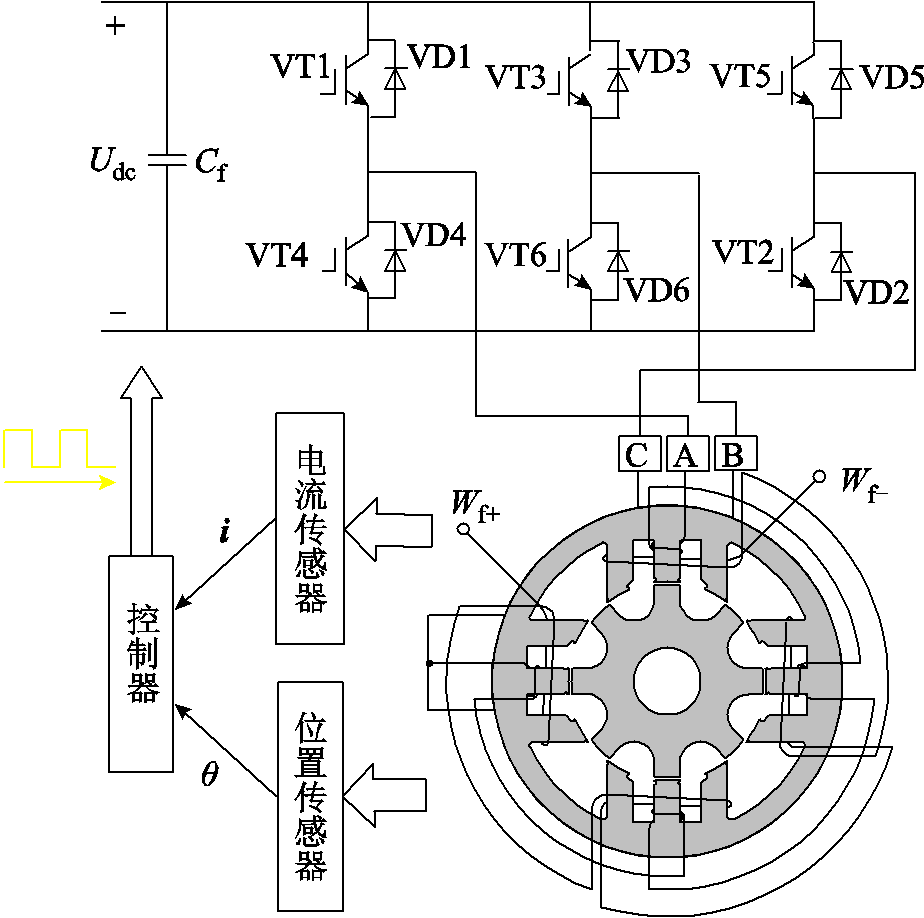
图1 基于全桥变换器的电励磁双凸极电机驱动系统
Fig.1 DSEM drive system based on full-bridge inverter
摘要 故障诊断是高可靠性电励磁双凸极电机驱动控制系统的关键技术。该文对双凸极电机驱动控制系统功率变换器单管开路故障诊断技术进行研究。功率管开路故障按形成原因可分为驱动信号丢失引起的开路故障与功率管损坏引起的开路故障。文中对两种故障类型的特点与危害进行了阐述,并分析其对不同控制方式下反电势电流的影响。提出基于反电势电流的功率变换器单管开路故障诊断方法,实现对两种故障类型的诊断,并及时对控制策略进行调整:在功率管损坏引起的开路故障发生时,不能对故障管同桥臂的功率管进行斩波以避免故障升级。最后通过实验验证了所提方法的有效性。
关键词:反电势电流 开路 故障诊断 电励磁双凸极电机
军用、航空航天、工业自动化等领域对电机驱动系统有着高可靠性要求[1-5]。电机驱动系统由电机本体、功率变换器和控制电路组成。电励磁双凸极无刷直流电机是在开关磁阻电机的基础上发展而来的一种新型电机,具有结构简单、调压方便和可靠性高的特点[6-8]。相对而言,在整个电机驱动系统中,主功率变换器功率器件和驱动控制电路是最易发生故障的环节。当发生故障后,电机驱动控制系统的工作状态将发生改变,如果不能及时检测故障的发生,诊断故障的位置,将可能造成驱动控制系统故障升级、危害扩大等一系列严重后果。因此,对主功率变换器功率器件与驱动控制电路的故障进行在线检测与诊断是故障危害评估的基础[9-11],也是维持整个系统可靠性的关键。
主功率变换器功率器件故障主要分为短路故障和开路故障。其中短路故障危害较为严重,当与发生短路故障的功率管同桥臂的另一功率管开通时,此桥臂上的两个功率管直通会使母线电流急剧上升,导致母线严重过电流。对此类故障,控制系统将采取保护措施封锁变换器的驱动信号,通常通过熔断器将短路故障转变为开路故障,因此对功率变换器的故障检测与诊断多集中在功率器件开路故障[12-13]。检测功率变换器开路故障的方法有数据驱动方法和非数据驱动方法[14]。数据驱动方法需要采集大量的电路信号,通过信号预处理、特征提取、训练分类等步骤实现故障分类,该方法的特点是不需要预先了解系统内部机理,但是处理速度较慢,难以满足在线检测诊断要求[15-16]。而非数据驱动方法根据电路的工作原理实现对电路故障的检测,具有处理速度快的特点[17]。文献[18]将三相电流传感器置于各相桥臂上,同时结合功率管驱动信号和二极管续流信号进行逻辑处理,可实现对基于全桥变换器的电励磁双凸极电机(Doubly Salient Electromagnetic Motor, DSEM)主功率电路的功率管故障发生位置在线诊断。文献[19]理论分析了电励磁双凸极电机中性点电压在正常状态和单管开路故障状态下的变化规律,利用电机中性点电压变化实现了单管开路故障的在线诊断。功率管单管开路故障主要分为两种类型:故障类型Ⅰ是驱动信号丢失,它的表现形式是IGBT不能导通,但是续流二极管仍可导通;故障类型Ⅱ是功率管损坏,它的表现形式是IGBT和续流二极管均不能导通[20]。目前,还没有针对这两种具体开路故障类型进行区分的诊断方法。
本文首先介绍了基于全桥变换器的电励磁双凸极电机驱动系统,对全桥功率变换器功率器件单管两种不同类型的开路故障形成原因及影响进行了阐述。其次,在分析两种开路故障类型对不同控制方式下反电势(Back Electromotive Force, BEMF)电流影响的基础上,提出了基于反电势电流的单管开路故障诊断方法,实现了对两种具体开路故障类型的诊断。最后通过电励磁双凸极电机实验平台验证了本文所提方法的有效性。
基于全桥变换器的电励磁双凸极电机驱动系统拓扑如图1所示。
图1 基于全桥变换器的电励磁双凸极电机驱动系统
Fig.1 DSEM drive system based on full-bridge inverter
电励磁双凸极电机主要物理参数之间的关系可以用数学模型来描述,包括电压方程、磁链方程和转矩方程。其中,电压方程为
 (1)
(1)式中,up为相电压;ip为相电流; 为相磁链。
为相磁链。
磁链方程为
 (2)
(2)式中,Lp为相绕组自感;Lpf为相绕组与励磁绕组之间的互感;if为励磁电流。
转矩方程为
 (3)
(3)式中,Tp为相输出转矩;Tpr为磁阻转矩;Tpe为励磁转矩;θ为转子位置角。
电励磁双凸极电机理想电感波形如图2所示。可将一个周期内的电感波形分为三个区间:0°~120°、120°~240°和240°~360°。
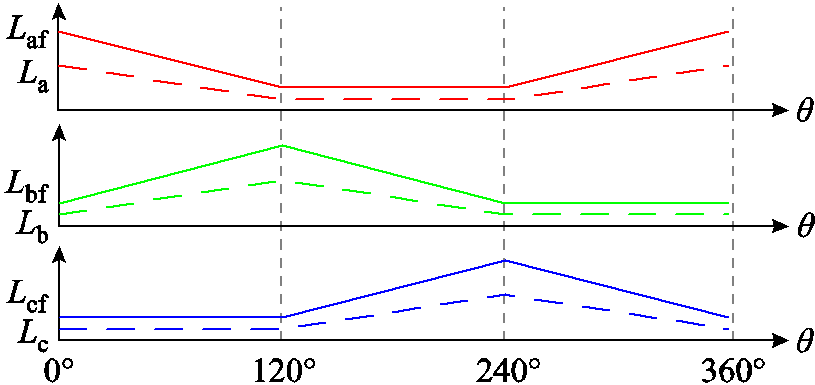
图2 理想电感波形
Fig.2 Idealized inductance waveforms
电励磁双凸极电机理想电动势波形如图3所示。在所有工作状态下全桥电路均为两相导通,因此,在各工作状态下三相电动势分别为正、负和零。
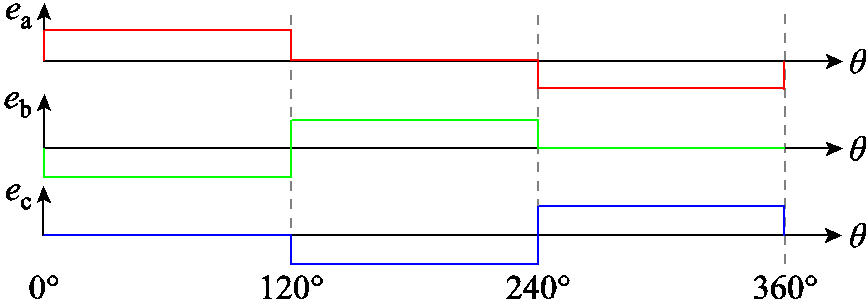
图3 理想电动势波形
Fig.3 Idealized electromotive force waveforms
由电感波形和转矩方程可以得到电励磁双凸极电机的三种驱动控制方式,见表1。其中,控制方法1给电感量增大的相绕组通负电,给电感量减小的相绕组通正电,电感量不变的相绕组不通电,根据转矩方程,电感量增大或减小的相输出转矩大于零,电感量不变的相输出转矩为零;控制方法2电感量增大的相绕组不通电,给电感量减小的相绕组通正电,给电感量不变的相绕组通负电,根据转矩方程,电感量增大或不变的相输出转矩为零,电感量减小的相输出转矩大于零;控制方法3给电感量增大的相绕组通负电,电感量减小的相绕组不通电,给电感量不变的相绕组通正电,根据转矩方程,电感量减小或不变的相输出转矩为零,电感量增大的相输出转矩大于零。在对控制策略进行选择时,三种驱动控制方式的优先级依次为:控制方法1、控制方法2和控制方法3,即优先采用控制方法1进行驱动,当控制方法1中需导通的功率管发生故障时,驱动方式转换到控制方法2,若控制方法2中也需导通此故障功率管,驱动方式再转换到控制方法3[21]。
表1 电励磁双凸极电机3种驱动控制方式
Tab.1 Three control strategies of DSEM motor

区间控制方法1控制方法2控制方法3 0°~120°VT1,VT6VT1,VT2VT5,VT6 120°~240°VT3,VT2VT3,VT4VT1,VT2 240°~360°VT5,VT4VT5,VT6VT3,VT4
在基于全桥变换器的电励磁双凸极电机驱动系统中,参考文献[20],变换器单管开路故障主要分为两种类型,以故障位置在下管为例,如图4所示。故障类型Ⅰ是驱动信号丢失,它的表现形式是IGBT中电流不能流通,但是续流二极管中电流仍可流通。引起故障类型Ⅰ的原因可能是接线不良、驱动断线等原因导致的驱动信号开路。故障类型Ⅱ是功率管损坏,它的表现形式是IGBT和续流二极管中电流都不能流通。引起故障类型Ⅱ的原因可能是过电流烧毁功率管导致的开路。
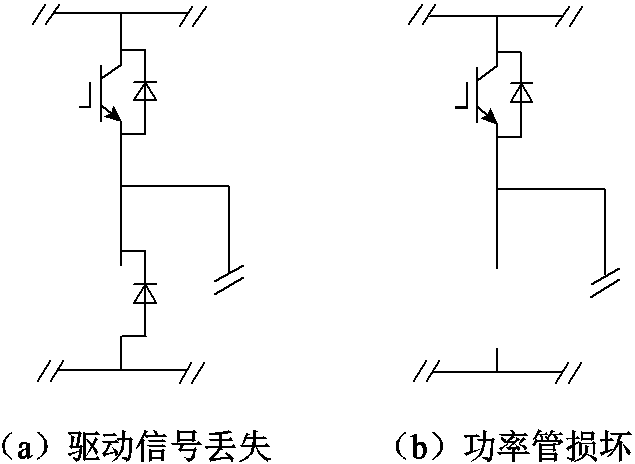
图4 单管开路故障类型
Fig.4 Open circuit fault types
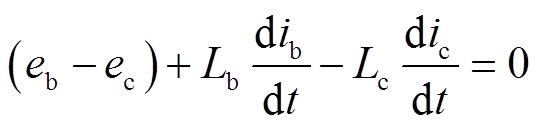
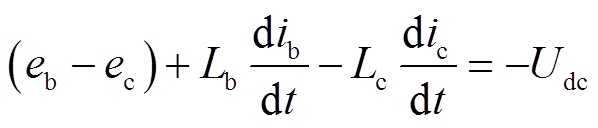
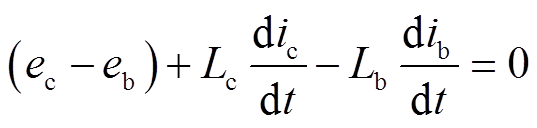
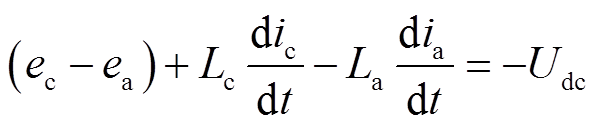
由于发生故障类型Ⅰ开路故障时IGBT无法导通,使得当前区间的电流无法流入相绕组,从而导致在当前区间无转矩输出,降低了系统的转矩输出能力。而当发生故障类型Ⅱ开路故障时IGBT和续流二极管均无法导通,这不仅会阻止当前区间电流流入相绕组,导致无转矩输出,而且会影响其他区间的工作安全。以故障位置在VT6为例,图5为电路在120°~240°区间导通和续流情况,当故障管所在桥臂的上桥臂功率管VT3关断时,开路故障类型Ⅰ的下桥臂续流二极管VD6仍可正常续流,而开路故障类型Ⅱ的下桥臂续流二极管VD6无法续流,由于电感电压为
 (4)
(4)续流回路突然开路使电流瞬间降为零,从而在故障管VT6所在桥臂的上桥臂形成电压尖峰,过电压反向击穿功率管VT3,会使故障范围进一步扩大。因此需要对以上两种故障类型进行诊断,从而对控制策略进行相应调整:当故障类型Ⅱ开路故障发生时,不能对故障管同桥臂的功率管进行斩波。
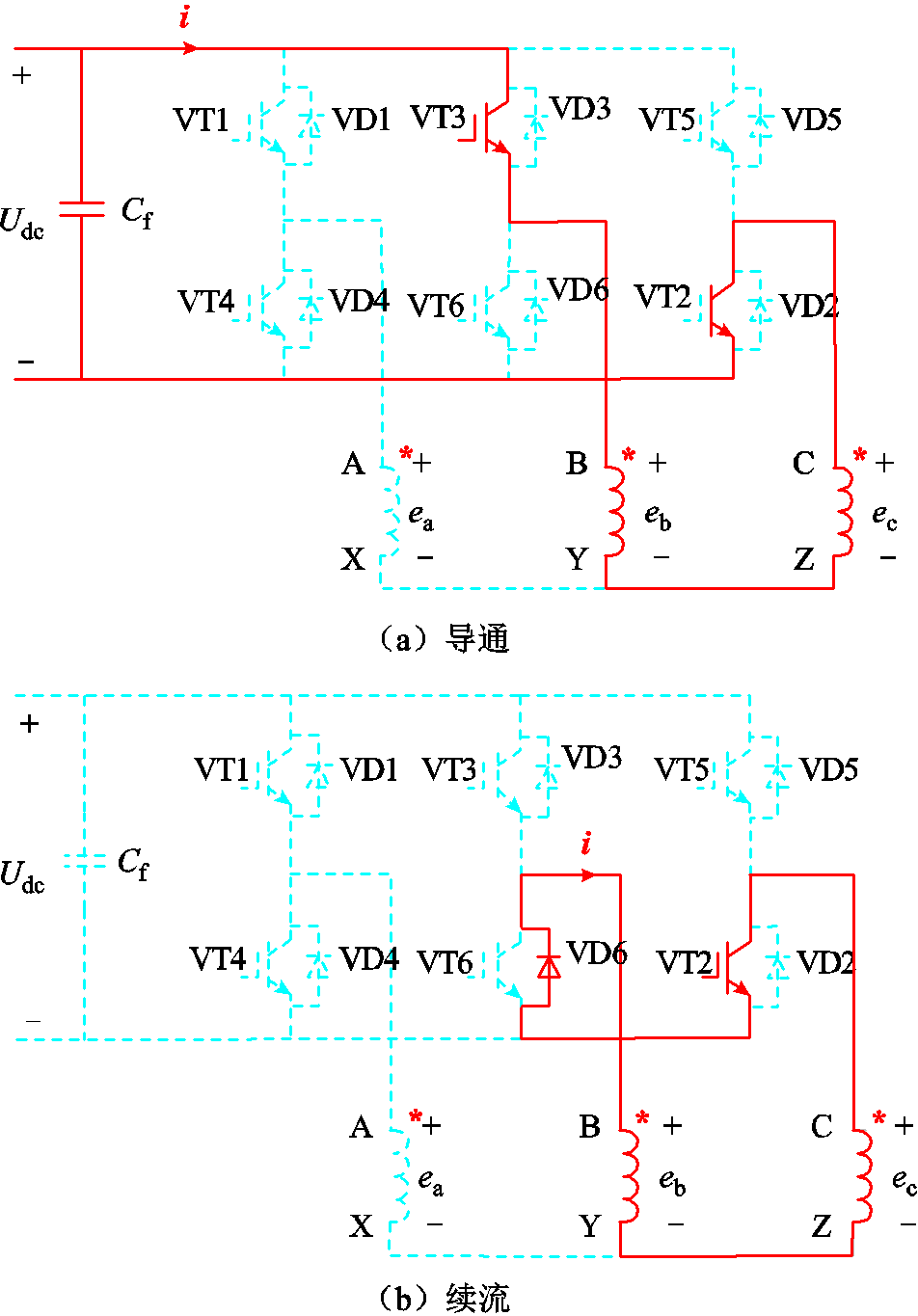
图5 单区间的电路电流示意图
Fig.5 Example of circuit current schematic of an interval
基于全桥变换器的三相电励磁双凸极电机在所有工作状态下只有两相为工作相,剩余的一相为非工作相。非工作相的相电动势变化,会在非工作相和工作相的回路中产生电流,称为反电势电流。当采用控制方法1时,非工作相电动势在理想状态下为零,此时反电势电流为零;而在控制方法2和控制方法3下,非工作相电动势不为零,存在明显的反电势电流。
以功率管VT1发生开路故障时的情况为例,在0°~120°区间,如图3所示,此时相电动势ea为正,eb为负,ec为零。
2.1.1 控制方法1
此时工作相为A相和B相,非工作相为C相。由于VT1故障,三相电流均为零。
2.1.2 控制方法2
此时工作相为A相和C相,非工作相为B相。若VT1和VT2在ON-ON和PWM-ON模式下,如图6所示,电路中无主电流i1,而反电势电流i2流经B相、C相、VT2和VD6构成的回路。此时功率管VT1无论是开路故障类型Ⅰ还是开路故障类型Ⅱ,对反电势电流回路均无影响。由于功率管、二极管和电阻的压降远小于相电动势,回路电压方程为
 (5)
(5)式中,La、Lb与Lc分别为A、B、C相自感。由于Lc≈0,可将其忽略,此时反电势电流变化率可表示为
 (6)
(6)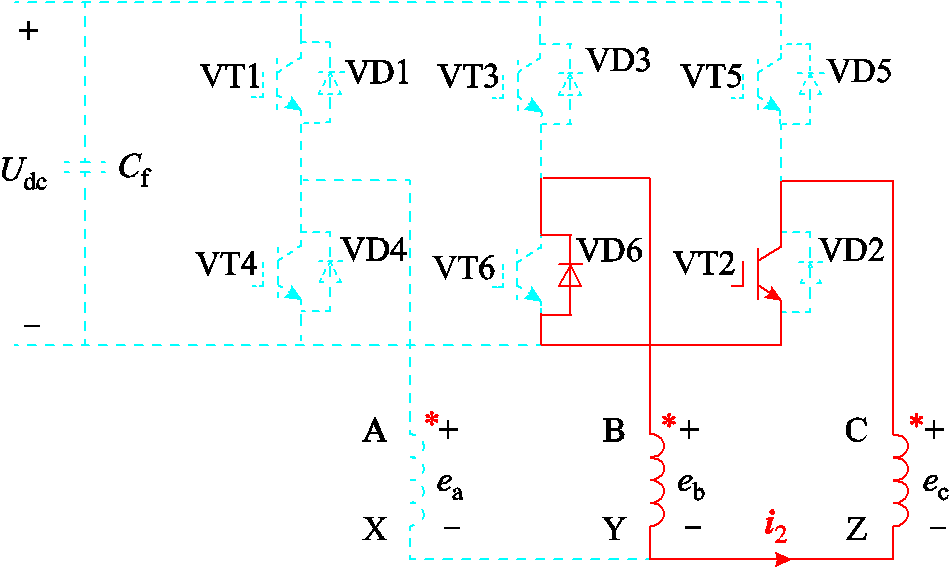
图6 ON-ON和PWM-ON模式下的电流示意图
Fig.6 Circuit current diagram in ON-ON and PWM-ON
在ON-PWM模式下,如图7所示,电路中无主电流i1,反电势电流i2流经B相、C相、VD5和VD6回馈给电源。此时功率管VT1无论是开路故障类型Ⅰ还是开路故障类型Ⅱ,对反电势电流回路均无影响。
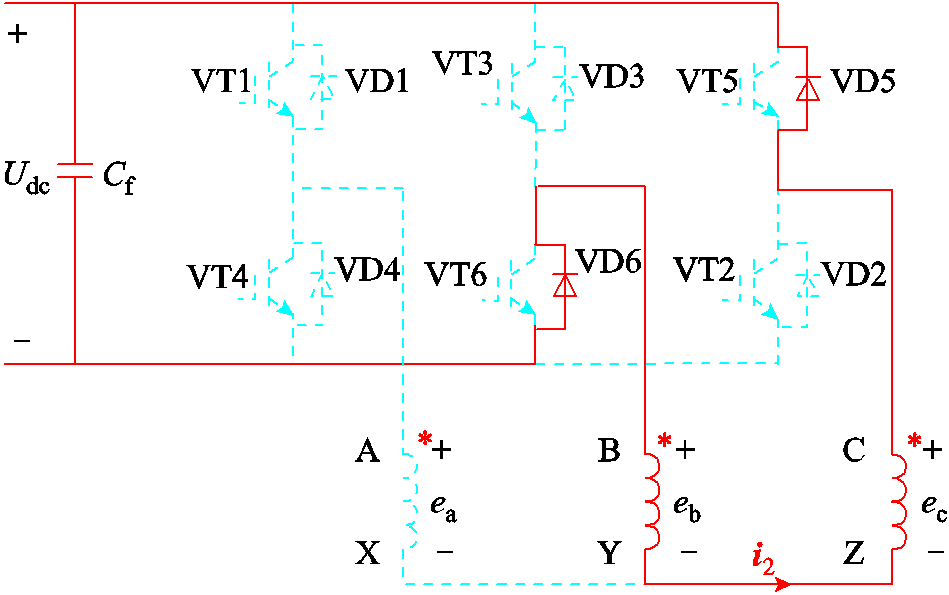
图7 ON-PWM模式下的电流示意图
Fig.7 Circuit current diagram in ON-PWM
由于功率管、二极管和电阻的压降远小于相电势和母线电压,回路电压方程为
 (7)
(7)由于Lc≈0,可将其忽略,此时反电势电流变化率可表示为
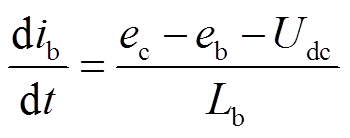 (8)
(8)由式(6)和式(8),得到反电势电流变化。如图8所示,在PWM-ON模式下反电势电流不断上升,而在ON-PWM模式下上管导通时反电势电流上升,上管关断时反电势电流快速下降,反电势电流在一个斩波周期中被抑制。
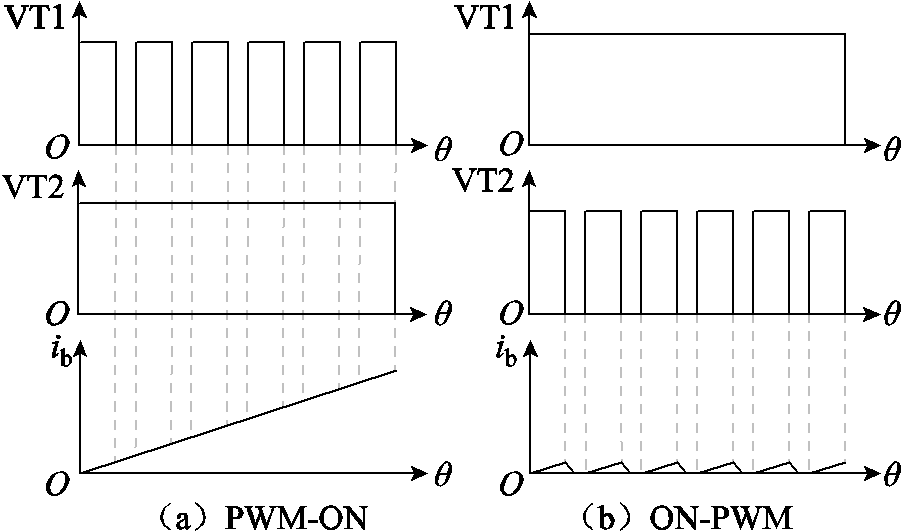
图8 控制方法2下的反电势电流变化示意图
Fig.8 BEMF current diagram under control method 2
2.1.3 控制方法3
若采用控制方法3,此时工作相为C相和B相,非工作相为A相。在ON-ON模式下,电流流通路径如图9所示,主电流i1流经VT5、C相、B相和VT6,反电势电流i2流经A相、VD1、VT5和C相构成的回路。
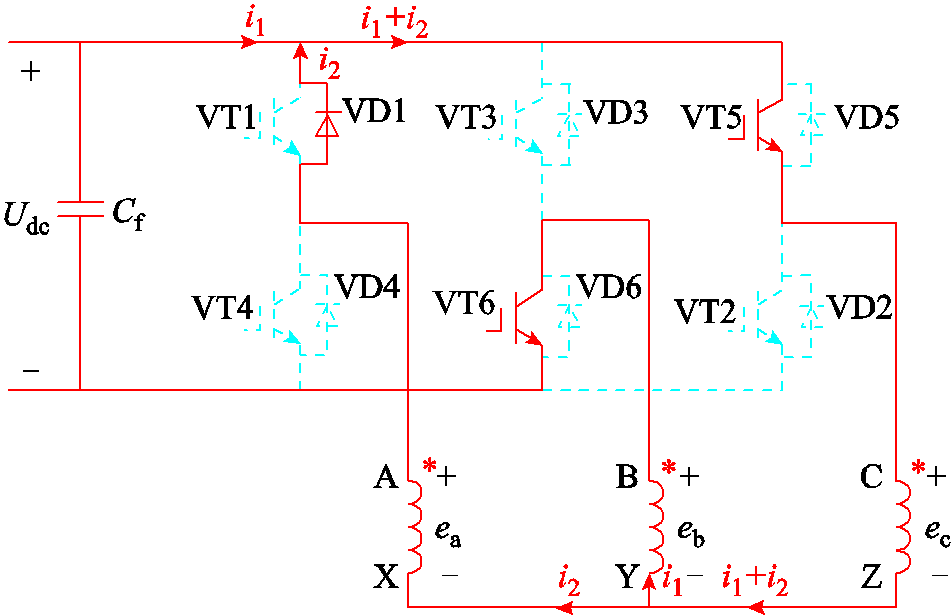
图9 ON-ON模式下的电流示意图
Fig.9 Circuit current diagram in ON-ON
回路电压方程为
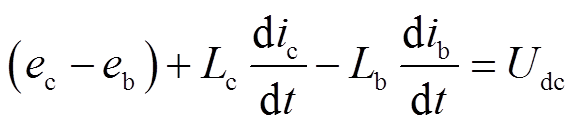 (9)
(9)当VT5或VT6关断时,主电流i1经VD2或VD3续流,回路电压方程为
 (10)
(10)当功率管VT1发生故障类型Ⅱ开路故障时,二极管VD1无法导通,因此电路中无反电势电流。而当功率管VT1发生故障类型Ⅰ开路故障时,VD1仍可续流,以下针对发生该类故障时的情况进行分析。
若对VT5和VT6采用PWM-ON模式,如图10所示,主电路电流i1经VD2、C相、B相和VT6续流,反电势电流i2经A相、VD1、VD2和C相回馈给电源,此时反电势电流回路电压方程为
 (11)
(11)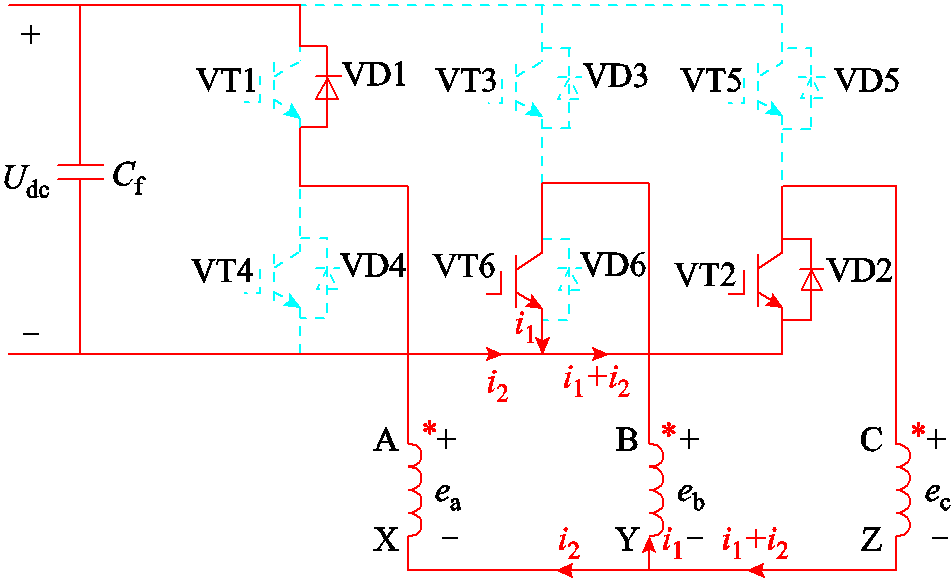
图10 PWM-ON模式下的电流示意图
Fig.10 Circuit current diagram in PWM-ON
若对VT5和VT6采用ON-PWM模式,如图11所示,主电路电流i1经VD3、VT5、C相和B相续流,反电势电流i2经A相、VD1、VD2和C相构成的回路,此时反电势电流回路电压方程为
 (12)
(12)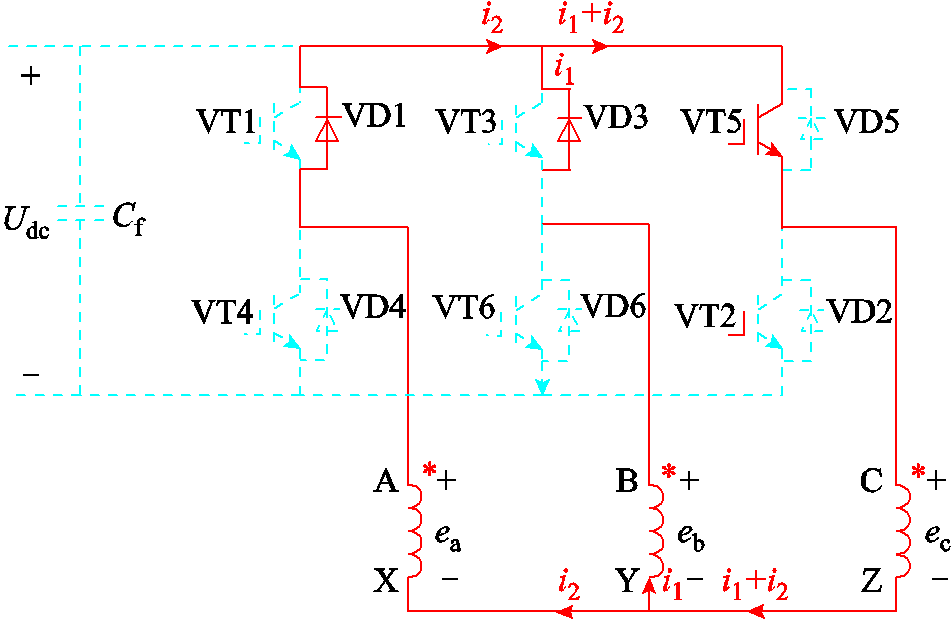
图11 ON-PWM模式下的电流示意图
Fig.11 Circuit current diagram in ON-PWM
结合式(9)~式(12),由于Lc≈0,可将其忽略,对VT5和VT6采用PWM-ON模式和ON-PWM模式时反电势电流的变化率可分别表示为
 (13)
(13) (14)
(14)结合式(13)和式(14),得到反电势电流变化如图12所示,在PWM-ON模式下上管导通时反电势电流下降,上管关断时反电势电流快速上升,反电势电流在一个斩波周期中被抑制。而在ON-PWM模式下反电势电流在一个斩波周期中呈不断下降的趋势。
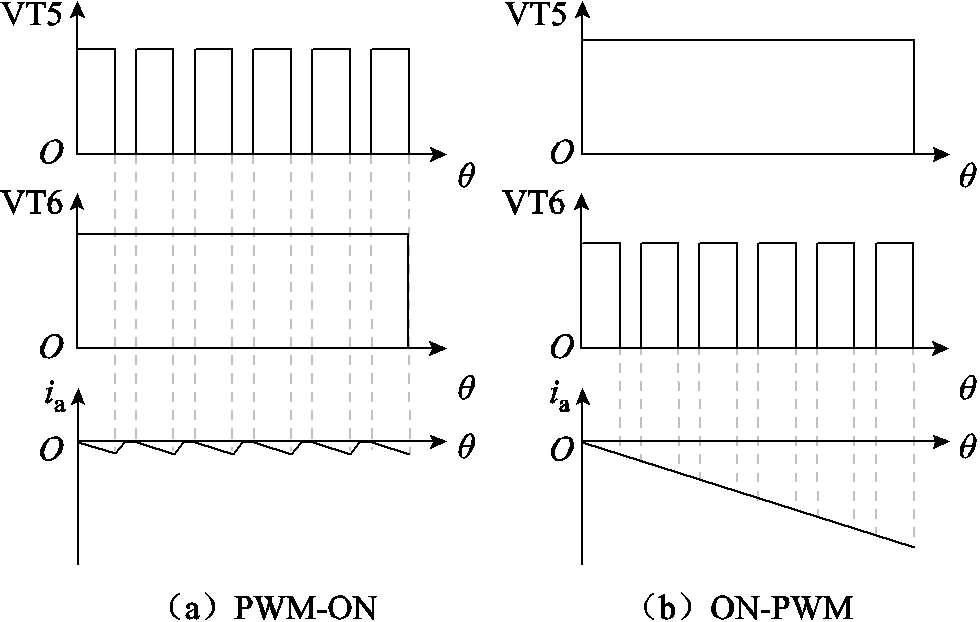
图12 控制方法3下的反电势电流变化示意图
Fig.12 BEMF current diagram under control method 3
全桥变换器单管开路故障的故障位置总共有6个:VT1~VT6。在各工作状态下,导通的两个功率管中任一发生开路故障都将使该状态下的相电流为零。例如,在0°~120°时,VT1或VT6任一功率管发生开路故障都将导致相电流为零。因此,只检测相电流大小无法辨别开路故障发生的位置。
根据图3,理想相电动势逻辑可表示为
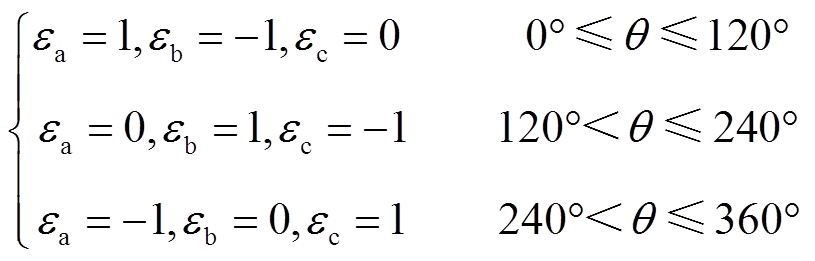 (15)
(15)取电流特征信号为
 (16)
(16)由此,电路故障信号逻辑可表示为
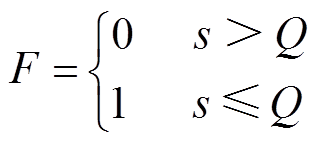 (17)
(17)式中,Q为电流检测中所设阈值。由于发生开路故障时各相电流均为零,理论上来说电流阈值可以设置为大于零小于相电流的任意值,但是考虑到实际中传感器测量等存在误差,电流阈值的下限需大于该误差的50%。同时,为满足各工况下都可以快速准确检测开路故障的发生,电流阈值的上限需小于空载时的电流。若针对的是某一固定工况条件下的故障检测,电流阈值的上限只需小于该工况下的相电流。
需要注意的是,在电路正常换相时也会存在F=1的区间,如图13所示,为避免误判,在换相区间内不进行故障诊断。同时,考虑到电路噪声信号对故障检测的影响,在设置电路故障信号逻辑以外,添加了时间信号逻辑。a为所设时间阈值,系统需在检测F=1持续的时间t大于a时才判断为发生开路故障,时间信号逻辑可表示为
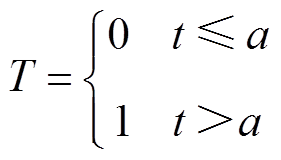 (18)
(18)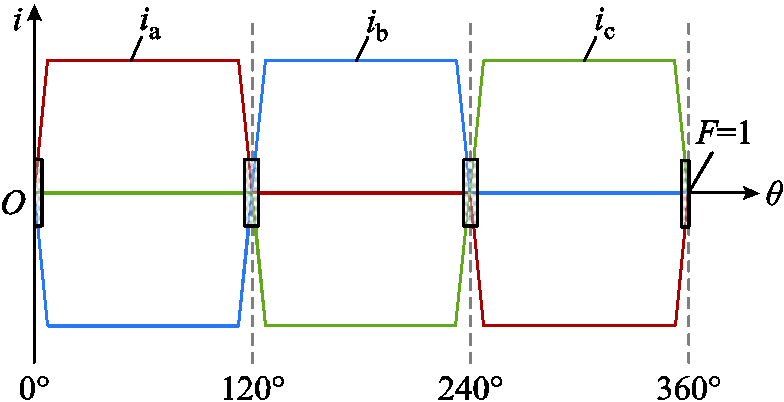
图13 考虑换相的相电流波形
Fig.13 Phase current waveforms considering the commutation interval
当且仅当F∩T=1时,系统判断发生开路故障。故障发生的时间会对诊断方法产生一定的影响,若功率管在非工作区间、换相以及换相前小于时间a的区间内发生故障,系统无法立刻将其诊断出来,但是在换相结束后进入需导通故障管运行的区间时,故障即可被诊断出来。通过提高采样频率可以缩短故障检测所需时间,从而在一定程度上减小故障发生时间对诊断方法的影响。
当系统判断为发生开路故障,容错控制将由控制方法1转而采用控制方法2,导通功率管VT1和VT2,此时若F∩T=0,说明是VT6管发生开路故障;而若F∩T=1,容错控制将由控制方法2转而采用控制方法3,导通功率管VT5和VT6,此时F∩T=0,说明是VT1发生开路故障。
通过这种方法可以辨别开路故障发生的位置,但还是难以辨别功率管开路故障是故障类型Ⅰ还是故障类型Ⅱ,因此,还需要通过检测反电势电流大小来辨别故障管的具体故障类型。
由表1,一般情况下优先采用控制方法1,当桥臂下功率管发生开路故障时采用控制方法2,桥臂上功率管发生开路故障时采用控制方法3。根据反电势电流的变化情况,以在一定的控制策略下反电势电流是否存在作为依据,可实现对单管开路故障具体类型的诊断,其判据见表2。
以VT1发生开路故障为例,0°~120°时采用控制方法3,导通VT5和VT6。此时若采用PWM-ON 模式,反电势电流被抑制;而若采用ON-PWM模式,反电势电流将快速下降。因此,通过采用ON-PWM模式,检测反电势电流是否存在来判断故障的具体类型。如果检测出反电势电流,说明功率管故障类型是故障类型Ⅰ;反之,如果没有检测出反电势电流,说明功率管故障类型是故障类型Ⅱ。图14所示为故障类型诊断的流程。
表2 单管开路故障类型判据
Tab.2 Open circuit fault type criterion

判断依据故障位置斩波策略反电势电流故障类型 控制方法1正常ON-PWM/PWM-ON—— 0°~120°控制方法3VT1ON-PWM有Ⅰ 无Ⅱ 120°~240°控制方法2VT2PWM-ON有Ⅰ 无Ⅱ 120°~240°控制方法3VT3ON-PWM有Ⅰ 无Ⅱ 240°~360°控制方法2VT4PWM-ON有Ⅰ 无Ⅱ 240°~360°控制方法3VT5ON-PWM有Ⅰ 无Ⅱ 0°~120°控制方法2VT6PWM-ON有Ⅰ 无Ⅱ
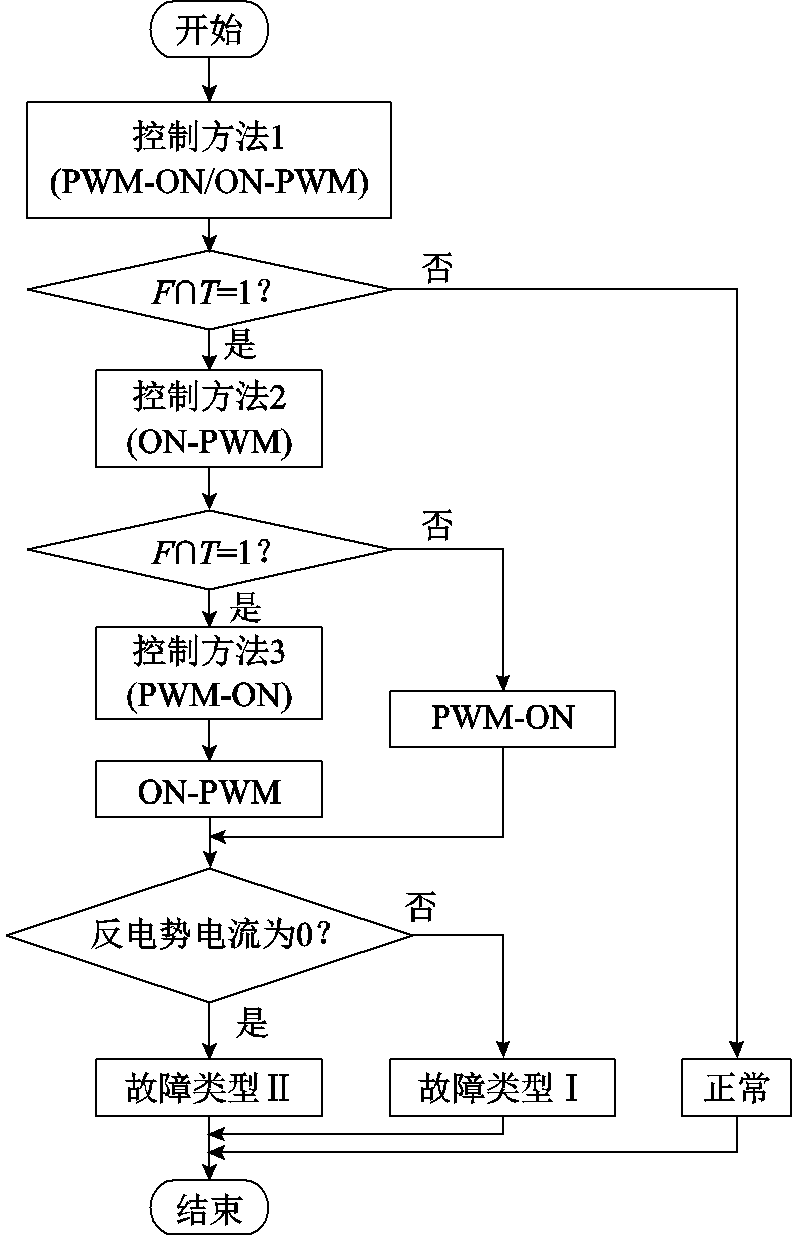
图14 故障类型诊断流程
Fig.14 Fault type diagnosis flowchart
本文通过搭建12/8极电励磁双凸极电机实验平台验证所提方法的有效性,测试平台如图15所示。电机驱动系统工作转速为1 000r/min,采样频率为30kHz,对应该工况选取的电流阈值Q下限为0.2A,时间阈值a为8个采样点所对应的时间0.26ms。

图15 DSEM驱动系统实验平台
Fig.15 Driving system experiment platform of DSEM
本实验通过在线屏蔽开关管VT1驱动信号来模拟故障类型Ⅰ开路故障,电流波形如图16a所示。故障特征信号s在换相区间会出现小于电流阈值Q的情况,为避免误判,在该区间内不进行故障诊断。同时,考虑到电路噪声信号对故障检测的影响,为避免误触发故障信号,当VT1发生故障类型Ⅰ开路故障时,诊断算法经过0.26ms检测出VT1发生开路故障,并在0o~120o区间进入到控制方法3,PWM-ON模式。此时,通过检测反电势电流信号,判定故障类型具体为VT1故障类型Ⅰ,检测时间为0.3ms。由此,系统调整控制策略:在0o~120o进入控制方法3,ON-PWM模式。
故障类型Ⅱ开路故障可通过使用断路器来进行模拟。实验平台中所采用的全桥变换器的6个功率管是集成封装的,图17是模拟VT1发生故障类型Ⅱ开路故障的断路器使用位置示意图。通过使用S1可将IGBT和续流二极管同时从功率变换器中断开,使电流在两者中都无法流通,这与实际发生故障类型Ⅱ开路故障时的电路对外表现特征是一致的。VT1管发生故障类型Ⅱ开路故障时的电流波形如图16b所示。与发生故障类型Ⅰ开路故障时不同的是:在0o~120o区间进入到控制方法3、PWM-ON模式时,系统检测反电势电流信号为零,判定故障类型为VT1管故障类型Ⅱ。由此,系统在120°~240°区间内,采用控制方法1、PWM-ON模式,从而避免了功率管击穿现象的出现。
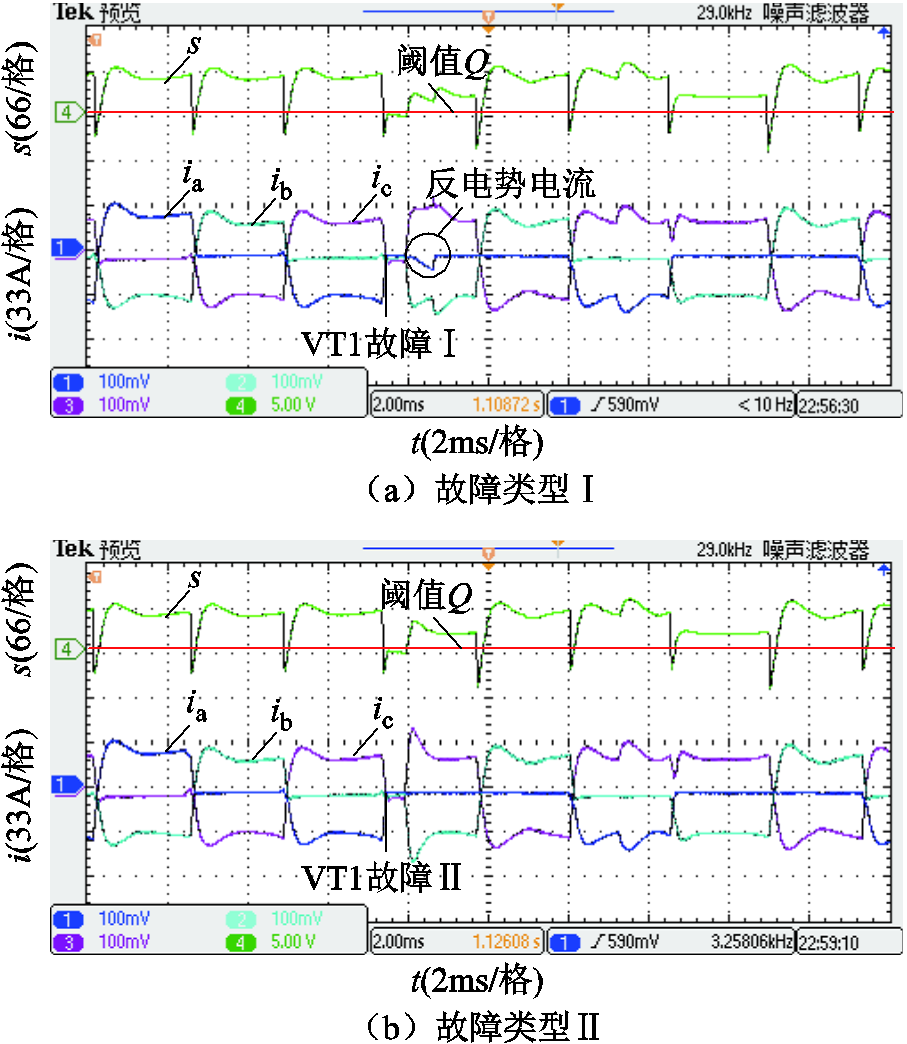
图16 VT1开路故障电流波形
Fig.16 Current waveforms under VT1 open circuit fault

图17 断路器使用位置示意图
Fig.17 Diagram of breaker position
本文对电励磁双凸极电机驱动电路单管开路故障诊断技术进行了研究,提出了基于反电势电流的单管开路故障诊断方法。本文的主要工作与结论如下:
1)阐述了全桥功率变换器功率管单管开路故障两种不同类型的形成原因及表现形式,在此基础上分析了两者对功率变换器正常运行的影响。当开路故障类型为功率管损坏时,不能对故障管同桥臂的功率管进行斩波,以避免过电压将其反向击穿而造成故障范围的进一步扩大。
2)理论分析并定性比较了两种故障类型对不同控制策略下反电势电流变化趋势的影响,在此基础上提出基于反电势电流的单管开路故障诊断方法,并给出了基于反电势电流的单管开路故障类型诊断依据和流程。正常运行时,驱动电路在控制方法1下采用PWM-ON或ON-PWM斩波。当发生开路故障时,驱动系统改变控制策略,在控制方法2下采用PWM-ON斩波,在控制方法3下采用ON-PWM斩波。若检测存在反电势电流,说明开路故障类型为驱动电路失效,反之为功率管损坏。
3)对现有的驱动控制系统硬件不作改动,仅进行软件更新,通过电励磁双凸极电机实验平台验证了本文所提方法的有效性。
参考文献
[1] 张飞龙, 王晓琳, 顾聪, 等. 基于电机定子绕组开路的电机驱动和充放电集成系统研究[J]. 电工技术学报, 2019, 34(18): 3778-3787. Zhang Feilong, Wang Xiaolin, Gu Cong, et al. Research on integrated system of motor drive and charging/discharging based on open motor stator winding[J]. Transactions of China Electrotechnical Society, 2019, 34(18): 3778-3787.
[2] 张超, 胡鑫, 朱孝勇, 等. 基于预测控制的无电解电容功率变换器电机驱动系统[J]. 电工技术学报, 2018, 33(24): 5649-5658. Zhang Chao, Hu Xin, Zhu Xiaoyong, et al. Electrolytic capacitor-less motor drive system based on predictive control[J]. Transactions of China Electrotechnical Society, 2018, 33(24): 5649-5658.
[3] 周聪, 刘闯, 王凯, 等. 用于开关磁阻电机驱动系统的新型单电阻电流采样技术[J]. 电工技术学报, 2017, 32(5): 55-61. Zhou Cong, Liu Chuang, Wang Kai, et al. A novel single resistance current sampling technique of switched reluctance motor[J]. Transactions of China Electrotechnical Society, 2017, 32(5): 55-61.
[4] Lei Gang, Wang Tianshi, Zhu Jianguo, et al. Robust multiobjective and multidisciplinary design optimization of electrical drive systems[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(4): 409-416.
[5] Tian L, Wu L, Huang X, et al. Driving range parametric analysis of electric vehicles driven by interior permanent magnet motors considering driving cycles[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(4): 377-381.
[6] Zhang Zhuoran, Yu Li, Wang Yuting, et al. Overview and design methodology of doubly salient brushless dc generators with stator-field winding[J]. IET Electric Power Applications, 2017, 11(2): 197-211.
[7] 赵耀, 王慧贞, 肖岚, 等. 五相容错电励磁双凸极电机容错特性分析[J]. 中国电机工程学报, 2013, 33(24): 135-143. Zhao Yao, Wang Huizhen, Xiao Lan, et al. Characteristics analysis of five-phase fault-tolerant doubly salient electro-magnetic generators[J]. Proceedings of the CSEE, 2013, 33(24): 135-143.
[8] 任海英, 周波. 双凸极起动/发电机系统一体化设计与实现[J]. 中国电机工程学报, 2006, 26(24): 153-158. Ren Haiying, Zhou Bo. Integral design and implementation of doubly salient starter/ generator[J]. Proceedings of the CSEE, 2006, 26(24): 153-158.
[9] 董文婷, 李征, 徐凌宇. 基于出力相关性的风电机组非正常运行状态及故障诊断[J]. 电力系统保护与控制, 2017, 45(9): 18-25. Dong Wenting, Li Zheng, Xu Lingyu. Abnormal operational condition evaluation and fault diagnosis of wind turbine based on output power correlation[J]. Power System Protection and Control, 2017, 45(9): 18-25.
[10] 王俊年, 钱瞻, 陈茂林, 等. 基于解析冗余式的风机传动系统故障诊断[J]. 电力系统保护与控制, 2017, 45(3): 41-47. Wang Junnian, Qian Zhan, Chen Maolin, et al. Fault diagnosis of driven train system of wind turbine based on analytical redundancy relations[J]. Power System Protection and Control, 2017, 45(3): 41-47.
[11] 刘星, 姜睿智, 宋国兵, 等. 利用电流故障特征的大功率整流装置故障在线诊断方法[J]. 电力系统保护与控制, 2016, 44(22): 166-173. Liu Xing, Jiang Ruizhi, Song Guobing, et al. An on-line fault diagnosis method for power rectifier device based on fault current characteristic[J]. Power System Protection and Control, 2016, 44(22): 166-173.
[12] 张斌, 许伟奇, 戴乾军. 三相八开关容错逆变器的PMSM驱动系统FCS-MPC策略[J]. 电机与控制学报, 2019, 23(6): 81-92. Zhang Bin, Xu Weiqi, Dai Qianjun. Finite control set model predictive control for PMSM systems driven by three-phase eight-switch fault-tolerant inverter[J]. Electric Machines and Control, 2019, 23(6): 81-92.
[13] Wang Tianzhen,Xu Hao,Han Jingang. Cascaded H-bridge multilevel inverter system fault diagnosis using a PCA and multiclass relevance vector machine approach[J]. IEEE Transactions on Power Electronics, 2015, 30(12): 7006-7018.
[14] 杨俊杰, 刘思扬, 孙旭, 等. 多重交错并联开路电路故障检测[J]. 中国电机工程学报, 2019, 36(11): 3336-3343. Yang Junjie, Liu Siyang, Sun Xu, et al. Multi-phase interleaved converter open circuit fault diagnosis[J]. Proceedings of the CSEE, 2019, 36(11): 3336-3343.
[15] Chen Yu, Pei Xuejun, Nie Songgong. Monitoring and diagnosis for the DC-DC converter using the magnetic near field waveform[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5): 1634-1647.
[16] 李梦诗, 余达, 陈子明, 等. 基于深度置信网络的风力发电机故障诊断方法[J]. 电机与控制学报, 2019, 23(2): 114-122. Li Mengshi, Yu Da, Li Ziming, et al. Fault diagnosis and isolation method for wind turbines based on deep belief network[J]. Electric Machines and Control, 2019, 23(2): 114-122.
[17] 于泳, 蒋生成, 杨荣峰. 变频器IGBT开路故障诊断方法[J]. 中国电机工程学报, 2011, 31(9): 30-35. Yu Yong, Jiang Shengcheng, Yang Rongfeng. IGBT Open circuit fault diagnosis method for inverter[J]. Proceedings of the CSEE, 2011, 31(9): 30-35.
[18] 尹航, 周波, 魏佳丹. 双凸极电机主功率变换器故障在线诊断[J]. 电工技术学报, 2008, 12(10): 88-99. Yin Hang, Zhou Bo, Wei Jiadan. Study of on-line fault diagnosis of main power converter for doubly salient motor[J]. Transactions of China Electrotechnical Society, 2008, 12(10): 88-99.
[19] 胡朝燕, 周波, 魏佳丹. 双凸极电机全桥变换器单管开路故障在线诊断[J]. 中国电机工程学报, 2009, 29(33): 111-116. Hu Chaoyan, Zhou Bo, Wei Jiadan. On-line diagnosis of single transistor open-circuit fault in full-bridge converter of doubly salient electro-magnet motor[J]. Proceedings of the CSEE, 2009, 29(33): 111-116.
[20] 徐殿国, 刘晓峰, 于泳. 变频器故障诊断及容错控制研究综述[J]. 电工技术学报, 2015, 30(21): 1-12. Xu Dianguo, Liu Xiaofeng, Yu Yong. A survey on fault diagnosis and tolerant control of inverters[J]. Transactions of China Electrotechnical Society, 2015, 30(21): 1-12.
[21] Zhang Jian, Zhang Zhuoran, Yu Li, et al. Fault-tolerant control of doubly salient brushless DC motor drive under open-circuit faults[J]. IET Electric Power Applications, 2019, 13(4): 494-502.
Research on Single Power Switch Open Circuit Fault Diagnosis of Doubly Salient Eletromagnetic Motor Drive Circuit Based on the Back Electromotive Force Current
Abstract Fault diagnosis is the key technology of the control system of the double salient motor with high reliability. In this paper, the single power switch open circuit fault diagnosis technology of power converter is studied. The open circuit fault can be divided into the open circuit fault caused by the loss of drive signal and the open circuit fault caused by the power switch damage. The characteristics and damages of two fault types are described, and their effects on the back electromotive force current under different control modes are analyzed. The single power switch open circuit fault diagnosis method based on the back electromotive force current is proposed to diagnose two fault types, so that when the open circuit fault caused by the damage of the power switch occurs, the power switch of the same bridge arm of the fault switch cannot to be chopped, avoiding the extension of fault range. Finally, the effectiveness of the proposed method is verified by experiment results.
keywords:Back electromotive force (BEMF) current, open circuit, fault diagnosis, doubly salient electromagnetic motor (DSEM)
中图分类号:TM352
DOI: 10.19595/j.cnki.1000-6753.tces.191594
国家自然科学基金面上项目资助(51977108)。
收稿日期2019-11-22
改稿日期2020-04-18
夏一文 女,1997年生,硕士研究生,研究方向为电机及其控制。E-mail:caexyw@163.com
张卓然 男,1978年生,教授,博士生导师,研究方向为航空电气化、高效电机和电源系统。E-mail:apsc-zzr@nuaa.edu.cn(通信作者)
(编辑 郭丽军)