 nmax=110)的永磁同步发电机的PWM整流控制方法。通过建立PMSG的小信号分析模型和脉冲宽度调制(PWM)整流器的传递函数,分析了控制参数对系统性能的影响,获得了PMSG系统控制参数的优化方法。通过仿真和实验验证了系统模型与分析方法的正确性,研究结果表明,采用优化得到的控制参数,在200~2 000r/min宽转速范围内,PMSG系统具有良好的电压跟随性能和抗负载扰动性能,实现了高性能稳压输出。
nmax=110)的永磁同步发电机的PWM整流控制方法。通过建立PMSG的小信号分析模型和脉冲宽度调制(PWM)整流器的传递函数,分析了控制参数对系统性能的影响,获得了PMSG系统控制参数的优化方法。通过仿真和实验验证了系统模型与分析方法的正确性,研究结果表明,采用优化得到的控制参数,在200~2 000r/min宽转速范围内,PMSG系统具有良好的电压跟随性能和抗负载扰动性能,实现了高性能稳压输出。摘要 永磁同步发电机(PMSG)系统一般由PMSG和变流器构成。针对直流负载,该文研究了具有宽转速范围(nminnmax=110)的永磁同步发电机的PWM整流控制方法。通过建立PMSG的小信号分析模型和脉冲宽度调制(PWM)整流器的传递函数,分析了控制参数对系统性能的影响,获得了PMSG系统控制参数的优化方法。通过仿真和实验验证了系统模型与分析方法的正确性,研究结果表明,采用优化得到的控制参数,在200~2 000r/min宽转速范围内,PMSG系统具有良好的电压跟随性能和抗负载扰动性能,实现了高性能稳压输出。
关键词:永磁同步发电机 宽转速范围运行 稳压控制 控制参数优化
近年来,直流电能系统,特别是独立电能系统受到越来越广泛的关注[1-5],如直驱式风机[1-2]、特种车辆[3]和军舰船舶[4]发电系统等。上述独立电能系统,工况复杂多变,发电机转速会实时变化,有的变化范围很宽(nminnmax=110),导致机端输出交流电的幅值和频率不稳定,很难直接将其作为供电电源,因此,往往需在发电机的后级接入整流装置,以得到稳定可控的电能输出。
基本的独立直流电能系统如图1所示,一台发电机在原动机的拖动下对外发出不稳定的交流电,经AC-DC整流装置和滤波电容C后输出稳定可控的直流电能。整流器的后级即直流母线,可直接接入或经DC-DC变换器后间接接入直流负载和储能装置,也可经DC-AC变换器后接入交流负载或电网。
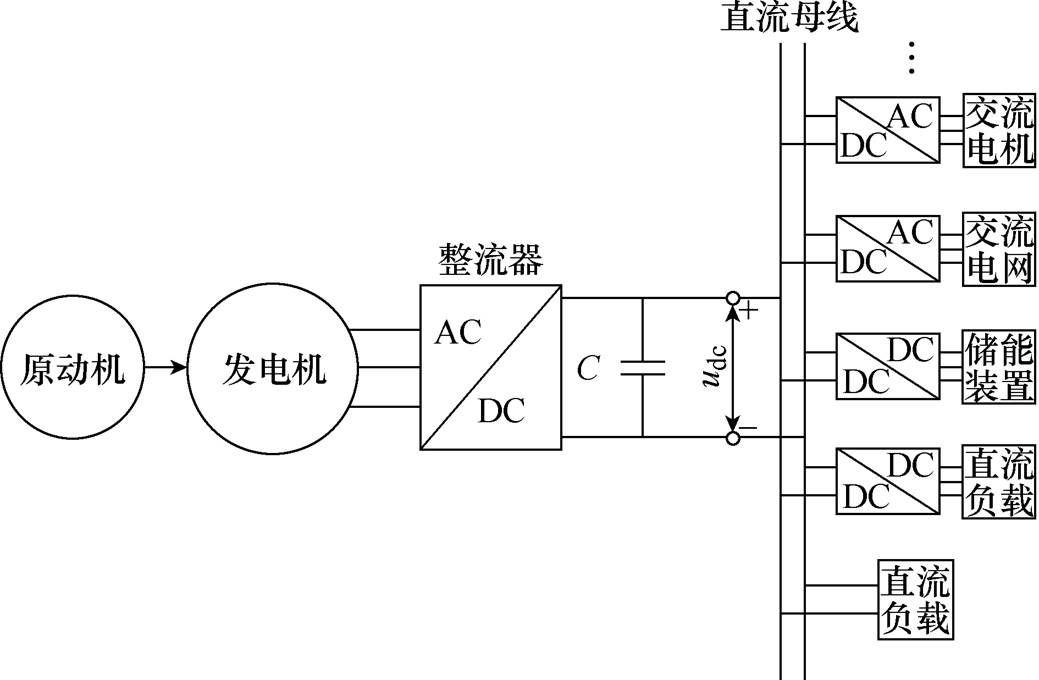
图1 基本的独立直流电能系统
Fig.1 Fundamental independent DC energy system
随着永磁材料和电力电子技术的不断进步,永磁同步电机的性能得到大幅提升,与电励磁同步发电机和双馈感应发电机等电机相比,永磁同步发电机(Permanent Magnet Synchronous Generator, PMSG)采用永磁体励磁,具有结构简单、功率密度高和运行效率高等优点,在这类独立直流电能系统的应用愈加广泛。
传统的AC-DC整流装置大都采用相控整流或不控整流+DC-DC变换器,如图2所示,此两种整流方案会给发电机侧带来谐波污染,导致损耗与发热增加、效率降低和转矩脉动变大等诸多问题。此外,由于永磁体励磁不可调节,在转速运行范围很宽时,变速PMSG机端电压和整流器直流侧电压的变化幅度很大,这对功率开关器件和滤波电容的电压等级要求较高,给选型造成困难。进一步地,这类传统的整流方案仅稳定直流端电压,而未对发电机端电压进行控制,属于单端口稳压[6]。
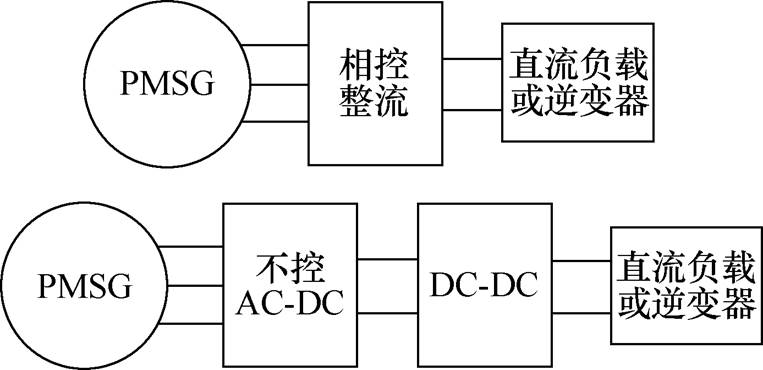
图2 传统的变速PMSG稳压方案
Fig.2 Traditional voltage regulation schemes for variable speed PMSG
同时对发电机端交流电压和整流器直流端电压进行控制,属于双端口稳压,即在保持机端电压基本稳定的基础上利用整流器进行稳压,可避免功率开关器件选型困难和DC-DC变换器的升降压比过大或过小等问题。而调节PMSG输出端电压可采用机械式调节励磁、混合励磁或向电枢绕组注入直轴电流以调节气隙磁密等方法,由于前两者存在结构复杂、成本较高和制造困难等问题,因而一般采用后者来实现调压[7]。脉冲宽度调制(Pulse Width Modulation, PWM)整流器具有能量可双向流动的特点,可将直轴电流馈入电枢绕组来调节发电机端交流电压,能够显著减少交流侧电流的谐波含量和提高电机功率因数。此外,也能调节直流端电压,保证直流侧具有较高的输出电压精度和较小的电压纹波,真正实现双端口稳压[7-8],因而在变速PMSG系统稳压上具有较大的竞争优势。
针对PWM整流器,已有文献大多是面向电网的整流应用,提出了一些稳压控制策略,如电压定向控制[9]和直接功率控制[10-11]等,这些控制策略经过改进后也可用于PMSG系统的AC-DC稳压控制。而目前涉及基于PWM整流器的宽转速范围PMSG系统稳压控制的研究仍然较少。另一方面,传统的电动机控制方法如磁场定向控制[12]和直接转矩控制[13],也同样适用于PWM整流控制。文献[14]和文献[15-16]基于磁场定向控制和直接转矩控制,提出了改进的磁场定向控制策略、直接电压磁场定向控制和直接电压控制。此三种稳压控制方法均能有效降低输出电压的偏差和纹波,但各有其优缺点:①改进的磁场定向控制和直接电压磁场控制,电枢电流的谐波含量少,但直流母线电压的恢复时间较长;②直接电压控制,直流母线电压恢复时间较短,但电流谐波含量较多。
对于改进的磁场定向控制策略[14],控制参数的选取会对系统的抗负载扰动能力产生较大的影响。本文通过控制参数的优化,有效提高了系统的抗负载扰动能力。首先,根据PMSG的小信号模型和系统的传递函数,分析了控制参数对系统性能的影响,提出了有关参数的优化方法,然后,仿真和实验结果表明,采用优化后的控制参数,系统具有较强的电压跟随能力和抗负载扰动能力,实现在宽转速范围的高性能稳压输出。
宽转速范围PMSG系统结构如图3所示,主要包括三相PMSG、PWM整流器、滤波电容C和直流负载。系统的工作原理如下:原动机拖动PMSG旋转而对外输出交流电能,经PWM整流器和滤波电容C后变换成电压稳定的直流电能,供给负载。
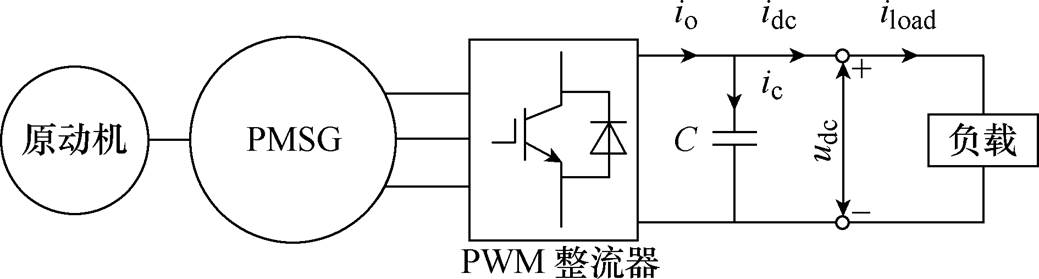
图3 宽转速范围PMSG系统结构
Fig.3 Schematic of wide-speed-range PMSG system
忽略PMSG铁心饱和、涡流和磁滞损耗,定子三相绕组采用发电机惯例,即正电流产生负磁链,并通过恒相幅值变换,可得到PMSG在dq坐标系下的数学模型[17]。
电压方程为
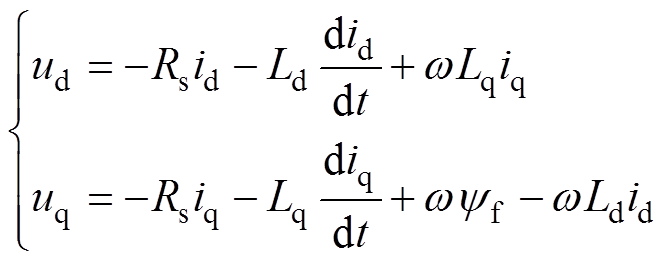 (1)
(1)式中,Rs为定子每相电阻;Ld和Lq分别为直轴和交轴同步电感;w 为PMSG的电角速度;yf为永磁体励磁磁链基波分量的幅值。
转矩方程为
 (2)
(2)式中,p为极对数。
忽略功率管损耗,根据PWM整流器的瞬时输入与输出功率近似平衡条件,则有
 (3)
(3)结合式(1)和式(3),忽略定子电阻Rs,在稳态工作点(Udc, Ud, Id, Uq, Iq)附近对系统进行小信号分析,则
 (4)
(4)
式中, 和
和 分别为PMSG的q轴电流iq和PWM整流器输出电流io的微小扰动量。
分别为PMSG的q轴电流iq和PWM整流器输出电流io的微小扰动量。
本文采用一种改进的磁场定向控制策略[14],PMSG系统的控制原理框图如图4所示,在传统的电压电流双闭环基础上,再引入一个新的电压反馈通道,其反馈系数为KT_v,该电压反馈无需经过电压调节器AVR,直接与AVR的输出转矩给定值 比较,所得偏差值
比较,所得偏差值 再输出给q轴电流环,以此形成一个电压内环。
再输出给q轴电流环,以此形成一个电压内环。
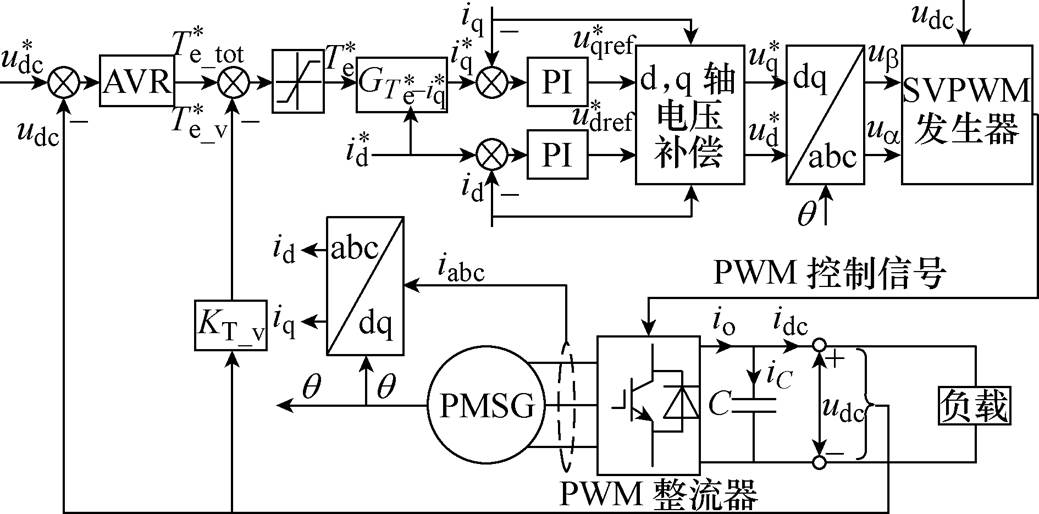
图4 PMSG系统的控制原理框图
Fig.4 Control scheme of PMSG system
直轴电流给定值 与原动机转速高低和直流侧负载大小有关[8]。在转速较高和负载较重时需注入适当的d轴弱磁电流,以减小PMSG输出交流电压幅值,实现稳压控制。
与原动机转速高低和直流侧负载大小有关[8]。在转速较高和负载较重时需注入适当的d轴弱磁电流,以减小PMSG输出交流电压幅值,实现稳压控制。
根据式(2),从 到
到 的传递函数为
的传递函数为
 (5)
(5)假设某一时刻,负载扰动或转速变化引起直流母线电压udc下降,此时偏差值 增加,电压调节器AVR的输出转矩给定值相应地增加,而此时新引入的电压反馈通道的输出值
增加,电压调节器AVR的输出转矩给定值相应地增加,而此时新引入的电压反馈通道的输出值 也减小,使得偏差迅速增加,从而系统地输入有功功率增加,直流母线电压迅速回升;反之亦成立。
也减小,使得偏差迅速增加,从而系统地输入有功功率增加,直流母线电压迅速回升;反之亦成立。
因此,引入新的电压反馈,能够加快转矩的瞬态响应速度,减小电压动态降落和恢复时间[14],有效地提高了系统的抗负载扰动性能。
由于d、q轴电流环传递函数的形式和控制参数的优化方法基本一致,因此本文仅以q轴电流环为例进行介绍。
2.2.1 q轴电流环传递函数
通过d、q轴电压解耦处理,可消除式(1)中id和iq之间的交叉耦合项,则q轴电流环的结构框图如图5所示。

图5 q轴电流环的结构框图
Fig.5 Block diagram of q-axis current loop
根据零极点对消,令
 (6)
(6)得,q轴电流环的闭环传递函数为
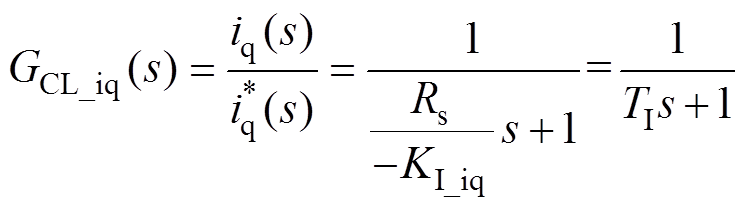 (7)
(7)
式中,TI为q轴电流环的时间常数,即
 (8)
(8)则闭环频率特性的带宽频率wCL_i为
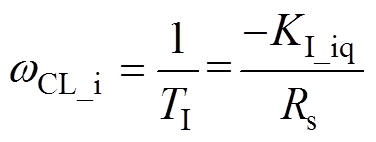 (9)
(9)
2.2.2 控制参数的优化
结合q轴的电磁时间常数Tq=Lq/Rs,合理选择带宽频率wCL_i,可得q轴电流环的PI参数为
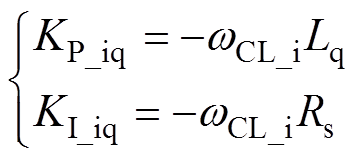 (10)
(10)同理可得d轴电流环的PI参数为
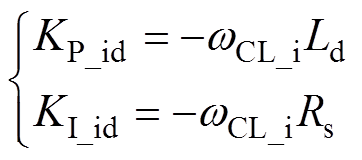 (11)
(11)
电压环的结构框图如图6所示,电压环的输入量分别是电压给定 和负载扰动
和负载扰动 ,输出量为直流母线电压
,输出量为直流母线电压 ,共有电压外环(从到)和电压内环(从到)两个环路。
,共有电压外环(从到)和电压内环(从到)两个环路。
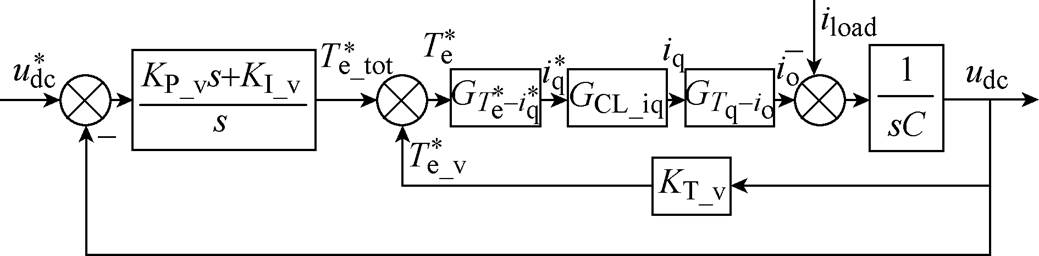
图6 电压环的结构框图
Fig.6 Block diagram of voltage loop
根据输入量的不同,电压环的传递函数可分为电压给定传递函数(从到)和负载扰动传递函数(从到)。
2.3.1 电压给定传递函数
不考虑负载扰动输入,仅考虑电压给定输入,电压环的结构框图如图7a所示。
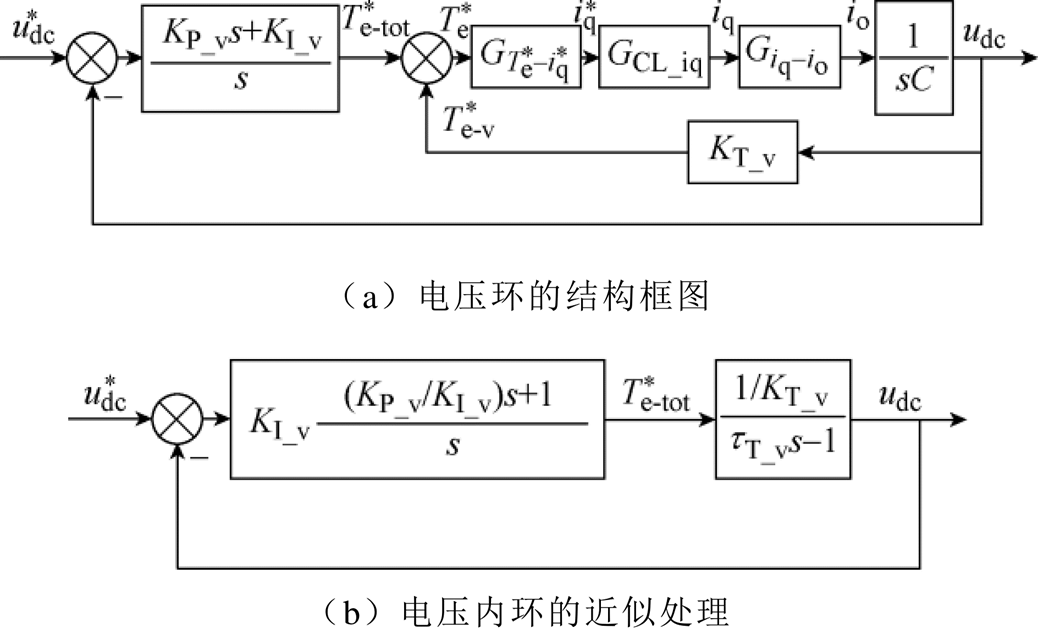
图7 电压环的结构框图及其化简(仅考虑电压给定)
Fig.7 Block diagram of voltage loop and its simplification (with voltage command considered only)
现求电压内环(从到udc)的闭环传递函数为
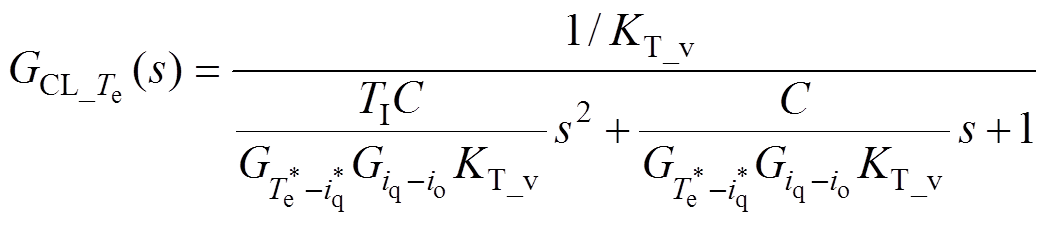
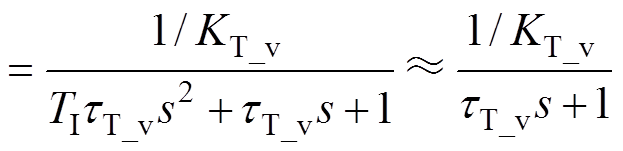 (12)
(12)
式(12)的近似处理条件将在2.3.3小节中进行校核,其中tT_v为电压内环的时间常数,即
 (13)
(13)于是,结构框图可等效为图7b,根据零极点对消,令
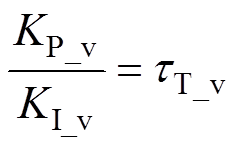 (14)
(14)
得,电压给定传递函数为
 (15)
(15)式中,tCL_v为电压外环的时间常数,即
 (16)
(16)
则闭环频率特性的带宽频率wCL_v为
 (17)
(17)2.3.2 负载扰动传递函数与性能分析
不考虑电压给定输入,仅考虑负载扰动输入,电压环的结构框图可等效为图8。
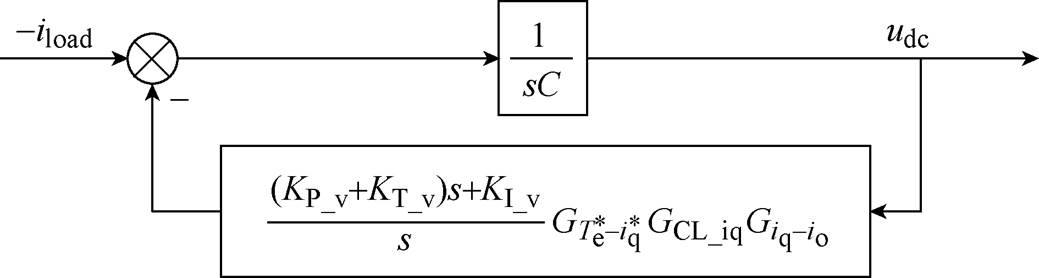
图8 电压环的等效结构框图(仅考虑负载扰动)
Fig.8 Block diagram of voltage loop (with load disturbance considered only)
负载扰动开环传递函数为
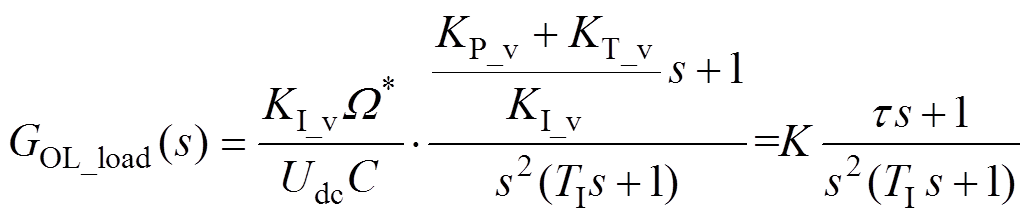 (18)
(18)根据式(13)、式(14)和式(16),可将式(18)中的各系数重写为
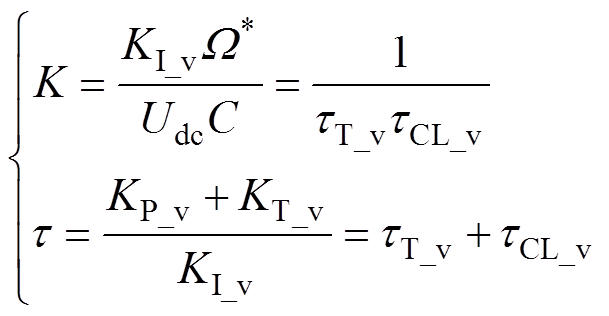 (19)
(19)
式(18)与式(19)中,电压外环时间常数tCL_v人为设定,而电压内环时间常数tT_v待定,现分析参数tT_v对系统性能的影响。
根据负载扰动开环传递函数即式(18),可得系统的近似对数幅频特性曲线如图9所示,则
 (20)
(20)即系统的开环截止频率wcvl为
 (21)
(21)
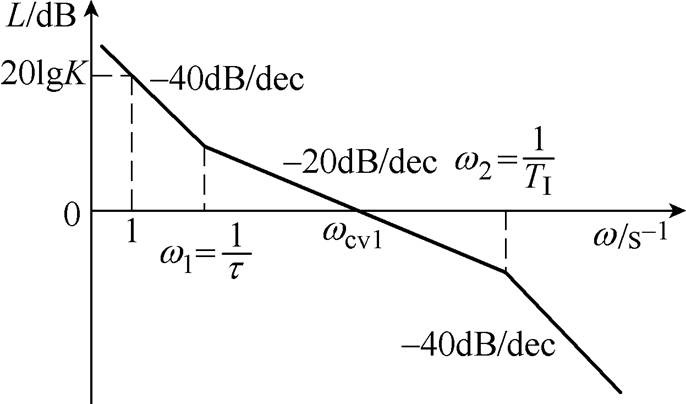
图9 对数幅频特性曲线的渐近线
Fig.9 Asymptotes of log magnitude-frequency characteristics
一般来说,开环截止频率越高,系统的瞬态响应速度也越快[18],因此为了获得更好的抗负载扰动性能,需使电压内环时间常数tT_v远小于电压外环时间常数tCL_v,于是,相位裕度g 的表达式可近似为

 (22)
(22)
根据式(13)、式(21)和式(22),转速 一定时,增加KT_v,tT_v变小,则开环截止频率wcvl提高,表现在时域上,突加相同大小的负载扰动后,直流母线电压的瞬态响应速度加快,系统的抗负载扰动性能变好;但同时,增加KT_v也会导致系统的相位裕度g 变小,相对稳定性变差。反之,则相反。
一定时,增加KT_v,tT_v变小,则开环截止频率wcvl提高,表现在时域上,突加相同大小的负载扰动后,直流母线电压的瞬态响应速度加快,系统的抗负载扰动性能变好;但同时,增加KT_v也会导致系统的相位裕度g 变小,相对稳定性变差。反之,则相反。
同样地,根据式(13)、式(21)和式(22),KT_v一定时,随着转速降低,tT_v越大,则开环截止频率wcvl越低,表现在时域上,突加相同大小的负载扰动后,直流母线电压的瞬态响应速度越慢,系统的抗负载扰动性能变差。但同时,随着转速降低,相位裕度g 会增加,相对稳定性变好;反之,则相反。
2.3.3 近似处理条件的校核
在电压环结构框图(仅考虑电压给定,见图7)的化简中,式(12)运用了近似处理,近似条件[18]为
 (23)
(23)于是,由式(23)可得,tT_v需满足条件
 (24)
(24)
而对于仅考虑负载扰动的电压环结构框图(见图8)而言,其在化简过程中没有近似处理,无需校核。
2.3.4 控制参数的优化
需要优化的控制参数有三个,分别是电压反馈系数KT_v、电压外环调节器的比例系数KP_v和积分系数KI_v。
根据式(13)、式(14)和式(16),得
 (25)
(25) (26)
(26)
式中,电压外环闭环时间常数tCL_v取值即为带宽频率wCL_v的倒数;wCL_v和C可预先根据系统特性选定,对本文研究的仿真与实验系统,相关参数见第3节;Udc和可测量得到;因此,比例系数KP_v可直接确定。而根据式(26),在确定KT_v取值后,积分系数KI_v即可得到。
1)KT_v的优化
由于新引入的电压反馈的输出值直接计入转矩给定中,则在宽转速范围内,反馈系数KT_v需设置为常值;否则会向电压环额外引入一个扰动,容易造成系统不稳定。
增大KT_v会提升系统的抗负载扰动性能,但同时也会导致系统的相位裕度变小,相对稳定性变差。因而在宽转速范围内,确定KT_v参数时,需要兼顾系统的抗负载扰动能力和相对稳定性,进行合理取值。
2)KP_v和KI_v的优化
在合适地选定电压环闭环频率特性的带宽频率wCL_v之后,根据式(26)可得到KI_v的值;根据式(25)可知,KP_v的取值随着转速的变化而实时改变。
本文研究的宽转速范围PMSG系统的相关参数见表1。需要说明的是,母线电容C越大,稳态时的母线电压纹波越小,但硬件的体积和成本增加。因此,电容C的取值需要综合考虑体积、成本和母线电压品质。本文仿真研究表明,电容C取2 700mF 可以获得较好的性价比,实验研究所用的硬件装置也有足够空间安装该电容。此外,电流环和电压环的带宽频率在一定合理范围内取值即可,并无数值上的严格限制;一般情况下,可以初选电流环的带宽频率wCL_i比PWM整流器中功率管开关频率fs小一到两个数量级、电压环的带宽频率wCL_v比电流环的带宽频率wCL_i小一到两个数量级,在此基础上通过仿真研究确定最终适合系统运行的参数。
表1 PMSG系统的基本参数和控制常量
Tab.1 Basic parameters and control constants of PMSG system
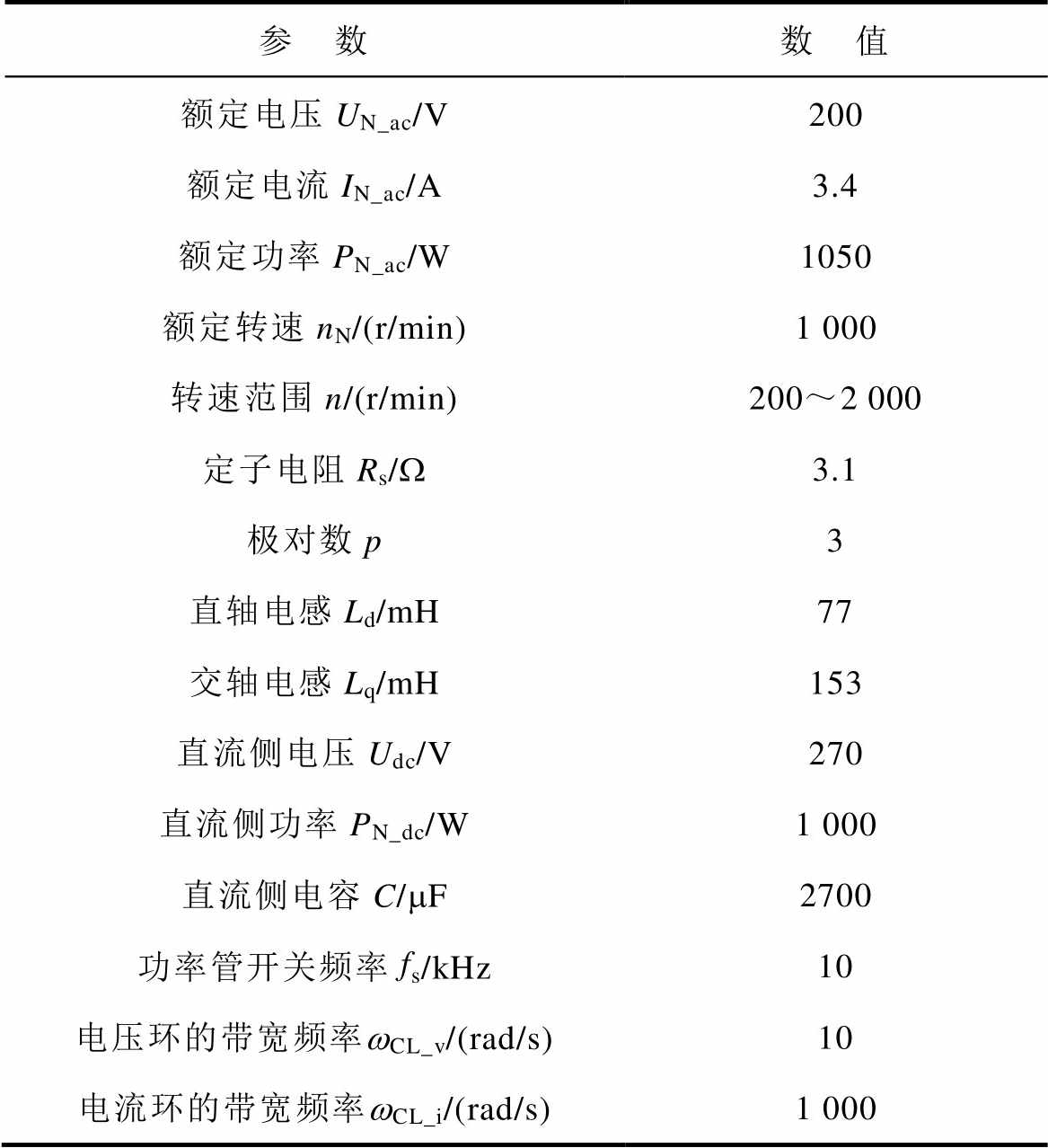
参 数数 值 额定电压UN_ac/V200 额定电流IN_ac/A3.4 额定功率PN_ac/W1050 额定转速nN/(r/min)1 000 转速范围n/(r/min)200~2 000 定子电阻Rs/W3.1 极对数p3 直轴电感Ld/mH77 交轴电感Lq/mH153 直流侧电压Udc/V270 直流侧功率PN_dc/W1 000 直流侧电容C/mF2700 功率管开关频率fs/kHz10 电压环的带宽频率wCL_v/(rad/s)10 电流环的带宽频率wCL_i/(rad/s)1 000
PMSG的转速运行于1 000~2 000r/min时,处于恒功率范围内,直流侧输出功率保持为额定功率1.0kW不变;而运行于200~1 000r/min时,处于恒转矩范围内,直流侧输出功率随着转速的降低而减小。
PMSG运行于最低转速200r/min时,控制参数KT_v分别取0.6、1.0和2.0(单位:N·m/V),在直流母线电压稳定时,将直流侧负载电流由0A突增至0.47A,此时PMSG满负荷运行,直流母线电压的瞬态变化过程如图10所示。
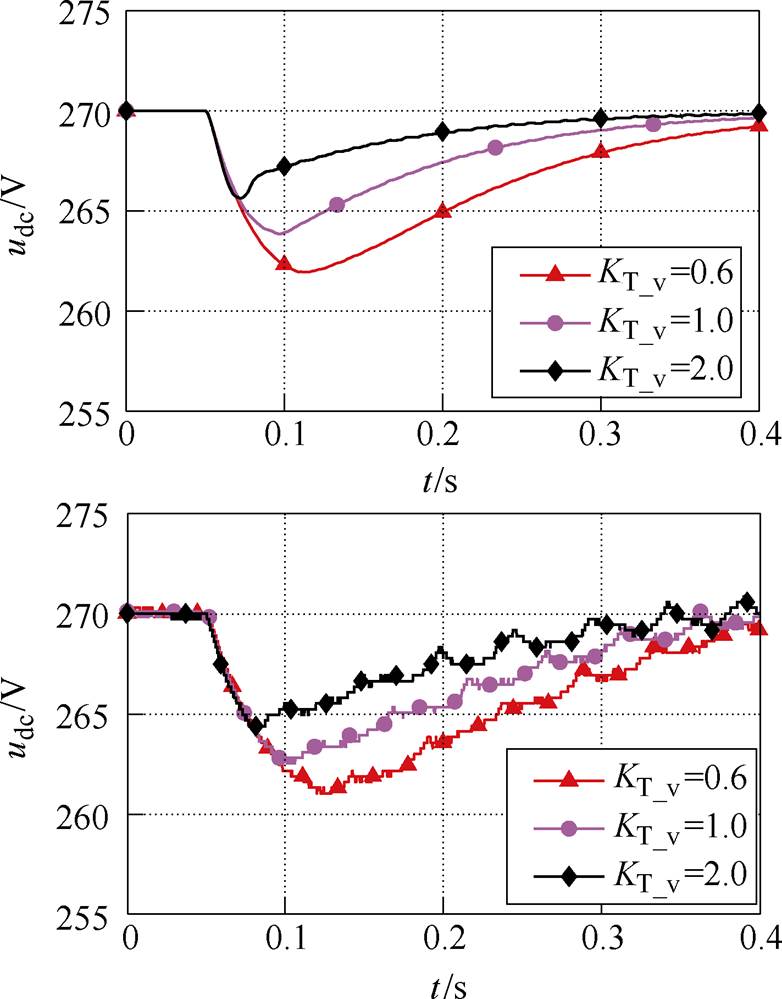
图10 200r/min时突增0.47A负载后直流母线电压仿真(上)和实验结果(下)
Fig.10 Simulation (upper) and experimental (lower) results of DC-bus voltage after sudden DC load of 0.47A at 200r/min
运行转速分别为额定值1 000r/min和最高转速2 000r/min时,直流侧负载电流均由0突加至3.7A,其余实验条件和最低转速200r/min相同,此时PMSG满负荷运行,结果如图11和图12所示。
此外,也进行了600r/min和1 500r/min转速下的突加负载实验(分别突加2.2A和3.7A负载),得到了不同转速下的直流母线电压的动态降落和恢复时间,如图13所示,本文中,恢复时间定义为在突加阶跃负载扰动后,母线电压恢复至给定电压2V偏差内的最短时间。当转速从200r/min增大至1 000r/min时,所施加的负载电流逐渐增加,造成母线电压的动态降落逐渐增加,而在1 000~2 000r/min之间,负载电流维持3.7A不变,动态降落和恢复时间随着转速的增加而减小,反映出系统的抗负载扰动能力变强。
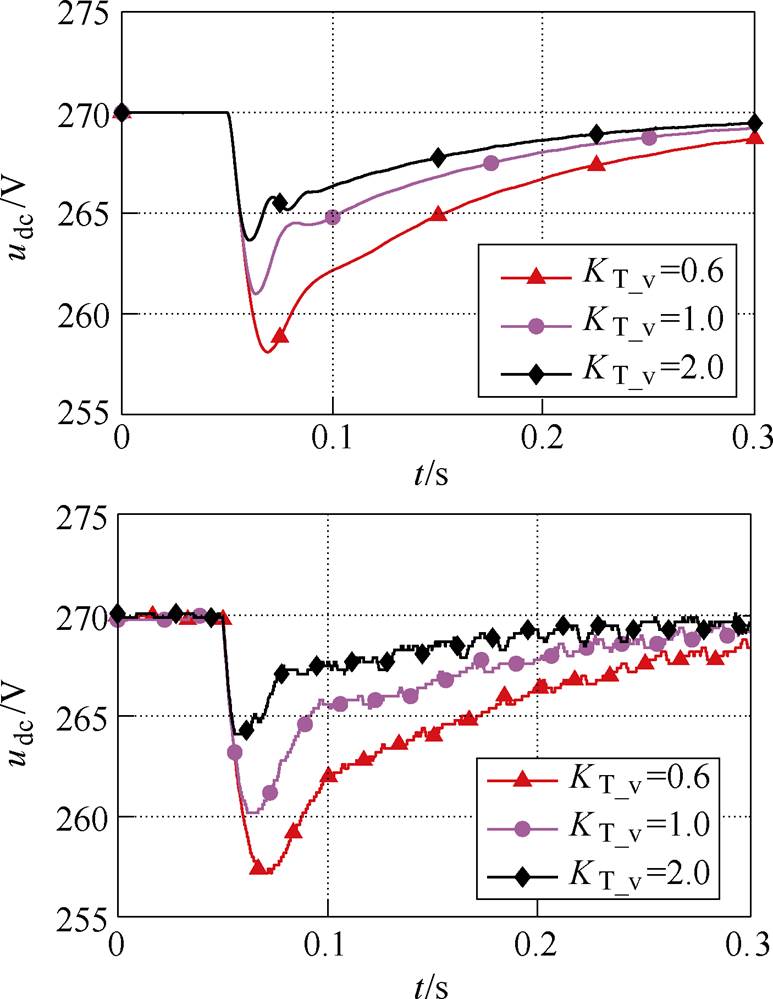
图11 1 000r/min时突增3.7A负载后直流母线电压仿真(上)和实验结果(下)
Fig.11 Simulation (upper) and experimental (lower) results of DC-bus voltage after sudden DC load of 3.7A at 1 000r/min
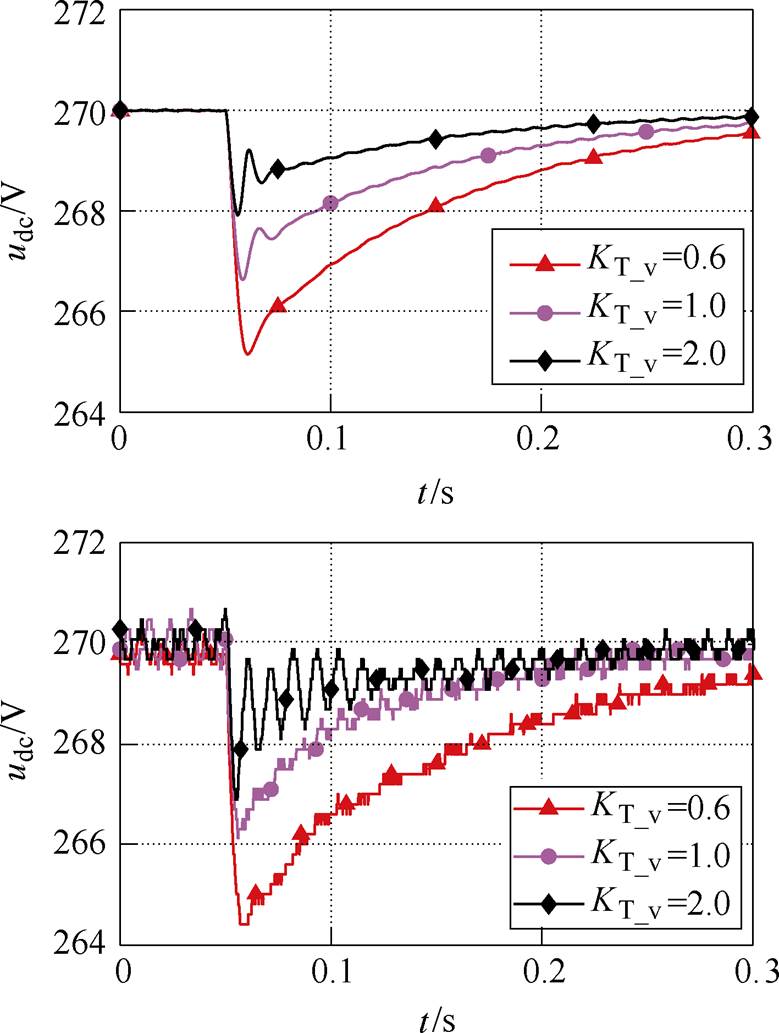
图12 2 000r/min时突增3.7A负载后直流母线电压仿真(上)和实验结果(下)
Fig.12 Simulation (upper) and experimental (lower) results of DC-bus voltage after sudden DC load of 3.7A at 2 000r/min
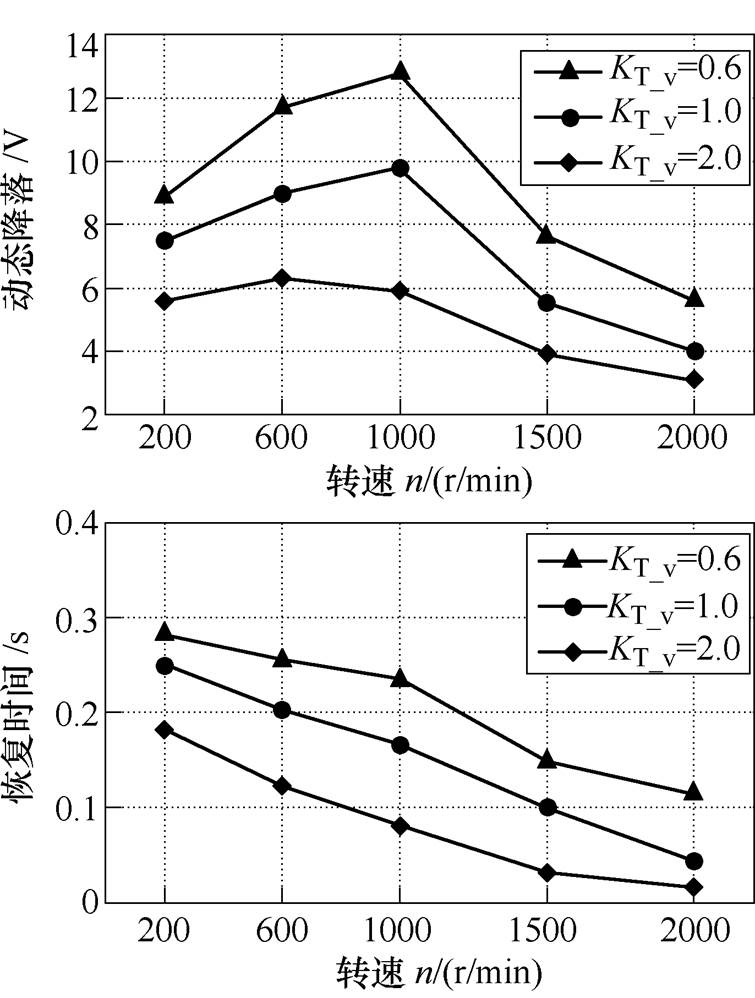
图13 不同转速和不同KT_v取值对电压动态降落(上)和恢复时间(下)的影响
Fig.13 Effects of different rotating speeds and different values of KT_v on voltage dynamic drop (upper) and recovery time (lower)
观察图13可知,运行转速 和突增的负载电流均相同时,增加KT_v,直流母线电压的动态降落和恢复时间均减小,即电压的瞬态响应速度加快,反映出系统的抗负载扰动能力变强。这也验证了前述的理论分析。
和突增的负载电流均相同时,增加KT_v,直流母线电压的动态降落和恢复时间均减小,即电压的瞬态响应速度加快,反映出系统的抗负载扰动能力变强。这也验证了前述的理论分析。
由图13可知,KT_v取值过小时,突增负载扰动后,直流母线电压的动态降落和恢复时间较大。但是KT_v取值也不能过大,图12中,在最高转速2 000r/min下,KT_v取值过大,突增负载扰动后,直流母线电压在恢复过程中,振荡次数明显增加,反映出系统的相位裕度较小,相对稳定性较差。
因此,为了兼顾系统在较低转速下的抗负载扰动能力和在较高转速下的相对稳定性,折中选取电压反馈系数KT_v为1.2N·m/V。后续实验均在此取值下进行。
在PMSG样机的全转速范围内,选择三种典型工况即最低速200r/min、中速1 000r/min和最高速2 000r/min。
先令直流侧开路,即PMSG空载运行,再将电压给定由270V增加至280V,直流母线电压的瞬态变化过程如图14所示,三种转速下的实际电压udc瞬态变化曲线几乎完全重叠。
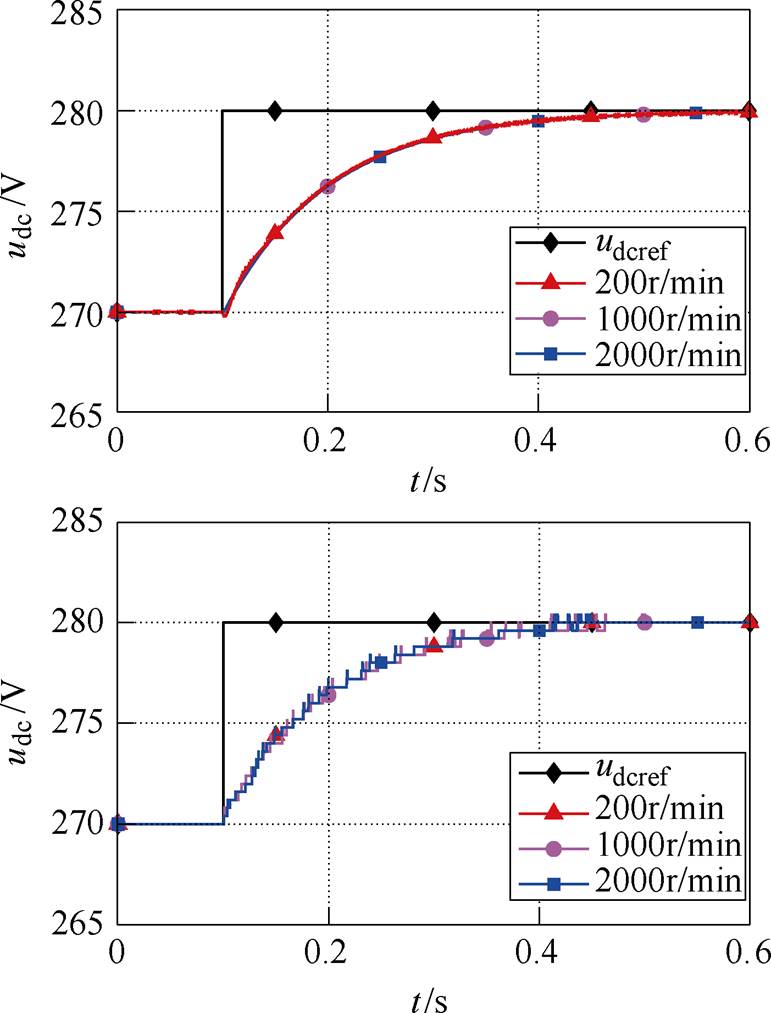
图14 突增电压给定后直流母线电压仿真(上)和实验(下)结果
Fig.14 Simulation (upper) and experimental (lower) results of DC-bus voltage after sudden command increase
由图14可知,在突增电压给定之后的0.3s内,实际电压值与给定值基本吻合,与电压环带宽频率设计值wCL_v=10rad/s一致,表明全转速范围内,系统具有良好的电压跟随性能。
设定PMSG的运行转速为额定值1 000r/min,仿真和实验结果如图15所示。0~0.2s内,直流母线电压稳定在270V,在0.2s时将直流侧的负载电流,由0A突增至3.7A(满载),然后在1.0s时将负载电流由3.7A突减至0A。容易发现,仿真和实验波形基本吻合。
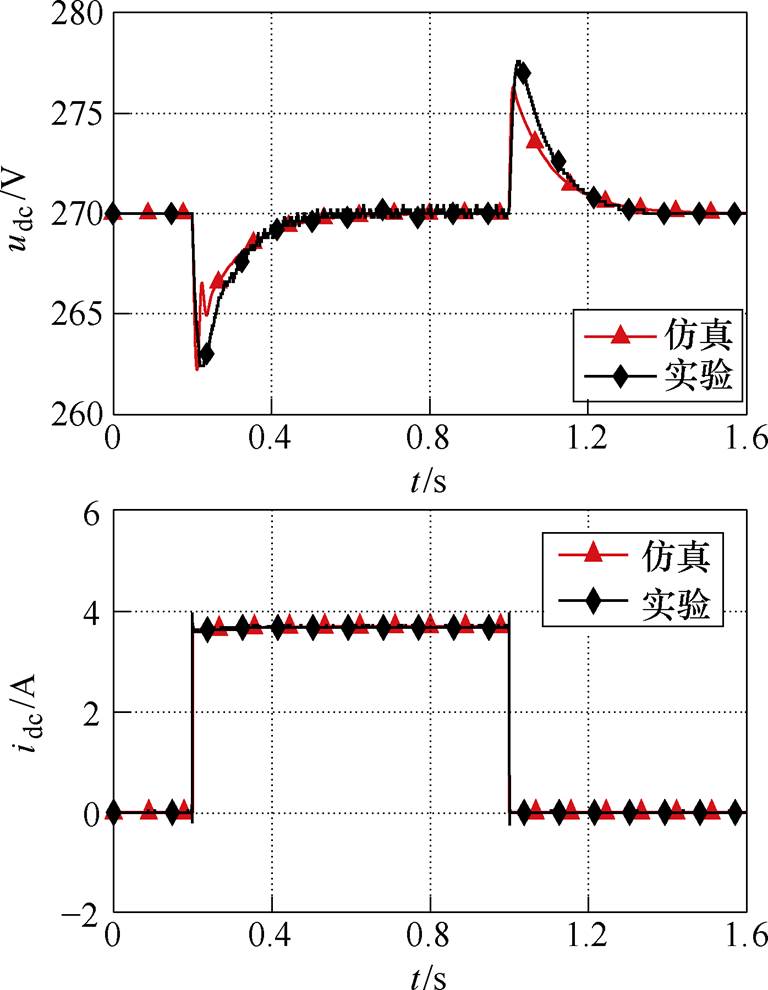
图15 1 000r/min时突增和突减3.7A负载后直流母线电压仿真和实验结果
Fig.15 Simulation and experimental results of DC-bus voltage after sudden increase and decrease of 3.7A DC load at 1 000r/min
在最低转速200r/min和最高转速2 000r/min下,分别突增和突减0.47A和3.7A负载,所得仿真和实验结果如图16和图17所示。总体而言,突增和突减负载下,电压的瞬态变化过程基本对称。
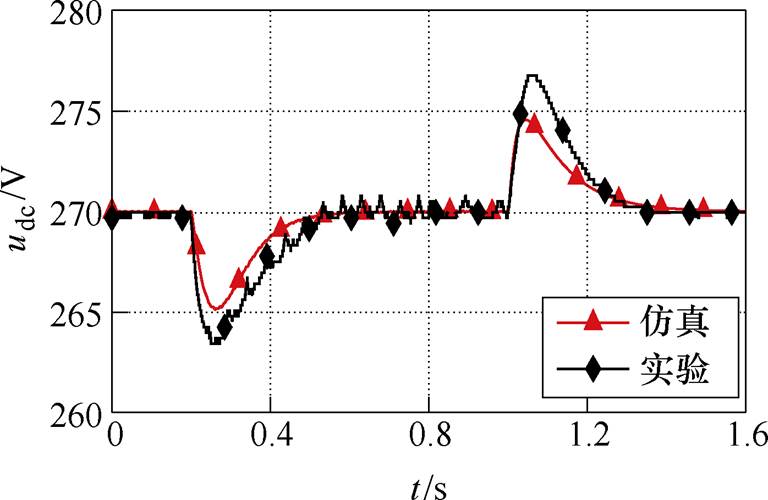
图16 200r/min时突增和突减0.47A负载后直流母线电压仿真和实验结果
Fig.16 Simulation and experimental results of DC-bus voltage after sudden increase and decrease of 0.47A DC load at 200r/min
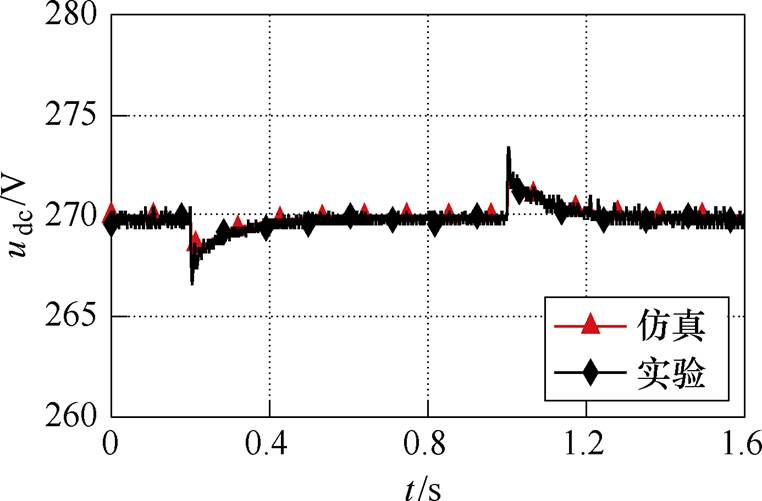
图17 2 000r/min时突增和突减3.7A负载后直流母线电压仿真和实验结果
Fig.17 Simulation and experimental results of DC-bus voltage after sudden increase and decrease of 3.7A DC load at 2 000r/min
此外,也进行了600r/min和1 500r/min转速下的突增直流负载实验(分别突加至2.2A和3.7A),相关结果连同图15~图17的结果一起表示在图18中。
由图18可知,在不同运行转速下,直流侧分别突增负载或突然卸载后,直流母线电压的动态降落均小于10V,且恢复时间在0.3s内,表明所研究的PMSG系统在全转速范围内具有良好的抗负载扰动性能,实现了稳压控制。
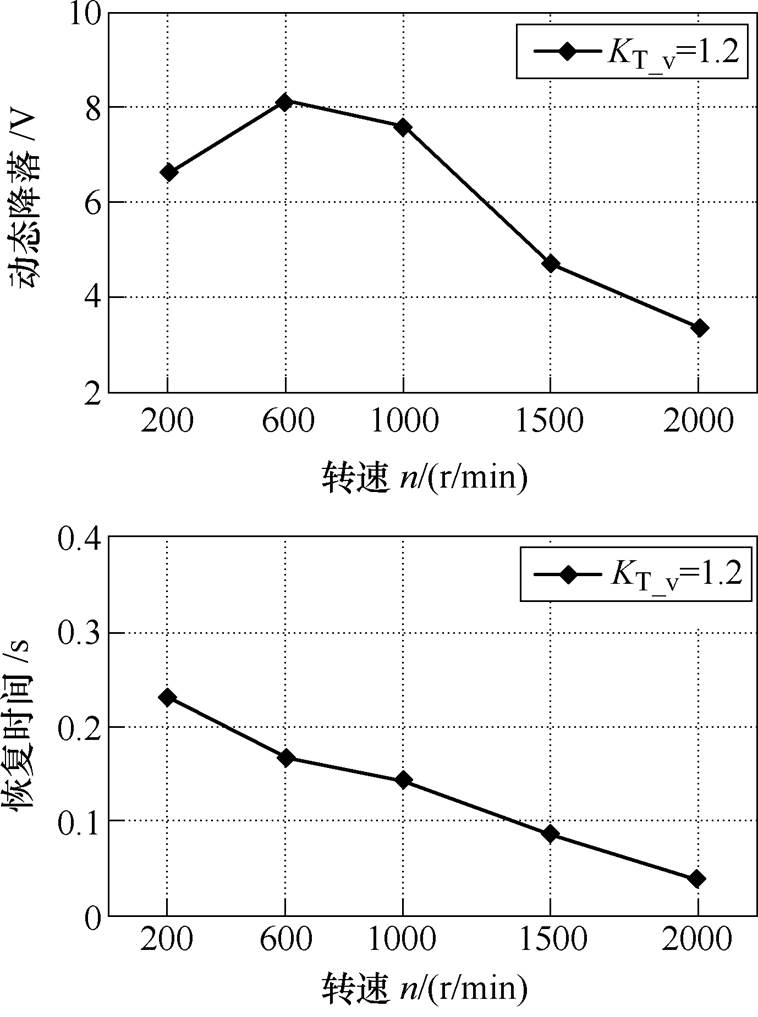
图18 不同转速下突增负载后的电压动态降落和恢复时间(KT_v=1.2)
Fig.18 Voltage dynamic drop and recovery time after sudden loading at different rotating speeds (KT_v=1.2)
本文采用PWM整流器实现了PMSG系统AC- DC稳压控制,所采用的稳压控制策略基于磁场定向控制,在传统电压电流双闭环控制的基础上,通过引入一个新的电压反馈,能够加快直流母线电压的瞬态响应速度,即增强系统的抗负载扰动能力。
同时,本文建立了适用于任意负载的系统控制模型,在此基础上推导出各环节的传递函数。而后从理论上分析了发电机转速变化对系统性能的影响,即宽转速范围PMSG系统存在较低转速下抗负载扰动能力差和较高转速下相对稳定性差的问题,这无疑会增加控制难度。
为此,本文提出了控制参数的优化方法,该方法中,将三个控制参数归结为一个控制参数KT_v来进行优化,即首先按照参数KT_v对系统性能影响的变化规律,通过仿真分析和实验验证实现KT_v的优化;然后根据相关公式得到电压调节器比例系数KP_v和积分系数KI_v。优化得到的控制参数具有如下特点:KP_v能够跟随发电机转速而实时改变,这有利于系统在全转速范围内保持快速性和稳定性;而另外两个参数KI_v和KT_v在全转速范围内保持 不变。
实验结果表明,应用优化得到的控制参数,PMSG系统在宽转速范围内具有良好的电压跟随性能和抗负载扰动性能,实现了PMSG系统的高性能稳压控制。
参考文献
[1] Chinchilla M, Arnaltes S, Burgos J C. Control of permanent-magnet generators applied to variable- speed wind-energy systems connected to the grid[J]. IEEE Transactions on Energy Conversion, 2006, 21(1): 130-135.
[2] Kendouli F, Abed K, Nabti K, et al. High per- formance PWM converter control based PMSG for variable speed wind turbine[C]//Renewable Energies and Vehicular Technology Conference, Nabeul, Tunisia, 2012: 502-507.
[3] Ovacik L, Bilgin B. Developments in voltage regulation of variable-speed PM synchronous alter- nators in automotive electric systems[C]//Inter- national Conference on Applied Electronics, Pilsen, Czech Republic, 2011: 1-6.
[4] 林珍君, 黄声华, 万山明. 一种应用于船舶轴带同步发电机变流器系统的新型PWM整流控制策略[J]. 中国电机工程学报, 2016, 36(4): 1117-1126. Lin Zhenjun, Huang Shenghua, Wan Shanming. A novel PWM rectifier control strategy applied on ship shaft synchronous generator converter system[J]. Proceedings of the CSEE, 2016, 36(4): 1117-1126.
[5] Burrow S G, Mellor P H, Churn P, et al. Sensorless operation of a permanent-magnet generator for aircraft[J]. IEEE Transactions on Industry Appli- cations, 2008, 44(1): 101-107.
[6] Shen Jianxin, Miao Dongmin. Machine design and control strategy for wide-speed-range PMSG systems[J]. COMPEL: The International Journal for Computation and Mathematics in Electrical and Electronic Engineering, 2015, 34(1): 92-109.
[7] 沈建新, 缪冬敏. 变速永磁同步发电机系统及控制策略[J]. 电工技术学报, 2013, 28(3): 1-8.
Shen Jianxin, Miao Dongmin. Variable speed permanent magnet synchronous generator systems and control strategies[J]. Transactions of China Elec- trotechnical Society, 2013, 28(3): 1-8.
[8] Miao Dongmin, Shen Jianxin. Simulation and analysis of a variable speed permanent magnet synchronous generator with flux weakening control[C]// International Conference on Renewable Energy Research and Applications (ICRERA), Nagasaki, Japan, 2012: 1-6.
[9] Malinowski M, Kazmierkowski M P, Trzynadlowski A M. A comparative study of control techniques for PWM rectifiers in AC adjustable speed drives[J]. IEEE Transactions on Power Electronics, 2003, 18(6): 1390-1396.
[10] Malinowski M, Kazmierkowski M P, Hansen S, et al. Virtual-flux-based direct power control of three- phase PWM rectifiers[J]. IEEE Transactions on Industry Applications, 2001, 37(4): 1019-1027.
[11] Zhi Dawei, Xu Lie, Williams B W. Improved direct power control of grid-connected DC-AC con- verters[J]. IEEE Transactions on Power Electronics, 2009, 24(5): 1280-1292.
[12] Amin M M N, Mohammed O A. DC-bus voltage control technique for parallel-integrated permanent magnet wind generation systems[J]. IEEE Transa- ctions on Energy Conversion, 2011, 26(4): 1140-1150.
[13] Wang Yu, Deng Zhiquan, Wang Xiaolin. A parallel hybrid excitation flux-switching generator dc power system based on direct torque linear control[J]. IEEE Transactions on Energy Conversion, 2012, 27(2): 308-317.
[14] Miao Dongmin, Yves Mollet, Johan Gyselinck, et al. DC voltage control of a wide-speed-range permanent- magnet synchronous generator system for more electric aircraft applications[C]//Proceedings of the 13th IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 2016: 1-6.
[15] Miao Dongmin, Yves Mollet, Shen Jianxin. Direct voltage field-oriented control for permanent-magnet synchronous generator systems with an active recti- fier[C]//Proceedings of IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 2016: 1-6.
[16] Miao Dongmin, Shen Jianxin. Direct voltage control strategies for variable-speed permanent magnet synchronous generator system[C]//10th International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, 2015: 1-6.
[17] Krishnan R. Permanent magnet synchronous and brushless DC motor drives[M]. New York: CRC Press, 2010: 279-328.
[18] 阮毅, 陈伯时. 电力拖动自动控制系统: 运动控制系统[M]. 4版. 北京: 机械工业出版社, 2009.
Voltage Stabilization Control and Parameters Optimization for Wide-Speed-Range Permanent Magnet Synchronous Generator Systems
Abstract Permanent magnet synchronous generator (PMSG) system consists of the PMSG itself and a power converter. Pulse width modulation (PWM) rectifier control methodology for the PMSG system with wide- speed-range operation and DC load is studied in this paper. By establishing the small signal analysis model of the PMSG and the transfer function of the PWM rectifier, the influence of control parameters on the system performance is analyzed, and the optimization method of the control parameters is achieved. The system model is verified by simulation and experimental results. It is shown that due to the application of the optimized control parameters, the PMSG system has a good voltage follow performance and anti-load-disturbance ability over a wide speed range of 200~2000r/min, and realizes high-performance voltage regulation.
keywords:Permanent magnet synchronous generator, wide-speed-range operation, voltage stabilization, control parameters optimization
中图分类号:TM351
DOI: 10.19595/j.cnki.1 000-6753.tces.190194
国家自然科学基金(51577165,51690182,51837010)和中央高校基本科研业务费专项资金(2018QNA4020)资助。
收稿日期2019-02-28
改稿日期 2019-05-15
甘志伟 男,1993年生,硕士研究生,研究方向为永磁同步发电机稳压控制。E-mail: WillGan@126.com
沈建新 男,1969年生,教授,博士生导师,研究方向为永磁同步电机及其控制、高速电机系统等。E-mail: J_X_Shen@zju.edu.cn(通信作者)
(编辑 赵 鹏)