图1 仿生磁致伸缩传感单元结构设计
Fig.1 Structural design of a bionic magnetostrictive sensing unit
摘要 受动物毛发的触觉机理启发,该文采用磁敏材料Galfenol细丝设计一种仿生磁致伸缩触觉传感单元。基于逆磁致伸缩效应、线性压磁方程和材料力学原理建立传感单元的输出特性模型,根据模型参数对传感单元进行结构优化以降低空间体积。在COMSOL中搭建传感阵列模型,分析阵列中磁场干扰对输出结果的影响。对3×3传感阵列进行输出特性测试,并将其装载于机械手上进行抓取实验。在H=1.6kA/m的偏置磁场下,传感单元在0~3N作用力下传感阵列输出电压呈线性变化,灵敏度为14.52mV/N,响应时间为30ms;在2N作用力下传感阵列的输出电压均值为96.94mV,灵敏度为48.47mV/N。实验结果表明,研制的传感阵列具有良好的稳定性与灵敏度,应用于机械手抓取物体时能够精确感知接触力信息。
关键词:Galfenol细丝 磁致伸缩传感单元 传感阵列 触觉感知
触觉是人和动物与外界环境交互不可或缺的感觉功能之一,智能机器人可通过触觉传感器实现对接触物体形状、振动、压力大小与分布等信息的感知[1-2]。近年来,国内外研究人员对触觉机理和敏感材料进行不断地深入探究,研发了压电式、压阻式、电容式与光学式传感器。Y. Lee等设计了一种具有高灵敏度和线性度的多层互锁压电薄膜传感器,用于检测0.001 3~353kPa的压力[3]。H. Takao等利用压敏电阻、温度传感器集成技术研制了一种多功能的阵列传感器,可以测量压力与温度,并实现了触摸物体的弹性检测[4]。黄英团队研制了炭黑填充硅橡胶作为弹性电介质的电容式触觉传感器,并且把压力敏感单元排列成可拼接式阵列结构[5]。文献[6]提出了基于检测磁通密度变化的指尖传感器,实现了对抓取薄片物体的实时判别。压阻、压电及电容式传感器制作工艺繁琐,易受外界环境温度影响,信号处理电路相对复杂[7-9]。铁镓磁致伸缩材料(Galfenol)拉伸强度和磁机转化效率高,在较低的偏置磁场下即可表现出优良的磁致伸缩特性,可用作触觉传感器的敏感材料[10-13]。目前所研制的磁致伸缩触觉传感器具有测量精度高、响应速度快等优点,但由于磁敏材料体积以及提供偏置磁场的线圈或者永磁体位置的限制,仍存在传感器结构体积较大,传感单元之间磁场相互干扰等问题[14-16]。
本文设计了一种仿生磁致伸缩触觉传感单元,将Galfenol细丝倾斜放置以模拟动物毛发形态,在其两侧对称放置永磁体以减小传感单元厚度,并根据电磁学理论分析了传感单元输出特性。制作了可装载于机械手上的传感阵列,集成阵列时单元之间共用永磁体,以降低单元之间的磁场干扰。该传感阵列具有体积小、灵敏度高和易于制作的特点,可用于获得机械手接触物体时的触觉信息。
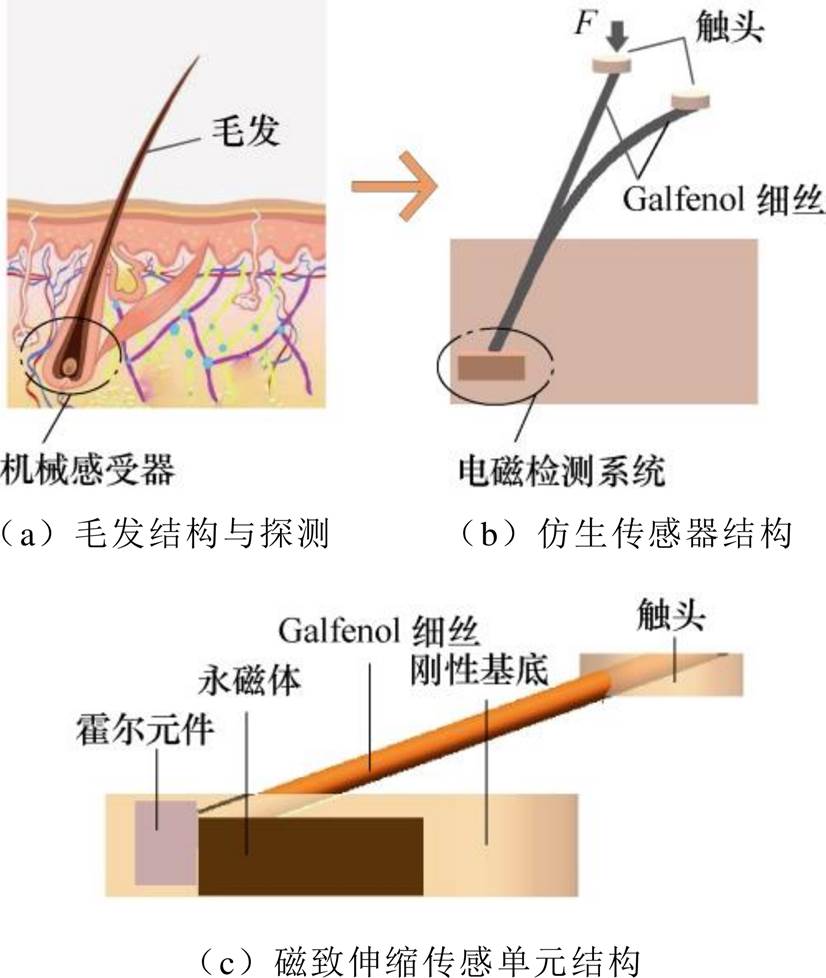
许多动物的触觉器官遍布其身,对于一些长毛动物,毛发感觉系统可以实现触觉感知功能,例如,老鼠能够使用胡须毛接触物体获得其方向和位 置[17-18],蟋蟀、蝎子等尾部的丝状毛发能够检测到微小的空气波动来感知周围环境的变化[19-20],动物出色的毛发感觉系统启发了研究人员开发新的触觉传感器。动物毛发直径一般为70~100mm,不同功能的毛发长度不一,短则如翅类昆虫的纤毛通常不超过10mm,长则如哺乳动物的胡须一般是15~50mm[17-20],毛发具有柔韧性,这使得其在受力状态时弯曲不易折断,非受力状态易于恢复原状,Galfenol细丝与毛发有一定的相似性。毛发通常与动物表皮成一定倾斜角度,裸露在外的毛发探测到细微刺激时将产生偏转位移,深入表皮中的毛根附近分布着机械感受器,通过复杂的神经活动传递并处理触觉信息,具有极高的灵敏度。根据这种生物触感机理,设计了仿生磁致伸缩传感单元结构如图1所示。将天然毛发感觉系统的触感功能视为探测和处理过程(见图1a),采用Galfenol细丝代替毛发以接受压力信号,将放入基底中的霍尔元件、永磁体构成的电磁检测系统等效为机械感受器,如图1b所示。处于磁场中的磁敏材料接触物体时受到挤压变形从而导致周围磁场发生变化,电磁检测系统通过实时测量磁场大小,将磁信号转化为电信号输出。
图1 仿生磁致伸缩传感单元结构设计
Fig.1 Structural design of a bionic magnetostrictive sensing unit
磁致伸缩传感单元由Galfenol细丝、永磁体、霍尔元件、刚性基底和触头组成,结构如图1c所示。Galfenol细丝倾斜固定在刚性基底中构成悬臂梁,自由端覆盖圆形薄触头,作为力的传递元件使细丝弯曲变形;细丝两侧放置极性相同的永磁体,提供水平方向的偏置磁场;霍尔元件放置在细丝的固定端,与永磁体轴线垂直,检测磁场的变化。传感单元的尺寸为12.5mm×5mm×4mm。该磁致伸缩传感单元结构简单、体积小、易于集成阵列,具有良好的鲁棒性和重复性。
当在磁致伸缩传感单元触头上施加外力时,根据逆磁致伸缩效应[21-22],处于磁场中的Galfenol细丝形变导致磁感应强度B发生变化。其本质是磁敏感材料在偏置磁场中受到外力作用,磁畴发生偏转导致磁导率变化,从而改变材料内部和周围的磁通密度。
霍尔元件的输出电压与磁感应强度之间的关系可表示为
 (1)
(1)式中,UH为霍尔传感器的输出电压;KH为等效霍尔系数;KC为磁感应传递系数;BGal为Galfenol细丝内部的磁感应强度。
根据线性压磁方程
 (2)
(2)式中,d33为压磁系数; 为应力;
为应力; 为磁导率;H为偏置磁场强度。以
为磁导率;H为偏置磁场强度。以 为参考电压,传感单元输出电压可以表示为
为参考电压,传感单元输出电压可以表示为
 (3)
(3)
式中,q 为Galfenol细丝倾斜角度。
可见磁感应强度与Galfenol细丝受力后的应变有关。细丝横截面的几何尺寸远小于轴向几何尺寸,将其视为简化悬臂梁结构[15-16, 23],细丝受力弯曲的动力学方程符合欧拉伯努利方程。
以悬臂梁中性轴为x轴,法向方向为z轴。假设磁场沿x轴均匀分布。根据欧拉-伯努利动力学理论,悬臂梁轴向x处横截面上点z处挠度(w )与力(F)的关系为
 (4)
(4)式中,F为在梁自由端施加的力;E为杨氏模量;I为点z处截面惯性矩。
半径为R的圆形截面上惯性矩为
 (5)
(5)在z点处受力应变为
 (6)
(6)
式中,l为梁的长度; 为对挠度的二次导数。
为对挠度的二次导数。
由胡克定律得
 (7)
(7)对于细长梁,在梁自由端施加横向力,忽略梁的纵截面上剪切和挤压应力对正应力影响,梁上的平均应力为
 (8)
(8)
式中,V为梁的体积。
当梁受到竖直向下的力时,可分解为轴向力Fsinq 和垂直于梁轴线的横向力Fcosq,Galfenol细丝受力分析如图2所示。轴向压力作用使梁发生压缩变形,横向力作用使梁发生平面弯曲变形。
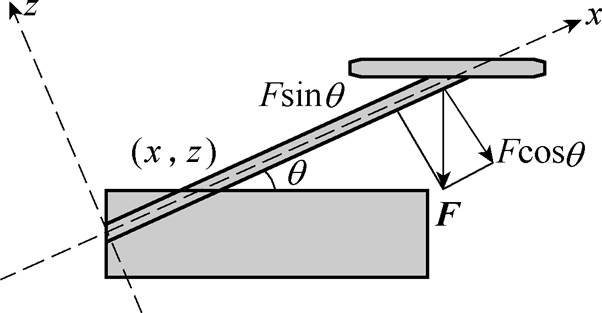
图2 Galfenol细丝受力分析
Fig.2 Galfenol filament analysis
轴向压缩应力为
 (9)
(9)式中,S为梁的横截面积。
垂直于梁轴线的横向应力由式(8)计算得
 (10)
(10)由于 ,忽略轴向压缩应力,将式(8)代入式(3)中,得
,忽略轴向压缩应力,将式(8)代入式(3)中,得
 (11)
(11)
由式(11)可知,传感单元的输出电压U与力F呈线性关系。
由式(11),磁致伸缩传感单元输出电压与细丝材料参数和布置方式密切相关。因此,主要对Galfenol细丝长度、半径和倾斜角度进行优化。实验测试系统由压力调节装置、直流电源、数据采集装置组成。压力调节装置包括信号发生器、功率放大器、直线电机,用于提供垂直方向的静态作用力和动态作用力。直流电源为霍尔元件提供5V的稳定电压。数据采集装置采用江苏东华测试技术公司生产的动态信号测试分析系统,由数据采集卡和PC组成,用来实时测量霍尔元件的输出电压。
Galfenol细丝自由端受到压力,磁畴将旋转至与拉应力平行、与压应力垂直的方向。当细丝受力弯曲时,拉伸应力和压缩应力同时施加在细丝中性轴的相对两侧,因此Galfenol细丝必须能够承受弯曲时引起的拉伸应力和压缩应力[13]。对于指定截面,最大应力发生在距离中性轴最远处;对于指定长度的细丝,最大应力发生在固定端,最大应力可以表示为
 (12)
(12)式中, 为Galfenol细丝的屈服强度;M为弯矩;
为Galfenol细丝的屈服强度;M为弯矩; 为弯曲截面系数。最大应力发生在细丝与基底上表面接触的区域(x=2.5mm处)。传感单元检测的外力范围预期在0~4N,细丝的预期长度不超过10mm,由式(12)计算细丝直径需大于0.42mm,对不同直径和长度的细丝进行了测试,实验中测得最佳偏置磁场为H=1.6kA/m,参考电压为0N时的输出电压
为弯曲截面系数。最大应力发生在细丝与基底上表面接触的区域(x=2.5mm处)。传感单元检测的外力范围预期在0~4N,细丝的预期长度不超过10mm,由式(12)计算细丝直径需大于0.42mm,对不同直径和长度的细丝进行了测试,实验中测得最佳偏置磁场为H=1.6kA/m,参考电压为0N时的输出电压 ,Galfenol细丝参数见表1,长度和直径不同的Galfenol细丝输出电压与力的计算值和实验值如图3所示。长度相同的细丝受到同一作用力,直径为0.5mm的细丝输出电压高于直径为0.8mm的细丝;直径相同的细丝随着长度增加,输出电压增大,灵敏度也随之增大,长度为10mm与8mm的细丝灵敏度最大相差3.42mV/N。随着细丝有效长度增加,直径小的细丝对力的检测范围降低,施加较大作用力时材料易发生屈服现象,导致传感单元灵敏度降低甚至损坏,因此传感单元线性检测范围为0~3N。
,Galfenol细丝参数见表1,长度和直径不同的Galfenol细丝输出电压与力的计算值和实验值如图3所示。长度相同的细丝受到同一作用力,直径为0.5mm的细丝输出电压高于直径为0.8mm的细丝;直径相同的细丝随着长度增加,输出电压增大,灵敏度也随之增大,长度为10mm与8mm的细丝灵敏度最大相差3.42mV/N。随着细丝有效长度增加,直径小的细丝对力的检测范围降低,施加较大作用力时材料易发生屈服现象,导致传感单元灵敏度降低甚至损坏,因此传感单元线性检测范围为0~3N。
表1 Galfenol材料参数
Tab.1 Galfenol material parameters
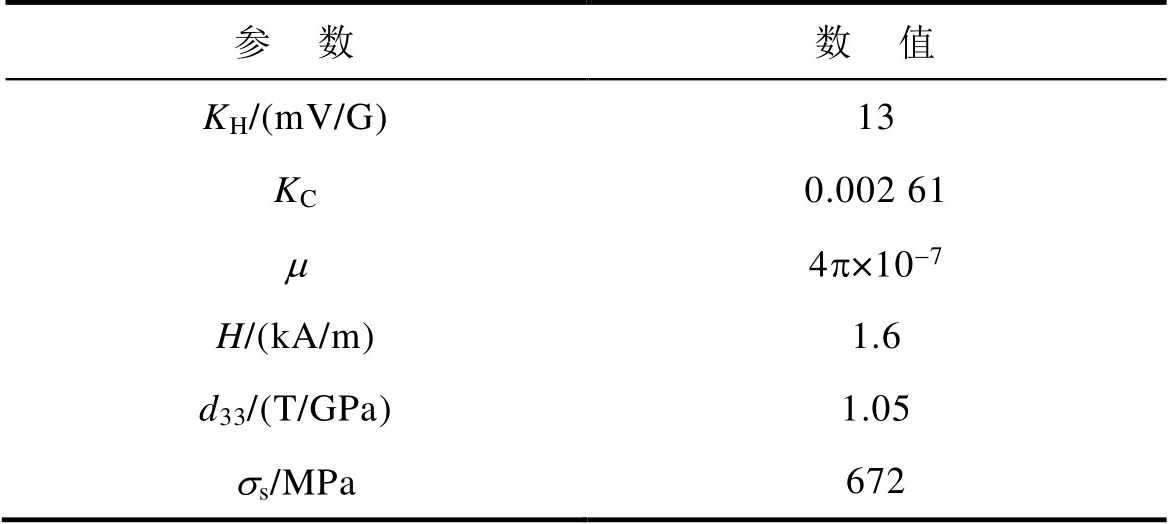
参 数数 值 KH/(mV/G)13 KC0.002 61 m4p×10-7 H/(kA/m)1.6 d33/(T/GPa)1.05 ss/MPa672
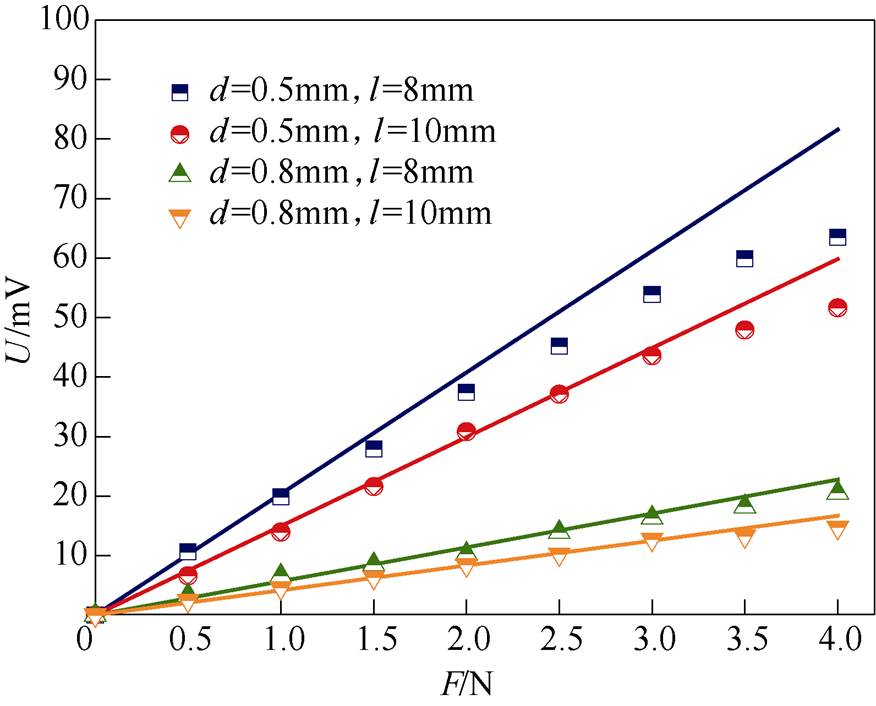
图3 不同长度和直径的Galfenol细丝输出电压与力的关系
Fig.3 Relationship between output voltage and force of Galfenol filaments of different lengths and diameter
动物毛发并非与表皮垂直生长,通常具有一定的倾斜角度(30°~50°不等),由式(11)可知,输出电压与细丝放置的倾斜角度有关,倾斜角度 减小,输出电压增大。对20°、30°和40°倾斜的细丝进行实验测试,固定在基底中的长度保持一致。图4给出了不同倾斜角度Galfenol细丝输出电压随施加作用力变化的计算值和实验值。对同一倾斜角度的细丝施加0~4N的作用力,输出电压与力成正比;压力相同时,值越小,输出电压越大,传感单元灵敏度越高。
减小,输出电压增大。对20°、30°和40°倾斜的细丝进行实验测试,固定在基底中的长度保持一致。图4给出了不同倾斜角度Galfenol细丝输出电压随施加作用力变化的计算值和实验值。对同一倾斜角度的细丝施加0~4N的作用力,输出电压与力成正比;压力相同时,值越小,输出电压越大,传感单元灵敏度越高。
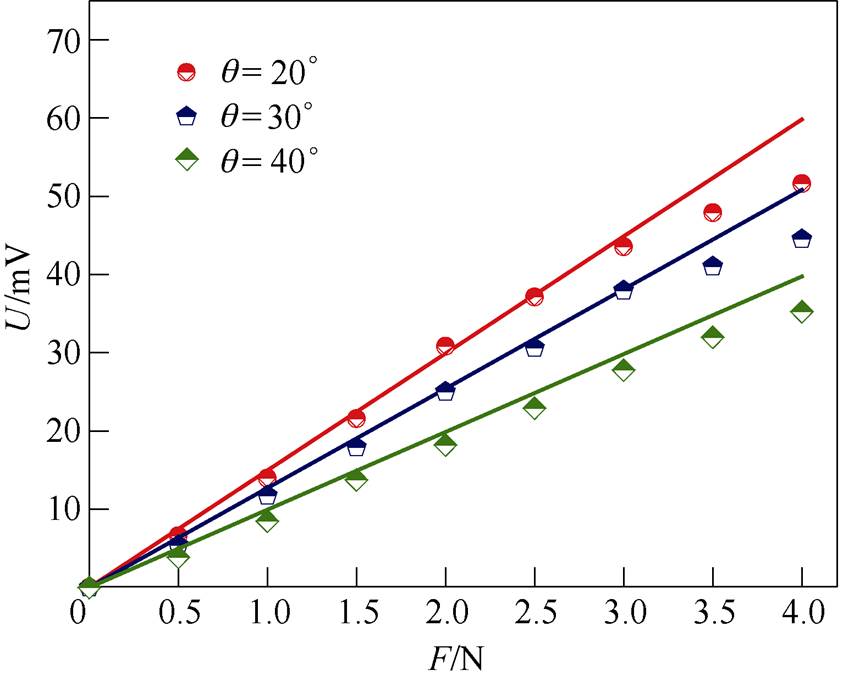
图4 不同倾斜角度Galfenol细丝输出电压与力的关系
Fig.4 Relationship between output voltage and force of Galfenol filaments with different tilt angles
为了降低传感单元空间体积,磁致伸缩传感单元采用长度为8mm,直径为0.5mm,倾斜20°的Galfenol细丝作为磁敏材料,图5为传感单元的静态与动态输出特性曲线。以Vref为参考电压,通过式(11)和表1计算得到传感单元的静态输出曲线,在H=1.6kA/m的偏置磁场下,对传感单元施加0~3N的静态作用力,每组测试10次取平均值,实验结果与理论计算对比如图5a所示。在偏置磁场一定时,输出电压随施加力的增大而增大,在0~3N作用力下输出电压呈线性变化,输出结果与计算结果基本一致。施加3N作用力时输出电压达到43.57mV,灵敏度为14.52mV/N。

图5 磁致伸缩传感单元输出特性曲线
Fig.5 Output characteristic curve of magnetostrictive sensing unit
动态输出特性测试采用直线电机作为动力源,输出电压如图5b所示。在频率为1Hz的动态力作用下,重复加卸载输出电压具有一致性,响应速度达到30ms。与压电式和电容式传感器比较[3, 5],磁致伸缩传感单元响应速度快、输出结果稳定、重复性好。
对于复杂的物体表面,传感单元测量信息有限,需要具有大面积敏感性的阵列来准确地感知触觉信息及其分布。本文设计的仿生磁致伸缩传感单元结构紧凑,易于集成高密度的阵列,但相互临近的永磁体之间存在磁场干扰,从而影响单元的输出结果,图6为传感阵列单元之间相互影响下的仿真计算结果。设计的3×3传感阵列结构如图6a所示,横向布置的传感单元(1~3号,4~6号)可共用永磁体,纵向传感单元(1号和4号)的永磁体之间的距离为s,采用COMSOL软件仿真分析了磁场干扰作用下传感单元之间的相互影响。
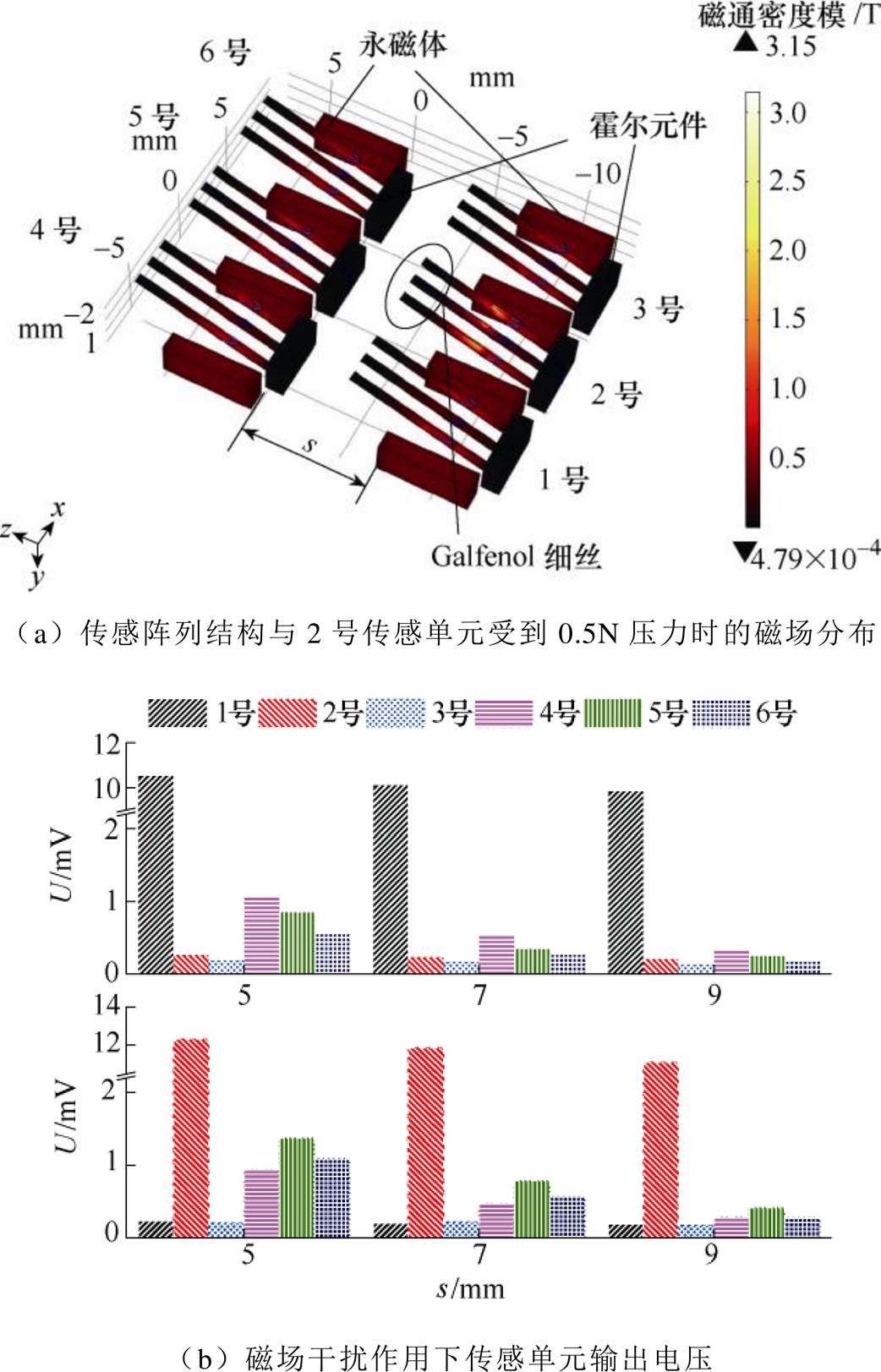
图6 传感阵列结构与传感单元之间的相互影响
Fig.6 Interaction between sensor array structure and sensing unit
在三维模型中对每个永磁体z轴方向添加H= 0.6T的偏置磁场[15, 24],在霍尔元件处对磁场强度进行体积分后求其平均值,得到平均磁场强度为1.6kA/m,与实验中霍尔元件处偏置磁场大小一致。阵列结构完全对称,分别对1号和2号Galfenol细丝施加总力为0.5N的压力,根据式(1)将霍尔元件处平均磁场强度变化量转化为电压变化值,图6b显示了阵列中传感单元的输出电压计算值。永磁体的纵向距离s对传感单元的输出影响定义为纵向磁场干扰。s为5mm、7mm和9mm时,纵向磁场干扰下,非受力单元输出电压占受力单元输出电压平均百分比分别为10.67%、5.97%和3.56%,随着s的增加,纵向磁场干扰影响输出电压占比逐渐减小。同时,将共用永磁体的传感单元之间的输出影响定义为横向磁场干扰。纵向距离不同时,对同一位置的传感单元施加作用力,横向磁场干扰输出电压平均占比分别为2.19%、2.03%和1.8%。由图6b可知,磁场干扰对与受力单元距离最近的传感单元影响最大,并且非受力单元输出电压大小随着与受力单元的距离的增大而逐渐减小。因此,传感单元之间可以共用永磁体以减小横向磁场干扰的影响,控制永磁体距离以减小纵向磁场干扰的影响。
传感单元刚性基底和触头采用光敏树脂材料,通过3D打印模型。采用三根直径为0.5mm,长度为8mm的Galfenol细丝作为磁敏感材料,固定端与水平线呈20°倾斜置入基底,自由端覆盖直径为5mm,厚度为1mm的圆形薄片触头。用砂纸将触头表面和基底尾部多余的Galfenol细丝打磨平滑。将两块极性相同的永磁体(钕铁硼磁钢N42UH)分别固定在基底两侧,为传感单元提供偏置磁场。在基底尾部固定霍尔元件(EQ-730,灵敏度13mV/G),与细丝固定端贴合,用于检测磁场变化。
电路板采用FPC材料,排线双层布置,上层走线连接电源和输出端,下层经通气孔将地线串联引出。连接端设置上下两个电源接口和一个地线接口,其余接口为每个传感单元的输出端,独立输出电压信号。将传感单元固定在FPC板上,横向三个传感单元共用四个永磁体,纵向永磁体的距离为7mm。将霍尔的外置线插入FPC相应的穿孔并用焊枪固定,用砂纸将FPC底部打磨平滑。3×3磁致伸缩传感阵列制作过程和样机如图7所示。该传感阵列结构简单,通过3D打印和简单组装即可完成,并且可以扩展成任意数量的阵列。

图7 磁致伸缩传感阵列制作过程与样机
Fig.7 Magnetostrictive sensor array manufacturing process and prototype
对3×3传感阵列进行输出特性测试,图8给出了施加压力时传感阵列的实时输出电压。依次对1~9号传感单元施加2N的作用力,输出电压均值为96.94mV,多次重复输出电压稳定。由图8结果可见,最大电压与最小电压差值为4.7mV,标准差为1.64mV,传感阵列中的传感单元输出电压基本一致。与图5a的结果相比,相同作用力下阵列中单元输出电压明显增大,这是由于集成阵列时永磁体数量增加,偏置磁场增大导致输出电压增大。传感单元的输出电压是线性变化的(见图5a),传感阵列的灵敏度为48.47mV/N。实验发现,对传感阵列中的一个传感单元施加作用力时,其临近传感单元也会产生电压输出,最大约为受力传感单元的5%,与仿真结果基本一致。
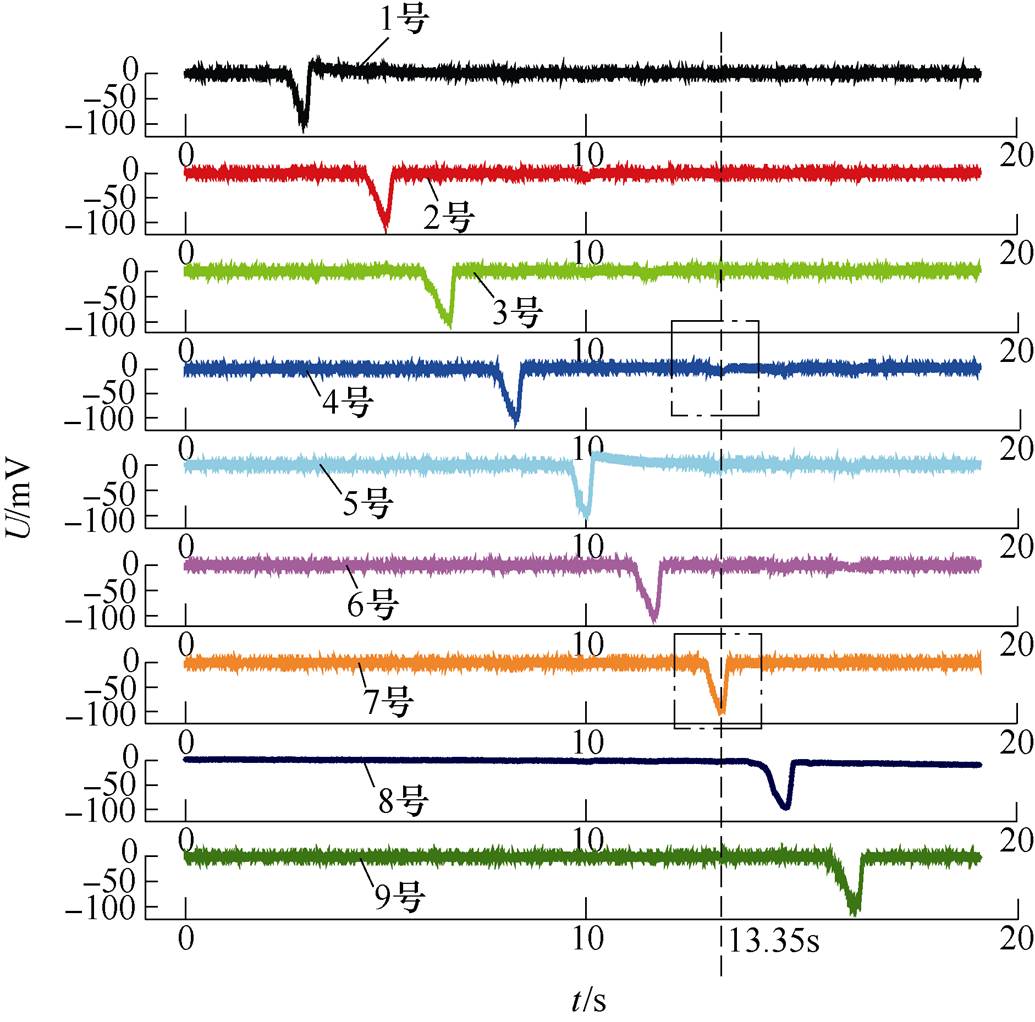
图8 磁致伸缩传感阵列的输出电压
Fig.8 Output of the magnetostrictive sensing array
为了检验传感阵列接触不同物体时的反应,将其安装在二指机械手(COHAND201)的指尖上。机械手由两个手指组成,每个手指有远端和近端两节指骨,由柔软的聚氨酯材料作为关节连接并使其弯曲,装载传感阵列的机械手示意图如图9所示。图10为抓取实验目标样品,由硅胶和3D打印制作而成,样品的尺寸与刚度见表2。
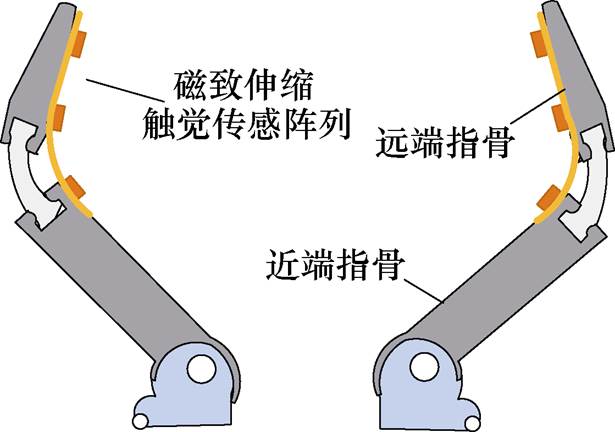
图9 装载传感阵列的机械手示意图
Fig.9 Manipulator loaded with sensor array
实验中模具放在固定位置,机械手指以 =1.5× 10-2m/s的夹取速度水平移动。机械手完全张开位置为0,完全闭合时为1 000。为了记录抓取的有效时间,将初始位置设为500,将4个尺寸相同的被测物体依次放在机械手内部使被测物体的边缘与手指传感阵列接触面距离相同。当手指前进到650时手指开始接触物体,再次前进到750时停止移动,机械手能够稳定抓取物体。将机械手抓取过程分为靠近物体以及稳定抓取物体两个阶段,抓取过程传感阵列输出电压如图11所示。
=1.5× 10-2m/s的夹取速度水平移动。机械手完全张开位置为0,完全闭合时为1 000。为了记录抓取的有效时间,将初始位置设为500,将4个尺寸相同的被测物体依次放在机械手内部使被测物体的边缘与手指传感阵列接触面距离相同。当手指前进到650时手指开始接触物体,再次前进到750时停止移动,机械手能够稳定抓取物体。将机械手抓取过程分为靠近物体以及稳定抓取物体两个阶段,抓取过程传感阵列输出电压如图11所示。
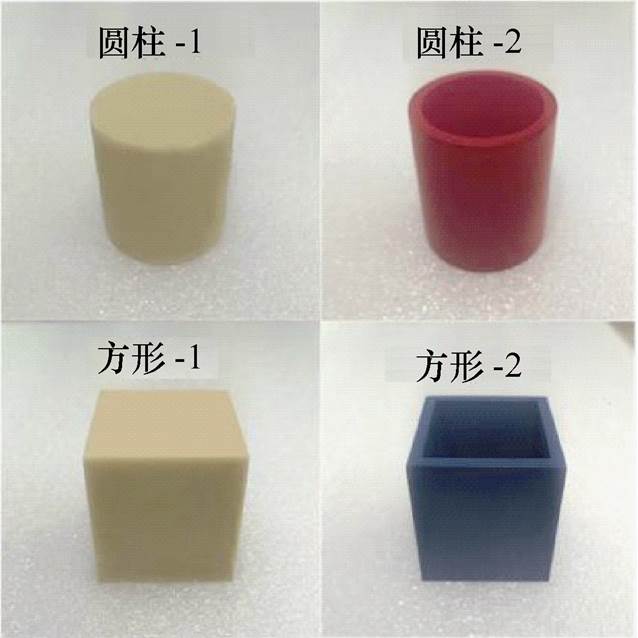
图10 抓取实验目标样品
Fig.10 Grab the experimental target object
表2 实验样品的尺寸与刚度
Tab.2 Parameters of objects of different shapes

物体尺寸/mm刚度/HA 圆柱-1f45×4572 圆柱-2f45×4579 方形-145×45×4572 方形-245×45×4579
抓取尺寸相同、形状不同的样品时阵列单元的输出电压不同。抓取圆柱形样品时,由于机械手指的弯曲,传感阵列与圆柱侧曲面先接触的单元(4~6号)输出电压较高,为26mV左右(圆柱-1);指节弯曲后接触的单元(1~3号)输出电压较低,为8mV左右(圆柱-1);未接触的单元(7~9号)输出电压接近为零。抓取方形样品时,阵列的9个传感单元都与样品接触,其中阵列两端的传感单元(1~3号,7~9号)的输出电压较大,为25mV左右(方形-1),阵列中间的传感单元(4~6号)输出电压较小,为17mV左右(方形-1)。可见,根据单元输出电压的编号(位置)、数量和数值可以判断样品的形状。
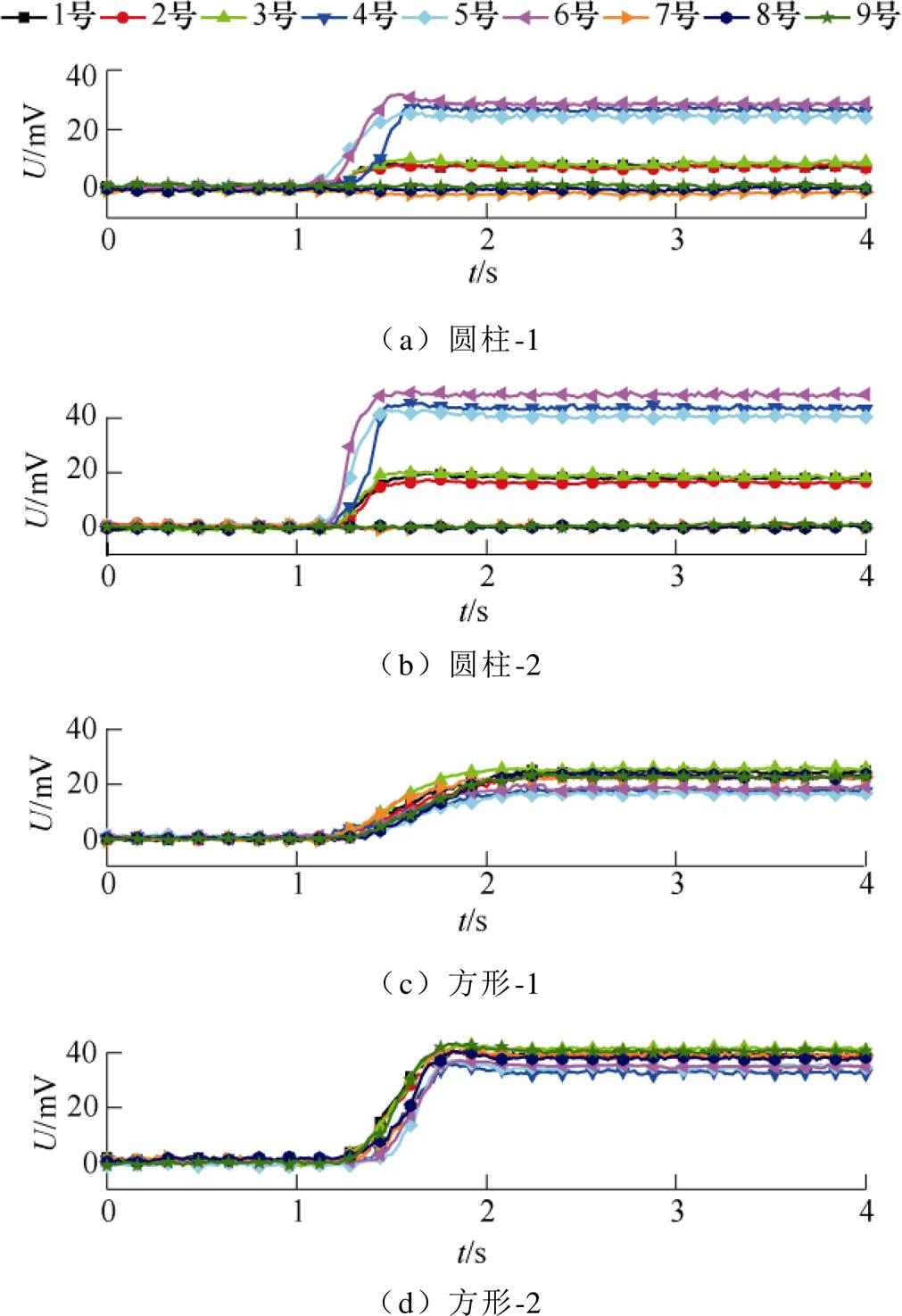
图11 抓取过程传感阵列的输出电压
Fig.11 The output voltage of the sensing array during the grasping process
抓取形状相同、刚度不同的样品时阵列单元的输出电压也有区别。机械手抓取刚度较小的样品时,阵列传感单元的最大输出电压较小,分别为28mV(圆柱-1)和25mV(方形-1);抓取刚度较大的样品时,阵列传感单元的最大输出电压明显增大,分别为48mV(圆柱-2)和41mV(方形-2)。由图11分析发现,抓取刚度大的样品时阵列接触单元的稳定输出电压均有所增大,并且接触样品时刻输出电压变化率也增大。可见,根据阵列接触样品时刻单元的输出电压变化率及稳定后的输出电压,可以简单区分不同刚度和形状的样品。
受动物毛发感觉系统的触觉机理启发,用Galfenol细丝代替毛发,设计并制作了一种仿生磁致伸缩触觉传感单元。基于电磁学理论建立传感单元输出特性模型,该传感单元对施加作用力的线性检测范围为0~3N,输出结果与计算结果基本相符,3N作用力下最大输出电压为43.57mV,灵敏度为14.52mV/N,响应时间为30ms,输出结果稳定,重复性好。采用COMSOL设计并搭建了3×3传感阵列的三维模型,仿真分析了阵列中磁场干扰下的输出影响,与受力单元距离越远,非受力单元输出电压越小,通过单元之间共用永磁体和控制永磁体距离的方式降低阵列中磁场干扰。实验测得,非受力单元输出电压占比约为5%。制作了传感阵列样机,分别对阵列中传感单元施加2N作用力,稳定输出电压平均值为96.94mV,标准差为1.64mV。将传感阵列样机装载于机械手上抓取目标物体,可以实现对机械手抓握物体时接触力的精确感知。
参考文献
[1] Liu Yue, Bao Rongrong, Tao Juan, et al. Recent progress in tactile sensors and their applications in intelligent systems[J]. Science Bulletin, 2020, 65: 70-88.
[2] 张景, 马仲, 李晟, 等. 仿生触觉传感器研究进展[J]. 中国科学(技术科学), 2020, 50(1): 1-16.
Zhang Jing, Ma Zhong, Li Sheng, et al. Research progress of bionic tactile sensor[J]. Science in China (Technology Science), 2020, 50(1): 1-16.
[3] Lee Y, Park J, Cho S, et al. Flexible ferroelectric sensors with ultrahigh pressure sensitivity and linear response over exceptionally broad pressure range[J]. ACS Nano, 2018, 12, 4045-4054.
[4] Takao H, Yawata M, Sawada K, et al. A multi- functional integrated silicon tactile imager with arrays of strain and temperature-sensors on single crystal silicon diaphragm[J]. Sensors & Actuators A Physical, 2010, 160(1): 69-77.
[5] 郭小辉, 黄英, 腾珂, 等. 全柔性电容式触觉传感阵列设计与实验[J]. 电子测量与仪器学报, 2015, 29(9): 1278-1285.
Guo Xiaohui, Huang Ying, Teng Ke, et al. Design and experiment of fully flexible capacitive tactile sensor array[J]. Journal of Electronic Measurement and Instrument, 2015, 29(9): 1278-1285.
[6] Rosle M H, Kojima R, Or K, et al. Soft tactile fingertip to estimate orientation and the contact state of thin rectangular objects[J]. IEEE Robotics and Automation Letters, 2020, 5(1): 159-166.
[7] Ke Ang, Huang Jian, Chen Luyao, et al. Fingertip tactile sensor with single sensing element based on FSR and PVDF[J]. IEEE Sensors Journal, 2019, 19(23): 11100-11112.
[8] Huang Ying, Yuan Haitao, Kan Wenqing, et al. A flexible three-axial capacitive tactile sensor with multilayered dielectric for artificial skin applications[J]. Microsystem Technologies, 2017, 23(6): 1847-1852.
[9] 许玉杰, 孙英, 尹泽楠. 压阻式触觉传感器对法向力和剪切力的检测[J]. 传感器与微系统, 2018, 37(3): 110-114.
Xu Yujie, Sun Ying, Yin Zenan. Piezoresistive tactile sensor for normal force and shear force detection[J]. Sensors and Microsystems, 2018, 37(3): 110-114.
[10] 李媛媛, 王博文, 黄文美, 等. 扭转力作用下Fe-Ga磁致伸缩位移传感器的输出特性[J]. 电工技术学报, 2019, 34(21): 4409-4418.
Li Yuanyuan, Wang Bowen, Huang Wenmei, et al. Output characteristics of Fe-Ga magnetostrictive dis- placement sensor under torsional force[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(21): 4409-4418.
[11] Yoo B, Na S M, Flatau A B, et al. Evaluation of magnetorheological elastomers with oriented Fe-Ga alloy flakes for force sensing applications[J]. IEEE Transactions on Magnetics, 2016, 52(7): 2501104.
[12] Li Dandan, Qiao Zhenyang, Yang Na, et al. Study on vector magnetic properties of magnetic materials using hybrid hysteresis model[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(3): 292-296.
[13] 黄文美, 薛胤龙, 王莉, 等. 考虑动态损耗的超磁致伸缩换能器的多场耦合模型[J]. 电工技术学报, 2016, 31(7): 173-178.
Huang Wenmei, Xue Yinlong, Wang Li, et al. Multi- field coupling model considering dynamic losses for giant magnetostrictive transducers[J]. Transactions of China Electrotechnical Society, 2016, 31(7): 173- 178.
[14] Li Yunkai, Wang Bowen, Li Yuanyuan, et al. Design and output characteristics of magnetostrictive tactile sensor for detecting force and stiffness of mani- pulated objects[J]. IEEE Transactions on Industrial Informatics, 2019, 15(2): 1219-1225.
[15] 李云开, 王博文, 张冰, 等. 铁镓合金的压磁效应与力传感器的研究[J]. 电工技术学报, 2018, 33(21): 140-146.
Li Yunkai, Wang Bowen, Zhang Bing, et al. Piezo- magnetic effect of iron-gallium alloy and the research of force sensor[J]. Transactions of China Electro- technical Society, 2018, 33(21): 140-146.
[16] Zhang Bing, Wang Bowen, Li Yunkai, et al. Detection and identification of object based on a magneto- strictive tactile sensing system[J]. IEEE Transactions on Magnetics, 2018, 54(11): 1-5.
[17] Sullivan J C, Mitchinson B, Pearson M J, et al. Tactile discrimination using active whisker sensors[J]. IEEE Sensor Journal, 2012, 12(2): 350-361.
[18] Evans M, Fox C W, Pearson M J, et al. Whisker- object contact speed affects radial distance estima- tion[C]//IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 2010: 249-254.
[19] Wieskotten S, Dehnhardt G, Mauck B, et al. Hydrodynamic determination of the moving direction of an artificial fin by a harbour seal (phoca vitulina)[J]. Journal of Experimental Biology, 2010, 213(13): 2194-200.
[20] Jaganatharaja R K, Bruinink C M, Hagedoorn B M, et al. Highly-sensitive, biomimetic hair sensor arrays for sensing low-frequency air flows[C]//15th Inter- national Conference on Solid-State Sensors, Actuators and Microsystems, Denver, USA, 2009: 1541-1544.
[21] 张露予, 王博文, 翁玲, 等. 螺旋磁场作用下磁致伸缩位移传感器的输出电压模型及实验[J]. 电工技术学报, 2015, 30(12): 21-26.
Zhang Luyu, Wang Bowen, Weng Ling, et al. The output voltage model of magnetostrictive displacement sensor inhelical magnetic field and its experimental study[J]. Transaction of China Electrotechnical Society, 2015, 30(12): 21-26.
[22] 翁玲, 梁淑智, 王博文, 等. 考虑预应力的双励磁线圈铁镓换能器输出特性[J]. 电工技术学报, 2019, 34(23): 4859-4869.
Weng Ling, Liang Shuzhi, Wang Bowen, et al. Output characteristics of dual-excitation coil iron- gallium transducers considering prestress[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(23): 4859-4869.
[23] 曹淑瑛, 桑杰, 郑加驹, 等. Galfenol悬臂梁能量采集器的机电耦合动态模型[J]. 中国电机工程学报, 2015, 35(21): 5623-5631.
Cao Shuying, Sang Jie, Zheng Jiaju, et al. Electro- mechanical coupling dynamic model of Galfenol cantilever beam energy harvester[J]. Proceedings of the CSEE, 2015, 35(21): 5623-5631.
[24] 张伟超, 来永宝, 赵洪, 等. GMM-FBG光纤电流传感器结构优化及温补模型[J]. 电机与控制学报, 2019, 23(6): 104-110.
Zhang Weichao, Lai Yongbao, Zhao Hong, et al. Structure optimization and temperature compensation model of GMM-FBG optical fiber current sensor[J]. Journal of Electrical Machines and Control, 2019, 23(6): 104-110.
Design and Output Characteristics of Bionic Magnetostrictive Tactile Sensor Array
Abstract Inspired by the tactile mechanism of animal hair, a bionic magnetostrictive tactile sensing unit was designed using the magnetically sensitive material Galfenol filaments. Based on the inverse magnetostrictive effect, linear piezomagnetic equation and material mechanics, the output characteristic model of the sensing unit was established, and the structure of the sensing unit was optimized according to the model parameters to reduce the space volume. A sensor array model was built in COMSOL to analyze the influence of magnetic field interference on the output results. The output characteristics of the 3×3 sensor array were tested and loaded on the mechanical hand for grasping experiment. The experimental results show that, under a bias magnetic field of H=1.6kA/m, the output voltage of the sensing unit changes linearly under the force of 0-3N, the sensitivity is 15.87mV/N, and the response time is 30ms. Under the force of 2N, the average output voltage of the sensor array is 96.94mV, and the sensitivity is 48.47mV/N. The developed sensor array has good stability and sensitivity, and can accurately perceive the contact force information when the manipulator is used to grasp the object.
keywords:Galfenol filament, magnetostrictive sensing unit, sensor array, tactile perception
中图分类号:TP212.1
DOI: 10.19595/j.cnki.1000-6753.tces.200428
国家自然科学基金(51777053,51801053)和河北省自然科学基金(E2017202035,E2019202315)资助项目。
收稿日期 2020-04-30
改稿日期 2020-07-01
刘莎莎 女,1995年生,硕士,研究方向为触觉传感器和新型磁性材料与器件。E-mail: Liusasaa@163.com
王博文 男,1956年生,教授,博士生导师,研究方向为新型磁性材料与器件。E-mail: bwwang@hebut.edu.cn(通信作者)
(编辑 陈 诚)