图1 共直流母线型OW-PMSM的拓扑结构
Fig.1 Topology of the OW-PMSM with common DC bus
摘要 为了抑制共直流母线绕组开路永磁同步电机(OW-PMSM)控制系统中的零序电流并进一步提高电流质量,提出一种混合双矢量模型预测电流控制(MPCC)方法。首先,根据产生零序电压的大小将六个非零电压矢量进行分组;其次,利用参考电压矢量直接选择第一逆变器非零电压矢量与零矢量,并计算零矢量作用时间以实现对零序电流的控制;在此基础上,遴选第二逆变器的两个候选非零电压矢量并计算作用时间,从而实现对dq轴电流的跟踪。该方法中第一逆变器每个控制周期作用一个非零电压矢量与一个零矢量,第二个逆变器每个控制周期作用两个非零电压矢量,从而形成了混合双矢量方法。实验结果表明,提出的混合双矢量MPCC方法能够有效地抑制零序电流的产生,并减小电流脉动,提高了系统的稳态性能。
关键词:绕组开路永磁同步发电机 零序电流 模型预测电流控制
永磁同步电机已被广泛应用于汽车、轮船、航空航天等各个领域[1]。然而近年来,伴随着我国经济的快速发展和工业化水平的不断提高,对电机驱动系统容量和功率等级的要求也在不断提升。为了降低驱动系统耐压要求、提高系统的输出功率等级,绕组开路永磁同步电机(Open-Winding Permanent Magnet Synchronous Motor, OW-PMSM)系统受到广泛的关注[2]。这种拓扑结构在保留了传统永磁同步电机高功率密度优点的基础上,打开了电机的星形连接点,将引出的三相绕组接入第二个变换器,构成一种双变换器拓扑结构。这种拓扑结构可以实现多电平控制效果并提高系统的输出功率。因此,国内外针对绕组开路永磁同步电机系统的研究已经陆续从多方面展开[3-5]。
OW-PMSM系统根据不同的供电方式分为共直流母线和隔离直流母线两种拓扑结构。其中,隔离直流母线拓扑结构可以达到较好的多电平效果,但该结构需要两个独立电源供电,增加了整个控制系统的体积和成本。因此,本文针对共直流母线型拓扑结构展开研究。在共直流母线型结构中,绕组中性点的打开为零序电流提供了回路,导致系统能效降低并增加了转矩脉动[6]。因此,近年来对于零序电流的抑制问题是共直流母线绕组开路电机控制的研究热点[7-8]。
为了有效地抑制共直流母线绕组开路永磁同步电机的零序电流,文献[9]分析并阐述了零序电流产生的主要原因,即双变换器间的零序电压差与3次谐波反电动势。以此为基础,为了有效抑制零序电流,各国学者在矢量控制基础上,提出了一系列控制方法。文献[10, 17]提出了采用不产生零序电压的电压矢量组合方式进行调制的方法,即通过对两侧变换器均施加产生零序电压大小相等的电压矢量来抵消零序电压,实现对零序电流的抑制[11-12]。在此基础上,文献[13]增加了对3次谐波反电动势的考虑并设计了零序电流控制回路,通过比例积分控制器对两个零电压矢量(000)/(111)的作用时间进行补偿,实现了对零序电流的跟踪。文献[14]也提出通过补偿装置或提高额外的开关频率来抑制零序电流的方法。
目前,基于矢量控制框架来抑制零序电流的方法已取得了积极进展,但此类方法不仅使变换器存在较高的开关频率,而且增加了控制系统设计的复杂程度。然而,模型预测控制以其控制结构简单、动态响应快、设计理念直观的优势被广泛关注。同时,模型预测控制也已被引入绕组开路电机控制系统中。文献[15]针对零序电流抑制问题提出了一种模型预测控制方法,将零序电流加入价值函数中,使其与其他的控制目标共同选择出最优电压矢量,在一定程度上抑制了零序电流。但这种方法并未考虑零序分量的大小对候选电压矢量的影响。文献[16]提出一种三维空间矢量的概念,将零序电流作为新的控制对象转换到αβ0坐标系中,以此在整个三维空间内对电压矢量进行择优选择。然而,在考虑零序分量后,候选电压矢量的数目从19个增加至27个,这意味着需要在一个控制期内进行27次电压矢量择优选择,增加了整个控制系统的计算负荷和系统复杂程度。
为了既能有效地抑制零序电流,又能降低系统复杂程度,本文提出一种改进的绕组开路永磁同步电机模型预测电流控制方法。首先,将候选电压矢量按照其产生零序电压的大小进行分组,通过对两侧逆变器均采用同组候选电压矢量的方式有效限制了双逆变器间产生的零序电压,在分组过程中也简化了最优电压矢量的选择方法。在此基础上,在第一个逆变器中有效利用非零电压矢量与零矢量的组合对零序电流进行抑制;在第二个逆变器中施加两个非零电压矢量对dq轴电流进行跟踪。最终,实验结果证明了提出的混合双矢量模型预测电流控制(Model Predictive Current Control, MPCC)方法的有效性。
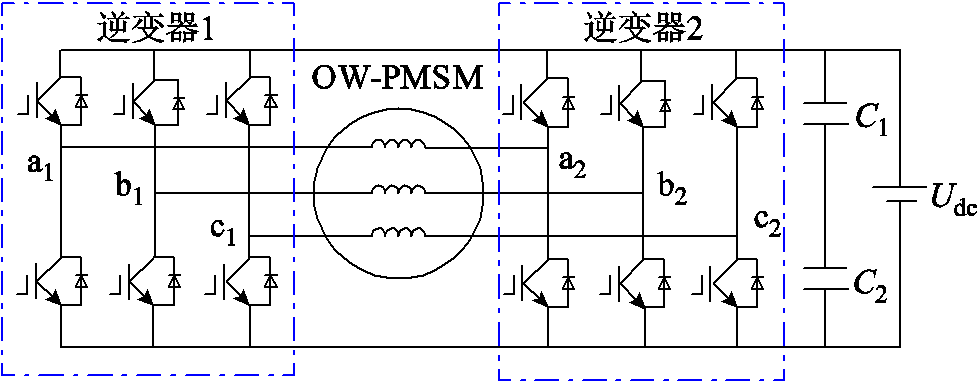
共直流母线OW-PMSM系统的拓扑结构如图1所示,其中包含两个三相电压源逆变器、一个OW-PMSM 和一个直流电源。
图1 共直流母线型OW-PMSM的拓扑结构
Fig.1 Topology of the OW-PMSM with common DC bus
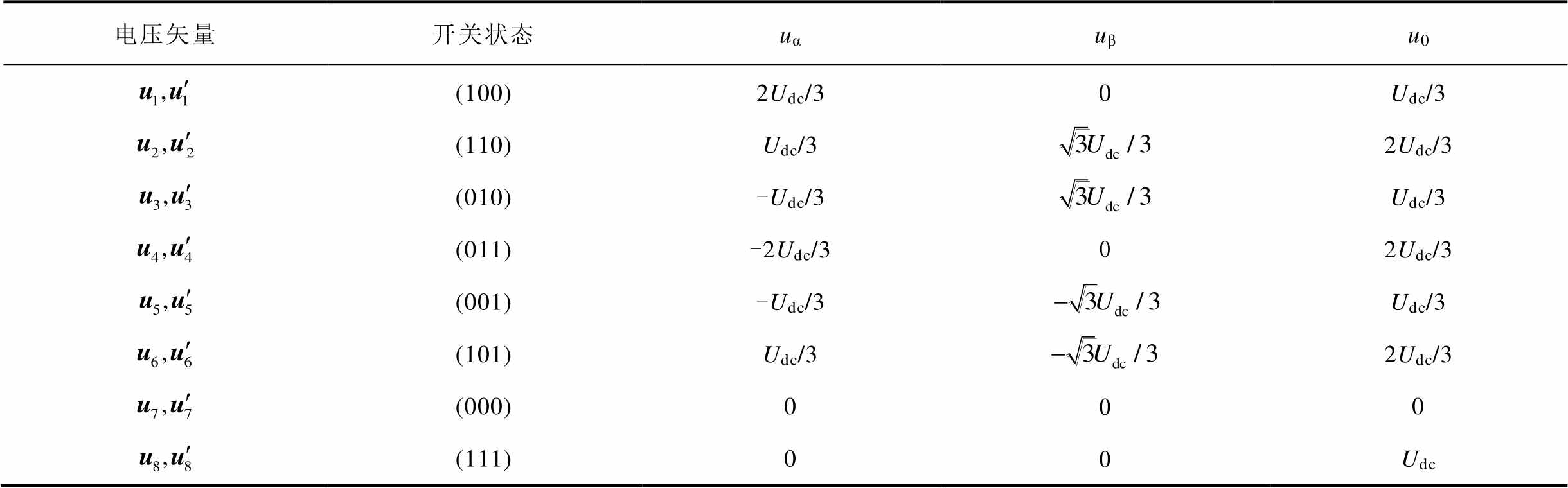
OW-PMSM系统由双逆变器供电,每个逆变器可产生8个不同的电压矢量,具体矢量分布如图2所示。逆变器开关状态与电压矢量的关系见表1。根据表1可以看出,8种电压矢量产生4种不同的零序电压。因此,根据零序电压的不同可将这8种电压矢量划分为u0=0、u0=Udc/3、u0=2Udc/3和u0=Udc这四类。
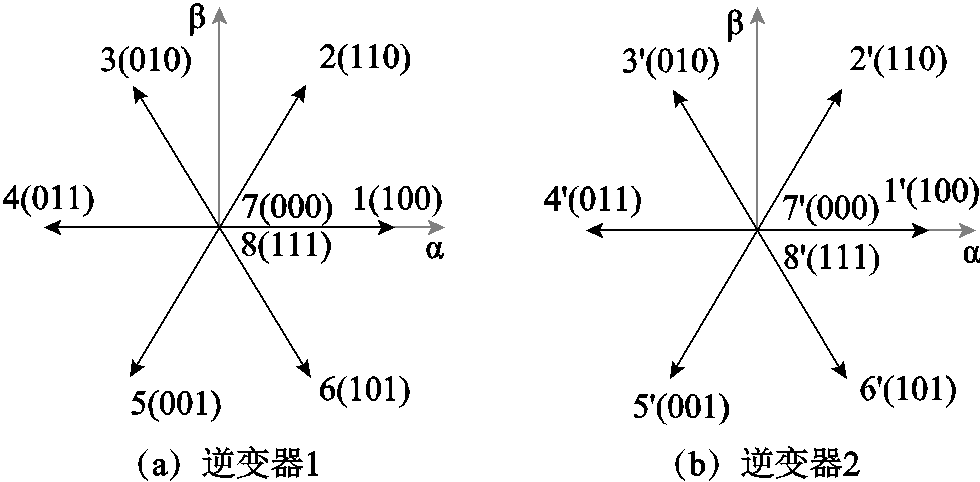
图2 两侧逆变器的电压矢量
Fig.2 Voltage vectors of each inverter
表1 逆变器开关状态与电压矢量的关系
Tab.1 The relationship between inverter switching state and voltage vector
电压矢量开关状态uαuβu0 (100)2Udc/30Udc/3 (110)Udc/32Udc/3 (010)-Udc/3Udc/3 (011)-2Udc/302Udc/3 (001)-Udc/3Udc/3 (101)Udc/32Udc/3 (000)000 (111)00Udc
而对于具有双逆变器结构的开绕组电机而言,其合成电压矢量是由两个逆变器共同决定的,具体表达式为
 (1)
(1) 式中,uαβ0为在αβ0坐标系内作用于OW-PMSM上的定子电压;uαβ0-1和uαβ0-2分别为逆变器1(INV1)和逆变器2(INV2)产生的电压。因此,开绕组电机系统可以合成更多的电压矢量,形成三电平逆变器的控制效果,具体电压矢量分布如图3所示。
图4所示为常规的模型预测电流控制框图,主要包括以下三个部分:OW-PMSM的离散化数学模型、一拍延迟补偿和价值函数最小化。
由于共直流母线型OW-PMSM系统存在零序通路,导致系统中不可避免地存在零序电流。因此,在OW-PMSM的数学建模过程中不能忽略零序分量对系统的影响。此外,本文电机为表贴式电机,在同步旋转坐标系中dq轴等效电感相同,即Ld=Lq=L。因此,在同步旋转参考系(dq0坐标系)下OW-PMSM的数学模型为
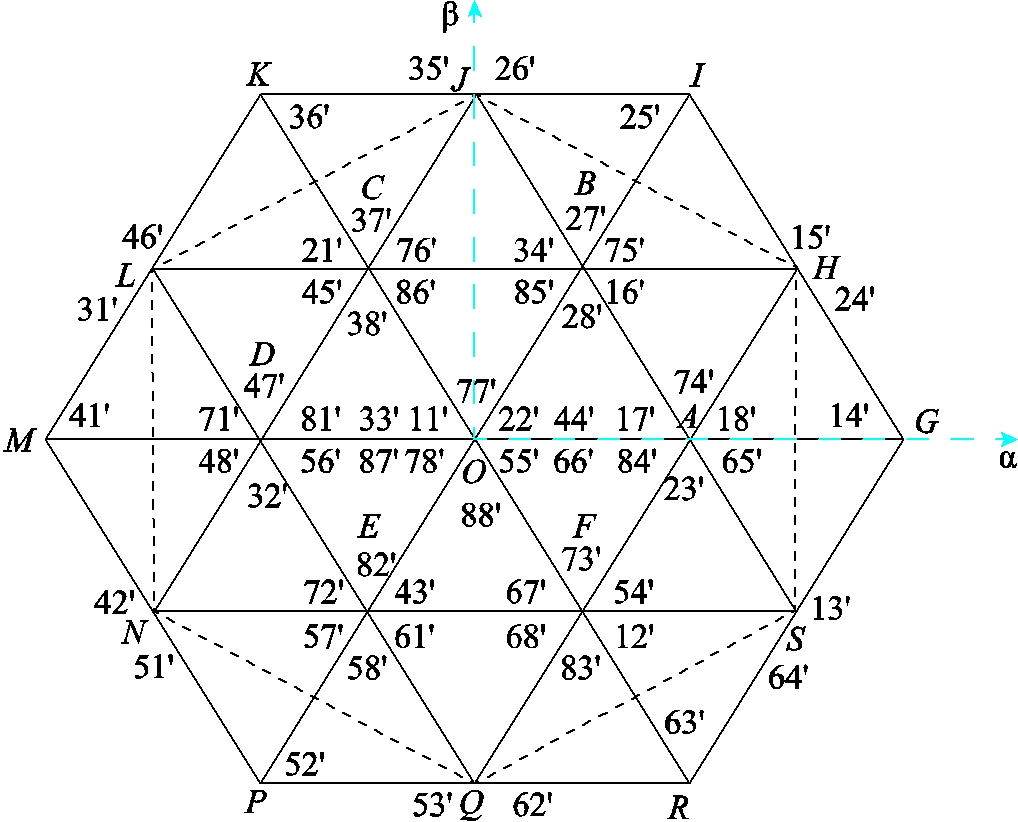
图3 双逆变器电压矢量的分布
Fig.3 Voltage vector distribution of dual inverter
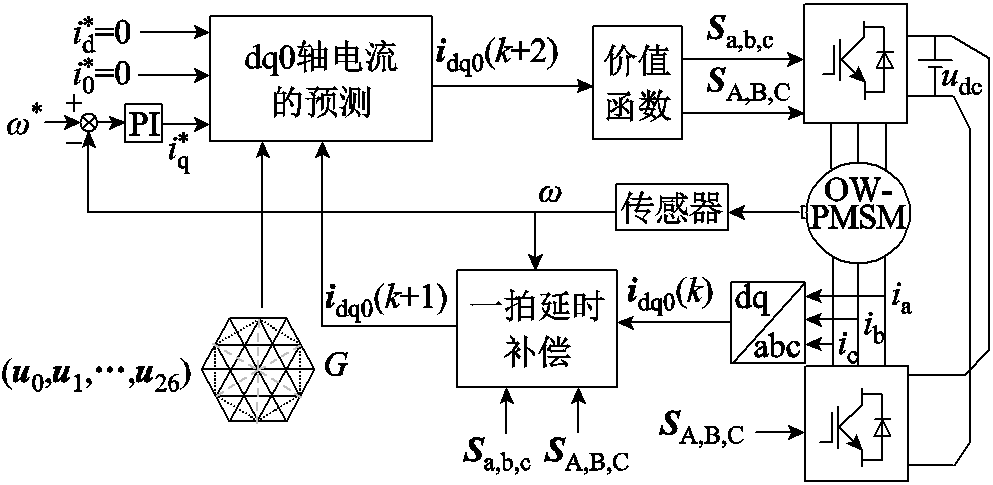
图4 共直流母线OW-PMSM下MPCC控制框图
Fig.4 The control diagram of MPCC method under OW-PMSM with common DC bus
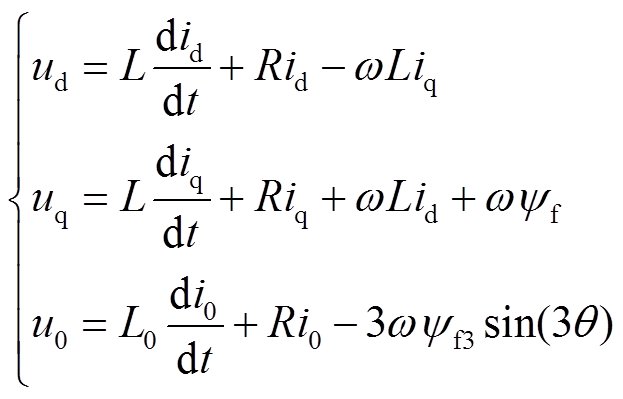 (2)
(2)式中,ud、uq、u0和id、iq、i0分别代表dq0坐标系下的d轴、q轴、0轴电压和电流分量;R、L、L0分别为定子电阻、电感、零序电感;ω、θ、 、
、 分别为电角速度、电机转子位置、永磁磁链和永磁磁链的3次谐波分量。
分别为电角速度、电机转子位置、永磁磁链和永磁磁链的3次谐波分量。
根据式(2)可以看出,零序电流的产生是由两个逆变器间的零序电压差和OW-PMSM的3次谐波反电动势产生的,零序电流等效电路如图5所示。在图5中,通过u01和u02表示两个逆变器产生的零序电压分量。e0表示OW-PMSM的3次谐波零序反电动势,e0=3ωsin(3θ)。

图5 共直流母线OW-PMSM的零序等效电路
Fig.5 The zero-sequence equivalent circuit of OW-PMSM with common DC bus
此外,为实现对电流的预测,采用梯形积分法对式(2)进行离散化处理,可以得到预测电流方程为
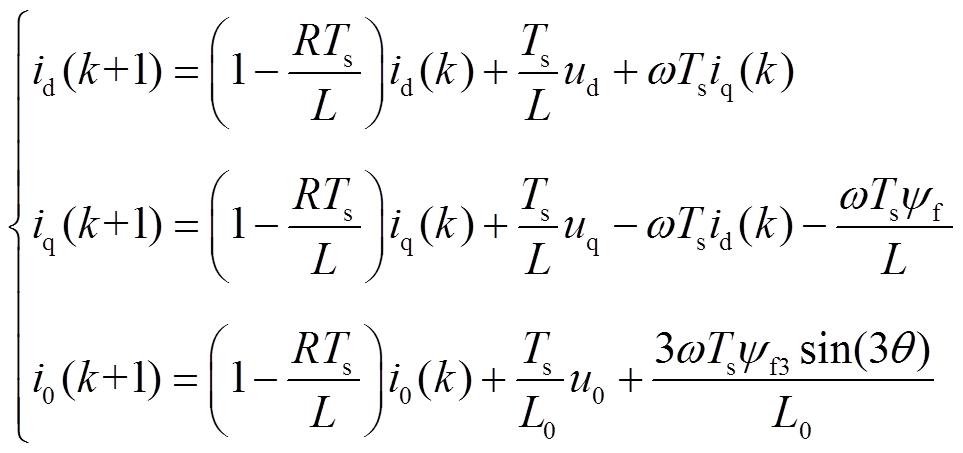 (3)
(3)值得注意的是,在实际应用中,数字电路在实现中存在一拍的延迟会影响系统的控制性能,尤其是对于开关频率较低的系统而言。为了有效地减少一拍延迟对系统控制性能的影响,通常采用一步预测方法对系统进行补偿[15]。因此,可根据式(3)中的电机离散化模型,预测得到k+1时刻的电流值取代采样电流实现一拍延时补偿。
传统MPCC控制方法的主要控制目标是d轴与q轴电流。然而,共直流母线拓扑OW-PMSM系统中存在零序电流通路,为了抑制该零序电流,需在价值函数中加入零序电流误差项,从而将d、q轴电流与零序电流进行协同控制。具体价值函数表达式为
 (4)
(4)式中,id(k+2)、iq(k+2)与i0(k+2) 为一拍延时补偿后的预测电流,其预测值为
 (5)
(5)式中, ,
, 。
。
因此,基于价值函数最小的原则可选择出下一控制周期施加的最优的电压矢量,即
 (6)
(6)常规模型预测控制策略仅限制了双逆变器间的零序电压,并未考虑OW-PMSM中3次谐波反电动势对零序电流的影响。并且一个控制周期作用一个电压矢量影响了系统控制精度。
为了在不增加计算负荷的同时,提升常规模型预测控制方法的电流质量,本文提出一种混合双矢量MPCC方法,其控制框图如图6所示。该方法中,第一逆变器为非零电压矢量与零矢量的组合;第二逆变器为两个非零电压矢量的组合。并且两个逆变器的非零电压矢量具有相同的零序电压。
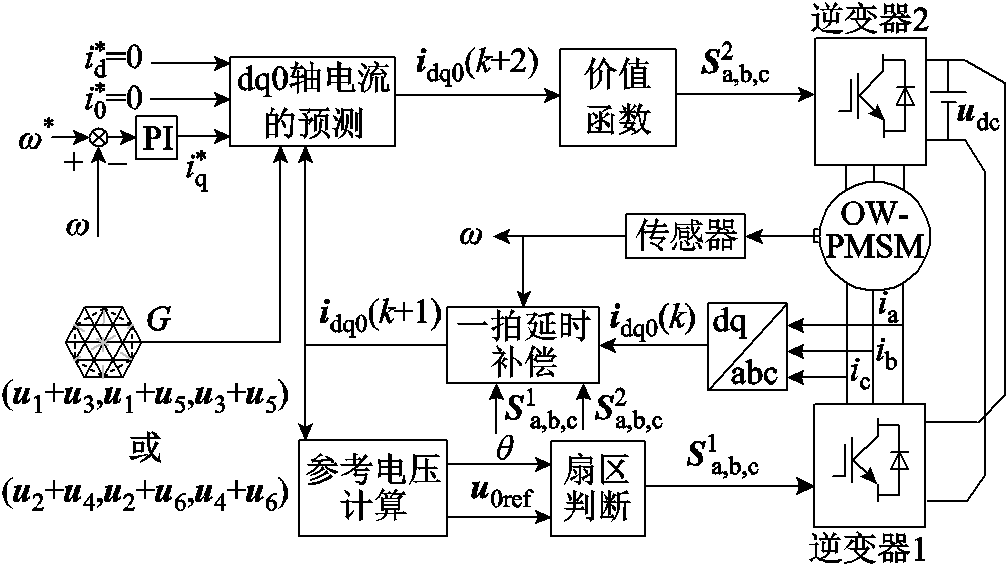
图6 共直流母线OW-PMSM下混合双矢量MPCC控制框图
Fig.6 The control diagram of hybrid double vector MPCC method under OW-PMSM with common DC bus
为了有效地抑制零序电流的产生,控制双逆变器之间产生的零序电压相互抵消是一种有效途径。因此,本文基于双逆变器间的电压关系式(2),通过对两侧逆变器施加具有相同零序电压的非零电压矢量,同时在第一逆变器中补偿零矢量来抑制零序电流的产生。
首先,根据产生的零序电压大小将单个逆变器的电压矢量进行分组。根据表1中逆变器电压矢量所产生零序电压的大小将非零电压矢量分为两组,一组为产生零序电压大小为u0=Udc/3的矢量,一组为产生零序电压大小为u0=2Udc/3的矢量。这两组矢量具体分布如图7所示,每一组包括互差2π/3的三个非零电压矢量。
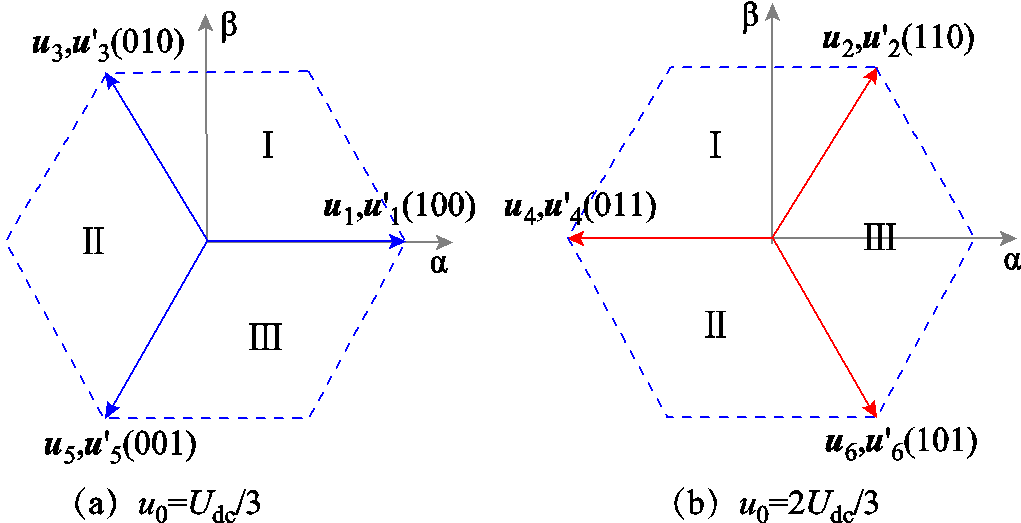
图7 零序电压相同的两组非零电压矢量
Fig.7 The two groups of non-zero voltage vectors with the same zero-sequence voltage
为了确定将哪一组电压矢量作为候选电压矢量,基于无差拍控制原理( )对整个系统的参考电压矢量进行计算,可得
)对整个系统的参考电压矢量进行计算,可得
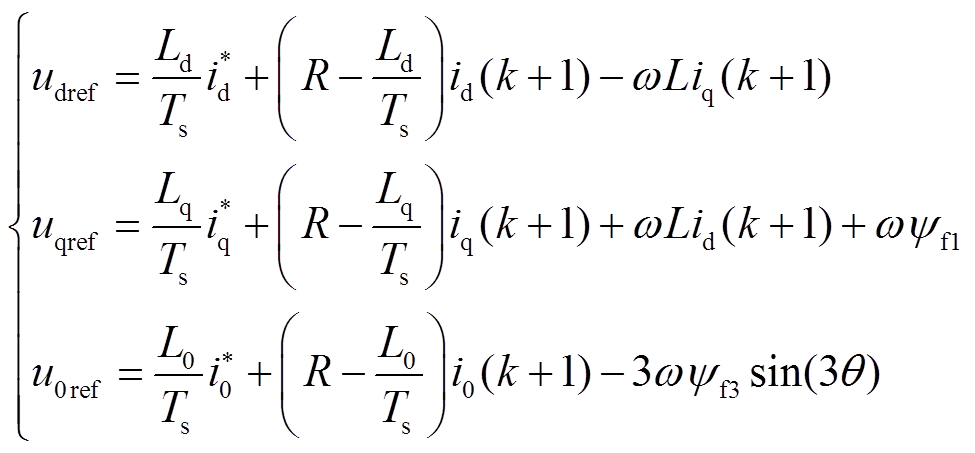 (7)
(7)式中,udref、uqref与u0ref分别代表在两相旋转坐标系(dq0)下d、q、0轴的参考电压分量,对其进行Clarke变换可以得到在αβ平面内系统的参考电压矢量uαref、uβref为
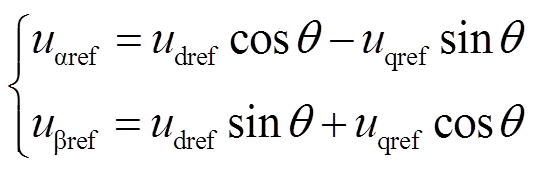 (8)
(8)进一步,可得到参考电压矢量uαref、uβref在αβ平面内的相角(即参考电压的位置角θ)为
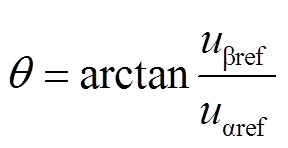 (9)
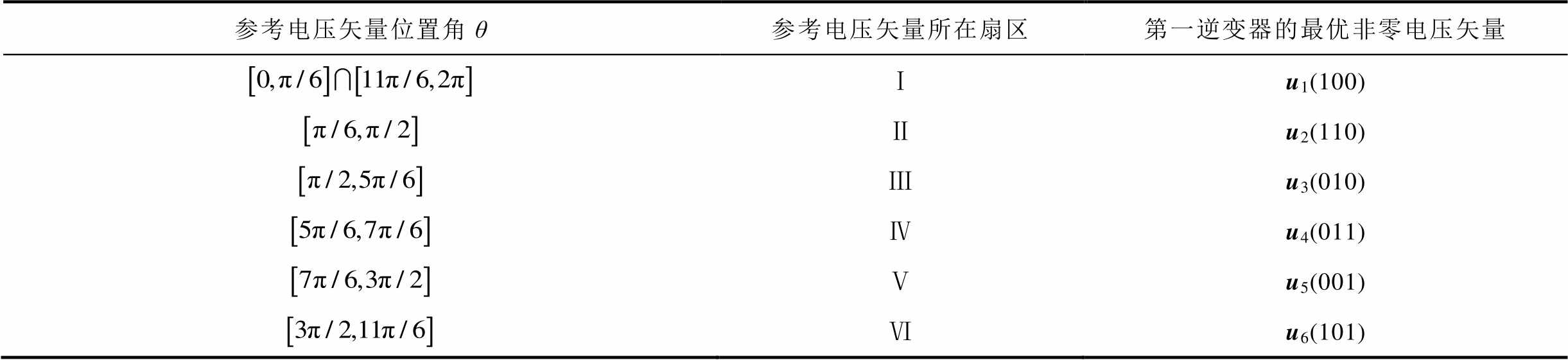
(9)为了更快速地确定候选电压矢量,将整个双逆变器电压矢量分布平面分为6个扇区(即Ⅰ, Ⅱ, ,Ⅵ),如图8a所示。在此基础上,根据参考电压矢量的位置角θ和扇区分布,选择参考电压矢量所在扇区内的非零电压矢量作为第一逆变器的最优非零电压矢量。以图8中所示的参考电压矢量位置为例,根据其位置角θ可知参考电压矢量uref落在第一扇区内,因此,将电压矢量u1(OA)选择为第一逆变器的最优非零电压矢量。当参考电压矢量位于不同扇区时,扇区位置与第一逆变器最优非零电压矢量之间的关系如图8b和表2。
,Ⅵ),如图8a所示。在此基础上,根据参考电压矢量的位置角θ和扇区分布,选择参考电压矢量所在扇区内的非零电压矢量作为第一逆变器的最优非零电压矢量。以图8中所示的参考电压矢量位置为例,根据其位置角θ可知参考电压矢量uref落在第一扇区内,因此,将电压矢量u1(OA)选择为第一逆变器的最优非零电压矢量。当参考电压矢量位于不同扇区时,扇区位置与第一逆变器最优非零电压矢量之间的关系如图8b和表2。

图8 电压矢量的扇区分布
Fig.8 The sector distribution of voltage vector
表2 参考电压位置角与第一逆变器最优非零电压矢量之间的关系
Tab.2 The relationship between the position angle and the voltage vector of the first inverter
参考电压矢量位置角θ参考电压矢量所在扇区第一逆变器的最优非零电压矢量 Ⅰu1(100) Ⅱu2(110) Ⅲu3(010) Ⅳu4(011) Ⅴu5(001) Ⅵu6(101)
在确定了第一逆变器的最优非零电压矢量后,为了有效地控制双逆变器间的零序电压差,第二逆变器应该选择与第一逆变器最优电压矢量具有相同零序电压的矢量作为候选电压矢量。如当第一逆变器选择了零序电压u0=Udc/3的电压矢量u1(100)作为最优非零电压矢量,第二逆变器的候选电压矢量将在产生零序电压u0=Udc/3的这一组电压矢量中进行选择,即 、
、 、
、 ;当第一逆变器选择了零序电压u0=2Udc/3的电压矢量u2(110)作为最优非零电压矢量,第二逆变器的候选电压矢量将在产生零序电压u0=2Udc/3的这一组电压矢量中进行选择,即
;当第一逆变器选择了零序电压u0=2Udc/3的电压矢量u2(110)作为最优非零电压矢量,第二逆变器的候选电压矢量将在产生零序电压u0=2Udc/3的这一组电压矢量中进行选择,即 、
、 、
、 ,具体情况见表3。
,具体情况见表3。
基于参考电压矢量方程式(8)可获得零序参考电压矢量u0ref的幅值,虽然两逆变器选择具有相同零序电压的非零电压矢量可使两个逆变器共同作用不产生零序电压,但由于3次谐波反电动势的存在,使零序参考电压u0ref不为零。因此,为了使实际零序电压u0能够跟踪参考零序电压u0ref,需补偿零电压矢量。
表3 第一逆变器最优矢量与第二逆变器候选电压矢量间关系
Tab.3 The relationship between optimal voltage vectors of the first inverter and the candidate voltage vectors of second inverter

第一逆变器最优非零电压矢量第二逆变器的候选电压矢量 u1(100), u3(010), u5(001) u2(110), u4(011), u6(101)
当u0ref>0时,鉴于第二逆变器候选矢量与第一逆变器已选的非零电压矢量具有相同的零序电压,为了使逆变器1(INV1)和逆变器2(INV2)通过合成电压式(1)产生的零序电压u0>0,在已选择的第一逆变器非零电压矢量基础上,需加入零矢量u8(产生的零序电压为Udc),再通过调节零矢量u8在第一逆变器中的作用时间从而实现对零序参考电压u0ref的跟踪。
当u0ref<0时,为了使逆变器1(INV1)和逆变器2(INV2)通过合成电压式(1)产生的零序电压u0<0零,在已选择的第一逆变器非零电压矢量基础上,需加入零矢量u7(产生的零序电压为0),再通过调节零矢量u7在第一逆变器中的作用时间可以实现跟踪零序参考电压u0ref的目的,从而有效抑制零序电流。
而第一逆变器中零矢量的作用时间可根据零序参考电压矢量大小与不同补偿方式下的系统零序电压大小获得,具体公式为
 (10)
(10)式中,u0INV1为第一逆变器的零序电压值;u0INV2第二逆变器的零序电压值。
在确定第一逆变器作用的电压矢量与第二逆变器的候选电压矢量后,设计如式(11)所示的价值函数对第二逆变器所需的两个非零矢量进行选择。值得注意的是,由于本方法通过对第一个逆变器中的零电压矢量进行调节从而控制零序电流,因此在价值函数中可以省略对零序电流的考虑,在控制目标设计中,只考虑对d轴和q轴电流分量的追踪即可。
 (11)
(11)第一逆变器直接作用已选择的一个非零电压矢量与一个零矢量,而第二逆变器则在一个控制周期内作用两个非零电压矢量。因此,就形成了一种混合双矢量控制方法,即一个逆变器的双矢量由非零矢量与零矢量构成,另一个逆变器的双矢量由两个非零矢量构成。
而为了选择第二个逆变器的两个非零矢量,需基于电流无差拍控制原理,构建q轴电流方程式为[19]
 (12)
(12)式中,s0为零电压矢量引起的q轴电流的斜率变化,(即 ;si和sj分别为双逆变器的两组候选电压矢量引起的q轴电流的斜率变化(即dis/dt);ti为第一组候选电压矢量(即,第一逆变器已选最优非零矢量和一个第二逆变器候选矢量)的作用时间;Ts为整个控制周期;Ts-ti为第二组候选电压矢量(即,第一逆变器已选最优非零矢量和另一个第二逆变器候选矢量)的作用时间。
;si和sj分别为双逆变器的两组候选电压矢量引起的q轴电流的斜率变化(即dis/dt);ti为第一组候选电压矢量(即,第一逆变器已选最优非零矢量和一个第二逆变器候选矢量)的作用时间;Ts为整个控制周期;Ts-ti为第二组候选电压矢量(即,第一逆变器已选最优非零矢量和另一个第二逆变器候选矢量)的作用时间。
基于式(12),可推导得到第一组候选电压矢量的作用时间为
 (13)
(13)进一步,根据式(10)和式(13)所示电压矢量作用时间,可得到电流的预测方程为
最后,根据式(14)计算可得到三组候选电压矢量的电流预测值,分别代入价值函数式(11)中,基于价值函数最小的原则选择一组最优的电压矢量,并按照矢量作用时间分别作用两侧逆变器。此方法每个控制周期Ts只需通过价值函数比较3次候选电压矢量,优化了矢量选择,降低了计算量。
为了验证所提出的OW-PMSM混合双矢量MPCC方法的可行性和有效性,本文分别对常规的MPCC方法与提出的混合双矢量MPCC方法进行了实验验证。在研究中将一组对托式电机作为本实验研究对象,并基于TI数字处理器TMS320F28335搭建了硬件控制平台。其中一边电机为本文研究的OW-PMSM电机,另一边为负载电机,OW-PMSM控制模块用于算法实现,负载控制模块用于实现加载,如图9所示。系统采样频率设为15kHz。OW-PMSM实验平台的参数见表4。

图9 OW-PMSM系统实验平台
Fig.9 The experiment platform of OW-PMSM system
表4 OW-PMSM系统实验参数
Tab.4 The experimental parameters of OW-PMSM system
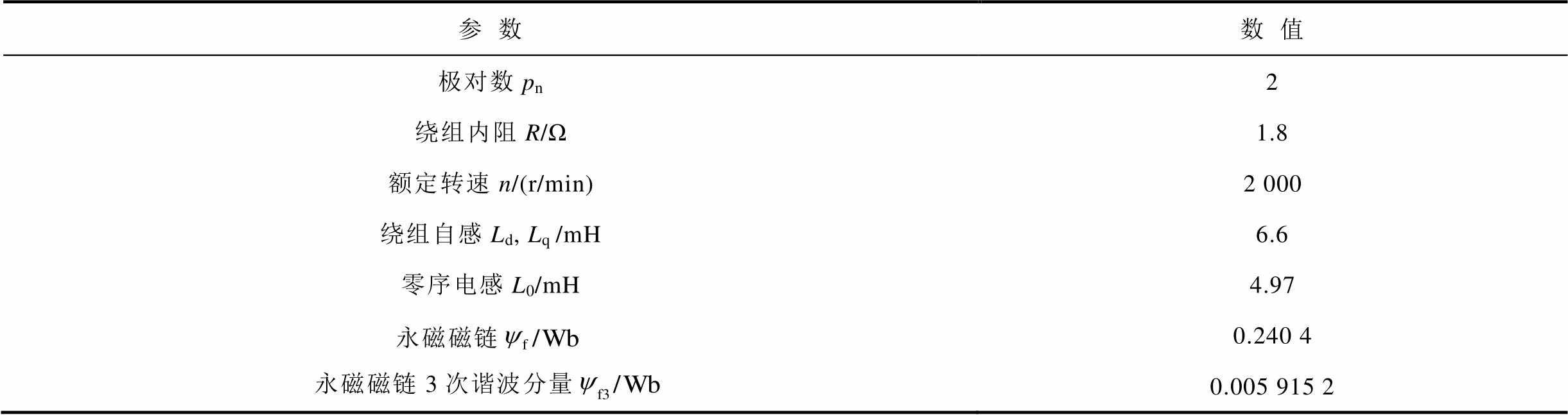
参数数值 极对数pn2 绕组内阻R/Ω1.8 额定转速n/(r/min)2 000 绕组自感Ld, Lq /mH6.6 零序电感L0/mH4.97 永磁磁链0.240 4 永磁磁链3次谐波分量0.005 915 2
为了评估提出方法的稳态性能,本文分别对两种方法在不同转速工况情况下进行了实验对比(即低速500r/min、中速1 000r/min、额定2 000r/min三种工况)。图10~图12为两种方法在4N×m负载下不同速度工况下的稳态性能结果对比。对比图10a与图10b可知,混合双矢量MPCC相比传统MPCC在低速工况下,dq轴电流的脉动得到明显改善,零序电流脉动Di0从1.6A降低到0.6A,绕组相电流的总谐波畸变率(Total Harmonic Distortion, THD)从16.50%降低到8.14%。
对比图11a与图11b可知,在中速工况下,混合双矢量MPCC相比传统MPCC,dq轴电流的脉动得到明显改善,零序电流脉动Di0从2.6A降低到1.3A,绕组相电流THD从22.48%降低到11.37%。
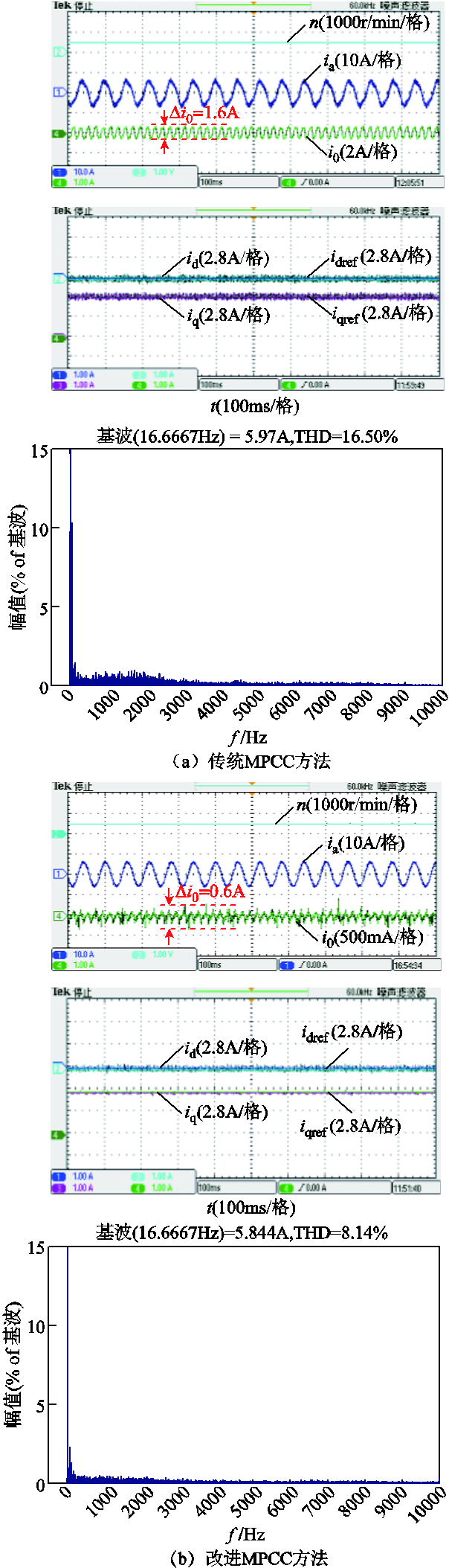
图10 两种方法在低速工况(500r/min)和4N×m负载下的稳态实验结果
Fig.10 Steady-state results of two methods at low speed of 500r/min with 4N×m load

图11 两种方法在中速工况(1000r/min)和4N×m负载下的稳态实验结果
Fig.11 Steady-state results of two methods at medium speed of 1000 r/min with 4 N×m load

图12 两种方法在额定工况(2000r/min)和4N×m负载下的稳态实验结果
Fig.12 Steady-state results of two methods at rated speed of 2000r/min with 4N×m load
另外,对比图12a与图12b可知,在额定工况下,很明显可以看出在混合双矢量MPCC控制下电机电流稳态性能更优,相比于传统方法,零序电流脉动Di0从4.2A降低到1.6A,同时相电流THD从34.84%大幅降低到14.26%。
上述结果表明本文提出的混合双矢量MPCC方法有效地抑制了零序电流与dq轴电流的脉动,从而改善了绕组电流的THD,提高了整个系统的稳态性能。
另外,为进一步验证所提出方法的有效性,给出了两种方法在不同速度条件下的电流THD对比,如图13所示。可以看出相比于传统MPCC方法,混合双矢量MPCC方法能够在全速域范围内有效地改善系统的稳态性能。
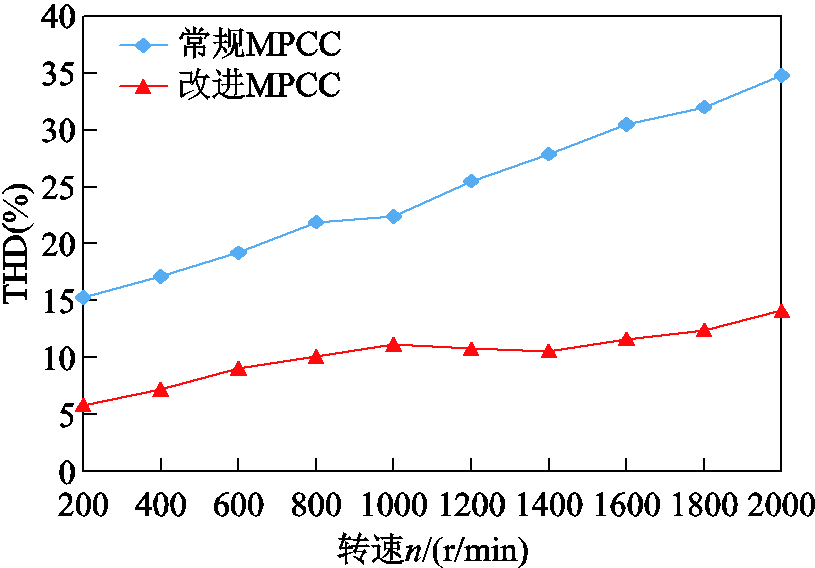
图13 两种方法在不同转速下的电流THD结果
Fig.13 Current THD analysis results of two methods at different speeds
为了评估两种方法的动态性能,本文给出了负载转矩发生突变时的实验结果,如图14所示。可以看出两种方法在负载转矩从2N×m升至4N×m的过程中,转速和电流均具有较快的动态响应速度。说明提出的混合双矢量MPCC方法在有效抑制零序电流并减少dq轴电流脉动的同时继承了模型预测控制动态响应快的优势。
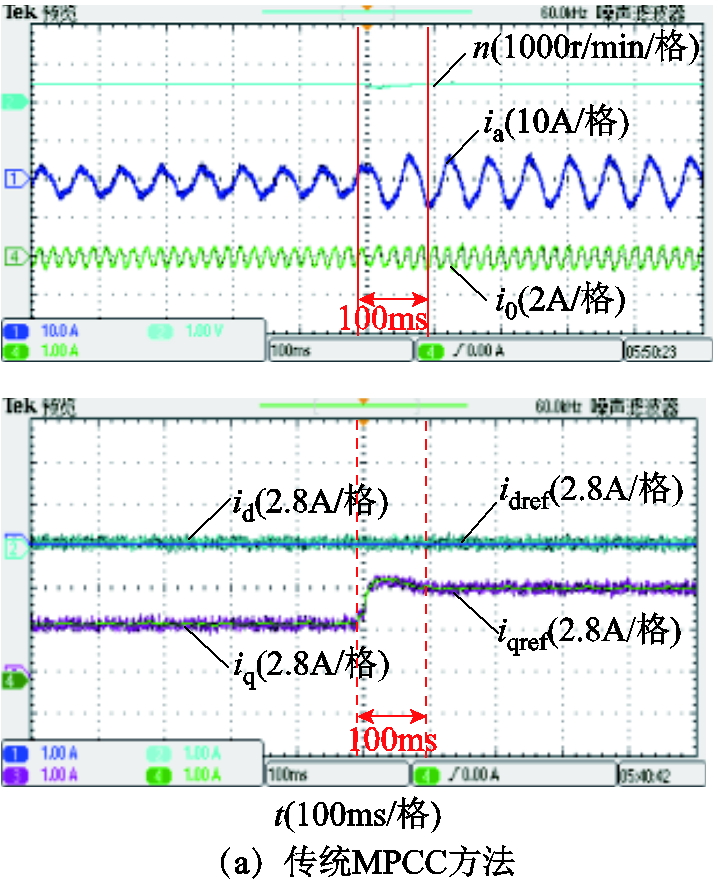
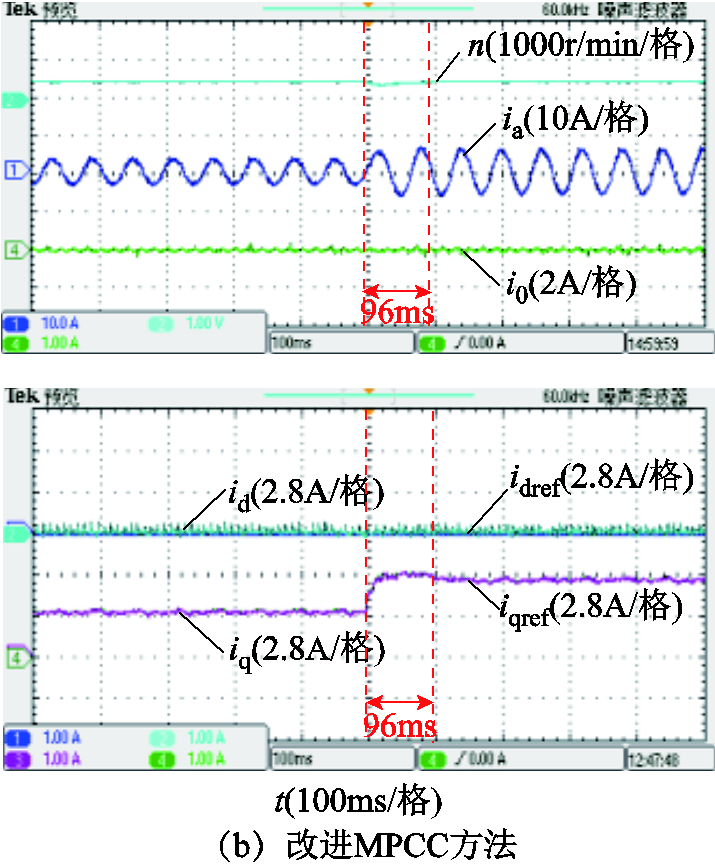
图14 两种方法在低速工况运行时负载转矩从2N×m到4N×m的动态实验结果
Fig.14 Dynamic experimental results of two methods when the load torque suddenly changes from 2N×m to 4N×m
本文提出了一种适用于开绕组永磁同步电机系统的混合双矢量模型预测控制方法,通过对两个逆变器施加不同的双电压矢量可实现对零序电流有效抑制的同时准确跟踪dq轴参考电流。该方法与传统预测控制方法相比,合理地减小了候选电压矢量个数,并具有更好的系统稳态控制性能。
参考文献
[1] 张晓光,张亮,侯本帅. 永磁同步电机优化模型预测转矩控制[J]. 中国电机工程学报, 2017, 37(16):4800-4809, 4905. Zhang Xiaoguang, Zhang Liang, Hou Benshuai. Improved model predictive torque control for permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2017, 37(16): 4800-4809, 4905.
[2] Zhang Xiaoguang, Cheng Yu, Zhao Zhihao, et al. Robust model predictive direct speed control for SPMSM drives based on full parameter disturbances and load observer[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 8361-8373.
[3] 袁渊, 朱孝勇, 左月飞, 等. 共直流母线开绕组电机的移相解耦控制策略[J]. 电工技术学报, 2019, 34(22): 4670-4677. Yuan Yuan, Zhu Xiaoyong, Zuo Yuefei, et al. Decoupled SVPWM control strategy for open winding permanent magnet synchronous motor with common DC bus[J]. Transactions of China Electrotechnical Society, 2019, 34(22): 4670-4677.
[4] 吕康飞, 董新伟, 刘丽丽, 等. 考虑零序电流抑制的开绕组永磁同步电机断相故障下统一调制策略[J].电工技术学报, 2020, 35(11): 2387-2395. Lü kangfei, Dong Xinwei, Liu Lili, et al. The unified modulation scheme of open-end winding PMSM with common DC bus under the open-phase fault considering the suppression of zero-sequence current[J]. Transactions of China Electrotechnical Society, 2020, 35(11): 2387-2395.
[5] Zhang Xiaoguang, Li Yi, Wang Keqin, et al. Model predictive control of the open-winding PMSG system based on three-dimensional reference voltage-vector[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6312-6322.
[6] 年珩, 曾恒力, 周义杰. 共直流母线开绕组永磁同步电机系统零序电流抑制策略[J].电工技术学报, 2015, 30(20): 40-48. Nian Heng, Zeng Hengli, Zhou Yijie. Sequence current suppression strategy for open winding permanent magnet synchronous motor with common DC bus[J]. Transactions of China Electrotechnical Society, 2015, 30(20): 40-48.
[7] Zhang Xiaoguang, Wang Keqin, Zhang Wenhan, et al. Dual delay-compensation-based model predictive control for the semi-controlled open-winding PMSM system[J]. IEEE Access, 2019, 7: 69947-69959.
[8] Zhang Xiaoguang, Cheng Yu, Zhang Liang. Disturbance-deadbeat inductance observer-based current predictive control for surface-mounted permanent magnet synchronous motors drives[J]. IET Power Electronics, 2020, 13(6):1172-1180.
[9] Zhan Hanlin, Zhu Z Q, Odavic M. Analysis and suppression of zero sequence circulating current in open winding PMSM drives with common DC bus[J]. IEEE Transactions on Industry Applications, 2017, 53(4): 3609-3620.
[10] 安群涛, 孙力, 孙立志. 新型开放式绕组永磁同步电机矢量控制系统研究[J]. 中国电机工程学报, 2015, 35(22): 5891-5898. An Quntao, Sun Li, Sun Lizhi. Research on novel open-end winding permanent magnet synchronous motor vector control systems[J]. Proceedings of the CSEE, 2015, 35(22): 5891-5898.
[11] 尹靖元, 金新民, 杨捷, 等. 开绕组电机驱动用双三电平逆变器的共模电压差抑制[J]. 电工技术学报, 2016, 31(15): 178-186. Yin Jingyuan, Jin Xinmin, Yang Jie, et al. The differential common mode voltage elimination of dual three-level converter for open-end winding motor drives[J]. Transactions of China Electrotechnical Society, 2016, 31(15): 178-186.
[12] Zhou Yijie, Nian Heng. Zero-sequence current suppression strategy of open-winding PMSG system with common DC bus based on zero vector redistribution[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3399-3408.
[13] 曾恒力, 年珩, 周义杰. 基于比例谐振控制的共直流母线开绕组永磁同步电机零序电流抑制技术[J]. 电工技术学报, 2016, 31(22): 35-44. Zeng Hengli, Nian Heng, Zhou Yijie. Zero sequence current suppression for open winding permanent magnet synchronous motor with common DC bus based on proportional-resonant controller[J]. Transactions of China Electrotechnical Society, 2016, 31(22): 35-44.
[14] Somani A, Gupta R K, Mohapatra K K, et al. On the causes of circulating currents in PWM drives with open-end winding AC machines[J]. IEEE Transactions on Industrial Electronics, 2013, 60(9):3670-3678.
[15] Zhang Xiaoguang, Wang Keqin, Wu Chi. Current prediction based zero sequence current suppression strategy for the semicontrolled open-winding PMSM generation system with a common DC bus[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6066-6076.
[16] Zhang Xianguang, Zhang Wenhan, Xu Chi, et al. Three-dimensional vector based model predictive current control for open-end Winding PMSG system with zero-sequence current suppression[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, DOI: 10.1109/ JESTPE.2019.
[17] 魏梦飒, 葛祖郁. 新型绕组开路型永磁电机共模电压抑制技术研究[J]. 智能电网, 2014, 2(5): 11-17. Wei Mengsa, Ge Zuyu. Common-mode voltage elimination technique for a novel open-end winding permanent-magnetic motor drive system[J]. Smart Grid, 2014, 2(5): 11-17.
[18] Zhu Bohang, Rajashekara K, Kubo H. Predictive torque control with zero-sequence current suppression for open-end winding induction machine[C]//IEEE Industry Applications Society Annual Meeting, Addison, TX, USA, 2015: 1-7.
[19] 徐艳平, 王极兵, 周钦, 等. 永磁同步电动机双优化三矢量模型预测电流控制[J]. 中国电机工程学报, 2018, 38(6):1857-1864, 1923. Xu Yanping, Wang Jibing, Zhou Qin, et al. Double optimization three-vector-based model predictive current control for permanent magnet synchronous motors[J]. Proceedings of the CSEE, 2018, 38(6): 1857-1864, 1923.
Hybrid Double Vector Model Predictive Control for Open-Winding Permanent Magnet Synchronous Motor with Common DC Bus
Abstract In order to suppress the generation of zero-sequence current and reduce the current ripple in the open-winding permanent magnet synchronous motor (OW-PMSM), an improved model predictive current control (MPCC) method is proposed to suppress the zero-sequence current. Firstly, we group six non-zero voltage vectors according to the magnitude of the voltage that generates the zero sequence; secondly, a reference voltage vector is used to directly select the nonzero voltage vector and zero vector of the first inverter, and the zero vector action time is calculated to realize the control of the zero sequence current. On this basis, two candidate nonzero voltage vectors of the second inverter are selected and the action time is calculated to realize the tracking of the d-q axis current. In this method, the first inverter acts on a non-zero voltage vector and a zero vector for each control period, and the second inverter acts on two non-zero voltage vectors for each control period, thus forming a hybrid double vector method. Experimental results show that the proposed hybrid double vector MPCC method can effectively suppress the generation of zero-sequence current and reduce the current ripples and improve the steady-state performance of the system.
keywords:Open-winding permanent magnet synchronous motor, zero-sequence current, model predictive current control
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.200765
国家自然科学基金(51877002)、北京市科技新星计划(Z191100001119036)、北京市高创计划青年拔尖人才(2017000026833ZK12)、北京市属高校青年拔尖人才(CIT&TCD201904011)和北方工业大学毓杰人才资助项目。
收稿日期2020-06-30
改稿日期 2020-08-17
张晓光 男,1985年生,博士,特聘教授,研究方向为电机系统及其控制。E-mail:zhangxg123456789@163.com(通信作者)
闫 康 男,1997年生,硕士研究生,研究方向为永磁电机及其控制。E-mail:729857315@qq.com
(编辑 郭丽军)