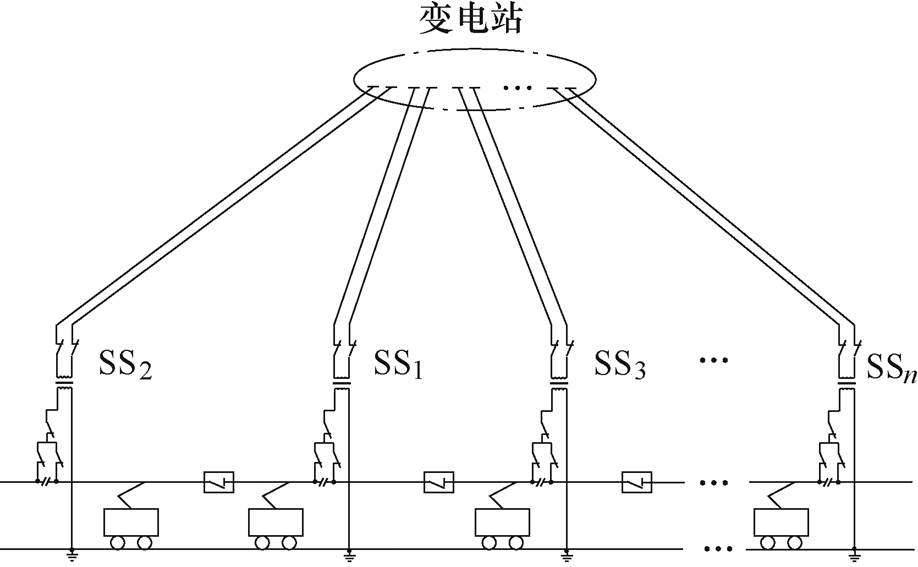
图1 牵引变电所群贯通供电系统示意图
Fig.1 Schematic of the interconnected power supply system of the traction substation group
摘要 针对牵引变电所群贯通供电系统负序补偿问题,该文提出基于一种新型牵引补偿变压器与静止无功发生器的负序补偿方案和控制策略。研究牵引补偿变压器的拓扑结构和负序补偿方案,根据无功补偿单元的数目将补偿方案分为补偿模式Ⅰ、Ⅱ和Ⅲ。从牵引负荷电流有功分量和无功分量角度出发,分别定义负序和无功的约束因子,基于变压器磁动势平衡方程、端口接线方程和对称分量法等构建不同补偿模式下的负序与无功综合补偿数学模型。定义最大无功功率补偿量,将其作为确定补偿方案的依据。提出适用于负序补偿方案的电压和电流双闭环控制策略,通过仿真验证了补偿方案及控制策略的正确性和有效性。基于牵引变电所实测数据分析补偿方案的确定方法,结果表明,合适的补偿方案可以降低补偿装置容量。
关键词:牵引变电所群贯通供电 负序补偿 牵引补偿变压器 静止无功发生器 补偿模式
以青藏线和川藏线为代表的电气化铁路建设面临外部电源薄弱、桥隧占比高、长大坡道多、不宜过多设置电分相等问题,对既有牵引供电方式提出了更高要求和新的挑战。牵引变电所群贯通供电系统能够有效减少线路中的电分相和无电区的数目,提高系统再生制动能量利用率,可作为解决上述问题的有效手段之一[1-2]。其中,负序补偿为其关键技术之一。
电气化铁路负序补偿早期采用并联电容器或者电抗器的补偿方式[1],通过在相应的牵引变压器端口增加电容器或者电抗器实现负序的补偿,存在过补偿或欠补偿现象。随着技术发展,澳大利亚昆士兰等电气化铁路采用静止无功补偿器进行负序等电能质量治理,但是占地面积和投资均较大,且受接入点电压影响[3-4]。铁路功率调节器由日本学者首先提出,可实现负序等电能质量问题的治理,但是因电分相存在而引起的问题仍未得到解决[5-9]。德国等采用变流器方式实现贯通同相供电,可解决负序和电分相问题,但较高的成本使其应用范围有限[4]。同相供电概念首先由西南交通大学提出,既可以治理负序也可以取消变电所出口处的电分相[10-13],其中以组合式同相供电技术为代表,先后在山西中南部铁路通道沙峪牵引变电所和温州市域铁路S1线成功应用[14]。就牵引变电所群贯通供电系统负序补偿而言,可将其分为分布式补偿(在每个牵引变电所设置负序补偿装置)和集中式补偿(在一个牵引变电所设置负序补偿装置)两类。由于组合式同相供电可实现容量最佳配置[12],故分布式补偿优先考虑组合式同相供电技术。相较于分布式补偿,集中式补偿可以最大限度降低补偿装置的容量,减少成本投资。对于集中式补偿,有功补偿方案需调度有功潮流完成负序补偿,当设置补偿装置的牵引变电所的牵引负荷远小于总牵引负荷时,可能会出现功率反送的现象,故需研究无功补偿方案。
不同于采用三相静止无功发生器(Static Var Generator, SVG)进行负序治理[15-16],本文针对牵引变电所群贯通供电系统,从集中补偿的角度出发,提出基于一种新型牵引补偿变压器和单相SVG的负序补偿方案、控制策略及补偿方案的确定方法,最大限度降低SVG装置容量。介绍了负序补偿方案及原理,构建负序与无功的综合补偿模型,将其分为补偿模式Ⅰ、Ⅱ和Ⅲ;通过定义最大无功功率补偿量给出了确定补偿模式的策略;针对相关方案给出了负序补偿的控制策略,通过仿真验证其正确性和有效性;利用牵引变电所实测数据分析补偿方案的确定方法。
牵引变电所群贯通供电系统示意图如图1所示,n(n≥2)个牵引变电所SS1, SS2,…, SSn向牵引负荷提供相同相位的电源,牵引变压器二次侧牵引网实现贯通供电[2],图中,牵引网以直供方式为例,牵引变压器进线均为AB相。
图1 牵引变电所群贯通供电系统示意图
Fig.1 Schematic of the interconnected power supply system of the traction substation group
当公共连接点(Point of Common Coupling, PCC)处负序超出国家相关标准规定时[17],获取各个牵引变电所负荷实时数据,在n个牵引变电所中,选择在线路中间位置且靠近PCC处的牵引变电所设置负序补偿装置,对负序进行集中补偿,将该牵引变电所称为中心牵引变电所(Central Traction Sub- station, CTS),本文将SS1作为CTS,其余n-1个牵引变电所为普通牵引变电所,采用单相变压器。CTS采用一种新型牵引补偿变压器[18],如图2所示,兼顾牵引变压器和补偿变压器的作用;将变压器一个补偿端口的SVG记为一个无功补偿单元,根据无功补偿单元的数目,将基于该新型牵引补偿变压器的负序补偿方式分为补偿模式Ⅰ(无功补偿单元数目为2)、补偿模式Ⅱ(无功补偿单元数目为3)和补偿模式Ⅲ(无功补偿单元数目为4)。
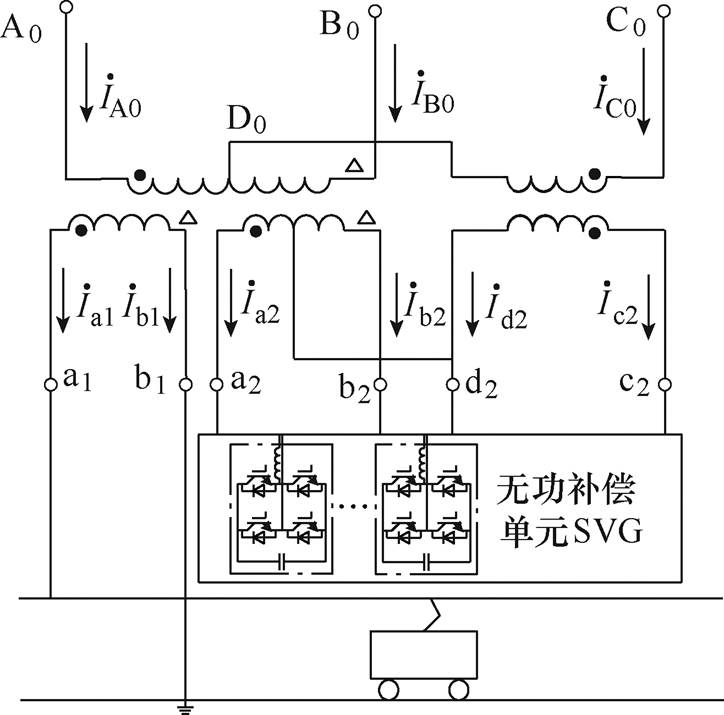
图2 新型牵引补偿变压器示意图
Fig.2 Schematic diagram of a new traction compensation transformer
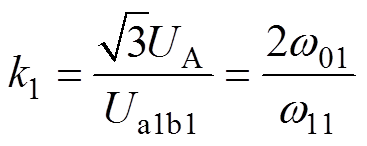
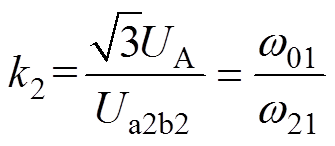
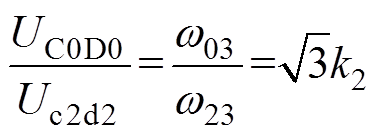
图2中,A0、B0和C0为变压器一次绕组端子,D0为绕组A0B0的中点,a1、b1、a2、b2和c2为变压器二次绕组端子,d2为绕组a2b2的中点,其中,端子a1和b1构成牵引端口,端子a2、b2、c2和d2构成补偿端口。一次绕组A0D0、D0B0和C0D0的匝数分别为w01、w02和w03;二次绕组a1b1、a2d2、d2b2和c2d2的匝数分别为w11、w21、w22和w23;各绕组之间满足w01=w02, 和w21=w22=w23。
和w21=w22=w23。
当一次绕组端子依次接入电网A、B和C相时,变压器一次侧A、B和C相进线电压的相量形式为 、
、 和
和 ;二次侧端口a2b2和c2d2形成90°夹角,a2c2和c2b2分别与端口a2b2形成45°夹角。图2中,
;二次侧端口a2b2和c2d2形成90°夹角,a2c2和c2b2分别与端口a2b2形成45°夹角。图2中, 、
、 、
、 和
和 、
、 、
、 、
、 、
、 、
、 分别为变压器一次和二次绕组电流的相量形式。
分别为变压器一次和二次绕组电流的相量形式。
将图2中变压器绕组进行规格化定向[1, 19],列写磁动势平衡方程为
 (1)
(1)绕组接线方程为
 (2)
(2)
式(1)和式(2)联立求解,得
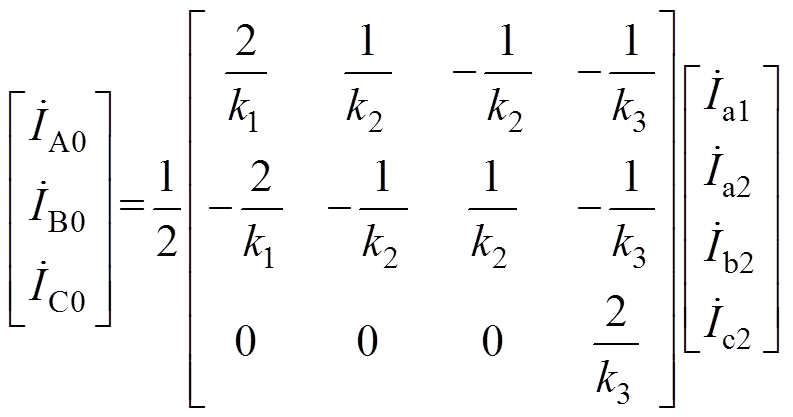 (3)
(3)其中

式中,UA为的模值; 、
、 和
和 分别为变压器端口C0D0、a2b2和c2d2电压的有效值。
分别为变压器端口C0D0、a2b2和c2d2电压的有效值。
变压器补偿端口a2c2和b2c2设置SVG,用于补偿牵引负荷基波电流有功分量产生的负序电流,对应SVG发出的无功电流分别为 和
和
 ,其中,j为复数单位,j1和j2分别为补偿端口1和2的功率因数角,I1和I2分别为
,其中,j为复数单位,j1和j2分别为补偿端口1和2的功率因数角,I1和I2分别为 和
和 的模值。
的模值。
变压器补偿端口a2b2、a2d2、d2b2和c2d2设置SVG用于补偿牵引负荷基波电流无功分量产生的负序电流,由于变压器补偿端口a2b2、a2d2和d2b2的端口接线角(端口电压滞后A相电压的角度)相同,3个端口补偿功能相同[1],故分析时补偿端口以a2b2为例。补偿端口a2b2和c2d2对应SVG发出的无功电流分别为 和
和 ,其中,j3和j4分别为补偿端口3和4的功率因数角,I3和I4分别为
,其中,j3和j4分别为补偿端口3和4的功率因数角,I3和I4分别为 和
和 的模值。
的模值。
将补偿端口a2c2、b2c2、a2b2(a2d2或d2b2)和c2d2的SVG分别记为无偿补偿单元1、2、3和4,当j1=j2=j3=j4=90°时,I1、I2、I3和I4均大于等于0;当j1=j2=j3=j4=-90°时,I1、I2、I3和I4均小于等于0,对于、、和的取值不变。因此,令jk=-90°(k=1, 2, 3, 4),若Ik>0,则表示为SVG发出容性无功功率,若Ik<0,则发出感性无功功率,若Ik=0,则表示SVG不投入工作。
若总牵引负荷电流为 ,根据SVG与补偿端口的接线关系,将式(3)中的、、分别用、、和表示,将
,根据SVG与补偿端口的接线关系,将式(3)中的、、分别用、、和表示,将 、
、 、
、
 和
和 代入式(3),得到PCC处A、B和C相电流
代入式(3),得到PCC处A、B和C相电流 、
、 和
和 为
为
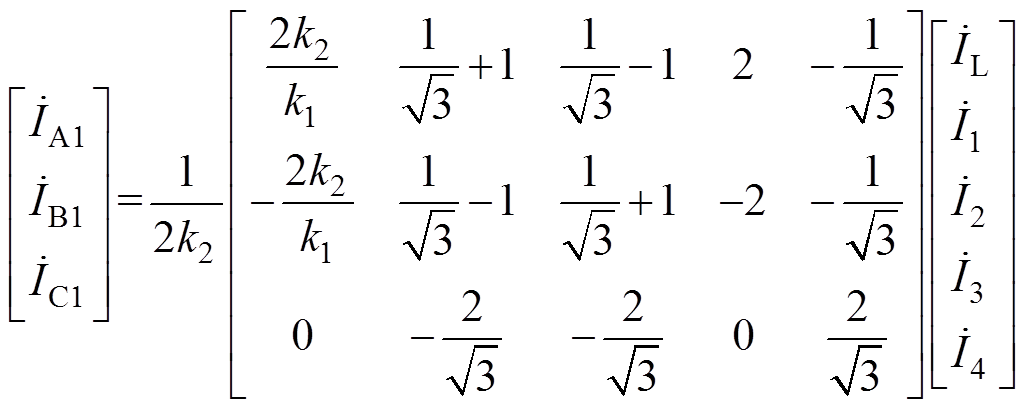 (4)
(4)将式(4)两边均左乘[1 a2a]/3,其中, 得到A相负序电流
得到A相负序电流 为
为
 (5)
(5)
式中, 为的模值;jL为牵引负荷端口的功率因数角。
为的模值;jL为牵引负荷端口的功率因数角。
分别定义负序约束因子KN1和KN2,利用KN1和KN2分别对基波电流IL的有功分量ILp=ILcosjL和无功分量ILq=ILsinjL产生的负序电流进行约束,则 的另一种表示形式为
的另一种表示形式为
 (6)
(6)式中,0≤KN1≤1;0≤KN2≤1。
将式(5)和式(6)的实部与虚部分别对应相等,则有
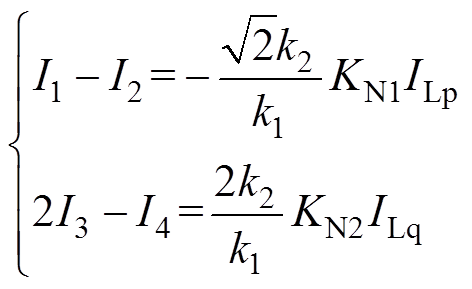 (7)
(7)若CTS处牵引负荷电流为 ,令式(3)中的
,令式(3)中的 ,得到补偿后CTS处的三相复功率
,得到补偿后CTS处的三相复功率 为
为
 (8)
(8)
式中, 、
、 和
和 分别为
分别为 、
、 和
和 的共轭;I1L为的模值。
的共轭;I1L为的模值。
分别定义无功约束因子KC1和KC2,利用KC1和KC2分别对补偿ILp和ILq产生的负序电流的无功功率进行约束,则的另一种表示形式为
 (9)
(9)其中
I1Lp=I1Lcosj1L
I1Lq=I1Lsinj1L
式中,I1Lp、I1Lq分别为CTS处牵引负荷基波电流的有功分量和无功分量。
将式(8)和式(9)的实部与虚部对应,则有
 (10)
(10)综上,由式(7)和式(10)构成负序补偿的数学模型,联立求解得到各个SVG发出的无功电流的大小分别为
 (11)
(11)
 (12)
(12) (13)
(13)
 (14)
(14)
由式(11)~式(14)可知,机车功率因数为1时,只需无功补偿单元SVG1和SVG2即可实现负序的补偿,包含完全补偿和部分补偿;当机车功率因数不为1时,通过控制KN1、KN2、KC1和KC2的取值可以实现负序的完全补偿和部分补偿。
(1)补偿模式Ⅰ
无功补偿单元数目为2,分别单独对ILp或ILq产生的负序电流进行补偿,有两种组合方式:①在补偿端口a2c2和b2c2设置SVG,对应的补偿电流取值数学模型见式(11)和式(12),记为补偿模式Ⅰ之方式1;②在端口a2b2和c2d2设置SVG,对应的补偿电流取值数学模型见式(13)和式(14),记为补偿模式Ⅰ之方式2。由于分别对ILp或ILq产生的负序电流进行补偿,当牵引负荷功率因数不为1时,该补偿模式并不能够实现负序的完全补偿。
(2)补偿模式Ⅱ
定义总无功功率约束因子为KC=KC1+KC2。补偿模式Ⅱ下无功补偿单元数目为3,有四种组合方式。
补偿模式Ⅱ之方式1,即在端口a2c2、b2c2和a2b2设置SVG,此时KC2I1Lq=KN2ILq,将其代入式(11)~式(14)中,对应端口的SVG补偿电流取值 、
、 和
和 的数学模型分别为
的数学模型分别为
 (15)
(15) (16)
(16)
 (17)
(17)
补偿模式Ⅱ之方式2,即在端口a2c2、b2c2和c2d2设置SVG,此时KC2I1Lq+KN2ILq=0,将其代入式(11)~式(14)中,对应端口的补偿电流取值 、
、 和
和 的数学模型分别为
的数学模型分别为
 (18)
(18) (19)
(19)
 (20)
(20)
补偿模式Ⅱ之方式3,即在端口a2c2、a2b2和c2d2设置SVG,此时KC1I1Lq+KN1ILq=0,将其代入式(11)~式(14)中,对应端口的补偿电流取值 、
、 和
和 的数学模型分别为
的数学模型分别为
 (21)
(21) (22)
(22)
 (23)
(23)
补偿模式Ⅱ之方式4,即在端口b2c2、a2b2和c2d2设置SVG,此时KC1I1Lq=KN1ILq,将其代入式(11)~式(14)中,对应端口的补偿电流取值 、
、 和
和 的数学模型分别为
的数学模型分别为
 (24)
(24) (25)
(25)
 (26)
(26)
(3)补偿模式Ⅲ
无功补偿单元数目为4,分别在端口a2c2、b2c2、a2b2和c2d2设置SVG,对应端口的补偿电流取值的数学模型见式(11)~式(14)。
采用补偿模式Ⅰ、Ⅱ和Ⅲ之后,PCC处三相电压不平衡度和CTS处功率因数均应达到相关标准要求[17, 20]。设定补偿后的三相电压不平衡度为eU1,则PCC处A相负序电流的模值 [17]为
[17]为
 (27)
(27)式中,Sd为PCC处短路容量。
式(6)和式(27)联立,得
 (28)
(28)其中
式中,eU0为补偿前PCC处三相电压不平衡度。
由于在CTS仅采用无功功率补偿,故其有功功率不变,补偿后仅对无功功率有影响。设QCTS为SVG发出的无功功率之和,补偿前CTS处功率因数为cosj1L,补偿后CTS处的有功功率仍为S1Lcosj1L,补偿后无功功率为S1Lsinj1L+QCTS。则补偿后CTS处的功率因数 为
为
 (29)
(29)其中
式中,S1L为CTS处牵引负荷视在功率;U1L为CTS处变压器二次侧牵引端口电压模值。
为避免补偿中无功出现过补偿的情形,要求S1Lcosj1L+QCTS≥0,即1-KC1-KC2≥0。将式(9)和式(29)联立,得
 (30)
(30)将式(11)~式(14)分别乘以对应补偿端口的端口电压 、、
、、 和
和 ,求得SVG发出的无功功率S1、S2、S3和S4分别为
,求得SVG发出的无功功率S1、S2、S3和S4分别为
 (31)
(31)
 (32)
(32) (33)
(33)
 (34)
(34)
式中,SL为总牵引负荷视在功率。
同理,可计算得到补偿模式Ⅱ的SVG容量,见附录。式(31)~式(34)中的KN1、KN2、KC1和KC2确定后,补偿模式随之确定,各个补偿端口的SVG发出的无功功率的大小也随之确定。通常电气化铁路牵引负荷具有日周期性,则可以日周期数据为例确定SVG的计算容量[20],在计算容量的基础上进一步根据线路的近远期运量和装置备用方式等确定SVG的安装容量。定义全天N0个时刻为t1, t2,…,tN0,时刻tx∈{t1, t2,…,tN0}(x=1,…,N0)时无功补偿单元k的容量为Sk(tx),则无功补偿单元的计算容量为{|Sk(t1)|,|Sk(t2)|,…,|Sk(tN0)|}中的最大值。以补偿装置容量作为确定补偿模式的依据,定义最大无功功率补偿量SΣ,即各个补偿单元计算容量的最大值之和,有
 (35)
(35)式中,m为无功补偿单元的数目,由补偿模式确定;max{ }为求取一组数据的最大值;| |为求取绝对值。
国标对于PCC处负序限值规定了95%概率大值eU95%和最大值eU100%两个限值[17],设对应的eU1的期望值分别为eU1,95%和eU1,100%,满足eU1,95%≤eU95%,eU1,100%≤eU100%的约束条件。
将全天数据按照升序排序,排序后的数据点编号记为nj(nj∈[1, N0]),将数据点nj∈[1, N95%]描述为范围1,将数据点nj∈[N95%+1, N100%]描述为范围2,其中,N95%=95%N0,N100%=N0。根据补偿后eU1,95%和eU1,100%取值的不同,补偿模式Ⅰ、Ⅱ和Ⅲ可分为两种策略:①策略1,eU1,95%≤eU1,100%≤eU95%;②策略2,eU1,95%≤eU95%≤eU1,100%≤eU100%。
综上,根据数据范围及策略的不同,将数据分为区域A1、A2和A3,补偿后数据分布区域见表1。
在满足负序和功率因数相关标准的前提下[17, 20],确定eU1和 的补偿期望值及补偿策略后,选择该策略下较小容量的补偿模式作为最终补偿方案。不同补偿策略下补偿模式的确定方法及步骤如下:
的补偿期望值及补偿策略后,选择该策略下较小容量的补偿模式作为最终补偿方案。不同补偿策略下补偿模式的确定方法及步骤如下:
表1 补偿后数据分布区域
Tab.1 Data distribution area after compensation
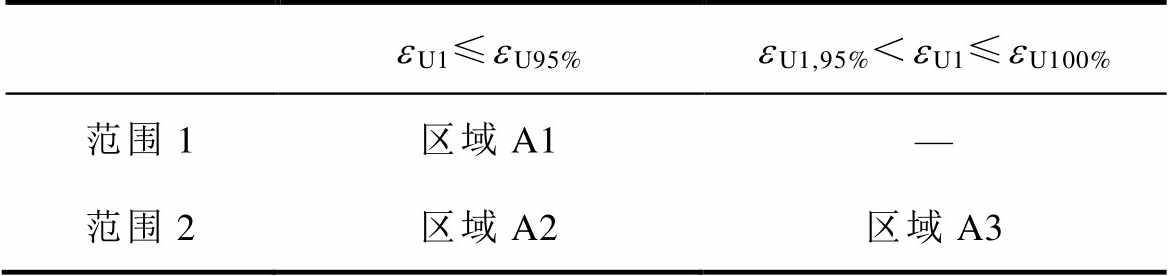
eU1≤eU95%eU1,95%<eU1≤eU100% 范围1区域A1— 范围2区域A2区域A3
(1)获取n个牵引变电所的总牵引负荷过程数据SL(t1), SL(t2),…,SL(tN0)以及三相电压不平衡度数据eU0(t1), eU0(t2),…,eU0(tN0),将三相电压不平衡度按照升序排列,得到该数据的95%概率大值eU0,95%= max95%{eU0(t1), eU0(t2),…, eU0(tN0)}与最大值eU0,100%= max{eU0(t1), eU0(t2),…,eU0(tN0)}。其中,由于电气化铁路负荷具有一定周期性,借助实测数据,或者计算机仿真技术等可获取负荷过程数据;max95%{ }表示求取一组数据的95%概率大值。
(2)评估eU0,95%与eU0,100%是否满足国标要求;若满足,则转至步骤(6);否则,执行步骤(3)。
(3)计算该策略下补偿模式Ⅰ的SΣ。确定补偿后eU1和的取值范围,确定补偿后牵引负荷有功分量和无功分量的三相电压不平衡度允许值eU1p和eU1q,以策略1下A1区域牵引负荷为例,根据式(28)得到负序约束条件为
 (36)
(36)式中,eU1p∈[0, eU1]。
根据式(30)得到无功约束条件为
 (37)
(37)根据式(36)求得满足条件的KN1和KN2,根据式(37)求得满足条件的KC1和KC2,根据式(35)计算不同取值下的SΣ。计算eU1和在不同的期望补偿值情形下的SΣ,其流程如图3所示,选择满足要求的SΣ最小值为最终值。同理,可以得到策略1下A2区域下的eU1和的期望补偿值。
(4)同理,分别计算该策略下补偿模式Ⅱ和Ⅲ的SΣ,确定方法同步骤(3)。
(5)选择该策略下SΣ取值较小的补偿模式为最终补偿方案。
(6)结束。
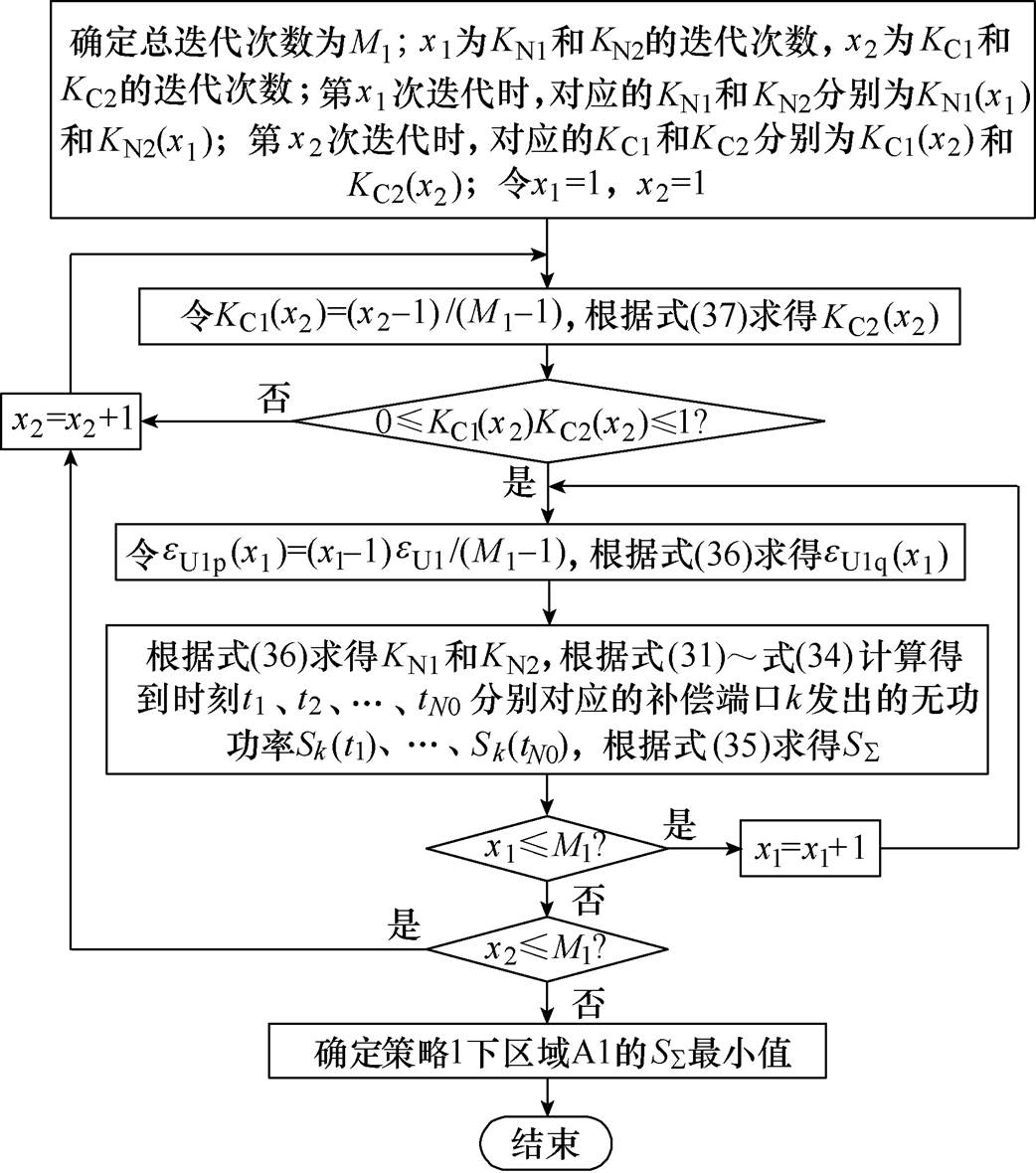
图3 不同期望补偿值下SΣ计算流程
Fig.3 Calculation process of SΣ under different expected compensation values
设定tx时刻CTS处牵引负荷端口电压瞬时值uL(tx)为
 (38)
(38)式中,w 为角频率。
tx时刻总牵引负荷电流瞬时值iL(tx)为
 (39)
(39)其中
式中, 为tx时刻谐波电流瞬时值;ILh和jLh分别为h(h≥2)次谐波电流有效值和相位。
为tx时刻谐波电流瞬时值;ILh和jLh分别为h(h≥2)次谐波电流有效值和相位。
式(39)两边分别乘以sin(wtx+p/6)得到瞬时功率pLp(tx)为
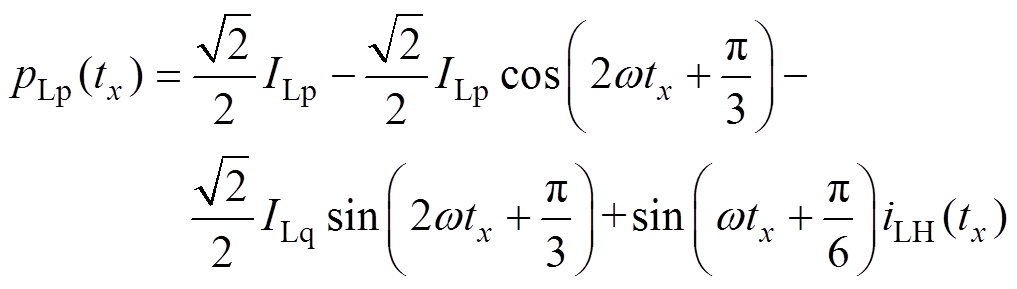 (40)
(40)根据式(40)得到pLp的直流成分 ,同理式(39)两边分别乘以cos(wtx+p/6)得到瞬时功率
,同理式(39)两边分别乘以cos(wtx+p/6)得到瞬时功率 的直流成分
的直流成分 ,进而求得式(11)~式(14)中的ILp和ILq的值。同理,可求得I1Lq的值。对于补偿端口k,通过锁相环(Phase Locked Loop, PLL)可确定补偿端口的同步信号为sin(wtx-yk),若为容性负荷,则对应的信号为sin(wtx-yk+p/2),若为感性负荷,则对应的信号为sin(wtx-yk-p/2),其中,yk为补偿端口k的端口电压滞后A相电压的角度。
,进而求得式(11)~式(14)中的ILp和ILq的值。同理,可求得I1Lq的值。对于补偿端口k,通过锁相环(Phase Locked Loop, PLL)可确定补偿端口的同步信号为sin(wtx-yk),若为容性负荷,则对应的信号为sin(wtx-yk+p/2),若为感性负荷,则对应的信号为sin(wtx-yk-p/2),其中,yk为补偿端口k的端口电压滞后A相电压的角度。
根据式(27)可知tx时刻CTS处的eU0(tx)为
 (41)
(41)SVG的工作状态可以分为待机状态和工作状态两类,其中,工作状态又分为发出容性无功功率状态和发出感性无功功率状态。
对于策略1,由第2节内容确定策略1下SVG的工作状态参考点为eU1,95%,存在以下两个工况:工况1,当eU0(tx)≤eU1,95%时,SVG处于待机状态;工况2,当eU0(tx)>eU1,95%时,SVG处于工作状态。
对于策略2,由第2节确定策略2下SVG的工作状态参考点为eU1,95%、eU0,95%和eU1,100%,存在以下四个工况:工况1,当eU0(tx)≤eU1,95%时,SVG处于待机状态;工况2,当eU1,95%<eU0(tx)≤eU0,95%时,SVG处于工作状态,eU1(tx)=eU1,95%;工况3,当eU0,95%<eU0(tx)≤eU1,100%时,SVG处于待机状态;工况4,当eU0(tx)>eU0,95%>eU1,95%且eU0(tx)>eU1,100%时,SVG处于工作状态,eU1(tx)=eU1,100%。
则时刻tx补偿端口k的补偿电流的期望值 ik(tx)为
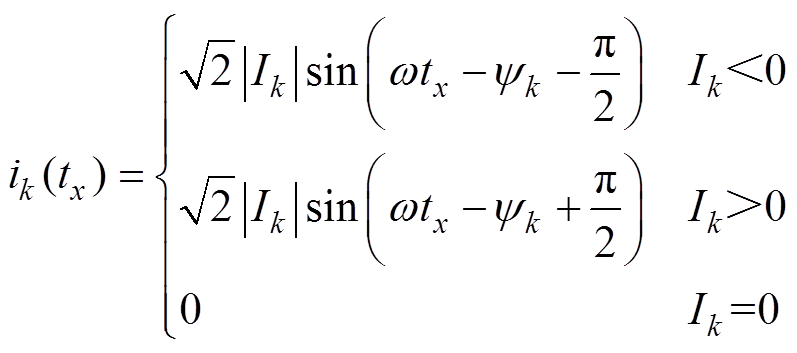 (42)
(42)根据相应的补偿端口电流以及工作状态切换策略,可确定不同补偿模式下的SVG控制原理框图,以补偿模式Ⅲ为例,其补偿电流检测框图及SVG1控制原理框图分别如图4a和图4b所示,利用三角波调制产生控制SVG的驱动信号[21-23],为达到稳压和保证响应速度的目的,采用电压和电流双闭环控制策略。
此外,通过设定KN1、KN2、KC1和KC2的取值得到补偿模式Ⅰ和Ⅱ的控制原理及策略框图。

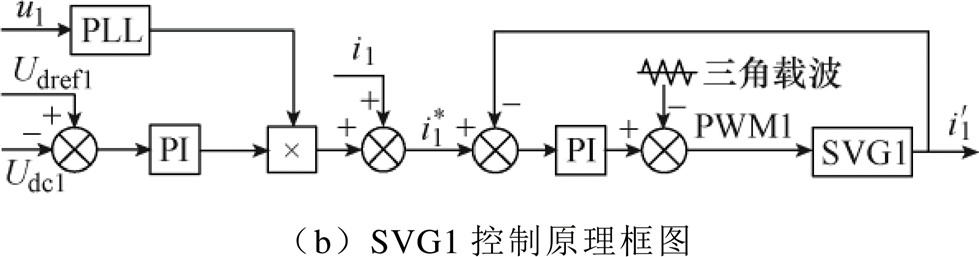
图4 补偿模式Ⅲ下的SVG控制原理框图
Fig.4 Block diagram of SVG control principle for compensation mode Ⅲ
为评估电气化线路双边供电情形下的均衡电流情况,课题组联合铁路相关单位对国内某初期开通线路符合牵引变电所群结构的两个牵引所进行了同步测量,电压等级为110kV,通过相量相加可获得PCC处的总牵引负荷,若PCC处短路容量按照800MV·A、功率因数按照0.95考虑,根据相关国标计算得到PCC处三相电压不平衡度如图5所示[17],最大值为3.02%,95%概率大值为1.73%。
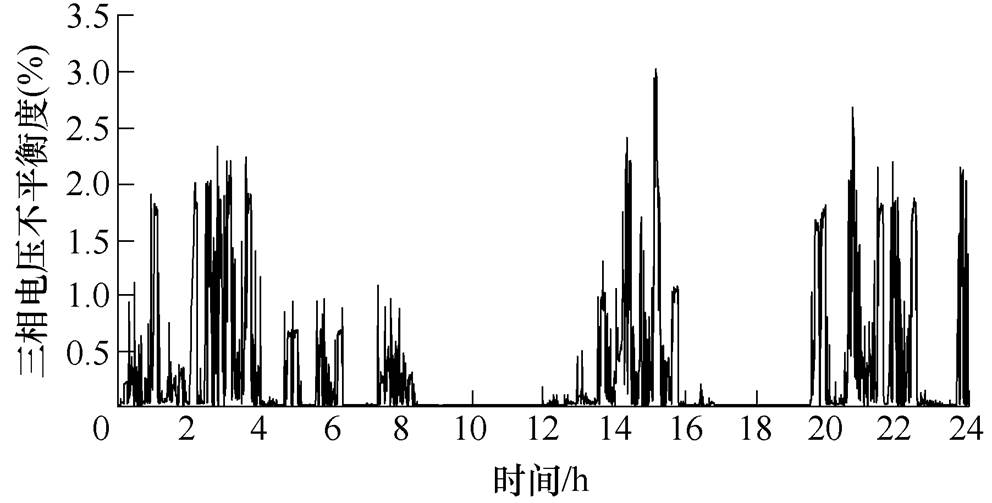
图5 补偿前PCC处三相电压不平衡度
Fig.5 The voltage unbalance degree at PCC without compensation
首先确定补偿后CTS处功率因数及PCC处三相电压不平衡度。本节分析中,设定如下:补偿后功率因数不变,此时KC=KC1=KC2=0;三相电压不平衡度满足国标要求,按照最大值不超过2.6%,95%概率大值不超过1.3%考虑[17]。下面分别确定补偿模式Ⅰ、Ⅱ和Ⅲ的最大无功功率补偿量。
(1)补偿模式Ⅰ
补偿模式Ⅰ下的两种补偿方式对应的95%概率大值和最大值见表2。对于区域A1+A2补偿后的三相电压不平衡度范围为[0.94%, 1.3%],对于区域A1+A3,补偿后三相电压不平衡度范围分别为[0.540%, 1.3%]和[0.943%, 2.60%]。其中,策略1下区域A2内的SVG1容量变化如图6所示。该案例下,方式2不满足国标的要求[17],故此时只考虑采用方式1。
表2 补偿模式Ⅰ下的三相电压不平衡度取值
Tab.2 Three phase voltage unbalance value under compensation mode Ⅰ(%)
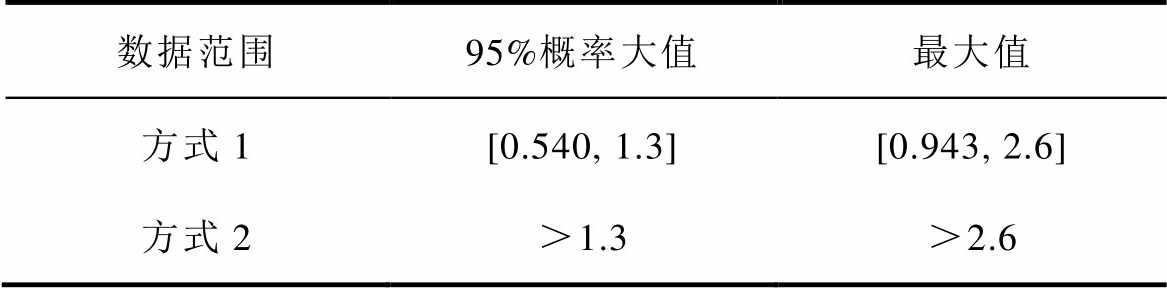
数据范围95%概率大值最大值 方式1[0.540, 1.3][0.943, 2.6] 方式2>1.3>2.6
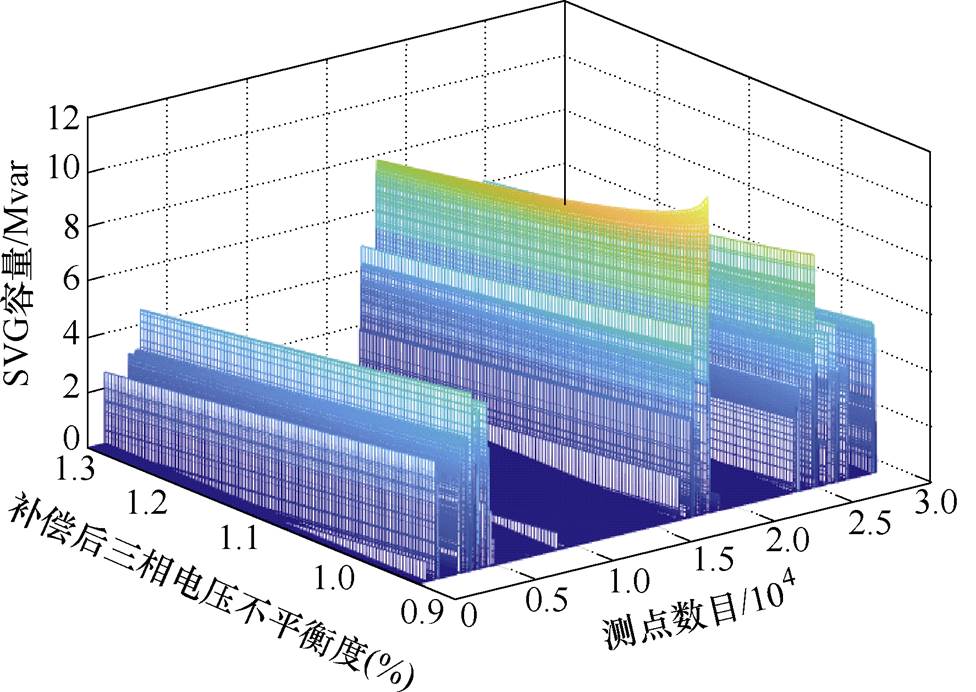
图6 补偿模式Ⅰ下SVG1容量
Fig.6 Capacity of SVG1 for compensation mode Ⅰ
根据第2节确定最大无功功率补偿量的步骤确定策略1下区域A1和A2的最大无功功率补偿量及策略2下的区域A1和A3的最大无功功率补偿量,如图7所示,策略1和策略2下的SVG的容量分别为15.784MV·A和3.676MV·A,显然策略2下的SVG容量较小。
(2)补偿模式Ⅱ
同理,确定补偿模式Ⅱ之方式1和方式2下策略1对应的区域A1和A2的最大无功功率补偿量及策略2下的区域A1和A3的最大无功功率补偿量,如图8a所示,对应的方式3和方式4如图8b所示。
补偿模式Ⅱ下对应的SVG最大无功功率补偿量统计结果见表3,其中,方式1和方式2的计算结果相同,方式3和方式4的计算结果相同,且偏大。方式1(或者方式2)下的策略2优先作为该模式下的补偿方案。
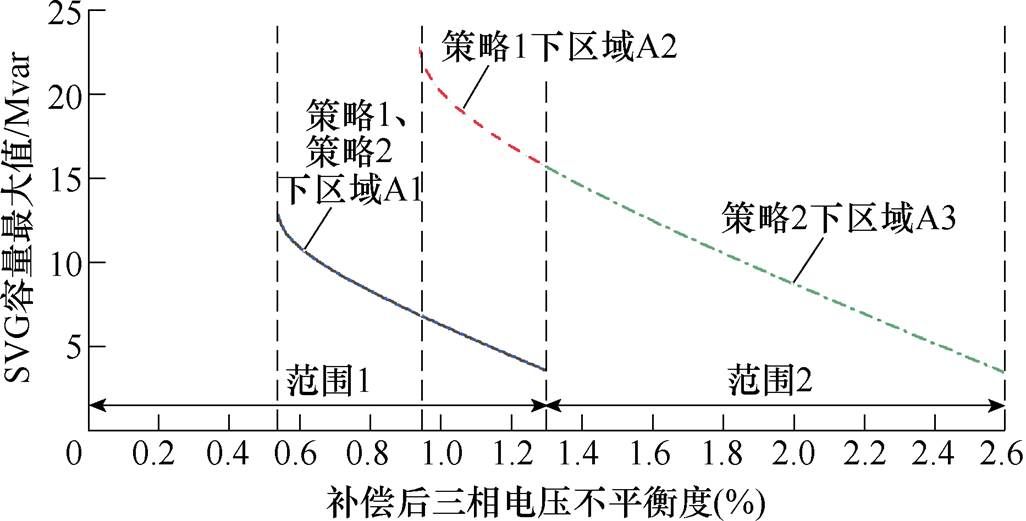
图7 补偿模式Ⅰ下SVG容量最大值
Fig.7 Maximum capacity of SVG in compensation mode Ⅰ
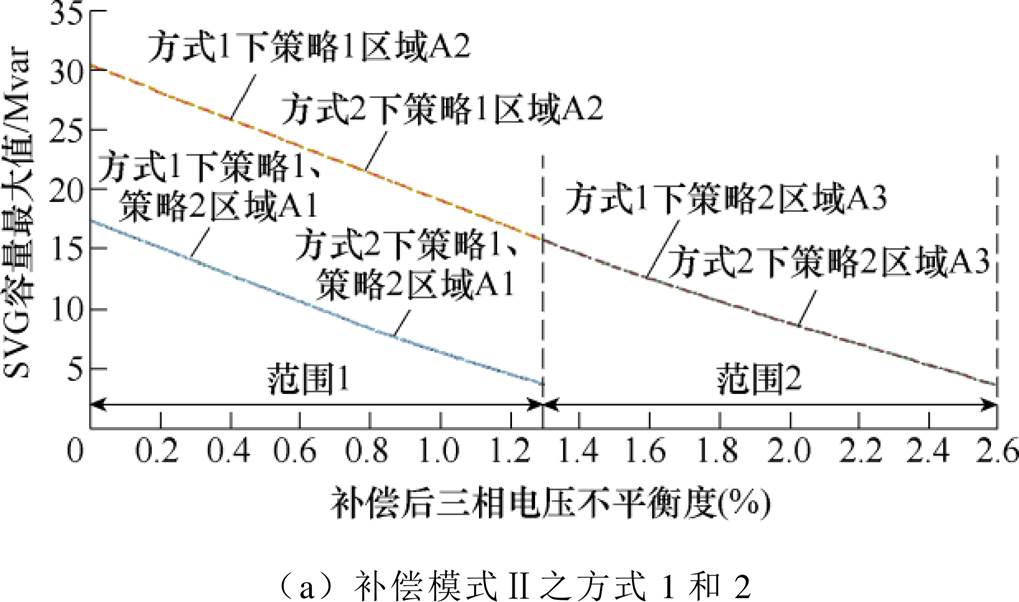
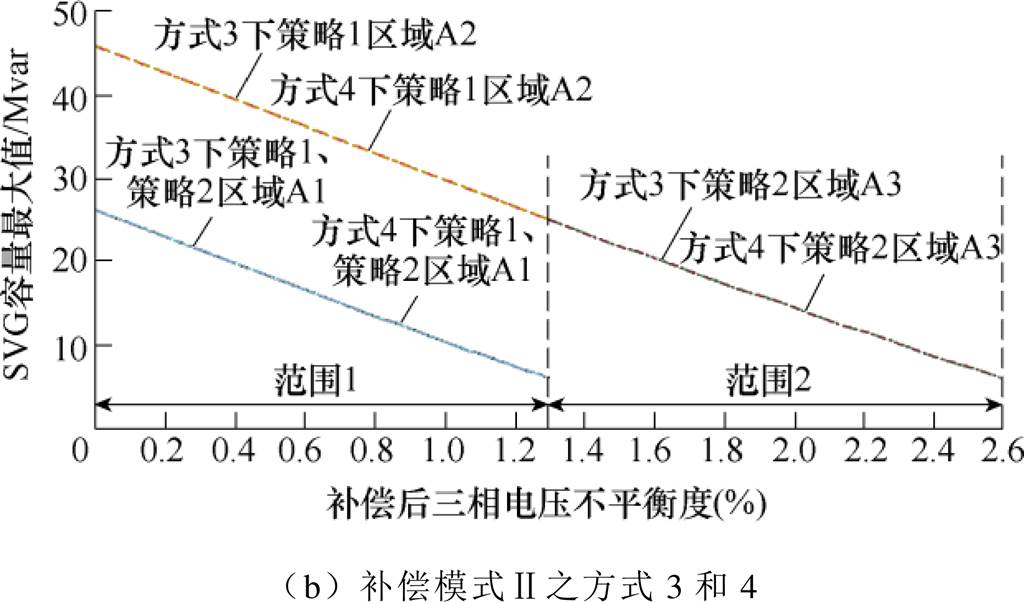
图8 补偿模式Ⅱ下SVG容量最大值
Fig.8 Maximum capacity of SVG in compensation mode Ⅱ
表3 补偿模式Ⅱ下SVG最大无功功率补偿量
Tab.3 Statistical value of relevant data of traction load ignoring traction load harmonics (单位: Mvar)
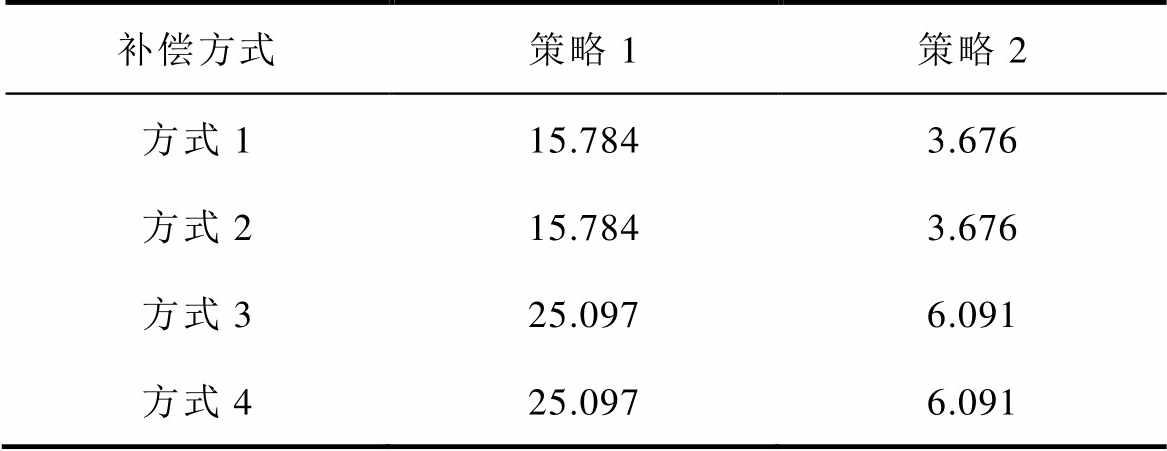
补偿方式策略1策略2 方式115.7843.676 方式215.7843.676 方式325.0976.091 方式425.0976.091
(3)补偿模式Ⅲ
同理,分别确定补偿模式Ⅲ下策略1区域A1和A2的最大无功功率补偿量及策略2下的区域A1和A3的最大无功功率补偿量,如图9所示。补偿模式Ⅲ下的策略1和策略2下的SVG装置容量最小值为15.784Mvar和3.676Mvar。
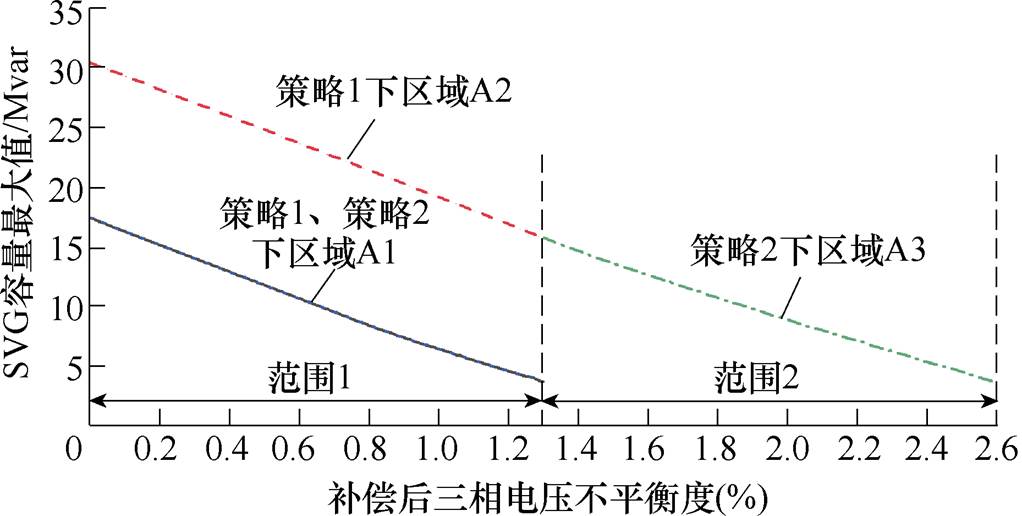
图9 补偿模式Ⅲ下SVG总容量
Fig.9 Total capacity of SVG for compensation mode Ⅲ
综上,确定补偿后满足eU1,95%=1.3%和eU1,100%= 2.6%的最大无功功率补偿量取值较小的情形,并考虑端口数目较少的情形,即此处考虑策略2下补偿模式Ⅰ下的方式1(或者方式2),补偿后的PCC处三相电压不平衡度如图10所示,在工况1和工况3区间SVG处于待机状态,在工况2和工况4区间,SVG处于工作状态,补偿后最大值为2.6%,95%概率值为1.3%。
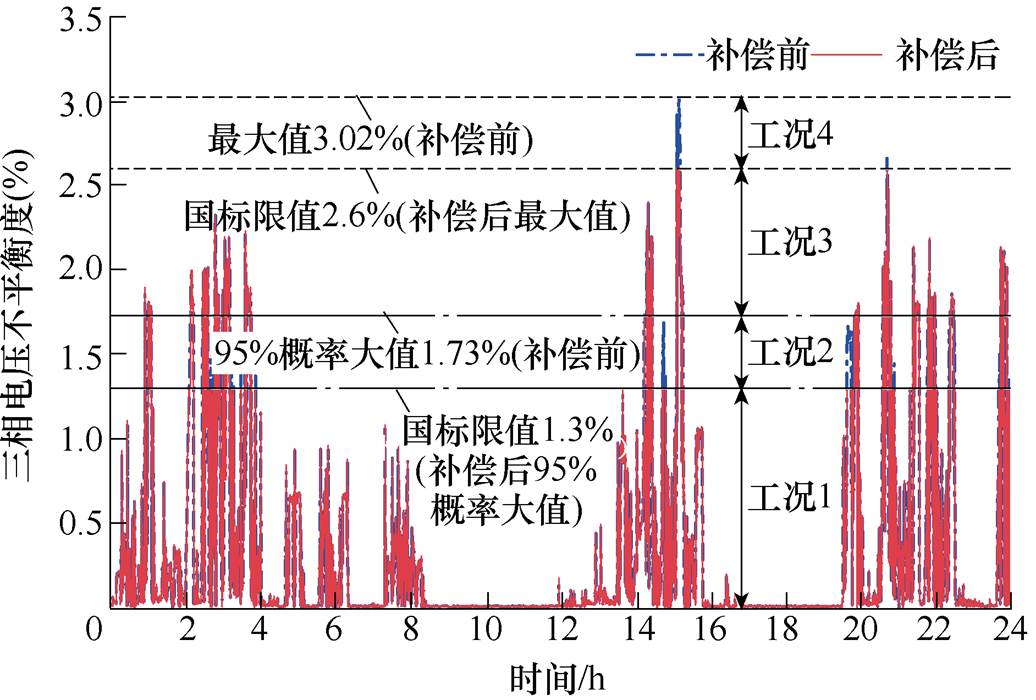
图10 补偿后的PCC处三相电压不平衡度
Fig.10 The voltage unbalance degree at PCC with compensation
以补偿模式Ⅰ和Ⅱ中的方式1为例,验证控制策略的正确性。PCC处短路容量为800MV·A,群内牵引变电所数目为2,依次为牵引变电所1和2,其中,牵引变电所1为CTS;牵引变压器电压比均为110kV/27.5kV。某段时间内,若两个牵引变电所的负荷功率分别为9.6MW和19.2MW,功率因数均为0.95。补偿前PCC正序和负序电压分别为62.29kV和2.36kV,三相电压不平衡度为3.79%。
(1)补偿模式Ⅰ之方式1
设定补偿后CTS处功率因数不变,eU1=1.3%,KN2=0,则根据式(28)计算得到KN1=0.85,PCC处三相电流仿真结果如图11a所示,进一步得到补偿后PCC处正序和负序电压分别为62.33kV和8.16kV,计算得到补偿后的三相电压不平衡度为1.31%;设定补偿后eU1=2.6%,KN2=0,则根据式(28)计算得到KN1=0.36,PCC处三相电流仿真结果如图11b所示,进一步得到正序和负序电压分别为62.30kV和1.64kV,计算得到补偿后的三相电压不平衡度为2.59%。

图11 补偿模式Ⅰ下的PCC处三相电流
Fig.11 Three-phase current with compensation at PCC with traction load harmonics
(2)补偿模式Ⅱ之方式1
设定补偿后CTS处功率因数不变,eU1=0%,此时KN1=1,KN2=1,PCC处三相电流仿真结果如图12a所示,进一步得到补偿后PCC处的正序和负序电压分别为62.50kV和0.24kV,计算得到三相电压不平衡度为0.38%。
设定补偿后CTS处功率因数不变,eU1=1.3%,根据第2节方法得到统计结果如图13a所示,获得最大无功功率补偿量对应的最小值时的KN1和KN2的取值为KN1=0.745和KN2=0.223,PCC处三相电流仿真结果如图12b所示,进一步得到补偿后PCC处的正序电压和负序电压分别为62.32kV和0.82kV,计算得到三相电压不平衡度为1.32%。

图12 补偿模式Ⅱ之方式1下的PCC处三相电流
Fig.12 Three-phase current at PCC under mode 1 of compensation mode Ⅱ
设定补偿后CTS处功率因数不变,eU1=2.6%,根据第2节方法得到统计结果如图13b所示,获得最大无功功率补偿量对应最小值时的KN1和KN2的取值为KN1=0.358和KN2=0,PCC处三相电流仿真结果如图12c所示,进一步得到补偿后PCC处的正序和负序电压分别为62.26kV和1.64kV,计算得到三相电压不平衡度为2.63%。

图13 补偿模式Ⅱ之方式1下统计结果
Fig.13 Statistical results under mode 1 of compensation mode Ⅱ
综上,上述结果达到预期期望值的补偿,说明了第3节中控制策略的正确性和有效性。
针对牵引变电所群贯通供电系统,从集中补偿的角度出发,提出基于一种新型牵引补偿变压器的负序补偿方案、控制策略和补偿方案的确定方法,得到如下结论:
1)将补偿模式分为Ⅰ、Ⅱ和Ⅲ,当牵引负荷功率因数为1时,采用补偿模式Ⅰ即可实现负序的部分补偿和全补偿;当牵引负荷功率因数不为1时,补偿模式Ⅰ补偿能力有限,补偿模式Ⅱ和Ⅲ均可实现负序的部分补偿和全补偿。
2)分析结果表明所提补偿方案确定方法的有效性,通过比选可以确定合适的补偿方案,达到降低SVG补偿容量的目的,进而降低投资成本。
3)为达到稳压和保证响应速度的目的,提出了适用于本文补偿方案的双闭环电压和电流控制策略,仿真结果说明了控制策略的正确性和有效性,能够实现负序的满意度补偿。
需要指出,本文所述方案也可用于单个牵引电所的同相供电的负序、谐波等治理,且其负序和谐波的补偿是独立的,因篇幅有限,此处不再详细 说明。
对于补偿模式Ⅱ之方式1,将式(15)~式(17)分别乘以对应补偿端口的端口电压 、和
、和 ,求得SVG发出的无功功率
,求得SVG发出的无功功率 、
、 和
和 分别为
分别为
 (A1)
(A1) (A2)
(A2)
 (A3)
(A3)
其中
SLq=SLsinjL
SLp=SLcosjL
对于补偿模式Ⅱ之方式2,将式(18)~式(20)分别乘以对应补偿端口的端口电压、和 ,求得SVG发出的无功功率
,求得SVG发出的无功功率 、
、 和
和 分别为
分别为
 (A4)
(A4) (A5)
(A5)
 (A6)
(A6)
对于补偿模式Ⅱ之方式3,将式(21)~式(23)分别乘以对应补偿端口的端口电压、和,求得SVG发出的无功功率 、
、 和
和 分别为
分别为
 (A7)
(A7) (A8)
(A8)
 (A9)
(A9)
对于补偿模式Ⅱ之方式4,将式(24)~式(26)分别乘以对应补偿端口的端口电压、和 ,求得SVG发出的无功功率
,求得SVG发出的无功功率 、
、 和
和 分别为
分别为
 (A10)
(A10) (A11)
(A11)
 (A12)
(A12)
参考文献
[1] 李群湛, 贺建闽. 牵引供电系统分析[M]. 成都: 西南交通大学出版社, 2012.
[2] 王辉, 李群湛, 李晋, 等. 基于YNd变压器与静止无功发生器的电气化铁路同相供电综合补偿方案[J]. 电工技术学报, 2020, 35(17): 3739-3749.
Wang Hui, Li Qunzhan, Li Jin, et al. Comprehensive compensation schemes of cophase power supply of electrified railway based on YNd transformer and static var generator[J]. Transactions of China Electro- technical Society, 2020, 35(17): 3739-3749.
[3] Gültekin B, Gerçek C O, Atalik T, et al. Design and implementation of a 154kV, ±50Mvar transmission statcom based on 21-level cascaded multilevel converter[C]//IEEE Energy Conversion Congress and Exposition, Atlanta, USA, 2010: 3936-3948.
[4] 沈曼盛, 周方圆. 国内外铁路牵引供电技术发展现状及趋势[J]. 电气化铁道, 2019, 30(1): 1-7, 12.
Shen Mansheng, Zhou Fangyuan. Development status and trend of traction power supply technology at home and abroad[J]. Electrified Railway, 2019, 30(1): 1-7, 12.
[5] Uzuka T, Ikedo S, Ueda K. A static voltage fluctu- ation compensator for AC electric railway[C]//IEEE 35th Annual Power Electronics Specialists Con- ference, Aachen, German, 2004: 1869-1873.
[6] 肖非然, 倪周, 闵永智, 等. 一种基于多智能体的多站协同高速铁路不平衡补偿方法[J]. 电工技术学报, 2020, 35(16): 3518-3528.
Xiao Feiran, Ni Zhou, Min Yongzhi, et al. Unbalanced compensation method of multi-station cooperative for high-speed railway based on multi- agent[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3518-3528.
[7] 王鹏程, 李勇, 安柏楠, 等. 基于不对称接线平衡变压器的电气化铁路电能质量混合调节系统[J]. 电工技术学报, 2019, 34(21): 4590-4600.
Wang Pengcheng, Li Yong, An Bonan, et al. Asym- metrical connection balance transformer based hybrid power quality control system for electrical railway[J]. Transactions of China Electrotechnical Society, 2019, 34(21): 4590-4600.
[8] 马茜, 郭昕, 罗培, 等. 基于超级电容储能的新型铁路功率调节器协调控制策略设计[J]. 电工技术学报, 2019, 34(4): 765-776.
Ma Qian, Guo Xin, Luo Pei, et al. Coordinated control strategy design of new type railway power regulator based on super capacitor energy storage[J]. Transactions of China Electrotechnical Society, 2019, 34(4): 765-776.
[9] 罗培, 杨维民, 周冠东, 等. 考虑供电臂电压波动的铁路功率调节器多目标优化设计[J]. 电工技术学报, 2018, 33(22): 5346-5356.
Luo Pei, Yang Weimin, Zou Guandong, et al. Multi- objective optimization design of railway static power conditioner considering voltage fluctuation of power supply arm[J]. Transactions of China Electro- technical Society, 2018, 33(22): 5346-5356.
[10] 李群湛, 张进思, 贺威俊. 适于重载电力牵引的新型供电系统的研究[J]. 铁道学报, 1988, 10(4): 23-31.
Li Qunzhan, Zhang Jinsi, He Weijun. Study of a new power supply system for heavy haul electric traction[J]. Journal of the China Railway Society, 1988, 10(4): 23-31.
[11] 李群湛. 我国高速铁路牵引供电发展的若干关键技术问题[J]. 铁道学报, 2010, 32(4): 119-124.
Li Qunzhan. On some technical key problems in the development of traction power supply system for high-speed railway in China[J]. Journal of the China Railway Society, 2010, 32(4): 119-124.
[12] 李群湛. 论新一代牵引供电系统及其关键技术[J]. 西南交通大学学报, 2014, 49(4): 559-568.
Li Qunzhan. On new generation traction power supply system and its key technologies for electri- fication railway[J]. Journal of Southwest Jiaotong University, 2014, 49(4): 559-568.
[13] 黄小红, 李群湛, 舒泽亮. 一种模块化级联H桥构造的三相—单相同相牵引供电系统[J]. 电机与控制学报, 2017, 21(10): 8-15.
Huang Xiaohong, Li Qunzhan, Shu Zeliang. Industrial frequency single-phase AC traction power supply system and its key technologies for urban rail transit[J]. Electric Machines and Control, 2017, 21(10): 8-15.
[14] 陈民武, 刘若飞, 陈玲, 等. 组合式同相供电系统补偿算法与控制策略优化[J]. 电机与控制学报, 2019, 23(8): 28-34, 42.
Chen Minwu, Liu Ruofei, Chen Ling, et al. Com- pensation algorithm and control strategy optimization of combined co-phase power supply system[J]. Electric Machines and Control, 2019, 23(8): 28-34, 42.
[15] 邓惠华, 李国良, 周晓明, 等. 基于协调控制SVG的低压配网三相负荷不平衡治理技术[J]. 电工技术学报, 2017, 32(增刊1): 75-83.
Deng Huihua, Li Guoliang, Zhou Xiaoming, et al. The control technology of three-phase unbalance load in low voltage distribution networks based on coordinated controlled SVGs[J]. Transactions of China Electrotechnical Society, 2017, 32(S1): 75-83.
[16] 翟灏, 卓放, 易皓, 等. 基于SVG的电网多节点电压不平衡综合抑制方法[J]. 电力系统自动化, 2017, 41(12): 40-47.
Zhai Hao, Zhuo Fang, Yi Hao, et al. SVG based comprehensive unbalance suppression method for multi-node voltage[J]. Automation of Electric Power System, 2017, 41(12): 40-47.
[17] 中国国家标准化管理委员会. GB/T 15543-2008 电能质量: 三相电压不平衡度[S]. 北京: 中国标准出版社, 2008.
[18] 李群湛. 一种补偿变压器[P]. 中国: CN201811061712.9, 2018-12-18.
[19] 孙旭东, 王善铭. 电机学[M]. 北京: 清华大学出版社, 2006.
[20] 张丽艳, 李群湛, 易东, 等. 同相供电系统潮流控制器容量的优化配置[J]. 电力系统自动化, 2013, 37(8): 59-64.
Zhang Liyan, Li Qunzhan, Yi Dong, et al. Capacity optimization of power flow controller used in a co- phase traction power supply system[J]. Automation of Electric Power System, 2013, 37(8): 59-64.
[21] 王兆安, 杨君, 刘进军, 等. 谐波抑制和无功功率补偿[M]. 2版. 北京: 机械工业出版社, 2005.
[22] 王辉, 李群湛, 解绍锋, 等. 基于Dd接线变压器及静止无功发生器的电气化铁路同相供电综合补偿方案[J]. 中国铁道科学, 2020, 41(4): 116-126.
Wang Hui, Li Qunzhan, Xie Shaofeng, et al. Com- prehensive compensation scheme of cophase power supply for electrified railway with Dd transformer and static var generator[J]. China Railway Science, 2020, 41(4): 116-126.
[23] 邱大强, 李群湛, 周福林, 等. 基于背靠背SVG的电气化铁路电能质量综合治理[J]. 电力自动化设备, 2010, 30(6): 36-39, 44.
Qiu Daqiang, Li Qunzhan, Zhou Fulin, et al. Comprehensive power quality control of electric railway based on back-to-back SVG[J]. Electric Power Automation Equipment, 2010, 30(6): 36-39, 44.
Compensation of Interconnected Power Supply System of Traction Substation Group Based on a New Type of Traction Compensation Transformer
Abstract Aiming at the negative sequence compensation problem of the interconnected power supply system of traction substation group, the scheme and control strategy for negative sequence compensation based on a new type of traction compensation transformer and static var generator are proposed. The topologies of the traction compensation transformer and the negative sequence compensation scheme are studied. The compensation scheme is divided into compensation modes Ⅰ, Ⅱ and Ⅲ according to the number of reactive power compensation units. From the perspective of the active and reactive components of traction load current, the constraint factors of negative sequence and reactive power are defined respectively, and the mathematical models of negative sequence and reactive power comprehensive compensation under different compensation modes are constructed based on the transformer magnetic potential balance equation, port connection equation and symmetrical component method. The maximum reactive power compensation is defined as the basis to determine the compensation scheme. The double closed-loop control strategy of voltage and current for negative sequence compensation scheme is proposed, and the correctness and effectiveness of the compensation scheme and control strategy are verified by simulation. Based on the measured data of traction substation, the determination method of compensation scheme is analyzed, and the results show that appropriate compensation scheme can reduce the capacity of compensation device.
keywords:Interconnected power supply system of traction substation group, negative sequence compensation, traction compensation transformer, static var generator, compensation mode
中图分类号:TM922.3; U223.6
DOI: 10.19595/j.cnki.1000-6753.tces.200280
国家自然科学基金(51877182)、中国国家铁路集团有限公司科技研究开发计划(SY2020G001)和四川省科技计划(2021YJ0028)资助项目。
收稿日期 2020-03-19
改稿日期 2020-09-28
王 辉 男,1989年生,博士研究生,研究方向为牵引供电系统理论、电能质量分析与控制。E-mail: wanghuiswjtu@163.com(通信作者)
李群湛 男,1967年生,教授,博士生导师,研究方向为牵引供电系统理论、电能质量分析与控制等。E-mail: 1qz3431@263.net
(编辑 崔文静)