 )、DQ、fg坐标系,分别用上标s、r、
)、DQ、fg坐标系,分别用上标s、r、 、a、u表示。其中,DQ坐标系为电感各向异性坐标系,
、a、u表示。其中,DQ坐标系为电感各向异性坐标系, 为D轴与a 轴之间夹角。此外,本文引入注入电压坐标系fg,它和坐标系之间的夹角定义为注入角,用
为D轴与a 轴之间夹角。此外,本文引入注入电压坐标系fg,它和坐标系之间的夹角定义为注入角,用 表示。
表示。摘要 针对常规估计d轴方波电压注入位置估计方法,受磁场交叉饱和效应影响而导致转子位置估计误差的问题,提出一种考虑磁场交叉饱和效应补偿的变角度方波电压注入永磁同步电机(PMSM)无位置传感器控制策略。该方法首先定义注入电压同步旋转坐标系fg,并在f轴上注入方波电压。f轴与估计d轴之间夹角即为注入角,且该注入角随着磁场交叉饱和效应不同而实时改变。再计算g轴差分电流并用于位置估计,由于方波电压注入角的改变,g轴差分电流中将不再包含交叉饱和效应相关信息,从而可实现准确的位置估计。最后将该文所提变角度方波注入方法与常规估计d轴方波电压注入方法进行实验对比,实验结果表明,所提方法在不同负载转矩、不同转速等工况下,位置估计误差始终维持在零附近,动态响应快,且方便实现。
关键词:永磁同步电机 方波电压注入 磁场交叉饱和效应 无位置传感器控制
永磁同步电机(Permanent Magnet Synchronous Machine, PMSM)凭借其高功率密度、高效率、快速动态性能等优点而得到广泛应用。然而,利用位置传感器来检测转子磁极位置的控制方式给电机系统带来许多问题,如成本增加、可靠性降低、适应场合受限等。近20年来,永磁同步电动机无位置传感器控制技术引起了工业界广泛的关注,成为电机控制领域的研究热点[1]。
通常,按位置估计原理不同可以将无位置传感器控制分为两大类:①基于反电动势基波估计方法[2-5];②基于电感凸极模型的高频信号注入方法[6]。其中,基于电感凸极模型的高频信号注入方法利用dq轴电感不一致性,可在低速范围和静止工况下得到准确的位置估计,因此适用于低速场合。但是,受电机磁场交叉饱和效应、滤波器相位失配、转矩脉动等因素影响,高频信号注入方法在动态性能和静态精度等方面还待改善提高[7]。
由于dq轴磁链存在共磁路部分,即d轴电流变化也会导致q轴磁链变化,反之亦然。这种现象存在于所有交流电机中,称为磁场交叉饱和效应,可用dq轴互感表示[8]。在采用高频信号注入的无位置传感器控制中,交叉饱和效应会引起位置估计误差,并且该误差随着负载的增加而增大[9],严重影响系统的稳定性和运行效率[10-12]。因此,对交叉饱和效应进行补偿,提高位置估计精度具有重要研究意义。然而,针对不同坐标系实现的高频信号注入方法,其交叉饱和效应补偿方法也不相同。
根据高频信号注入坐标系不同,可分为静止坐标系和同步旋转坐标系方法两大类。静止坐标系上高频信号注入方法,信号注入和位置解调都在静止坐标系,其补偿方式相对容易。文献[13]提出ab坐标系上高频方波注入及位置解调策略,通过将交叉饱和效应导致的位置估计误差表示成关于q轴电流的线性函数,并直接补偿至估计位置处。文献[14]针对ab坐标系下高频正弦电压注入位置估计方法,通过在线辨识交叉饱和动态电感,实时计算不同工作点的位置估计误差,并直接补偿至估计位置处。上述两种位置估计方法都需要使用带通和低通滤波器(Low Pass Filter, LPF)提取位置信号,降低了系统动态性能。文献[15]提出一种ab 坐标系上方波电压注入位置估计方法,该策略无需使用滤波器,仅对电流进行少量加减法即可获得位置信息,实施简单、动态响应快,但是并未考虑交叉饱和效应影响,加载工况下出现明显的位置估计误差。
相比静止坐标系上高频信号注入方法,在同步旋转坐标系上实现的高频信号注入方法在削弱转矩脉动方面更有优势[7],但是其交叉饱和效应补偿却不容易实现。文献[16]针对常规脉振高频正弦电压注入法,分析了反电动势项与交叉耦合项对位置估计的影响,但该方法没有考虑磁场交叉饱和效应。针对常规估计d轴中方波电压注入方法,文献[7, 17]通过在估计q轴计算差分电流中加入直流补偿分量,以消除交叉饱和效应产生的位置估计误差,但是,计算该直流补偿分量需要使用精确的dq轴自感和互感参数。文献[18]综合考虑交叉饱和效应和母线电流纹波,提出了一种基于任意同步旋转坐标系的方波注入方法。然而,该方法同样需要精确的自感和互感参数来计算该直流补偿分量。文献[19]在估计d高频方波注入方法中,通过在常规估计q轴差分电流中引入交叉耦合系数和d轴差分电流,消除了交叉饱和导致的位置估计误差。但是,交叉耦合系数需要通过一系列离线实验计算获得。综上所述,对于同步旋转坐标系上高频信号注入方法的交叉饱和效应补偿,往往需要获得不同dq轴电流下的自感和互感参数,在线计算或查表得到补偿分量。然而,电感的测量以及查找表的制作一般通过有限元分析或离线实验测量等方法获得。但是,有限元分析需要知道电机的材质和尺寸等设计参数,这些参数对于商用电机很难准确获取;同时离线测量电感,受电流传感器精度、逆变器非线性等因素影响,不易得到准确的电感模型。
针对常规估计d轴方波电压注入无位置传感器控制中由交叉饱和效应引起的位置误差问题,本文提出一种变角度方波电压信号注入无位置传感器控制策略,通过调整方波电压注入角,并在注入电压坐标系上提取差分电流信息,可消除交叉饱和效应导致的位置估计误差。由于所提方法无需获取准确dq轴自感和互感参数,有效提高了位置估计精度,且易于工程实现。最后,将本文所提方法在永磁同步电机驱动平台上进行了实验验证。
考虑磁场交叉饱和效应的高频电感矩阵为非对角阵。为了进一步简化分析,引入电感各向异性坐标,在该坐标系上电感矩阵为对角阵。
首先介绍本文所使用的坐标系,各坐标系位置关系如图1所示,包含ab、dq、估计dq()、DQ、fg坐标系,分别用上标s、r、、a、u表示。其中,DQ坐标系为电感各向异性坐标系,为D轴与a 轴之间夹角。此外,本文引入注入电压坐标系fg,它和坐标系之间的夹角定义为注入角,用表示。
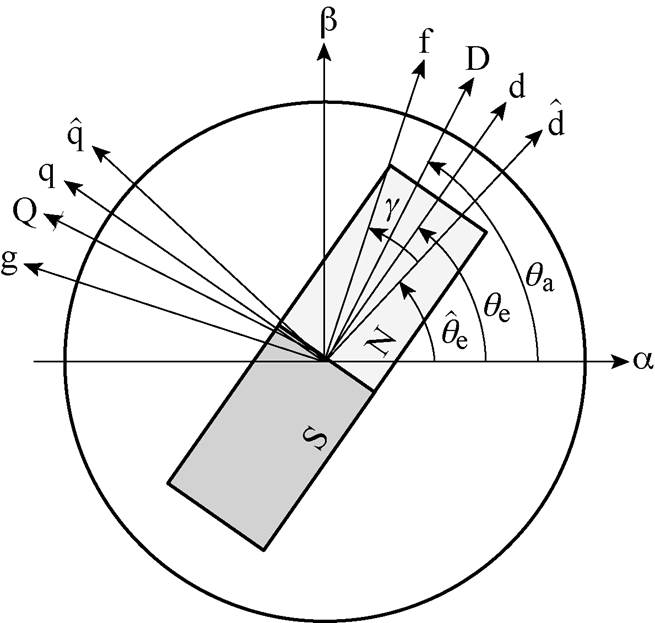
图1 各坐标系位置关系
Fig.1 Coordinates relationship
考虑磁场交叉饱和效应,建立永磁同步电机在dq坐标系上的电压方程为
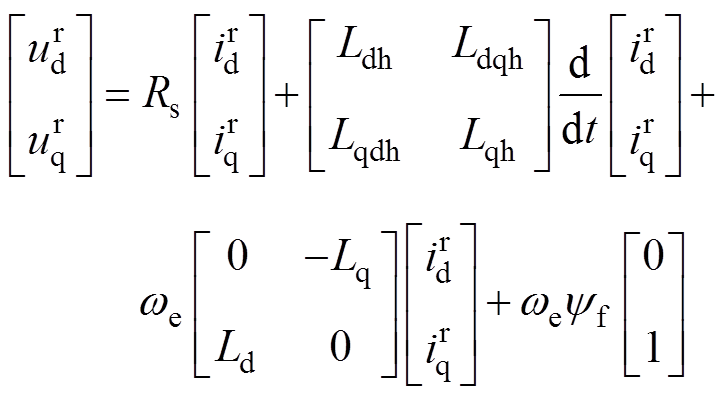 (1)
(1)式中, ,
,  、
、 ,
,  分别为d、q轴电压、电流;
分别为d、q轴电压、电流; 、
、 为d、q轴绝对式电感;
为d、q轴绝对式电感; 、
、 和
和 、
、 分别为增量式自感和互感;
分别为增量式自感和互感; 为定子电阻;
为定子电阻; 为电气角速度;
为电气角速度; 为永磁体磁链幅值。
为永磁体磁链幅值。
假设电机低速运行,注入方波电压信号的频率远高于电机运行基频,且电阻和反电动势的电压降可以忽略不计,式(1)可以简化为
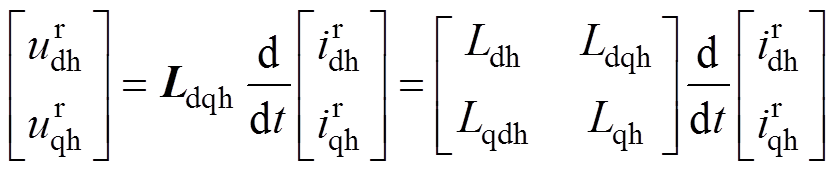 (2)
(2)式中, 为电感矩阵;下标“h”表示高频分量。
为电感矩阵;下标“h”表示高频分量。
基于能量转换定律,d、q轴互感相等,即 ,并且是半正定的(
,并且是半正定的( )。因此,非对角电感矩阵可以变换到对角电感矩阵[20]。即存在一个角
)。因此,非对角电感矩阵可以变换到对角电感矩阵[20]。即存在一个角 ,通过旋转变换,将转换为一个对角电感矩阵
,通过旋转变换,将转换为一个对角电感矩阵 ,有
,有
 (3)
(3)式中,所在坐标系即为电感各向异性坐标系; 定义为交叉饱和角;
定义为交叉饱和角; 为反Park变换矩阵,有
为反Park变换矩阵,有
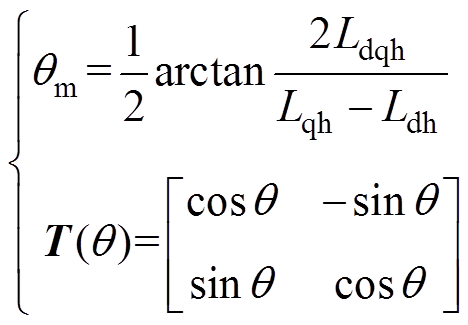 (4)
(4)
基于电感凸极模型的高频信号注入方法本质上是跟踪D轴所在位置。由于在不同磁场饱和情况下,自感和互感会随之变化,因此交叉饱和角在不同工况下是变化的,这正是造成位置估计误差的根源。
采用后向欧拉离散法,DQ坐标系上永磁同步电机的等效模型可表示为
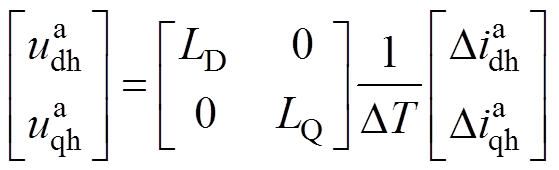 (5)
(5)式中, 、
、 为连续两个PWM周期的采样电流之差,即可用
为连续两个PWM周期的采样电流之差,即可用 来计算
来计算 时刻d、q轴的电流差值;
时刻d、q轴的电流差值; 为离散周期。
为离散周期。
常规估计d轴方波电压注入方法可基于式(5)推导,在fg坐标系上注入方波电压为
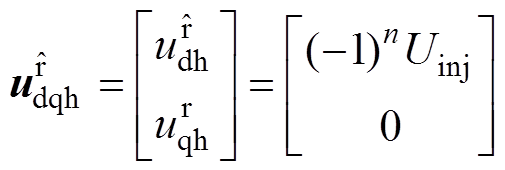 (6)
(6)式中, 为注入高频方波电压幅值。
为注入高频方波电压幅值。
将式(5)变换至坐标系,并将(6)式代入得高频电流响应为
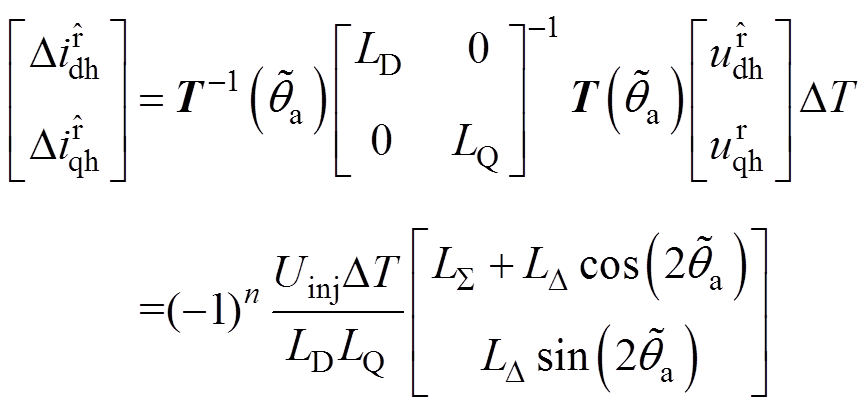 (7)
(7)其中
基于电感凸极性位置估计方法的位置估计误差表示为 ,结合定义,
,结合定义, 也可以表示为
也可以表示为
 (8)
(8)
式中, 为真实位置估计误差,
为真实位置估计误差, 。
。
根据上述关系,式(7)中的 轴差分电流
轴差分电流 可重写为
可重写为
 (9)
(9)式中, 为差分电流幅值。可见,包含位置估计误差信息,可用于位置估计。式(9)标幺化后,化简为
为差分电流幅值。可见,包含位置估计误差信息,可用于位置估计。式(9)标幺化后,化简为
 (10)
(10)
通常,将 作为位置跟踪观测器的输入,然而由于的存在,位置估计误差无法收敛至0,而收敛至,即位置估计误差等于交叉饱和角。
作为位置跟踪观测器的输入,然而由于的存在,位置估计误差无法收敛至0,而收敛至,即位置估计误差等于交叉饱和角。
由上述分析可知,常规估计d轴方波电压注入方法忽略了交叉饱和电感,将会导致位置估计稳态误差[8]。为消除该误差,文献[17]提出一种考虑交叉饱和补偿的位置观测器,如图2所示。角度补偿部分 通过查表(Look-Up Table, LUT)得到,被添加在位置跟踪观测器的输入端。这种方法的缺点是需要准确知道不同dq轴电流下的增量式电感、和,用于计算补偿角。虽然通过有限元分析或大量离线实验可以获得较精确的电感模型,然后制作成相应表格进行在线查询补偿。但这种补偿方式准确性取决于电感模型精度,且要求工程师具有较好的电感建模能力,实现起来不容易。在本文所提方法中,希望省去复杂的电感建模过程,依然能够实现交叉饱和效应的准确补偿。
通过查表(Look-Up Table, LUT)得到,被添加在位置跟踪观测器的输入端。这种方法的缺点是需要准确知道不同dq轴电流下的增量式电感、和,用于计算补偿角。虽然通过有限元分析或大量离线实验可以获得较精确的电感模型,然后制作成相应表格进行在线查询补偿。但这种补偿方式准确性取决于电感模型精度,且要求工程师具有较好的电感建模能力,实现起来不容易。在本文所提方法中,希望省去复杂的电感建模过程,依然能够实现交叉饱和效应的准确补偿。
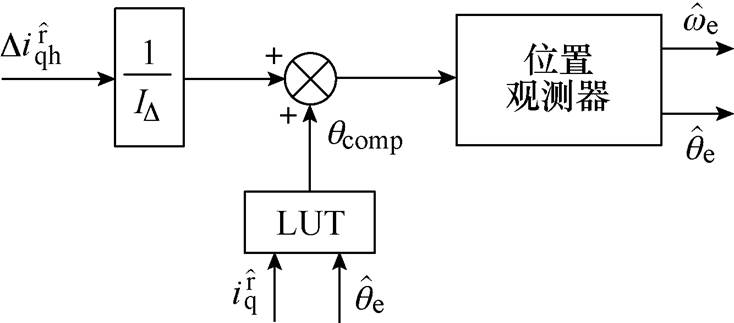
图2 具有交叉饱和补偿的位置观测器
Fig.2 Position observer with cross-saturation compensation
为了补偿由交叉饱和效应产生的位置估计误差,提出一种变角度方波电压信号注入位置估计方法。
永磁同步电机在有位置传感器控制模式下运行,同时采用常规估计d轴方波电压注入方法估计位置,测定在不同dq轴电流下的位置估计误差 。由1.2节分析可知,该误差角近似为交叉饱和角,用
。由1.2节分析可知,该误差角近似为交叉饱和角,用 表示。图3为在dq轴电流平面实测点和拟合曲面,曲面通过对测量点进行多项式拟合方式获得。由图3可知,由交叉饱和效应引起的位置估计误差绝对值会随着d轴或q轴的电流增加而增大,的最大值和最小值分别达到了0.3rad和-0.3rad。
表示。图3为在dq轴电流平面实测点和拟合曲面,曲面通过对测量点进行多项式拟合方式获得。由图3可知,由交叉饱和效应引起的位置估计误差绝对值会随着d轴或q轴的电流增加而增大,的最大值和最小值分别达到了0.3rad和-0.3rad。
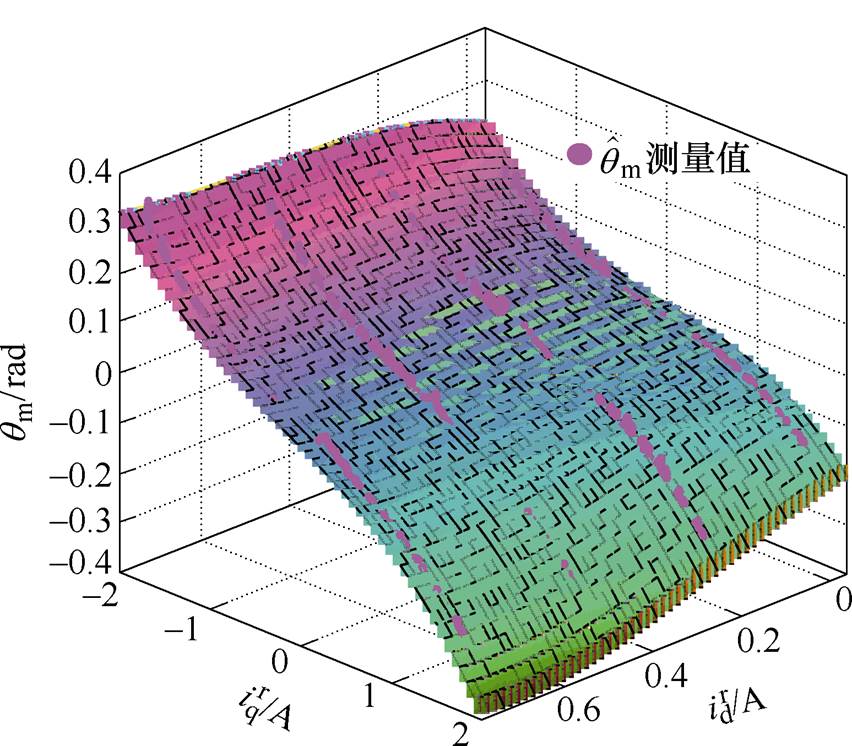
图3  在dq轴电流平面上的实测点和拟合曲面
在dq轴电流平面上的实测点和拟合曲面
Fig.3 Measured points and fitted curves of in dq axes current plane
根据和dq轴系电流的关系可设计相应的补偿曲线。特别地,对于所采用的 控制,可将近似为关于q轴电流的直线,即
控制,可将近似为关于q轴电流的直线,即
 (11)
(11)式中,km为补偿比例系数。
在注入电压坐标系fg上,沿着f轴注入方波电压脉冲信号,g轴不注入电压,表达式为
 (12)
(12)图4展示了f轴上注入方波电压信号与PWM载波信号之间的关系,其中,注入方波频率为PWM频率的一半,电流采样频率与PWM频率一致。
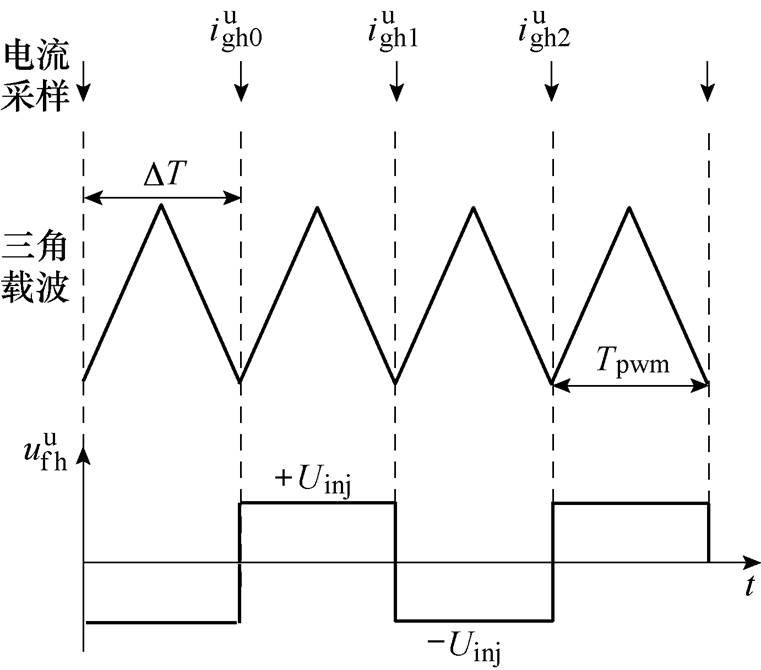
图4 f轴上注入方波电压及电流采样时刻
Fig.4 Square-wave voltage injection patten on f-axis and current sample sequences
将式(12)通过旋转变换到坐标系,得到
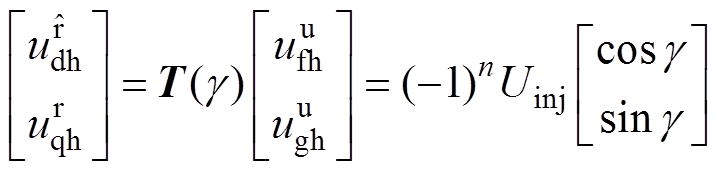 (13)
(13)将式(13)代入式(7),得坐标系上差分电流为
 (14)
(14)
由式(14)可知,电流差分信号与注入角g 相关,常规基于轴的电流差分解调方式不再适用,因此将式(14)进一步旋转变换到fg坐标系得
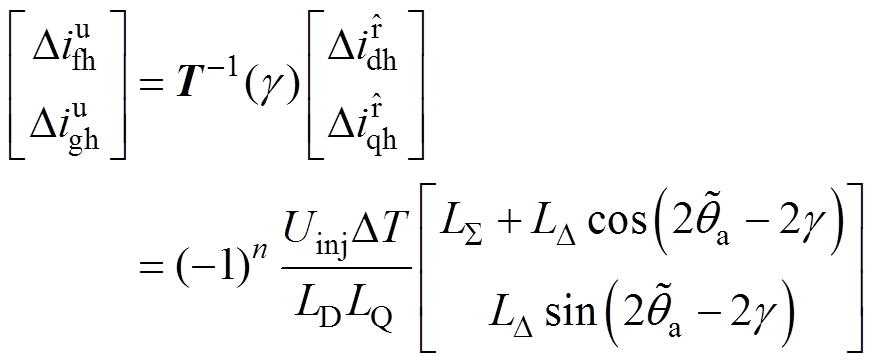 (15)
(15)由式(15)可知,若采用g轴差分电流进行位置估计,则位置估计误差将包含交叉饱和角和注入角g。
将式(8)代入式(15),g轴差分电流可重写为
 (16)
(16)若设置注入角 ,式(16)改写为
,式(16)改写为
 (17)
(17)
式(17)不同于式(10)所示的传统位置估计误差,通过改变注入方波电压角度,即注入角设置为,可消除交叉饱和电感导致的位置估计误差。其中,可根据实验测量和曲线拟合获得,如图3和式(11)所示。所提方法的优点是不需要准确电感值的信息,只利用了不同电流下的位置估计误差来补偿交叉饱和效应。
在低速运行时,采用高频信号注入方法的无位置传感器驱动控制经常受到逆变器功率管压降、死区时间等非线性因素的影响,引起注入电压矢量畸变,实际输出电压幅值降低,导致高频电流响应估计转子角度时存在位置估计误差[21]。文献[22]提出依次注入幅值、作用时间相等的正负电压矢量,可消除逆变器非线性因素对位置估计精度的影响。因此,本文也采用正负电压矢量注入方式,参照图4所示的电压注入形式及电流采样时刻。然后计算一对正负方波电压中两个g轴差分电流之差用于转子位置估计,有
 (18)
(18)将式(18)计算的g轴差分电流之差输入锁相环,可以实现位置、速度估计,如图5所示。其中,kp和ki分别为锁相环的比例、积分系数。
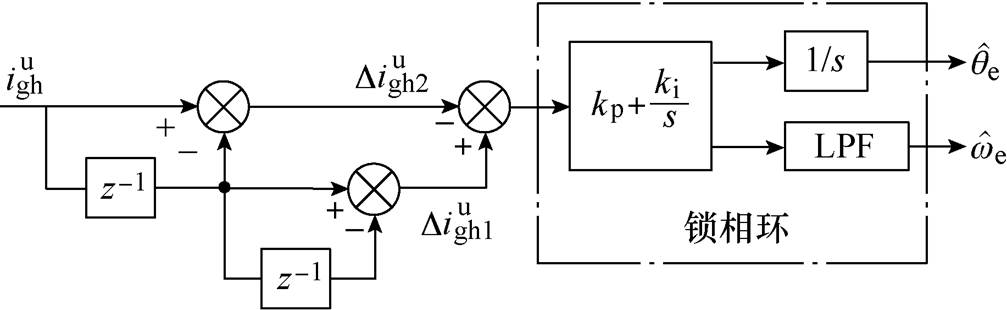
图5 位置误差信号提取及位置观测器
Fig.5 Position error extraction and position observer
在式(18)所示的差分电流计算和图5所示位置解调过程中,避免了带通和低通滤波器的使用,保证了位置估计的快速性和准确性。并且,利用三个连续采样的电流,先计算g轴差分电流再作差的方法避免了逆变器非线性因素对位置估计的影响。
此外,对于电机相线上串电流传感器进行相电流隔离采样场合,可以在一个PWM周期中计数器过零和周期两次事件中都更新占空比,并采样两次相电流,即双更新双采样,注入方波电压的频率可进一步提高至PWM频率,以降低高频噪声。
综上分析,本文所提出的变角度方波电压注入永磁同步电机无位置传感器控制策略框图如图6 所示。
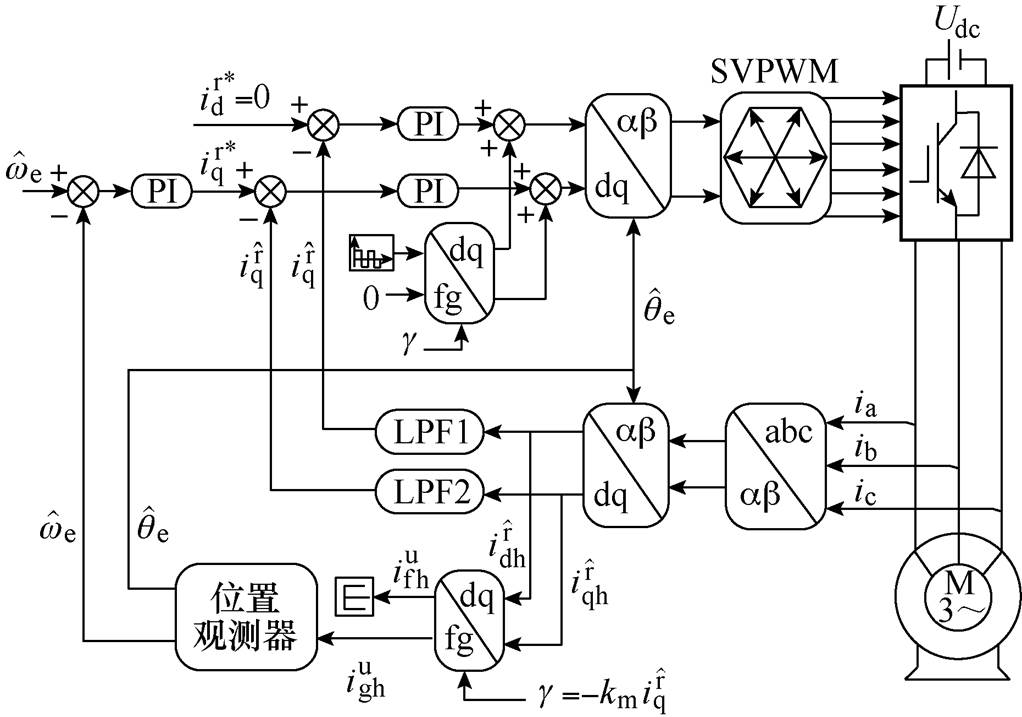
图6 变角度方波电压注入永磁同步电机无位置传感器控制策略结构框图
Fig.6 Block diagram of variable angle square-wave voltage injection for sensorless control of PMSM
所提策略具体实现流程如下:
(1)根据当前dq轴电流,确定电压注入角g。
(2)将方波电压注入至fg坐标系中的f轴上。
(3)通过坐标变换,把估计dq轴系上的电流采用旋转变换至fg坐标系,得到的g轴差分电流中包含转子位置估计误差,但消除了交叉饱和角。
(4)通过两个PWM周期的g轴差分电流相减来得到位置误差函数如式(18)所示,将其作为锁相环的输入,得到估计位置和估计速度。
为了验证本文所提策略的有效性,搭建如图7所示的200W永磁同步电机驱动平台。其中,负载为磁滞测功机,可提供0~5N·m的阻抗性力矩,永磁同步电机参数见表1。在本实验平台中,采用TI公司的高压电机控制开发套件。该套件额定功率为750W,控制芯片采用TI公司的数字信号处理器(Digital Signal Processor, DSP)(TMS320F28335),逆变电路采用三菱公司的智能功率模块PS21765。PWM开关频率为20kHz,死区时间设置为1.5ms。系统通过逆变桥三路下桥臂上的20mW 采样电阻分别采集三相电流,采样频率与PWM开关频率一致,并经过增益为8.25倍的运放调理电路后进入DSP的模数转换器(Analog to Digital Converter, ADC)。实验中,真实转子位置由2 500线的光电编码器获得,仅用于与估计位置、估计速度进行对比。
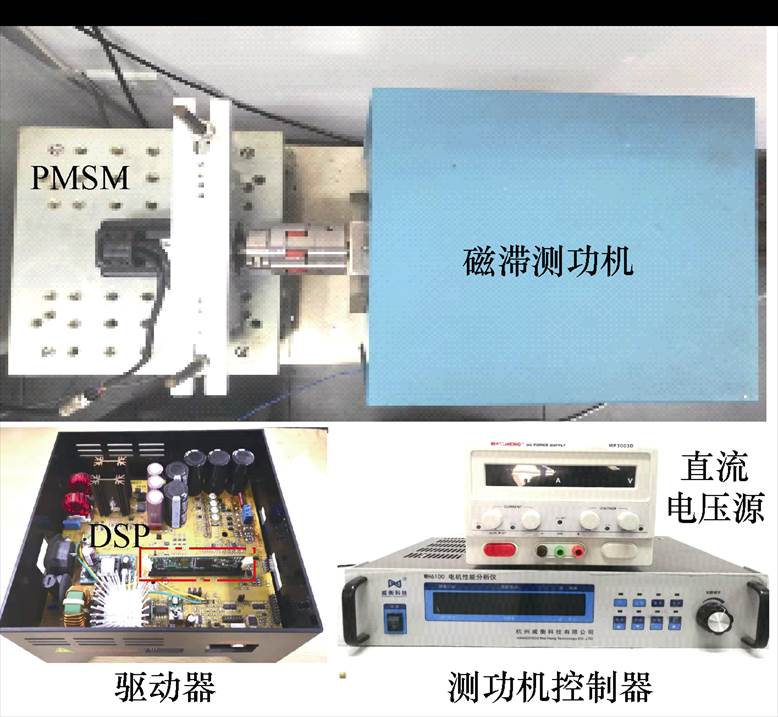
图7 永磁同步电机驱动平台
Fig.7 Platform of PMSM drive system
表1 实验用PMSM参数
Tab.1 Parameters of the test PMSM
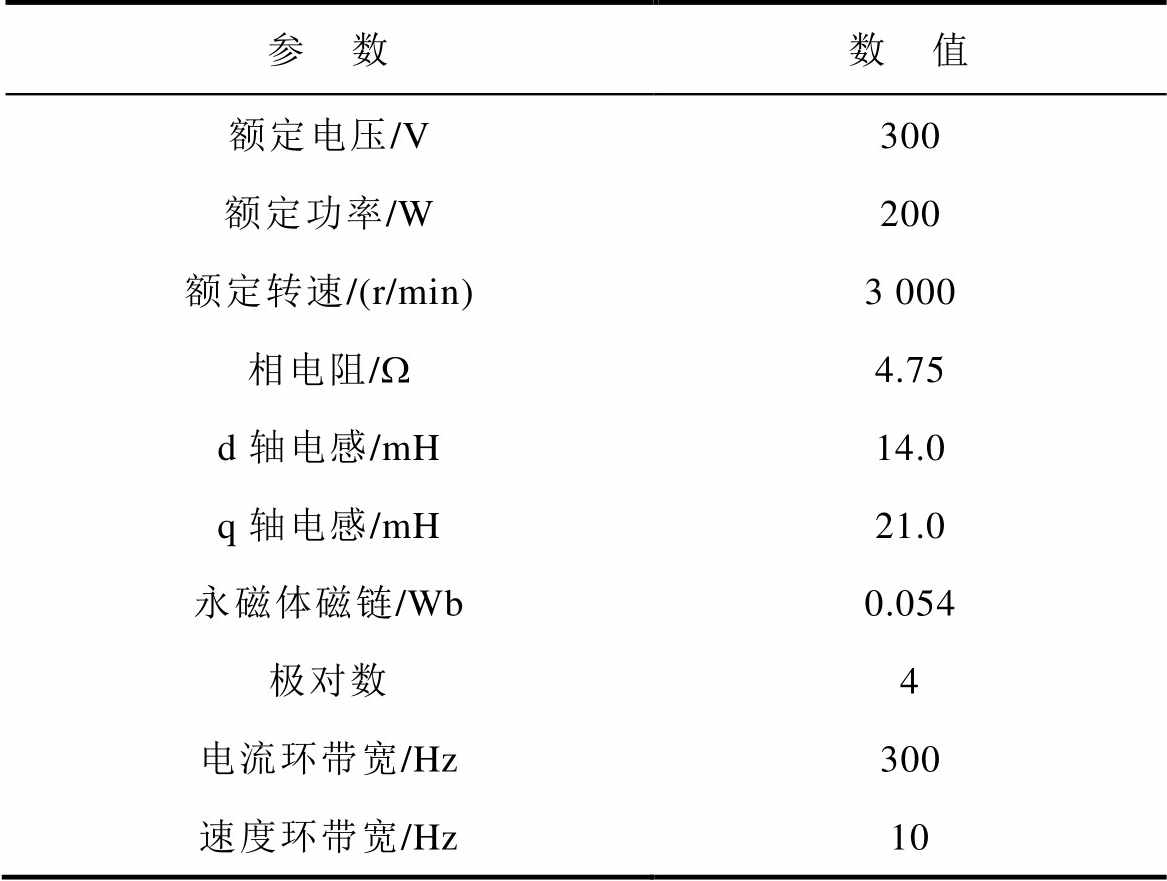
参 数数 值 额定电压/V300 额定功率/W200 额定转速/(r/min)3 000 相电阻/W4.75 d轴电感/mH14.0 q轴电感/mH21.0 永磁体磁链/Wb0.054 极对数4 电流环带宽/Hz300 速度环带宽/Hz10
实验中,根据电机电阻和电感参数设计电流环带宽为300Hz,电流环回路低通滤波器LPF1和LPF2的截止频率均为1 365Hz,如图6所示;速度环带宽设计为10Hz。考虑注入角随着q轴电流的变化而实时改变,因此需要对q轴电流进行滤波后用于注入角g 的计算。通过实验测得,经过LPF2后的q轴电流波动导致的注入角波动在±1°电角度内,对注入角影响较小,因此本文采用LPF2的q轴电流用于注入角计算。
为方便下文描述,以下称常规基于估计d轴方波电压注入的位置估计策略为常规方法,本文所提的变角度方波电压注入位置估计策略为所提方法。两种方法注入的高频方波电压频率均为10kHz,电压幅值为51.8V。以下所有实验均在永磁同步电机无位置传感器控制速度闭环的情况下进行。
图8展示了设定速度为150r/min时,在额定负载下,两种方法的位置跟踪,位置估计误差,f、g轴系和估计d、q轴系下的电流波形。从图8a实验波形可以看出,在额定负载下,由于交叉饱和效应的存在,常规方法估计得到的转子位置超前于实际转子位置,且产生位置估计误差在12°左右。而采用本文所提方法,位置估计误差在0°附近。同时,在额定负载情况下,由于注入角g 增大,f轴上的电流相较于估计d轴有所上升,而g轴电流和估计q轴相比则有所下降。本实验表明所提方法可提高重载稳态情况下位置估计精度。下面实验将进一步对比分析所提方法的动、静态性能。

图8 额定负载下150r/min位置跟踪及电流波形
Fig.8 Position tracking and currents waveforms at 150r/min under rated load torque
图9为额定负载下,150r/min正反转实验结果,分别展示了位置跟踪、位置误差和q轴电流波形。本实验中,在1s时,电机由150r/min阶跃至-150r/min。常规方法的位置估计误差波动的平均值达到了24.3°,如图9a所示。而采用所提方法,位置估计误差一直维持在0°附近,如图9b所示。该实验验证了所提方法在额定负载正反转情况,均能有效补偿磁场交叉饱和效应引起的位置估计误差,且动态性能与常规方法相近。

图9 额定负载下150r/min正反转实验
Fig.9 150r/min speed reverse experiment at rated torque
图10为在额定负载下,速度指令在1s左右时由150r/min阶跃至300r/min,在2.5s左右时再阶跃回到150r/min的实验结果,从上至下依次是估计位置、位置估计误差、实际转速和估计转速的波形。从实验结果可以看出,两种方法均能够快速响应速度变化指令,且两者动态性能接近。但是常规方法有10.9°稳态位置估计误差,而所提方法置估计误差始终在0°附近。
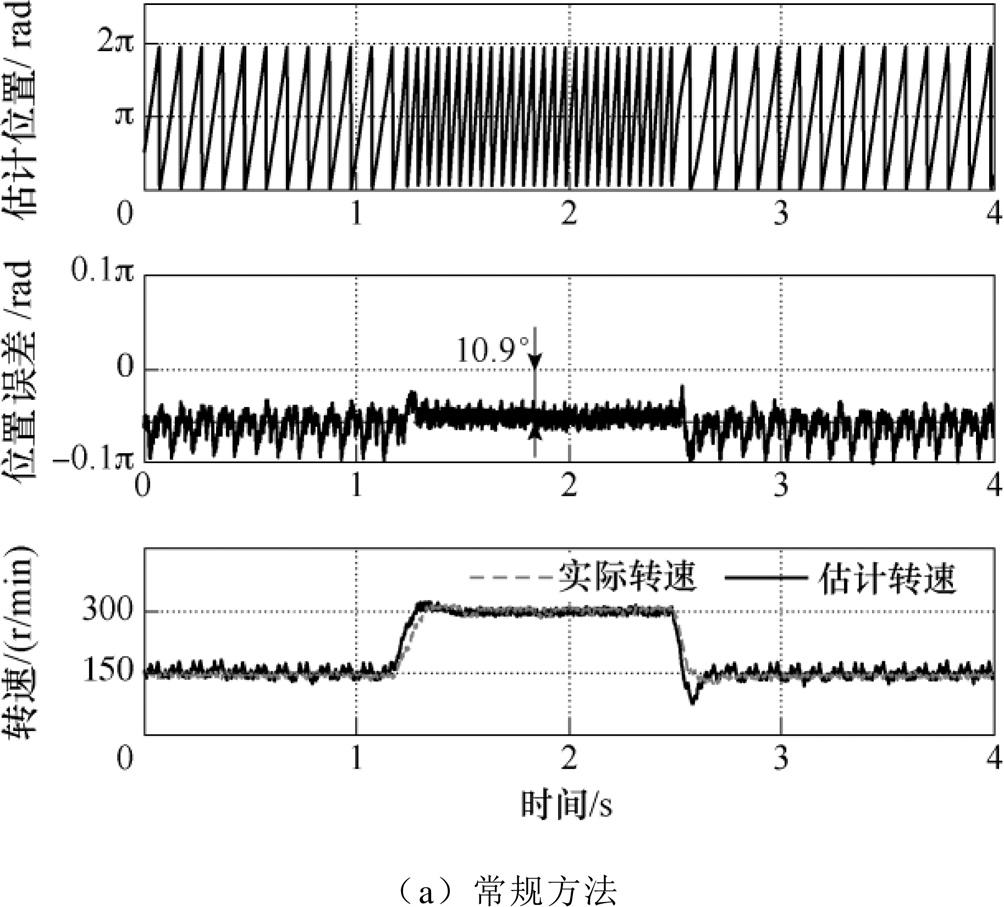
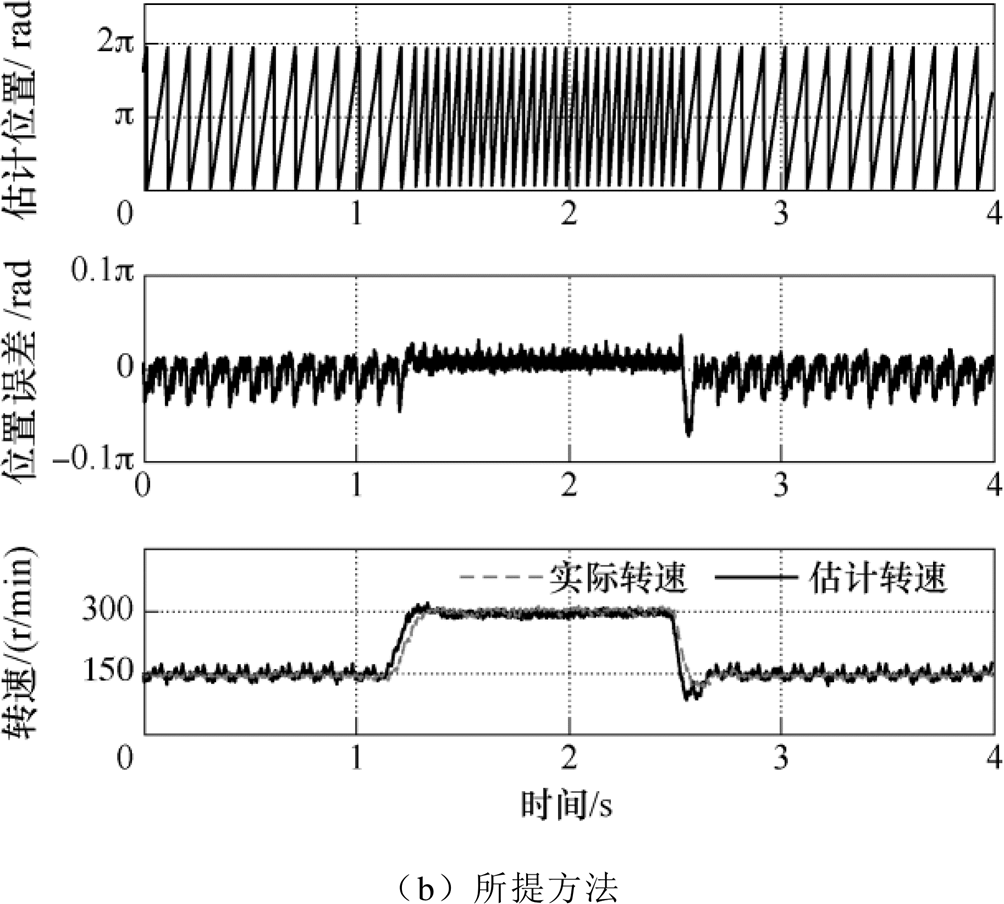
图10 额定负载下速度阶跃响应实验
Fig.10 Speed step experiment at rated load torque
图11为在150r/min情况下,突加/突卸额定负载的实验结果。从上至下依次为估计位置误差、实际转速和估计转速、q轴电流实验波形。由实验结果可以看出,两种方法都可以快速响应负载变化,在额定负载下,常规方法由于交叉饱和效应会产生11.5°的位置估计误差,而所提方法仅在动态过程中出现误差,稳态时位置误差为零。

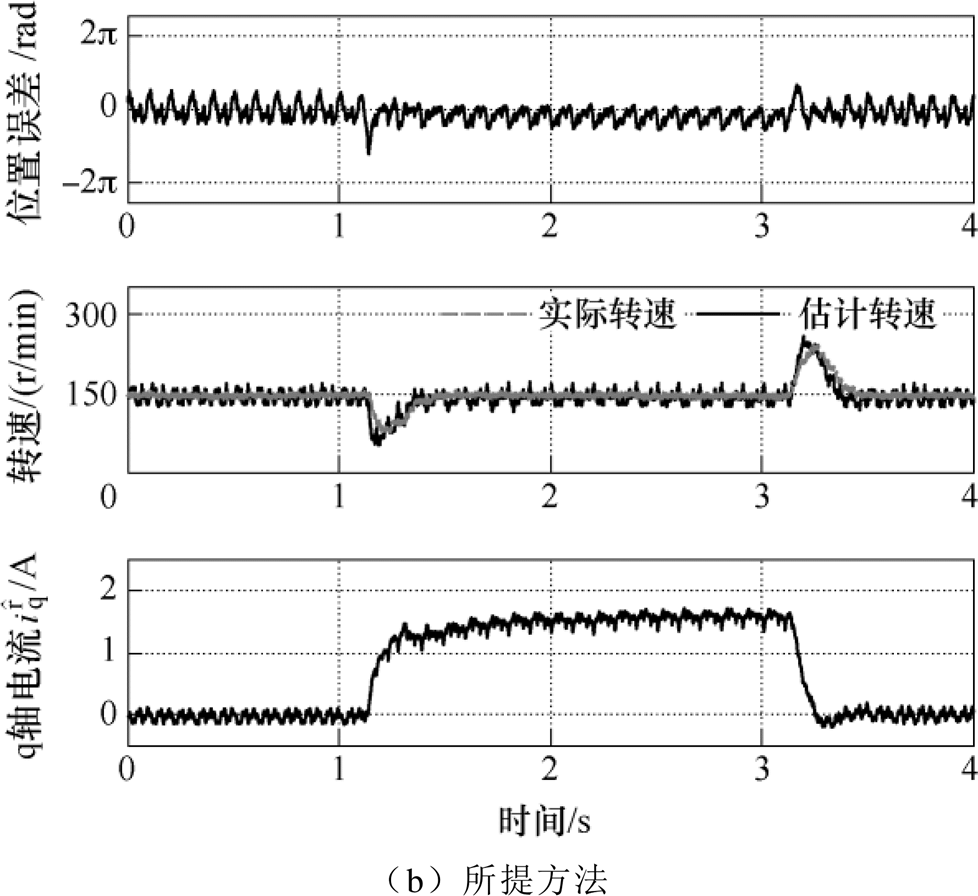
图11 150r/min下突加/突卸额定实验
Fig.11 Rated torque step experiment at 150r/min
从以上实验结果可知,由于磁场交叉饱和效应,传统估计d轴方波电压注入方法无法准确跟踪转子实际位置,会随着负载增大而产生位置估计误差。所提变角度方波电压注入方法则会根据实际工况,实时调整方波电压注入角,消除了交叉饱和效应导致的位置估计误差,提高了位置估计精度,且动态性能和常规方法基本相似。
本文提出一种考虑磁场交叉饱和效应补偿的变角度方波电压注入永磁同步电机无位置传感控制策略。所提方法将由磁场交叉饱和效应导致的位置估计误差作为注入角,在注入电压同步旋转坐标系fg的f轴上注入方波电压,并通过提取g轴差分电流实现位置估计。本文所提交叉饱和效应补偿方法,无需准确知道不同dq轴电流下的自感和互感参数,只需要通过离线测量不同dq轴电流下的交叉饱和角,并拟合出交叉饱和角关于q轴电流的曲线,实现在线补偿。将本文所提方法与常规估计d轴方波电压注入方法进行实验对比,在不同工况下,所提策略可消除磁场交叉饱和效应导致的位置估计误差,提高了位置估计精度,同时具有优异的动态性能,从而验证了本文所提策略的有效性。
参考文献
[1] Xu Dianguo, Wang Bo, Zhang Guoqiang, et al. A review of sensorless control methods for AC motor drives[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(1): 104-115.
[2] Bolognani S, Ortombina L, Tinazzi F, et al. Model sensitivity of fundamental-frequency-based position estimators for sensorless PM and reluctance synchronous motor drives[J]. IEEE Transactions on Industrial Electronics, 2018, 65(1): 77-85.
[3] 王高林, 李卓敏, 詹瀚林, 等. 考虑逆变器非线性的内置式永磁同步电机转子位置锁相环观测器[J]. 电工技术学报, 2014, 29(3): 172-179.
Wang Gaolin, Li Zhuomin, Zhan Hanlin, et al. Phase-locked-loop rotor position observer for IPMSM considering inverter nonlinearity[J]. Transactions of China Electrotechnical Society, 2014, 29(3): 172- 179.
[4] 杜博超, 韩守亮, 张超, 等. 基于自抗扰控制器的内置式永磁同步电机无位置传感器控制[J]. 电工技术学报, 2017, 32(3): 105-112.
Du Bochao, Han Shouliang, Zhang Chao, et al. Sensorless control of interior permanent magnet synchronous motor based on active disturbance rejection controller[J]. Transactions of China Electro- technical Society, 2017, 32(3): 105-112.
[5] 吴春, 齐蓉, 李兵强, 等. 考虑饱和效应的永磁同步电机全程无位置传感器控制[J]. 电工技术学报, 2017, 32(2): 171-179.
Wu Chun, Qi Rong, Li Bingqiang, et al. Whole speed range sensorless control of permanent magnet synchronous motor considering saturation effect[J]. Transactions of China Electrotechnical Society, 2017, 32(2): 171-179.
[6] Corley M J, Lorenz R D. Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J]. IEEE Transactions on Industry Applications, 1998, 34(4): 784-789.
[7] Lin T C, Zhu Z Q. Sensorless operation capability of surface-mounted permanent magnet machine based on high-frequency signal injection methods[J]. IEEE Transactions on Industry Applications, 2015, 51(3): 2161-2171.
[8] Mingardi D, Morandin M, Bolognani S, et al. On the proprieties of the differential cross-saturation indu- ctance in synchronous machines[J]. IEEE Transa- ctions on Industry Applications, 2016, 53(2): 991- 1000.
[9] Guglielmi P, Pastorelli M, Vagati A. Cross-saturation effects in IPM motors and related impact on sensorless control[J]. IEEE Transactions on Industry Applications, 2006, 42(6): 1516-1522.
[10] Zhu Zhiqiang, Gong Liming. Investigation of effectiveness of sensorless operation in carrier- signal-injection-based sensorless-control methods[J]. IEEE Transactions on Industrial Electronics, 2010, 58(8): 3431-3439.
[11] Bianchi N, Fornasiero E, Bolognani S. Effect of stator and rotor saturation on sensorless rotor position detection[J]. IEEE Transactions on Industry Appli- cations, 2013, 49(3): 1333-1342.
[12] Kwon Y-C, Lee J, Sul S-K. Full torque-range low- speed sensorless drive for heavily saturated IPMSMs by manipulation of convergence point[C]//IEEE Energy Conversion Congress and Exposition, Cincin- nati, USA, 2017: 865-872.
[13] Liu Jiaming, Zhu Zhiqiang. Sensorless control strategy by square-waveform high-frequency pulsating signal injection into stationary reference frame[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(2): 171-180.
[14] 李峰, 车进, 刘大铭, 等. IPMSM动态电感辨识方法及转子位置估计误差补偿策略[J]. 电工技术学报, 2018, 33(23): 5418-5426.
Li Feng, Che Jin, Liu Daming, et al. Dynamic inductance identification method and rotor position estimation error compensation strategy for IPMSM[J]. Transactions of China Electrotechnical Society, 2018, 33(23): 5418-5426.
[15] 吴春, 董士帆, 钟德刚, 等. 基于电流过采样的永磁同步电机电压脉冲注入无位置传感器控制[J]. 电工技术学报, 2018, 33(24): 5678-5687.
Wu Chun, Dong Shifan, Zhong Degang, et al. Voltage pulse injection based sensorless control for permanent magnet synchronous machine with current oversampling method[J]. Transactions of China Electrotechnical Society, 2018, 33(24): 5678-5687.
[16] 张懿, 吴嘉欣, 李亚锋, 等. 永磁同步电机新型转子位置估计误差补偿策略[J]. 电工技术学报, 2019, 34(9): 50-57.
Zhang Yi, Wu Jiaxin, Li Yafeng, et al. New rotor position estimation error compensation strategy for permanent magnet synchronous motor[J]. Transactionsof China Electrotechnical Society, 2019, 34(9): 50-57.
[17] Lee Y, Kwon Y-C, Sul S-K, et al. Compensation of position estimation error for precise position- sensorless control of IPMSM based on high-frequency pulsating voltage injection[C]//IEEE Energy Con- version Congress and Exposition, Cincinnati, USA, 2017: 859-864.
[18] Chen Lei, Götting G, Dietrich S, et al. Self-sensing control of permanent-magnet synchronous machines with multiple saliencies using pulse-voltage-injection[J]. IEEE Transactions on Industry Applications, 2016, 52(4): 3480-3491.
[19] Li Chengrui, Wang Gaolin, Zhang Guoqiang, et al. Saliency-based sensorless control for Synrm drives with suppression of position estimation error[J]. IEEE Transactions on Industrial Electronics, 2019, 66(8): 5839-5849.
[20] Kuehl S, Kennel R M. Measuring magnetic charac- teristics of synchronous machines by applying position estimation techniques[J]. IEEE Transactions on Industry Applications, 2014, 50(6): 3816-3824.
[21] 邓国发, 王辉, 吴轩, 等. 一种可抑制逆变器非线性影响的永磁同步电机无位置传感器控制策略[J]. 中国电机工程学报, 2018, 38(24): 271-280, 354.
Deng Guofa, Wang Hui, Wu Xuan, et al. A sensorless control strategy of permanent magnet synchronous motor for suppressing nonlinear effects of inverter[J]. Proceedings of the CSEE, 2018, 38(24): 271-280, 354.
[22] Xie Ge, Lu Kaiyuan, Dwivedi S, et al. Minimum voltage vector injection method for sensorless control of PMSM for low-speed operations[J]. IEEE Transa- ctions on Power Electronics, 2015, 31(2): 1785-1794.
Variable Angle Square-Wave Voltage Injection for Sensorless Control of PMSM Considering Cross-Saturation Effect
Abstract The conventional estimation method of d-axis square-wave voltage injection can be affected by magnetic field cross-saturation, which causes rotor position estimation error. Therefore, a variable angle square-wave voltage injection for sensorless control of permanent magnet synchronous machine (PMSM) is proposed considering the compensation of cross-saturation effect. The injection voltage synchronous rotation coordinate fg is introduced and a pair of square-wave voltages is injected on the f-axis. The angle between the f-axis and the estimated d-axis is defined as the injection angle, which changes with different magnetic field cross-saturation effects. The g-axis differential current is calculated for position estimation. Due to the change of the injection angle, the g-axis differential current will no longer contain cross-saturation related information, and accurate position estimation can be realized. Finally, the proposed variable angle square-wave injection method is compared with the conventional estimated d-axis square-wave voltage injection method by experiments. The experimental results show that under different load torques and different speeds, the proposed method has high accurate rotor position estimation and fast dynamic-state performance, and is easy to implement.
keywords:Permanent magnet synchronous machine, square-wave voltage injection, magnetic field cross-saturation effect, sensorless control
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.191239
浙江省自然科学基金(LQ18E070005)和国家自然科学基金(51807179)资助项目。
收稿日期 2019-09-25
改稿日期 2020-01-15
吴 春 男,1987年生,博士,讲师,研究方向为永磁同步电机无位置传感器控制。E-mail: wuchun@zjut.edu.cn
南余荣 男,1966年生,博士,教授,研究方向为电机及电力电子系统控制。E-mail: nyr@zjut.edu.cn(通信作者)
(编辑 崔文静)