 (1)
(1)摘要 储能系统是微电网的核心组成部分,其热管理对于微电网的安全与稳定具有重要意义。相对于表面温度,电池堆内部温度场更有意义,针对红外热像仪无法监测电池堆内部温度场的问题,提出一种基于表面温度场与虚拟热源的三维温度场重构方法。通过分割算法将有效区域分离,利用定标将其映射为表面温度场,进而初步重构三维温度场,然后以虚拟热源对立体子单元温度进行修正。为了避免电池堆红外图像有效区域分割不准确对三维重构造成的影响,对马尔可夫随机场约束下的模糊核C均值聚类(MRF-KFCM)算法进行改进,通过Otsu算法在可见光图像中初步获得有效区域,赋予像元以不同的目标信息权重进行聚类,最后经配准得到电池堆在红外图像中的准确位置。实验结果表明,该方法能够反映电池堆内部温度变化趋势和局部差异,精度满足实际应用需求。
关键词:储能系统热管理 三维温度场重构 MRF-KFCM 先验框目标信息 辐射定标
微电网是电力网络由传统集中式供电向分布智能化供电转型的主要手段,是支撑未来智能电网和能源互联网发展的关键技术[1-3]。储能系统作为微电网实现稳态运行和能量管理的核心与载体,具有削峰填谷、调压调频、应急备用等功能[4-6]。温度监测是储能系统进行热量管理和安全保护的一项重要依据,目前常用的手段多为接触式测温,只能反映电池的单点温度,且需要布置大量探头和线缆,可应用性差,且加大了后期维护难度[7]。
相较于传统的接触式测温,非接触式红外测温能够更加直观地检测出目标对象的全场性温度分布,具有测温范围广、响应速度快等优势。图像分割是非接触式红外测温中的重要环节,可以从图像中找出“感兴趣”的区域,以面向对象的方式进行信息处理。C. A. Almeida等采用分水岭算法分割灰度均匀且轮廓清晰的目标[8],冯振新等提出一种基于改进极大稳态区域的红外故障区域分割机制[9],上述方法仅能得到单个视角下的表面温度信息。储能系统在实际运行过程中极易出现内部温度不均匀、局部过热等现象,因此以上方法很难直接应用于电池堆温度监测。
S. Izadi等将三维深度信息融入二维红外图像中,能够捕捉到多个视角下的表面温度信息,但物体内部的温度分布情况依然无法获知[10-11]。王晓松等通过繁琐的边界条件实现了对三维温度场的完整重构,但模型基于理想稳定工作状态搭建,且计算量十分庞大[12]。史贵连等通过内部热源与传热模型重构三维温度场,简化了边界条件,但由于储能系统的生热、传热及散热模型非常复杂,很难通过其行为和特征进行求解[13]。
针对电池堆红外图像存在对比度低、边缘灰度混叠和“感兴趣”区域分割困难的问题,本文在可见光图像上实现目标分离,然后根据仿射变换矩阵求出电池堆在红外图像中的位置,同时对马尔可夫随机场约束下的模糊核C均值聚类算法(Markov Random Field-Kernel based Fuzzy C-Means Clustering, MRF-KFCM)进行改进,引入先验框目标信息对中心像元类别加以约束;针对三维温度场数值求解困难的问题,提出一种基于表面温度场与虚拟热源的三维温度场重构方法,利用表面温度场插值得到立体子单元温度,再通过虚拟热源对三维温度场进行修正。实验结果表明所提方法能够准确直观地反映出电池堆内部温度分布状况,精度满足实际应用需求。
红外热像仪输出的是被测目标的灰度图,无法直接显示温度信息。为了得到被测目标的温度,需要通过辐射定标将其转换为温度数据,常用的辐射定标方法主要分为远距离小源法和近距离扩展源法[14]两种。由于大部分电池堆未充满热成像仪的整个视场,因此本文采用远距离小源法来进行定标。假设在确定的增益条件下,得到目标辐射亮度与红外热像仪输出灰度的关系为[15]
(1)式中,G为红外热成像仪单个像元的输出灰度;R为像元对入射辐射亮度的响应率;τ为红外热像仪与被测目标之间的大气透射率;Lt为被测目标辐射亮度;Lpath为红外热像仪与被测目标之间的大气辐射;B为由杂散辐射、暗电流等因素引起的偏置。黑体表面的辐射亮度 可以通过普朗克公式计算求得[15],进而可得到灰度G与温度T的等式关系,即红外热像仪的辐射定标模型。但该等式较为复杂,很难给出显式的映射关系,故采用最小二乘法进行拟合,得到灰度G与温度T的映射关系。
可以通过普朗克公式计算求得[15],进而可得到灰度G与温度T的等式关系,即红外热像仪的辐射定标模型。但该等式较为复杂,很难给出显式的映射关系,故采用最小二乘法进行拟合,得到灰度G与温度T的映射关系。
由于电池堆温度过高区域与正常区域的灰度不一致,而且其边缘部分的热量交互容易导致灰度混叠,因此对于被测目标的区域分割变得十分困难。同时红外图像通常具有分辨率低、对比度差、易被噪声污染等缺点,单一使用红外图像很难分离出目标对象。文中利用可见光和红外图像之间的信息互补,先在可见光图像中实现目标分割,然后根据仿射变化矩阵得到红外图像的有效区域。MRF-KFCM算法通过结合像元特征域相似性与空间域邻近性,缓解了噪声对传统KFCM算法的影响。但该方法不能很好地解决灰度不均匀、阴影等问题,本文对其进行改进,通过引入先验框目标信息来约束像元的隶属,在提升算法聚类精度的同时加快了收敛速度。
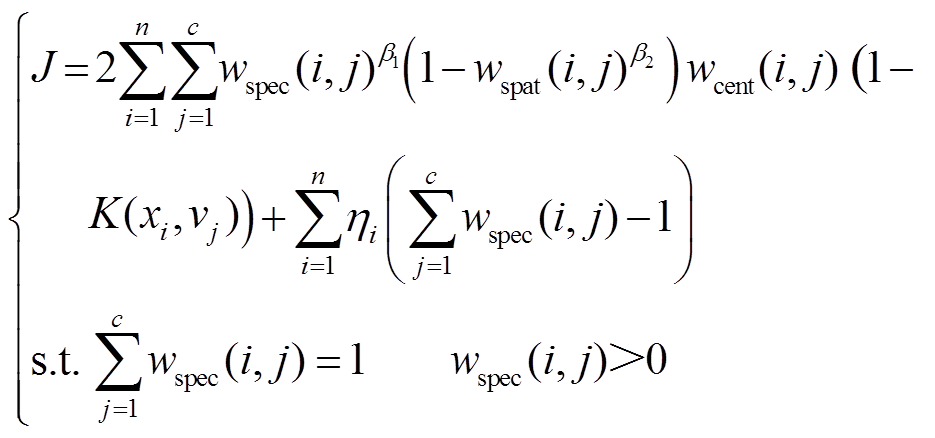
通常相邻的像元具有相似的特征,隶属于同一聚类的概率非常大。MRF-KFCM算法借助MRF模型来表征和处理上下文信息,以此来约束中心像元的类别,实现光谱信息与空间信息的耦合,引入空间信息的目标函数为
 (2)
(2)式中,n为像元数量;c为聚类中心数;xi为第i个像元的灰度值;vj为第j个聚类中心的灰度值; wspec(i,j)为第 个像元相对于第j个聚类中心的光谱隶属度(Spectral Membership);
个像元相对于第j个聚类中心的光谱隶属度(Spectral Membership); 为调节光谱信息模糊程度的超参数;wspat(i,j)为第个像元相对于第j个聚类中心的空间隶属度(Spatial Membership);
为调节光谱信息模糊程度的超参数;wspat(i,j)为第个像元相对于第j个聚类中心的空间隶属度(Spatial Membership); 为调节上下文信息加权程度的超参数;
为调节上下文信息加权程度的超参数; 为核函数的内积,文中采用的是高斯核函数,
为核函数的内积,文中采用的是高斯核函数, 。
。
电池堆可见光图像存在目标区域灰度不一致、阴影等问题,仅使用MRF-KFCM算法不能很好地解决上述问题,本文提出了一种基于先验框目标信息加权的改进MRF-KFCM算法,采用“由粗到细”的思路,“粗”指的是先找出目标的大概位置,“细”指的是在“粗”的基础上进一步分割。
改进的MRF-KFCM算法通过Otsu算法初步获得电池堆的有效区域,然而所得有效区域不属于规则图形,需要用包含该区域的最小矩形加以表示,同时为了避免出现欠分割的情形,适当将矩形框沿对角线向外扩展。利用统计信息(宽度、高度和宽高比例)对上述矩形框进行筛选,剔除其中的误检对象。在对电池堆可见光图像进行聚类前,利用先验框信息给靠近质心的像元赋予更大的目标权重。改进后的MRF-KFCM算法降低了过分割与欠分割的可能性,提高了后续三维温度场重构的准确性。通过引入先验框目标信息可将目标函数改进为
 (3)
(3)式中, 定义为
定义为
式中, 为第i个像元的目标信息权重;
为第i个像元的目标信息权重; 为第i个像元的坐标;
为第i个像元的坐标; 为像元可能归属的第a个矩形区域,
为像元可能归属的第a个矩形区域, ;
; 、
、 、
、 、
、 分别为第i个像元到第a个矩形框上、下、左、右边界的垂直距离;eps为无限小的数;
分别为第i个像元到第a个矩形框上、下、左、右边界的垂直距离;eps为无限小的数; 为调节目标信息加权程度的超参数。可以看出,当一个像元越接近于先验矩形框中心时,目标权重
为调节目标信息加权程度的超参数。可以看出,当一个像元越接近于先验矩形框中心时,目标权重 越大,其相对于目标的光谱隶属度也越大,反之亦然。目标信息的引入可以克服目标区域灰度不一致、边缘部分阴影干扰所带来的分割困扰,同时有助于得到明确的光谱隶属度函数,加快收敛速度。通过拉格朗日乘子法将式(3)改进为
越大,其相对于目标的光谱隶属度也越大,反之亦然。目标信息的引入可以克服目标区域灰度不一致、边缘部分阴影干扰所带来的分割困扰,同时有助于得到明确的光谱隶属度函数,加快收敛速度。通过拉格朗日乘子法将式(3)改进为
 (5)
(5)通过梯度法对式(5)进行求解, 和
和 的更新公式如式(6)所示,当两次迭代的聚类中心变化小于设定阈值时,迭代结束。
的更新公式如式(6)所示,当两次迭代的聚类中心变化小于设定阈值时,迭代结束。
 (6)
(6)
其中

本文实验图片来源于手持式红外热像仪,双光谱摄像头之间存在近似仿射变换的关系。通过一组可见光与红外图像得到仿射变换矩阵(拍摄位置变化需重新计算矩阵),进而可得到红外图像的有效区域。应用形态学闭运算对有效区域中存在的孔洞进行填充,然后求其轮廓,根据轮廓得到包含该区域的凸包,最后通过霍夫变换、解析几何原理求得电池堆的三个表面。
在重构三维温度场的过程中,需要在一张红外图像中同时体现电池堆的三个表面,电池堆表面区域存在透视变形的情况。本文通过投影变换原理,将变形的图像重新映射到一个新的视平面使其恢复正常,新图像的大小与实际电池堆表面大小成比例关系,坐标转换关系(以 平面为例)用公式表达为
平面为例)用公式表达为
 (7)
(7)式中, 为原图像像元坐标;
为原图像像元坐标; 为图像线性变换矩阵;
为图像线性变换矩阵; 为图像平移变换矩阵;
为图像平移变换矩阵; 为图像透视变换矩阵;变换之后的图像像元坐标
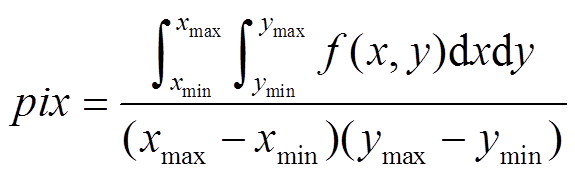
为图像透视变换矩阵;变换之后的图像像元坐标 。为了减少三维重构的时间复杂度,需要对恢复正常的表面区域进行子单元划分,本文将电池堆表面划分成row×col(相同的间距进行划分)个子单元结构,为了较好地保留电池堆表面温度的分布趋势,采用积分的方式计算每个子单元的像元值(以xy平面为例)。
。为了减少三维重构的时间复杂度,需要对恢复正常的表面区域进行子单元划分,本文将电池堆表面划分成row×col(相同的间距进行划分)个子单元结构,为了较好地保留电池堆表面温度的分布趋势,采用积分的方式计算每个子单元的像元值(以xy平面为例)。
 (8)
(8)
式中, 为子单元的左上角坐标;
为子单元的左上角坐标;
 为子单元的右下角坐标;
为子单元的右下角坐标; 为子单元的像元值。当红外热像仪的拍摄角度不同时,同一点的辐射强度(在图像上反映为灰度值)会出现不同程度的差别。当被测目标占用的视场较大时,不同像素点关于灰度与辐射强度的比例关系存在较大差异,因此需要对分割得到的表面进行朗伯余弦矫正[17],即
为子单元的像元值。当红外热像仪的拍摄角度不同时,同一点的辐射强度(在图像上反映为灰度值)会出现不同程度的差别。当被测目标占用的视场较大时,不同像素点关于灰度与辐射强度的比例关系存在较大差异,因此需要对分割得到的表面进行朗伯余弦矫正[17],即
 (9)
(9)
式中, 为各子单元矫正后的灰度值;
为各子单元矫正后的灰度值; 为各子单元校正前的灰度值;
为各子单元校正前的灰度值; 为红外摄像头与各子单元辐射法线的夹角。
为红外摄像头与各子单元辐射法线的夹角。
通过红外热像仪辐射定标模型,将各子单元矫正后的灰度值进行转换,即可得到电池堆表面温度场的分布。
已知表面温度推导求解内部的温度分布和热源位置是一种经典的热传导反问题。目前,对于物体内部的温度场反问题,通常采用数值求解的方式。该方法存在繁琐的边界条件约束,计算量非常庞大,并不适合电池堆三维温度场的实时重构。针对上述问题,本文提出了一种基于表面温度场与虚拟热源的三维温度场重构方法,将热传导的反问题转换成正问题,避免了传统数值方法中繁琐的边界条件,简化了温度分布和热源位置的求解过程。
根据表面温度场可初步重构电池堆三维温度场,表达式为
 (10)
(10)式中, 为立体子单元
为立体子单元 的温度;
的温度; 为控制不同初始化方法权重的系数,本文取
为控制不同初始化方法权重的系数,本文取 ;
; 、
、 、
、 为立体子单元相邻表面子单元或立体子单元的温度值;
为立体子单元相邻表面子单元或立体子单元的温度值; 、
、 、
、 为不同表面子单元的温度;
为不同表面子单元的温度; 、
、 、
、 为不同表面子单元对相应的立体子单元权重;
为不同表面子单元对相应的立体子单元权重; 、
、 、
、 为立体子单元到
为立体子单元到 、
、 、表面的垂直距离;
、表面的垂直距离; 为调节距离影响程度的超参数,本文取
为调节距离影响程度的超参数,本文取 。
。
式(10)得到的电池堆三维温度场虽然符合温度变化趋势,但所有样本点只来源于表面,因此不能很好地表现内部的温度场差异,同时热源附近存在较大的重构误差。文中根据历史数据与专家经验,将热电阻放置在电池堆积热较为严重的地方,以虚拟热源的形式向邻近立体子单元辐射,对三维温度场进行矫正,修正量 用公式表达为
用公式表达为

 (11)
(11)
式中, 为热电阻温度的集合,
为热电阻温度的集合,
 ;
; 为第
为第 个虚拟热源的温度;
个虚拟热源的温度; 为第个虚拟热源所属立体子单元的温度;
为第个虚拟热源所属立体子单元的温度; 为虚拟热源到立体子单元的直线距离;
为虚拟热源到立体子单元的直线距离; 为第个虚拟热源的辐射半径。综上所述,每个立体子单元的重构温度为初始量与修正量的叠加,即
为第个虚拟热源的辐射半径。综上所述,每个立体子单元的重构温度为初始量与修正量的叠加,即
 (12)
(12)为了验证所提出的基于改进MRF-KFCM有效区域分割的三维温度场重构方法,以实验室的电池堆为研究对象,进行了三维温度场重构实验。首先进行红外热像仪辐射定标实验,得到关于灰度与温度的映射模型,然后基于目标信息加权的MRF-KFCM算法对可见光图像进行分割,通过仿射变换矩阵获取红外图像的有效区域,最后通过表面温度场与虚拟热源重构电池堆三维温度场,并对结果进行了对比分析。
辐射定标中使用的红外热成像仪来自于FILR公司研制的非制冷长波红外热像仪Ti27,工作波段为8~14mm,探测器像元数为 ,输出位数为8bit。实验中所用的辐射源为HT-C100高精度面源黑体,发射率为0.95,辐射面大小为
,输出位数为8bit。实验中所用的辐射源为HT-C100高精度面源黑体,发射率为0.95,辐射面大小为 ,温度精度为0.1℃。
,温度精度为0.1℃。
对Ti27进行定标测试,首先根据电池堆正常工作温度范围设定红外热像仪增益,使其测温范围在20~35℃,并将红外热像仪与黑体源的距离保持在1m左右,为了减小环境温度对定标结果的影响,设定黑体的起始温度略高于室温,之后依次增加黑体的温度,每次上升0.1~1℃不等,待温度稳定后,记录当前的黑体温度值,同时保存热像仪输出的灰度图像。图1为黑体温度稳定在28.8℃时的中心局部区域灰度直方图,可见灰度级分布存在一定的范围,因此文中算例在处理黑体的红外热图时,采取对中心局部区域取灰度平均值的方法。
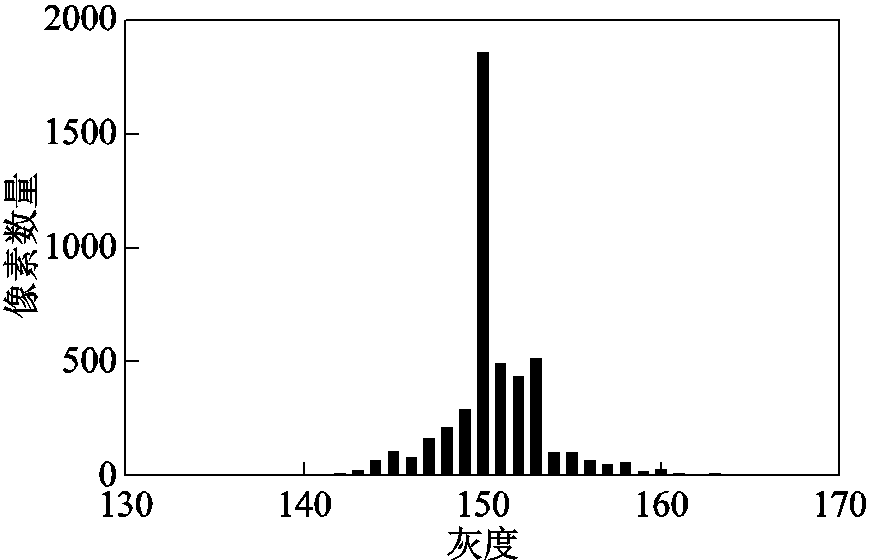
图1 黑体温度稳定在28.8 ℃时的灰度直方图
Fig.1 Gray histogram of black body temperature at 28.8℃
采用最小二乘法对上述样本数据进行拟合,得到Ti27在环境温度20℃下灰度与温度的映射关系,如图2所示。
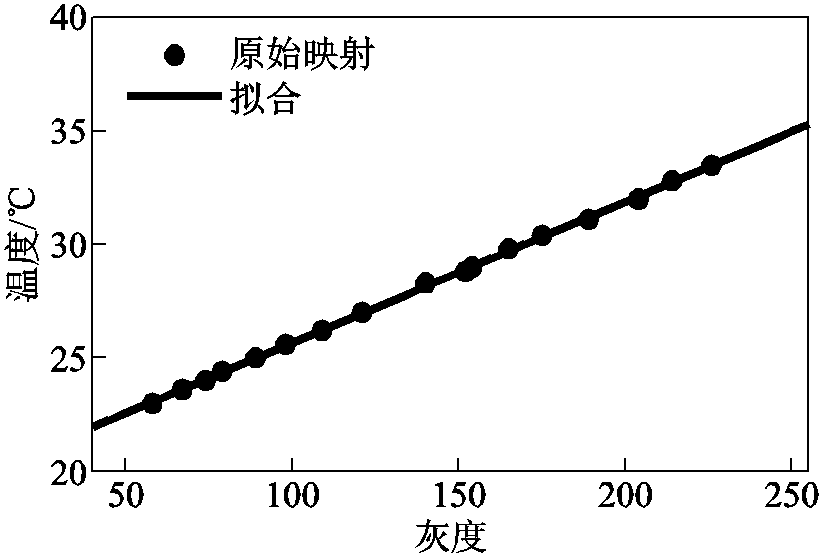
图2 环境温度20℃下的灰度与温度的映射关系
Fig.2 The relationship between gray scale and temperature at ambient temperature of 20℃
从图2中可以看出近似线性变化关系,经理论拟合可得
 (14)
(14)采用上述方程进行拟合计算,对计算得到的温度误差 进行分析,分析结果如图3所示,拟合曲线最大误差小于0.15℃,均误差0.060 1℃,方差0.001 3℃,温度测量准确度得到了很好的保证。
进行分析,分析结果如图3所示,拟合曲线最大误差小于0.15℃,均误差0.060 1℃,方差0.001 3℃,温度测量准确度得到了很好的保证。
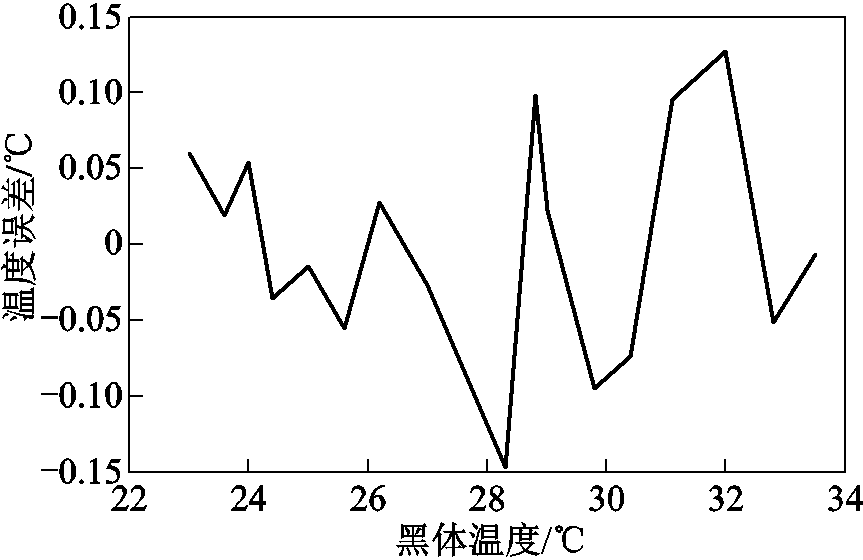
图3 测温误差分析
Fig.3 Analysis of temperature measurement error
红外热像仪定标结果用于电池堆三维温度重构实验,把灰度信息转换为温度信息。
在实现分割算法之前需要确定以下参数:初始聚类中心 的选择直接影响到聚类结果的好坏,文中通过Otsu方法获得的最佳阈值来完成聚类中心的初始化;
的选择直接影响到聚类结果的好坏,文中通过Otsu方法获得的最佳阈值来完成聚类中心的初始化; 与
与 分别是控制光谱与空间隶属度的两个超参数,在同质区域中,空间隶属度能够加强光谱隶属度函数,使得中心像素的隶属更加明确,在异质区域中,通过像元的上下文特性,减少了错误划分的像元,多次尝试后发现当
分别是控制光谱与空间隶属度的两个超参数,在同质区域中,空间隶属度能够加强光谱隶属度函数,使得中心像素的隶属更加明确,在异质区域中,通过像元的上下文特性,减少了错误划分的像元,多次尝试后发现当 ,
, 时分割效果最佳;参数
时分割效果最佳;参数 是调节目标信息加权程度的超参数,过大过小都会使得先验框内大部分像素隶属于某一类,过大则丢失的目标区域越多,过小则保留的背景区域越多,多次尝试后发现当
是调节目标信息加权程度的超参数,过大过小都会使得先验框内大部分像素隶属于某一类,过大则丢失的目标区域越多,过小则保留的背景区域越多,多次尝试后发现当 时分割效果最佳;参数
时分割效果最佳;参数 决定于目标与背景之间的差异程度,可以利用像素点间的距离方差进行估算,为了减小边缘部分灰度混叠的影响,本文取边缘区域的像素点进行计算[18]。根据上述、、参数,本文方法得到的分割结果如 图4所示。
决定于目标与背景之间的差异程度,可以利用像素点间的距离方差进行估算,为了减小边缘部分灰度混叠的影响,本文取边缘区域的像素点进行计算[18]。根据上述、、参数,本文方法得到的分割结果如 图4所示。

图4 电池堆可见光图像及其分割结果
Fig.4 Visible image of battery stack and its segmentation results
为定量分析分割结果的准确率,引入两个评价指标:精确率 (precision)和召回率
(precision)和召回率 (recall)。的值越大,表明算法错分割的区域更小;的值越大,表明算法分割目标的能力越好。因为和不能同时兼顾,算例引入
(recall)。的值越大,表明算法错分割的区域更小;的值越大,表明算法分割目标的能力越好。因为和不能同时兼顾,算例引入 分数进行调和平均,分数越大,分割效果越好。文中方法分割结果的定量分析见表1。
分数进行调和平均,分数越大,分割效果越好。文中方法分割结果的定量分析见表1。
表1 分割结果定量分析
Tab.1 Quantitative analysis of segmentation results

编号PRF1 原始图像10.982 80.986 20.984 5 原始图像20.989 10.970 20.979 7
由图4及表1可知,在两组实验结果中,本文算法能够较完整地分割出目标区域,同时混入的背景区域极少。分别应用KFCM算法和MRF-KFCM算法对原始图像1进行分割,并应用相同的图像后处理技术对分割结果进行处理,上述两种算法与本文算法分割结果的定性对比如图5所示,定量对比见表2。
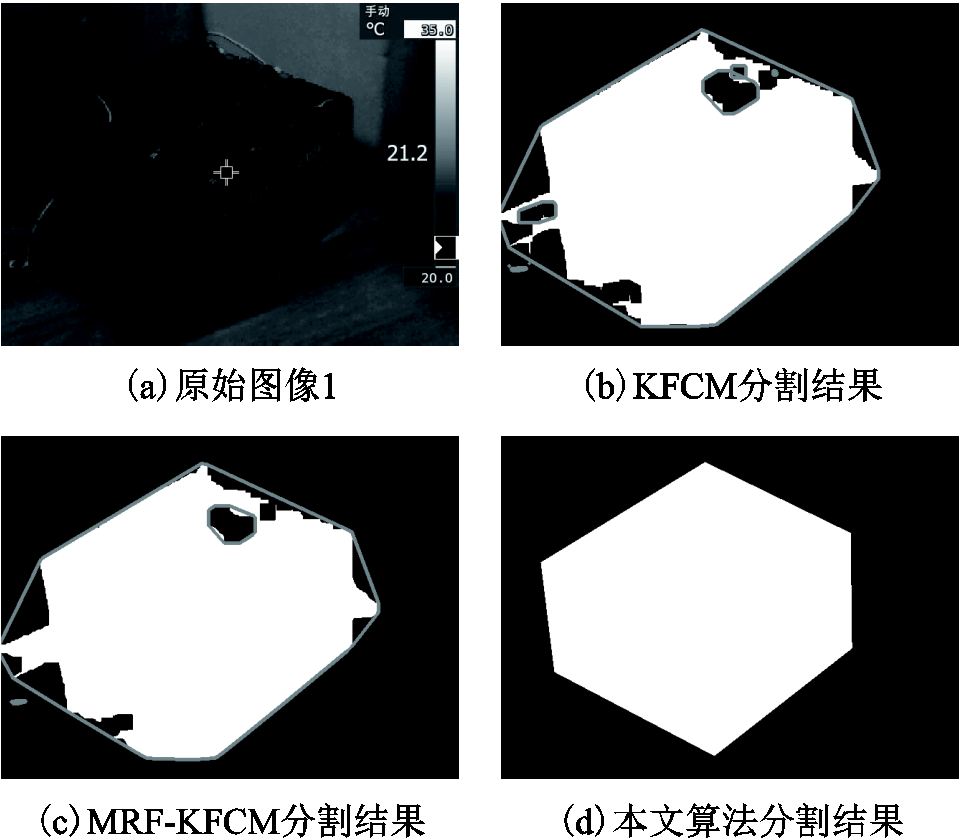
图5 KFCM和MRF-KFCM、本文算法的分割对比
Fig.5 The segmentation comparison between KFCM and MRF-KFCM and the proposed algorithm
表2 KFCM、MRF-KFCM和本文算法的定量比较结果
Tab.2 Quantitative comparison results of KFCM, MRF-KFCM, and the proposed algorithms

算法PRF1 KFCM0.896 00.952 10.924 0 MRF-KFCM0.882 40.959 90.921 2 本文算法0.982 80.986 80.984 5
由图5与表2可知,因为电池堆存在灰度不一致问题,导致KFCM和MRF-KFCM算法出现了欠分割的情况,虽然欠分割情况可以通过形态学闭运算进行处理,不过会加大边缘阴影部分带来的误差。同时由于电池堆边缘阴影的存在,KFCM与MRF-KFCM算法出现了较为严重的过分割情况,给凸包的求取带来很大困难。本文算法通过Otsu获得目标矩形框,以此给靠近质心的像元赋予更大的目标权重,与光谱信息以及上下文信息共同决定像元的隶属,结果表明分割效果较为理想,能够较完整地划分出目标区域,同时只引入了极少量的背景区域。图6对比了不同分割算法的收敛速度,从中可以看出MRF-KFCM算法收敛速度明显快于KFCM算法,所提算法在MRF-KFCM算法的基础上额外引入目标信息,使得像元的光谱隶属度更加明确,进一步加快了收敛速度。
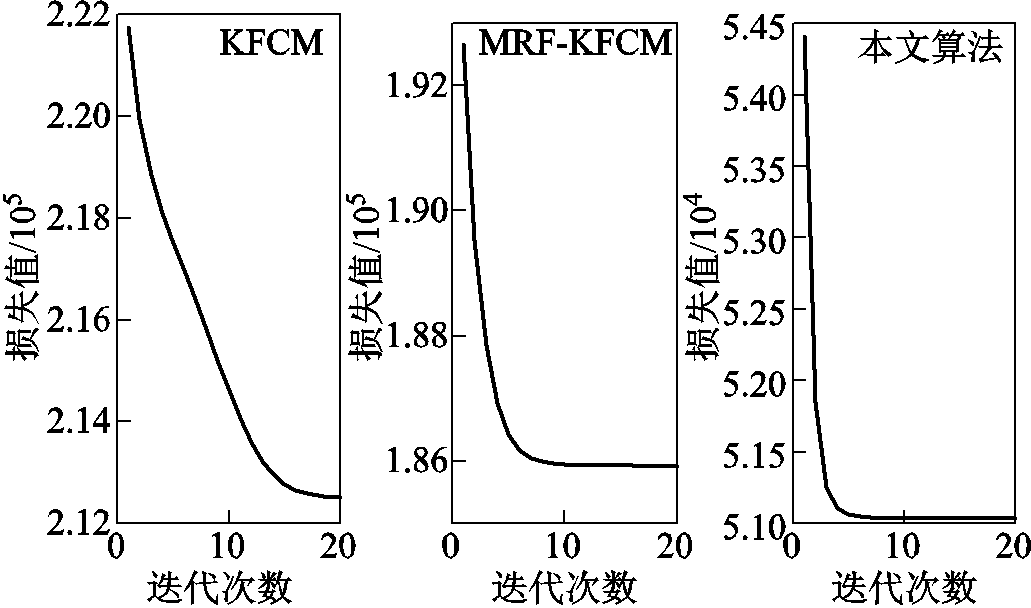
图6 KFCM、MRF-KFCM和本文算法的损失值对比
Fig.6 Loss comparison between KFCM, MRF-KFCM and the proposed algorithm
在实现重构算法之前需要确定辐射半径 参数,以虚拟热源为球心,计算球心内子单元的最大温差,接着按照一定步长(根据趋势变化选择)增加辐射半径,直至两次最大温度差的变化量小于预设的阈值,以此时的rind作为虚拟热源最终的辐射半径。电池堆温度重构模型以三维矩阵的形式表示,这里以Matlab实现电池堆三维温度场的可视化展示。图7为电池堆红外图像,图8所示为最高温度点所在坐标截面的温度分布。图中比色条将温度值的变化定义为色彩的渐变,每个立体子单元以不同的色彩表现不同的温度。温度最高的立体子单元为
参数,以虚拟热源为球心,计算球心内子单元的最大温差,接着按照一定步长(根据趋势变化选择)增加辐射半径,直至两次最大温度差的变化量小于预设的阈值,以此时的rind作为虚拟热源最终的辐射半径。电池堆温度重构模型以三维矩阵的形式表示,这里以Matlab实现电池堆三维温度场的可视化展示。图7为电池堆红外图像,图8所示为最高温度点所在坐标截面的温度分布。图中比色条将温度值的变化定义为色彩的渐变,每个立体子单元以不同的色彩表现不同的温度。温度最高的立体子单元为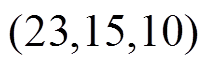 ,其温度值为32.9℃。
,其温度值为32.9℃。

图7 电池堆红外图像
Fig.7 Infrared image of battery stack
本文同时使用反距离权重(Inverse Distance Weighting, IDW)算法对电池堆进行空间插值。实验过程中热电阻粘贴在箱与箱之间(锂电池粘贴在单体电池),其分布位置如图8所示,均匀分布在整个电池堆。图9a中的1~5号热电阻用来验证重构模型的精度,18号为虚拟热源的位置,图9b为IDW算法增加的热电阻。
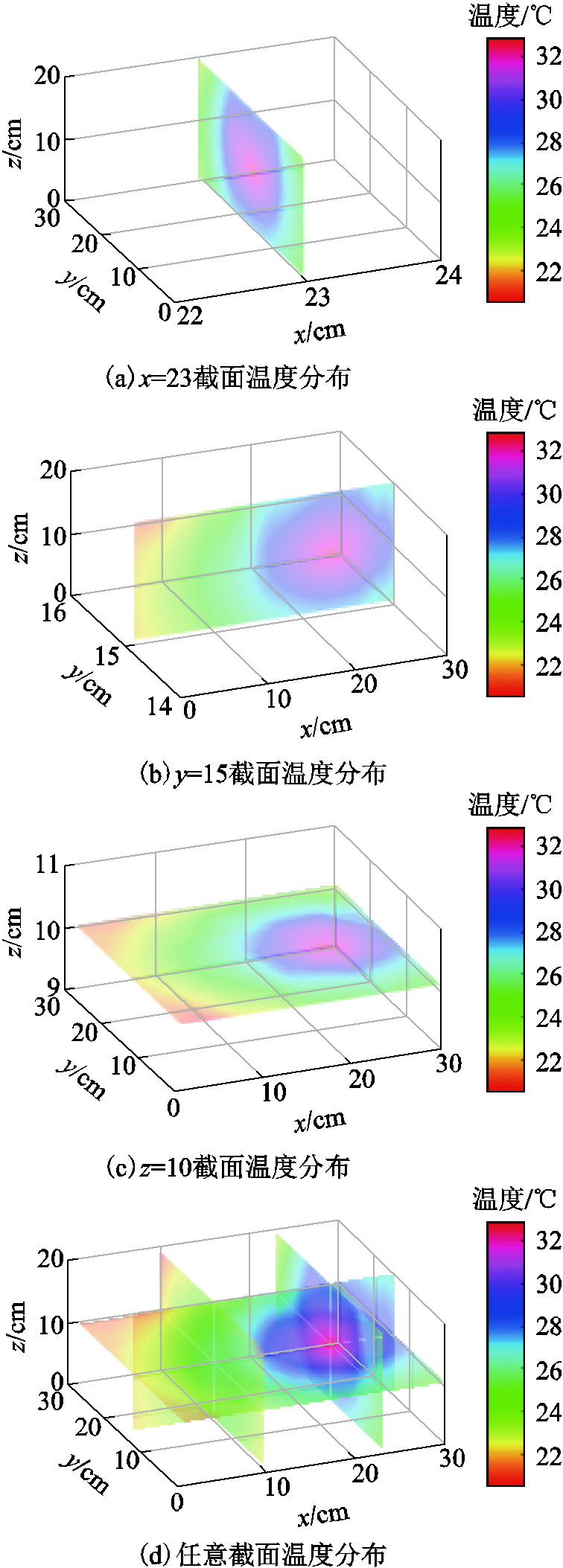
图8 电池堆三维温度可视化
Fig. 8 3D temperature visualization of battery stack
IDW算法与所提算法重构结果的定性对比如图10所示,定量对比见表3。由图10和表3可知,IDW算法重构的模型与实际温度变化趋势相差较大,局部温度的差异无法体现,与热源相近的3号和4号位置出现较大误差,验证数据方均根误差为1.72℃,最大误差为2.47℃。当局部温度有较大波
图9 热电阻铺设示意图
Fig. 9 Schematic diagram of thermal resistance laying
表3 热源32.9℃时不同重构算法的定量比较结果
Tab.3 Quantitative comparison results of different reconstruction algorithms at heat source 32.9℃

热电阻编号热电阻温度/℃IDW算法/℃文中重构算法/℃ 125.2024.3024.50 225.4024.3724.57 329.6027.1330.39 429.5027.0830.20 527.2026.2427.94

图10 热源32.9℃时不同算法重构的定性比较结果
Fig. 10 Qualitative comparison results of different reconstruction algorithms at heat source 32.9℃
动时,IDW算法对样本点的个数以及分布情况都十分敏感,这会给复杂系统的重构带来困难。所提方法根据虚拟热源传热的变化趋势(距离热源越近,温度的变化趋势越快。反之,距离越远变化趋势越平缓)修正了由表面温度场初步重构的三维温度场。输出的三维温度场模型符合真实的表面变化趋势,能够较好地反映局部数据的差异,验证数据集方均根减小了约1.14℃,最大误差减小了约1.64℃,同时该方法只将热电阻埋留在积热严重的地方,能够有效降低传感器的数量。
针对红外图像对比度低、边缘部分热量交互,电池堆分割困难的问题,综合利用可见光和红外图像,提出了一种基于先验框目标信息加权的改进MRF-KFCM算法,通过引入先验框目标信息,解决了电池堆可见光图像存在的目标区域灰度不一致、边缘阴影等问题;针对非接触式红外测温方法只能监测储能系统表面,无法获知内部温度分布情况的问题,提出了一种基于表面温度场与虚拟热源的三维温度场重构方法,将复杂的热传导反向问题转换为正向问题,极大地简化了传统求解过程中数值处理的计算量。实验结果表明:
1)所提分割算法可以精确和快速地划分出电池堆红外图像中的有效区域, 分数高达0.98左右,比KFCM、MRF-KFCM算法高出约6%;对于已知目标质心或目标可能区域的图像均可进行有效分割,具有良好的鲁棒性。
分数高达0.98左右,比KFCM、MRF-KFCM算法高出约6%;对于已知目标质心或目标可能区域的图像均可进行有效分割,具有良好的鲁棒性。
2)所提重构方法可以更加准确和直观地反映出电池堆内部的温度分布情况,并能较好地体现局部的温度差异,验证所用数据的方均根误差为0.58℃,最大误差为0.83℃。
参考文献
[1] 王成山, 武震, 李鹏. 微电网关键技术研究[J]. 电工技术学报, 2014, 29(2): 1-12. Wang Chengshan, Wu Zhen, Li Peng. Research on key technologies of microgrid[J]. Transactions of China Electrotechnical Society, 2014, 29(2): 1-12.
[2] 周林, 黄勇, 郭珂. 微电网储能技术研究综述[J]. 电力系统保护与控制, 2011, 39(7): 147-152. Zhou Lin, Huang Yong, Guo Ke. A survey of energy storage technology for micro grid[J]. Power System Protection and Control, 2011, 39(7): 147-152.
[3] 赵卓立, 杨苹, 郑成立, 等. 微电网动态稳定性研究述评[J]. 电工技术学报, 2017, 32(10): 111-122. Zhao Zhuoli, Yang Ping, Zheng Chengli, et al. Review on dynamic stability research of microgrid[J]. Transactions of China Electrotechnical Society, 2017, 32(10): 111-122.
[4] 戴兴建, 邓占峰, 刘刚, 等. 大容量先进飞轮储能电源技术发展状况[J].电工技术学报, 2011, 26(7): 133-140. Dai Xingjian, Deng Zhanfeng, Liu Gang, et al. Review on advanced flywheel energy storage system with large scale[J]. Transactions of China Electrotechnical Society, 2011, 26(7): 133-140.
[5] 李建林, 马会萌, 惠东. 储能技术融合分布式可再生能源的现状及发展趋势[J]. 电工技术学报, 2016, 31(14): 1-10. Li Jianlin, Ma Huimeng, Hui Dong. Present development condition and trends of energy storage technology in the integration of distributed renewable energy[J]. Transactions of China Electrotechnical Society, 2016, 31(14): 1-10.
[6] 姚勇, 朱桂萍, 刘秀成. 电池储能系统在改善微电网电能质量中的应用[J]. 电工技术学报, 2012, 27(1): 85-89. Yao Yong, Zhu Guiping, Liu Xiucheng. Improvement of power quality of micro-grids by battery energy storage system[J]. Transactions of China Electrotechnical Society, 2012, 27(1): 85-89.
[7] 许守平, 侯朝勇, 杨水丽. 一种适用于大容量储能技术的锂离子电池管理系统[J]. 储能科学与技术, 2016, 5(1): 69-77. Xu Shouping, Hou Chaoyong, Yang Shuili. A Li-ion battery management system for large-capacity energy storage[J]. Energy Storage Science and Technology, 2016, 5(1): 69-77.
[8] Almeida C A L, Braga A P, Nascimento S, et al. Intelligent thermographic diagnostic applied to surge arresters: a new approach[J]. IEEE Transactions on Power Delivery, 2009, 24(2): 751-757.
[9] 冯振新, 周东国, 江翼, 等. 基于改进MSER算法的电力设备红外故障区域提取方法[J]. 电力系统保护与控制, 2019, 47(05): 123-128. Feng Zhenxin, Zhou Dongguo, Jiang Yi, et al. Fault region extraction using improved MSER algorithm with application to the electrical system[J]. Power System Protection and Control, 2019, 47(5): 123-128.
[10] Izadi S, Kim D, Hilliges O, et al. KinectFusion: real-time 3D reconstruction and interaction using a moving depth camera[C]//Proceedings of the 24th annual ACM symposium on User interface software and technology. Santa Barbara, California, USA, 2011: 559-568.
[11] Vidas S, Moghadam P, Bosse M. 3D thermal mapping of building interiors using an RGB-D and thermal camera[J]. IEEE Sensors Journal, 2015, 15(2): 1145-1152.
[12] 王晓松, 游峰, 张敏吉, 等. 集装箱式储能系统数值仿真模拟与优化[J]. 储能科学与技术, 2016, 5(4): 577-582. Wang Xiaosong, You Feng, Zhang Minji. Numerical simulation and parametric optimization on the container type energy storage system [J]. Energy Storage Science and Technology, 2016, 5(4): 577-582.
[13] 史贵连, 李凯扬, 叶福丽. 基于自适应模拟退火算法的生物体三维温度场重构研究[J] 机械工程学报, 2016, 52(6): 166-173. Shi Guilian, Li Kaiyang, Ye Fuli. Research on 3D temperature field in biological tissue based on adaptive simulated annealing algorithm[J]. Journal of Mechanical Engineering, 2016, 52(6): 166-173.
[14] 陆子凤. 红外热像仪的辐射定标和测温误差分析[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2010.
[15] 郭立红, 郭汉洲, 杨词银, 等. 利用大气修正因子提高目标红外辐射特性测量精度[J]. 光学精密工程, 2016, 24(8): 1871-1877.Guo Lihong, Guo Hanzhou, Yang Ciyin, et al. Improvement of radiation measurement precision for target by using atmosphere-corrected coefficients[J]. Optics and Precision Engineering, 2016, 24(8): 1871-1877.
[16] 吴越, 朱之贞, 方勇华, 等. 非制冷型长波红外光谱仪的辐射定标方法研究[J]. 光学学报, 2019, 39(9): 1-13. Wu Yue, Zhu Zhizhen, Fang Yonghua, et al. Research on radiation calibration method of uncooled long-wave infrared spectrometer[J]. Acta Optica Sinica, 2019, 39(9): 1-13.
[17] 王华伟. 基于红外热成像的温度场测量关键技术研究[D]. 西安: 中国科学院研究生院(西安光学精密机械研究所), 2013.
[18] 张敏, 于剑. 基于划分的模糊聚类算法[J]. 软件学报, 2004, 15(6): 858-868. Yu Jian. Fuzzy partitional clustering algorithms[J]. Journal of Software, 2004, 15(6): 858-868.
3D Temperature Field Reconstruction Method for Energy Storage System Based on Improved MRF-KFCM Effective Region Segmentation
Abstract Energy storage system is one of the core components of microgrid, and its thermal management is of great significance to the safety and stability of microgrid. The Infrared Thermal Imager cannot monitor the internal temperature filed of the battery stack,which is more important.Aiming at this problem, a 3D temperature field reconstruction method based on surface temperature field and virtual heat source has been proposed. The effective region isextracted by the segmentation algorithm and mapped to the surface temperature field by calibration. Then, the 3D temperature field of the battery stack is preliminarily reconstructed, and then the temperature of sub-unit is modified by virtual heat source. In order to depress the influence on the 3D reconstruction which caused by the inaccurate region segmentation of infrared image of battery stack, the Kernel-Based Fuzzy C-Means Clustering algorithm under the constraint of Markov Random Field has been improved. In this method, the preliminary effective region of the battery stack in the visible light image can obtained by Otsu algorithm, and assigning pixels to cluster with different target information weight, then the accurate position in the infrared image is obtained by registration. Experimental results show that the proposed method can reflect the variation trend and local difference of the internal temperature of the battery stack, and the accuracy can meet the practical application requirements.
keywords:Thermal management of energy storage system, 3D temperature field reconstruction, Markov random field-Kernel based fuzzy C-means clustering (KFCM), prior frame target information, radiation calibration
中图分类号:TP391
DOI:10.19595/j.cnki.1000-6753.tces.191615
潘国兵 男,1978年生,博士,副教授,研究方向为分布式能源、电力系统自动化、物联网与人工智能。E-mail:gbpan@zjut.edu.cn(通信作者)
王 杰 男,1994年生,硕士研究生,研究方向为分布式能源与微电网。E-mail:504429895@qq.com
国家重点研发计划(2017YFA0700301)和浙江省重点研发计划(2018C01081)资助项目。
收稿日期 2019-11-25
改稿日期 2020-02-19
(编辑 郭丽军)