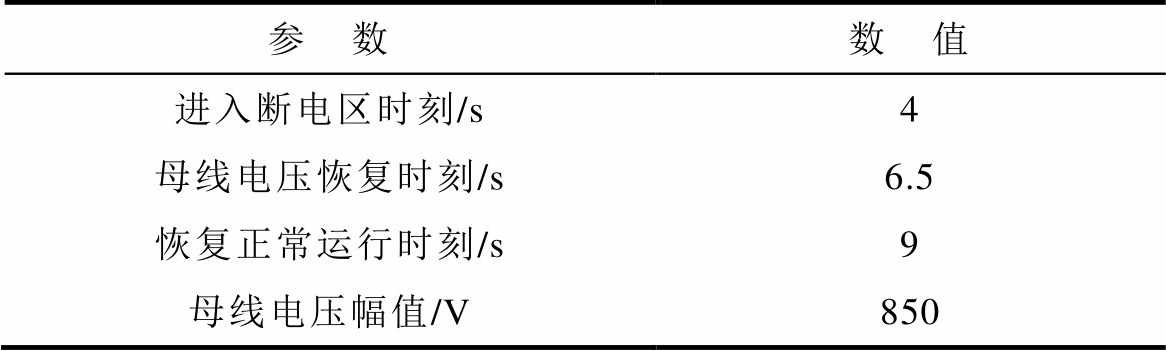
参 数数 值 进入断电区时刻/s4 母线电压恢复时刻/s6.5 恢复正常运行时刻/s9 母线电压幅值/V850
依据表2中仿真参数,分别以不采取任何策略直接通过断电区和采用本文提出的稳压策略通过断电区两种方式,进行相同工况下地铁永磁同步牵引系统断电区穿越仿真分析,其中,直接通过断电区策略选取可能出现的最恶劣工况,即在支撑电容上的电能完全耗尽时恢复供电,两种策略下断电区穿越过程中电压、转矩及电流仿真波形分别如图9和图10所示。
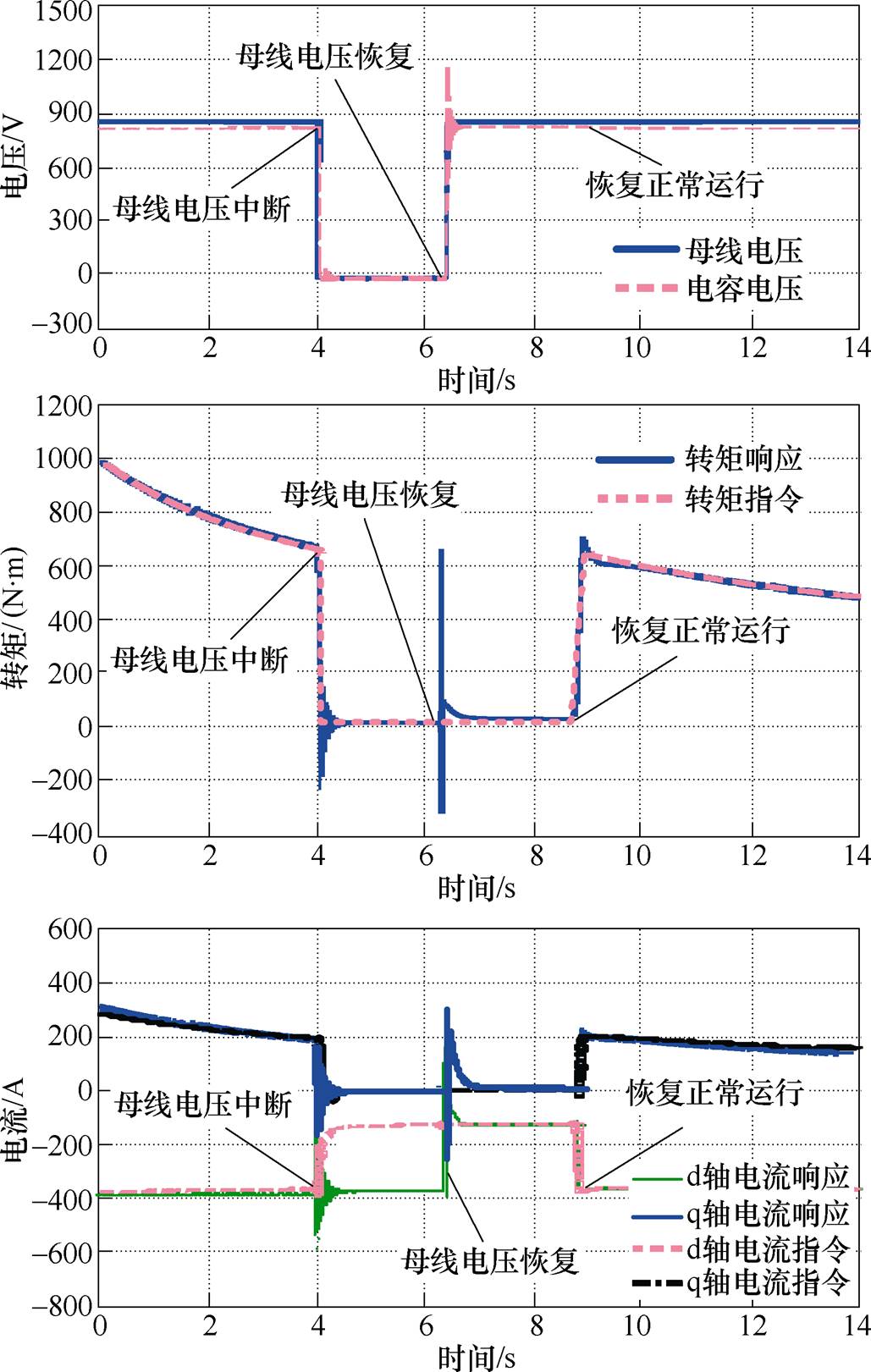
图9 直接通过断电区仿真波形
Fig.9 The power-off traversing simulation waveforms based on directly through
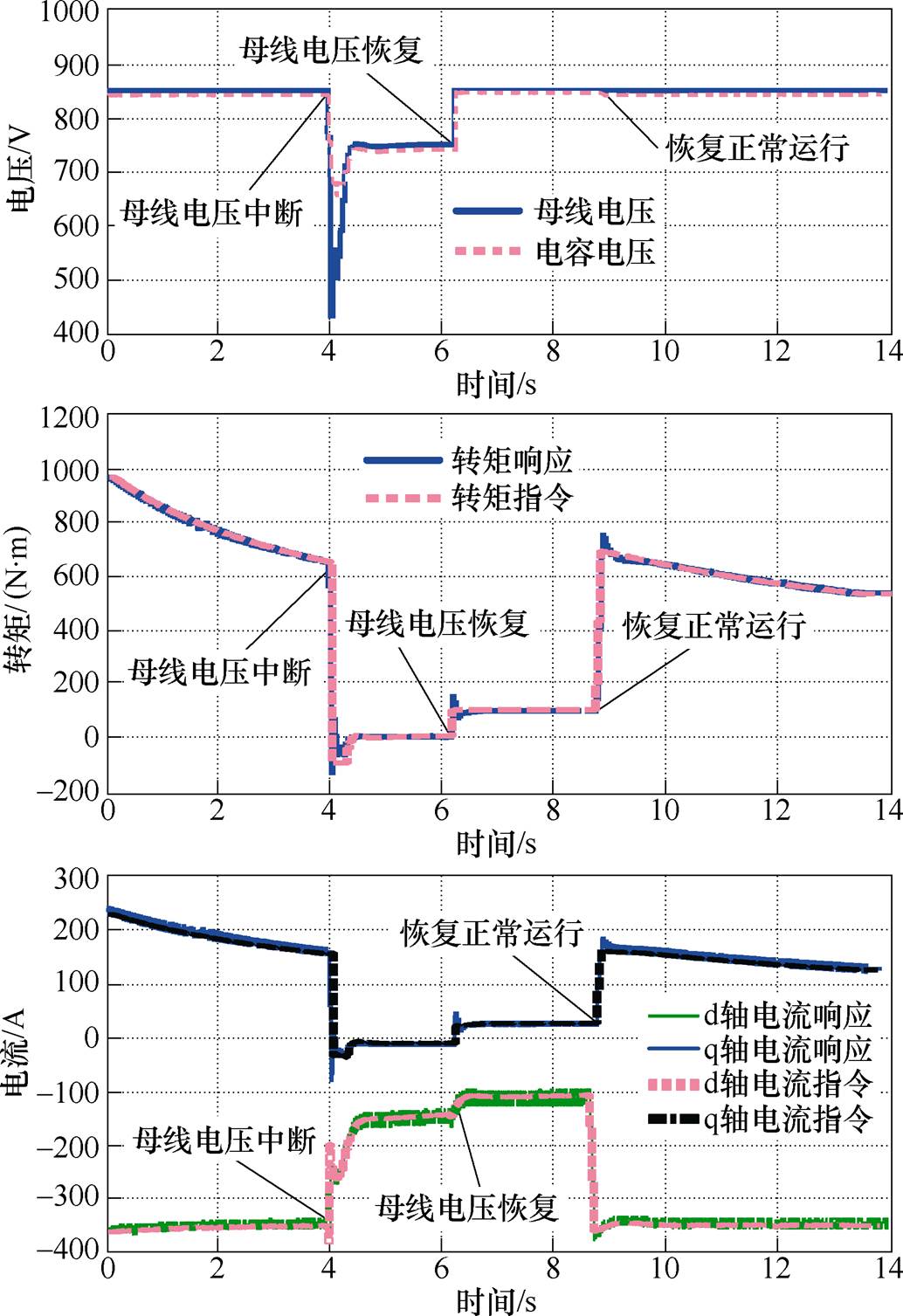
图10 稳压策略通过断电区仿真波形
Fig.10 The power-off traversing simulation waveforms based on stabled voltage
从图9仿真结果可以发现,不采取任何策略直接通过断电区时,当供电电压丢失,牵引系统以零转矩运行状态通过断电区,待供电电压恢复时,由于母线电压突变,转矩和电流响应均出现剧烈冲击,直流侧电压也出现振荡,不利于系统稳定,同时会降低器部件使用寿命。
从图10仿真波形可以看出,地铁车辆在4s时刻进入断电区,系统检测到母线电压低于450V时,牵引系统切换至断电区穿越控制模式,稳压控制器开始工作,由于此时电容电压较低,系统产生负转矩,向电容充电,电容电压0.5s内稳定至750V,此时系统功率很小,因而电机转矩基本为零。6.5s时刻车辆驶离断电区,供电电压恢复,母线电压和电容电压均恢复到供电电压850V,稳压控制器达到饱和,由于此时还处于断电区穿越控制模式,电机按照调节器允许最大转矩100N·m运行。9s时刻牵引系统给出退出断电区穿越模式恢复正常牵引模式指令后,牵引系统按照司控室下达转矩指令继续运行,转矩和电流均恢复正常。
仿真结果表明,在牵引系统穿断电区的过程中,采用本文提出的稳压控制策略,电流没有出现明显冲击,电压和转矩也没有出现振荡,仿真结果验证了本文所提出的断电区穿越控制策略能够使地铁车辆在不关闭牵引系统不断开主接触器的情况下稳定通过断电区。
为检验所提控制策略在地铁车辆实际运行过程中断电区穿越的控制效果,搭建了如图11所示永磁同步牵引系统试验平台,通过模拟供电电压断电构造断电区工况。参照仿真条件设置,断电区穿越试验参数设置见表3。
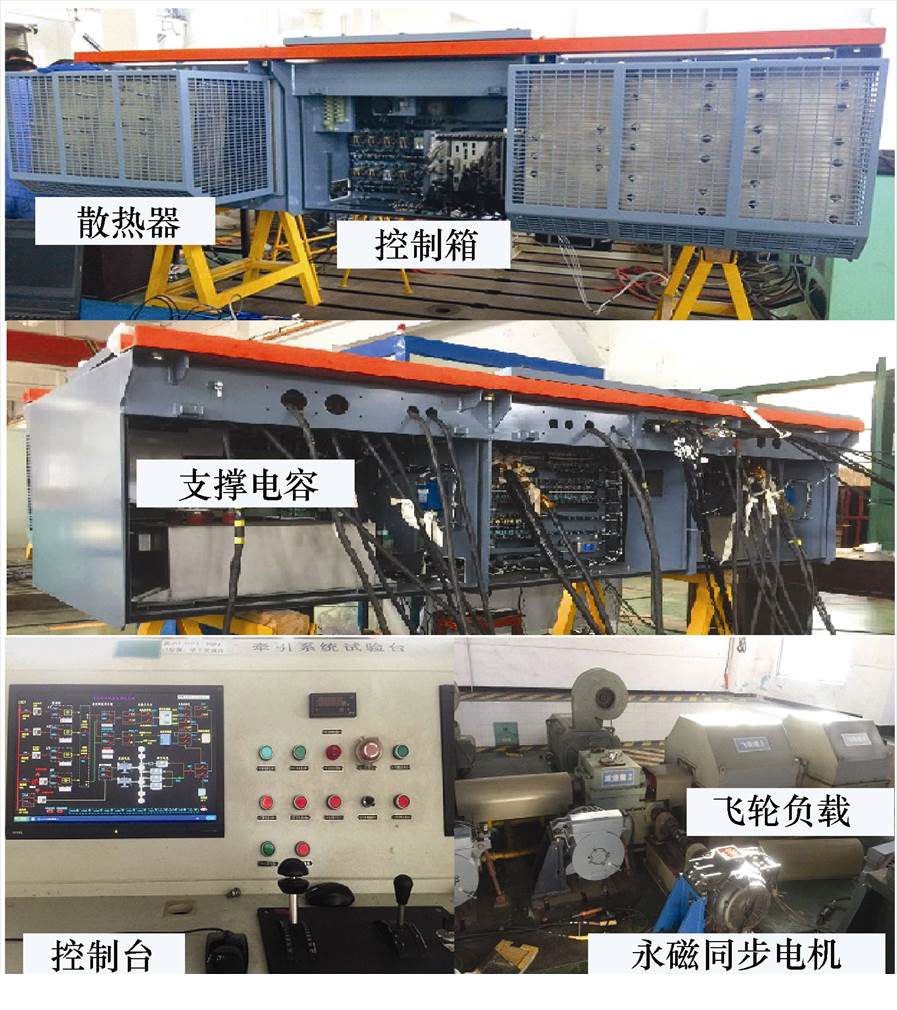
图11 地铁永磁同步牵引系统试验平台
Fig.11 The platform of PMSM traction system
表3 断电区穿越试验参数
Tab.3 Experimental parameters of power-off traversing
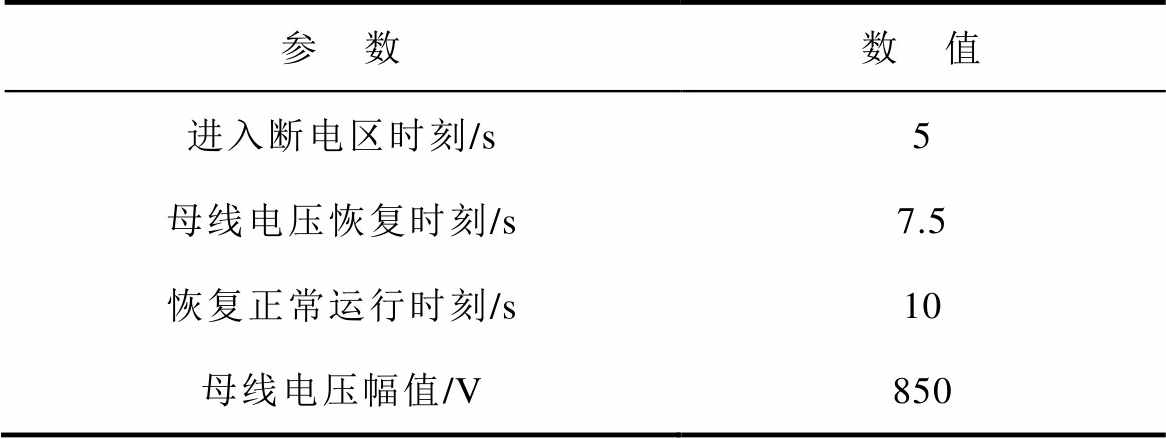
参 数数 值 进入断电区时刻/s5 母线电压恢复时刻/s7.5 恢复正常运行时刻/s10 母线电压幅值/V850
按照表3中参数进行地铁永磁同步牵引系统断电区穿越试验验证,基于本文所提稳压穿越控制策略,牵引系统从进入断电区到恢复正常运行的试验波形如图12所示。可以看出,5s时刻供电电压丢失,母线电压瞬间跌落,低于450V时系统判断车辆进入断电区,切换至断电区穿越控制模式,稳压控制器通过对输出转矩的调节使电容电压迅速稳定至750V。7.5s时刻恢复供电,母线电压恢复至850V,系统依然处于断电区穿越控制模式,此时调节器饱和,系统按照设定转矩最大值100N·m运行,由于功率较小,母线电压依然维持在850V。10s时刻由断电区穿越模式恢复正常牵引模式,牵引系统按照司控室下达的转矩指令正常运行,断电区顺利通过。试验波形中,10~10.7s母线电压下降是由于试验现场大功率运行时供电电压被拉低,与本文控制策略的选用没有关系。分析结果表明,地铁车辆永磁同步牵引系统穿越断电区的过程中,响应迅速,电压转矩及电流波形都没有出现明显的冲击和振荡,试验结果与仿真结果一致,验证了本文提出的基于稳压穿越断电区控制策略的可行性。
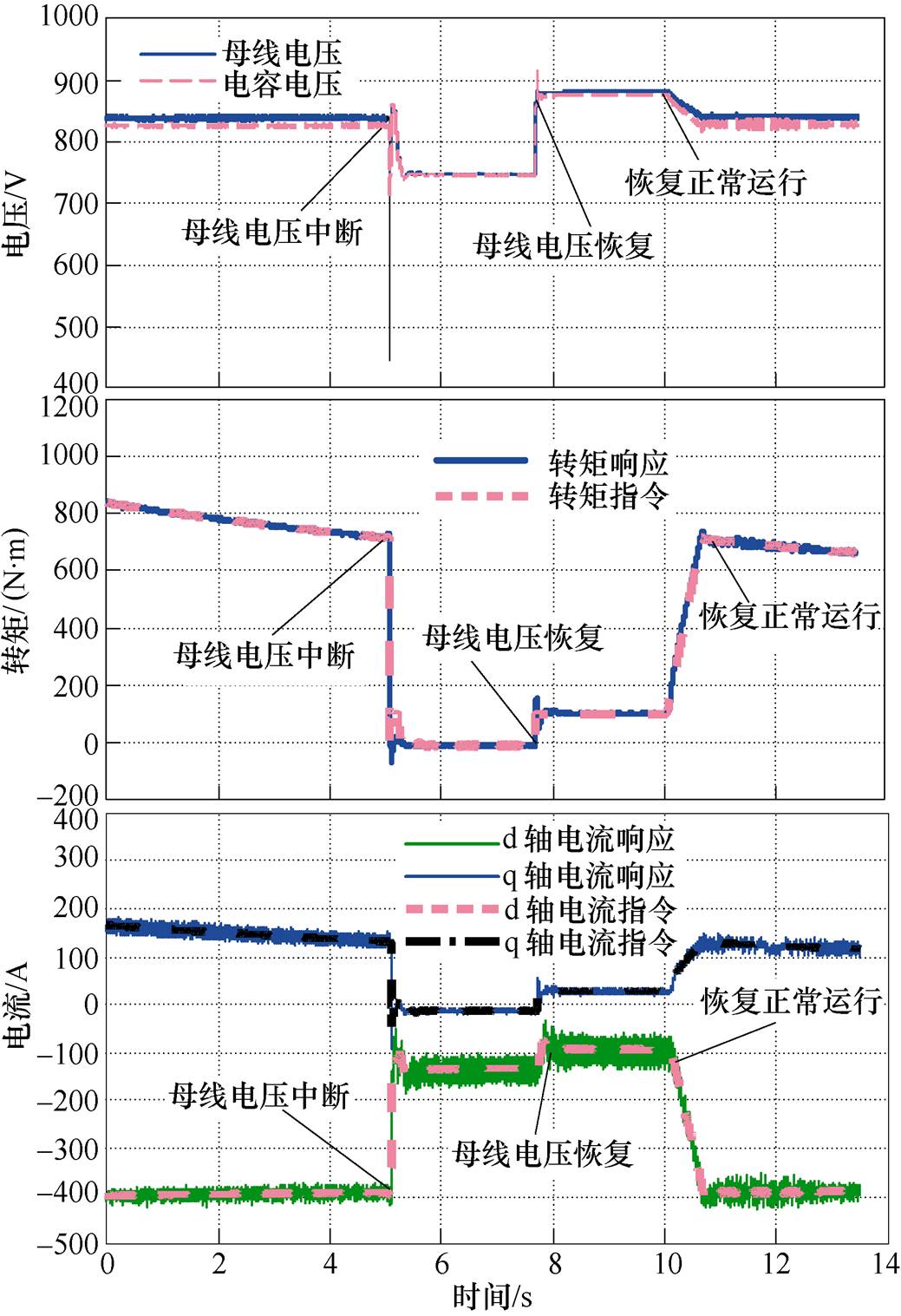
图12 永磁同步牵引系统断电区穿越试验波形
Fig.12 The power-off traversing experimental waveforms of PMSM traction system
本文所提出的断电区穿越控制策略,依据母线电压幅值的跌落判断车辆是否进入断电区,当母线电压幅值满足uL<450V时,则判断地铁车辆进入断电区。根据仿真和试验分析,从母线电压跌落到系统进入断电区控制模式的时间只需要几个ms。系统一旦进入断电区穿越控制模式,电压调节器开始工作,此时供电电压不再影响系统运行,系统可以一直以断电区模式稳定运行,直到牵引系统检测到供电电压恢复并发出退出指令后,系统退出断电区穿越模式恢复到正常牵引模式。根据实际线路条件,列车穿越断电区的时间通常在0.5~1s左右,而系统进入断电区穿越模式只需要ms级时间,所以,系统有充裕的响应时间进入断电区控制模式,本文设计断电区穿越时间为5s,只为便于试验现场对供电电源的人为操作。因此,断电区长度不同,或车辆通过断电区速度不同,只会影响牵引系统在断电区穿越模式的运行时间,并不会影响采用本文策略穿越断电区的控制效果。
为进一步验证实际线路供电出现问题时,牵引系统能够准确识别并报出欠电压故障的控制效果,在系统正常运行过程中,模拟供电电压中断,并且不再恢复供电,试验波形如图13所示。
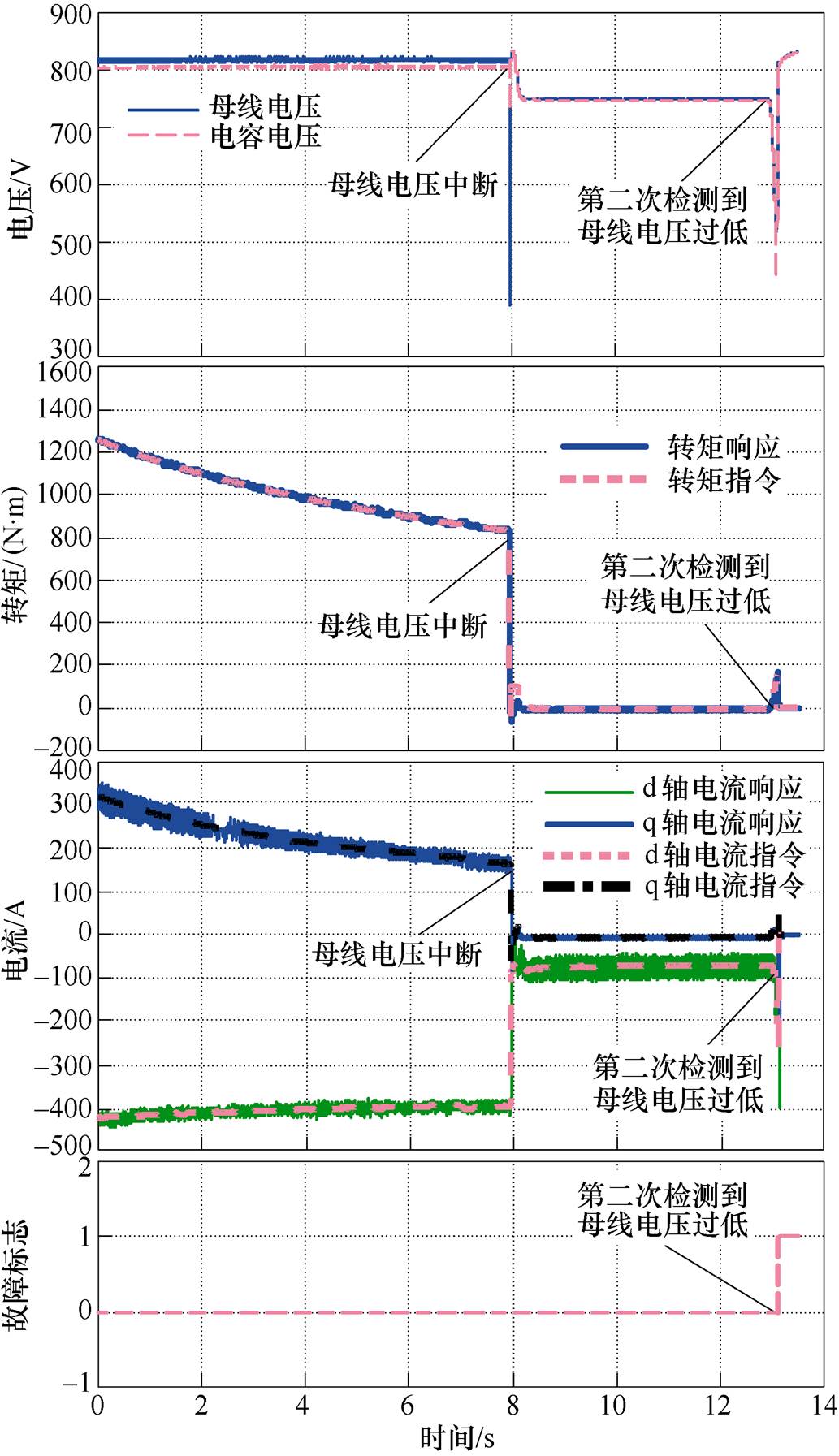
图13 欠电压故障试验波形
Fig.13 The experimental waveforms of under-voltage fault
从图13试验波形可以看出,牵引系统在8s时刻第一次检测到母线电压低于450V时,切换至断电区穿越控制模式,通过稳压控制器调节母线电压稳定在额定值750V,13s时刻退出断电区控制模式切换至正常牵引模式后,再次检测到母线电压低于450V,判定供电电压并未恢复,并报出线路欠电压故障。在整个过程中,系统响应稳定,没有出现明显的电流冲击和转矩波动,试验结果验证了本文所提出的控制策略能够在发生供电故障时使系统平稳停机,准确报出欠电压故障。
本文针对轨道交通车辆永磁同步牵引系统断电区穿越问题,分析了断电区的产生原因及具体工况,给出了车辆进入与退出断电区的判断条件,并设计了基于稳压穿越的断电区控制策略,通过调节牵引系统工作在整流发电或正常牵引模式,维持支撑电容电压和母线电压稳定在额定值,从而避免经过断电区时关闭牵引系统断开主接触器,并且在牵引系统重新接入供电时降低母线电压突变引起的冲击和振荡。以北京地铁某线路为例进行了仿真分析和试验验证,结果表明,本文所设计的基于稳压穿越断电区的控制策略能够支持地铁车辆在不关闭牵引系统保持接触器合闸的条件下平稳穿越断电区,提高了牵引系统的控制性能,降低了故障发生率。同时,在检测到供电电压丢失时,也能准确报出欠电压故障,增加了地铁永磁同步牵引系统的特色优势。
参考文献
[1] 张梓绥. 轨道交通中永磁同步电机控制关键技术研究[D]. 北京: 北京交通大学, 2019.
[2] 张宏宇. 天津地铁2号线接触轨断电区分析与应对措施[J]. 科技创新导报, 2019, 4(11): 32-34.
Zhang Hongyu. Analysis and countermeasures of contact rail power-off area of Tianjin metro line 2[J]. Science and Technology Innovation Herald, 2019, 4(11): 32-34.
[3] 李微, 周雪松, 马幼捷, 等. 三端口直流微网母线电压控制器及多目标控制[J]. 电工技术学报, 2019, 34(1): 92-102.
Li Wei, Zhou Xuesong, Ma Youjie, et al. Bus voltage controller and multi objective control of three port DC microgrid[J]. Transactions of China Electro- technical Society, 2019, 34(1): 92-102.
[4] 延娓娓, 刘帅. 单边供电系统断电区的地铁车辆通过策略[J]. 城市轨道交通研究, 2018, 21(2): 38-41.
Yan Weiwei, Liu Shuai. Metro vehicle passing strategy in the outage area of unilateral power supply system[J]. Urban Mass Transit, 2018, 21(2): 38-41.
[5] 张辉, 闫海明, 支娜, 等. 基于母线电压微分前馈的直流微电网并网变换器控制策略[J]. 电力系统自动化, 2019, 43(15): 166-175.
Zhang Hui, Yan Haiming, Zhi Na, et al. Control strategy of grid-connected converter in DC microgrid based on bus voltage differential feedforward[J]. Automation of Electric Power Systems, 2019, 43(15): 166-175.
[6] Choudhury A, Pillay P, Williamson S S. Modified DC-bus voltage-balancing algorithm based three- level neutral-point-clamped IPMSM drive for electric vehicle applications[J]. IEEE Transactions on Indu- strial Electronics, 2016, 63(2): 761-772.
[7] 滕昌鹏, 王玉斌, 周博恺, 等. 含恒功率负载的直流微网大信号稳定性分析[J]. 电工技术学报, 2019, 34(5): 973-982.
Teng Changpeng, Wang Yubin, Zhou Bokai, et al. Stability analysis of large signal in DC microgrid with constant power load[J]. Transactions of China Electrotechnical Society, 2019, 34(5): 973-982.
[8] Huang Xinxing, Yao Yihua, Lu Qinfen, et al. Control simulation of PMSM traction system of high speed train when passing neutral section[J]. Compel Inter- national Journal of Computations & Mathematics in Electrical, 2016, 35(2): 782-795.
[9] 赖声钢. 接触轨系统在道岔区可能存在列车失电问题的原因分析及解决方案[J]. 城市轨道交通研究, 2015, 18(5): 115-123.
Lai Shenggang. Cause analysis and solution of the problem of train power loss in the contact rail system in the turnout area[J]. Urban Mass Transit, 2015, 18(5): 115-123.
[10] Diao Lijun, Dong Kan, Yin Shaobo, et al. Ripple analysis and control of electric multiple unit traction drives under a fluctuating DC link voltage[J]. Journal of Power Electronics, 2016, 16(5): 1851-1860.
[11] 张颖, 王惠民, 葛兴来. 基于前馈电压补偿的地铁牵引变流器直流侧震荡抑制方法[J]. 中国电机工程学报, 2018, 38(9): 2728-2735.
Zhang Ying, Wang Huimin, Ge Xinglai. DC link stabilization method for metro traction converter motor system based on feedforward voltage com- pensation[J]. Proceedings of the CSEE, 2018, 38(9): 2728-2735.
[12] 魏文婧, 胡海涛, 王科, 等. 基于铁路功率调节器的高速铁路牵引供电系统储能方案及控制策略[J].电工技术学报, 2019, 34(6): 1290-1299.
Wei Wenjing, Hu Haitao, Wang Ke, et al. Energy storage scheme and control strategy of high-speed railway traction power supply system based on railway power regulator[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1290-1299.
[13] Calleja C, Lopez-De-Heredia A, Gaztanaga H, et al. Validation of a modified direct self control strategy for PMSM in railway traction applications[J]. IEEE Transactions on Industrial Electronics, 2016, 12(1): 1021-1032.
[14] 甘志伟, 缪冬敏, 王云冲, 等. 宽转速范围永磁同步发电机系统稳压控制及参数优化[J]. 电工技术学报, 2020, 35(8): 1624-1633.
Gan Zhiwei, Miu Dongmin, Wang Yunchong, et al. Voltage control and parameter optimization of wide speed range permanent magnet synchronous gener- ator system[J]. Transactions of China Electro- technical Society, 2020, 35(8): 1624-1633.
[15] 林文立, 刘志刚, 孙大南, 等. 地铁牵引系统的稳定性提升控制[J]. 电机与控制学报, 2012, 16(2): 56-61.
Lin Wenli, Liu Zhigang, Sun Danan, et al. Stability improvement control of metro traction system[J]. Electric Machines and Control, 2012, 16(2): 56-61.
[16] 李夏青, 左丽. 直流牵引网故障电流能量谱及特征矢量[J]. 电工技术学报, 2010, 25(11): 164-168.
Li Xiaqing, Zuo Li. Energy spectrum and characte- ristic vector of fault current in DC traction net- work[J]. Transactions of China Electrotechnical Society, 2010, 25(11): 164-168.
[17] 邓睿, 刘碧, 宋文胜. 牵引供电网-多台机车耦合系统的低频振荡分析与抑制[J]. 电工技术学报, 2019, 34(增刊1): 327-335.
Deng Rui, Liu Bi, Song Wensheng. Analysis and suppression of low-frequency oscillation of traction power supply network-multi-locomotive coupling system[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 327-335.
[18] 刘珅, 高琳. 永磁同步电机的改进模型预测直接转矩控制[J]. 电机与控制学报, 2020, 24(1): 10-17.
Liu Kun, Gao Lin. Improved model predictive direct torque control of permanent magnet synchronous motor[J]. Electric Machines and Control, 2020, 24(1): 10-17.
[19] 姚绪梁, 王旭, 冯泽文. 改善三相电压型PWM整流器动态性能的研究[J]. 电工技术学报, 2016, 31(增刊1): 169-175.
Yao Xuliang, Wang Xu, Feng Zewen. Research on improving the dynamic performance of three-phase voltage PWM rectifier[J]. Transactions of China Electrotechnical Society, 2016, 31(S1): 169-175.
[20] 高雅, 刘卫国, 骆光照. 牵引机车用永磁同步电机断电-重投控制系统研究[J]. 电工技术学报, 2016, 31(6): 100-107.
Gao Ya, Liu Weiguo, Luo Guangzhao. Research on power-off and re-throw control system of permanent magnet synchronous motor for traction locomo- tive[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 100-107.
Power-Off Area Traversing Control Strategy of Permanent Magnet Synchronous Motor Traction System in Rail Transit Vehicle
Abstract Permanent magnet synchronous motor (PMSM) traction drive system is an important part of the stable operation of rail transit vehicle. When the vehicle passes through the power-off area, the power supply system will temporarily lose power and cause the bus voltage mutation. Such mutation will bring current shock and LC oscillation to the traction system, and even trigger serious faults of the system, affecting system operation. In order to enable the vehicle to pass through the power-off area smoothly, this paper establishes the equivalent circuit of the PMSM traction system traversing the power-off area, and deduces the mathematical model before and after the rail transit vehicle traction system enters the power-off area. On this basis, a control strategy for stabilizing the bus voltage passing through the power-off area by rectifying power generation is proposed. As a result, the closing of the traction system and the disconnection of the main contactors can be avoided, and the sudden change of bus voltage when passing through the power-off area is reduced, thereby reducing the impact and oscillation of the traction system. Simulation and experimental results verify the feasibility and effectiveness of the proposed control strategy.
keywords:Rail transit vehicle, permanent magnet synchronous motor (PMSM), traction control system, power-off area, rectifier generation
DOI: 10.19595/j.cnki.1000-6753.tces.200504
中图分类号:TM46
张伟伟 男,1989年生,博士,助理研究员,主要研究方向为永磁同步电机驱动控制技术。E-mail: zw7589@163.com
刘计龙 男,1988年生,副研究员,硕士生导师,主要研究方向为永磁同步电机驱动控制技术以及模块化多端口电力电子变换器技术。E-mail: 66976@163.com(通信作者)
收稿日期 2020-05-14
改稿日期 2020-06-29
国家自然科学基金(51807200, 51477180)和国家重点基础研究发展计划(973)(2015CB251004)资助项目。
(编辑 崔文静)