
图1 电动汽车无线充电双LCC补偿电路
Fig.1 Electric vehicle wireless charging double LCC compensation circuit diagram
摘要 针对电动汽车需要分段式恒流充电以及无线充电的输出电流易受自身参数和环境变化影响的问题,应用电路理论分析了双LCC拓扑无线充电系统的动态特性,并通过扩展函数描述法(EDF)建立了描述该系统受扰动时的小信号模型,进而提出了一种基于双LCC补偿拓扑结构下电流-电流环的双闭环控制策略,实现了电动汽车无线充电的自整定控制。最后通过仿真验证了该系统能够有效减小动态响应时间和输出电流纹波系数,并且搭建谐振频率为85kHz电动汽车无线充电实验平台,验证了理论与仿真的正确性。
关键词:双LCC补偿拓扑 小信号模型 双闭环 自整定控制
近年来,国内汽车的电动化、智能化、网联化、共享化已成为当今行业的趋势性共识[1]。随着国内外对于电动汽车的研究和产量的逐步升温,其充电问题逐渐凸显,无线充电技术以其方便、运行可靠性高、适应环境能力强等优点被认为是一种潜在的解决方案[2-3]。《能源技术革命创新行动计划(2016—2030年)》中要求,到2020年,突破电动汽车无线充电技术,以电动汽车无线充电为突破点和应用对象,研发高效率、低成本的无线充电系统[4]。
目前,国内外采用的电动汽车无线充电多为恒流充电,虽然恒流充电可以较为快速地为动力电池补充电能,但是持续的恒流充电会造成电池严重的极化现象进而缩短动力电池的使用寿命[5]。针对以上问题,文献[6]提出了可调自励振荡开关技术,实现电动汽车无线充电的高效率、高能量传输,并利用变相位技术限制电流超调,但当系统参数变化时,系统不能及时响应,从而影响电池寿命,而且控制方法较为复杂。文献[7]基于LCL-LCL补偿拓扑结构,采集原边输出电流与给定电流后传输给控制器,控制器采用 PWM控制策略调节逆变电路开关管的占空比来实现输出电流的控制。但此控制系统采用的是传统PI控制方法,动态响应较慢。文献[7]提出基于双LCC补偿拓扑的电动汽车多阶段恒流无线充电,将动力电池的充电阶段划分为若干个恒流充电阶段,但该方法为了避免出现过充电,将标准电流设置偏小,因此充电时间仍然较长,而且不具备自整定能力,充电过程容易出现过充电现象,对蓄电池寿命不利。文献[8-9]分析了基于LCL-T拓扑无线充电系统的动态特性,并利用广义状态空间平均建模方法建立系统的大信号模型与小信号模型,并设计数字PI控制器。但文献[8]仅考虑一次侧电路,未对二次侧电路进行动态分析。文献[9]虽考虑一次、二次侧完整电路,但是推导方式过于繁琐,而且对于电动汽车无线充电系统,双LCC拓扑结构抗偏移性更强,且具有恒压恒流输出特性。
基于上述问题,本文考虑电动汽车无线充电系统结构拓扑的整体性与实用性。分析了高阶双LCC补偿拓扑的动态特性,并利用扩展函数描述(Extension Description Function, EDF)建模方法建立反映系统扰动的小信号模型,提出了一种基于双LCC补偿拓扑结构下电流环-电流环的双闭环控制策略,进而设计了数字控制器,并通过仿真与实验验证了理论推导的正确性,提高了闭环系统的动态特性,使得输出电流与动力电池最佳充电曲线重合,实现了电动汽车无线充电的自整定控制,进一步推动了电动汽车动力电池的智能化快速充电和均衡充电的发展。
电动汽车无线充电系统如图1所示,该系统主要由高频逆变部分、双LCC谐振耦合部分、整流部分和负载四部分组成。电网能量先经过整流将交流电转换成直流电,再经高频逆变电源转换成高频高压交流电,利用磁感应耦合作用,一、二次线圈发生谐振将能量传递到二次侧,再经一次侧整流桥转换成直流电,最后在经过负载端的滤波电容滤波和稳压后传递到电动汽车电池中。一、二次侧补偿拓扑为双LCC电路,并且为对称结构。图1所示为单相无线充电系统,其中Rl表示为电动汽车动力电池的等效电阻,Cdc2为滤波电容。
图1 电动汽车无线充电双LCC补偿电路
Fig.1 Electric vehicle wireless charging double LCC compensation circuit diagram
图2为一次侧等效电路,其中Q1~ Q4为组成全桥逆变器的四个MOSFET管,C1、Cf1为一次补偿电容,Lf1、Lp为一次电感,U1为逆变输出之前的电压,UAB为逆变输出电压,Zs为二次侧折算到一次侧的等效阻抗, Zin为双LCC补偿拓扑系统输入的总阻抗。
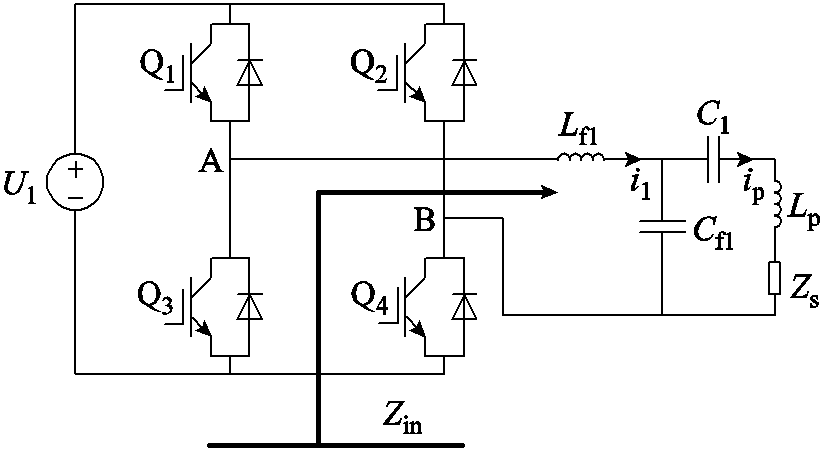
图2 一次侧等效电路
Fig.2 Original side equivalent circuit diagram
对于双LCC系统,不同的谐振条件会产生不同输出特性,本文令系统运行的谐振条件[10]为
 (1)
(1)当系统运行在谐振频率时,系统的输入总阻抗的虚部为0,此时LCC的输入阻抗Zin为纯阻性[11],则LCC电路的输入阻抗与输入电流为
 (2)
(2)根据基尔霍夫电压和电流定律,利用式(2)求得系统总输入电流,然后减去电感电流,可得系统一次侧谐振电流为
 (3)
(3)由式(3)可知,当LCC电路处于谐振频率点时满足恒流特性,输入电流仅与逆变电压与补偿电感有关,不受负载变化的影响。
图3所示为负载变化时不同补偿结构的逆变电流变化,负载端电阻以2W为步长从17W 变化到31W。
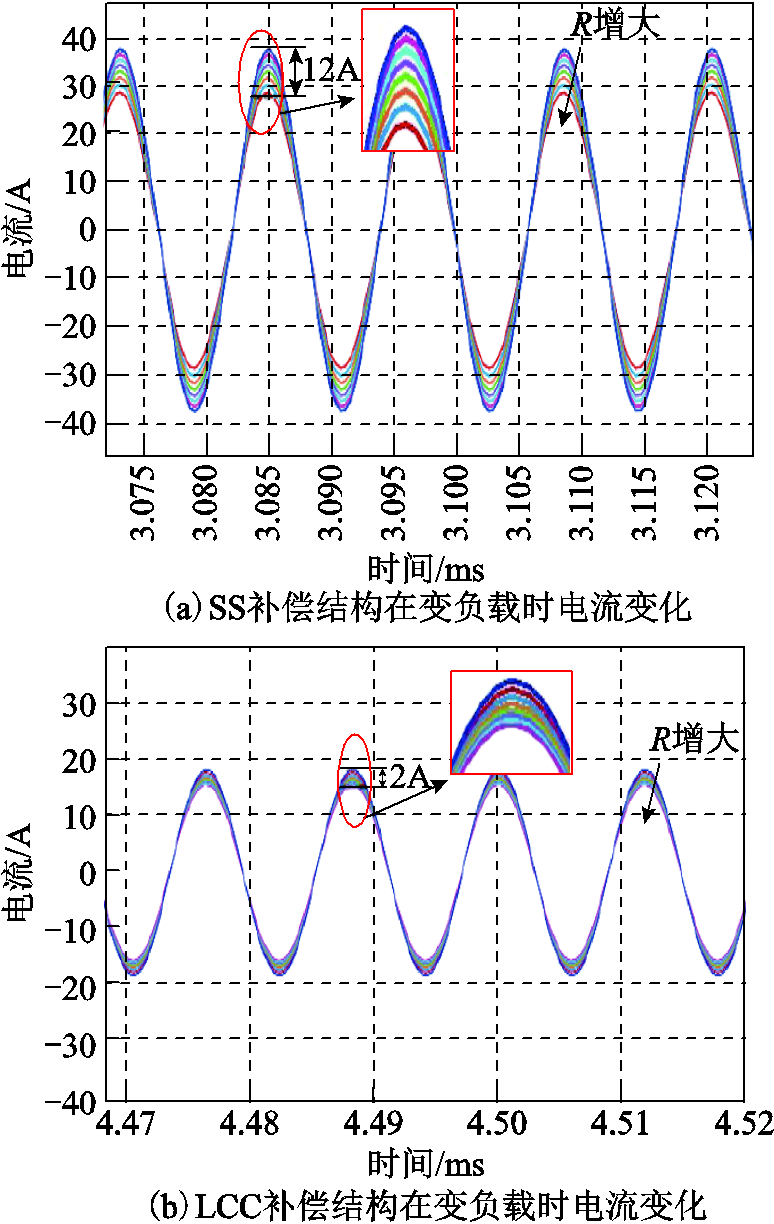
图3 负载变化时不同补偿结构的电流变化
Fig.3 Current changes of different compensation structures when load changes
由图3中可以看到,SS补偿电路的峰值电流相差12A,LCC补偿电路的电流峰值相差2A,可见负载端变化对双LCC补偿拓扑结构电路影响较小,从而证明理论推导的正确性。
根据双LCC拓扑结构可得出系统谐振电路的等效模型。对于该等效模型,可将其分为一次侧等效模型,二次侧整流前等效模型与二次侧整流后等效模型三部分[12],如图4所示。
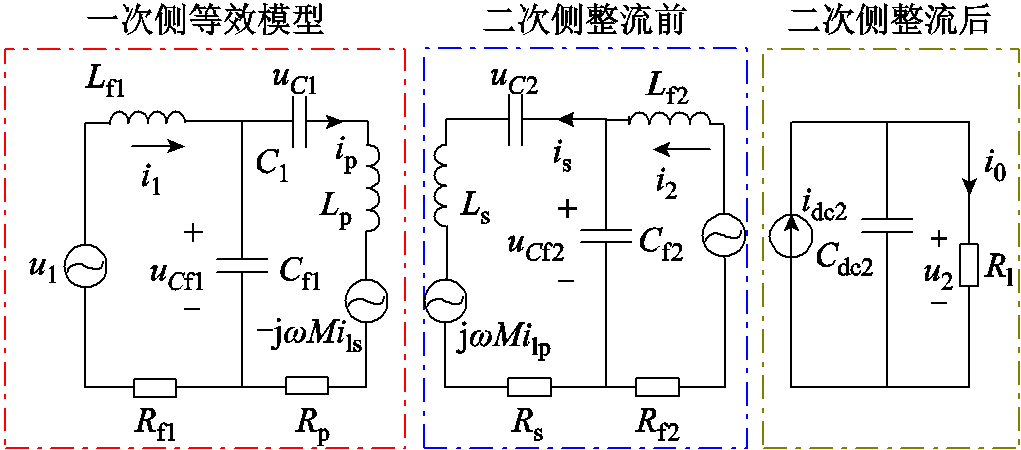
图4 基于双LCC拓扑谐振电路等效模型
Fig.4 Based on double LCC topology resonance circuit equivalent model
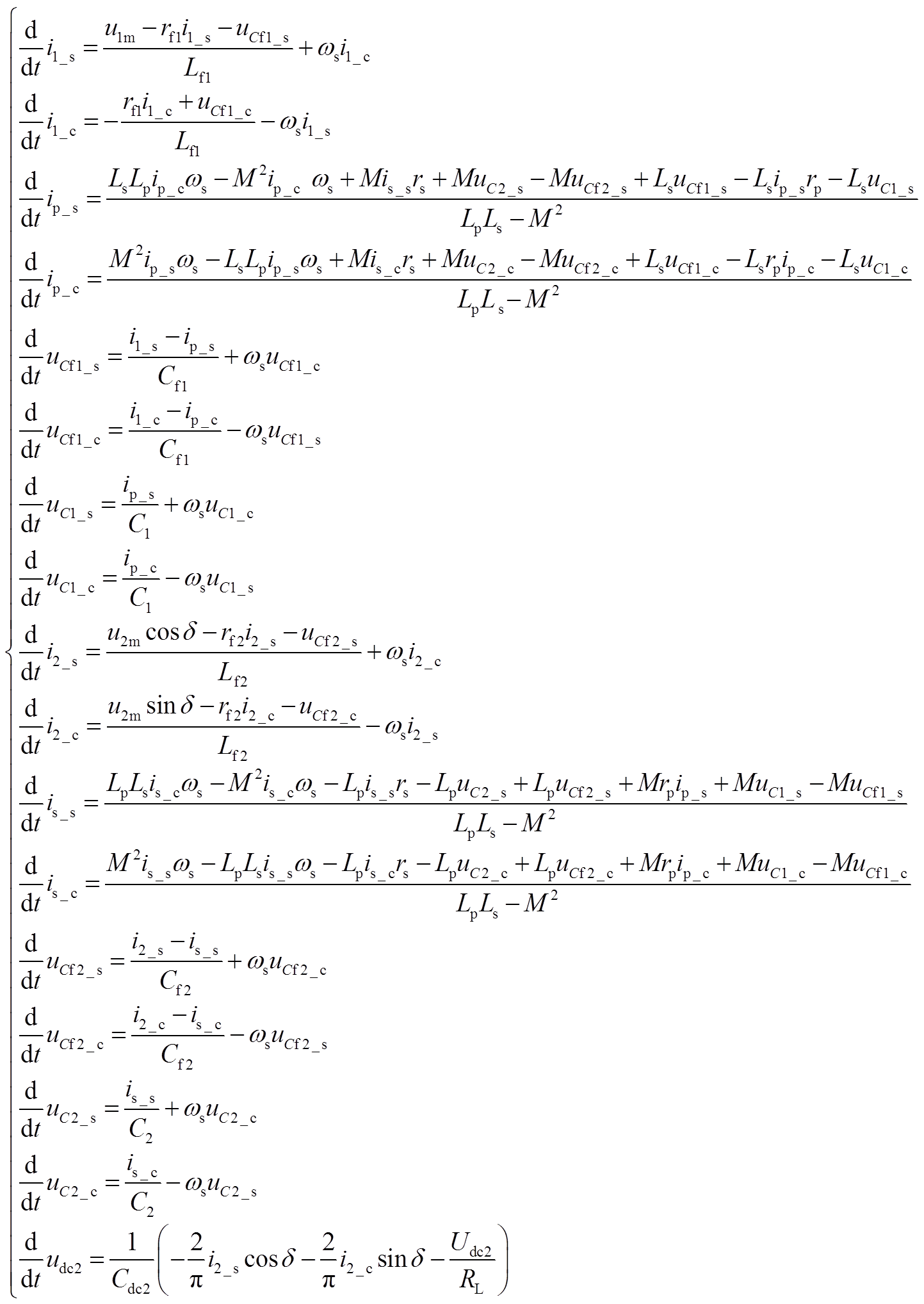
图4中u1为逆变输出的电压,u2为整流输出之前的电压,i1为逆变输出电流,idc2为二次侧整流后的电流,i0为负载端输出电流,选取电感电流,Cdc2为负载端滤波电容,电容电压作为状态量,并根据此建立该系统的微分方程[13]为
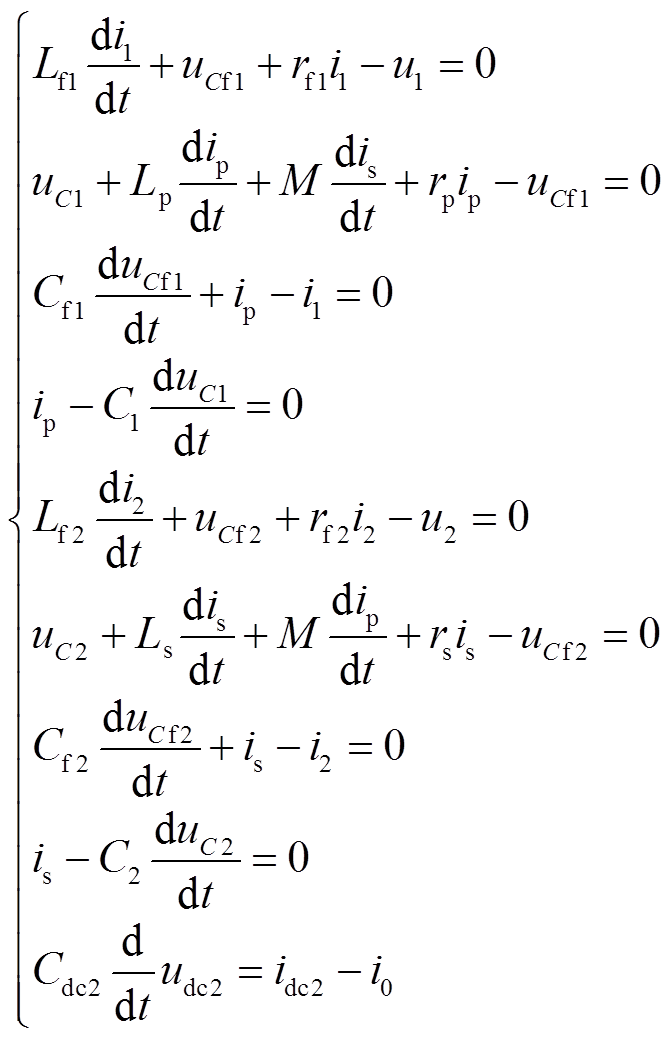 (4)
(4)将电路交流侧的电压、电流量写成正弦分量和余弦分量之和的形式,其中,Xi表示电压电流量,X_s为正弦分量的幅值,X_c为余弦分量的幅值。
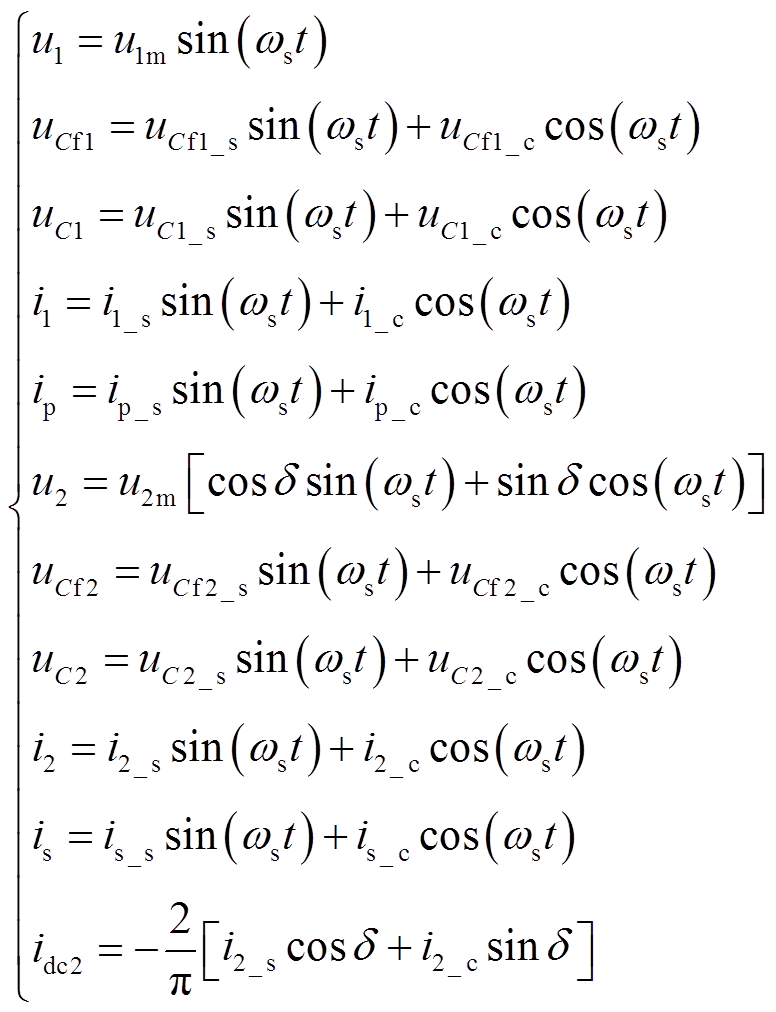 (5)
(5) =-90o,将u1和u2的基波分量用u1m和u2m表示为
=-90o,将u1和u2的基波分量用u1m和u2m表示为
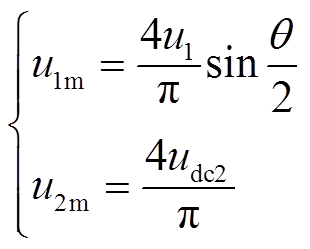 (6)
(6)将式(5)代入到微分方程中,其中对于每一个状态变量的微分都利用式(7)得出。
 (7)
(7)对于每一个代入后的式子,令正弦项的系数和余弦项的系数均为零,构成一组新的方程组,解此方程组,可得系统的状态方程(即该系统的大信号模型)。其中大信号模型由附录式(A1)给出,通过将大信号模型中的所有导数设为0,即可计算出所有变量的稳态解。由于稳态解的复杂性,这里不给出稳态解。
使得状态向量和控制输入分别为 和
和 ,其表达式由式(A2)给出。同时取输出量为二次侧直流侧电容电压,可得系统的状态空间形式的小信号模型为
,其表达式由式(A2)给出。同时取输出量为二次侧直流侧电容电压,可得系统的状态空间形式的小信号模型为
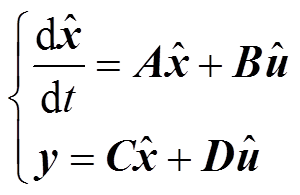 (8)
(8)式中,A、B、C、D的表达式见式(A3)~ 式(A6)。为了保证推导出的小信号模型具有正确的稳态增益,模型的输出应该是扰动Udc2的峰值幅值。
为验证所推导小信号模型的正确性,利用仿真软件进行仿真,对于每个状态变量进行验证,如图5所示,因为双LCC为高阶电路,包括8个电容和电感,所以在这里只选取了一次电感以及二次电容的验证波形,图5中包络线为大信号模型,振荡波形为仿真实际值。可看到大信号模型能较好地表示实际值,因为小信号模型由大信号模型加入扰动项求得,故大信号模型的理想性可在一定程度上反映小信号模型的正确性。
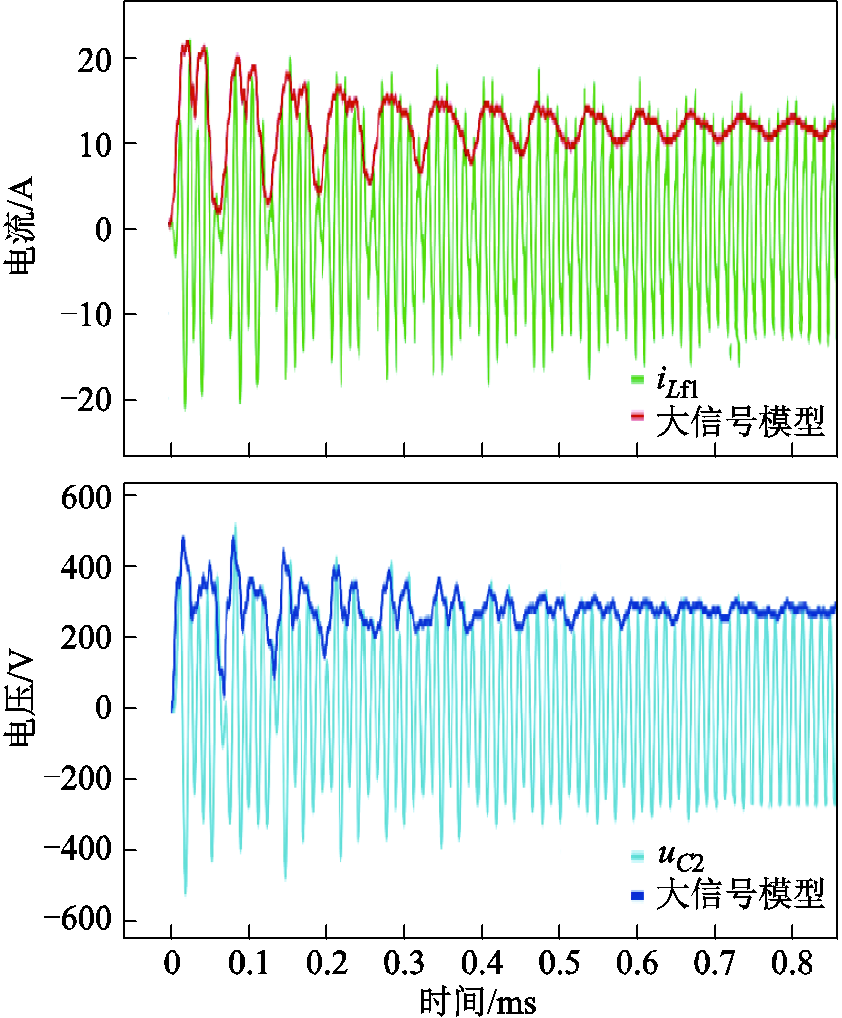
图5 模型验证
Fig.5 model verification diagram
在无线充电系统中,当各个物理量发生细小的扰动[14]时,可以将该系统用线性模型表示出来,也就是上文推导的小信号模型,小信号模型可以很好地表示出系统的的动态特性,在下文中将利用该模型设计闭环系统的控制。
为了实现电动汽车无线充电的自整定控制,需要在系统中加入两个电流环,分别为输出电流环和逆变输出电流环。
完整的无线充电双闭环系统如图6所示。该系统利用负载端采集模块,采集负载端输出电流及电池管理系统(Battery Management System, BMS)充电曲线,通过无线模块将数据及曲线发送到接收端[15]。然后接收端将采集的数据发送到控制系统中,通过控制逆变输出来控制电压电流的变化,从而达到整个系统自整定控制的目的。
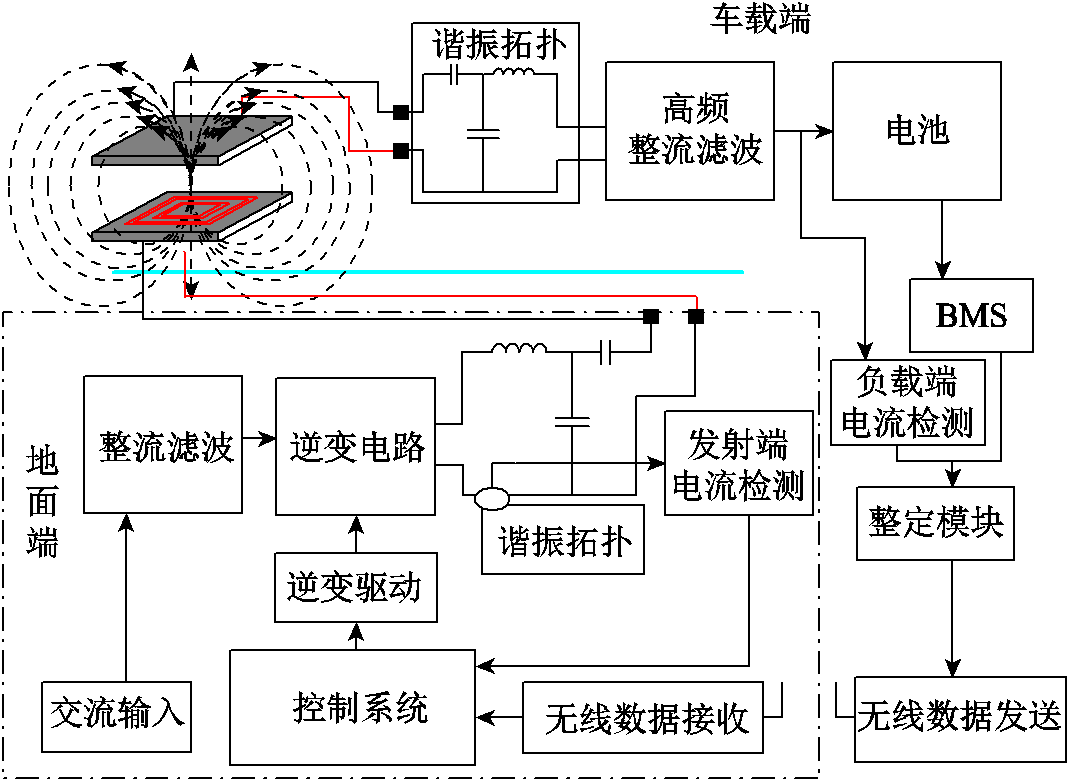
图6 电动汽车无线充电系统
Fig.6 Electric vehicle wireless charging system diagram
图7所示为电流环闭环系统的具有理想反馈路径和零计算延迟的Z域理论控制模型。该控制回路理论上在系统变化时产生最快的动态响应[16],其中传递函数G(s)包括双LCC拓扑的小信号和系统延迟项。将传递函数G(s)导入到Matlab的SISO中,使其自动生成合适的控制系统增益[17],然后根据实际系统进行微调就可作为电流闭环的控制系统。
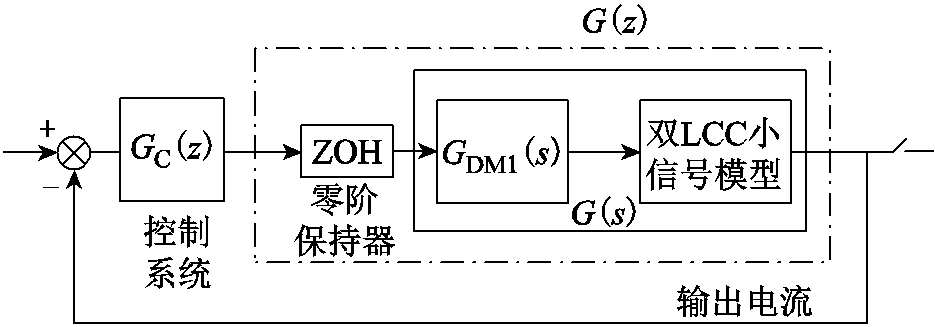
图7 Z域理论闭环控制控制模型
Fig.7 Z-domain theoretical closed - loop control model
如图8所示,为系统零时刻启动时逆变电流。可以看到启动电流瞬时可达到稳态电流的180%,这种高电流很容易使器件损坏[18],故加入第二个电流环。通过检测逆变输出电流与负载端给定电流相比较,再利用PI控制算法,该逆变电流环的连续时间内PI的具体参数为Kp=3.645 7,Ki=73 675.5,将启动电流变小,使得系统启动时逆变电流根据负载端的给定值逐渐达到稳定,从而起到了保护电源器件的作用。
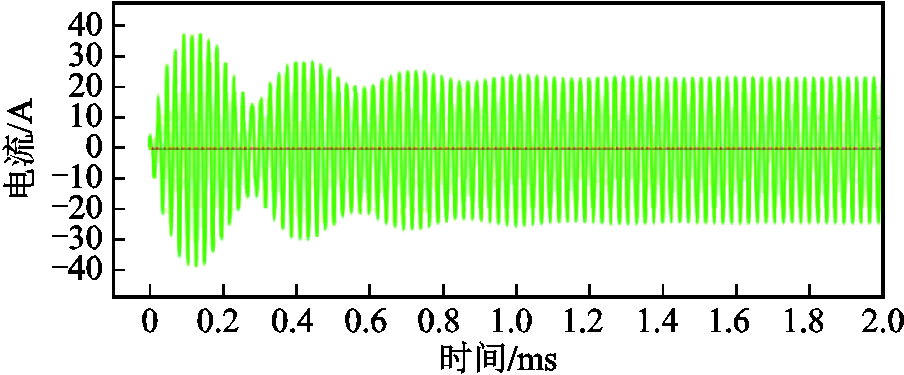
图8 系统零时刻启动时逆变电流
Fig.8 Inverter current when system starts at zero time
逆变电流环与输出电流环共同组成自整定控制系统,如图9所示,为移相式PWM波示意图。S1(t)~ S4(t)为逆变器的4个导通信号,其中,S1(t)和S4(t)为H桥的一个桥臂,S2(t)和S3(t)为H桥的第二个桥臂。θ表示导通信号S1(t)和S4(t)相位差,为系统控制的PWM移相角。
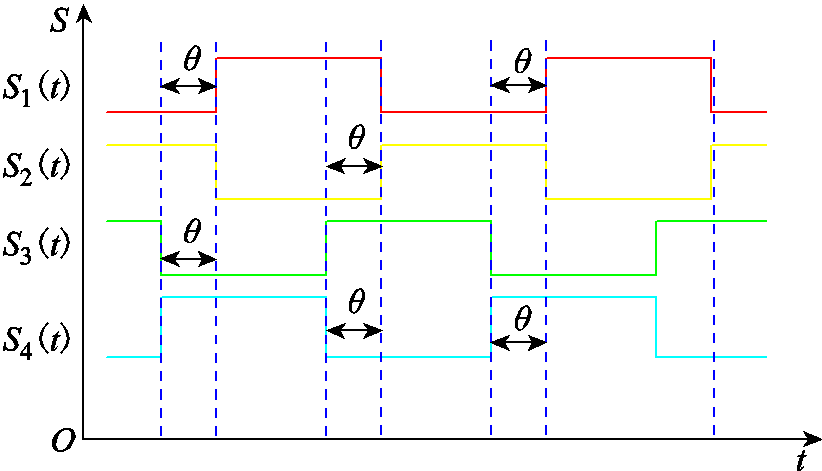
图9 移相式PWM波示意图
Fig.9 Phase shift PWM wave diagram
在电动汽车无线充电过程中,将电池端发出的BMS给定的值通过无线模块传输到控制系统中,同时测得一次侧线圈上的电流传输到控制系统,经过系统内部运算比较,并根据式(9)来控制逆变器输出[9],从而达到电动汽车电池快速均衡无线充电的目的[19]。
 (9)
(9)式中,Ugiv为负载端BMS给定值。
通过本文所设计的控制器的运算,使系统快速反应,既实现了输出电流达到充电需求又达到了保护系统器件的目的。
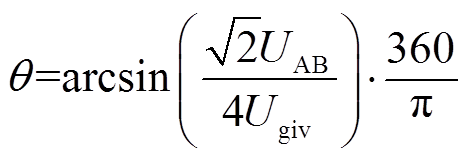
根据式(1)给出的双LCC补偿电路的谐振条件,并结合国内外电动汽车无线充电的要求,在理论的基础上设计的该系统谐振补偿的具体参数见表1。根据图6,利用表1中的具体参数,建立了该系统的仿真模型,如图10所示。
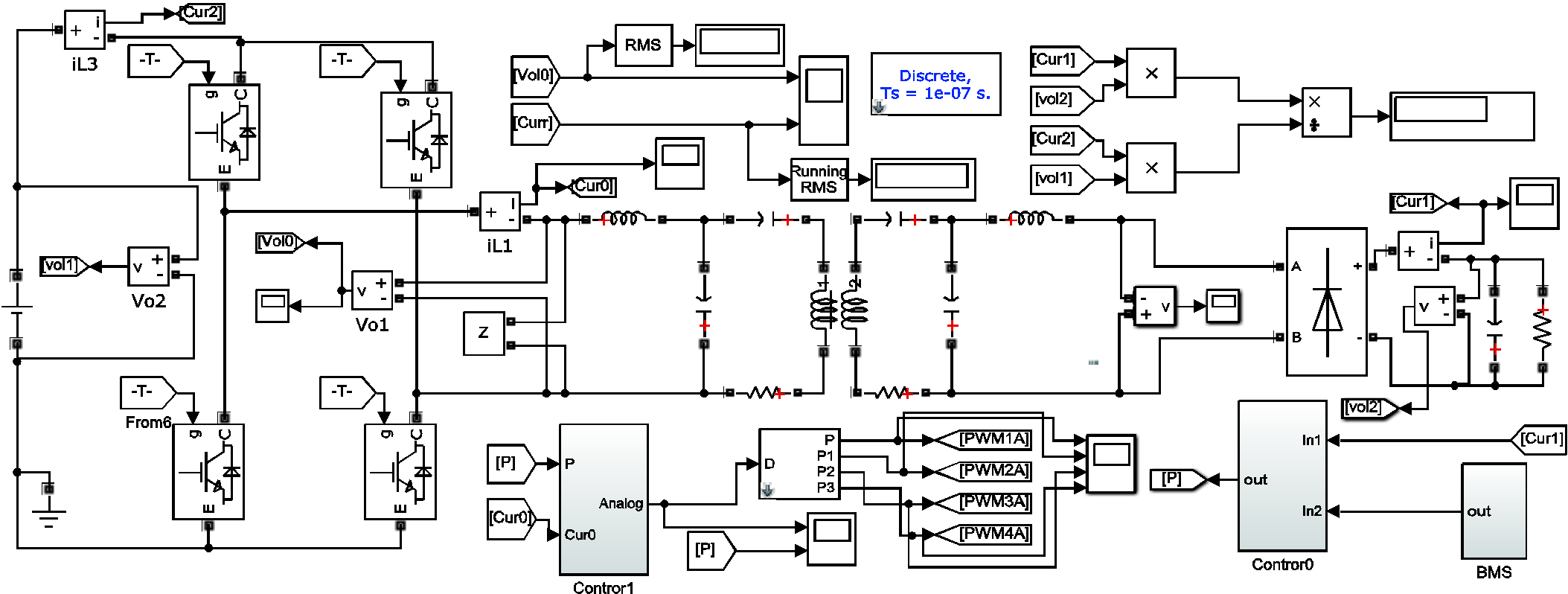
图10 基于双LCC无线电能传输电流-电流环双闭环系统仿真图
Fig.10 Simulation diagram of double closed loop system based on double LCC radio energy transmission Current-current loop
表1 实验系统主要参数
Tab.1 Main parameters of the experimentalsystem

参数数值参数数值 输入电压/V532Lf1/mH58.0 频率/kHz85Cf1/nF 60.4 互感/mH11.6LP/mH58.0 耦合系数0.1C1/nF 60.4 滤波电容/mF133LS/mH58.0 负载电阻/W25C2/nF 60.4 Lf2/mH58Cf2/nF 60.4
利用搭建的仿真模型,当系统工作在85kHz时,得到原边逆变控制输出的电压和电流波形如图11所示。此时为负载需求电流变化时,系统的调节变化,可以看到电压波形为移相式的方波,而电流的波形近似于正弦波。
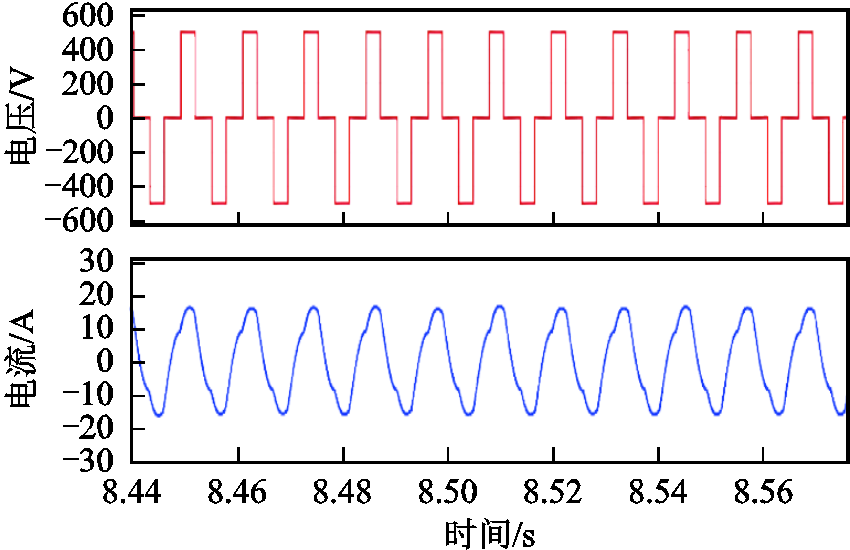
图11 逆变输出电压与电流波形
Fig.11 Inverter output voltage and current waveform
图12为利用小信号模型得出的鲁棒控制器系统和传统的控制系统的负载输出电流仿真波形。在仿真时加入了step-breaker阶跃开关,在0.01s时,使得负载需求电流由10A突变到15A。从图12中可以看到,本文所设计的自整定系统在t=2ms时电流达到稳定值,而普通系统则在t=5ms时达到稳定,自整定系统比普通系统达到稳定值要快3ms,其中超调量可忽略不计,充分证明了本文理论推导的正确性。
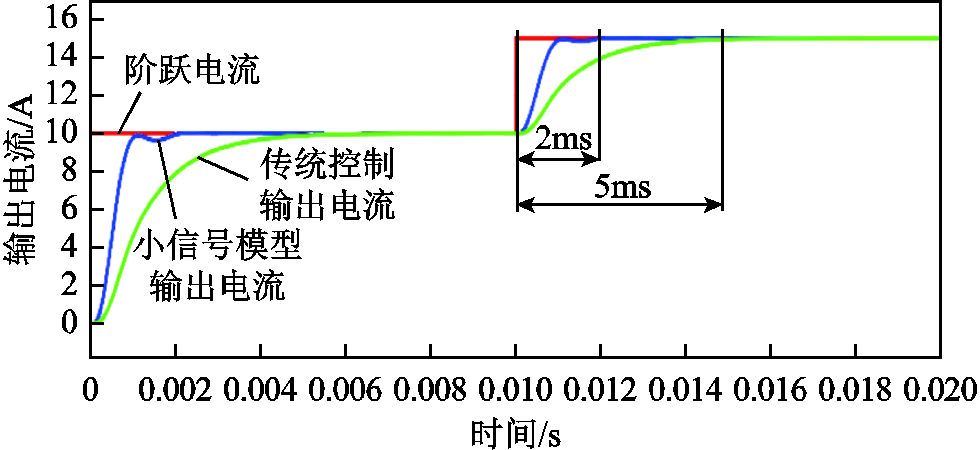
图12 系统负载输出电流波形比较
Fig.12 System load output current waveform comparison
为进一步验证针对双LCC拓扑理论分析及仿真搭建模型的准确性,本文搭建了1.5kW无线电能传输系统,实验平台如图13所示,系统参数与表1相同。

图13 电动汽车无线充电实验平台
Fig.13 Experimental platform for wireless charging of electric vehicles
本实验装置中采用的谐振频率为85kHz,图13中线圈均采用漆包利兹线绕制,接收线圈采用集磁环结构,线圈距离稳定在8cm左右,电池采用具有可调节需求电流功能的蓄电池。实验在保证谐振频率不变的情况下,对逆变输出电流与负载端输出电流进行测试。
图14为逆变输出稳态情况下的电压与电流,此时系统处于谐振状态,可看到电压与电流同相位,并略呈弱感性。同时该逆变电流近似为正弦波,可证明该系统利用双LCC补偿网络对于高次谐波的抑制较强。
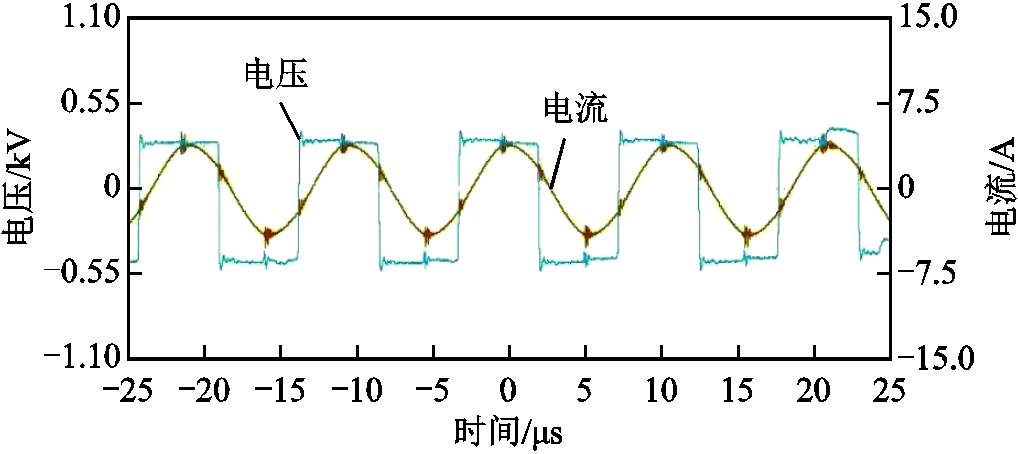
图14 逆变输出电压与电流波形
Fig.14 Inverter output voltage and current waveforms
自整定系统可有效抑制负载输出电流的波动,如图15所示。截取系统在稳态时负载端输出电流,比较普通系统和自整定系统的负载输出电流曲线。可看到图15a中的电流波动特别大,波纹系数可达到15%左右,而图15b中输出电流的波纹系数最小可以达到3%左右。
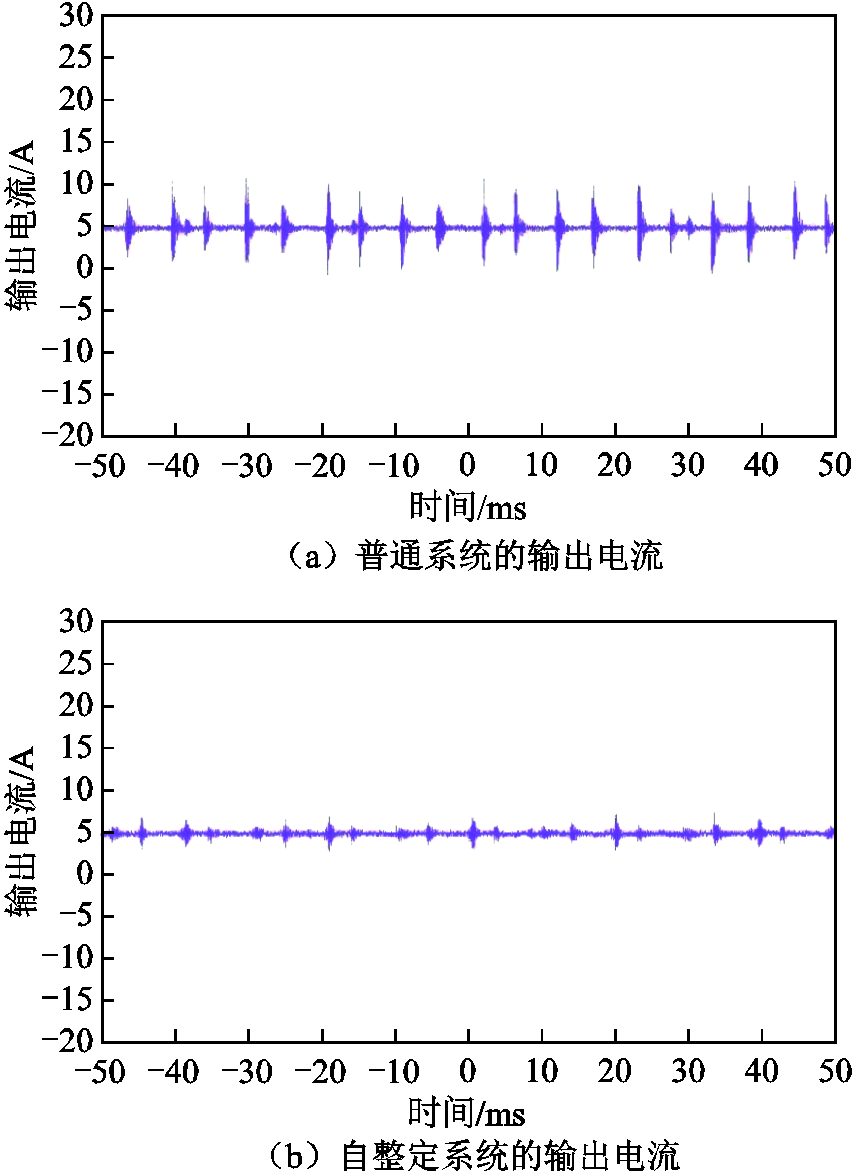
图15 不同系统的负载输出电流比较
Fig.15 Load output current comparison of different systems
图16为系统在零时刻启动时的输入电流,在电流环的作用下输入电流突变较小,然后逐渐上升,达到负载端需求的电流的大小,并稳定输出。证明了逆变电流环理论与仿真的正确性,可起到有效保护电源器件的作用。
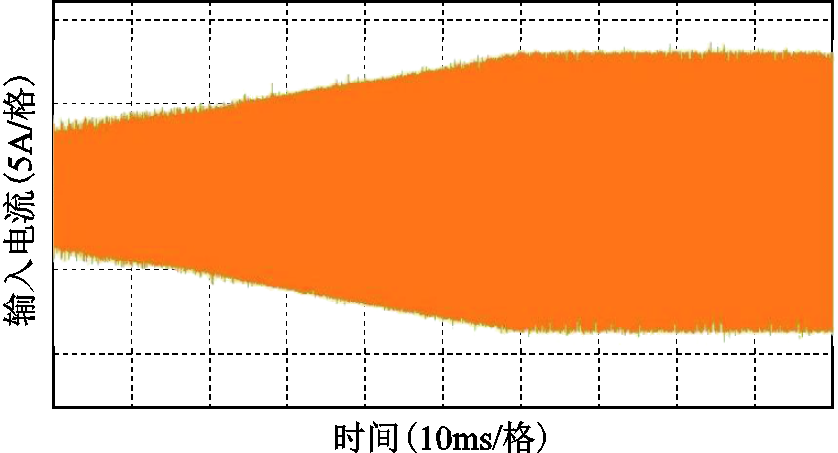
图16 系统零时刻启动时输入电流
Fig.16 Input current when system starts at zero time
在实验平台的测试中,系统的传输效率为89%,由于本文研究的是双LCC补偿结构的无线充电系统的自整定控制,所以效率可以暂不考虑。现对负载端BMS曲线变化时的系统平台进行实验。图17所示为在蓄电池发出所需电流信号时的负载端输出电流与逆变输出电流的变化波形。当系统工作达到稳定之后,输出电流为5A,在t=20ms时,负载需求电流变为15A,由图17a可以看出,负载输出电流经过22ms后达到15A,并且稳定输出,逆变电流也快速反应,逐渐增大。在这里需要指出的是,由于计算和反馈延迟是实验系统固有的特性,以及实验平台中使用的无线通信模块作为数据传输工具,理论控制器的设计无法在实验中实现模拟响应,故理论仿真与实验会有一定偏差。因此,如图12与图17所示,本文所提出的控制方法与现有的传统控制方法相比,若忽略所有系统共有的无线模块传输时间,本系统较传统控制系统的动态响应时间提升了60%,验证了理论推导的正确性。
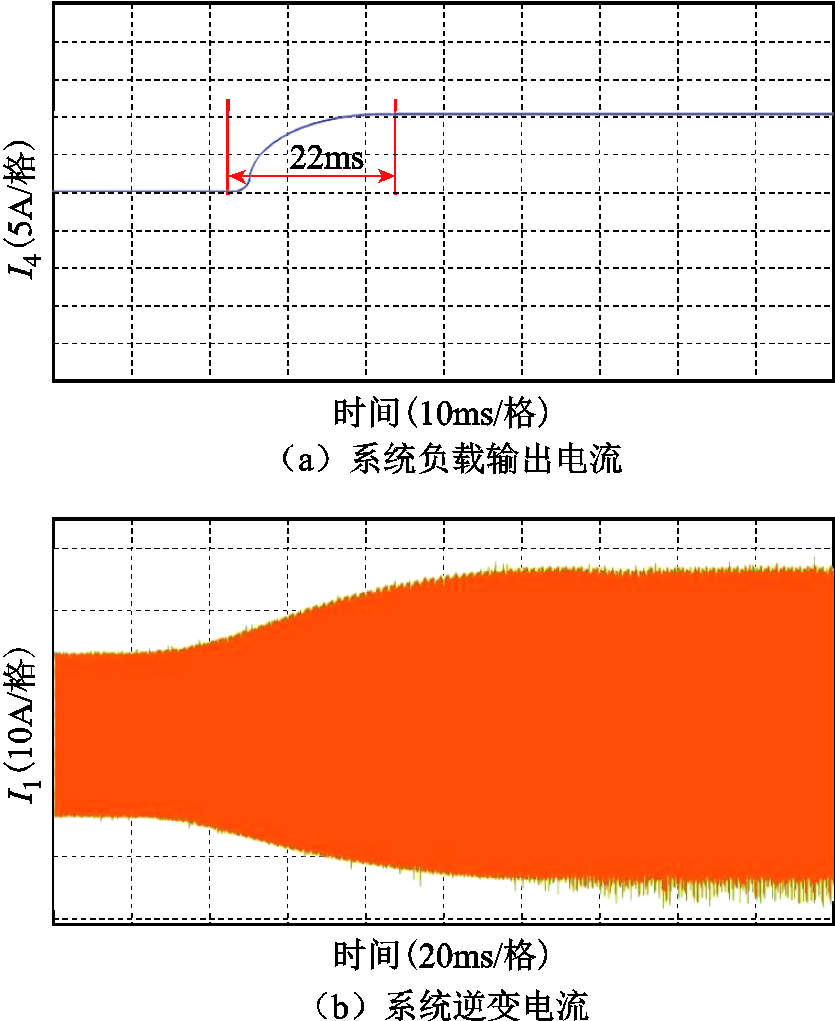
图17 负载需求电流变化时系统逆变和负载输出电流的变化
Fig.17 When the load demand current changes, the system inverter and load output current change
通过实验及仿真,验证了该系统可以快速稳定地达到电池需求,且波纹系数较普通系统变化较小,符合理论分析和仿真结果,可见所设计的闭环控制系统性能良好。
本文针对电动汽车需要分段式恒流充电以及无线电能传输的输出电流易受自身参数和环境变化影响的问题,通过分析双LCC拓扑结构的动态特性以及推导反应无线充电系统的扰动小信号模型,提出了一种基于双LCC补偿拓扑下电流-电流环的双闭环控制系统,实现了电动汽车无线充电的快速自整定控制。最后搭建了功率等级为1.5kW的无线充电实验平台,该系统提高了系统的动态响应能力,响应时间为22ms,提升了60%,且超调量可忽略不计;有效地减小了输出电流的波纹系数,波纹系数减小到3%,提升了12%。验证了该系统的可行性,为动态无线充电系统优化提供理论依据。
 (A1)
(A1)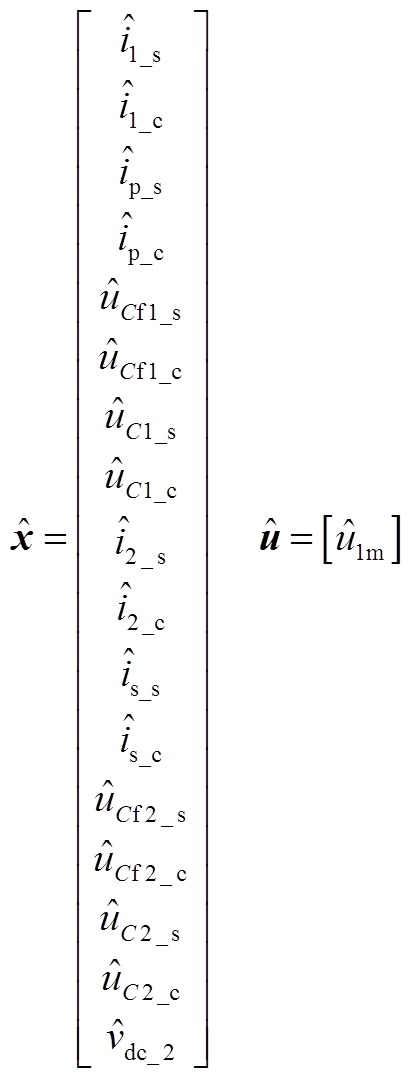 (A2)
(A2)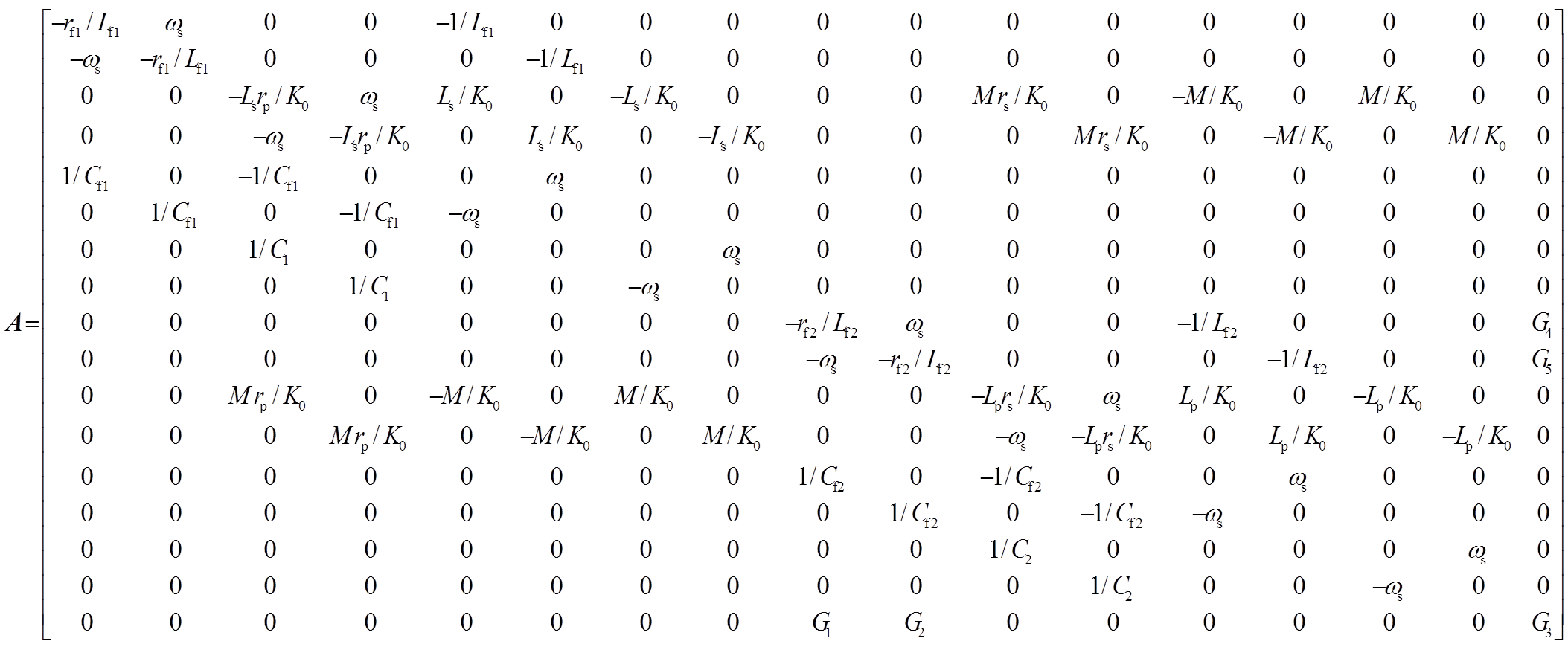
 (A3)
(A3) (A4)
(A4) (A5)
(A5) (A6)
(A6)参考文献
[1] 杨庆新, 章鹏程, 祝丽花, 等. 无线电能传输技术的关键基础与技术瓶颈问题[J]. 电工技术学报, 2015, 30(5): 1-8.Yang Qingxin, Zhang Pengcheng, Zhu Lihua, et al. Key basic and technical bottlenecks of wireless energy transmission technology[J]. Transactions of China Electrotechnical Society, 2015, 30(5): 1-8.
[2] Philip M, Li Quan. A critical review on wireless charging for electric vehicles[J]. Renewable and Sustainable Energy Reviews, 2019, 104: 209-234.
[3] Hutchinson L, Waterson B, Anvari B, et al. Potential of wireless power transfer for dynamic charging of electric vehicles[J]. IET Intelligent Transport Systems, 2019, 13(1): 3-12.
[4] 卢伟国, 陈伟铭, 李慧荣. 多负载多线圈无线电能传输系统各路输出的恒压特性设计[J]. 电工技术学报, 2019, 34(6): 1137-1147.Lu Weiguo, Chen Weiming, Li Huirong. Multi-load constant voltage design for multi-load and multi-coil wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1137-1147.
[5] 朱国平, 匡洪海, 张瀚超, 等. 基于双LCC的电动汽车多阶段恒流无线充电技术[J]. 电子产品世界, 2018, 25(4): 41-44.Zhu Guoping, Kuang Honghai, Zhang Hanchao, et al. Multi stage constant current wireless charging technology for electric vehicle based on dual LCC[J]. Electronic Computer Design World, 2018, 25(4): 41-44.
[6] Moosavi A, Mortazavi S, Namadmalan A. Analysis of dynamic wireless charging using tunable self-oscillating method[J]. International Journal of Electronics, 2019, 106(11): 1746-1768.
[7] Hua Jie, Wang He, Zhao Yao, et al. LCL resonant compensation of movable ICPT systems with a multi-load[J]. Journal of Power Electronics, 2015, 15(6): 1654-1663.
[8] Hao Hao, Covic G, Boys J. An approximate dynamic model of LCL- -based inductive power transfer power supplies[J]. IEEE Transactions on Power Electronics, 2014, 29(10): 5554-5567.
[9] 林天仁, 李勇, 麦瑞坤. 基于LCL-S拓扑的感应电能传输系统的建模与控制方法[J]. 电工技术学报, 2018, 33(1): 104-111.Lin Tianren, Li Yong, Mai Ruikun. Modeling and control method of inductive power transfer system based on LCL-S topology[J]. Transactions of China Electrotechnical Society, 2018, 33(1): 104-111.
[10] 张成良. 基于双边LCC拓扑结构的抗偏移静态无线充电系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
[11] Zhu Guorong, Lin Peng, Lu Jianghua, et al. Research on double LCC compensation circuit in inductive power transfer system[J]. Journal of Huazhong University of Science & Technology, 2017, 45(5): 104-109.
[12] Zhu Qingwei, Wang Lifang, Guo Yanjie, et al. Applying LCC compensation network to dynamic wireless EV charging system[J]. IEEE Transactions on Industrial Electronics, 2016, 63(10): 6557-6567.
[13] 苏杭. 非对称耦合高频电源自适应跟踪算法研究[D].天津: 天津工业大学, 2017.
[14] Feng Ji, Xie Ming, Tang Chao. Optimization analysis and design of LCC resonant circuit parameters[J]. Electronic Measurement Technology, 2018, 41(20): 23-27.
[15] 苏玉刚, 吴学颖, 赵鱼名, 等. 互补对称式LCC谐振网络的电场耦合式无线电能传输系统参数优化[J]. 电工技术学报, 2019, 34(14): 2874-2883.Su Yugang, Wu Xueying, Zhao Yuming, et al. Parameter optimization of electric-field coupled wireless power transfer system with complementary symmetric LCC resonant network[J]. Transactions of China Electrotechnical Society, 2019, 34(14): 2874-2883.
[16] 麦瑞坤, 林天仁, 李勇, 等. 双发射线圈感应电能传输系统的小信号建模及控制研究[J]. 中国电机工程学报, 2017, 37(20): 6068-6076.Mai Ruikun, Lin Tianren, Li Yong, et al. Study on small signal modeling and controlling for dual transmitters based inductive power transfer system[J]. Proceedings of the CSEE, 2017, 37(20): 6068-6076.
[17] Deng Qijun, Wang Ziyi, Chen Cheng, et al. Modeling and control of inductive power transfer system supplied by multiphase phase-controlled inverter[J]. IEEE Transactions on Power Electronics, 2019, 34(9): 9303-9315.
[18] 耿宇宇, 杨中平, 林飞, 等. 用于混合储能系统供电的无线电能传输技术效率优化策略研究[J]. 电工技术学报, 2019, 34(增刊1): 424-432.Geng Yuyu, Yang Zhongping, Lin Fei, et al. Efficiency optimization strategy for wireless power transfer used in hybrid energy storage system[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 424-432.
[19] 诸嘉慧, 刘之方, 高强, 等. 基于能量流理论的谐振式无线电能传输原理分析与验证[J]. 电工技术学报, 2019, 34(20): 4188-4195.Zhu Jiahui, Liu Zhifang, Gao Qiang, et al. Analysis and verification of energy flow model of magnetic resonant coupled wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2019, 34(20): 4188-4195.
Research on Self-Tuning Control Strategy of Wireless Charging for Electric Vehicles
Abstract Aiming at the problem that electric vehicles need sectional constant current charging and the output current of wireless charging is susceptible to the influence of their own parameters and environmental changes, Application of circuit theory to analyze the dynamic characteristics of a dual LCC topology wireless charging system. A small signal model describing the disturbance of the system is established by EDF modeling method. A double closed-loop current-current loop system based on double LCC compensation topology is proposed to realize the self-tuning control of electric vehicle wireless charging. Finally, the simulation results show that the system can effectively reduce the dynamic response time and output current ripple coefficient. The experimental platform of wireless charging with resonant frequency of 85kHz is built to verify the correctness of the theory and simulation.
keywords:Double LCC compensation topology, small signal model, double closed loop, self-tuning control
中图分类号:TM12
DOI:DOI:10.19595/j.cnki.1000-6753.tces.191601
国家自然科学基金(51677132,51977147)和国家重点研发计划(2018YFB0106303)资助。
收稿日期2019-11-22
改稿日期 2019-12-24
张 献 男,1983年生,教授,硕士生导师,研究方向为无线电能传输技术,工程电磁场与磁技术,现代工程电磁场数值分析。E-mail:zhangxian@tjpu.edu.cn
任年振 男,1995年生,硕士研究生,研究方向为无线电能传输技术。E-mail:happyrnz@163.com(通信作者)
(编辑 赫蕾)