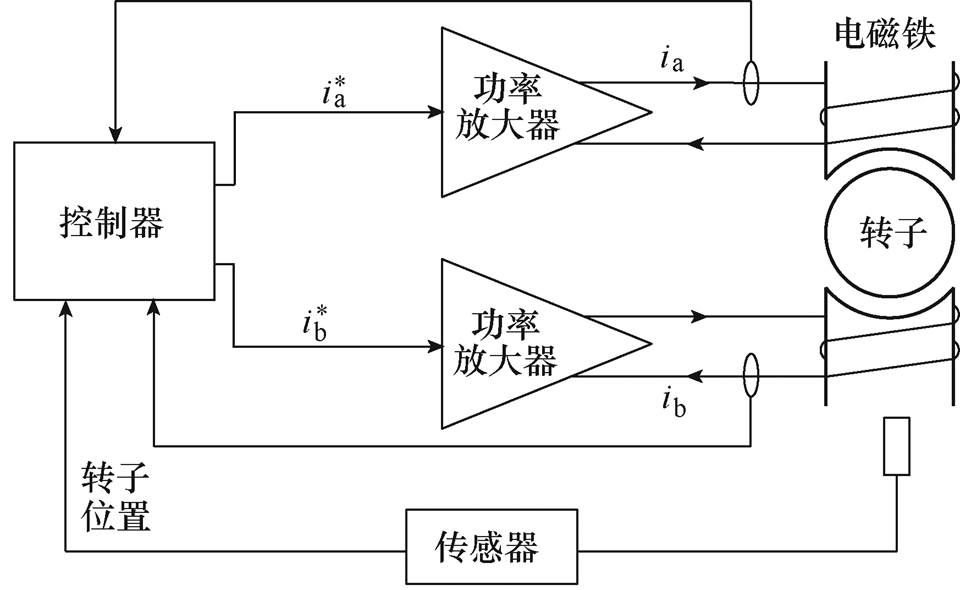
图1 AMB系统结构
Fig.1 The structure of AMB system
摘要 磁悬浮轴承系统中,功率放大器是重要组成部分。该文针对八极径向磁轴承中四个线圈电流的关系及特点,分析一种四相四桥臂拓扑的电力电子变换器在磁轴承中应用的可行性。该结构省去一些磁轴承功放中需要用到的公共桥臂,仅用四个桥臂达到对一个径向轴承上四个线圈电流的控制,实现了器件的最优化利用,显著减小了体积、降低了成本。该文分析此控制器的控制原理及调制方式,两组线圈电流控制采用相反载波从而减少了线圈电流纹波。分析电感不对称对电流控制带来的影响,提出采用不同参数PI控制器的解决方案,同时进一步分析当电感不对称无法完全补偿时对磁轴承位置的影响。对变换器进行仿真,并制作样机在四自由度磁悬浮轴承平台上进行实验验证。结果表明,该拓扑能满足磁轴承的控制需求,并能有效减小体积、降低控制器成本。
关键词:磁悬浮轴承 电力电子变换器 电流差分控制 四相四桥臂
近几十年来,磁悬浮轴承技术发展迅速。磁悬浮轴承利用电磁力实现旋转机械中转子与定子的无接触运行,因此具有无摩擦、无需润滑、无机械损耗、低功耗等优点,被广泛应用在透平机械、飞轮储能、航空、医疗等领域[1-3]。磁悬浮轴承技术目前主要的研究方向有轴承结构设计、系统建模与控制算法[4-5]、传感器技术[6]、功率放大器[7-17]等。
图1为电励磁的单自由度主动磁悬浮轴承(Active Magnetic Bearings, AMB)系统结构示意图。该系统由一对电磁铁(定子)、转子、位移传感器、控制器和功率放大器组成。通过改变流过定子上线圈的电流来改变转子受到的电磁力,从而实现对转子位移的主动控制。功率放大器作为线圈电流直接的控制环节,其性能影响着整个系统的控制性能,需要其具有准确度高、稳定性好以及响应速度快的特点。同时,在实际的应用中,也希望其成本低并且体积小[8-9]。基本的磁轴承功放拓扑如图2所示。
在磁悬浮轴承发展之初,主要使用模拟线性功放作为系统内的功率放大器[10]。由于模拟功放存在高功率损耗的问题,近年来逐渐被开关功率放大器所取代[6]。以H桥的拓扑结构作为基础的电流控制拓扑,也被广泛应用在磁轴承系统的控制中。然而,采用H桥拓扑结构需要使用两个桥臂对一个线圈电流进行控制,对一个多自由度(Degree of Freedom, DoF)的磁轴承系统来说,需要使用大量的电力电子器件,给控制器带来体积大、成本高的问题,不利于磁轴承的大规模应用及产品化。因此,针对不同类型的磁悬浮轴承,学者对系统中的功率放大器拓扑结构进行了研究与优化。
图1 AMB系统结构
Fig.1 The structure of AMB system
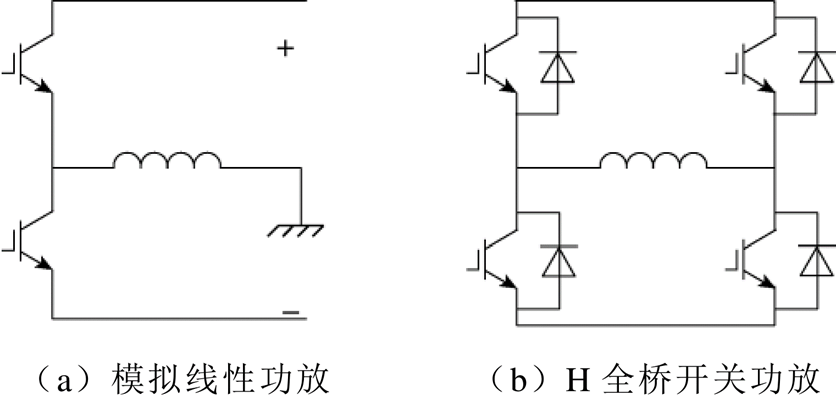
图2 基本的磁轴承功放拓扑
Fig.2 Basic topologies of power amplifier in AMB drive
对于带永磁偏置式的磁悬浮轴承,每个轴承自由度需要一个线圈,通过双向流通的线圈电流对转子进行控制,需使用双极性的电力电子变换器[11]。文献[12]提出一种五相六桥臂的电力电子变换器,文献[12-14]对其控制方式进行研究,在带永磁偏置式的五自由度的磁轴承系统中得到很好的应用。
对于不带永磁偏置的磁悬浮轴承,利用偏置电流产生偏置磁场,每个自由度需要使用两个线圈进行控制,线圈电流为单向。三相半桥拓扑让两个线圈共用一个桥臂[15],节省了25%的功率器件;共桥臂拓扑结构同样利用了共用桥臂的原理[16],采用2N+1个桥臂实现N自由度磁轴承系统中2N个线圈电流的控制,并利用电流单极性的特点,省去了一半的器件,在多轴磁轴承系统应用中能大大降低成本,减小体积,但存在公共桥臂电流应力大的缺点。针对共桥臂结构的问题,文献[17]提出反向共桥臂结构,将一半的线圈电流反向,使两个方向电流在公共桥臂中和,解决了问题并可以明显降低损耗。
上述拓扑结构主要通过使用公共桥臂来解决磁轴承系统中电流不对称的问题,对于N个线圈采用了N+1个控制桥臂。有相关文献研究如何使用N个桥臂实现磁轴承系统中N个线圈电流的控制,从而进一步降低控制器对器件的需求。
文献[18]提出了一种三极的磁轴承结构。该结构可以使用电力电子领域广泛使用的三相逆变器进行控制,无需更多的桥臂[18-19]。但三极结构的磁轴承各极之间较耦合严重,在控制上难度较高,应用受限。
图3展示了两种采用N个桥臂控制N个线圈电流的电力电子变换器拓扑结构,主要被应用于偶数相的开关磁阻电机的驱动中[20-21]。图3a为电容裂相型功率变换器,每个线圈电流可通过相应桥臂进行控制,并且相互独立。该拓扑也被应用在了磁悬浮轴承的驱动中[9]。但采用此结构容易造成电容电压不平衡,并且加在每个线圈两端的电压只存在正、负电平,会造成较大的电流纹波。图3b的拓扑结构移除了两个电容,其各线圈之间存在耦合关系,目前还尚未有相关文献讨论其在磁轴承中的应用。
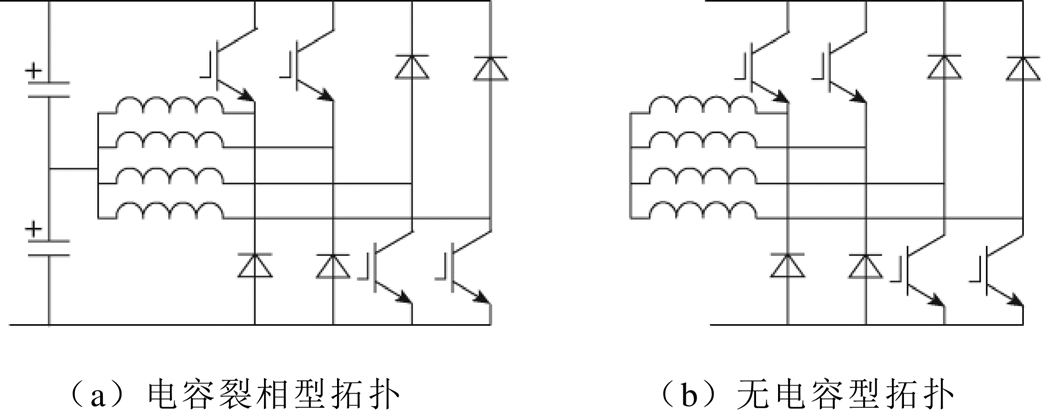
图3 N相N桥臂的电力电子变换器
Fig.3 N-phase N-leg power electronics converter
基于四桥臂的拓扑结构如图3b所示,首先,本文根据常见的八极结构的径向轴承上四个线圈电流的特点,提出了其在磁轴承系统中应用的可行性。采用该控制器仅用四个单向桥臂即可实现单个径向轴承上四个线圈电流的控制,做到了器件的最优化使用。其次,根据磁轴承系统对电流控制的需求,提出了新的控制方法,并对调制方式进行了分析,能在满足磁轴承控制功能的前提下拥有很小的电流纹波,并对实际应用中可能出现的电感不对称问题进行了分析。最后,分别进行了仿真以及实验,验证了该控制器拓扑以及控制方法在磁轴承系统中的可行性。
图4为常见的一种不带永磁体偏置的八极径向磁悬浮轴承结构。可通过控制流过其四个轴承线圈的电流来控制转子在该平面上两个自由度受到的力,从而控制转子的位移。
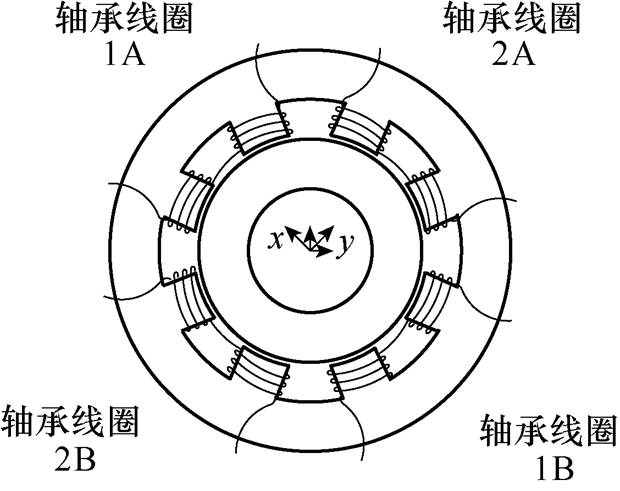
图4 八极径向磁悬浮轴承
Fig.4 The 8-pole radial magnetic bearing
图5为对转子单个自由度位置的控制框图。每个自由度由相对放置的两个轴承线圈进行控制。控制外环为位置环,转子的位置误差经过位置环控制器后得到控制电流指令值。控制内环为电流环,控制同一自由度的两个线圈采用了电流差分控制:两个线圈电流的指令值分别为偏置电流Ibias加、减控制电流ix,其中偏置电流的作用为在气隙中产生偏置磁场,控制电流作用为产生差分的电磁力。磁轴承控制电流ix在稳态下远小于偏置电流Ibias,每个线圈的电流都是单向流通的,其幅值在0~2Ibias间变化。
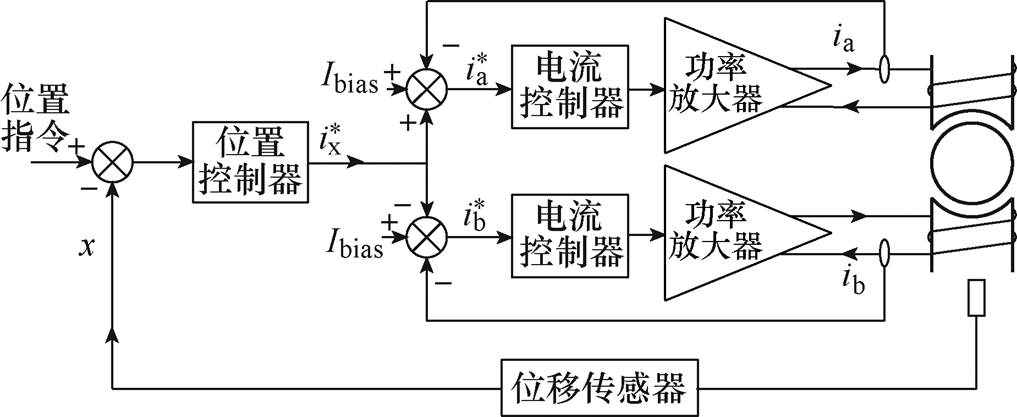
图5 单自由度磁轴承控制框图
Fig.5 The control block diagram of one-DoF AMB
由上述的电流差分控制可得,在磁悬浮轴承的控制过程中,控制同一自由度的两个线圈的电流之和始终为2Ibias,并且同一径向轴承上四个线圈的电流满足
 (1)
(1)基于四个线圈电流的关系,可将四相四桥臂结构的控制器应用于单个径向轴承线圈的电流控制中,其线圈连接方式如图6所示。在该控制器中,四个线圈的一端连接在中心连接点O处,另一端分别连接在四个线圈桥臂上。控制同一自由度的线圈L1a、L1b所连接的桥臂上桥臂为开关器件,下桥臂为二极管,其电流方向为相应桥臂中点至连接点O;控制另一自由度的线圈L2a、L2b所连接的桥臂上桥臂为二极管,下桥臂为开关器件,其电流方向为连接点O至相应桥臂中点。
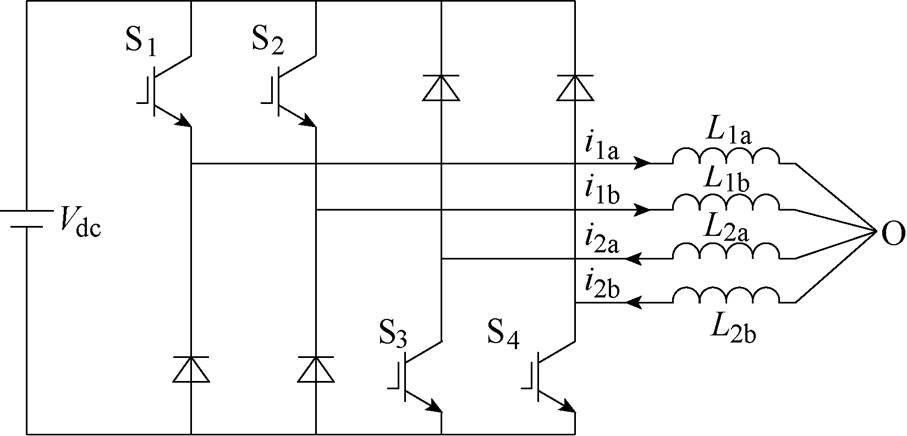
图6 应用于磁轴承系统的四相四桥臂变换器
Fig.6 Four-phase four-leg converter in AMB drive
该拓扑结构利用磁轴承线圈电流的关系,仅利用四个桥臂可实现单个径向轴承四个轴承线圈电流的控制,省去了一些控制器拓扑中所需使用的公共桥臂,做到了器件的最优化使用。另外,由于每个桥臂均为一个开关管与一个二极管反向串联,也避免了桥臂直通的风险。
通过控制各桥臂上开关器件的开通与关断,改变电路的工作模态,来实现对各线圈电流的控制。与应用于开关磁阻电机中时对电流控制的需求不同,四相四桥臂拓扑在应用于磁轴承驱动时,对同一自由度两个线圈电流的控制是耦合在一起的,要求它们的电流之和始终为2Ibias;对两个不同自由度的线圈电流控制是互相独立的,对i1a、i1b的控制并不会影响i2a、i2b的控制。本节将会对电路工作模态进行分析,并对调制方式进行讨论,以实现磁轴承所需要的控制功能。在本节前3节的分析中,假定四个线圈电感相同,第4节会分析电感不对称带来的影响。
对于每个线圈连接到相应桥臂的那一端,可通过改变桥臂上开关管的开关状态,使其通过开关器件或续流二极管连接到正、负直流母线。每一个桥臂开关管状态是独立的,每个线圈连接到线圈桥臂的一段分别有高电平和低电平两种状态,因此电路共有24=16种工作模态。根据每个模态等效的线圈连接方式,可将16种模态分为三类,如图7所示。图7a为第一类工作模态,四个线圈的一端同时连接到正直流母线或负直流母线,可得此时加在所有线圈两端的电压为0,所有线圈处于续流模态;图7b为第二类工作模态,两个线圈的一端连接到正直流母线,另外两个线圈的一端连接到负直流母线,此时加在每个线圈上的电压为50%直流母线电压;图7c为第三类工作模态,其中一个线圈的一端连接到正或负直流母线,另外三个线圈的一端连接到相反的直流母线上,此时加在一个线圈上的电压为75%Vdc,加在另外三个线圈上的电压为25%Vdc。
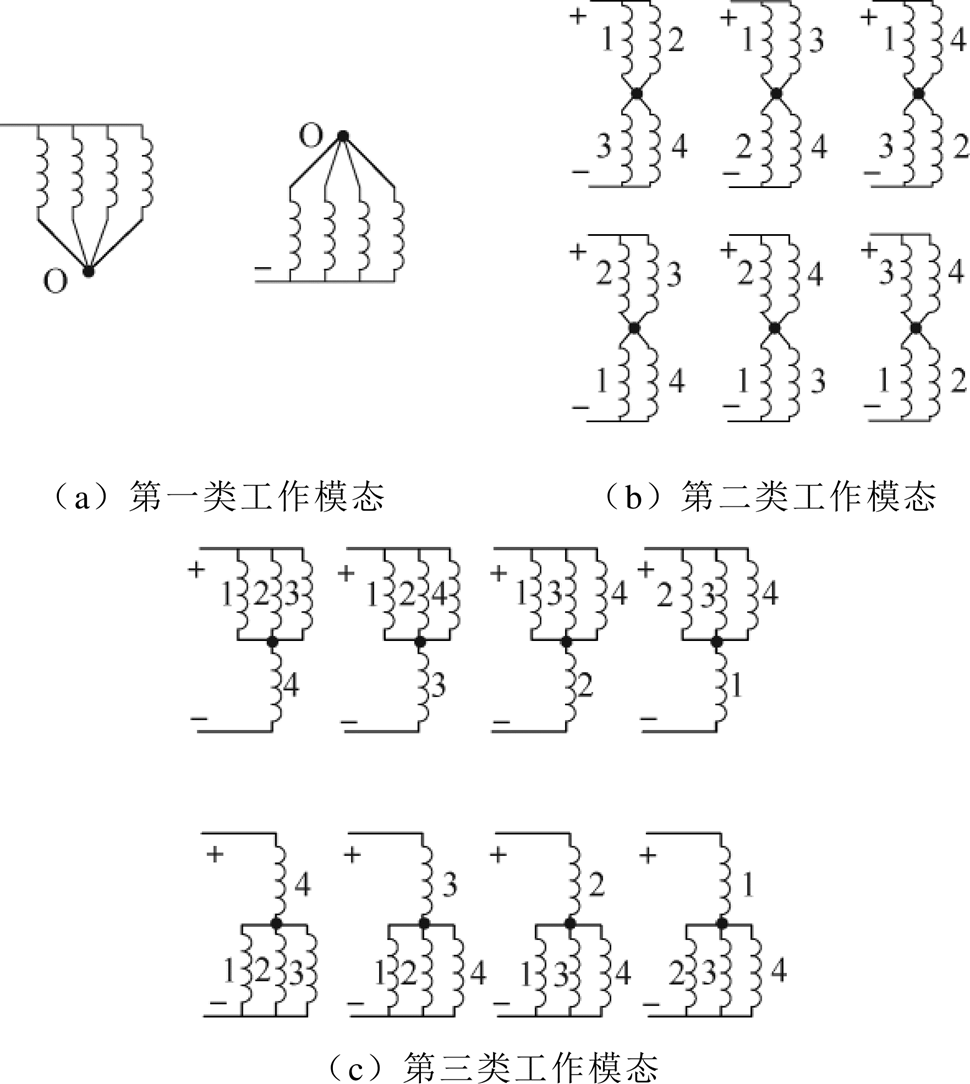
图7 控制器工作模态
Fig.7 The operating mode of converter
通过对上述模态进行组合,可以对线圈电流进行控制。
考虑四个桥臂开关器件驱动信号的占空比d1a、d1b、d2a、d2b,可得四个线圈连接在桥臂一端的平均电压分别为
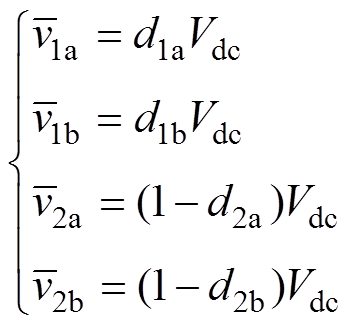 (2)
(2)式中,Vdc为直流母线电压。
因此,中心连接点O的平均电压 以及施加在每个线圈两端的平均电压分别为
以及施加在每个线圈两端的平均电压分别为
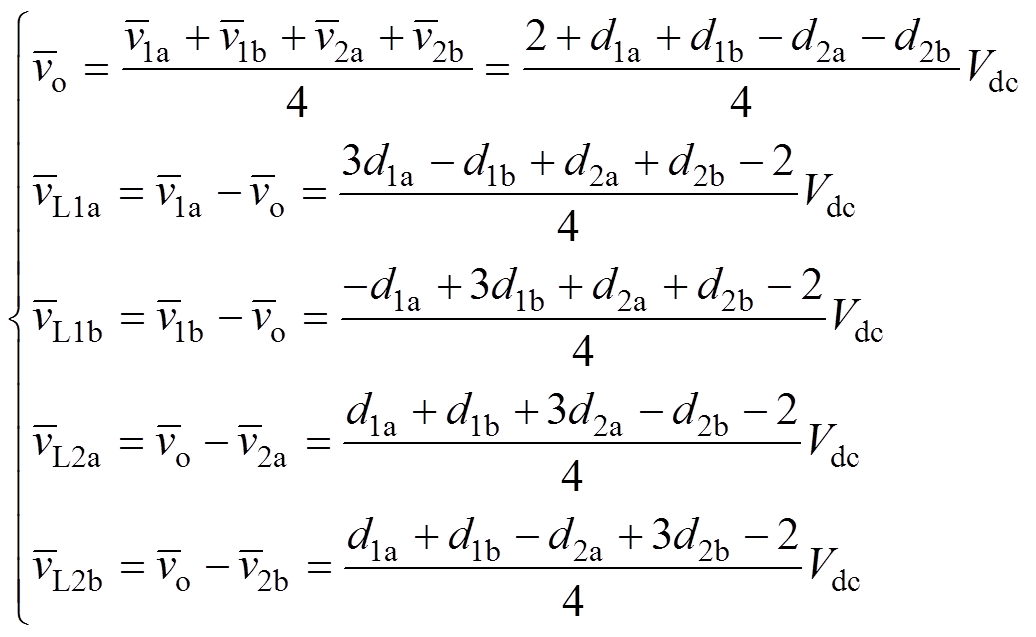 (3)
(3)在稳态时,加在所有线圈上的平均电压应为0,因此有
 (4)
(4)
电路处于稳态时所有开关管的占空比满足
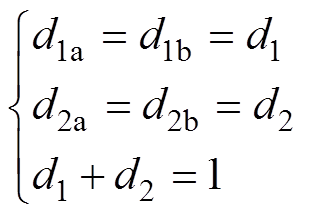 (5)
(5)式中,d1、d2分别为两组开关管稳态时的占空比。若将其都设置为0.5,并把它作为电流控制的基准值,可得到如图8所示的控制方式。图8中, 和
和 为电流参考指令值,Ibias为偏置电流值,i1afbk、i1bfbk、i2afbk、i2bfbk分别为实际电流i1a、i1b、i2a、i2b的采样反馈值。控制每个线圈电流开关管的占空比都以0.5作为基础值,加上电流控制器的输出值,来实现线圈电流的控制。在磁轴承控制中,需要实现以下电流控制功能:
为电流参考指令值,Ibias为偏置电流值,i1afbk、i1bfbk、i2afbk、i2bfbk分别为实际电流i1a、i1b、i2a、i2b的采样反馈值。控制每个线圈电流开关管的占空比都以0.5作为基础值,加上电流控制器的输出值,来实现线圈电流的控制。在磁轴承控制中,需要实现以下电流控制功能:
(1)在磁轴承启动时,四个线圈电流需同时从零上升至偏置电流,此过程中满足
 (6)
(6)(2)在磁轴承控制中,由于电流采用差分控制,因此在控制过程中满足
 (7)
(7)

图8 控制器电流控制原理
Fig.8 The principle of current control
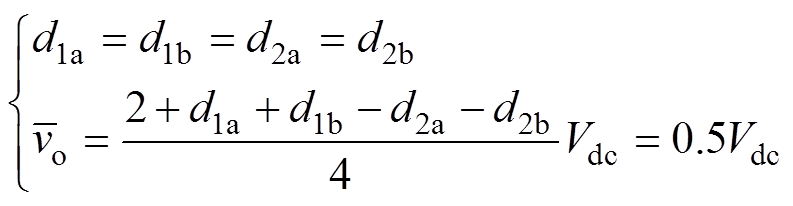
可见,基于此种控制模式下,中心连接点的平均电压始终为50%Vdc,这与在使用公共桥臂的拓扑结构中固定公共桥臂开关管50%占空比等效[8-11]。因此对于任一线圈,可得其电压方程为
 (8)
(8)因此有
 (9)
(9)
式中,L为线圈电感;R为线圈电阻;d为该线圈对应的开关管占空比; 为线圈的平均电压。
为线圈的平均电压。
由图8可得,式(9)中的 恰好为PI控制器的输出值。因此,可设置PI控制参数为
恰好为PI控制器的输出值。因此,可设置PI控制参数为
 (10)
(10)式中,wc为所期望系统带宽。此时系统的开环传递函数为
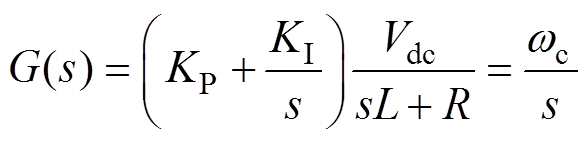 (11)
(11)
可见采用上述的控制方式以及选取控制器参数,可实现磁轴承控制中所需的电流控制功能,并使电流环拥有所期望的带宽值。
基于上述的控制方式,有以下两种调制方式:
(1)四个开关管采用相同载波。采用相同载波的调制方式如图9所示,在此调制方式下,四个开关管驱动信号相位相同,并且在稳态下处于同时开通同时关断状态,处于如图7b所示的第二类工作模态。此时中心连接点的电位保持在50%Vdc,加在四个线圈上的电压在正负50%Vdc间交替。
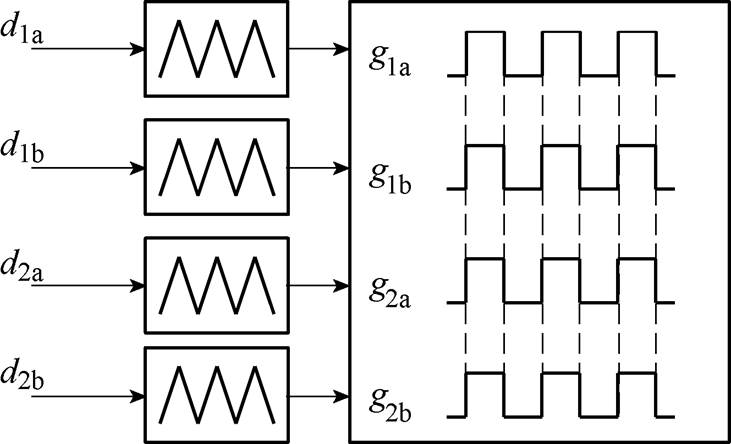
图9 采用相同载波的调制方式
Fig.9 The modulation method using the same carriers
(2)采用相位相差180°载波。采用相反载波的调制方式如图10所示,在此调制方式下,开关管S1a、S1b的驱动信号与S2a、S2b的驱动信号相位相反,稳态时在如图7a所示的两种第一类工作模态间切换。此时所有线圈都处于续流模态,加在四个线圈上的电压基本为0。
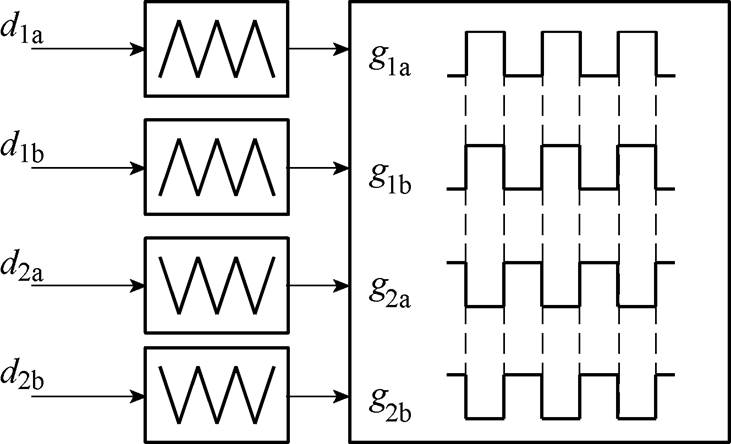
图10 采用相反载波的调制方式
Fig.10 The modulation method using reversed carriers
对比以上两种调制方式,可见采用第二种调制方式能使电路更多地处于续流工作模态,显著降低电流纹波。
在上述的讨论中,始终假定径向磁轴承的四个线圈电感值完全相同。但实际应用中,由于加工安装等因素,轴承线圈电感会有一些差别。下面对因电感不对称对系统稳态控制与动态过程带来的影响进行分析。
(1)稳态分析。设稳态时四个桥臂中点的平均电压分别为 、
、 、
、 、
、 ,中心连接点的平均电压为,四个线圈的阻抗分别为Z1a、Z1b、Z2a、Z2b,有
,中心连接点的平均电压为,四个线圈的阻抗分别为Z1a、Z1b、Z2a、Z2b,有
 (12)
(12)由式(12)可得
 (13)
(13)
若继续采用2.2节所提到的控制方式,在稳态时桥臂中点的平均电压均为50%Vdc,由式(13)可得=50%Vdc,与各电感值无关。因此电感不对称并不会影响该电路的稳态控制。
(2)动态分析。前面提到,采用该电路拓扑需要四个线圈电流满足式(1),控制同一自由度的两个线圈电感L1a、L1b不相同时,若采用相同参数的PI控制器,会使两个线圈电流动态响应速度不同,因此在动态过程中,有
 (14)
(14)但由于线圈的连接方式,依旧存在
 (15)
(15)
因此控制同一自由度的两个线圈电感不相同会对另一自由度的线圈电流控制产生影响。
由上述分析可得,电感不对称对系统动态响应产生影响的根本原因是电流动态响应的速度不同。因此,若针对不同的电感值采用不同的PI控制参数,使电流的动态响应速度相同,即可消除其影响。
在实际应用到磁轴承系统中时,由于转子位置在运行过程中会改变,导致每个线圈的气隙发生变化,因此每个线圈的电感参数也会发生变化,很难通过改变控制参数对线圈的不对称进行完全的补偿,需进一步考虑当不对称现象依旧存在时,对磁轴承位置控制的影响。
在磁轴承控制系统中,电流环为控制内环,对外环位置控制的影响主要取决于其指令跟踪准确度以及相应速度。前面分析提到,电感不对称不会对电流的稳态控制效果造成影响,因此即使不对称的现象存在,采用四相四桥臂控制器的电流内环也能很好地跟踪外环给出的电流指令,基本不会对磁轴承系统位置控制造成影响。另外,电气时间常数一般远远小于机械时间常数,由于线圈的耦合关系带来的各线圈电流在动态响应中相互的作用也不会对位置环的控制带来显著的影响。
因此在实际应用中,对于线圈电感参数的不平衡,可以在静态时对各线圈参数进行测量,采用不同PI控制参数对其进行初步的补偿。在运行过程中由于转子位置变动带来的线圈参数不平衡,即使无法完全补偿,对系统性能影响也基本可以忽略。
本节中利用Matlab/Simulink搭建了四相四桥臂控制器仿真模型,对第2节中的控制原理进行了仿真验证。仿真参数采用实际实验平台参数,见表1。
表1 控制器参数
Tab.1 The parameters of the converter

参 数数 值 直流母线电压Vdc/V150 开关频率fs/kHz20 线圈电感值L/mH10 线圈电阻值R/W1 设定系统带宽wc/Hz800
首先对电流控制中的各种情况进行仿真,仿真结果如图11所示。在最开始四个线圈的电流参考指
令都为5A,在0.02s时给第一组线圈加上1A的差分电流指令,第二组线圈电流指令不变;在0.04s时给第二组线圈加上2A的差分电流指令,第一组线圈电流指令不变。图11中展示了同样参考电流下两种调制方式控制效果的对比,图11a为采用相反的载波,图11b为采用相同的载波。由结果可以看出,两种调制方式都能很好地实现所需的电流控制功能,但采用相反的载波可以显著减小稳态时电流纹波,具有更好的控制效果。
图12展示了当两组线圈的差分电流指令分别为幅值1A,频率100Hz,相位相差90°的正弦波时的仿真结果。由结果可得,四个线圈电流i1a、i1b、i2a、i2b都能很好地跟踪上电流指令。
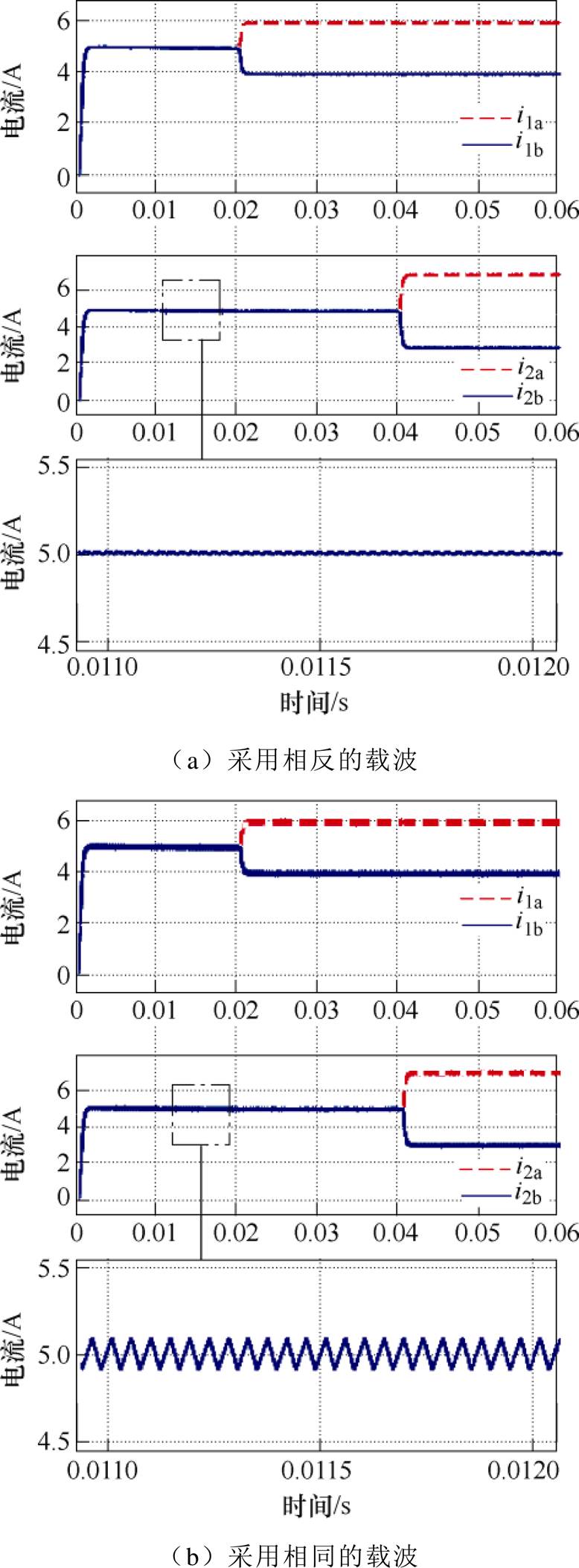
图11 电流控制仿真结果
Fig.11 The simulation results for current control
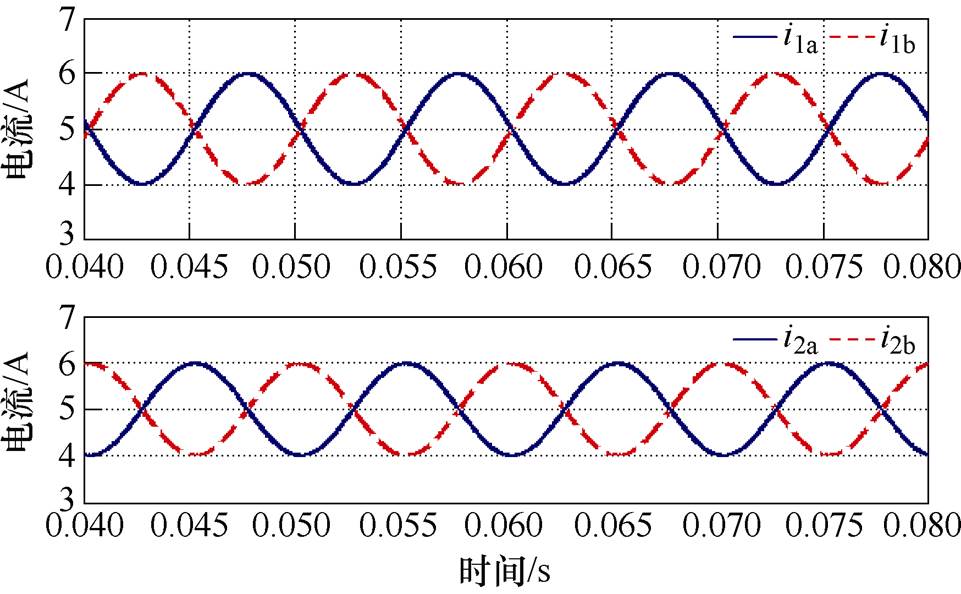
图12 正弦参考指令下电流控制仿真结果
Fig.12 The simulation results for current control at sinusoidal reference signals
由上述仿真结果可得,对于四相四桥臂控制器采用第2节中的控制方法可以实现两组线圈差分电流的独立控制,满足磁轴承控制的需求。
将线圈L1a、L2a的电感值改为20mH,L1b、L2b保持不变,此时线圈间存在不对称,重复3.1节的仿真,采用同样的PI控制器,可得仿真结果如图13所示。
如图13a所示,各线圈电流依旧能跟踪其电流指令,在稳态时等于各自的指令值,因此电感不对称对于控制器的稳态控制不会造成影响;由于L1a、L1b电感不同,当有差分电流指令时,对各自指令的动态响应速度不同,因此它们的和不再恒定,从而对i2a、i2b造成了影响,因此电感不对称会对控制器的动态响应带来影响,并对两组线圈各自的差分控制之间带来一定的耦合关系。
因此,采用2.4节中提出的办法,对各自的电感值采用不同的PI控制参数,使各线圈控制的带宽相同。修改PI控制参数之后的仿真结果如图13b所示,可见PI参数的修改重新使每个线圈动态响应速度一致,因为电感不对称带来的耦合影响被消除了。
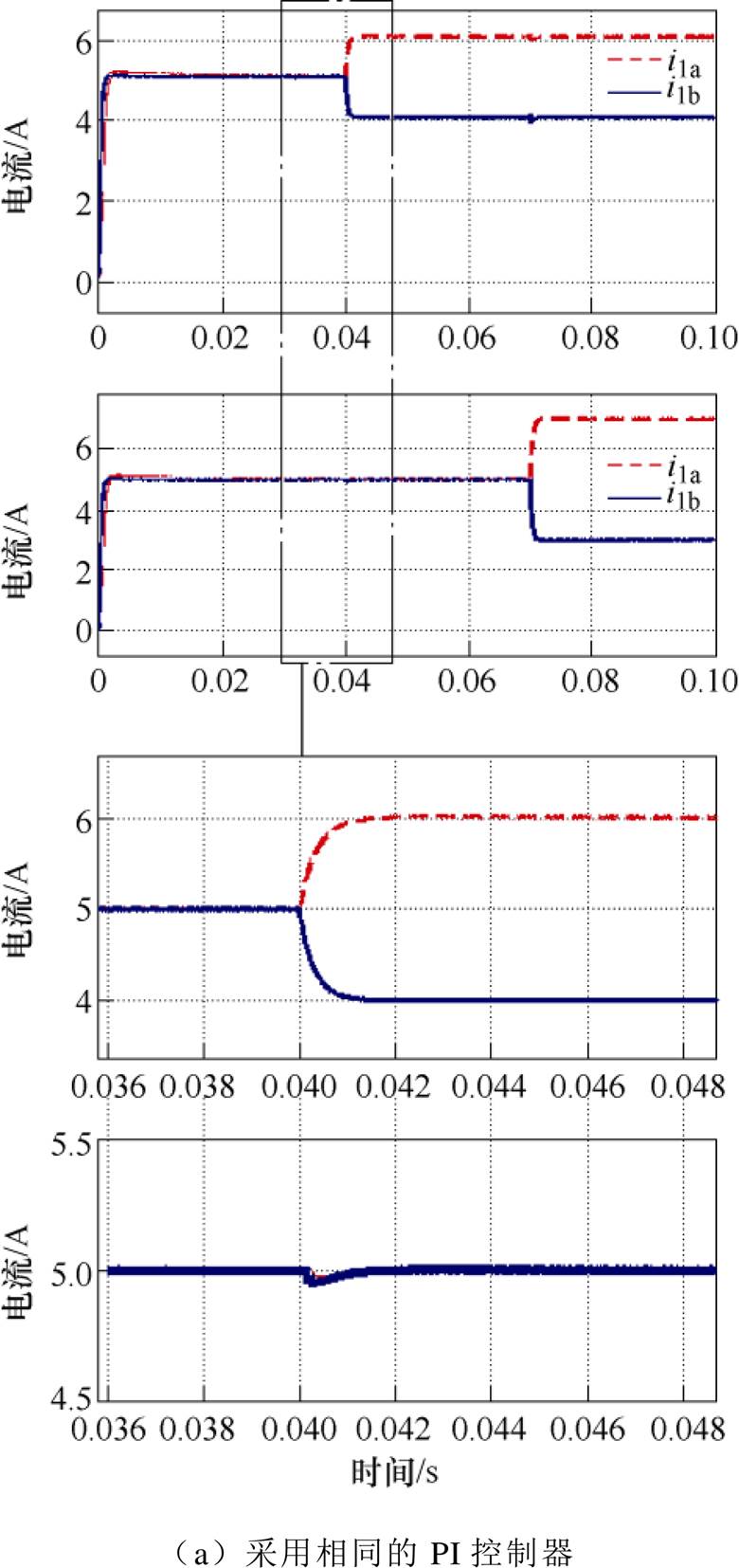
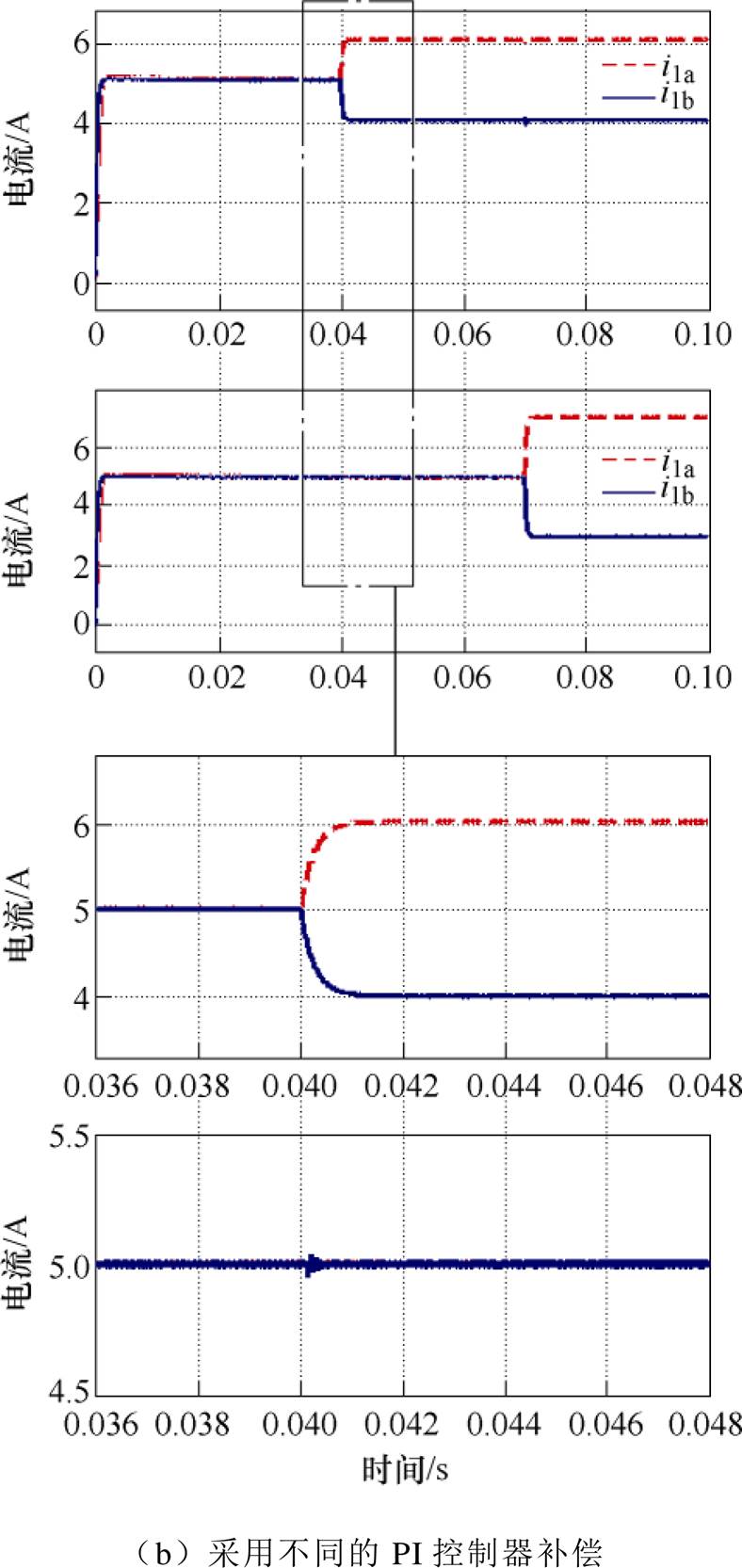
图13 电感不对称的仿真结果
Fig.13 The simulation results at inductance asymmetry
进一步地,对电感不对称对位置控制的影响进行仿真测试。在仿真中,将四桥臂控制器作为电流内环加入到磁轴承的模型中。电感不对称对位置控制的影响结果如图14所示,在一开始转子被控制在原点,各线圈电流都为5A,在0.15s时在转子x方向施加负载力,因此控制x方向的两个电流i1a、i1b需产生差分电磁力,以应对负载力,保持转子位置的稳定控制。仿真中对比了线圈对称以及不对称时电流以及转子位置的变化情况,在线圈不对称时,线圈电流动态响应过程会受到影响,相互之间也会有耦合,但转子位置变化基本没有区别。可见即使在应用中线圈不对称无法完全补偿,对磁轴承的性能影响也可以忽略。
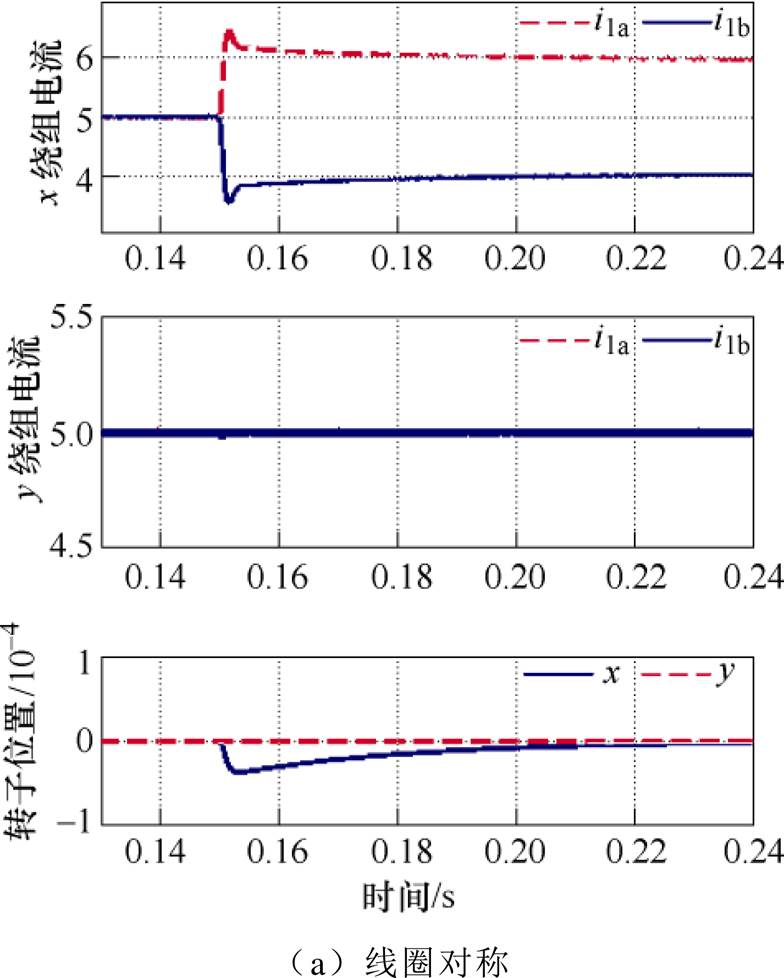
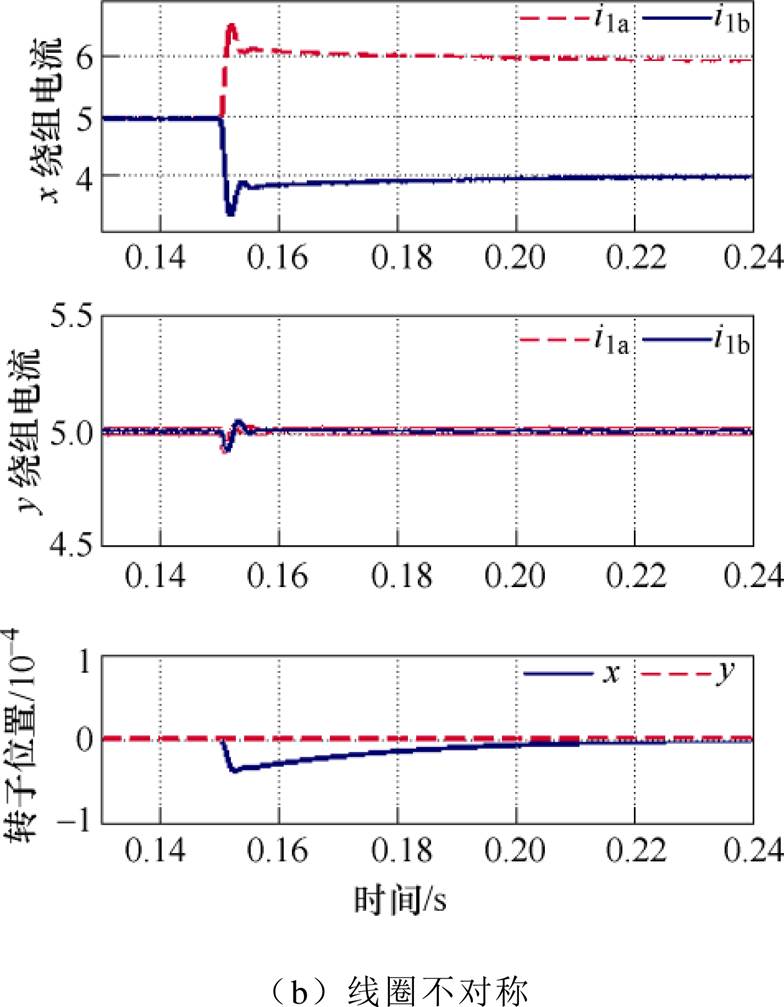
图14 电感不对称对位置控制的影响
Fig.14 The influence of inductance asymmetry on position control
为了进一步验证四相四桥臂控制器在磁轴承控制中的可行性,制作了一套可以应用四轴磁悬浮轴承的四相四桥臂控制器,实验平台与控制器样机如图15所示。图15a为四轴磁轴承实验平台,转子由两个径向磁轴承控制,并连接到一个高速电机上;图15b为控制器样机,该控制器由两套四相四桥臂控制器并联组成,共八个桥臂,每边四个桥臂可分别独立控制一个径向轴承,控制器上设有两个中心连接点。由于线圈的星形联结,实际控制中对于每个径向轴承的四个线圈,只需使用三个电流传感器即可完成四个线圈电流的采样,因此进一步节省了变换器成本。实验参数与仿真相同,见表1。
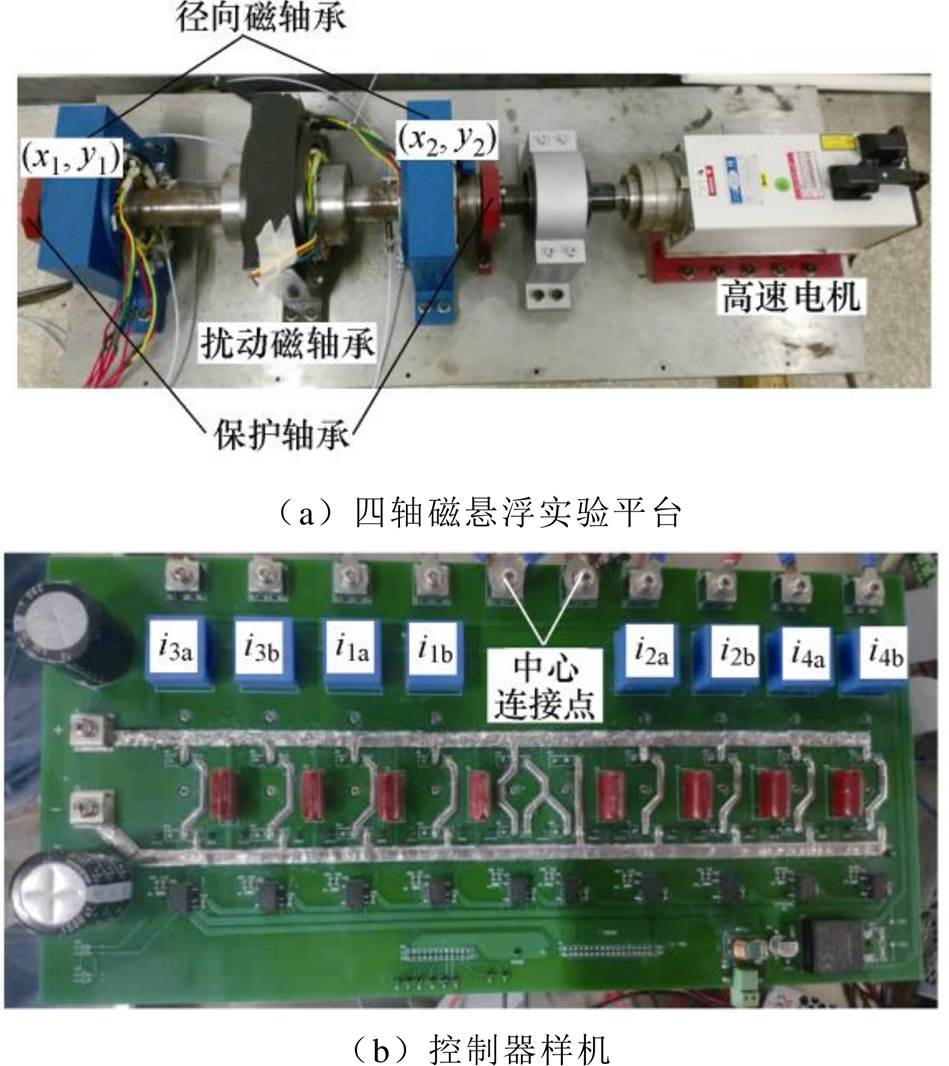
图15 实验平台与控制器样机
Fig.15 The photographs of test rig and prototype of the novel converter
首先进行了电流控制实验,实验结果如图16所示。实验中所有线圈电流在一开始都控制在3A。图16a为一组线圈施加1A差分电流,另一组线圈施加2A差分电流的实验结果;图16b为一组线圈施加幅值为1A,频率为100Hz的正弦差分电流,另一组线圈电流保持不变的实验结果。从电流控制结果来看,每个线圈电流都能很好地跟踪各自的电流指令,由于各线圈电感值有一些差别,电流控制的动态响应过程有所不同,但对实际的控制效果基本没有影响。图16c为使用小信号注入法扫频所得到的系统开环频率响应结果。由结果可得,系统的频率响应基本符合一个一阶线性系统,且系统的带宽约为760Hz,考虑系统采样延时等非理想参数后,与所设定的800Hz基本一致。由以上结果可得,四相四桥臂结构变化器电流控制能力符合理论分析,满足磁轴承系统中电流控制的需求。

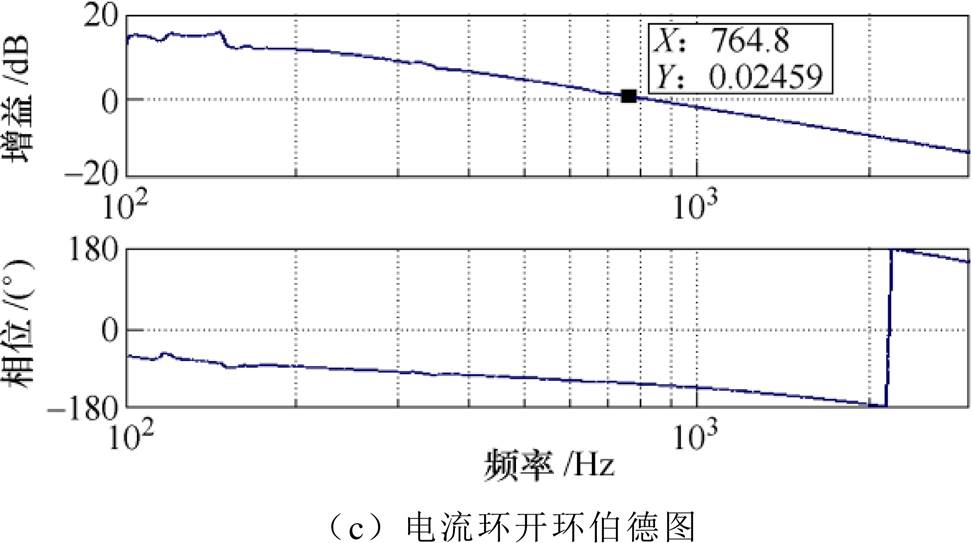
图16 电流控制实验结果
Fig.16 The experimental results of current control
在验证了该控制器的电流控制能力后,将控制器应用到四自由度磁悬浮轴承平台,进行位置控制实验,图17为位置控制实验结果。图17a为转子的起浮实验结果。最开始转轴落在两个保护轴承上,之后控制器开始工作,转子被电磁力悬浮起来,并被控制在轴承气隙的中点,在之后的静态悬浮中保持稳定;图17b为悬浮之后的旋转实验,最开始转子处于静态悬浮,然后高速电机牵引转子旋转,从0加速到3 000r/min,整个旋转过程中,转子处于稳定悬浮状态,并且位置误差始终小于±50mm,低于气隙长度的20%。起浮和旋转的位置控制实验,验证了新变换器在磁悬浮轴承控制中的可行性。

图17 位置控制实验结果
Fig.17 The experimental results of position control
本文提出一种应用于磁悬浮轴承控制的单极性四相桥臂电力电子变换器。该控制器基于不带永磁偏置的径向磁轴承上四个线圈电流的关系,仅用四个单向桥臂可实现对四个线圈电流的控制,做到了器件的最优化使用。分析了该控制器的工作模态、控制原理以及调制方式,实现了两组电流分别的差分控制,并采用相反的载波降低了输出电流的纹波。对该拓扑可能存在的电感不对称问题进行了稳态与动态分析,提出采用不对称PI控制器的解决方案,并对当线圈不对称不能完全补偿时对位置控制的影响进行分析。对控制器进行仿真以及实验验证,结果证明其满足磁悬浮轴承中对电流控制的需求,能实现磁悬浮轴承转子的位置控制,并且能有效地节省控制桥臂以及电流传感器,降低变换器的成本与体积,具有很好的实用价值。
参考文献
[1] Maslen E H, Schweitzer G, Bleuler H, et al. Magnetic bearings-theory, design, and application to rotating machinery[M]. Berlin: Springer, 2009.
[2] 张维煜, 朱熀秋, 袁野. 磁悬浮轴承应用发展及关键技术综述[J]. 电工技术学报, 2015, 30(12): 12-20.
Zhang Weiyuan, Zhu Huangqiu, Yuan Ye. Study on key technologies and applications of magnetic bearings[J]. Transactions of China Electrotechnical Society, 2015, 30(12): 12-20.
[3] 余志强, 孙晓云, 邱清泉, 等. 电机外置式径向型高温超导飞轮储能系统样机悬浮测试及旋转实验[J]. 电工技术学报, 2019, 34(10): 2166-2175.
Yu Zhiqiang, Sun Xiaoyun, Qiu Qingquan, et al. Levitation test and rotation experiment of radial-type superconducting flywheel energy storage system prototype with external motor[J]. Transactions of China Electrotechnical Society, 2019, 34(10): 2166-2175.
[4] 张涛, 刘欣凤, 莫丽红, 等. 磁悬浮高速电机系统建模与控制[J]. 电机与控制学报, 2018, 22(4): 98-104.
Zhang Tao, Liu Xinfeng, Mo Lihong, et al. Modeling and control of magnetic suspension high-speed motor[J]. Electric Machines and Control, 2018, 22(4): 98-104.
[5] 姜豪, 苏振中, 王东. 运动平台上磁轴承-转子系统的动力学建模[J]. 电工技术学报, 2019, 34(23): 4880-4889.
Jiang Hao, Su Zhenzhong, Wang Dong. Dynamic modeling of magnetic bearing-rotor system on moving platform[J]. Transactions of China Electrotechnical Society, 2019, 34(23): 4880-4889.
[6] 于洁, 祝长生, 余忠磊. 考虑涡流的自传感主动电磁轴承转子位置估计策略[J]. 电工技术学报, 2018, 33(9): 1946-1956.
Yu Jie, Zhu Changsheng, Yu Zhonglei. Self-sensing active magnetic bearing rotor position estimation strategy considering eddy current[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 1946- 1956.
[7] 周杰, 邓智泉, 李克翔, 等. 具有延时补偿的磁悬浮轴承开关功率放大器数字单周期控制[J]. 电工技术学报, 2018, 33(3): 652-661.
Zhou Jie, Deng Zhiquan, Li Kexiang, et al. Digital one-cycle control algorithm with compensation of time delay for switching power amplifier in magnetic suspension bearings[J]. Transactions of China Elec- trotechnical Society, 2018, 33(3): 652-661.
[8] 张广明, 陈淳, 梅磊, 等. 磁悬浮轴承功率放大器的发展现状与展望[J]. 微特电机, 2012, 40(3): 73-76.
Zhang Guangming, Chen Chun, Mei Lei, et al. The future and development of power amplifier for magnetic bearings[J]. Small & Special Electrical Machines, 2012, 40(3): 73-76.
[9] 李祥生. 多桥臂磁轴承开关功率放大器调制技术研究[D]. 南京: 南京航空航天大学, 2010.
[10] Carabelli S, Maddaleno F, Muzzarelli M. High- efficiency linear power amplifier for active magnetic bearings[J]. IEEE Transactions on Industrial Electro- nics, 2000, 47(1): 17-24.
[11] 赵旭升, 邓智泉, 王晓琳, 等. 永磁偏置磁轴承的研究现状及其发展[J]. 电工技术学报, 2009, 24(9): 9-20.
Zhao Xusheng, Deng Zhiquan, Wang Xiaolin, et al. Research status and development of permanent magnet biased magnetic bearings[J]. Transactions of China Electrotechnical Society, 2009, 24(9): 9-20.
[12] Wang Jun, Xu Longxiang. Analysis and modeling of a switching power amplifier for magnetic bearing[C]// 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, 2009: 2257-2261.
[13] 费清照, 邓智泉, 王晓琳, 等. 适用于磁悬浮轴承的新型五相六桥臂开关功放控制策略[J]. 中国电机工程学报, 2012, 32(9): 124-131.
Fei Qingzhao, Deng Zhiquan, Wang Xiaolin, et al. A control strategy of novel five-phase six-leg switching power amplifiers applied in magnetic levitating bearing systems[J]. Proceedings of the CSEE, 2012, 32(9): 124-131.
[14] 刘程子, 邓智泉, 曹鑫, 等. 一种新型的磁悬浮轴承五相六桥臂开关功率放大器控制策略[J]. 电工技术学报, 2016, 31(9): 112-119.
Liu Chengzi, Deng Zhiquan, Cao Xin, et al. A novel control of five-phase six-leg switching power amplifier in magnetic levitating bearing system[J]. Transactions of China Electrotechnical Society, 2016, 31(9): 112-119.
[15] Jiang Dong, Kshirsagar P. Analysis and control of a novel power electronics converter for active magnetic bearing drive[J]. IEEE Transactions on Industry Applications, 2017, 53(3): 2222-2232.
[16] Hu Zaidong, Jiang Dong, Han Xun, et al. A common- leg power electronics converter for multi-axis active magnetic bearing drive[C]//In Proceedings of the 16th International Symposium on Magnetic Bearings, Beijing, China, 2018: 605-611.
[17] Jiang Dong, Li Tian, Hu Zaidong, et al. Novel topologies of power electronics converter as active magnetic bearing drive[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2): 950-959.
[18] Bühler P, Siegwart R, Herzog R. Digital control for low cost industrial AMB applications[C]//Proceedings 5th International Symposium on Magnetic Bearings, Kanazawa, Japan, 1996: 83-88.
[19] Reto Schöb, Christian Redemann, Thomas Gempp. Radial active magnetic bearing for operation with 3-phase power converter[C]//Proceedings 4th Inter- national Symposium on Magnetic Suspension Tech- nology, Gifu, Japan, 1997: 1-13.
[20] 陈昊, 谢桂林, 张超. 开关磁阻电机功率变换器主电路研究[J]. 电力电子技术, 2000(3): 22-25.
Chen Hao, Xie Guilin, Zhang Chao. Research on power converter main circuit for switched reluctance machine[J]. Power Electronics, 2000(3): 22-25.
[21] 吴玉飞, 刘闯, 张磊. 四相无电容裂相式开关磁阻电机的调速控制[J]. 电机技术, 2012(2): 14-17.
Wu Yufei, Liu Chuang, Zhang Lei. Speed-control of the 4-phase switched reluctance motor by split-phase converter but without capacitor connected[J]. Elec- trical Machinery Technology, 2012(2): 14-17.
A Four-Phase Four-Leg Power Electronics Converter for Active Magnetic Bearing Drive
Abstract Power amplifier is a key component in active magnetic bearing (AMB) system. Based on the relationship of four winding-currents in the 8-pole radial bearing, this paper analyzes the feasibility of a four-phase four-leg power electronic converter. The common phase-leg used in some topologies of AMB drive has been removed in the proposed novel topology. Only four phase-legs are required to control four winding-currents, which realizes the optimal use of the device and reduces the cost and converter volume. Moreover, the control principle and modulation mode of the novel converter have been analyzed. The two sets of winding current control adopt the opposite carrier to reduce the winding current ripple. According to the influence analysis of inductance asymmetry on current control, a solution was proposed using PI controllers with different parameters. Meanwhile, the influence on position control was further analyzed when the inductance asymmetry cannot be fully compensated. The simulations were carried out, and the established prototype was tested on a four-axis AMB test rig. The results show that the topology can meet the control requirements in AMB drive, and can effectively reduce the cost and volume of the converter.
keywords:Magnetic bearing, power electronics converter, current differential control, four-phase four-leg
中图分类号:TM46
DOI: 10.19595/j.cnki.1000-6753.tces.190912
国家自然科学基金面上资助项目(51877091)。
收稿日期2019-07-19
改稿日期 2020-03-11
胡载东 男,1995年生,硕士研究生,研究方向为磁悬浮轴承驱动及控制。E-mail: zdhu@hust.edu.cn
蒋 栋 男,1983年生,教授,博士生导师,研究方向为电力电子与电力传动。E-mail: jiangd@hust.edu.cn(通信作者)
(编辑 崔文静)