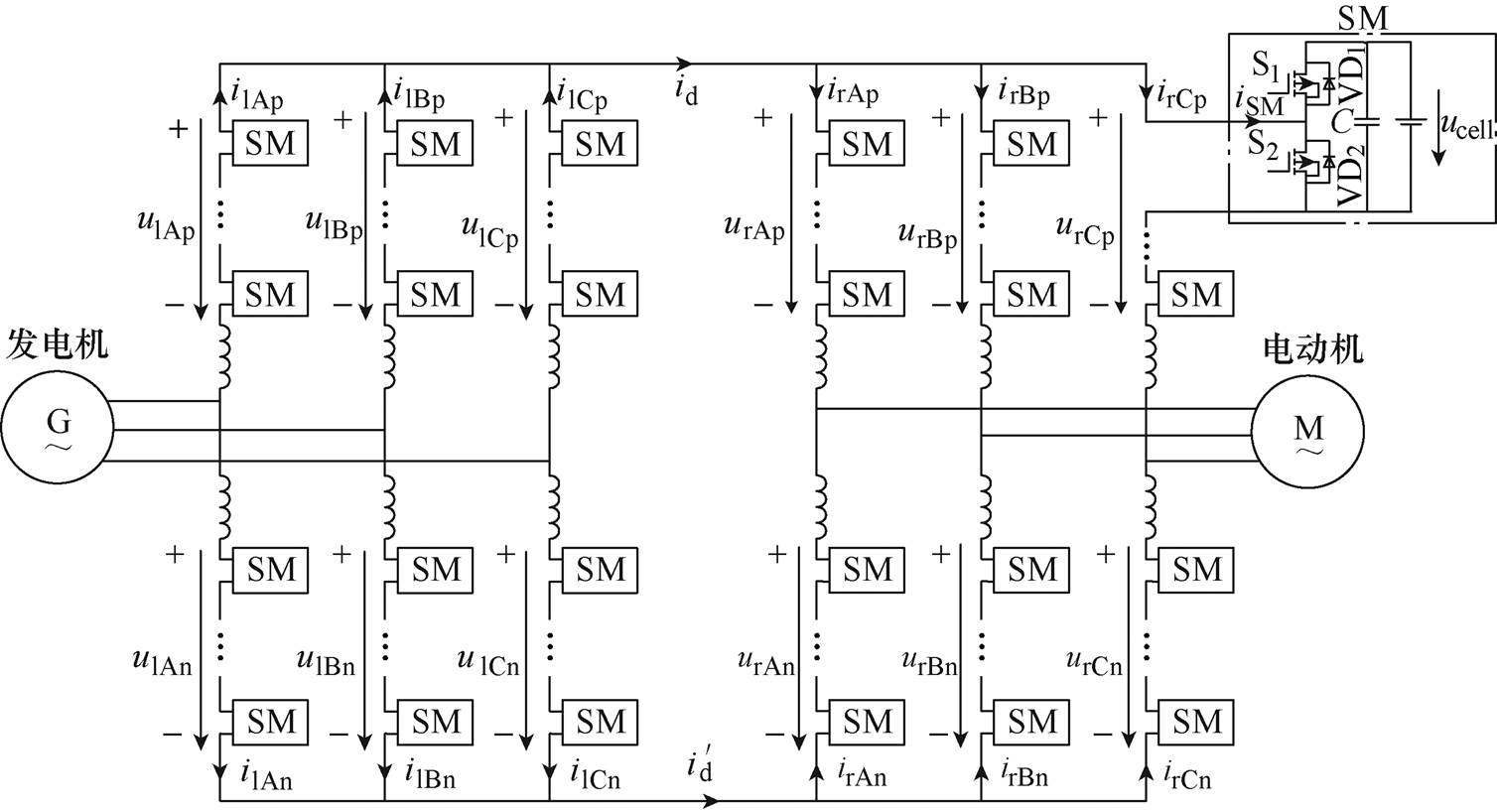
图1 BMMC-HEV拓扑
Fig.1 BMMC-HEV topology
摘要 针对带独立发电机的混联式插电式混合电动汽车(PHEV),该文提出一种基于“背靠背”模块化多电平变换器(MMC)的一体化功率变换器拓扑及其外接单相交流电源充电控制方案。该方案利用MMC拓扑模块化结构的优势,分析了拓扑工作在单相交流充电模式下各桥臂、子模块的功率流向等特点,基于载波相移正弦脉冲宽度调制,提出适用于该控制策略的正弦半波调制方法,采用基于桥臂电流控制的电池荷电状态(SOC)层次化均衡策略,无需额外的充电电路以及复杂的电池管理系统(BMS),可实现各电池单元的快速均衡充电,避免因单体电池差异引起的整体储能系统循环寿命缩减。通过Simulink仿真及RT-LAB实时仿真器硬件在环实验,验证了该变换器的可行性和充电控制策略的有效性。
关键词:插电式混合电动汽车 模块化多电平变换器 电池荷电状态均衡充电 桥臂电流控制 分层控制
在燃油汽车向电动汽车(Electric Vehicle, EV)转变的进程中,插电式混合电动汽车(Plug-in Hybrid Electric Vehicle, PHEV)兼备零排放的运行工况和续航久的优点,在混联式的结构下能够在发动机和电动机混合驱动模式下带动发电机为电池充电,在当下动力电池技术受限,充电桩设施不完善的情况下,不失为该进程中一种很好的过渡选择[1-7]。
对于混合电动汽车的车载变换器,目前多采用传统两电平背靠背变换器拓扑,但该方案需要额外的电池管理系统(Battery Management System, BMS)[8]。针对车载功率变换器拓扑,国内外专家学者进行了很多研究,其中文献[8-10]提出利用H桥级联多电平技术结合DC-DC变换器对动力电池模块进行能量管理,并引入高、中频变压器结构,将BMS系统结合在车载变换器中,提高了电池组的使用寿命和安全可靠性,适用于多种电动汽车。文献[11-13]提出利用模块化多电平变换器(Modular Multilevel Converter, MMC)作为车载变换器,该一体化拓扑可同时实现BMS、EV电机驱动、电池充电等功能的系统集成。文献[13]对包括开关电容型在内的十几种现有BMS拓扑的各种性能与MMC拓扑进行了对比,结果表明,基于MMC的BMS在体积、成本、均衡时间及效率等方面具有一定的优势,并且该拓扑具有电池故障隔离及故障冗余处理能力,更重要的是该拓扑采用同一个变换器实现电机驱动和充/放电,而不需增加额外硬件。此外,由于该方法采用级联模块化拓扑结构,可采用低压开关器件和较低的开关频率,具有较低的开关损耗,因此,相比两电平变换器,其输出电压和电流具有较低的波形谐波畸变率、dU/dt和电磁干扰(Electromagnetic Interface, EMI),在一定程度上能减少电机谐波损耗。但该拓扑只能提供一个三相交流端口,无法用于带独立发电机的混联式PHEV车载变换器系统。
能够通过外接电源进行充电是PHEV区别于传统混合动力汽车的一个显著优势,因此充电系统中用来实现电池荷电状态(State of Charge, SOC)均衡的BMS便是不可或缺的一部分[14-17]。目前多数动力电池通常采用多个单体电池串联的形式供电,这就面临电池个体差异所带来的电池过充过放现象,降低了电池的使用效率,影响了电池组的循环寿命[18-19]。因此,通常需要昂贵而复杂的BMS系统来保证电池组的SOC均衡以及车辆的安全运行。国内外学者针对这一问题提出了很多被动或主动均衡电池SOC的策略[18, 20-25]。文献[23]针对由多个单体电池串联而成的动力电池组的均衡充电控制策略进行了研究,提出了一种在单体电池上通过开关并联电阻,从而调节单体电池充电电流的耗散型均衡充电控制策略。该方法能够消除单体电池不一致对电池组循环寿命的影响,提高电池组的充电速度。文献[24]提出一种利用动力电池组总能量给能量低的单体电池进行电能补充的主动均衡充电策略,该方法需要先将总电池组电压进行降压处理,然后对选中的单体电池进行均衡充电,与传统的耗散型均衡策略相比具有较高的效率,但不可避免地引入了变压器结构。文献[25]基于车载MMC变换器拓扑,提出一种主动电池充电的均衡控制策略,证明了该策略可以在最差的电池SOC不均衡状态进行有效调节,但该方案只适用于具有单台电机的电动汽车,不能解决混联式PHEV的充电问题。
综合现有研究成果和存在的上述问题,以及混联式PHEV自身结构特点,本文提出了一种基于“背靠背”MMC的PHEV新型一体化功率变换器拓扑(Back-to-back MMC-Hybrid Electric Vehicle, BMMC- HEV)及其动力电池充电策略。该拓扑的两个三相交流端口可分别连接发电机和驱动电机,无需额外的中间变换器环节,BMMC-HEV既担任电机驱动系统,又可直接用于PHEV的单相交流充电模式,无需额外的充电电路,有利于整车一体化设计,提高变换器功率密度。提出的基于层次化控制的动力电池充电策略,结合了该拓扑的优势,无需复杂的BMS系统,能有效实现各电池单元的SOC均衡控制。
本文所提出的BMMC-HEV拓扑结构如图1所示,其中子模块(Sub Module, SM)包含半桥结构以及与之并联的电容和电化学电池,电容元件起到滤除电压高频纹波的作用,电化学电池为储能元件。由于子模块所并联电池的电压较低,因此半桥中的开关管可选择耐压较低、开关速度较快的金属氧化物半导体场效应晶体管(MOSFET),从而可降低开关和导通损耗;图中各相桥臂通过电抗器与电机定子绕组连接,但对于如高转矩永磁轮毂电机等常用电机的定子绕组,其电感参数可满足桥臂电抗器电感值的设计要求[26-27],因此可将电机每相定子绕组分裂为两相,分别与对应每相MMC结构的上、下桥臂直接相连,以代替传统MMC拓扑中桥臂电抗器,减轻变换器质量和体积,提高车辆一体化程度。本文将BMMC-HEV拓扑用于外接单相交流充电的控制策略,采用了将电机定子绕组复用作电抗器的连接方式,如图2所示。图2中,双箭头表示插电接口,其中两个电机定子绕组的中性点直接与外接单相充电电源的两端相连。为便于分析,本文将各桥臂按照xyz进行标号,其中x=l, r,l表示拓扑中的左侧MMC,r表示右侧MMC结构;y=A, B, C,分别表示MMC结构对应的三相桥臂;z=p, n,分别表示MMC结构中的上桥臂和下桥臂。下文中,桥臂电流、电压、平均SOC值的下标均采用此标号 规则。
当拓扑工作在电机驱动状态时,由DC-AC侧MMC通过三相交流输出端口驱动电动机运行,所需功率由两侧MMC的动力电池共同提供,同时可通过混联式PHEV中的发动机带动电动机,由AC-DC侧MMC通过三相交流输入端口对动力电池进行充电。两侧MMC之间的功率流动通过母线实现。当拓扑工作在单相交流充电状态时,以发电机/电动机不产生转矩为原则,将电源两端分别接在两个电机定子绕组的中性点,对动力电池进行充电,由于此时各相电压电流为同相位状态,故两侧MMC没有工作在交直流变换状态,母线仅起到连接作用,不提供直流电压支撑。限于篇幅,本文仅研究外接电源对车载电池的充电控制策略。
图1 BMMC-HEV拓扑
Fig.1 BMMC-HEV topology
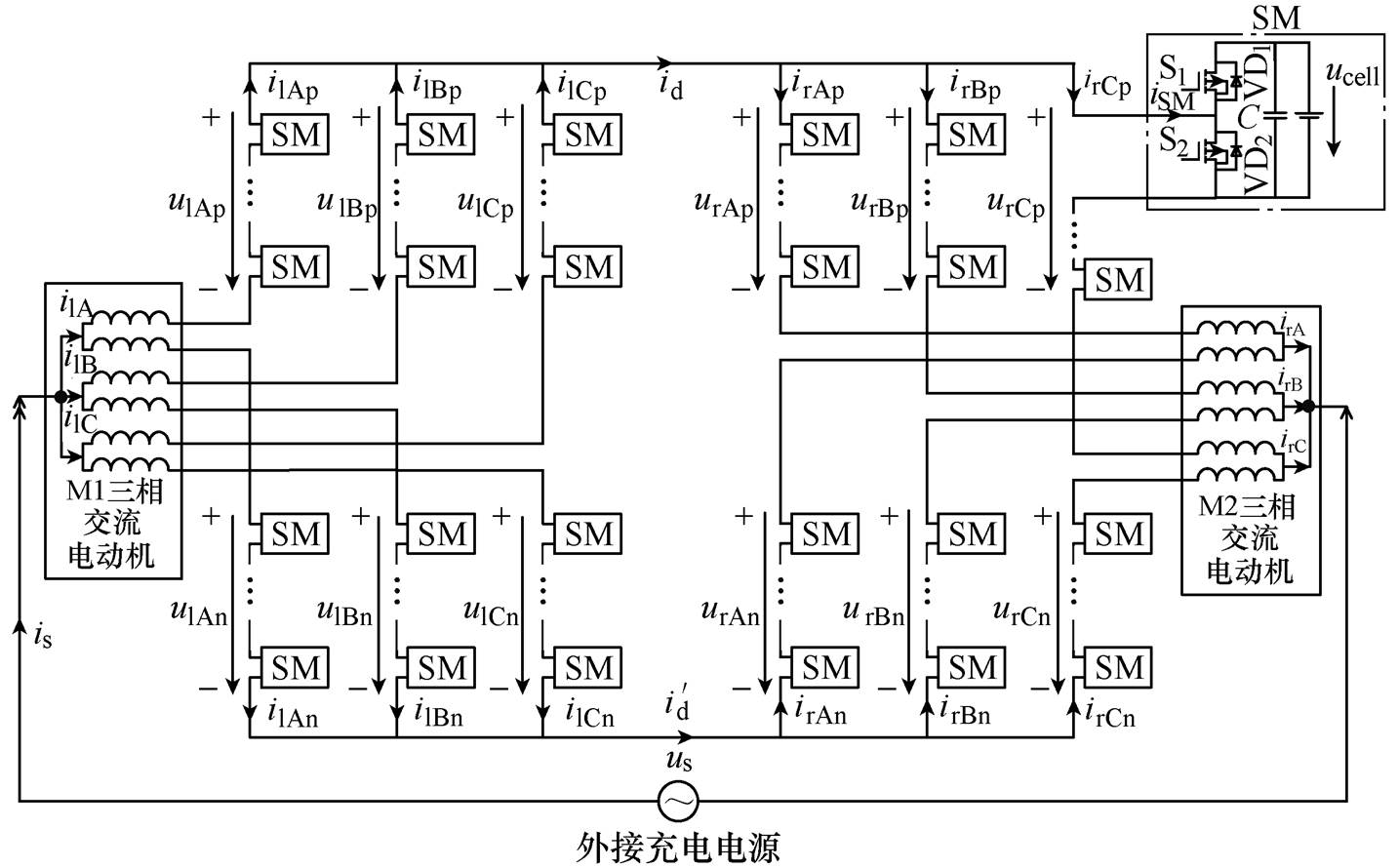
图2 BMMC-HEV拓扑结构及外接电源充电连接
Fig.2 BMMC-HEV topology and external power supply charging connection diagram
由于本文所提出的拓扑中子模块采用半桥结构,故子模块电压为单极性。以左侧MMC的A相上桥臂为例,在脉冲宽度调制(Pulse Width Modu- lation, PWM)下,其端电压为包含正弦分量的直流电压;而桥臂电流由相电流分流得到,为正弦交流量。于是,当A相上桥臂电流ilAp与端电压ulAp处于实际方向相同的半个电流周期中,桥臂吸收功率为正;处于实际方向相反的半个周期中,吸收功率为负。桥臂吸收功率为负的半个电流周期实际上是动力电池向单相交流电源回馈能量的过程,这将导致系统充电效率和电源功率因数降低。因此,若使桥臂仅在吸收功率的半个周期处于投入状态,而在另外半个周期退出(使桥臂电压为零),就可以实现一个周期内桥臂的发出功率为零,即本文所提出的层次化半波充电控制策略。该充电策略通过PWM信号调节各子模块输出电压,使上、下桥臂跟随外接交流电源的变化,分别工作在半个工频周期内,互补组成交流端口的正弦交流电压。桥臂电流由相电流分流得到,为交流量。
本文在改进载波相移调制基础上[28],提出用于层次化半波充电策略的调制方法,使每个桥臂仅工作在吸收功率的半个工频周期内。图3所示为一个子模块的载波与调制波比较产生开关S1控制信号的示意图,图中调制波为仅保留半个周期的工频正弦波。可以看到,子模块仅在调制波为正的半个周期内具有S1开关的开通信号,剩余半个周期开关S1为常闭状态,S2为常开状态,子模块处于退出运行状态。由移相载波调制的原理可知,同一桥臂各子模块共用相同的调制波,因此可以实现整个桥臂仅在半个工频周期内处于投入状态,而上下桥臂的调制波相位相差180°,这样可以保证MMC三相交流端口的电压波形为具有直流偏置的正弦波形。
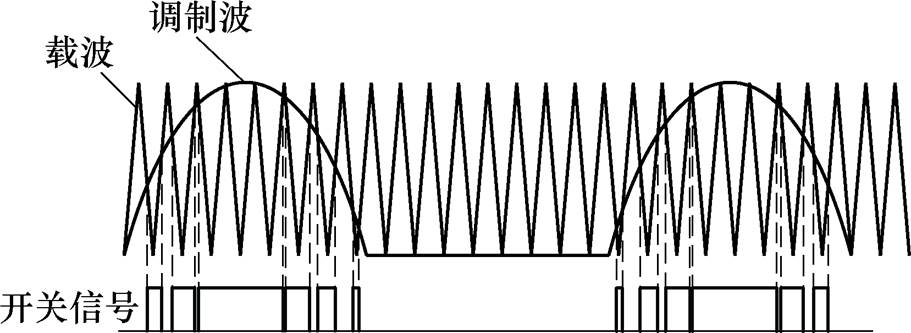
图3 子模块开关S1调制信号
Fig.3 Submodule switch S1 modulation signal
针对BMMC-HEV拓扑提出的层次化半波充电控制策略框图如图4所示,该策略以桥臂电流控制为核心,采取分层SOC均衡策略,具体包括同一桥臂内各子模块电池SOC均衡控制、上下桥臂SOC均衡控制、左右桥臂SOC均衡控制以及相间桥臂SOC均衡控制。图中, 为桥臂电流给定值,
为桥臂电流给定值, 为公共占空比。
为公共占空比。
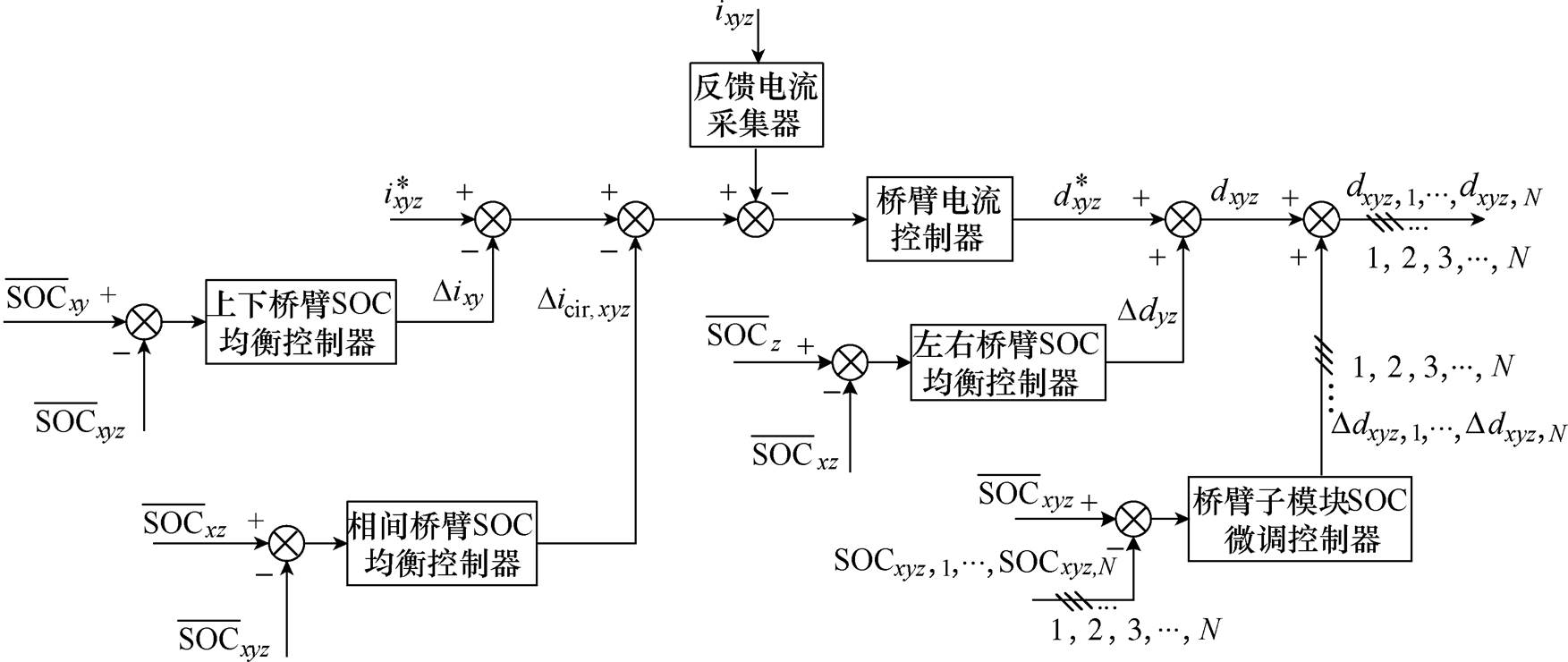
图4 SOC均衡层次化控制框图
Fig.4 Block diagram of SOC equalization hierarchical control
在充电过程中由于电池端电压变化慢,对电池吸收功率的调节作用较小,因此本文采用桥臂电流控制策略[29],利用桥臂间环流,能有效提高电池模块SOC均衡速度。桥臂电流控制器框图如图5所示。基于所提出的层次化半波充电控制策略,每个桥臂充电功率的调节只与其处于投入状态的桥臂电流有关,因此在闭环控制中,只需将此半个周期的桥臂电流反馈即可。
图5中反馈电流采集器用来采集桥臂处于投入状态的半波桥臂电流,并进行波形补全后参与桥臂电流反馈调节; 为桥臂的PWM静态占空比;开关信号选择模块则用来实现图3所示的载波相移调制方式,即通过桥臂所处的功率状态加以判断,使桥臂电流控制器仅输出半个工频周期的占空比,从而控制桥臂仅投入在功率吸收状态的半个周期。
为桥臂的PWM静态占空比;开关信号选择模块则用来实现图3所示的载波相移调制方式,即通过桥臂所处的功率状态加以判断,使桥臂电流控制器仅输出半个工频周期的占空比,从而控制桥臂仅投入在功率吸收状态的半个周期。
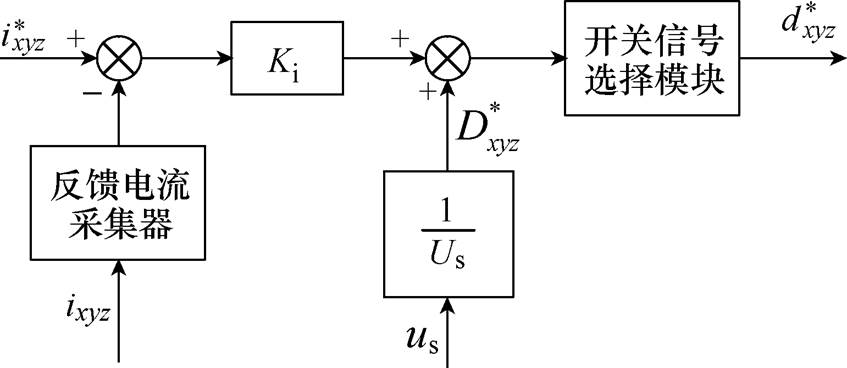
图5 桥臂电流控制器框图
Fig.5 Block diagram of arm current controller
每个子模块中电池元件的SOC计算方法采用目前应用较广的安时积分法[13]。
 (1)
(1)式中,h= ;
; 为每个子模块电池的初始SOC;
为每个子模块电池的初始SOC; 为电池的额定容量;
为电池的额定容量; 为流过子模块电池的电流瞬时值。
为流过子模块电池的电流瞬时值。
通过计算得到每个子模块电池的荷电状态 ,容易得到各桥臂的SOC均值
,容易得到各桥臂的SOC均值 为
为
 (2)
(2)将 与
与 进行比较,通过桥臂子模块SOC微调控制器,可以得到每个子模块开关管对应的占空比增量
进行比较,通过桥臂子模块SOC微调控制器,可以得到每个子模块开关管对应的占空比增量 ,与桥臂公共占空比
,与桥臂公共占空比 叠加,可以调节各个子模块投入的时间,从而调节各子模块SOC增速,达到同一桥臂内各子模块SOC均衡的目的。
叠加,可以调节各个子模块投入的时间,从而调节各子模块SOC增速,达到同一桥臂内各子模块SOC均衡的目的。
根据层次化半波充电策略要求,结合图2各桥臂电压电流参考方向,将总是处于同步投入状态的各相左侧MMC上(下)桥臂与右侧MMC下(上)桥臂作为一个控制单元,如图4中所示,将参与调节的上、下两桥臂SOC均值 与其中一个桥臂的进行比较,通过上、下桥臂SOC均衡控制器输出电流增量
与其中一个桥臂的进行比较,通过上、下桥臂SOC均衡控制器输出电流增量 ,改变对应桥臂电流参考值,从而调节各桥臂SOC增长速度,达到SOC均衡目的。由于参与调节的两桥臂共用一个上下桥臂SOC均衡控制器,因此二者电流增量之和为零,不会对充电电源电流及总吸收功率造成影响。
,改变对应桥臂电流参考值,从而调节各桥臂SOC增长速度,达到SOC均衡目的。由于参与调节的两桥臂共用一个上下桥臂SOC均衡控制器,因此二者电流增量之和为零,不会对充电电源电流及总吸收功率造成影响。
上述上、下桥臂SOC均值可以表示为
 (3)
(3)式中,当下标 时
时 ;当
;当 时
时 。
。
以A相为例,其上桥臂的充电等效简化电路如图6所示,其中Z为左右两桥臂的等效阻抗,主要由桥臂电抗器的阻抗构成, 为流过lAp桥臂的电流为
为流过lAp桥臂的电流为
 (4)
(4)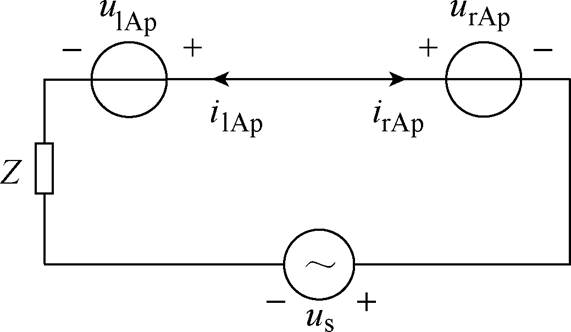
图6 A相上桥臂的等效简化电路
Fig.6 Equivalent simplified circuit of the upper arm of phase A
若左右桥臂平均SOC均衡,当lAp桥臂处于投入状态,rAp桥臂应处于退出状态,即 =0。当
=0。当 时,通过给rAp桥臂叠加占空比增量,使
时,通过给rAp桥臂叠加占空比增量,使 ,从而提高lAp桥臂电流,加快
,从而提高lAp桥臂电流,加快 的增速;同时,在lAp桥臂叠加相反的占空比增量,增加lAp各子模块投入时间,使其SOC增速加快。
的增速;同时,在lAp桥臂叠加相反的占空比增量,增加lAp各子模块投入时间,使其SOC增速加快。
从功率的角度看,图6中的功率平衡表达式为
 (5)
(5)左右桥臂SOC均衡控制策略的加入,将导致rAp桥臂输出功率,增加外接电源输出功率,从而增加lAp桥臂吸收功率,增速加快, 增速放缓。
增速放缓。
上述原理推广到三相,如图4所示,将两侧MMC的三相上(下)桥臂SOC平均值 和
和 分别与上(下)桥臂SOC总平均值
分别与上(下)桥臂SOC总平均值 进行比较,通过左右桥臂SOC均衡控制器得到占空比增量
进行比较,通过左右桥臂SOC均衡控制器得到占空比增量 ,叠加于各桥臂原始占空比,从而调节左右桥臂SOC的均衡。其中、和可由式(6)求得
,叠加于各桥臂原始占空比,从而调节左右桥臂SOC的均衡。其中、和可由式(6)求得
 (6)
(6) (7)
(7)
当BMMC-HEV各桥臂之间仅存在相间SOC不均衡,左侧MMC三相上桥臂进行充电时的等效简化电路如图7所示。图中,ZA、ZB、ZC为对应桥臂的等效阻抗,Zr为右侧MMC三相上桥臂的等效阻抗。从图中可见,桥臂电流中包括仅流动在三相之间的环流 ,即
,即
 (8)
(8)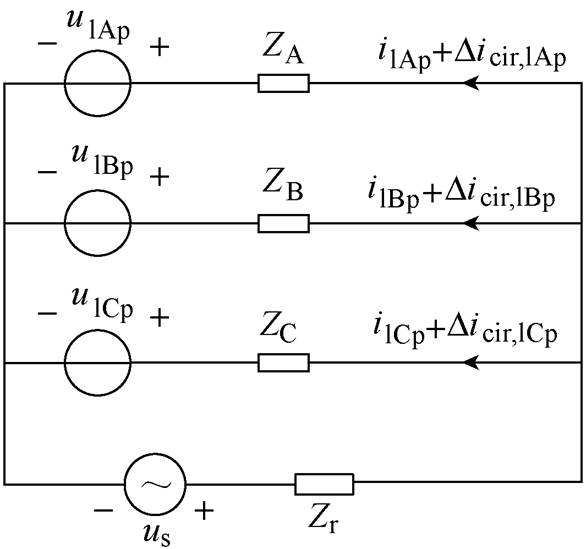
图7 左侧MMC上桥臂等效简化电路
Fig.7 Equivalent simplified circuit of the left MMC upper arm
这样可以保证相间桥臂SOC均衡不会影响其他桥臂正常工作,利用环流改变各桥臂参考电流、吸收功率,从而调节其SOC均衡。各相桥臂的环流大小的获得方法如图4所示,通过将A、B两相桥臂的SOC均值与三相上(或下)桥臂SOC均值 进行比较,然后通过三相桥臂SOC均衡控制器,得到相应的桥臂环流,再利用环流之间的约束关系,得到C相的桥臂环流。
进行比较,然后通过三相桥臂SOC均衡控制器,得到相应的桥臂环流,再利用环流之间的约束关系,得到C相的桥臂环流。
为验证BMMC-PHEV拓扑的动力电池层次化半波充电策略的有效性,在Matlab/Simulink仿真环境下搭建了仿真模型。模型中测量电压、电流的参考方向与图2中一致,为非关联参考方向,即测量的桥臂电压、电流波形方向相反时为桥臂吸收功率状态。模型中子模块储能元件采用额定电压为36V,额定容量为30A·h的锂离子电池模块;每个桥臂子模块数N=10;用于模拟电机定子绕组的桥臂电抗器L=5mH;外接有效值为220V的工频单相交流电压源;流过电源的额定充电电流为30A;等效开关频率为20kHz。
工况1:各电池模块SOC=50%,电池SOC整体处于均衡状态。lAp桥臂的电压电流波形以及lAp和lAn桥臂的电压波形如图8所示。可以看出,lAp桥臂仅在半个工频周期内处于投入状态,根据电压电流参考方向可判断该半个周期内桥臂为吸收功率状态,而另外半个工频周期内,桥臂电压值为零,无功率发出。从lAp和lAn的桥臂电压波形可以看到,上下桥臂电压互补,可以保证MMC交流端口输出交流电压波形。图9为单相交流充电模式下的电源电压、电流波形及其局部放大图,可以看到电流谐波较少,且电源几乎工作在单位功率因数状态。
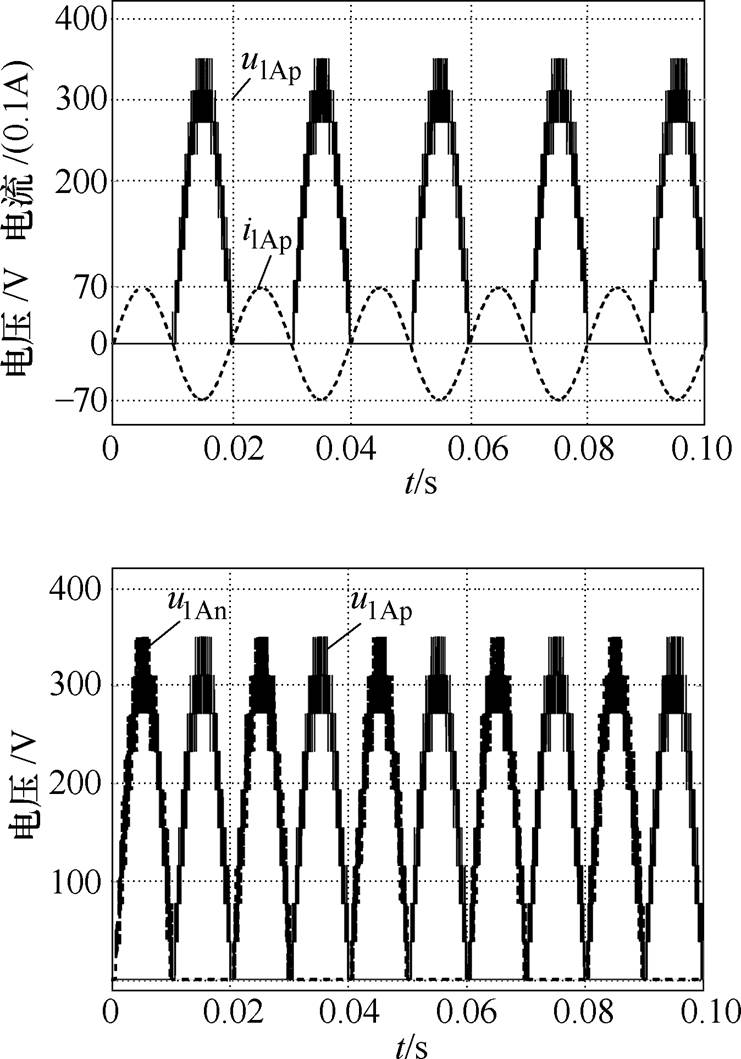
图8 工况1:桥臂电压、电流波形
Fig.8 Arm voltage and current waveforms in Condition 1
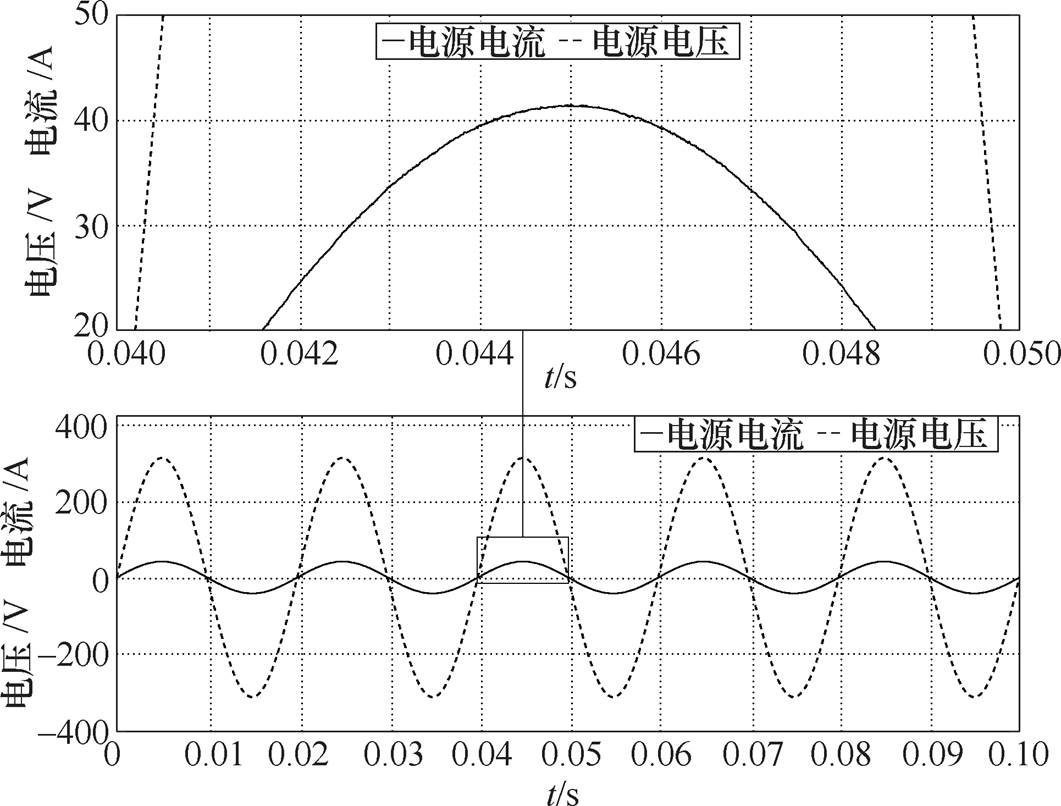
图9 工况1:电源电压、电流波形
Fig.9 Power voltage and current waveforms in Condition 1
工况2:变换器上桥臂各子模块电池SOC=50%,下桥臂各子模块电池SOC=60%,工作于上下桥臂SOC不均衡状态。图10所示为工作在该工况下的lAp和rAn桥臂的电流波形,根据参与调节的上下桥臂平均SOC的不平衡程度,其桥臂电流参考值加入了对应的电流增量,但二者电流增量之和为零,不会影响电源电流的波形。
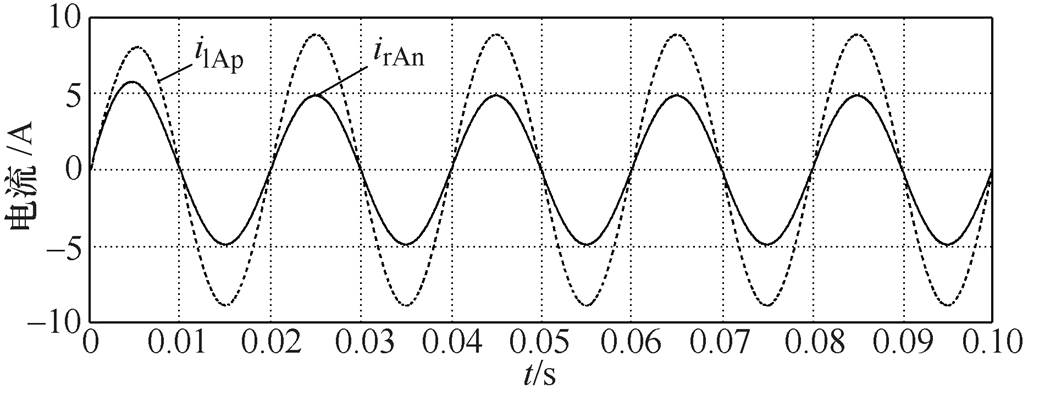
图10 工况2:桥臂电流波形
Fig.10 Arm current waveforms in Condition 2
工况3:变换器A相桥臂各子模块电池SOC= 40%,B相桥臂各子模块电池SOC=50%,C相桥臂各子模块SOC=60%,工作于相间SOC不均衡状态。图11所示为变换器左侧MMC上桥臂参与相间桥臂SOC均衡调节时的桥臂电流波形,可以看到,在桥臂投入的桥臂电流负半周期,根据SOC的不均衡程度分别加入了对应的电流增量,而三者之和保持与均衡状态时相同,即环流仅在参与调节的三个桥臂之间流动,不会影响到电源电流的值。同时,桥臂处于退出状态时的半个周期电流波形不受影响,保证了不同三相桥臂相间SOC均衡的独立性。
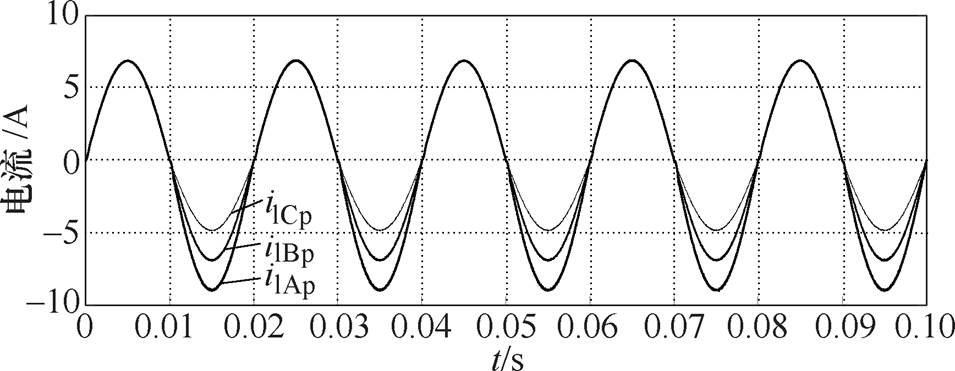
图11 工况3:桥臂电流波形
Fig.11 Arm current waveforms in Condition 3
工况4:变换器左侧MMC各桥臂中各子模块电池SOC=50%,右侧MMC各桥臂各子模块电池SOC=60%,工作于左右桥臂SOC不均衡状态。如图12所示,经左右桥臂均衡控制策略的调整,SOC较高的右侧桥臂处于投入状态时的电压值较低,桥臂电流也相应减小,剩余半个周期内桥臂电压不为零,处于功率发出状态,从而相应地提高了左侧桥臂投入的半个周期的桥臂电流,即提高左侧桥臂的吸收功率,减小右侧桥臂吸收功率,从而达到两者SOC均衡的目的。
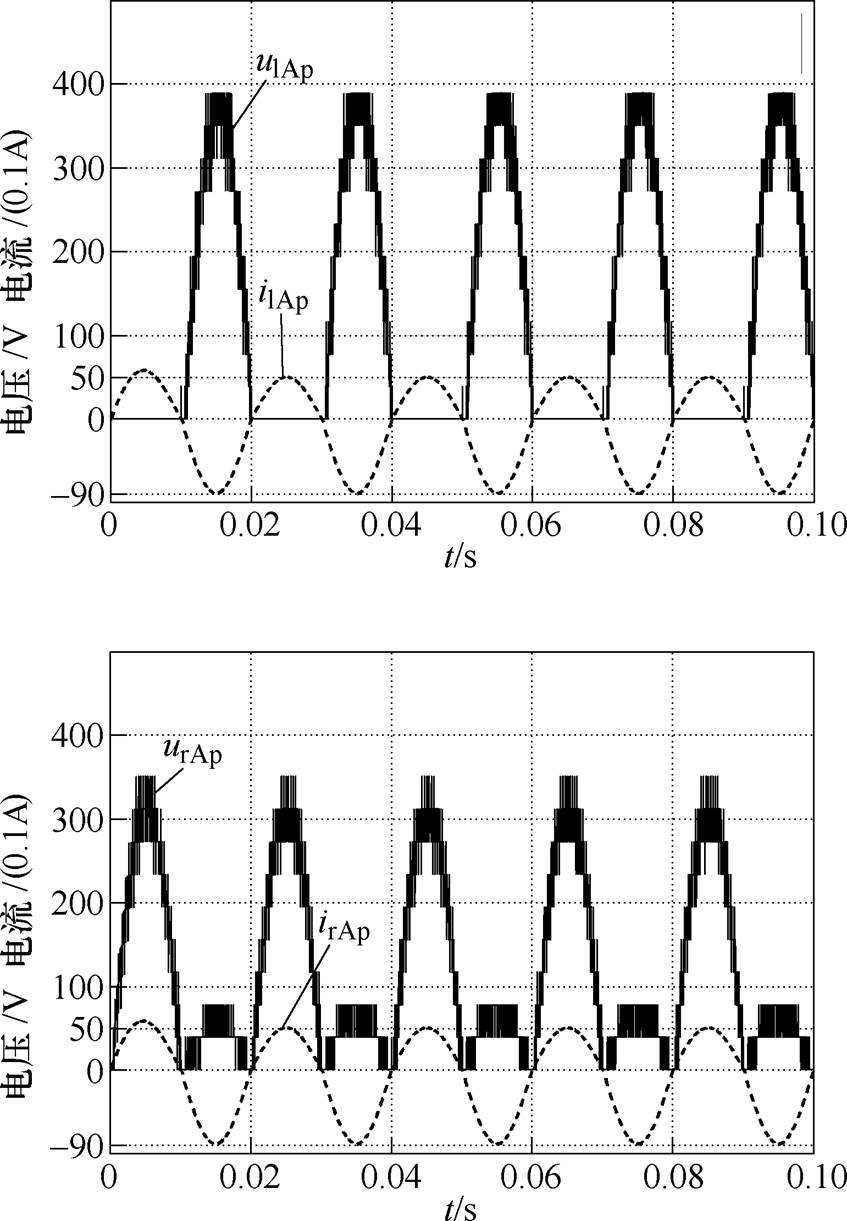
图12 工况4:桥臂电压、电流波形
Fig.12 Arm voltage and current waveforms in Condition 4
工况5:各桥臂的平均SOC值见表1,电路中各电池模块工作在最坏的不平衡状态。
表1 工况5:各桥臂初始平均SOC
Tab.1 Initial average SOC of each arm in Condition 5

左侧桥臂SOC(%)右侧桥臂SOC(%) lAp32rAp36 lAn34rAn38 lBp40rBp44 lBn42rBn46 lCp48rCp52 lCn50rCn54
图13为工况5下lAp和rAn的桥臂电流,两者所投入的负半周期的电流大小关系满足对应的SOC大小关系,即具有较小平均SOC的桥臂,电流值较大。图14为lAp、lBp以及lCp的电流波形,同样负半周期各电流大小满足三相SOC均衡调节的需求。
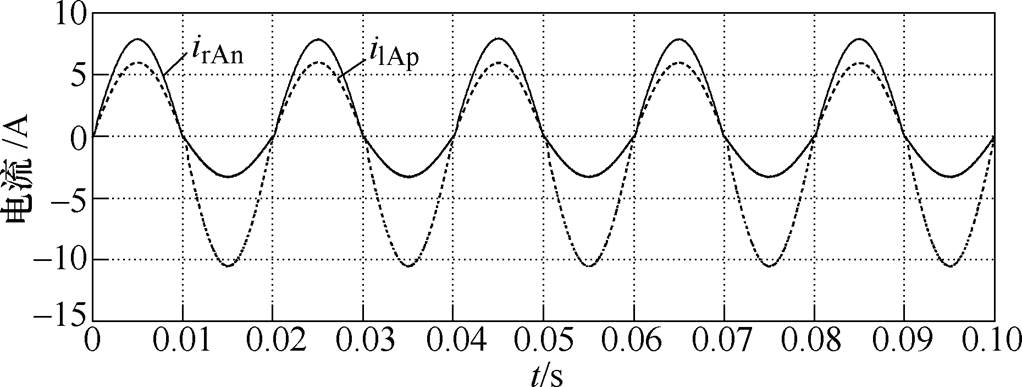
图13 仿真工况5:上、下桥臂电流波形
Fig.13 Upper and lower arm current waveforms in simulation condition 5
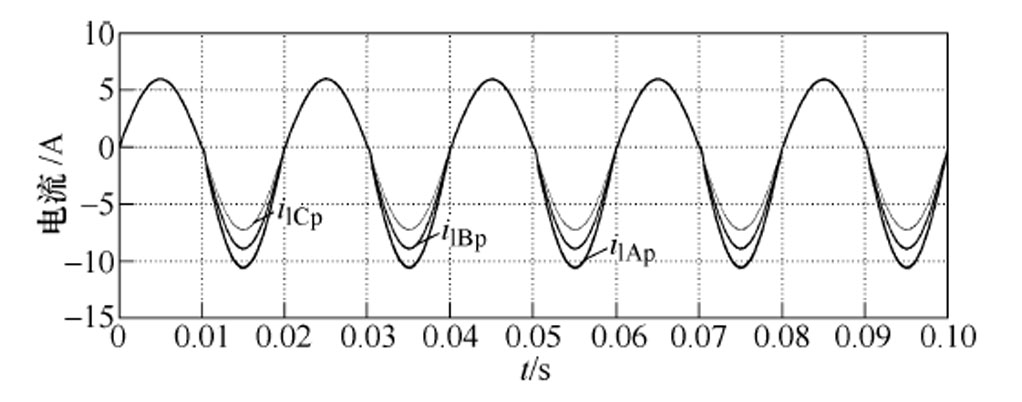
图14 仿真工况5:三相桥臂电流波形
Fig.14 Arm current waveforms of three phases in simulation condition 5
图15为rAp桥臂电压波形,可见其处于投入状态的半个周期所呈现的多电平电压波形,以及左右桥臂SOC均衡策略所产生的放电周期的电压波形。
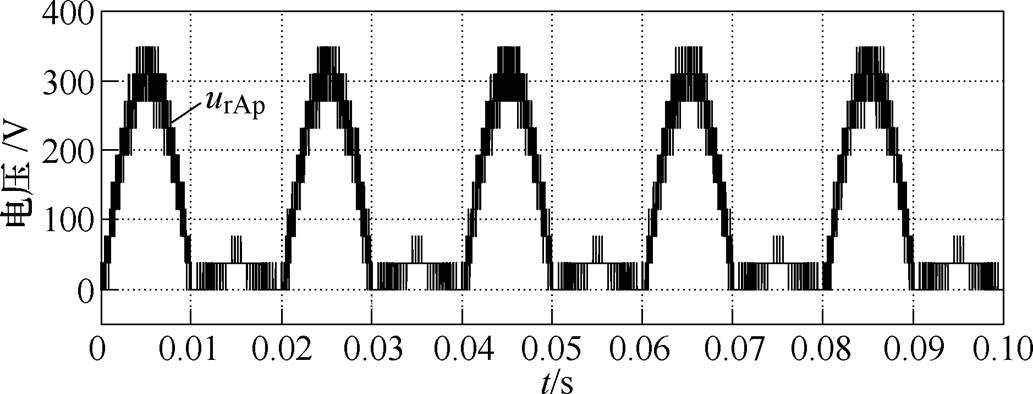
图15 仿真工况5:桥臂电压波形
Fig.15 Arm voltage waveform in simulation condition 5
采用两台型号为OP5600的RT-LAB实时仿真器平台所搭建的硬件在环电路,进一步验证所提出的层次化半波充电策略的有效性。其中,利用1号RT-LAB模拟主电路,用于控制电路的各SOC和电流、电压变量通过模拟量输出板卡输出,通过数字输入板卡得到各开关管的开关信号;利用2号RT-LAB内部的CPU以及型号为OP5142的FPGA作为控制部分,接受1号机所提供的模拟信号,并输出数字控制信号用于主电路开关管。
主电路各电量的参考方向同图2,子模块电池仍选用锂电池模型,额定容量为3 000mA·h,额定电压为3.6V;每个桥臂子模块数N=3;用于模拟电机定子绕组的桥臂电抗器L=5mH;外接幅值为10V的工频单相交流电源;电池充电电流有效值为0.7C=2.12A;控制电路等效开关频率为20kHz。
RT-LAB测试实验采取仿真中的工况5,各桥臂子模块平均SOC见表1。由示波器观测的相应桥臂电压、电流波形如图16~图18所示,可以看到与Simulink仿真中的波形具有相同的SOC均衡作用。各桥臂的平均SOC值如图19所示,在2 300s左右,各桥臂平均SOC达到了均衡,并且接下来以同步的速度增长。上述硬件在环实验验证了用于BMMC- HEV拓扑的PHEV充电策略的有效性。
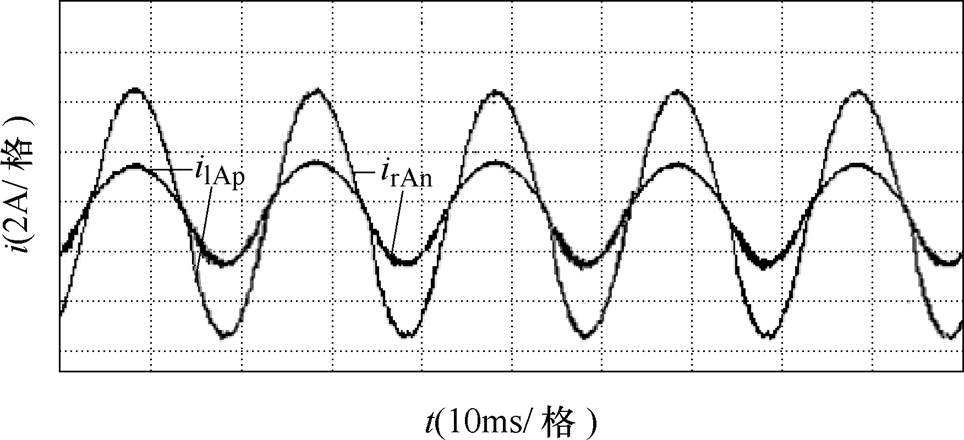
图16 实验工况5:上、下桥臂电流波形
Fig.16 Upper and lower arm current waveforms in experimental condition 5
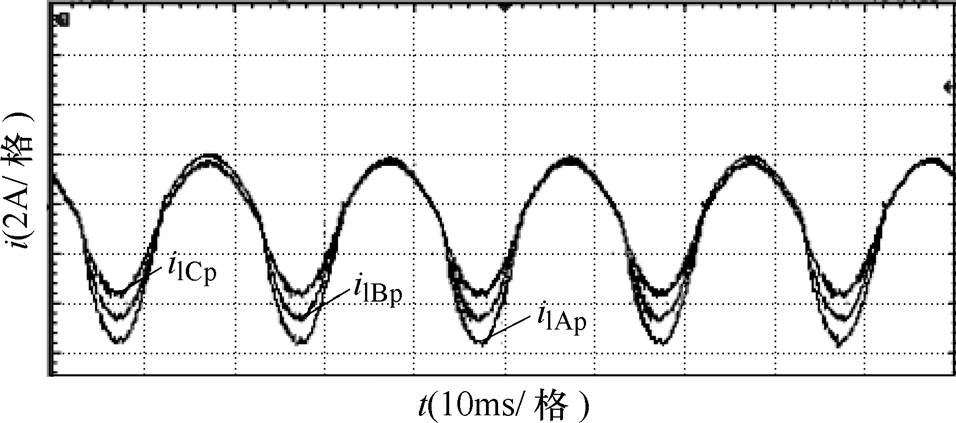
图17 实验工况5:三相桥臂电流波形
Fig.17 Arm current waveforms of three phases in experimental condition 5
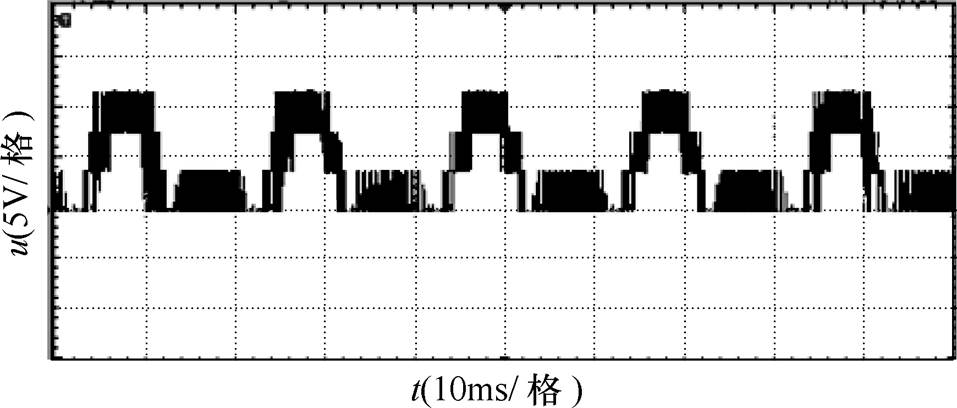
图18 实验工况5:桥臂电压波形
Fig.18 Arm voltage waveform in experimental condition 5
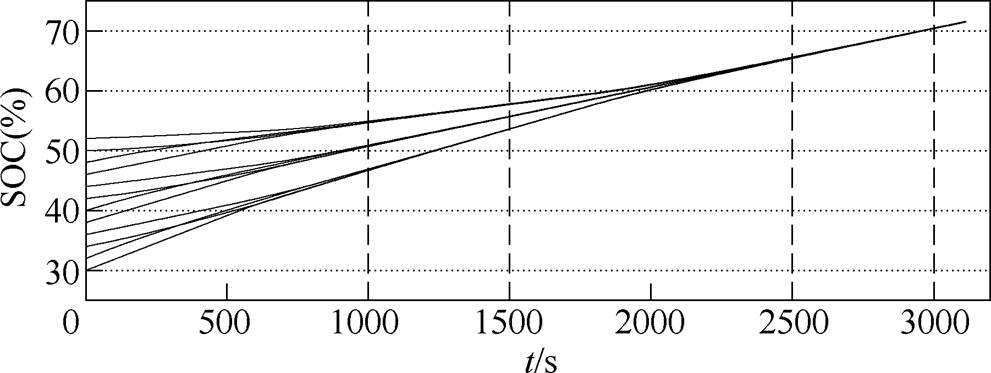
图19 实验工况5:桥臂平均SOC
Fig.19 Average SOC of arms in experimental condition 5
本文提出了一种基于“背靠背”MMC的PHEV新型一体化功率变换器拓扑,以及适用于该拓扑的PHEV外接电源均衡充电策略。该拓扑具有无需中间变换器,可直接连接两台电机,无需复杂的BMS系统,无需额外充电电路等特点。所提出的充电策略基于桥臂电流控制,采用层次化控制方法实现各桥臂及子模块电池SOC的均衡控制,且具有较高的功率因数。通过Simulink仿真平台以及RT-LAB实时仿真器所搭建的硬件在环实验,验证了所提均衡充电策略的有效性。
接下来的工作将针对该BMMC-HEV拓扑研究相应的以电池SOC均衡为基础的电机驱动控制策略。
参考文献
[1] Rahman K M, Patel N R, Ward T G, et al. Application of direct-drive wheel motor for fuel cell electric and hybrid electric vehicle propulsion system[J]. IEEE Transactions on Industry Appli- cations, 2006, 42(5): 1185-1192.
[2] Hinkkanen M, Luomi J. Braking scheme for vector- controlled induction motor drives equipped with diode rectifier without braking resistor[J]. IEEE Transactions on Industry Applications, 2006, 42(5): 1257-1263.
[3] Stephan C H, Sullivan J. Environmental and energy implications of plug-in hybrid-electric vehicles[J]. Environmental Science & Technology, 2008, 42(4): 1185-1190.
[4] 崔纳新, 步刚, 吴剑, 等. Plug-In并联式混合动力汽车实时优化能量管理策略[J]. 电工技术学报, 2011, 26(11): 155-160.
Cui Naxin, Bu Gang, Wu Jian, et al. Real-time optimization of energy management strategy for Plug-In parallel hybrid electric vehicles[J]. Transa- ctions of China Electrotechnical Society, 2011, 26(11): 155-160.
[5] 陈清泉. 电动汽车、混合动力汽车和燃料电池汽车的发展前景(英文)[J]. 汽车安全与节能学报, 2011, 2(1): 12-24.
Chan Chingchuen. Outlook of electric, hybrid and fuel cell vehicles (in English)[J]. Automotive Safety and Energy, 2011, 2(1): 12-24.
[6] 杨田, 刘晓明, 吴其, 等. 电动汽车充电站选址对电压稳定影响的研究[J]. 电力系统保护与控制, 2018, 46(5): 31-37.
Yang Tian, Liu Xiaoming, Wu Qi, et al. Research on impacts of electric vehicle charging station location on voltage stability[J]. Power System Protection and Control, 2018, 46(5): 31-37.
[7] 王琪, 孙玉坤, 罗印升. 混合动力电动汽车的复合电源功率分配控制策略[J]. 电工技术学报, 2017, 32(18): 143-151.
Wang Qi, Sun Yukun, Luo Yinsheng. A power distribution control strategy of hybrid energy storage system in hybrid electric vehicles[J]. Transactions of China Electrotechnical Society, 2017, 32(18): 143- 151.
[8] 胡腾, 许烈, 李永东, 等. 混合电动汽车多电平车载变换器的研究[J]. 电工技术学报, 2015, 30(14): 261-268.
Hu Teng, Xu Lie, Li Yongdong, et al. Research of multilevel converter on HEV[J]. Transactions of China Electrotechnical Society, 2015, 30(14): 261- 268.
[9] Khan F H, Tolbert L M. Generating isolated outputs in a multilevel modular capacitor clamped DC-DC converter (MMCCC) for hybrid electric and fuel cell vehicles[C]//IEEE Power Electronics Specialists Conference, Rhodes, Greece, 2008: 967-973.
[10] 李春杰, 黄文新, 卜飞飞, 等. 电动汽车充电与驱动集成化拓扑[J]. 电工技术学报, 2017, 32(12): 138-145.
Li Chunjie, Huang Wenxin, Bu Feifei, et al. The integrated topology of charging and drive for electric vehicles[J]. Transactions of China Electrotechnical Society, 2017, 32(12): 138-145.
[11] Tolbert L M, Chiasson J N, Mckenzie K J, et al. Control of cascaded multilevel converters with unequal voltage sources for HEVs[C]//IEEE Inter- national Electric Machines & Drives Conference, Madison, WI, USA, 2003: 663-669.
[12] Du Z, Ozpineci B, Tolbert L M, et al. DC-AC cascaded H-bridge multilevel Boost inverter with no inductors for electric/hybrid electric vehicle appli- cations[J]. IEEE Transactions on Industry Applications, 2009, 45(3): 963-970.
[13] Quraan M, Yeo T, Tricoli P. Design and control of modular multilevel converters for battery electric vehicles[J]. IEEE Transactions on Power Electronics, 2016, 31(1): 507-517.
[14] Affanni A, Bellini A, Franceschini G, et al. Battery choice and management for new-generation electric vehicles[J]. IEEE Transactions on Industrial Elec- tronics, 2005, 52(5): 1343-1349.
[15] Chatzakis J, Kalaitzakis K, Voulgaris N C, et al. Designing a new generalized battery management system[J]. IEEE Transactions on Industrial Elec- tronics, 2003, 50(5): 990-999.
[16] 王琪, 孙玉坤, 倪福银, 等. 一种混合动力电动汽车电池荷电状态预测的新方法[J]. 电工技术学报, 2016, 31(9): 189-196.
Wang Qi, Sun Yukun, Ni Fuyin, et al. A new method of battery state of charge prediction in the hybrid electric vehicle[J]. Transactions of China Electro- technical Society, 2016, 31(9): 189-196.
[17] 张伟明, 许德智, 颜文旭, 等. 基于自适应积分滑模约束控制的电池储能系统能量管理[J]. 电工技术学报, 2019, 34(6): 1282-1289.
Zhang Weiming, Xu Dezhi, Yan Wenxu, et al. Energy management of battery energy storage system based on adaptive integral sliding mode constrained control[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1282-1289.
[18] 徐顺刚, 钟其水, 朱仁江. 动力电池均衡充电控制策略研究[J]. 电机与控制学报, 2012, 16(2): 62-65.
Xu Shungang, Zhong Qishui, Zhu Renjiang. Research of equalizing charge control strategy for power battery[J]. Electric Machine and Control, 2012, 16(2): 62-65.
[19] 刘伟, 吴海桑, 何志超, 等. 一种均衡考虑锂电池内部能量损耗和充电速度的多段恒流充电方法[J]. 电工技术学报, 2017, 32(9): 112-120.
Liu Wei, Wu Haisang, He Zhichao, et al. A multistage current charging method for Li-ion battery considering balance of internal consumption and charging speed[J]. Transactions of China Electro- technical Society, 2017, 32(9): 112-120.
[20] 魏业文, 李应智, 曹斌, 等. 含Buck电路的锂电池低功耗电量均衡技术研究[J]. 电工技术学报, 2018, 33(11): 2575-2583.
Wei Yewen, Li Yingzhi, Cao Bin, et al. Research on power equalization of lithium-ion battery with less- loss Buck chopper[J]. Transactions of China Electro- technical Society, 2018, 33(11): 2575-2583.
[21] 李泉, 周云山, 王建德, 等. 基于双层准谐振开关电容的锂电池组均衡方法[J]. 电工技术学报, 2017, 32(21): 9-15.
Li Quan, Zhou Yunshan, Wang Jiande, et al. Equali- zation method of lithium battery pack based on double-tiered quasi-resonant switched capacitor[J]. Transactions of China Electrotechnical Society, 2017, 32(21): 9-15.
[22] 张涛. LLC全桥变换器电动汽车充电机设计[J]. 电气技术, 2018, 19(8): 164-167.
Zhang Tao. The design of full bridge EV charger based on LLC[J]. Electrical Engineering, 2018, 19(8): 164-167.
[23] 徐顺刚, 王金平, 许建平. 一种延长电动汽车蓄电池寿命的均衡充电控制策略[J]. 中国电机工程学报, 2012, 32(3): 43-48.
Xu Shungang, Wang Jinping, Xu Jianping. An equali- zing charge control strategy to extend battery cycle life for electric vehicles[J]. Proceedings of the CSEE, 2012, 32(3): 43-48.
[24] Thomas A Stuart, Zhu Wei. A targeted equalizer for lithium ion battery packs[C]//IEEE Vehicle Power & Propulsion Conference, Dearborn, MI, USA, 2009: 175-180.
[25] Quraan M S, D Arco S, Tricoli P, et al. Battery char- ging for electric vehicles with modular multilevel traction drives[C]//Institution of Engineering and Technology 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 2014: 1-7.
[26] 符荣, 窦满峰. 电动汽车驱动用内置式永磁同步电机直交轴电感参数计算与实验研究[J]. 电工技术学报, 2014, 29(11): 30-37.
Fu Rong, Dou Manfeng. d-axis and q-axis inductance calculation and experimental research on interior permanent magnet synchronous motors for EV[J]. Transactions of China Electrotechnical Society, 2014, 29(11): 30-37.
[27] 宫海龙, 柴凤, 程树康. 高转矩永磁轮毂电机电感参数研究[J]. 中国电机工程学报, 2010, 30(21): 61-66.
Gong Hailong, Chai Feng, Cheng Shukang. Research on inductance parameters of high torque permanent magnet in-wheel motor[J]. Proceedings of the CSEE, 2010, 30(21): 61-66.
[28] 徐政, 陈海荣, 潘武略, 等. 柔性直流输电系统[M]. 北京: 机械工业出版社, 2012.
[29] 王广柱, 孙常鹏, 刘汝峰, 等. 基于桥臂电流控制的模块化多电平变换器综合控制策略[J]. 中国电机工程学报, 2015, 35(2): 458-464.
Wang Guangzhu, Sun Changpeng, Liu Rufeng, et al. Modular multilevel converter control strategy based on arm current control[J]. Proceedings of the CSEE, 2015, 35(2): 458-464.
Charge Control Strategy of Plug-in Hybrid Electric Vehicle System Based on Modular Multilevel Converter
Abstract For the plug-in hybrid electric vehicle (PHEV) with independent generator, an integrated power converter topology based on back-to-back modular multilevel converter (MMC) and its external single-phase AC power supply charging control scheme are proposed in this paper. Using the advantage of the modular structure of MMC topology, this paper analyzes the power flow direction of each arm and sub module in the single-phase AC charging mode, and a sinusoidal half-wave modulation method suitable for this control strategy based on the carrier phase-shift SPWM is proposed. The main advantage of the proposed state of charge (SOC) multi-hierarchy equalization strategy compared to existing ones is that it achieves fast balanced charging of each battery unit without additional charging circuits or a complicated battery management system (BMS). Therefore, it is able to avoid the reduction of the cycle life of the overall energy storage system caused by the difference in single cells. The feasibility of the converter and the effectiveness of the charging control strategy were verified by Simulink simulation and hardware in loop (HIL) experiments using RT-LAB real-time simulator.
keywords:Plug-in hybrid electric vehicles, modular multilevel converter (MMC), battery state of charge equalization charging, arm current control, multi-hierarchy control
中图分类号:U469.72
DOI: 10.19595/j.cnki.1000-6753.tces.190083
山东省自然科学基金(ZR201709180272)和国家自然科学基金(51577109)资助项目。
收稿日期 2019-01-21
改稿日期 2019-08-07
银泽一 男,1994年生,硕士研究生,研究方向为电力电子装置与系统。E-mail: yin_zeyi@163.com
王广柱 男,1963年生,教授,博士生导师,研究方向为现代电力电子技术及应用。E-mail: sdwgz@sdu.edu.cn(通信作者)
(编辑 赵 鹏)