 (1)
(1)摘要 为改善永磁同步直线电机的动态响应性能,提高电机控制系统的鲁棒性,针对传统永磁同步直线电机PID控制方法中参数不确定性导致的控制不稳定问题,提出一种无模型电流控制方法。该文基于超局部模型设计永磁同步直线电机控制系统的无模型电流控制器,分别搭建PID控制和无模型电流控制系统,在此基础上进行稳态运行、负载突加减和电机参数摄动的仿真及实验对比。结果表明,所提方法改善了永磁同步直线电机控制系统的动态响应性能,对电机参数不确定性具有较强的鲁棒性。
关键词:永磁同步直线电机 超局部模型 无模型控制 电流控制
近年来,随着稀土材料的开发,永磁电机在功率密度和效率等方面的性能指标均超过了传统直流电机和交流感应电机。永磁同步直线电机(Permanent Magnet Synchronous Linear Motor, PMSLM)被广泛用于高精密加工、物流传输等现代工业领域。相比于三相电机系统,永磁同步直线电机具有推力密度大、动态响应快和机械损耗小等优点。但PMSLM存在齿槽效应、边端效应和饱和效应,状态量间耦合严重,给系统的高性能控制带来困难[1-5]。传统的永磁同步直线电机控制多采用的PID控制器,对电机参数依赖性大,易受到外界干扰,导致控制精度和稳态性能下降[6-7]。
针对PMSLM控制方法,国内外学者开展了大量研究工作,如自适应控制、鲁棒控制、滑模控制、预测控制等控制策略被应用到永磁同步直线电机控制系统中[7-11]。文献[7]中提出一种基于梯度算法的自适应控制策略,提升了永磁同步直线电机控制系统的动态响应和跟踪性能。文献[8-9]将滑模控制应用于PMSLM控制系统中,对速度控制器进行了优化,保证了系统的鲁棒性和抗扰动能力。文献[10-13]基于内模干扰观测器技术,改进了传统无差拍电流控制算法,提高了永磁同步直线电机电流控制精度。
无模型控制在2014年由M. Fliess提出,其基于系统输入和输出,建立系统的超局部模型,并利用代数辨识方法在线估计系统已知结构、不确定性与外部干扰,能够实现对非线性系统的高性能实时控制[14-15]。目前,无模型控制技术已应用在永磁同步电机控制系统中[15]。文献[14]对内置式永磁同步电机系统的电流差进行检测,基于无模型控制,提出一种预测电流控制方法,提高了对电流的跟踪性能。文献[16]基于无模型控制,设计了内置式永磁同步电机控制系统中转速环的滑模观测器,提升对转速的控制精度。文献[17-21]在面装式永磁同步电机控制系统中,基于超局部模型,提出无模型电流控制,提升了系统控制性能。
本文以PMSLM控制系统为研究对象,基于无模型控制,提出一种新的PMSLM无模型电流控制方法。该方法基于超局部模型,建立PMSLM控制系统的dq轴定子电流的无模型控制器,并通过仿真与传统PID控制方法进行了对比研究。实验结果验证了所提方法的有效性。
PMSLM是一个强耦合、多变量的非线性系统,为简化分析,假设在电机气隙中,励磁磁场与电枢反应磁场均为正弦分布,忽略磁饱和效应、电机涡流和磁滞损耗,不考虑非线性摩擦等因素。在dq轴坐标系下,永磁同步直线电机的电压方程为
(1)定子磁链方程为
 (2)
(2)
由电压方程,可得电流状态方程为
 (3)
(3)电磁推力方程为
 (4)
(4)
机械运动平衡方程为
 (5)
(5)式中, 、
、 、
、 、
、 分别为d、q轴电压与电流;
分别为d、q轴电压与电流; 为定子电阻;
为定子电阻; 为永磁体极距;
为永磁体极距; 为同步运动速度;
为同步运动速度; 、
、 分别为d、q轴电感;
分别为d、q轴电感; 为永磁体磁链;
为永磁体磁链; 为极对数;B为粘滞摩擦因数;f为负载;m为运动部分质量。
为极对数;B为粘滞摩擦因数;f为负载;m为运动部分质量。
超局部模型控制的原理是局部建模,并从输入知识和输出性能两方面对其进行实时更新。一般来说,线性或非线性系统可以用由文献[22]给出的未知微分方程来表示,即
 (6)
(6)式中,u为系统的输入;y为系统的输出;H为其参数的充分光滑函数。为了获得期望轨迹的输出,可以定义超局部模型,通过测量输入和输出来估计参数。在很短的时间内,可以使用超局部模型来表示纯数字模型的系统。
 (7)
(7)
式中,v≥1,v为系统的导数阶; 为一个非物理常数参数,目的是使
为一个非物理常数参数,目的是使 和
和 具有相同的阶数;F为超局部模型参数,包括所有结构参数,如不确定性、扰动及其导数。
具有相同的阶数;F为超局部模型参数,包括所有结构参数,如不确定性、扰动及其导数。
无模型控制方法采用一阶超局部模型进行设计,即v=1,即可实现较好的系统建模精度。在文献[21]中,F的值可用微分代数方法估计,即
 (8)
(8)
由式(8)可得
 (9)
(9)式中, 为F的估计值;y*为期望输出值;
为F的估计值;y*为期望输出值; 可由比例、积分、微分控制器得出。
可由比例、积分、微分控制器得出。
假设F能够被准确估计,本文中可由比例控制器计算,由式(9)可得
 (10)
(10)式中,![]() 为误差,即
为误差,即 ;KP为比例控制器系数。
;KP为比例控制器系数。
对式(8)进行拉氏变换,得到
 (11)
(11)式(11)两边对s求微分,可得
 (12)
(12)
在时域内消除噪声影响,对式(12)乘以s-2,并进行拉氏反变化,可得时域下的系统未知部分估计值为
 (13)
(13)式中,L为采样周期内的一个数值,取决于采样周期和噪声, 。
。
基于PMSLM控制系统的数学模型,由式(8)建立PMSLM超局部模型[23],可表示为
 (14)
(14)式中, 、
、 分别为d、q轴定子电压系数;
分别为d、q轴定子电压系数; 、
、 包含PMSLM控制系统已知部分、参数不确定、系统干扰等未知部分。
包含PMSLM控制系统已知部分、参数不确定、系统干扰等未知部分。
 (15)
(15)
式中,TF为采样周期; 、
、 分别为、的估计值。
分别为、的估计值。
针对面装式PMSLM,设定定子d轴参考值为“0”,采用复化梯形公式计算定积分的近似值,由式(15)在线估计、,可得
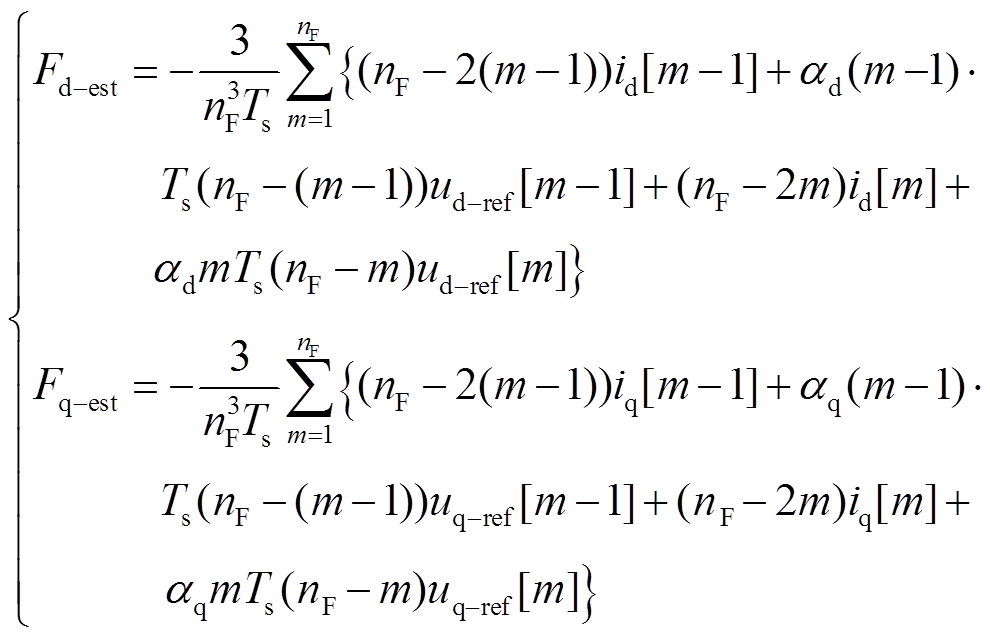 (16)
(16)式中, 、
、 、
、 、
、 为离散采样值;
为离散采样值; 为采样步长。
为采样步长。
根据式(10)设计PMSLM控制系统无模型控制器框图如图1所示,d、q轴电压估计值为
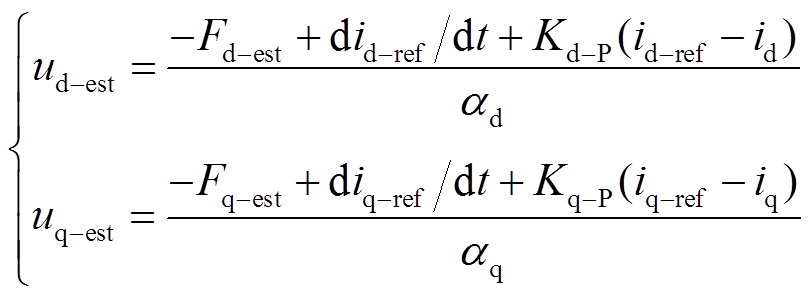 (17)
(17)式中, 、
、 分别为d、q轴电压估计值;
分别为d、q轴电压估计值; 、
、 和、分别为d、q轴电流参考值和实际值;
和、分别为d、q轴电流参考值和实际值; 、
、 为d、q轴比例系数。
为d、q轴比例系数。
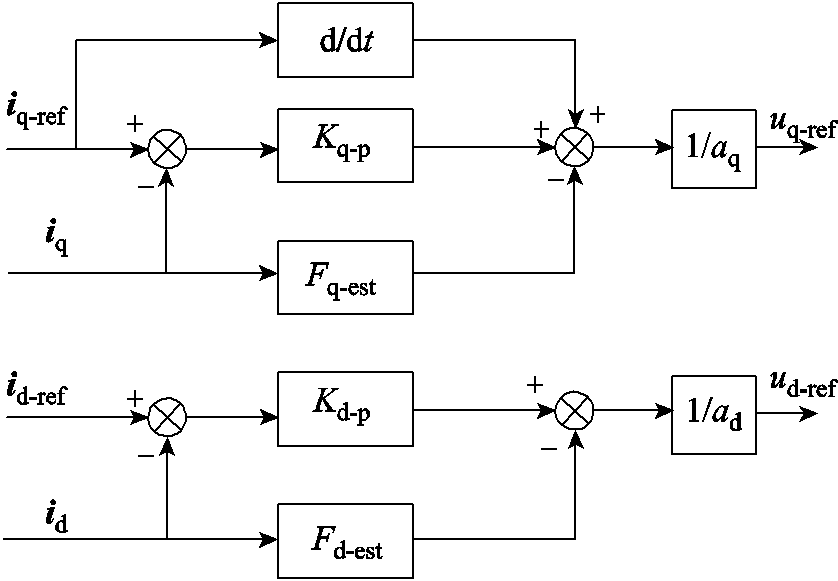
图1 无模型电流控制器结构框图
Fig.1 Model-free current controller
为了验证本文所提永磁同步直线电机无模型电流控制方法的有效性,建立控制原理仿真框图如图2所示,利用Matlab/Simulink仿真平台搭建控制仿真模型进行仿真,并与传统PID控制PMSLM系统进行对比研究。
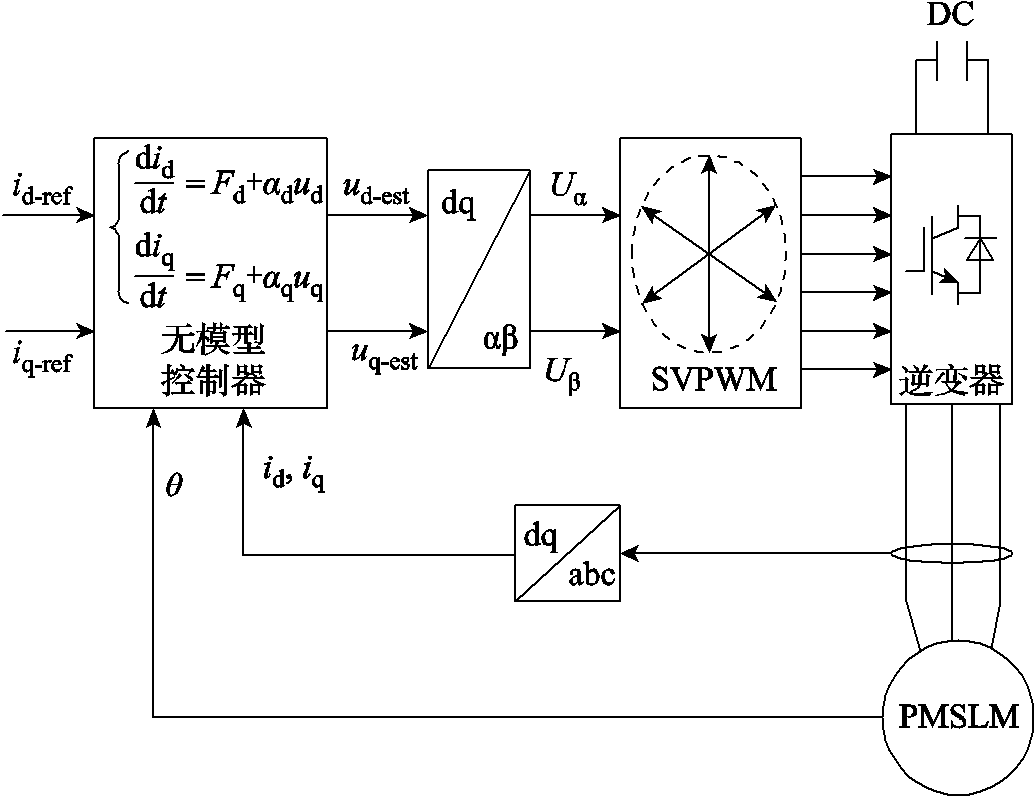
图2 电机控制系统框图
Fig.2 Block diagram of motor control system
仿真中永磁同步直线电机的主要参数见表1。逆变器直流电压 ,开关频率为10kHz。无模型电流控制器参数设置为
,开关频率为10kHz。无模型电流控制器参数设置为 ,
,
 ,
, 。传统PID控制参数选取
。传统PID控制参数选取 。
。
表1 电机主要参数
Tab.1 Main parameters of straight line
参数数值 动子绕组电阻Rs/Ω2.6 d、q轴电感Ld, Lq/H0.026 7 永磁体磁链0.24 电机极对数Pn2 动子质量m/kg1.6 极距τ/mm0.018
为验证PMSLM系统的动静态性能,在电流闭环控制下,设定 ,给定
,给定 ,带载起动,负载设定50N,仿真如图3所示。与传统PID控制相比,无模型控制(Model-Free Control, MFC)中电流反馈值iq不会出现响应时间滞后和超调量的现象,且能迅速上升至稳态值。
,带载起动,负载设定50N,仿真如图3所示。与传统PID控制相比,无模型控制(Model-Free Control, MFC)中电流反馈值iq不会出现响应时间滞后和超调量的现象,且能迅速上升至稳态值。
无模型电流控制器中Fd与Fq的在线估计结果如图4所示。从图4中可以看出估计值快速收敛至稳态,实现了PMSLM控制系统的电流超局部模型的在线建立,使无模型电流控制PMSLM系统获得快速电流响应和稳态控制性能。
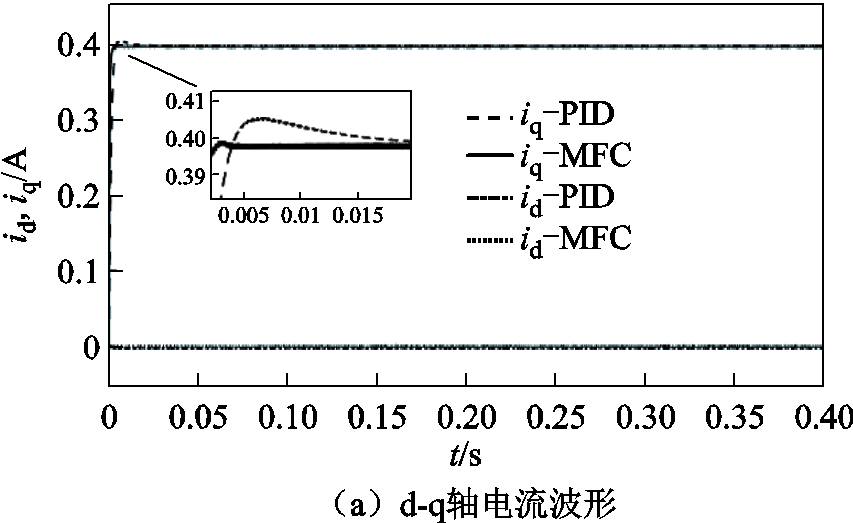
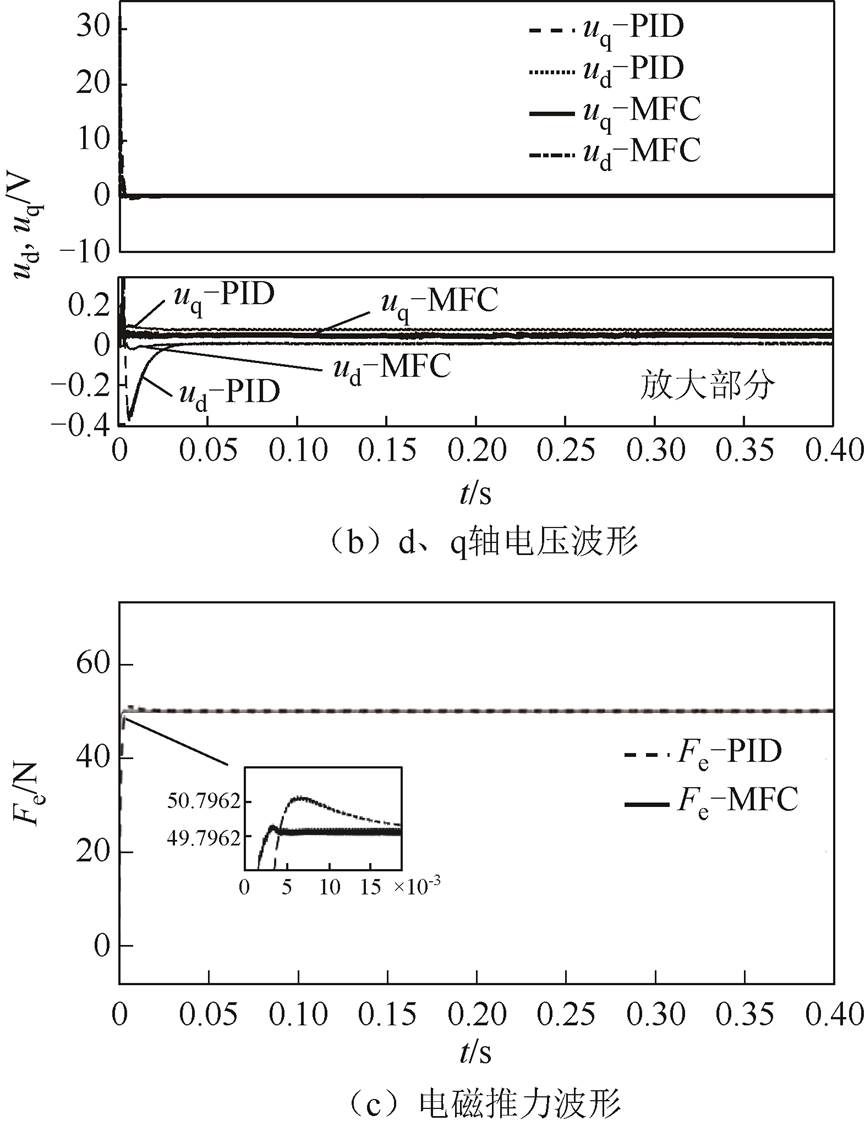
图3 d、q轴电流响应和电磁推力波形对比
Fig.3 d, q axis current response and electromagneticthrust results
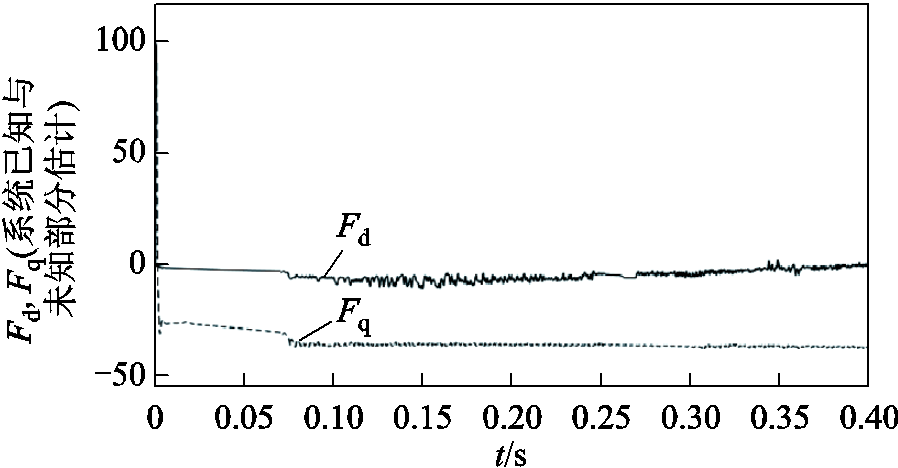
图4 Fd与Fq的在线估计仿真结果
Fig.4 Online estimation of Fd and Fq
在突加突减负载的情况下,对两种控制方法的动态性能进行对比研究,初始负载50N,在电机稳定运行过程中,0.15s时刻负载增至65N,运行一段时间,在0.25s时刻负载降至55N,仿真结果如图5所示。仿真结果表明,本文所提出的方法对应的d、q轴电流和电磁推力Fe超调量相对较小,动态性能也明显优于传统PID控制算法。
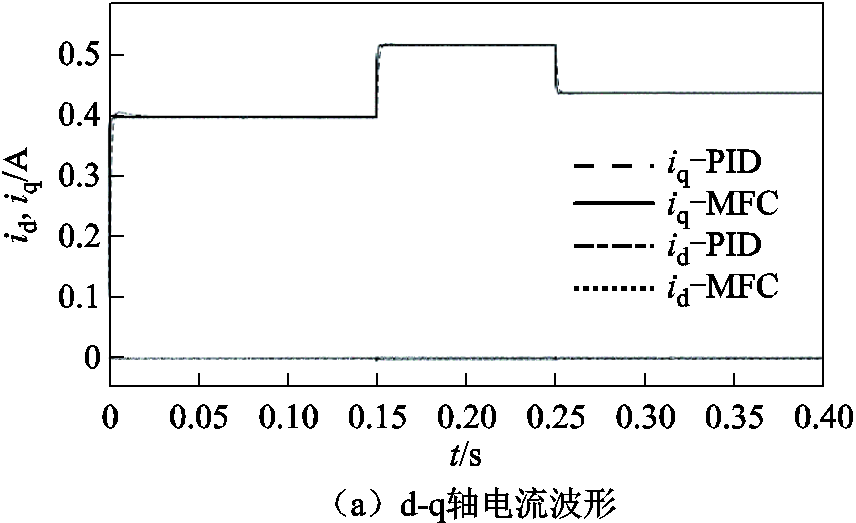

图5 突加减负载d、q轴电流响应和电磁推力对比波形
Fig.5 d, q axis current response and electromagnetic thrust result with load mutation
为验证所提控制方法对电机参数扰动的鲁棒性和抗干扰性能,在相同动态性能测试条件下,对电机参数进行相应改变,分别在0.2s时将电阻、电感、磁链参数设定为0.5Rs、0.6Ldq、1.5 ,并与传统PID控制下参数扰动进行对比,仿真结果如图6所示。
,并与传统PID控制下参数扰动进行对比,仿真结果如图6所示。
从图6a中可以看出,定子电阻摄动时传统PID控制在0.2s处出现较大超调量,无模型电流控制电流波动小,且短时间内恢复到稳定值。图6b为定子电感参数摄动时,两种控制方法下d、q轴电流波形对比。可以看出,两种方法均可以快速跟定给定值,但传统PID控制方法有较小部分超调现象。图6c是两种控制方法在磁链参数变化的电流波形,可以看出,本文所提方法的响应时间和超调量远小于传统PID控制。综上分析,针对电机参数扰动,PMSLM无模型电流控制方法相比于传统PID控制方法具有更好的鲁棒性。
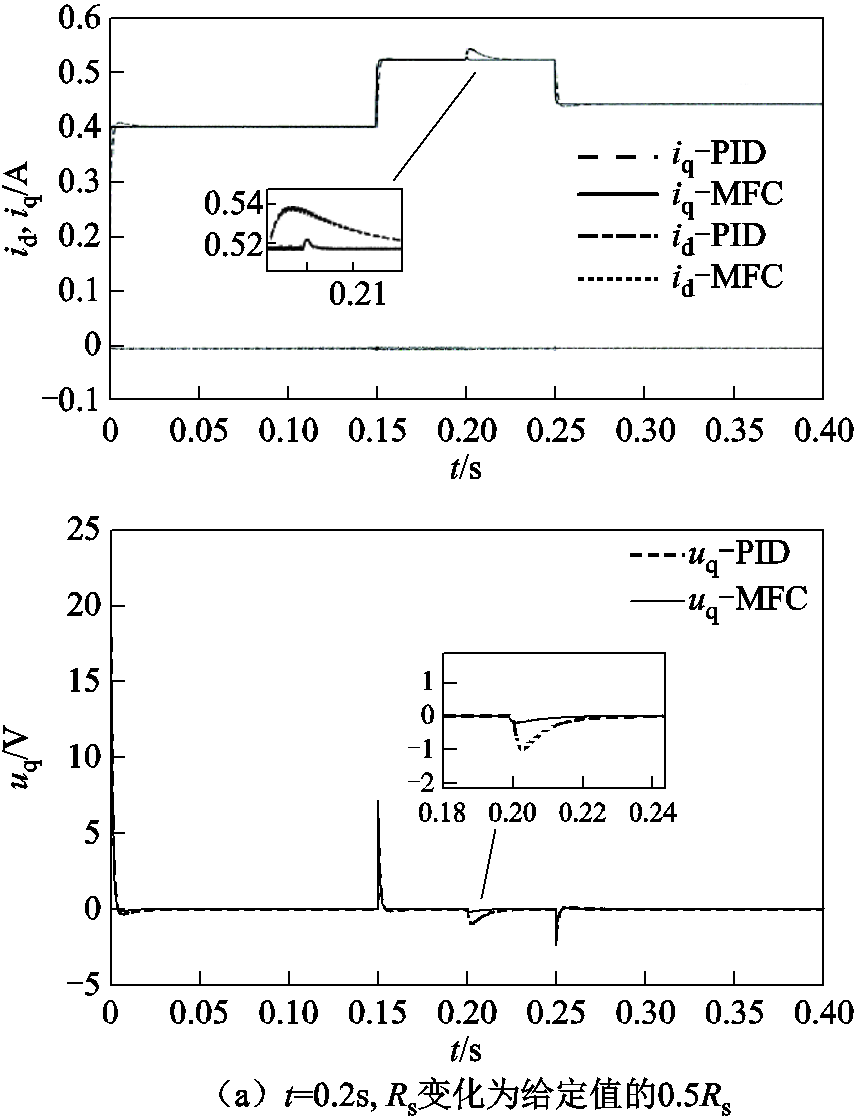
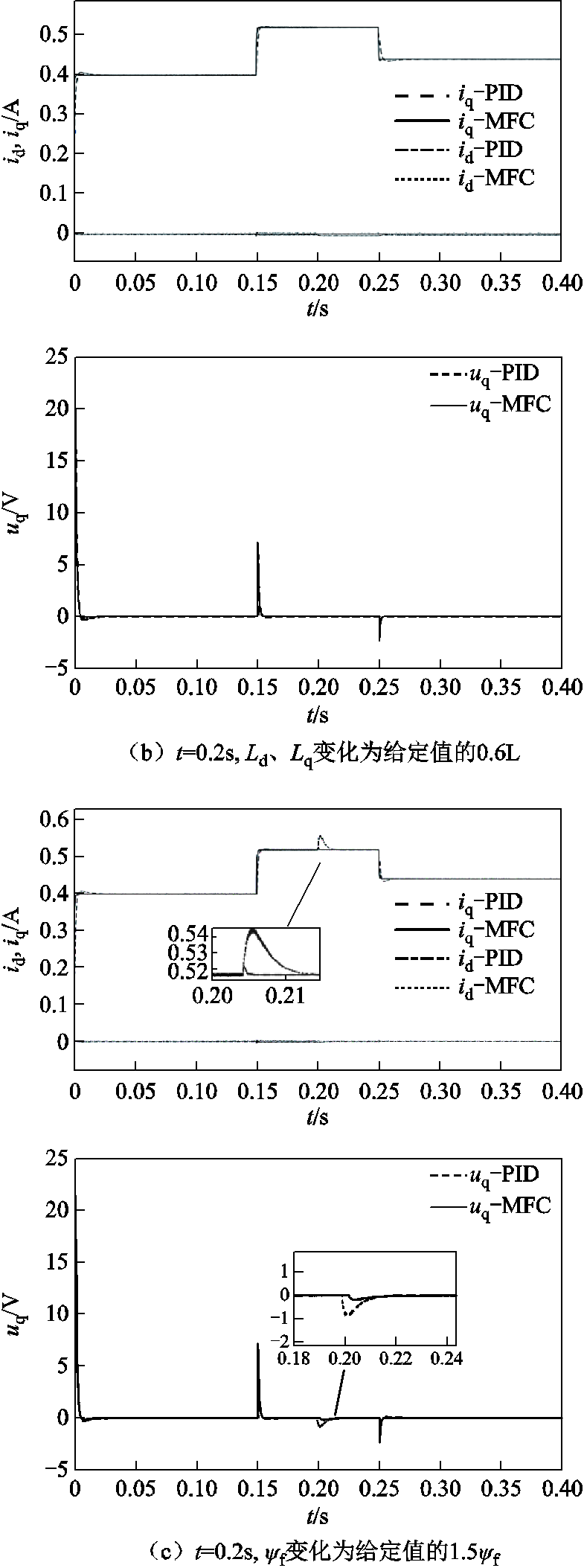
图6 电机参数变化时d、q轴电流响应对比波形
Fig.6 d, q axis current response with changed motor parameter
为验证本文提出的PMSLM无模型电流控制方法,在实验室中搭建半实物仿真平台,实验平台如图7所示。实验平台主要由上位机、ACJ-005-09型Copley伺服驱动器、Galil DMC控制卡、VILT-0400光栅传感器以及精密直线电机组成。在实验时,将编写好的控制系统程序烧录到控制板①,5V变压器②为控制板提供供电电压。将控制板计算出的SVPWM信号传送给驱动板③,驱动板根据信号波将直流电压逆变为交流电控制直线电机④运行。12V变压器⑤链接电磁砝码作为直线电机运行过程中的负载。在直线电机运行过程中,传感器将位置信号、电流信号传送到控制板进行闭环控制运算。本实验对电机运行过程中变负载情况下的q轴电流和电磁推力及改变电机参数时的q轴电流相应波形进行了对比分析。
图8为负载突加突减时,q轴电流的实验波形和电磁推力实验波形。可以看出,使用无模型电流控制方法的控制系统在面对负载变化时,其反应速度更快,并且波动较小。与PID控制策略相比,本文提出的无模型电流控制方法的电磁推力启动超调量较小,整体变化更平滑。

图7 实验平台
Fig.7 Experimental platform
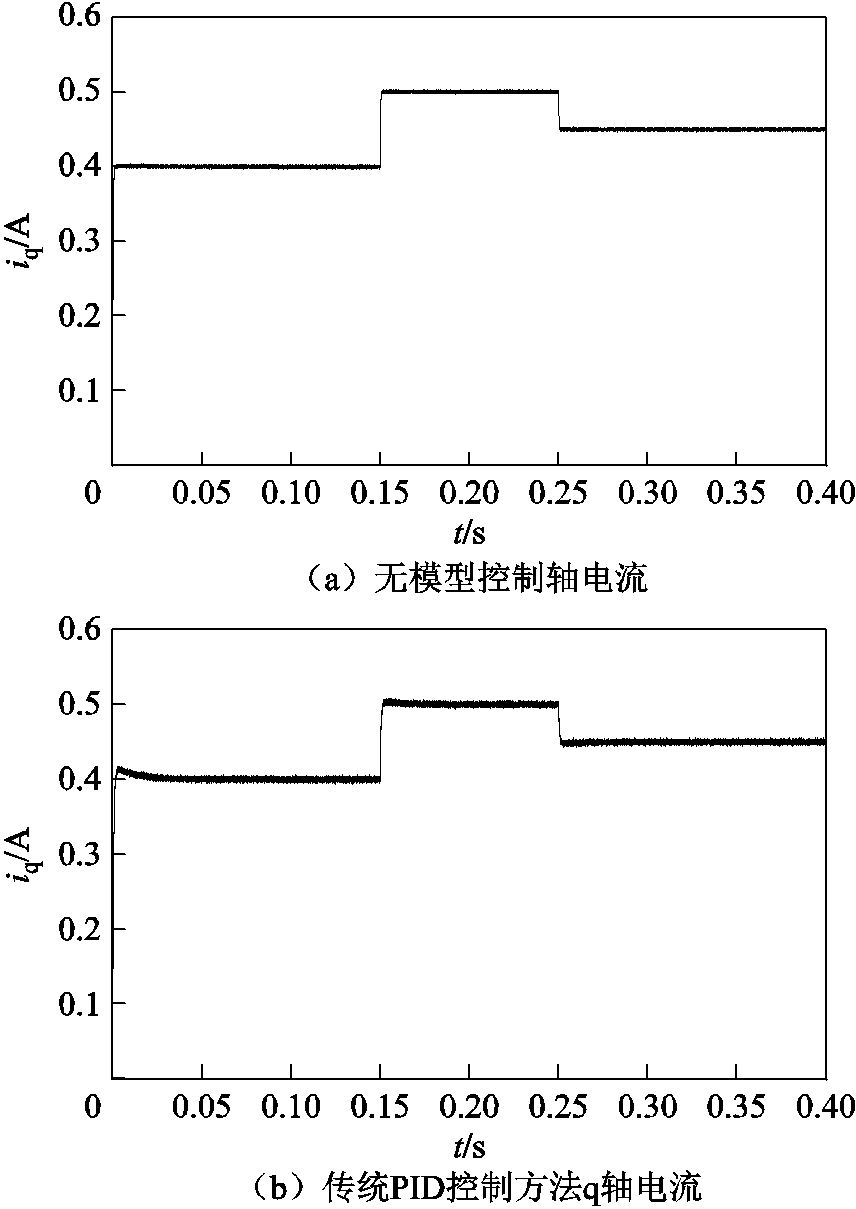
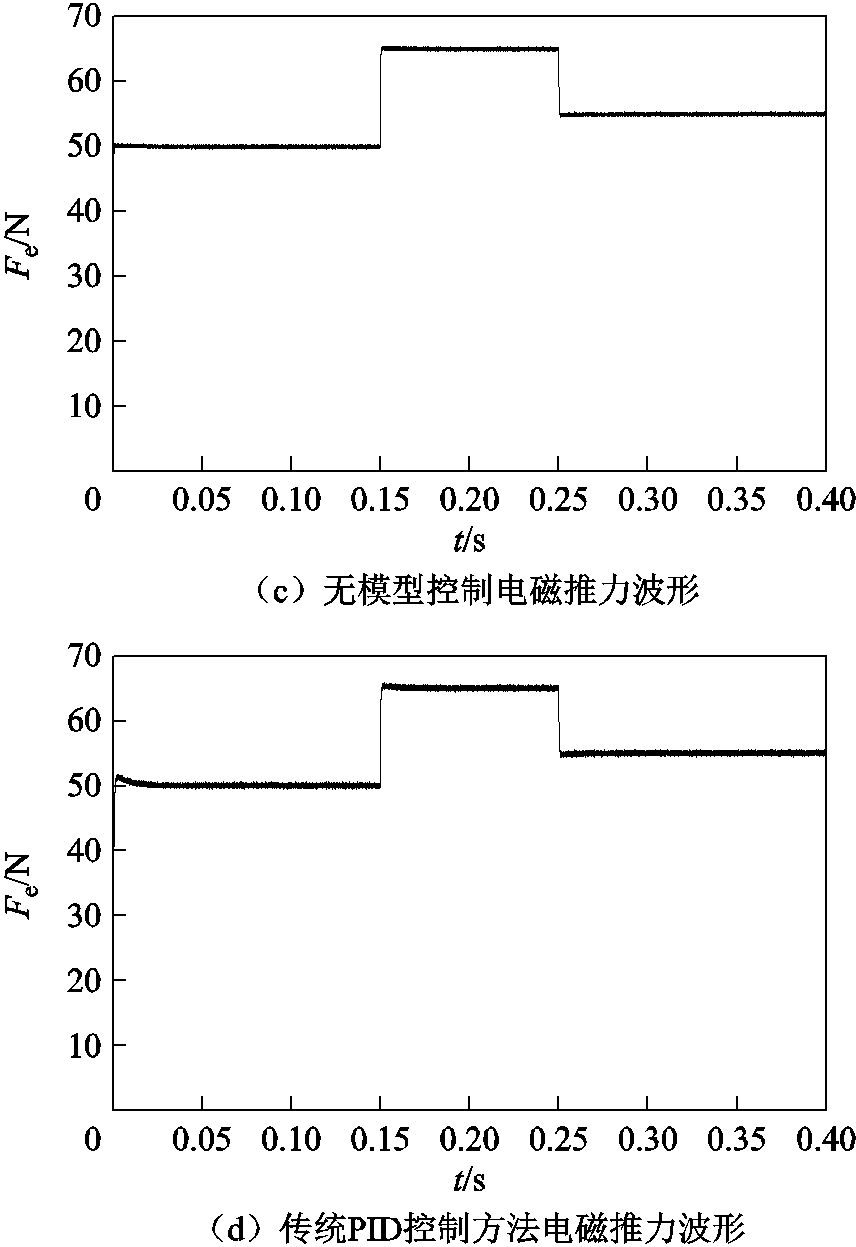
图8 负载变化时q轴电流响应和电磁推力对比波形
Fig.8 q-axis current response and electromagnetic thrust resultwith load mutation
图9为电机参数变化情况下,无模型电流控制与传统PID控制方法的q轴电流波形、无模型电流控制的交流电流和q轴电压信号。由实验结果可以看出,在0.2s时刻改变电阻和磁链参数(如图9a和图9c所示),两种控制策略情况下q轴电流都会有超调,且传统PID控制方法的q轴超调要大。
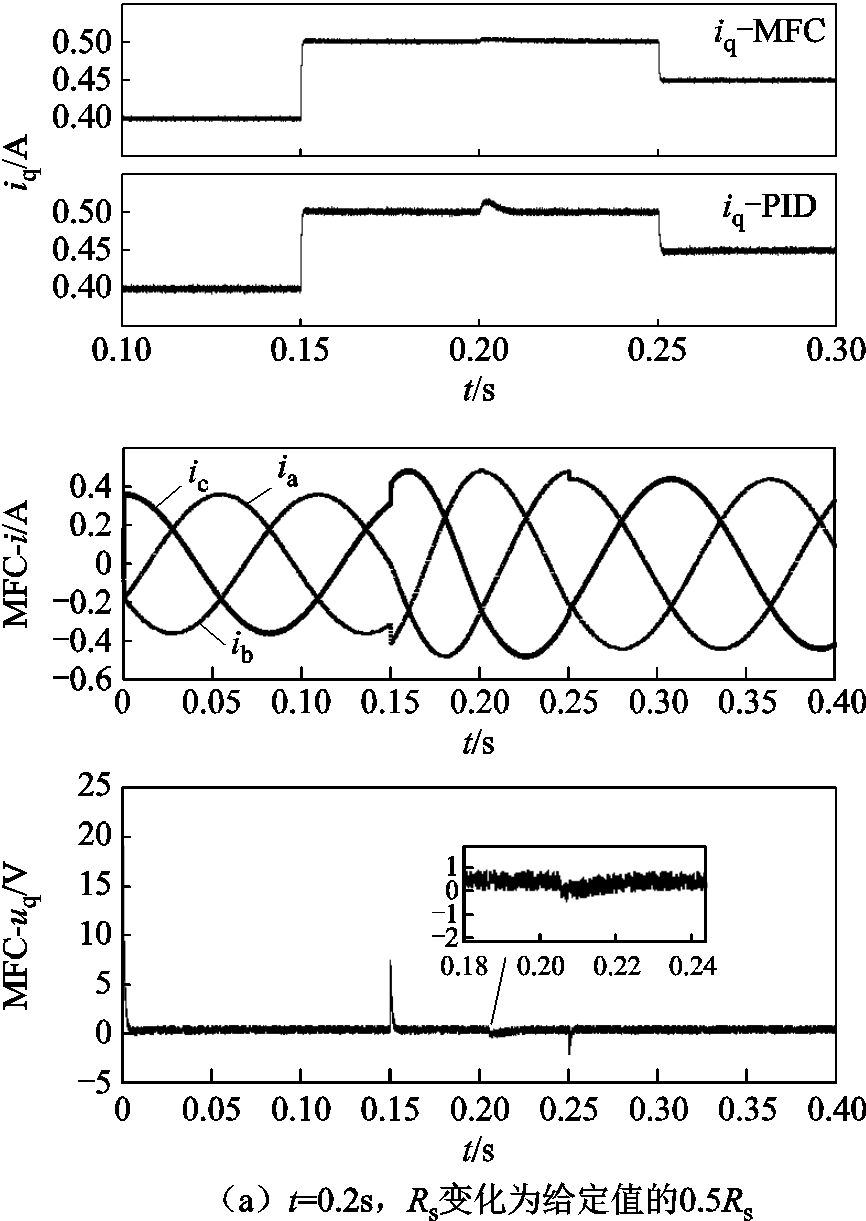
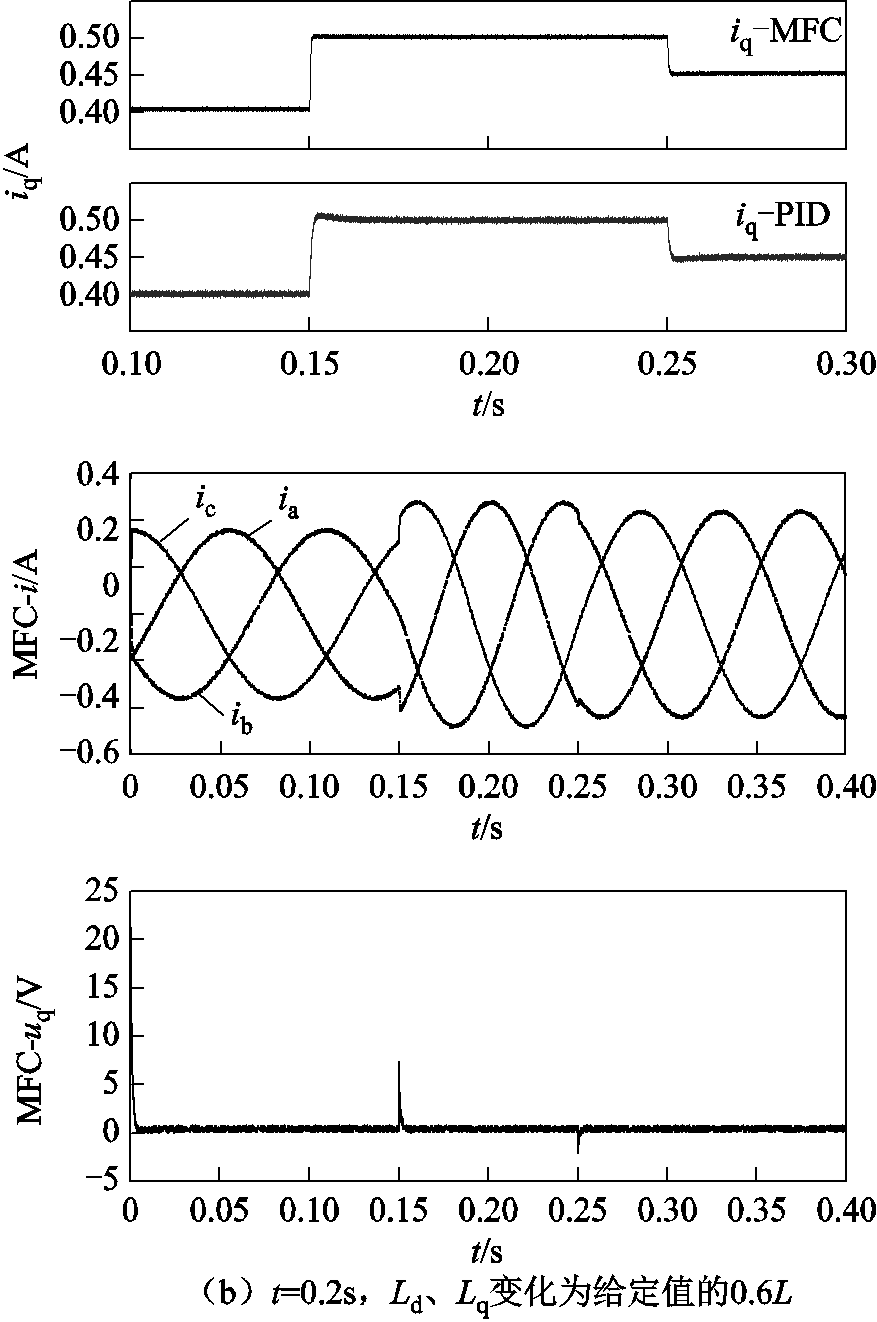
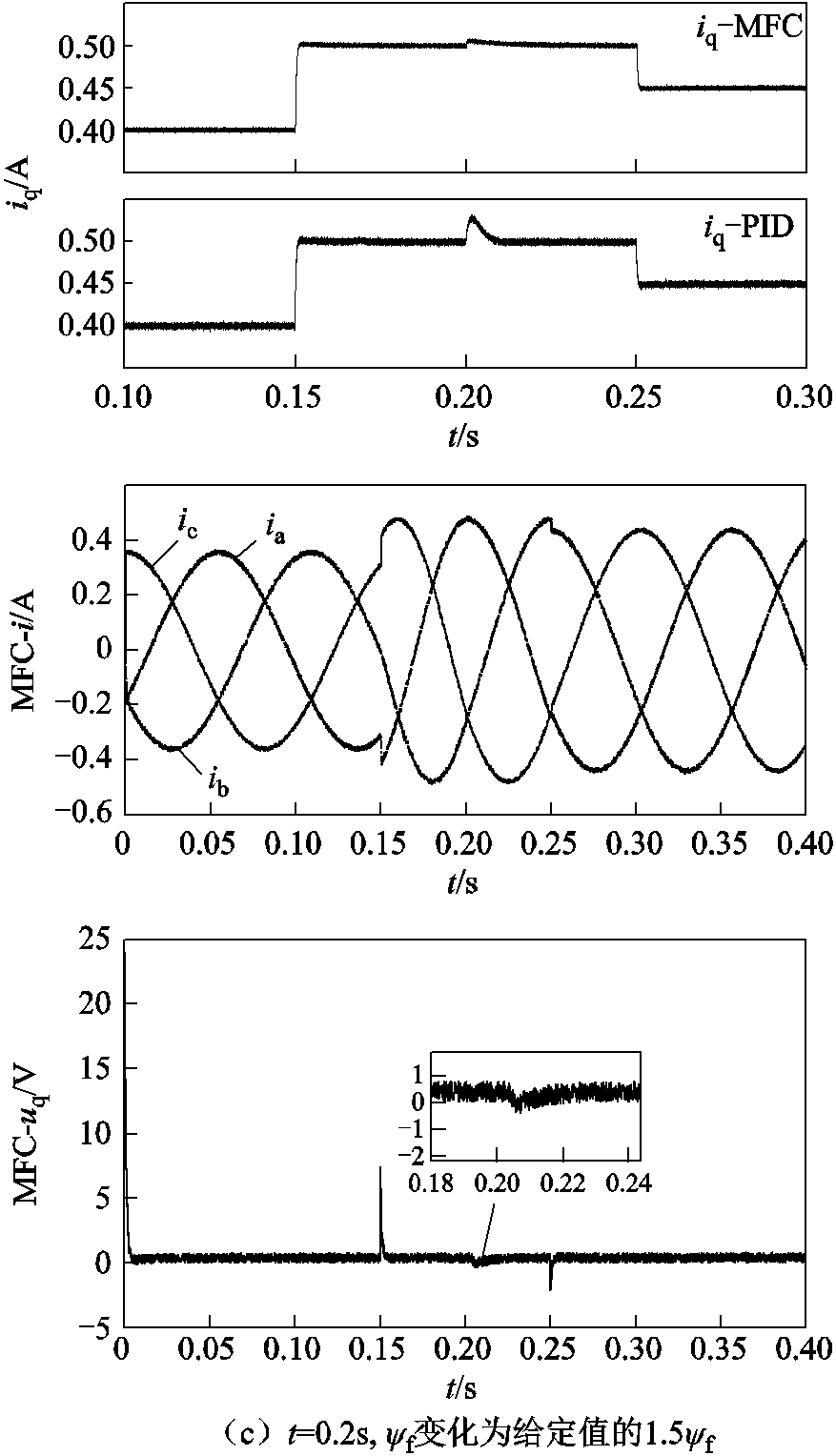
图9 电机参数变化q轴电流响应对比波形
Fig.9 q-axis current response with changed motor parameter
实验结果体现出本文所设计算法具有强鲁棒性,快收敛的特点。当系统电感改变后(图9b所示),两种控制方法的q轴电流波形没有明显变化,但基于无模型电流控制系统的电流运行更平滑,且抖动纹波较小。通过上述的实验分析表明,本文所提的控制方法能实现对永磁同步直线电机的高性能控制,且对电机参数变化抗扰动的鲁棒性强。
本文提出一种无模型电流控制方法,目的在于提高PMSLM控制系统的静动态性能,克服传统PID控制方法对电机参数依赖性强的缺点。通过系统建模仿真和实验证实方法的有效性,相比于传统控制方法,基于无模型电流控制PMSLM系统具有较高的控制精度,在参数变化的情况下,实验结果与仿真结果一致,显示出控制方法具有很好的鲁棒性。
参考文献
[1] 李争, 张家祯, 王群京. U型无铁心永磁同步直线电机磁场建模与分析[J]. 电机与控制应用, 2018, 45(2): 75-80.
Li Zheng, Zhang Jiazhen, Wang Qunjing. Magnetic field modelling and analysis of U-shaped ironless permanent magnet synchronous linear motor[J]. Electric Machine & Control Application, 2018, 45(2): 75-80.
[2] Tang Chuansheng. Direct thrust-controlled pmslm servo system based on back-stepping control[J]. IEEJ Transactions on Electrical & Electronic Engineering, 2018, 13(5): 785-790.
[3] 王明义, 刘家曦, 李立毅, 等. 永磁同步直线电机电流控制优化设计[J]. 电机与控制学报, 2013, 17(11): 28-32.
Wang Mingyi, Liu Jiaxi, Li Liyi, et al. Optimization design of predictive current control for permanent magnet linear synchronous motor[J]. Electric Machines and Control, 2013, 17(11): 28-32.
[4] 金鸿雁, 赵希梅, 原浩. 永磁直线同步电机动态边界层全局互补滑模控制[J]. 电工技术学报, 2020, 35(9): 1945-1951.
Jin Hongyan, Zhao Ximei, Yuan Hao. Dynamic boundary layer global complementary sliding mode control of permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1945-1951.
[5] 谢东燊, 杨俊华, 熊锋俊, 等. 永磁直线同步电机解耦自适应滑模混沌控制[J]. 计算机仿真, 2019, 36(5): 263-268.
Xie Dongshen, Yang Junhua, Xiong Fengjun, et al. Decoupling adaptive sliding mode chaos control of permanent magnet linear synchronous motor[J]. Computer Simulation, 2019, 36(5): 263-268.
[7] 张振宇, 张昱, 陈丽, 等. 永磁同步直线电机DDPG自适应控制[J]. 微电机, 2020, 53(4): 89-92.
Zhang Zhenyu, Zhang Yu, Chen Li, et al. DDPG adaptive control of permanent magnet synchronous linear motor[J]. Micro Motors, 2020, 53(4): 89-92.
[8] 付东学, 赵希梅. 永磁直线同步电机自适应反推全局快速终端滑模控制[J]. 电工技术学报, 2020, 35(8): 1634-1641.
Fu Dongxue, Zhao Ximei. Adaptive backstepping global fast terminal sliding mode control of permanent magnet linear synchronous motor[J]. Journal of Electrotechnical Technology, 2020, 35(8): 1634-1641.
[9] 向凡, 许鸣珠. 基于改进滑模速度控制器的永磁直线同步电机直接推力控制[J]. 电机与控制应用, 2019, 46(6): 38-43.
Xiang Fan, Xu Mingzhu. Direct thrust control of permanent magnet linear synchronous motor based on improved sliding mode speed controller[J]. Electric machines & Control Application, 2019, 46(6): 38-43.
[10] 尹忠刚, 白聪, 杜超, 等. 基于内模干扰观测器的永磁同步直线电机无差拍电流控制方法[J]. 电工技术学报, 2018, 33(24): 5741-5750.
Yin Zhonggang, Bai Cong, Du Chao, et al. Dead beat predictive current control for permanent magnet linear synchronous motor based on internal model disturbance observer[J]. Transactions of China Electrotechnical Society, 2018, 33(24): 5741-5750.
[11] 原浩, 赵希梅. 基于积分滑模的永磁直线同步电动机直接推力控制[J]. 电工技术学报, 2019, 34(3): 483-488.
Yuan Hao, Zhao Ximei. Direct thrust control of permanent magnet linear synchronous motor based on integral sliding mode[J]. Transactions of the Chinese Society of Electrical Engineering, 2019, 34(3): 483-488.
[12] 王立俊, 赵吉文, 董菲, 等. 基于自适应内模观测器的永磁同步直线电机高带宽强鲁棒预测电流控制策略研究[J]. 中国电机工程学报, 2019, 39(10): 3098-3107.
Wang Lijun, Zhao Jiwen, Dong Fei, et al. High-bandwidth and strong robust predictive current control strategy research for permanent magnet synchronous linear motor based on adaptive internal model observer[J]. Proceedings of the CSEE, 2019, 39(10): 3098-3107.
[13] 原浩, 赵希梅. 永磁直线同步电动机伺服系统的自适应加加速度控制[J]. 电工技术学报, 2020, 35(16): 3406-3413.
Yuan Hao, Zhao Ximei. Adaptive jerk control of permanent magnet linear synchronous motor servo system[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3406-3413.
[14] Hu Yuansheng, Hu Cungang, Zhang Pinjia. A novel hybrid seven-level converter for permanent magnet synchronous motor driving system based on model predictive control[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(4): 389-396.
[15] Fliess M, Cedric J. Model-free control and intelligent PID controllers: towards a possible trivialization of nonlinear control[J]. IFAC Proceedings, 2009, 42(10): 1531-1550.
[16] Lin C K, Liu T H, Yu J T, et al. Model-free predictive current control for interior permanent-magnet synchronous motor drives based on current difference detection technique[J]. IEEE Transactions on Industrial Electronics, 2016, 61 (2): 667-681.
[17] Shen Kun, Feng Jianghua, Zhang Jing. Finite control set model predictive control with feedback correction for power converters[J]. China Electrotechnical Society Transactions on Electrical Machines and Systems, 2018, 2(3):312-319.
[18] Zhou Yanan, Li Hongmei, Yao Hongyang. Model-free control of surface mounted pmsm drive system[C]// 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, 2016, 20(6): 175-180.
[19] 李宏韬, 李红梅. PMSM驱动系统的无模型电流控制[J]. 微特电机, 2016, 44(10): 50-53.
Li Hongtao, Li Hongmei. Model-free current predictive control of PMSM drive system[J]. Small& Special Electrical Machines, 2016, 44(10): 50-53.
[20] 张虎, 张永昌, 刘家利, 等. 基于单次电流采样的永磁同步电机无模型预测电流控制[J]. 电工技术学报, 2017, 32(2): 180-187.
Zhang Hu, Zhang Yongchang, Liu Jiali, et al. Model-free predictive current control of permanent magnet synchronous motor based on single current sampling[J]. Transactions of China Electrotechnical Society, 2017, 32(2): 180-187.
[21] Wang Yuchen, Liu Rundong, Li Liwen. Modulated model-free predictive control of pmsm drive system[C]//2019 22nd International Conference on Electrical Machines and Systems(ICEMS), Harbin, China, 2019: 1-6.
[22] 张建荣, 罗国虎, 郭金妹. 基于模糊自适应与PID控制的六自由度工业机器人运动控制策略研究[J]. 科技视界, 2018, 30(8): 5-6.
Zhang Jianrong, Luo Guohu, Guo Jinmei. Research on motion control strategy of 6-dof industrial robot based on fuzzy adaptive and PID control[J]. Science and Technology Vision, 2018, 30(8): 5-6.
[23] Fliess M, Join C. Model-free control[J]. International Journal of Control, 2013, 86: 2228-2252.
Research on Model-Free Current Control of Permanent Magnet Synchronous Linear Motor
Abstract In order to improve the dynamic response performance and the robustness of permanent magnet synchronous linear motor(PMSLM) control system, a novel model free current control method is proposed to solve the control instability caused by the parameter uncertainty in the traditional PID control method of PMSLM drives. Firstly, based on the super local model, the model free current controller of the PMSLM control system is designed. Secondly, the simulation model of PMSLM with PID controller and the model-free current controller are built, compared the output of simulation and experiment under the steady-state operation,the load mutation and the parameter change of motor. The results show that the proposed method improves the dynamic response performance of PMSLM control system and is robust to the uncertainty of motor parameters.
keywords:Permanent magnet synchronous linear motor(PMSLM), ultra-local model, model-free control, current control
DOI:10.19595/j.cnki.1000-6753.tces.200728
中图分类号:TM351
苏光靖 男,1980年生,博士,讲师,研究方向为电机控制。E-mail:sugj@hfut.edu.cn
李 争 男,1980 年生,博士,教授,研究方向为特种电机及其控制。E-mail:Lzhfgd@163.com(通信作者)
国家自然科学基金(51877064, 51877070, 51577048)和河北省自然科学基金(E2018208155)资助项目。
收稿日期 2020-07-28
改稿日期 2021-01-29
(编辑 赫蕾)