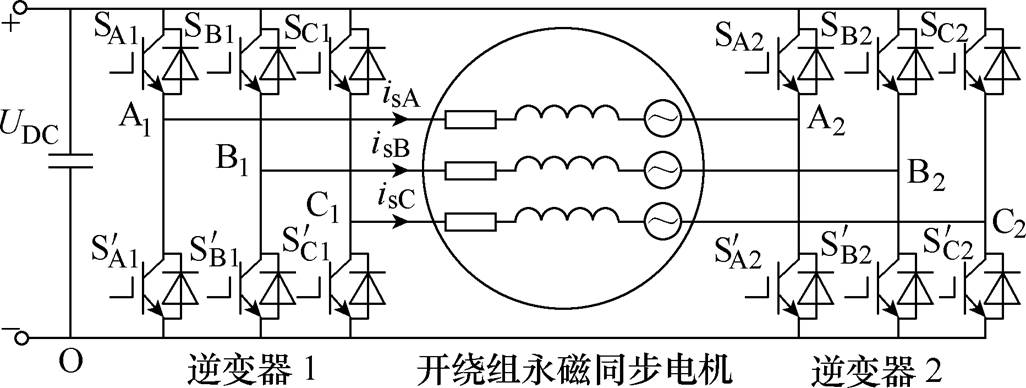
图1 共母线开绕组永磁同步电机驱动拓扑
Fig.1 The drive topology of OEW-PMSM with common DC bus
摘要 为了进一步提升共母线开绕组永磁同步电机系统在一相开路故障情况下的运行性能,提出一种基于改进空间矢量调制的缺相容错型直接转矩控制策略。首先,分析共母线开绕组永磁同步电机直接转矩控制系统无故障和一相开路时运行机理上的区别。基于此,对直接转矩控制系统中电磁转矩、定子磁链的控制器进行重构,并将零序电流控制器移除。采用重构后的电磁转矩、定子磁链控制器可生成定子电压参考值。然而,如若继续沿用无故障时的空间矢量调制策略,将无法生成所需的实际定子电压。为此,在分析剩余非故障相所能产生电压矢量的基础上,提出一种改进型空间矢量调制策略。最后,在一台功率为1kW的开绕组永磁同步电机上对所提容错型直接转矩控制策略进行验证。实验结果表明,采用所提策略使得该电机驱动系统在发生一相开路故障的情况下仍具有较小的电磁转矩和定子磁链纹波。
关键词:开绕组永磁同步电机 一相开路 容错型直接转矩控制 电磁转矩
开绕组电机驱动拓扑将传统三相星形联结的中性点打开,构成三相独立的绕组[1-3]。该驱动拓扑采用双端馈电的方式来驱动电机,在逆变器直流母线电压受限的情况下能增大电机驱动系统的输出功率[4]。且双逆变器可以产生多个离散的电压矢量,对于这一系统而言,具有冗余的电压矢量资源,电压组合灵活性高,易于实现容错驱动[5]。因此,这一拓扑一经提出便引起学术界和工业界的广泛关注[6]。
根据双逆变器母线的连接方式,可以将开绕组电机驱动拓扑分为隔离母线型[7-8]、电容电源混合供电型[9-10]以及共母线型[11-12]。相比于前两者,共母线型开绕组电机驱动拓扑仅需一条公共的直流母线对双逆变器进行供电,系统的体积、质量和成本均有所降低。并且,共直流母线的结构打破了定子三相电流之和必须为零的电路拓扑约束,使得该驱动系统比隔离母线型和电容电源混合供电型增加一个控制自由度[13]。当电机绕组或者逆变器发生故障时,这一多余的控制自由度可以用于系统的容错控制,使开绕组电机驱动系统在一相开路后仍可继续运行[14]。
近年来,共母线开绕组电机驱动拓扑的容错控制策略被广泛研究[15-20]。文献[15]提出一种新型的共直流母线开绕组容错拓扑结构,并采用中六边形调制策略。该文在改进容错拓扑结构的基础上,引入解耦调制的方法,提出统一的容错调制策略,使其可实现任意两桥臂开路故障的容错运行。文献[16]将阻抗源逆变器的升压功能和3-H桥逆变器的容错功能相结合,提出一种兼具升压和容错功能的开绕组感应电机驱动系统。通过合理安排直通零矢量,可实现该系统一相开路故障下的容错运行。然而,文献[15-16]需要增加额外硬件资源,降低了该电机驱动系统在体积、质量、成本等方面的竞争力。
与文献[15-16]不同的是,文献[17-18]中利用现有的硬件资源实现共母线开绕组电机驱动系统的容错运行。文献[17]提出两种零序电流注入方案对相电流进行抬升,使得共母线开绕组电机驱动拓扑在续流二极管发生故障的情况下也可以正常运行。然而,该方案需要注入额外的零序电流,使得系统损耗较大,且该方案中零序电流参考值的计算相对复杂。文献[18]令开绕组电机驱动系统中发生故障的开关管不再继续工作,但相应的续流二极管继续工作,从而将该电机驱动拓扑重构成一侧是全控型变换器、另一侧是半控型变换器的新结构。但该系统中半控型变换器各相的电平由相电流钳位,无法进行主动控制。因此,控制策略也比较复杂。
为解决文献[17-18]中控制复杂的问题,文献[19-21]针对开绕组电机驱动拓扑一相开路情形提出一种在移相静止坐标系上合成定子电压参考矢量的方法,简化了空间矢量调制策略。然而,文献[19-21]所提策略仅对调制策略进行改进,未配套合适的控制策略。因此,无法将电磁转矩纹波完全抑制。
上述研究表明,现有的开绕组电机容错策略中,在不增加硬件资源和控制复杂程度的前提下,仍具有较好控制性能的尚比较少。此外,文献[15-21]研究的均是开绕组电机驱动系统的缺相容错型矢量控制。关于开绕组电机驱动系统的缺相容错型直接转矩控制尚未见文献公开发表。直接转矩控制相比于矢量控制具有更快的动态响应以及对参数变化具有更强的鲁棒抑制能力,且直接转矩控制对电机的电磁转矩和定子磁链进行控制,对相电流没有对称、正弦化的绝对要求,使其在容错驱动场合具有天然优势。研究开绕组永磁同步电机缺相容错型直接转矩控制对于进一步提升该电机驱动系统在一相开路情况下的运行性能具有重要意义。因此,本文针对共母线开绕组永磁同步电机一相开路的故障情形提出一种基于改进空间矢量调制策略的缺相容错型直接转矩控制策略(Fault tolerant Direct Torque Control, F-DTC)。
本文所提F-DTC策略的主要创新之处包括: ①在研究无故障和故障情况该电机驱动系统运行机理区别的基础上,对无故障运行时的直接转矩控制策略进行重构。将定子电压进行变换,并对零序电流控制器进行移除,提出一相开路故障情况下的容错型直接转矩控制策略;②分析一相开路故障后双逆变器产生的定子电压矢量,基于此,提出一种适用于该故障情形的改进型空间矢量调制策略。
本文采用的共母线开绕组永磁同步电机(Open End Winding-Permanent Magnet Synchronous Motor, OEW-PMSM)驱动拓扑如图1所示。
图1 共母线开绕组永磁同步电机驱动拓扑
Fig.1 The drive topology of OEW-PMSM with common DC bus
基波平面坐标系定义如图2所示。图2中,ABC为自然坐标系,ab 为静止坐标系,dq为转子同步旋转坐标系,a 轴与A相绕组轴线重合,d和a 轴之间夹角为转子旋转的电角度qr。wr为转子旋转电角速度。 为定、转子磁链之间的夹角,定义为负载角。us、is、ys、y1r分别为定子侧电压矢量、电流矢量、定子磁链矢量和转子磁链矢量的基波分量。这些矢量在a 轴、b 轴、d轴、q轴以及A、B、C相上投影分别用下标“a”、“b”、“d”、“q”和“A、B、C”标示。此外,下标中包含“0”的为相关变量的零序分量,在图2所示的基波平面坐标系定义中未标出。
为定、转子磁链之间的夹角,定义为负载角。us、is、ys、y1r分别为定子侧电压矢量、电流矢量、定子磁链矢量和转子磁链矢量的基波分量。这些矢量在a 轴、b 轴、d轴、q轴以及A、B、C相上投影分别用下标“a”、“b”、“d”、“q”和“A、B、C”标示。此外,下标中包含“0”的为相关变量的零序分量,在图2所示的基波平面坐标系定义中未标出。
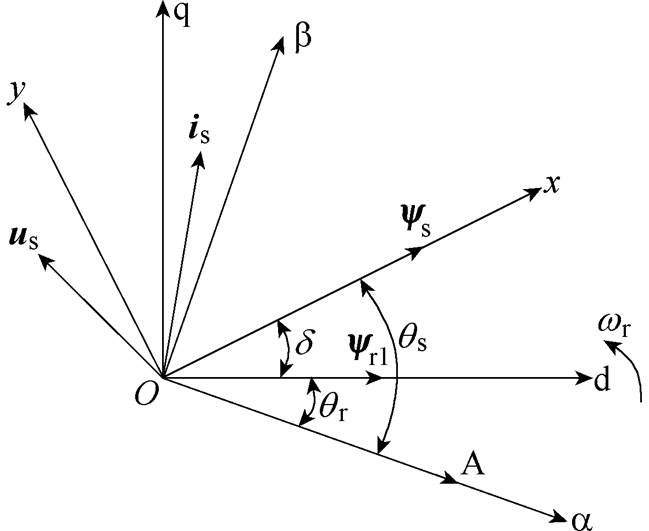
图2 基波平面坐标系定义
Fig.2 Definitions of coordinate system on fundamental plane
共直流母线开绕组电机驱动系统的数学模型为
 (1)
(1) (2)
(2)
 (3)
(3)
 (4)
(4) (5)
(5)
 (6)
(6)
 (7)
(7)式中,Rs为定子电阻;Ld、Lq分别为d、q轴电感; 为相绕组漏感;
为相绕组漏感; 为永磁体磁链幅值;
为永磁体磁链幅值; 为3次谐波磁链的幅值;np为电机磁极对数。
为3次谐波磁链的幅值;np为电机磁极对数。
定子磁链的幅值、相位分别为
 (8)
(8) (9)
(9)
式中, 和
和 分别为定子磁链的幅值和相位。
分别为定子磁链的幅值和相位。
双逆变器输出的电压矢量可以通过两个单逆变器输出的电压矢量来合成,具体为
 (10)
(10)式中, 和
和 分别为逆变器1和逆变器2单独输出的电压矢量;
分别为逆变器1和逆变器2单独输出的电压矢量; 为一个控制周期;
为一个控制周期; 和
和 分别为逆变器1和逆变器2各相上管的导通时间;UDC为直流母线电压。
分别为逆变器1和逆变器2各相上管的导通时间;UDC为直流母线电压。
定子电压矢量从ABC坐标系变换至静止坐标系,有
 (11)
(11)其中
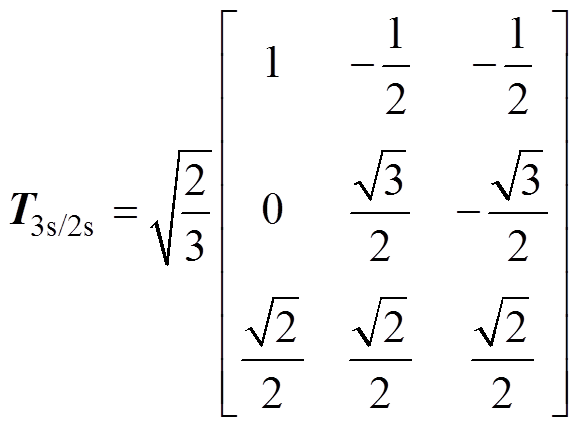 (12)
(12)
将式(10)和式(12)代入式(11),可以得到定子电压矢量与逆变器开关组合的关系为
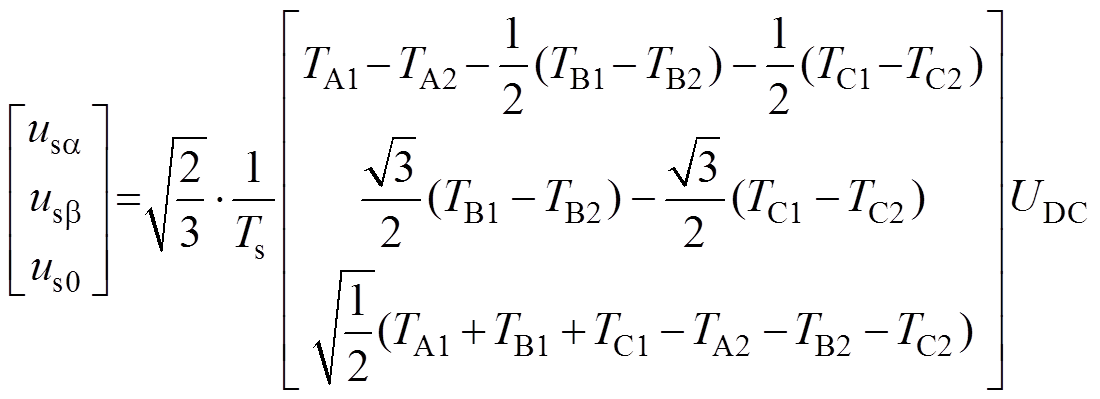 (13)
(13)将各相上管的导通时间分别取0或者Ts代入式(13)中,并根据式(13)的前两行画出逆变器输出ab 平面电压矢量如图3所示。共母线双逆变器驱动拓扑共可产生64个电压组合,在ab 平面上分别分布在六边形ABCDEF、PQRSTU、HIJKLM以及原点O上,构成19个大小、方向各异的电压矢量。每个电压矢量对应的开关组合如图3所示,以 为例,即逆变器1输出电压矢量3(010),同时逆变器2输出电压矢量
为例,即逆变器1输出电压矢量3(010),同时逆变器2输出电压矢量 ,其他情形类似,这里不再赘述。
,其他情形类似,这里不再赘述。

图3 逆变器输出电压矢量
Fig.3 The voltage vectors output by the inverter
借助式(9)所求得的定子磁链相位,将dq坐标系上的定子电压平衡方程旋转至图2所示的xy坐标,则xy坐标系上的定子电压平衡方程可以整理得
 (14)
(14) (15)
(15)
根据式(14)和式(15)可知,在忽略定子电阻压降的情况下,定子电压的x轴分量用于控制定子磁链幅值,定子电压的y轴分量通过控制负载角从而间接控制电磁转矩。因此,控制好定子电压在x轴、y轴分量即可实现对定子磁链幅值、电磁转矩的同时控制。本文选择图3中六边形PQRSTU顶点上的电压矢量作为基本电压矢量来构建空间矢量调制策略以实现对电磁转矩和定子磁链的控制。此外,零序电流的抑制对无故障运行时的开绕组电机驱动系统也十分重要。本文在无故障运行时采用PI控制器来生成零序电压参考值,并采用零序电压分量不为零的零矢量 和
和 来生成实际零序电压,具体可参见文献[1]。根据上述分析构建出无故障运行时共母线开绕组永磁同步电机空间矢量调制型直接转矩控制如图4所示。
来生成实际零序电压,具体可参见文献[1]。根据上述分析构建出无故障运行时共母线开绕组永磁同步电机空间矢量调制型直接转矩控制如图4所示。
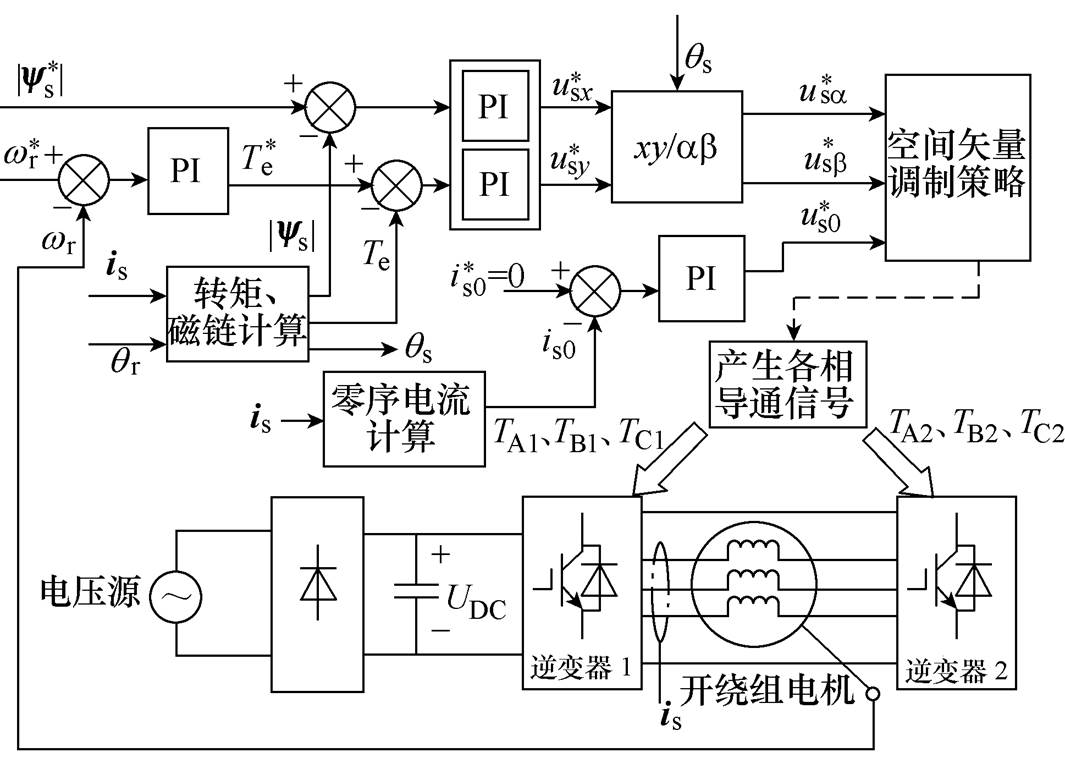
图4 开绕组永磁同步电机无故障情况下的直接转矩控制框图
Fig.4 The control diagram of direct torque control for OEW-PMSM under fault-free condition
当共母线开绕组永磁同步电机驱动系统发生一相开路故障(本文中假设为A相开路)后,将故障相及对应的驱动桥臂隔离,剩余两相非故障相继续工作,构成如图5所示的容错型驱动拓扑。
由于故障相的相电流为零,且对应的驱动桥臂被隔离,无法产生所需的电压矢量。因此,在ABC自然坐标系中故障相对应的分量将不再考虑。据此,将式(12)所示的坐标变换矩阵中与A相有关的第一行和第一列划去,则该坐标变换矩阵可简化为
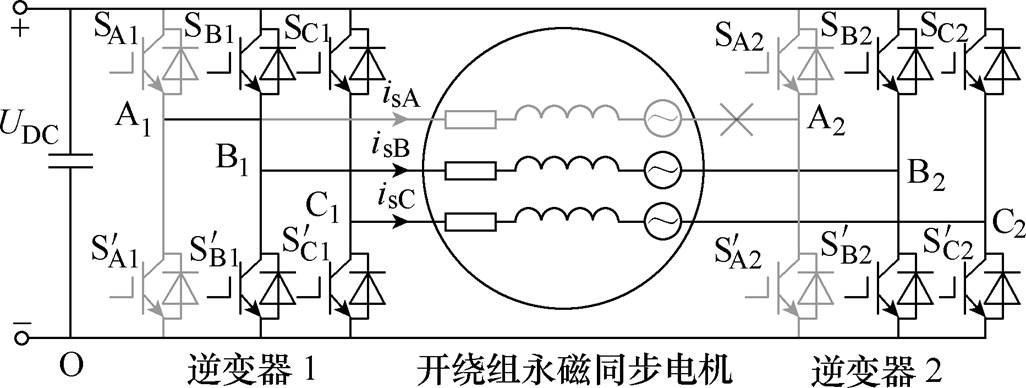
图5 共母线开绕组永磁同步电机一相开路驱动拓扑
Fig.5 The drive topology of OEW-PMSM with common DC bus under one phase open circuit condition
 (16)
(16)式(16)的变换矩阵中,两组行向量分别为
 (17)
(17)
 (18)
(18)式(17)和式(18)中的两组行向量点乘结果为
 (19)
(19)
根据式(19)可知,式(17)和式(18)中的两组行向量仍然是正交的,可以作为ab 平面的一组基本正交基。然而,a和b幅值的求解结果为
 (20)
(20) (21)
(21)
可知,a和b的幅值不再相等,且b的幅值是a幅值的 倍。如若继续采用式(16)中的变换矩阵,那么从ABC坐标系变换至ab 坐标系的定子电压虽然正交,却难以保持对称,这无疑给空间矢量调制的实施增加了难度。
倍。如若继续采用式(16)中的变换矩阵,那么从ABC坐标系变换至ab 坐标系的定子电压虽然正交,却难以保持对称,这无疑给空间矢量调制的实施增加了难度。
为保证经过坐标变换后的电压矢量不仅正交,而且对称,本文将定子电压作如下变换,有
 (22)
(22)式中, 和
和 分别为变换后的定子电压在a 轴和b 轴的分量。
分别为变换后的定子电压在a 轴和b 轴的分量。
根据式(17)~式(21)的分析可知,直接采用式(16)所示的矩阵进行坐标变换得到的定子电压的b 轴分量为其a 轴分量的倍。利用式(22)的矩阵对其进行变换后,可使得和的幅值相等。经过上述变换,再配以合适的空间矢量调制策略(具体在2.2节介绍),则可实现对基波平面的有效控制。此外,与无故障运行时不同的是,该系统在发生一相开路故障后仅剩下两相非故障相继续工作。此时,该系统的控制自由度从无故障时的3个减少为2个。从重要程度而言,应选择对电机控制最关键的两个物理量,即电磁转矩和定子磁链进行控制,而未选择对零序电流进行控制。虽然,一相开路后未对零序电流进行控制,但由于本文所用开绕组电机的3次谐波磁链幅值相对较小,仅为基波的5.05%。根据式(7)可知,3次谐波磁链与零序电流乘积项所产生的这部分电磁转矩较小。故而,其对电磁转矩的影响在本文可以忽略。基于上述分析,对故障后的系统控制框图进行重构,得到如图6所示的一相开路故障情况下的直接转矩控制框图。
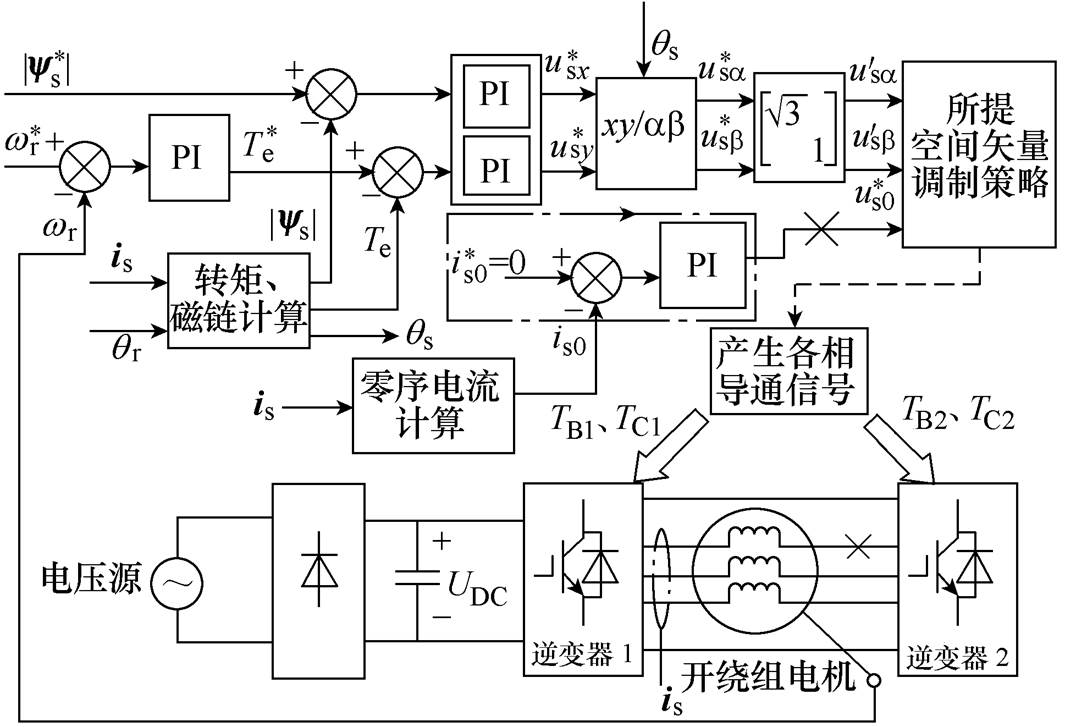
图6 开绕组永磁同步电机一相开路故障情况下的直接转矩控制框图
Fig.6 The control diagram of direct torque control for OEW-PMSM under one phase opened condition
值得注意的是,图6与图4所示的无故障情况下的直接转矩控制框图的主要区别如下:
(1)图6中A相及所对应的两个桥臂不再参与工作。
(2)图6中送入空间电压矢量调制模块的参考电压矢量值不是直接经过电磁转矩和定子磁链双闭环PI调节器得到的 和
和 ,而是和经过坐标变换后得到的和。
,而是和经过坐标变换后得到的和。
(3)图4中无故障时的空间矢量调制策略无法继续适用于图6所示的一相开路情形。因此,图6中的空间矢量调制策略是针对这一故障情形专门提出的,将在2.2节进行具体分析。
(4)与图4相比,图6中减少了一个控制自由度,无需再对零序电流进行抑制。因此,零序电流控制器被移除。
2.1节虽然对故障后的控制策略进行重构,但尚未对缺相情况下的空间矢量调制策略进行分析,本节将对此展开分析。A相开路后,双逆变器输出电压矢量在ABC坐标系上的表达式为
 (23)
(23)利用式(16)将式(23)的电压矢量从ABC坐标系变换至静止坐标系,再经过式(22)的变换,可得
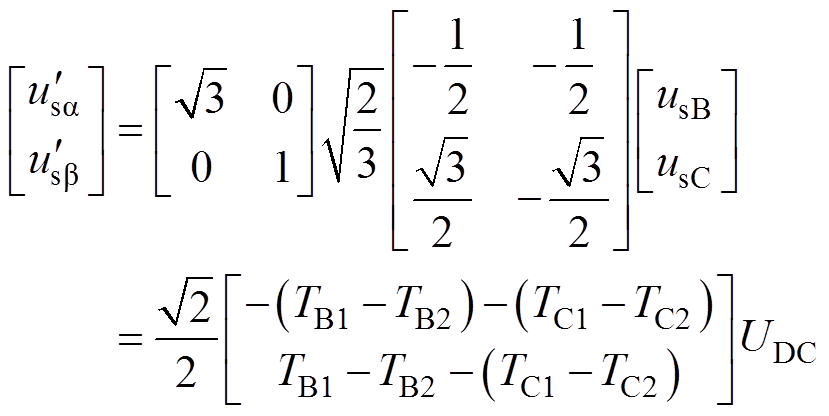 (24)
(24)
根据式(24)可以画出A相开路后双逆变器输出的ab 平面电压矢量如图7a所示(这里仅画出需要用到的电压矢量)。如果继续采用无故障时的6个基本电压矢量,即 和
和 。那么,这6个电压矢量所能围成的最大圆如图7a中的圆C1所示,该电压极限圆C1所围区域属于线性调制区。由图7a可见,该线性调制范围较窄。为了进一步拓宽容错运行情况下的线性调制范围,在所提的改进型调制策略中加入电压矢量
。那么,这6个电压矢量所能围成的最大圆如图7a中的圆C1所示,该电压极限圆C1所围区域属于线性调制区。由图7a可见,该线性调制范围较窄。为了进一步拓宽容错运行情况下的线性调制范围,在所提的改进型调制策略中加入电压矢量 和
和 作为基本电压矢量。那么,基本电压矢量数量从6个增加至8个。此时,这8个电压矢量所能围成的最大圆如图7b中的圆C2所示。与C1相比,C2的半径增加了30.7%。因此,增补和作为基本电压矢量可使得线性调制范围拓宽30.7%。
作为基本电压矢量。那么,基本电压矢量数量从6个增加至8个。此时,这8个电压矢量所能围成的最大圆如图7b中的圆C2所示。与C1相比,C2的半径增加了30.7%。因此,增补和作为基本电压矢量可使得线性调制范围拓宽30.7%。
本文所提改进型空间矢量调制策略的主要步骤如下:
(1)计算电压矢量 的相位
的相位 和幅值
和幅值 分别为
分别为
 (25)
(25)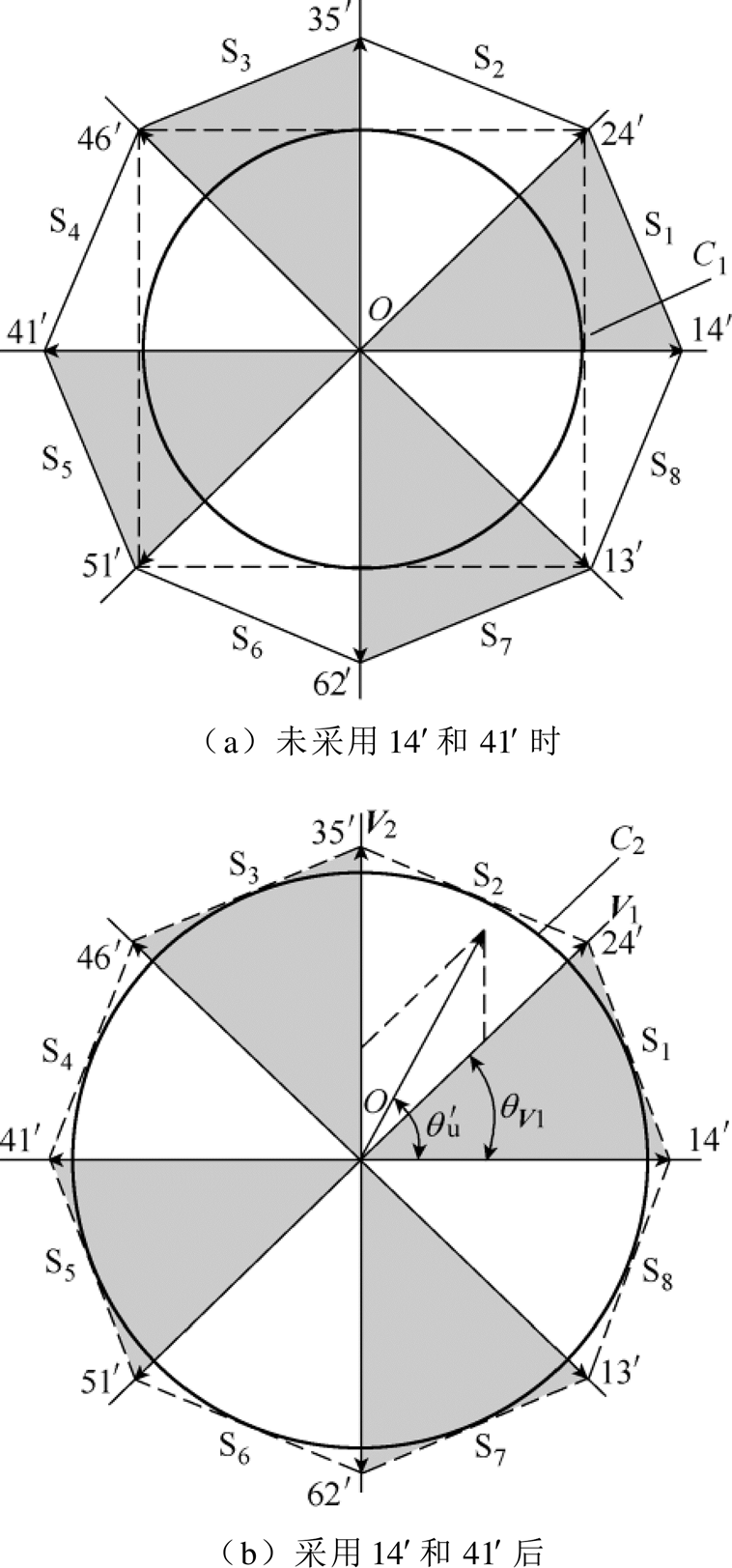
图7 A相开路后双逆变器输出电压矢量
Fig.7 The voltage vector diagram output by dual inverter after phase-A opening
 (26)
(26)(2)将图7中的电压矢量按逆时针方向每隔 45°划分一个扇区,总共分成8个扇区,分别标记为S1, S2,…,S8。并根据步骤(1)计算出的判断定子电压所处扇区Si(i=1, 2,…,8)。
(3)在每个扇区内,由相邻的两个基本电压矢量合成所需的电压矢量。其中,相位滞后的基本电压矢量记为V1,相位超前的基本电压矢量记为V2。归纳各个扇区内的V1和V2,见表1,各扇区内V1的相位 见表2。
见表2。
(4)根据图7b所示的示意图以及三角形的正弦定律,可以得到
 (27)
(27)表1 各扇区内的电压矢量V1和V2
Tab.1 Voltage vector V1 and V2 in every sector

扇区电压矢量 V1V2 S114'24' S224'35' S335'46' S446'41' S541'51' S651'62' S762'13' S813'14'
表2 各扇区电压矢量V1的相位qV1
Tab.2 qV1 of voltage vector V1in every sector
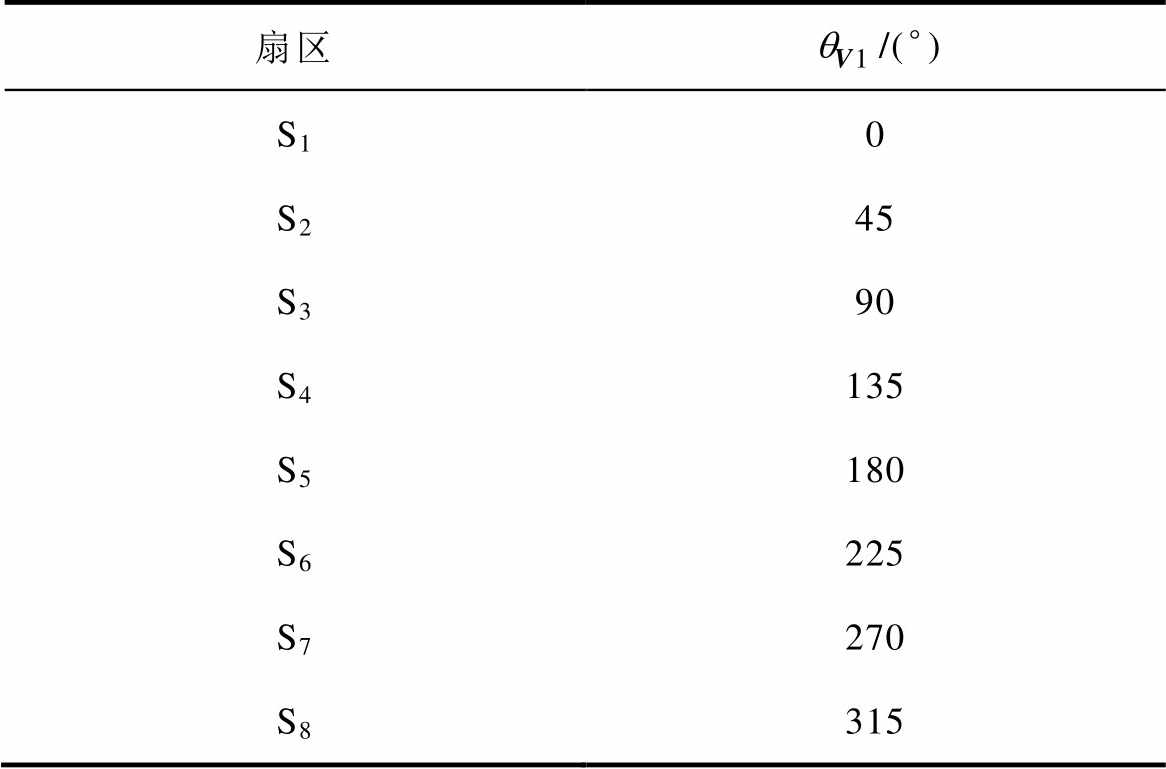
扇区/(°) S10 S245 S390 S4135 S5180 S6225 S7270 S8315
式中, 和
和 分别为电压矢量V1和V2的幅值;T1和T2分别为电压矢量V1和V2的作用时间。根据式(27)可以进一步整理得T1和T2的表达式为
分别为电压矢量V1和V2的幅值;T1和T2分别为电压矢量V1和V2的作用时间。根据式(27)可以进一步整理得T1和T2的表达式为
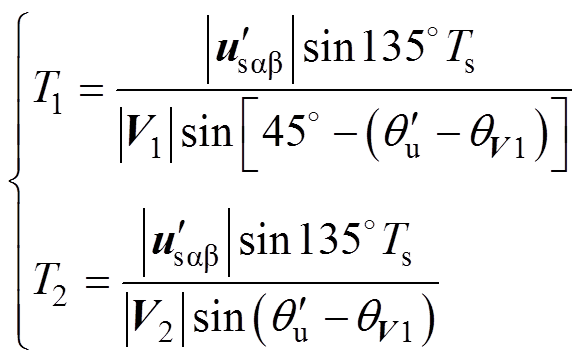 (28)
(28)(5)根据定子电压所处的扇区Si(i=1, 2,…,8)以及计算出两个基本电压矢量的作用时间T1和T2,查询表3即可获得各相上管的导通时间,分别记为TB1~TC2。以定子电压处于第二扇区为例,根据表1可知,所选的两个基本电压矢量V1和V2分别是24'(110-011) 和35'(010-001),且它们的作用时间分别为T1和T2。一个控制周期内剩余时间为Ts-T1-T2,用零矢量 (000-000) 插入。那么,可以得到TB1、TC1、TB2和TC2分别为T1+T2、0、T1和T1+T2。其余扇区的情况类似,见表3。
表3 各相上管导通时间
Tab.3 Conduction time of upper switch of each phase
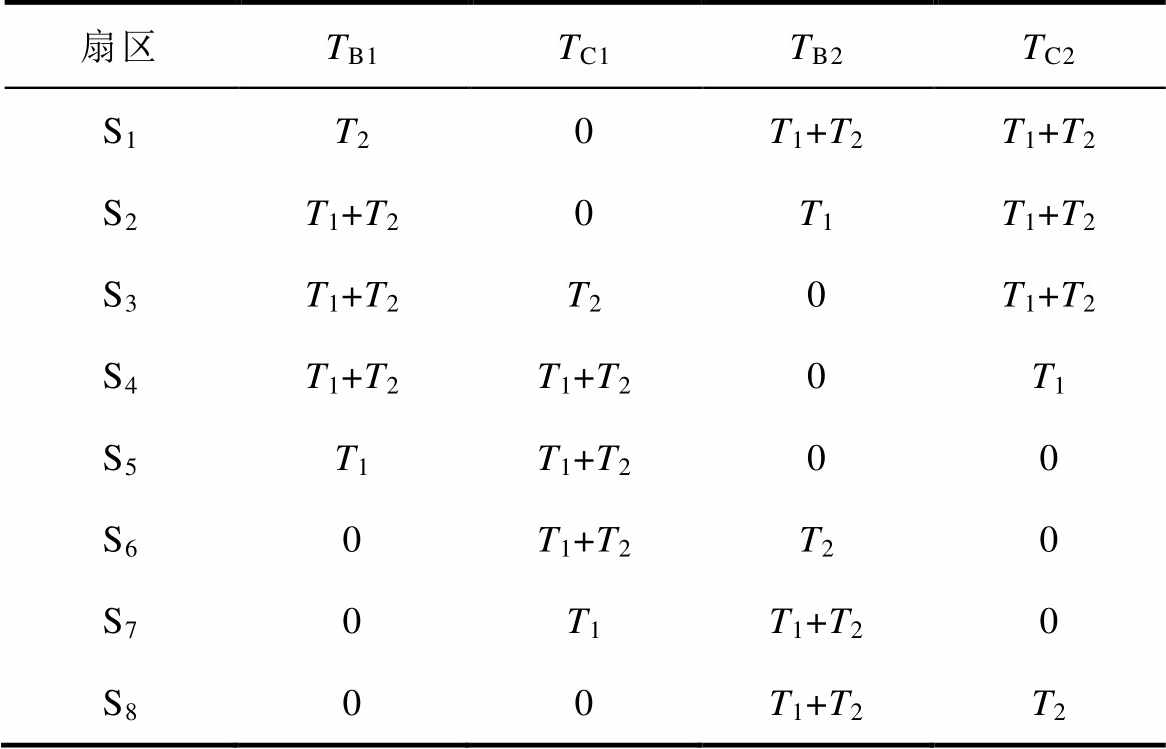
扇区TB1TC1TB2TC2 S1T20T1+T2T1+T2 S2T1+T20T1T1+T2 S3T1+T2T20T1+T2 S4T1+T2T1+T20T1 S5T1T1+T200 S60T1+T2T20 S70T1T1+T20 S800T1+T2T2
上述步骤可总结为如图8所示的程序流程,将图8中所提改进型空间矢量调制策略应用至图5中,则可实现共母线开绕组永磁同步电机在发生一相开路故障后的容错运行。
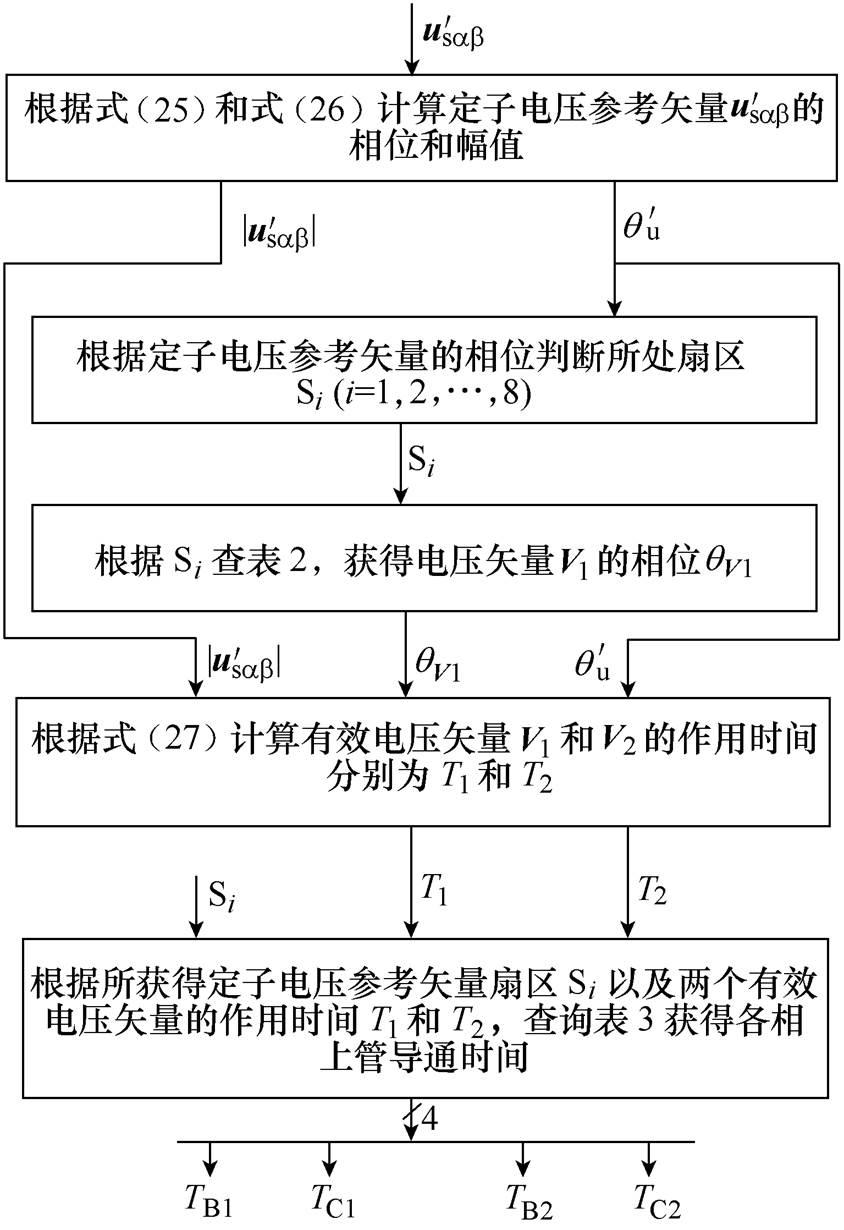
图8 所提调制策略程序流程
Fig.8 The flow chart of the proposed modulation strategy
本文所采用三相开绕组永磁同步电机直接转矩控制系统实验平台如图9所示。选用型号为KV46F256LL16的控制芯片,IGBT采用英飞凌公司的F4_75R12KS4。采用艾默生M701系列变频器驱动异步电动机构成电机对拖平台作为负载,脉冲宽度调制(Pulse Width Modulation, PWM)控制周期为50ms。实验所用波形通过JLINK-SCOPE获得。实验用的三相开绕组永磁同步电机额定参数见表4。
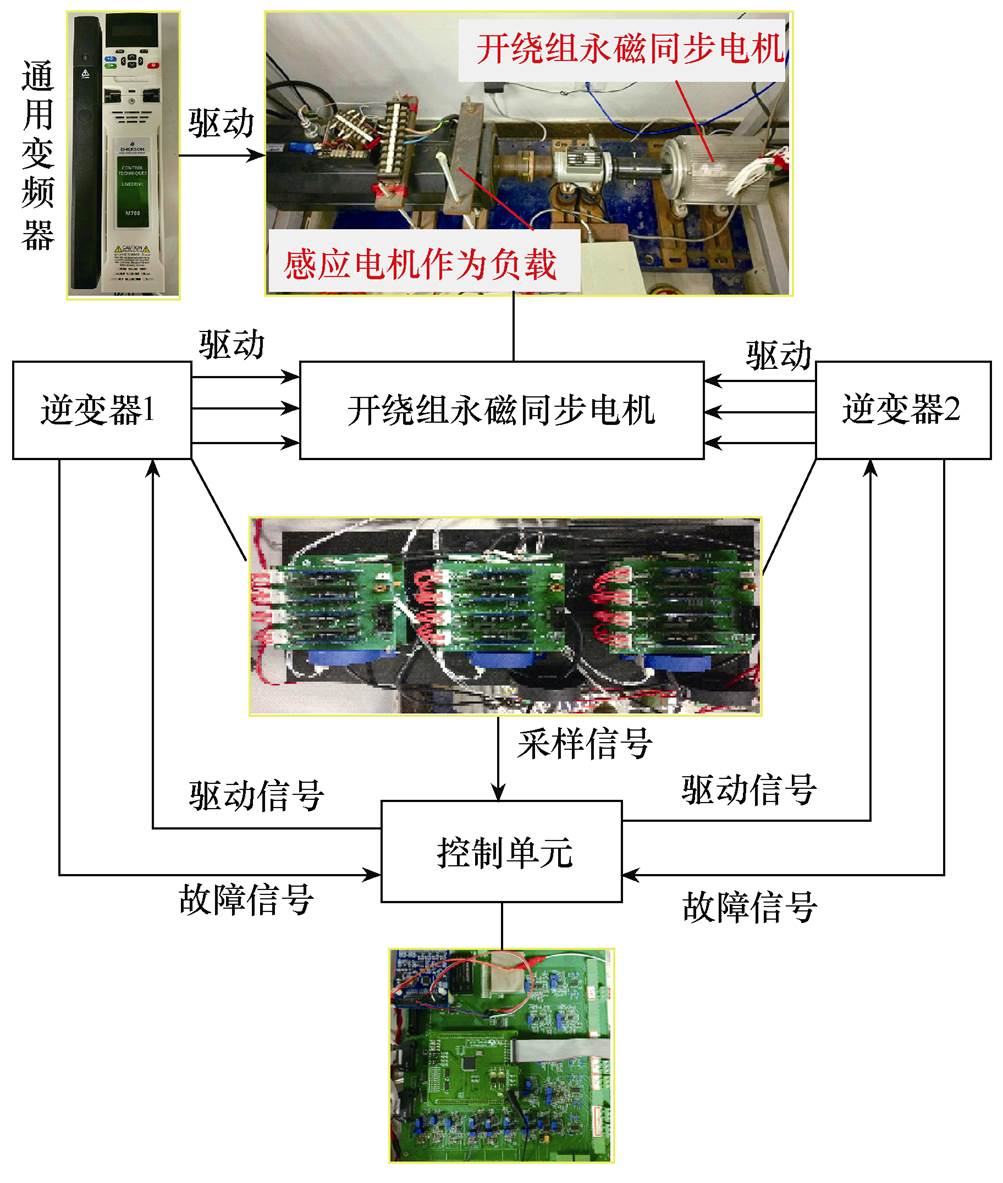
图9 三相OEW-PMSM直接转矩控制系统实验平台
Fig.9 Experimental platform of direct torque control for three-phase OEW-PMSM
表4 三相开绕组永磁同步电机参数
Tab.4 Data of three-phase OEW-PMSM
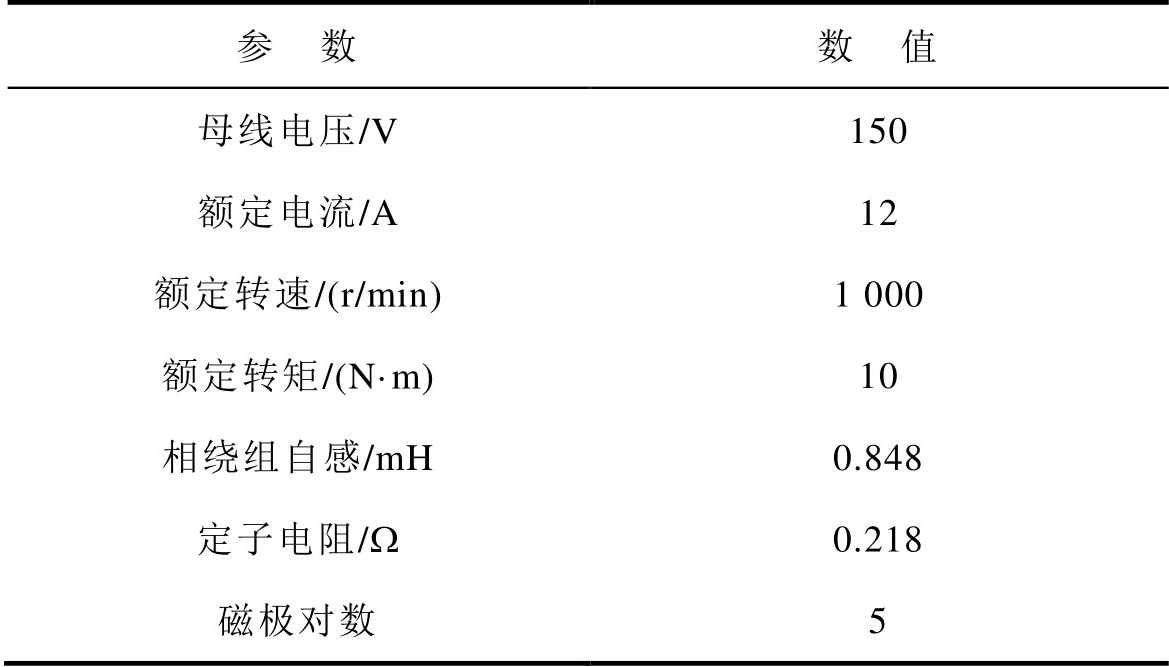
参 数数 值 母线电压/V150 额定电流/A12 额定转速/(r/min)1 000 额定转矩/(N·m)10 相绕组自感/mH0.848 定子电阻/W0.218 磁极对数5
图10为无故障状态下共母线开绕组永磁同步电机直接转矩控制系统在额定转速带6.2N·m负载的稳态实验波形。图10a中,三相电流正弦度均较好,且三相幅值相等,电机处于对称运行状态。图10b中,定子磁链幅值波形正弦度高,且a 轴分量和b 轴分量相位相差90°。因此,定子磁链幅值被控制为一个恒定值。由于在无故障运行时采用了空间矢量调制策略,图10c中,电磁转矩纹波较小,转矩跟踪效果好。此外,电机转速稳定控制在1 000r/min左右,误差较小。由于无故障运行时采用了如图4所示的零序电流闭环调节器,零序电流得到了有效的抑制,其瞬时值基本稳定在0附近。
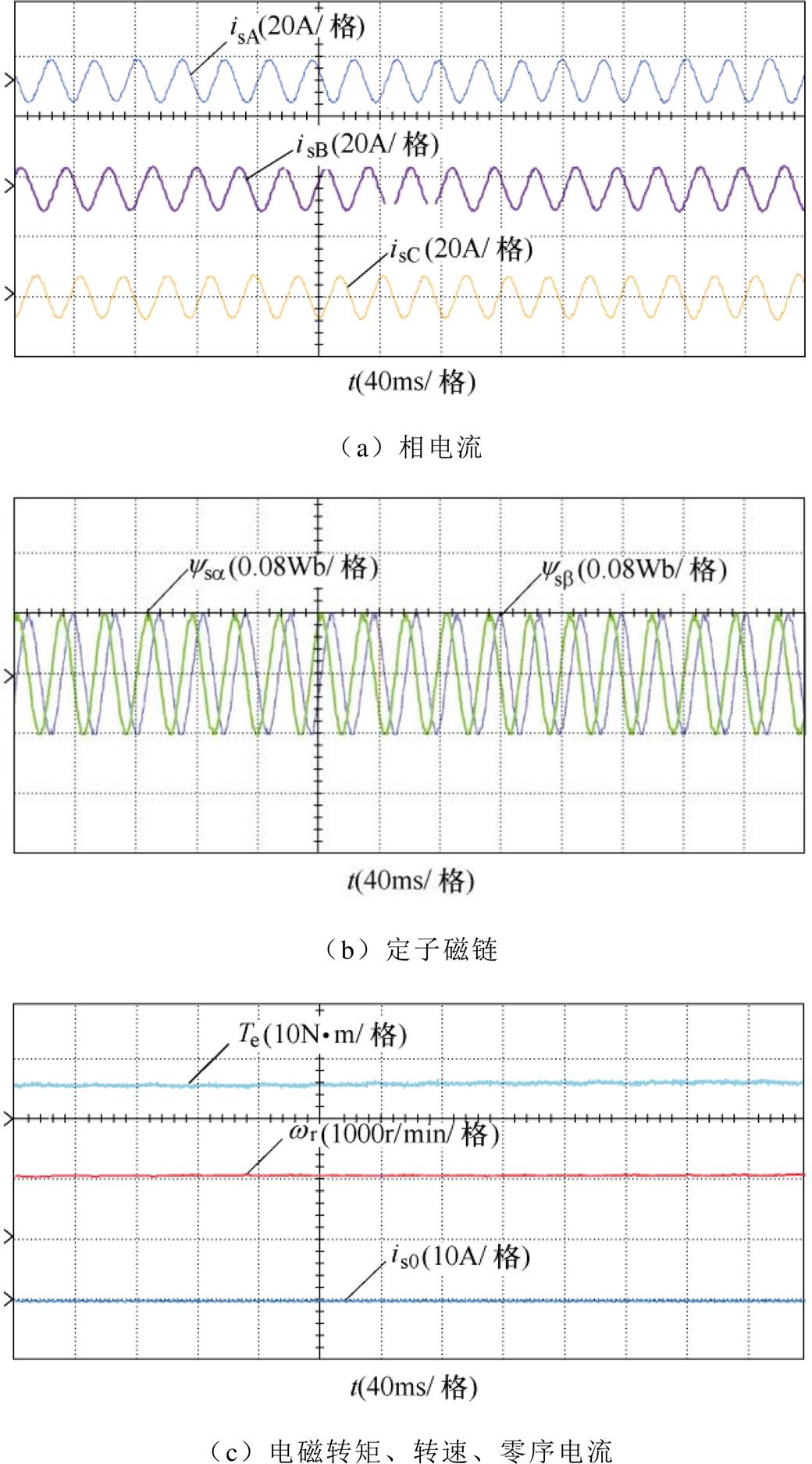
图10 额定转速无故障运行实验结果
Fig.10 Experimental results at rated speed under fault-free condition
在一相发生开路故障后,将故障相桥臂隔离,程序不做任何改变的情况下即继续采用无故障运行时的控制策略,得到如图11所示的实验结果。从图11a可见,A相电流变为0,剩余的两相非故障相电流发生畸变,系统处于不对称运行状态。且B相和C相两相相电流幅值相差较大。电机的带载能力受限于幅值最大的非故障相相电流幅值(即C相电流幅值)。因此,这一状态下系统带载能力急剧下降。与图10b中相比,图11b中的定子磁链纹波明显增加且主要呈现的是低次谐波。图11c中电磁转矩纹波急剧增加,难以输出平稳的电磁转矩。虽然,此时系统中仍有零序电流闭环。但发生开路故障后,零序电流已无法准确跟踪给定值。
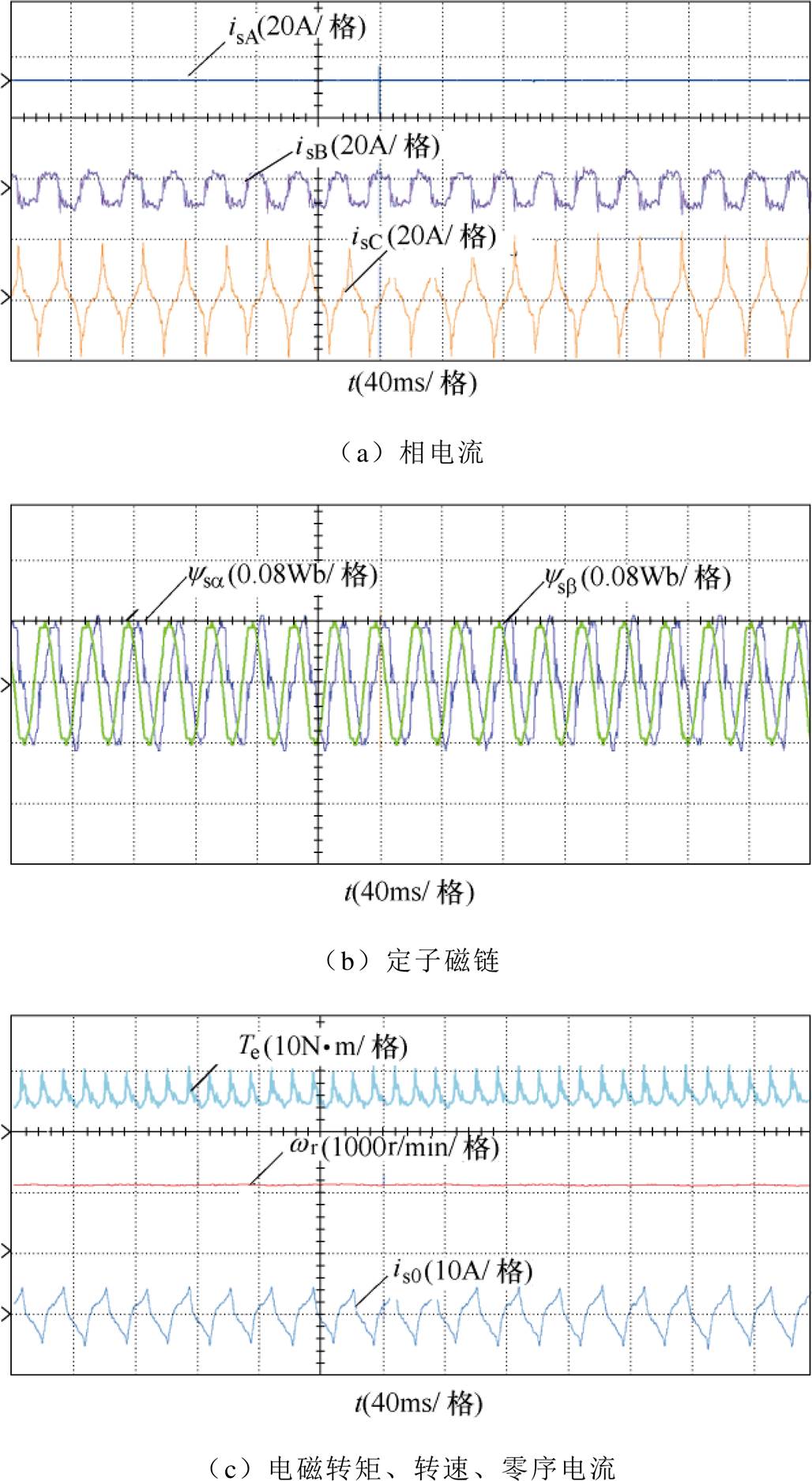
图11 额定转速一相开路故障实验结果
Fig.11 Experimental results at rated speed under one phase opened condition
此外,由于转速环是外环,时间惯量大,因此对转速造成的影响不是特别明显,实际转速仍然能稳定在1 000r/min左右。图11的实验结果表明,发生一相开路故障后如若继续采用无故障时的控制策略,系统性能将急剧恶化。
为了改善一相开路情况下该电机驱动系统的运行性能,采用图8所示的F-DTC策略。图12为采用F-DTC策略后在额定转速下带6.2N·m负载的稳态实验结果。从图12a所示的实验结果可见,B相和C相电流比图11b中的相电流波形有所改善。且两相电流的幅值近似相等,这也使得开路情况下的带载能力相比于图11大幅度提高。图12b中定子磁链纹波比图11b中有所减小,几乎与图10b一致,这说明了采用所提F-DTC策略后可以实现对定子磁链的有效控制。与图11c相比,图12c中定子磁链纹波更小,电机的电磁转矩控制得更加平稳。由于没有多余的控制自由度对零序电流进行控制,图12c中零序电流不再为零,这也间接导致了图12a中相电流比图12c中相电流波形正弦度略微下降。

图12 额定转速容错运行实验结果
Fig.12 Experimental results at rated speed under fault-tolerant operation condition
上述实验结果表明,在零序电流无法完全抑制的情况下,F-DTC中电磁转矩仍能比较平稳,其原因在于:①直接转矩控制直接以电磁转矩为控制目标,对电机相电流没有对称、正弦化的要求。因此,在理论上有可能存在相电流不完全正弦的情况下电磁转矩仍比较平稳;②采用该策略后存在一定的零序电流,但一方面,该零序电流幅值有限;另一方面,由于永磁体3次谐波磁链幅值较小,故而零序电流与永磁体3次谐波的乘积项在转矩公式中占比较小。所以,零序电流对电磁转矩的影响可以忽略。
该文通过建立共母线开绕组永磁同步电机的数学模型,分析了开绕组永磁同步电机一相开路的容错运行机理。基于此,提出一种开绕组永磁同步电机开路容错型直接转矩控制策略(F-DTC)。当电机绕组或者逆变器发生一相开路故障,双逆变器所能产生的有效电压矢量及零矢量均发生改变,无故障运行时的空间矢量调制策略不再适用。该文在分析剩余非故障相所产生的电压矢量的基础上,提出一种适用于一相开路情形的改进型空间矢量调制策略。对所提策略进行实验验证,实验结果表明,一相开路后,采用所提F-DTC策略可以对电机的电磁转矩和定子磁链脉动进行有效抑制。
参考文献
[1] Lin Xiaogang, Huang Wenxin, Wen Jiang, et al. Direct torque control for three-phase open-end winding PMSM with common DC bus based on duty ratio modulation[J]. IEEE Transactions on Industrial Electronics, 2020, 35(4): 4216-4232.
[2] 曾恒力, 年珩, 周义杰. 基于比例谐振控制的共直流母线开绕组永磁同步电机零序电流抑制技术[J]. 电工技术学报, 2016, 31(22): 35-44.
Zeng Hengli, Nian Heng, Zhou Yijie. Zero sequence current suppression for open winding permanent magnet synchronous motor with common DC bus based on proportional-resonant controller[J]. Transa- ctions of China Electrotechnical Society, 2016, 31(22): 35-44.
[3] Zhou Yijie, Nian Heng. Zero-sequence current suppression strategy of open-winding PMSG system with common DC bus based on zero vector redistribution[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3399-3408.
[4] Takahashi I, Ohmori Y. High-performance direct torque control of an induction motor[J]. IEEE Transactions on Industrial Applications, 1989, 25(2): 257-264.
[5] 年珩, 周义杰, 曾恒力. 开绕组永磁同步发电机的容错控制[J]. 电工技术学报, 2015, 30(10): 58-67.
Nian Heng, Zhou Yijie, Zeng Hengli. Fault-tolerant control technique of permanent magnet synchronous generator based on open winding configuration[J]. Transactions of China Electrotechnical Society, 2015, 30(10): 58-67.
[6] Mohapatra K K, Gopakumar K, Somasekhar V T, et al. A harmonic elimination and suppression scheme for an open-end winding induction motor drive[J]. IEEE Transactions on Industrial Electronics, 2003, 50(6): 1187-1198.
[7] Kodumur M R E, Kunisetti V P K, Thippiripati V K. Modified predictive torque and flux control for open end winding induction motor drive based on ranking method[J]. IET Electric Power Applications, 2018, 12(4): 463-473.
[8] Kalaiselvi J, Srinivas S. Bearing currents and shaft voltage reduction in dual-inverter-fed open-end winding induction motor with reduced CMV PWM methods[J]. IEEE Transactions on Industrial Electro- nics, 2015, 62(1): 144-152.
[9] Shajjad C, Patrick W W, Chintan P, et al. A multi- level converter with a floating bridge for open-end winding motor drive applications[J]. IEEE Transa- ctions on Industrial Electronics, 2016, 63(6): 5366- 5375.
[10] 袁渊, 朱孝勇, 左月飞, 等. 共直流母线开绕组电机的移相解耦控制策略[J]. 电工技术学报, 2019, 34(22): 4670-4677.
Yuan Yuan, Zhu Xiaoyong, Zuo Yuefei, et al. Decoupled SVPWM control strategy for open winding permanent magnet synchronous motor with common DC bus[J]. Transactions of China Electro- technical Society, 2019, 34(22): 4670-4677.
[11] 年珩, 曾恒力, 周义杰. 共直流母线开绕组永磁同步电机系统零序电流抑制策略[J]. 电工技术学报, 2015, 30(20): 40-48.
Nian Heng, Zeng Hengli, Zhou Yijie. Zero sequence current suppression strategy for open winding permanent magnet synchronous motor with common DC bus[J]. Transactions of China Electrotechnical Society, 2015, 30(20): 40-48.
[12] 杨淑英, 姚乐, 张兴, 等. 共直流母线开绕组异步电机零序环流抑制策略研究[J]. 中国电机工程学报, 2018, 38(12): 3688-3698.
Yang Shuying, Yao Le, Zhang Xing, et al. Research on scheme of zero-sequence currents suppression for open-end winding induction motor with common DC bus[J]. Proceedings of the CSEE, 2018, 38(12): 3688-3698.
[13] Somasekhar V T, Gopakumar K, Pittet A, et al. PWM inverter switching strategy for a dual two-level inverter fed open-end winding induction motor drive with a switched neutral[J]. IET Electric Power Application, 2002, 4(1): 152-160.
[14] Zhao Wenxiang, Wu Binyu, Qian Chen, et al. Fault- tolerant direct thrust force control for a dual inverter fed open-end winding linear vernier permanent- magnet motor using improved SVPWM[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7458-7467.
[15] 朱孝勇, 卜霄霄, 左月飞, 等. 基于解耦调制方式的共直流母线开绕组永磁电机容错控制[J]. 中国电机工程学报, 2019, 39(10): 3056-3064.
Zhu Xiaoyong, Bu Xiaoxiao, Zuo Yuefei, et al. Fault-tolerant control for open winding permanent magnet motor system with common DC bus based on decoupled modulation strategy[J]. Proceedings of the CSEE, 2019, 39(10): 3056-3064.
[16] 李春杰, 黄文新, 卜飞飞, 等. 具有升压和容错功能的开绕组感应电机驱动系统[J]. 电工技术学报, 2017, 32(5): 97-104.
Li Chunjie, Huang Wenxin, Bu Feifei, et al. An open-end winding induction motor driver with Boost and fault-tolerant function[J]. Transactions of China Electrotechnical Society, 2017, 32(5): 97-104.
[17] Zhu Bin, Tan Cheng, Mohammad F, et al. Postfault zero-sequence current injection for open-circuit diode/switch failure in open-end winding PMSM machines[J]. IEEE Transactions on Industrial Elec- tronics, 2019, 66(7): 5124-5132.
[18] Restrepo J A, Berzoy A, Ginart A E, et al. Switching strategies for fault tolerant operation of single DC- link dual converters[J]. IEEE Transactions on Power Electronics, 2012, 27(2): 509-518.
[19] Ruan Chenhui, Hu Wei, Nian Heng, et al. Open-phase fault control in open-winding PMSM system with common DC bus[C]//IEEE Applied Power Electro- nics Conference and Exposition (APEC), Anaheim, USA, 2019: 1052-1056.
[20] Hu Wei, Ruan Chenhui, Nian Heng, et al. Simplified modulation scheme for open-end winding PMSM system with common DC bus under open-phase fault based on circulating current suppression[J]. IEEE Transactions on Power Electronics, 2020, 35(1): 10-14.
[21] 吕康飞, 董新伟, 刘丽丽, 等. 考虑零序电流抑制的开绕组永磁同步电机断相故障下统一调制策略[J]. 电工技术学报, 2020, 35(11): 2387-2395.
Lü Kangfei, Dong Xinwei, Liu Lili, et al. The unified modulation scheme of open-end winding PMSM with common DC bus under the open-phase fault con- sidering the suppression of zero-sequence current[J]. Transactions of China Electrotechnical Society, 2020, 35(11): 2387-2395.
Fault-Tolerant Direct Torque Control for Open-End Winding Permanent Magnet Synchronous Motor with Common DC Bus Under Open Phase Circuit
Abstract In order to further improve the operation performance of open-end winding permanent magnet synchronous motor (OEW-PMSM) with common DC bus under open phase circuit, a fault-tolerant direct torque control (F-DTC) based on improved space vector pulse width modulation (SVPWM) was proposed in this paper. Firstly, the difference in DTC system for OEW-PMSM under fault-free condition and open phase circuit condition was analyzed. Accordingly, the controller of electromagnetic torque and stator flux of DTC was modified, and the controller of zero-sequence current was removed. By utilizing the modified controller, the reference stator voltage can be generated. However, its corresponding actual value was difficult to obtain if the SVPWM module of fault-free condition was used. For this reason, a novel SVPWM strategy was proposed by analyzing the voltage vectors generated by the remaining healthy phases. Finally, the proposed F-DTC was verified on a 1kW OEW-PMSM. The results show that the proposed F-DTC has small ripples of torque and stator flux even under open phase circuit.
keywords:Open-end winding permanent magnet synchronous motor (OEW-PMSM), open phase circuit, fault-tolerant direct torque control (F-DTC), electromagnetic torque
DOI: 10.19595/j.cnki.1000-6753.tces.191393
中图分类号:TM351
林晓刚 男,1990年生,博士研究生,研究方向为永磁同步电机控制。E-mail: XG_LIN_NUAA@126.com(通信作者)
黄文新 男,1966年生,教授,博士生导师,研究方向为电机及其控制、新型风力发电技术、电能变换、航空电源等。E-mail: huangwx@nuaa.edu.cn
收稿日期2019-10-28
改稿日期 2019-12-16
国家自然科学基金(51777096)和江苏省研究生科研创新计划(KYCX17_0262)资助项目。
(编辑 崔文静)