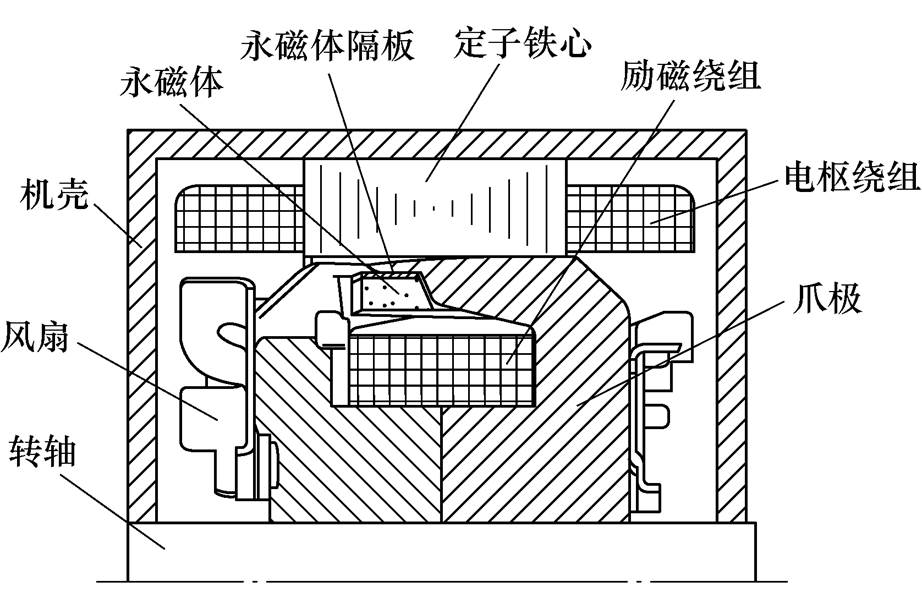
图1 电机的结构
Fig.1 Structure of the motor
摘要 针对爪极混合励磁皮带驱动起动/发电一体机(BSG)初始设计方案中气隙磁通密度低、磁场调节范围窄、发电性能和低速输出性能较差等问题,该文对BSG电机进行了优化设计。首先介绍该电机的结构特点和磁场调节原理;然后结合三维有限元仿真,对永磁体厚度、气隙大小、定子槽口宽度进行了优化,并对优化前后的电机进行性能对比,优化后的结构具有磁通密度高、波形品质佳、发电性能好和起动转矩大的特点;最后制造样机并进行相关实验。样机实验与有限元分析结果吻合,验证了有限元仿真计算的准确性,进一步证明了分析的正确性。
关键词:混合励磁 爪极电机 皮带驱动起动/发电一体机(BSG)系统 磁场调节
在全球环境问题和能源危机的背景下,对汽车的油耗提出严格要求[1]。皮带驱动起动/发电一体机(Belt-driven Starter Generator, BSG)的混合动力技术凭借其对原有汽车改动最小、成本最低、最易批量化生产、节能减排等优点具有很好的应用前景[2]。
早期的BSG有采用电励磁爪极同步电机和永磁爪极同步电机。虽然电励磁爪极同步电机结构简单,通过调节励磁电流就可以方便地调节气隙磁场,但因其存在电刷-集电环结构,可靠性低,且其极间漏磁大、功率密度小、励磁损耗大、电机效率低[3-4]。永磁爪极同步电机虽然舍弃了容易出问题的集电环和电刷装置,体积小、功率密度高[5],但其气隙磁场调节非常困难[6-7]。爪极混合励磁同步电机综合了两者的优点,又克服了各自的缺点,已成为BSG的主流。针对爪极混合励磁同步电机的研究,学者们提出了多种不同的电机结构,区别在于永磁体和励磁绕组的放置方式,以及是否存在电刷。但其气隙磁场均由励磁电流和永磁体共同产生,通过调节励磁电流调节气隙磁通密度[8-15]。
爪极混合励磁同步电机可分为串联式和并联式。串联式有较硬的外特性,但由于永磁体磁阻大,磁场调节所需的励磁电流大,可能导致永磁体出现不可逆退磁[16-18]。并联式在转子爪极之间加入了一块切向充磁的永磁体,以增加电机的主磁通和减少爪极之间的漏磁。但由于永磁体的加入,造成了一对极下磁场的偏斜,使得永磁体的利用率降低,电机的气隙磁通密度偏低,体积质量较大[19-20]。
为了改善上述各种电机存在的缺陷与不足,本文设计了一种爪极混合励磁BSG。首先计算了电机的磁场分布特征和磁场调节特性;然后分析了永磁体厚度对磁场调节的影响规律,并从气隙大小、定子槽口宽度等角度入手,比较了这些参数对反电动势(Electromotive Force, EMF)的影响;最终将三维有限元仿真结果和样机的实验进行对比,验证优化后的结构提高了气隙磁通密度,改善了输出电压的波形品质,发电性能好,增大了起动转矩。
本文所研究的爪极混合励磁BSG结构如图1所示,由转轴、风扇、机壳、永磁体、永磁体隔板、定子铁心、励磁绕组、电枢绕组和爪极构成。定子采用两套三相三角形联结绕组,位置互差30°电角度,以传递更大的功率,具有更高的可靠性。转子由两个爪极组成,在爪极间隙上放置切向充磁的永磁体,永磁体和爪极间设有隔板,以减少漏磁通。在爪极轭部设有励磁绕组。机壳和风扇由非导磁材料制成,分别为电机提供支撑和散热。
爪极混合励磁BSG的空载气隙磁场由永磁体和励磁绕组共同提供,二者为并联关系,其中,永磁体起辅助增磁作用。
图1 电机的结构
Fig.1 Structure of the motor
当励磁电流为零时,磁场仅由永磁体产生。磁通一部分通过爪极、转子极轭闭合;另一部分通过气隙与定子交链,此时气隙磁通密度较小。
当励磁绕组通电时,电机磁路分为永磁磁路与电励磁磁路两部分,二者为并联关系。永磁磁路为:永磁体(N极)→爪极→气隙→定子齿→定子轭→定子齿→气隙→爪极→永磁体(S极)。电励磁磁路为:爪极轭部→爪极→气隙→定子齿→定子轭→定子齿→气隙→爪极→爪极轭部。气隙磁场随着励磁电流的增大而增大,实现了并联混合励磁,通过调节励磁电流,便可对磁场进行有效的调节。
爪极混合励磁BSG由于其结构的特殊性,电磁关系较为复杂,目前较为直接的研究方法是采用有限元方法。根据BSG的结构特点,建立等效1/6简化模型进行研究,具体模型如图2所示。表1和表2分别为BSG的性能指标要求和初始设计参数。
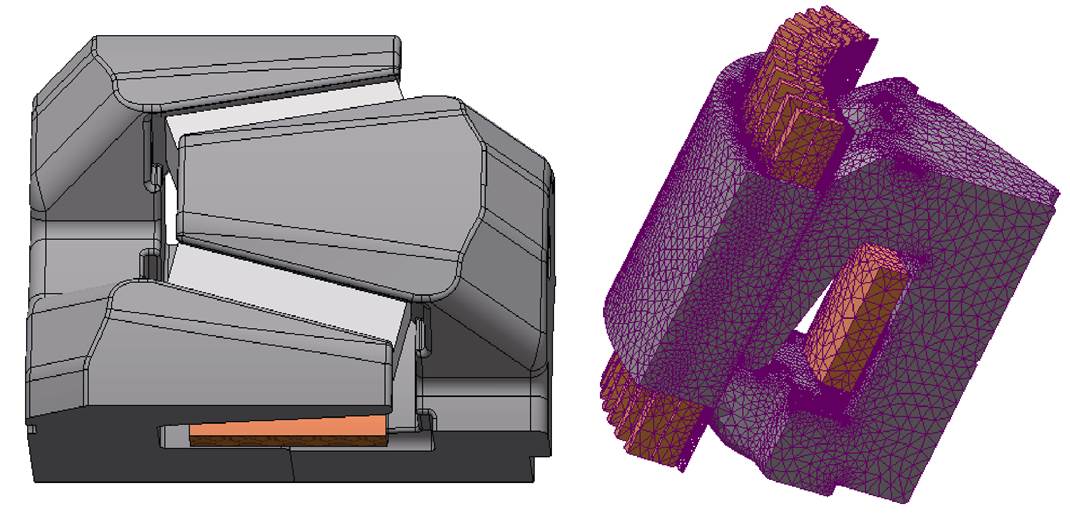
图2 BSG的1/6模型
Fig.2 Sixth model of the BSG
图3为爪极混合励磁BSG经有限元仿真,在额定状态下的磁通密度云图。定子齿磁通密度为1.75T,定子轭磁通密度为1.29T,爪极磁通密度为0.92T,转子轭磁通密度为0.74T。可以看出,电机磁场不存在饱和的现象,设计是比较合理的。
表1 BSG的性能指标要求
Tab.1 Performance requirements of the BSG
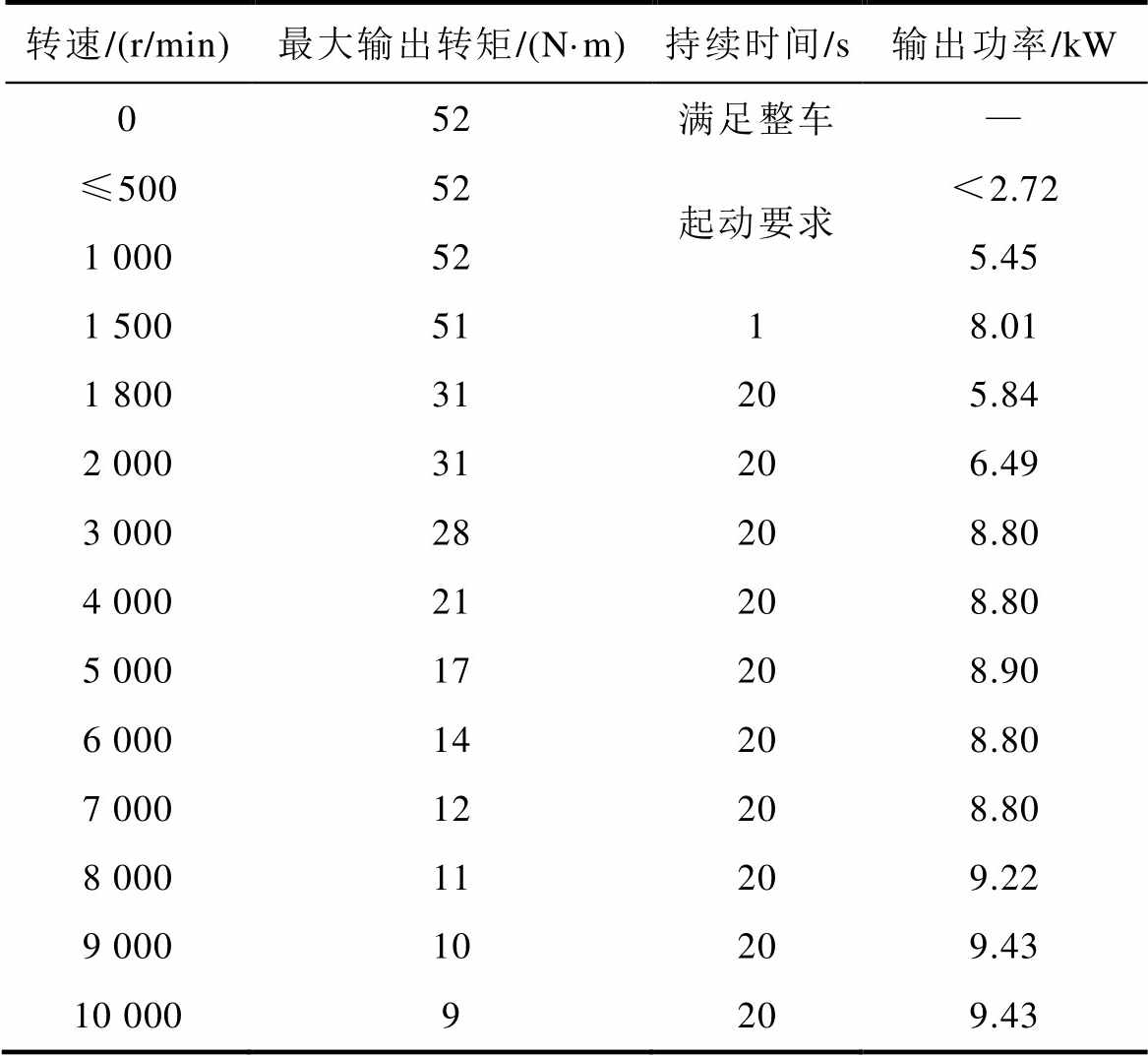
转速/(r/min)最大输出转矩/(N·m)持续时间/s输出功率/kW 052满足整车— ≤50052起动要求<2.72 1 000525.45 1 5005118.01 1 80031205.84 2 00031206.49 3 00028208.80 4 00021208.80 5 00017208.90 6 00014208.80 7 00012208.80 8 00011209.22 9 00010209.43 10 0009209.43
表2 BSG的初始设计参数
Tab.2 Initial design parameters of the BSG
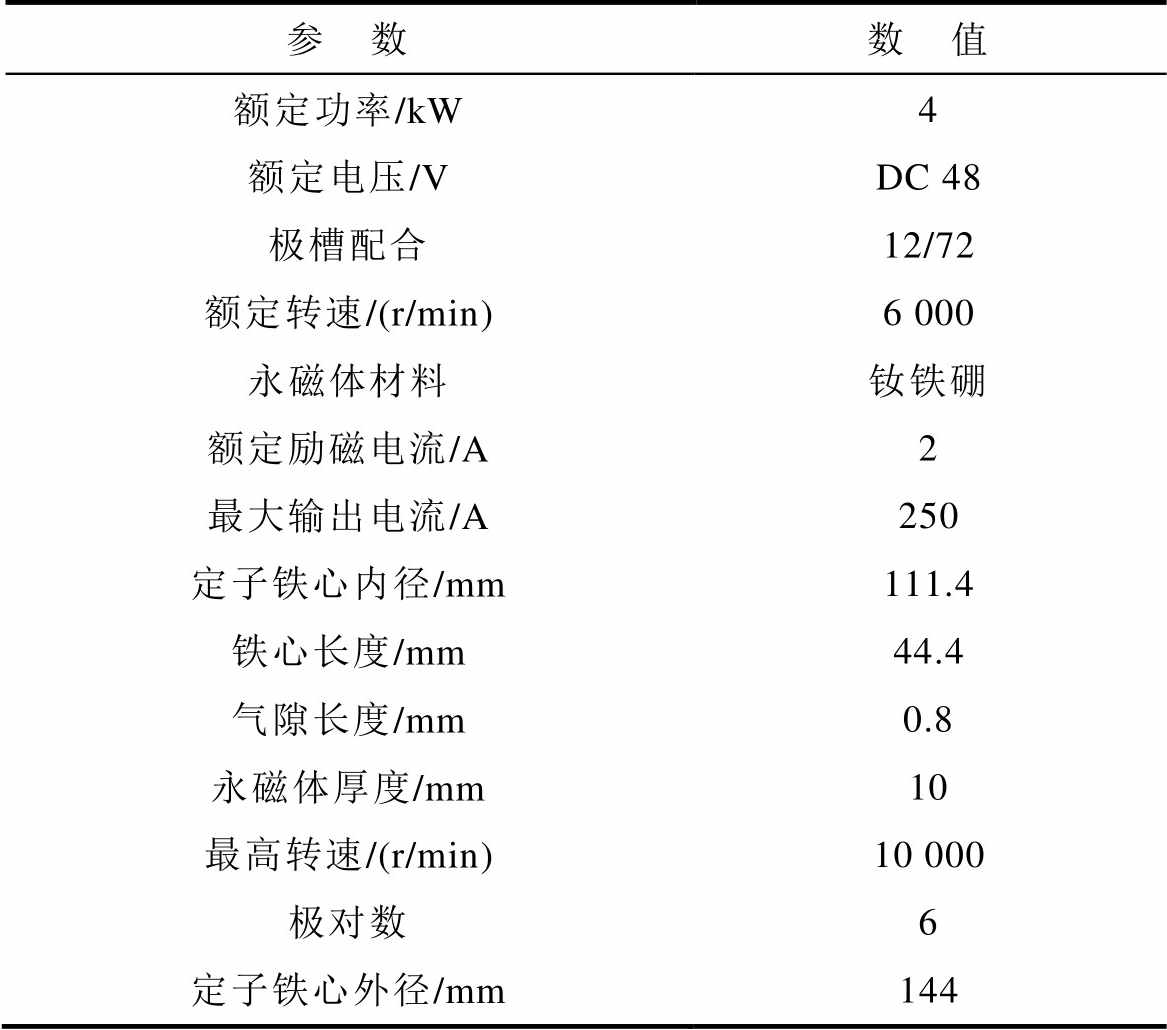
参 数数 值 额定功率/kW4 额定电压/VDC 48 极槽配合12/72 额定转速/(r/min)6 000 永磁体材料钕铁硼 额定励磁电流/A2 最大输出电流/A250 定子铁心内径/mm111.4 铁心长度/mm44.4 气隙长度/mm0.8 永磁体厚度/mm10 最高转速/(r/min)10 000 极对数6 定子铁心外径/mm144

图3 BSG在额定状态下的磁通密度云图
Fig.3 Magnetic dense cloud diagram of the BSG under rated conditions
图4为爪极混合励磁BSG的磁场调节特性,由于电机的气隙磁通密度分布不均匀,本文给出的是电机的气隙磁通密度基波最大值。当励磁电流为零时,气隙磁通较小,为0.14T,可以实现自励;随着励磁电流的提高,电励磁磁动势迫使永磁体产生的磁通经过气隙与定子交链,永磁体的辅助增磁作用变的明显,气隙磁通密度呈线性增加且增幅较大;当励磁电流等于2A时,气隙磁通密度达到饱和状态,为1.2T;此后,随着励磁电流的增加,气隙磁通密度的增幅不大。
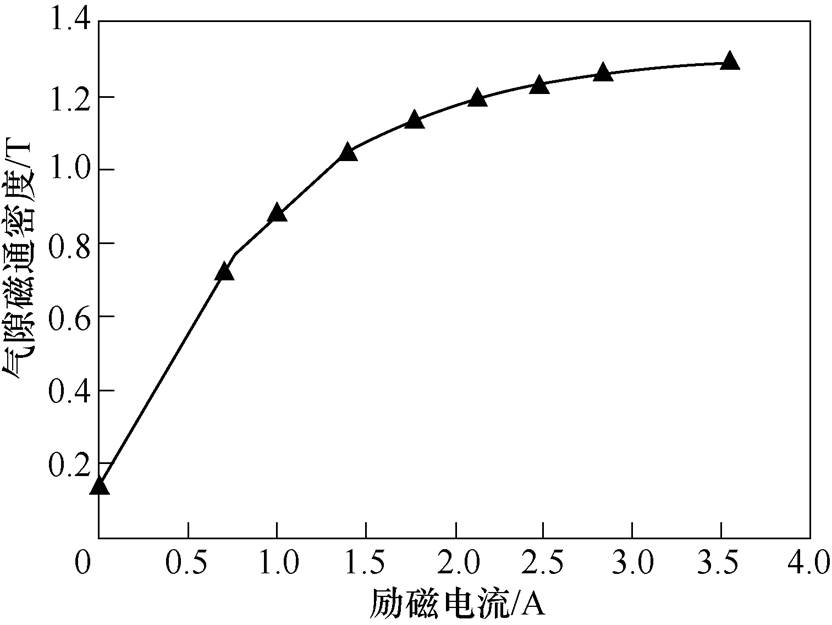
图4 BSG的磁场调节特性
Fig.4 Magnetic field adjustment characteristics of the BSG
针对现有爪极混合励磁BSG设计方案中气隙磁通密度低、永磁体利用率较低、发电性能较差等问题,下文结合三维有限元方法,分别分析了永磁体厚度的变化对气隙磁场调节的影响,以及气隙大小、定子槽口宽度对反电动势的影响;并且对永磁体厚度、气隙大小、定子槽口宽度进行优化,以满足爪极混合励磁BSG的技术要求。
2.1.1 永磁体厚度分析
永磁体厚度即永磁体磁化方向长度。在其他设计参数不变的条件下,本文分析了永磁体厚度对气隙磁场调节特性的影响。
永磁体厚度对磁场调节特性的影响如图5所示,当励磁电流为零时,随着永磁体厚度的增加,气隙磁通密度增大,但幅值均较小。永磁体厚度为2.4mm时的气隙磁通密度为0.03T,永磁体厚度为10.0mm时的气隙磁通密度为0.14T。随着励磁电流的增加,不同永磁体厚度所对应的气隙磁通密度均迅速增大,且增幅相近。永磁体厚度较小的气隙磁通密度先达到饱和状态,幅值为1.03T。永磁体厚度较大的气隙磁通密度后达到饱和状态,幅值为1.22T。
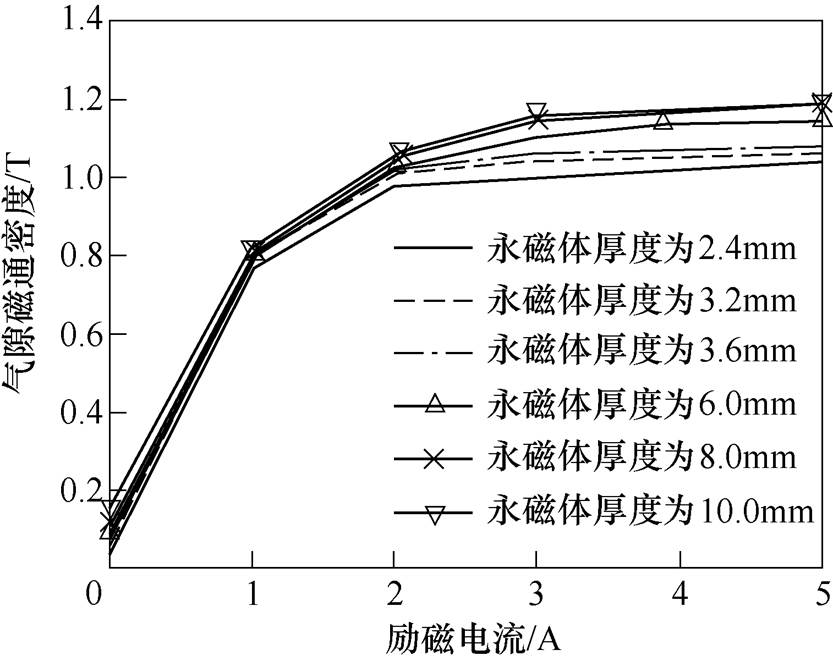
图5 永磁体厚度对磁场调节特性的影响
Fig.5 Effect of permanent magnet thickness on the magnetic field adjustment characteristics
对于不同厚度的永磁体,增大励磁电流均能有效地增大气隙磁通密度。在相同励磁电流下,增大永磁体厚度,虽然能提高电机的气隙磁通密度,但随着永磁体厚度的增加,漏磁系数也会增大,限制了电机气隙磁通密度的大幅提高,并且永磁体厚度的增加使得电机的制造成本增加。当永磁体过薄时,辅助增磁效果不明显,还会导致生产时废品率上升且容易退磁。从图5可知,当永磁体厚度小于6.0mm时,气隙饱和较快且气隙磁通密度较低,当永磁体厚度大于6.0mm时,虽然气隙磁通密度有所提升但效果不明显。所以最终将永磁体厚度选为6.0mm,相比于表2的初始设计,气隙磁通密度仅减少了4.5%,但是永磁体材料却节约了40%。
2.1.2 气隙长度分析
电枢绕组的相电动势可以表示为
 (1)
(1)式中, 为气隙磁场的波形系数;
为气隙磁场的波形系数; 为电流频率;
为电流频率; 为电枢绕组的每相串联匝数;
为电枢绕组的每相串联匝数; 为电枢的绕组系数;
为电枢的绕组系数; 为每极磁通;
为每极磁通; 为气隙磁通密度的最大值;
为气隙磁通密度的最大值; 为计算极弧系数;
为计算极弧系数; 为电枢的计算长度;
为电枢的计算长度; 为极距。可知,电机的反电动势与气隙基波磁通密度以及电机转速成正比,在同一转速下,反电动势的变化反映了电机磁场的变化。
为极距。可知,电机的反电动势与气隙基波磁通密度以及电机转速成正比,在同一转速下,反电动势的变化反映了电机磁场的变化。
图6是对永磁体厚度优化后,气隙长度分别为0.4mm、0.6mm、0.8mm,转速为1 000r/min时对应的反电动势波形及其谐波分析。可以看出,随着气隙的减小,平均气隙磁导和齿谐波磁导均增大,漏磁减小。导致反电动势的幅值及电压波形畸变率增大。为了提高气隙磁通密度,改善输出特性,并且保证电压波形畸变率不超过8%,气隙最低长度不小于0.3mm,以免发生转子扫膛等问题。最终将气隙选为0.4mm,电压由7.07V升到9.19V,增加了23%,但是谐波畸变率也由5.6%增加到7.6%,增加了35%。

图6 气隙对反电动势的影响
Fig.6 Effect of air gaps on back EMF
2.1.3 定子槽口宽度分析
在实际的电机中,气隙中的磁场并非正弦波,除了基波以外,还存在一系列谐波。若高次谐波电动势较大,会使电机本身的杂散损耗增大,温升增高,效率降低。由于定子开槽,使气隙不均匀,气隙中出现和基波绕组系数一样的齿谐波。在前文优化后的基础上,分析了槽口宽度b0与反电动势的关系如图7所示。由图7可知,定子槽口宽度对反电动势的幅值影响不大,主要影响反电动势中的谐波含量。当定子槽口宽度为零时,即采用闭口槽或磁性槽楔,可减少电机齿谐波,但漏磁系数有所增加,此时的谐波畸变率为5.45%。当槽口宽度较小(0~0.5mm)时,可以等效成闭口槽。随着槽口宽度的增加(0.5~1.0mm),平均气隙磁导减小而齿谐波磁导增大,导致反电动势下降(但下降程度较小),电压波形畸变率增大,波形正弦性变差。槽口宽度为1.0mm时的波形畸变率为7.5%。随着槽口宽度的继续增大(1.0~2.5mm),电压波形畸变率增幅很小,保持在7.8%左右。由于受到机械结构的限制,槽口宽度不可无限增大,否则会导致噪声振动等问题。优化后的槽口宽度为0.5mm,此时谐波畸变率为5%。

图7 槽口宽度对反电动势的影响
Fig.7 Effect of notch widths on back EMF
表3为优化前后的电机参数对比,优化后的样机反电动势提高了12.5%,总谐波畸变率(Total Harmonic Distortion, THD)降低了10.7%,在相同的电枢电流下,平均转矩提升了12%,起动转矩提高了6.1%,效率提高了4.3%,优化后电机的性能得到了提升。
表3 优化前后的电机参数对比
Tab.3 Comparisons of motor parameters before and after optimization
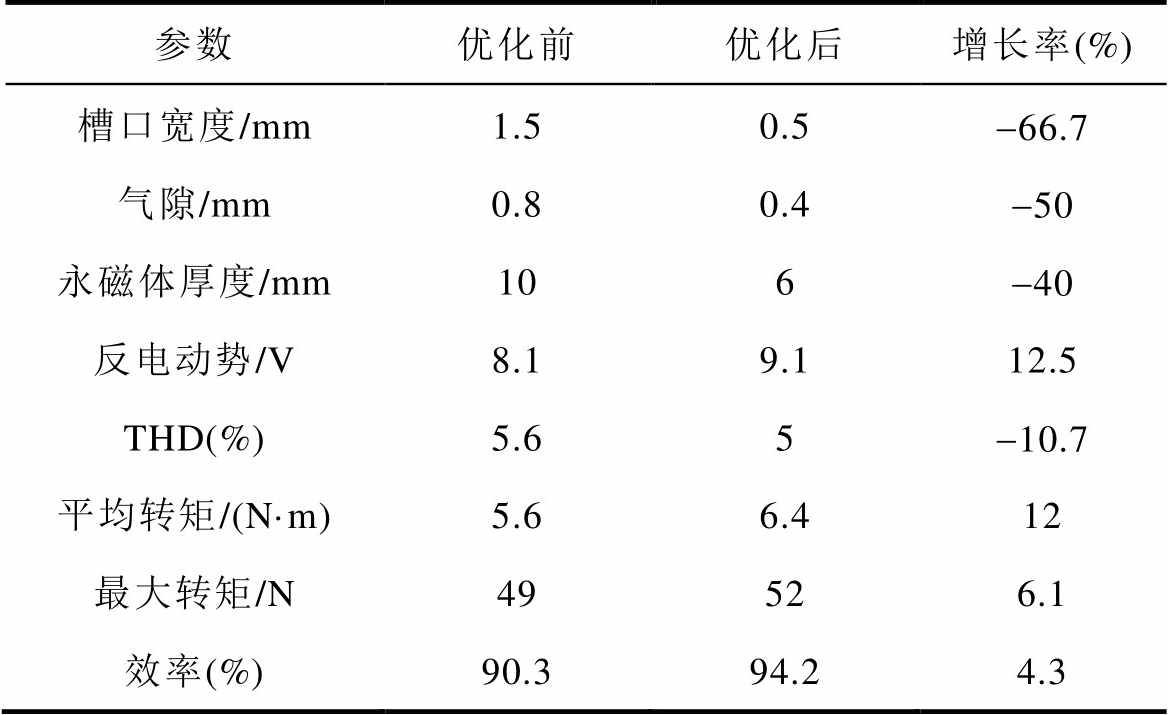
参数优化前优化后增长率(%) 槽口宽度/mm1.50.5-66.7 气隙/mm0.80.4-50 永磁体厚度/mm106-40 反电动势/V8.19.112.5 THD(%)5.65-10.7 平均转矩/(N·m)5.66.412 最大转矩/N49526.1 效率(%)90.394.24.3
图8为BSG的外特性曲线。与表1 BSG的性能指标要求相比,在电机起动阶段,电枢电流和励磁电流保持在了最大值,分别为250A和5.5A;最大转矩为52N,且恒转矩输出。虽然此时电枢绕组的电流密度很高为45.35A/mm2,效率比较低,但是起动时间很短,依然可以满足电机需求。在助力阶段,电机处于恒功率状态,随着电机转速的提高,输出转矩降低,励磁电流从最大值开始降低,电枢电流保持在最大值。直到转速到4 000r/min以后,励磁电流保持在额定值2A,电枢电流逐渐降低。从以上分析可知,优化后的电机满足汽车的起动助力要求。
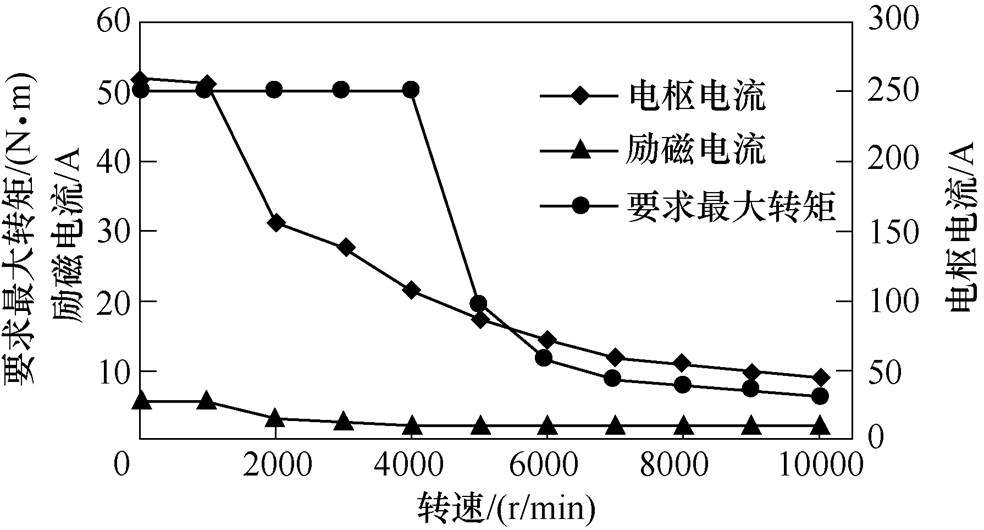
图8 BSG的外特性曲线
Fig.8 External characteristics curves of the BSG
为了验证仿真计算的准确性,按照优化后的电机参数,制造了一台爪极混合励磁BSG的样机,如图9所示。并搭建了电机实验平台,如图10所示。实验分为发电状态实验和电动状态实验。
图11为转速为1 000r/min时,施加不同的励磁电流,空载反电动势仿真结果与实验结果的对比。由于仿真计算过程中对电机做了简化和等效替代,设置过于理想化,为了便于电机装配,样机所用永磁体是经过磨削的,所以实际测得的空载反电动势偏低,但曲线的趋势是保持一致的。空载反电动势随着励磁电流的增加而逐渐增加,当励磁电流达到2A时,空载反电动势增加趋于稳定。
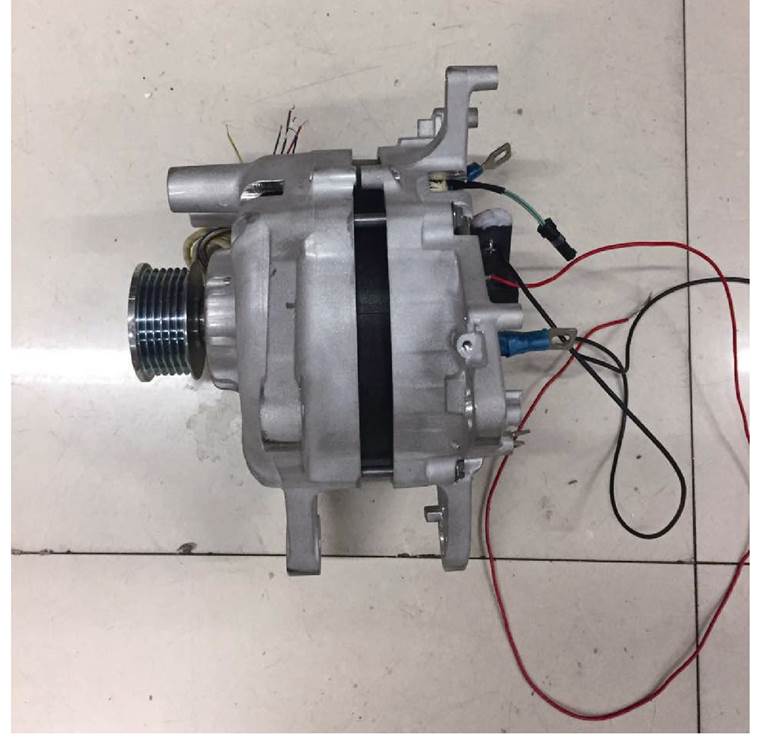
图9 爪极混合励磁BSG样机
Fig.9 Claw pole hybrid excitation BSG prototype
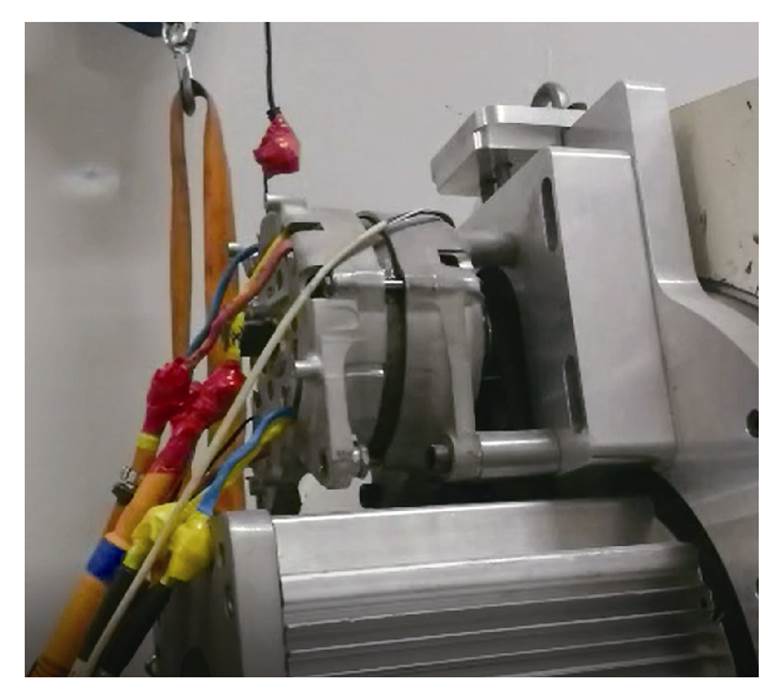
图10 实验平台
Fig.10 Test platform

图11 空载反电动势随励磁电流变化曲线(1 000r/min)
Fig.11 Curves of no-load back EMF with excitation current (1 000r/min)
图12为不同转速下,最大转矩仿真结果与实验结果的对比,从图中可以看出,实验测得的最大转矩数值略小于仿真数据,但误差很小,基本吻合。
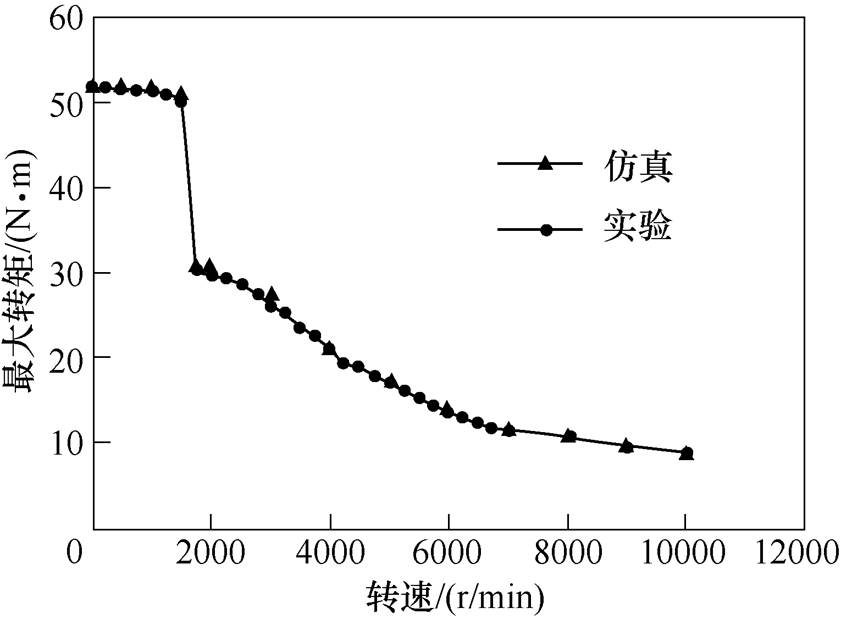
图12 最大转矩曲线
Fig.12 Curves of maximum torque
上述实验虽然测量结果与仿真结果有一定的误差,但仿真结果与实验结果是基本吻合的,验证了仿真计算的准确性,进一步证明了优化方案的正确性。
本文对一种爪极混合励磁BSG的磁场进行设计研究,介绍了该电机的结构特点和磁场调节原理,结合三维有限元方法,从永磁体厚度、气隙大小、定子槽口宽度三个方面分析了各自对磁场的影响,并对其进行优化,通过样机实验,验证了计算方法的合理性和有效性,得到以下结论:
1)在相同励磁电流下,永磁体厚度的设计存在最优值。如果永磁体厚度过小,则永磁体的增磁效果不明显;如果永磁体厚度过大,虽然能提高电机的气隙磁通密度,但漏磁系数也会增大,从而限制了电机气隙磁通密度的大幅提高,永磁体的材料利用率不高。
2)随着气隙的减小,漏磁减小,平均气隙磁导和齿谐波磁导均增大,反电动势的幅值及其电压波形畸变率增大,波形正弦性变差。
3)槽口宽度主要影响反电动势的电压波形畸变率,而对其幅值影响较小。随着槽口宽度的增加,电压波形畸变率逐渐增大最终趋于稳定。
4)优化设计方案合理,且优化后的结构具有磁通密度高、波形品质佳、发电性能好和起动转矩大等特点。
参考文献
[1] 于占波. 工信部: 解读《中国制造2025》规划系列之推动节能与新能源汽车发展[J]. 商用汽车, 2015(6): 23-26.
Yu Zhanbo. Ministry of industry and information technology: interpretation of the “Made in China 2025” planning series promoting energy saving and new energy vehicle development[J]. Commercial Vehicles, 2015(6): 23-26.
[2] 《实用汽车技术》编辑部. 节能减排的BSG系统——有关BSG系统问答[J]. 实用汽车技术, 2010(1): 4-5.
Editorial Department of Practical Automotive Techno- logy. BSG system for energy saving and emission reduction—question and answer on BSG system[J]. Practical Automotive Technology, 2010(1): 4-5.
[3] Kaehler C, Henneberger G. Eddy-current computation in the claws of a synchronous claw-pole alternator in generator mode[J]. IEEE Transactions on Magnetics, 2002, 38(2): 1201-1204.
[4] Kaehler C, Henneberger G. Transient 3-D FEM com- putation of eddy-current losses in the rotor of a claw- pole alternator[J]. IEEE Transactions on Magnetics, 2004, 40(2): 1362-1365.
[5] 唐任远. 现代永磁电机[M]. 北京: 机械工业出版社, 1997.
[6] Cros J, Viarouge P. New structures of polyphase claw-pole machines[J]. IEEE Transactions on Industry Applications, 2004, 40(1): 113-120.
[7] Bai Hua, Pekarek S, Techenor J, et al. Analytical derivation of a coupled-circuit model of a claw-pole alternator with concentrated stator winding[C]//IEEE Power Engineering Society Winter Meeting, New York, USA, 2002: 1236-1240.
[8] 李馨. 弱混合动力汽车新型混合励磁BSG电机研究[D]. 武汉: 湖北工业大学, 2014.
[9] Tapia J A, Leonardi F, Lipo T A. Consequent-pole permanent-magnet machine with extended field- weakening capability[J]. IEEE Transactions on Industry Applications, 2001, 39(6): 1704-1709.
[10] Aydin M, Huang Surong, Lipo T A. A new axial flux surface mounted permanent magnet machine capable of field control[C]//Conference Record of the 2002 IEEE Industry Applications Conference, 37th IAS Annual Meeting, Pittsburgh, PA, USA, 2002: 1250- 1257.
[11] Aydin M, Huang Surong, Lipo T A. Performance evalu- ation of an axial flux consequent pole PM motor using finite element analysis[C]//IEEE Inter- national Electric Machines and Drives Conference, Madison, WI, USA, 2003: 1682-1687.
[12] 张宏杰, 唐任远. 混合励磁永磁同步发电机的原理与设计[J]. 电工电能新技术, 2002, 21(1): 29-32.
Zhang Hongjie, Tang Renyuan. Principle and design of hybrid excitation permanent magnet synchronous generator[J]. Advanced Technology of Electrical Engineering and Energy, 2002, 21(1): 29-32.
[13] 杨成峰, 林鹤云, 刘细平. 新型非对称交错混合励磁同步电机电磁设计[J]. 中国电机工程学报, 2008, 28(24): 82-87.
Yang Chengfeng, Lin Heyun, Liu Xiping. Electro- magnetic design of a novel asymmetric interleaved hybrid excitation synchronous machine[J]. Pro- ceedings of the CSEE, 2008, 28(24): 82-87.
[14] 王秀和, 乔东伟, 朱常青. 新型混合励磁无刷爪极发电机磁场调节特性的有限元分析[J]. 电机与控制学报, 2013, 17(7): 99-104.
Wang Xiuhe, Qiao Dongwei, Zhu Changqing. Finite element analysis of magnetic field regulation characteristics of a novel hybrid excitation brushless claw-pole generator[J]. Journal of Electric Machinery and Control, 2013, 17(7): 99-104.
[15] 乔东伟, 王秀和, 朱常青. 新型混合励磁无刷爪极发电机的磁场调节特性分析及试验研究[J]. 中国电机工程学报, 2013, 33(9): 115-121.
Qiao Dongwei, Wang Xiuhe, Zhu Changqing. Analysis and experimental study on magnetic field regulation characteristics of a novel hybrid excitation brushless claw-pole generator[J]. Proceedings of the CSEE, 2013, 33(9): 115-121.
[16] Giles K, Bryson K M, Weng Qin. Comparison of two families of entropy-based classification measures with and without feature selection[C]//Hawaii Inter- national Conference on System Sciences, Maui, HI, USA, 2001: 1-10.
[17] 赵朝会. 串联磁路混合励磁爪极发电机的结构设计和特性[J]. 电工技术学报, 2009, 24(5): 1-6.
Zhao Chaohui. Structural design and characteristics of a hybrid excitation claw-pole generator with series magnetic circuits[J]. Transactions of China Electro- technical Society, 2009, 24(5): 1-6.
[18] Zhang Da, Zhao Chaohui, Zhu Lei, et al. On hybrid excitation claw-pole synchronous generator with magnetic circuit series connection[C]//International Conference on Electrical Machines and Systems, Wuhan, China, 2008: 3509-3513.
[19] 王群京, 李国丽, 马飞, 等. 具有永磁励磁的混合式爪极发电机空载磁场分析和电感计算[J]. 电工技术学报, 2002, 17(5): 1-5.
Wang Qunjing, Li Guoli, Ma Fei, et al. Analysis of no-load magnetic field and inductance calculation of hybrid claw-pole generator with permanent magnet excitation[J]. Transactions of China Electrotechnical Society, 2002, 17(5): 1-5.
[20] 王群京, 马飞, 李国丽, 等. 爪极电机空载时三维磁场的数值分析和电感计算[J]. 中国电机工程学报, 2002, 22(1): 39-43.
Wang Qunjing, Ma Fei, Li Guoli, et al. Numerical analysis and inductance calculation of 3D magnetic field of claw pole motor under no-load[J]. Pro- ceedings of the CSEE, 2002, 22(1): 39-43.
Magnetic Field Design of Claw-Pole Hybrid Excitation Belt-Driven Starter Generator
Abstract The current design of claw-pole hybrid excitation BSG motor has the problems of low air gap flux density, narrow magnetic field adjustment range, poor power generation performance and low speed output performance. This paper has optimized the design of the motor. Firstly, the structural characteristics and magnetic field adjustment principle of the motor are introduced. A type of three-dimensional finite element method is then applied to optimize the thickness of the permanent magnet, the size of the air gap and the width of the stator slot. Compared with the performance of previous motors, the structure of the optimized motor in this paper has the characteristics of high flux density, good waveform quality, good power generation performance and large starting torque. Furthermore, the prototype test was designed and manufactured. The test results are consistent with the results of finite element analysis, which verifies the accuracy of the finite element simulation.
keywords:Hybrid excitation, claw pole motor, belt-driven starter generator (BSG) system, magnetic field adjustment
中图分类号:TM315
DOI: 10.19595/j.cnki.1000-6753.tces.191198
收稿日期2019-09-18
改稿日期 2020-01-06
王晓远 男,1962年生,博士,教授,博士生导师,研究方向为电机电磁场的分析与计算。E-mail: xywang62@tju.edu.cn(通信作者)
李 娜 女,1994年生,硕士研究生,研究方向为永磁同步电机电磁计算。E-mail: lina0108@tju.edu.cn
(编辑 崔文静)