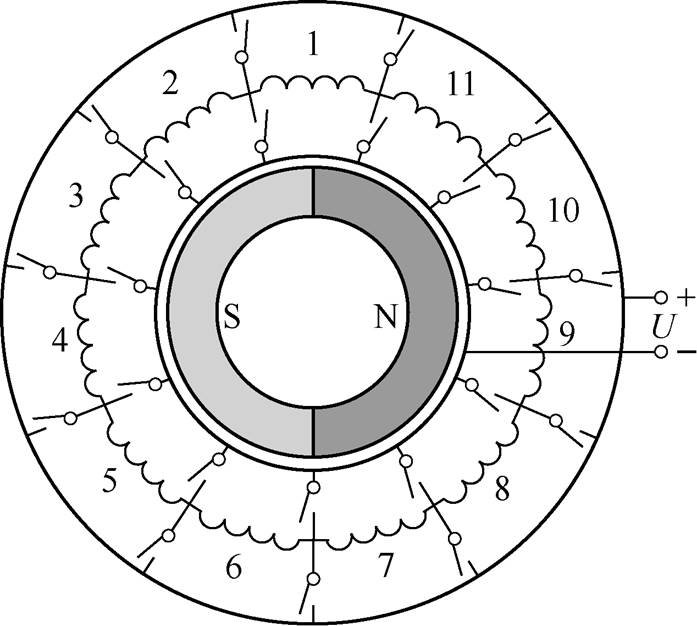
图1 CWBLDC电机结构示意图
Fig.1 Structure of CWBLDC motor
摘要 环形绕组无刷直流(CWBLDC)电机的结构与有刷直流电机相似,定子绕组环形连接,用可控开关替代换向器,转子为永磁体磁极。由于其结构的特殊性,传统永磁电机的驱动控制方法不适用于CWBLDC电机。该文结合CWBLDC电机的结构特点,详细分析CWBLDC电机四象限控制原理。首先介绍CWBLDC电机系统;然后分析其正转电动和反转电动的时序控制方法,并分析电机的制动过程及制动电流可控的原理;最后对分析过程进行仿真,并搭建了实验平台进行实验。仿真和实验结果表明,该文对CWBLDC电机的电动运行分析正确,制动方式有效,能实现CWBLDC电机的四象限运行。
关键词:CWBLDC 电动运行 制动运行 四象限运行
环形绕组无刷直流(Circular Winding Brushless DC, CWBLDC)电机[1-2]是一种新型的多相方波永磁电机,继承了传统有刷直流电机绕组环形的拓扑结构,并采用电子开关取代电刷换向提高可靠性,具体结构如图1所示,绕组空间分布如图2所示。由于采用方波供电,其转矩密度高于传统正弦永磁同步电机,同时采用多相分数槽设计,其转矩脉动接近于传统正弦永磁同步电机[3-6],因而在飞机、舰船推进等高性能应用场合具有广阔的前景。
图1 CWBLDC电机结构示意图
Fig.1 Structure of CWBLDC motor
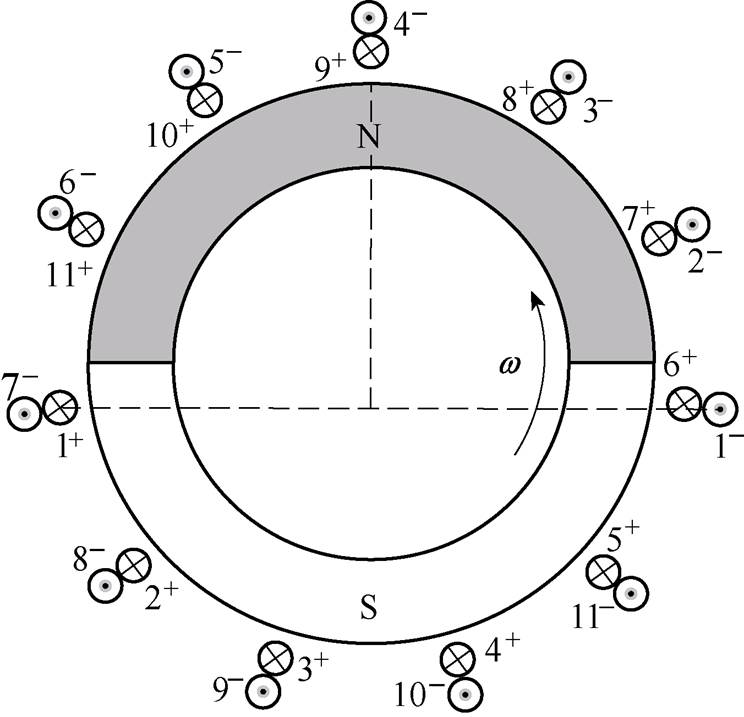
图2 CWBLDC电机绕组空间分布
Fig.2 Winding spacial distribution of CWBLDC motor
目前应用较广的永磁电机主要有永磁同步电机和永磁无刷直流电机,这两种电机的绕组多采用三相或者多三相星形联结的方式,控制的基本原理和控制策略较为成熟。正弦供电的三相永磁同步电机在电压空间矢量控制技术的基础上,发展了矢量控制、直接转矩控制[7-8]、滑模变结构控制[9-10]、自适应控制[11-12]等多种控制方法。方波供电的三相永磁无刷直流电机多采用二二导通或三三导通的六步电流换向法,根据霍尔传感器的位置信号,控制绕组电流[13-16]。
当CWBLDC电机应用于舰船推进、电动汽车等场合时,需要实现正转、反转、电动、制动等电机四象限切换运行功能,而三相永磁同步电机的正弦波调制方法不适应于方波供电的CWBLDC电机。三相永磁无刷直流电机虽然采用方波供电,但二二导通方式存在关断相,而CWBLDC电机绕组为环形连接,所有相绕组同时导通;三三导通方式虽然不存在关断相,但CWBLDC电机一般相数较多,也不能直接应用三三导通的控制方法。因此传统永磁电机的电动、制动等的驱动控制方法不能直接应用于CWBLDC电机,有必要对CWBLDC电机的正反转过程、电动制动切换的四象限功能进行系统的研究。
CWBLDC电机系统包括电机本体、调压电路、换向电路以及控制电路,其控制系统框图如图3所示。转速环通过PI调节得到调压电路的输出电压,换向电路的开关器件根据开关时序表来导通和关断不同相电流,实现CWBLDC电机的四象限控制。
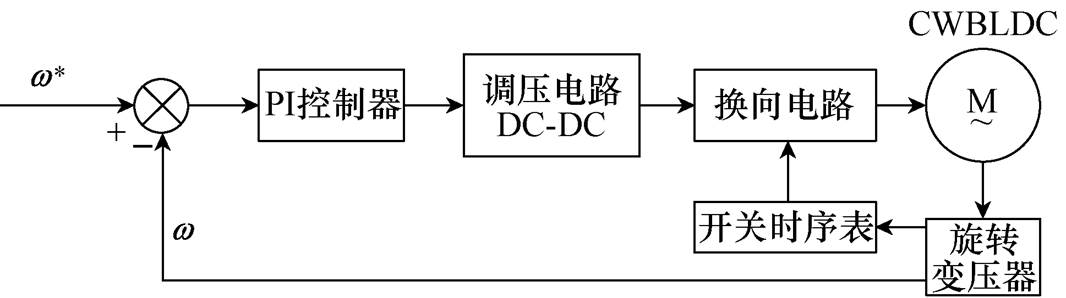
图3 CWBLDC电机控制系统框图
Fig.3 Block diagram of CWBLDC motor control
调压电路,包括斩波电路、升压电路和制动耗能电路三部分,如图4所示。图中,S1和Spre为继电器开关,Rpre为预充电电阻,C1为电源支撑电容。其中,S1为电路电源总开关,Spre为电容预充电控制开关。在电路上电过程中,Spre断开,通过电阻Rpre限制C1的充电电流,当C1的电压达到阈值之后,Spre闭合,电阻Rpre被短路;可控功率开关SH、二极管VDL、滤波电感L1和滤波电容C2组成斩波电路,调节电机的母线输入电压;可控功率开关SL、二极管VDH和滤波电感L1组成升压电路,在电机制动过程中调节制动电流和制动速度;可控功率开关Sbrk和电阻Rbrk构成耗能电路,在C1放电或者电机制动的过程中,闭合开关Sbrk,通过电阻Rbrk消耗电容C1存储的能量或者电机的机械能。
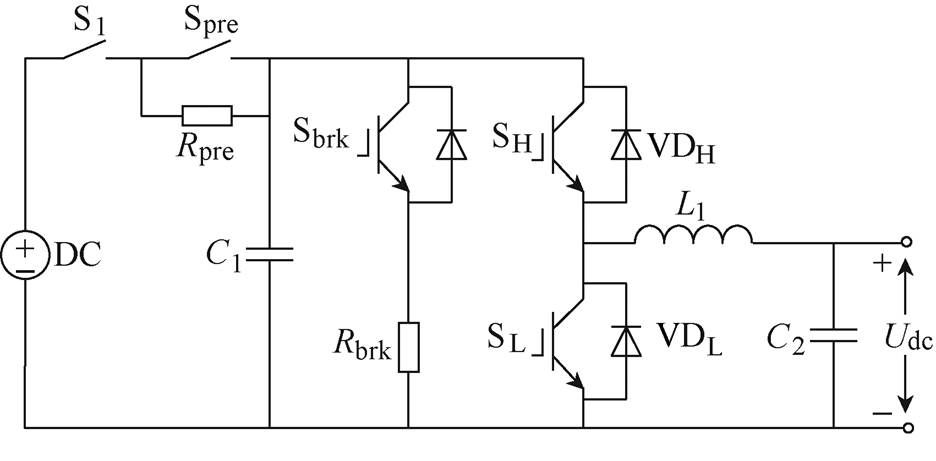
图4 调压电路结构
Fig.4 Topological structure of voltage regulator circuit
下面以16极50槽CWBLDC电机为例说明CWBLDC电机的换相电路和电机本体的特征。16极50槽CWBLDC电机由两个单元电机并联组成,每个单元电机为8极25相,其换向电路和电机本体的拓扑连接如图5所示,25相绕组首尾连接成环形,每相绕组两端连接H桥电路,构成换向主电路。组成H桥的功率开关管为可控器件,并反向并联二极管。
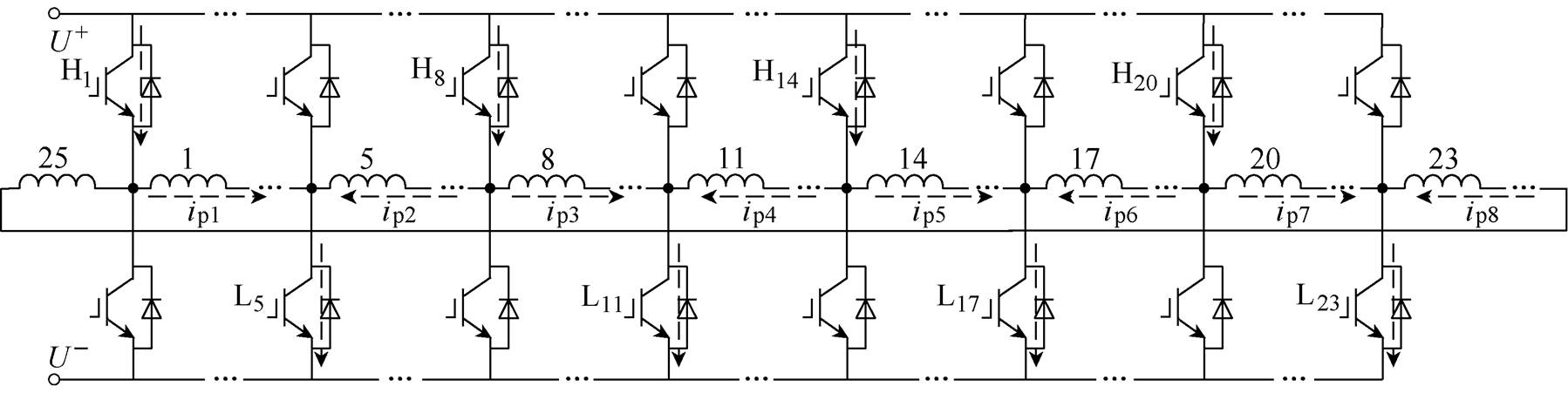
图5 16极50槽CWBLDC电机换向电路和电机本体拓扑连接
Fig.5 The topological connection of commutation circuit and motor body in 16-pole-50-slot CWBLDC motor
16极50槽CWBLDC电机稳定运行时,上下各有4个功率开关导通工作。以开关(H1、L5、H8、L11、H14、L17、H20、L23)导通时的状态为例分析,绕组1、2、3、4串联组成支路p1,绕组5、6、7串联组成支路p2,绕组8、9、10串联组成支路p3,依此规律,25相绕组共组成8条并联支路,流过的电流分别是ip1~ip8,直流母线电流为idc,其等效电路如图6所示。
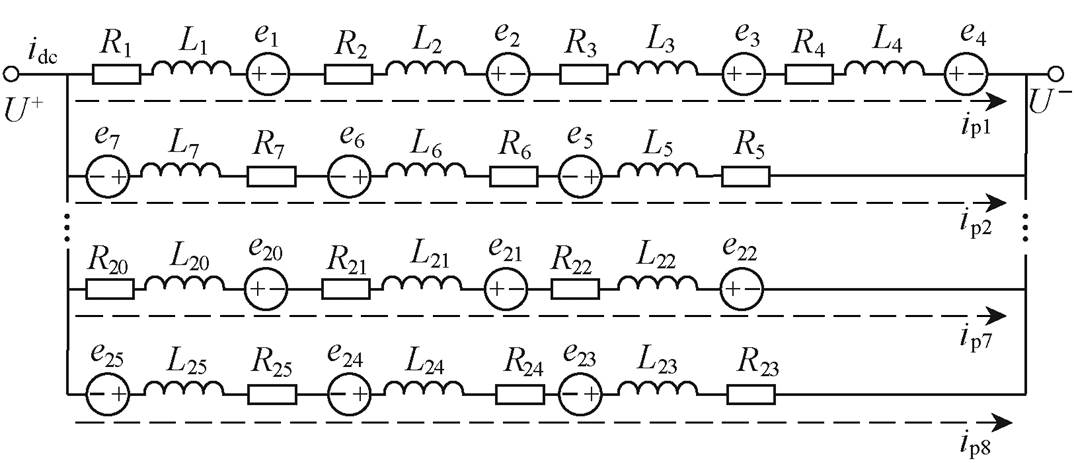
图6 16极50槽CWBLDC电机等效电路
Fig.6 The equivalent circuit of 16-pole-50-slot CWBLDC motor
由图6所示的等效电路可以看出,CWBLDC电机稳态运行时状态与直流电机基本一致,因此可以得到CWBLDC电机的机械特性曲线也与直流电机机械特性相似,如图7所示。在同一负载转矩的工况下,通过调节电机母线电压可以调节电机转速。
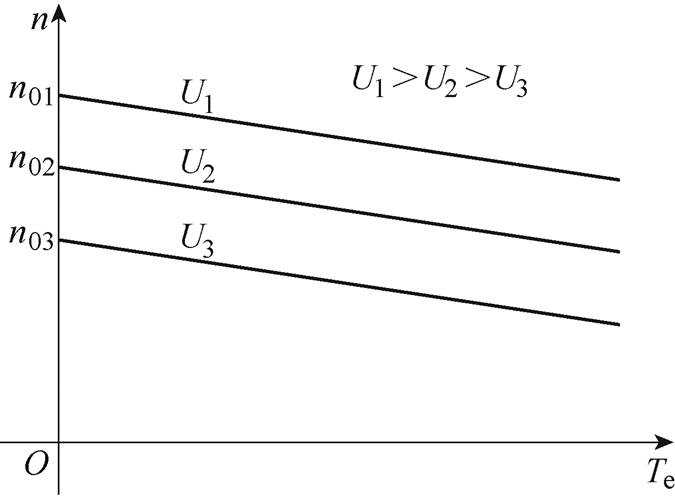
图7 CWBLDC电机的机械特性曲线
Fig.7 The mechanical characteristics of CWBLDC motor
当CWBLDC电机电动运行时,电路拓扑结构如图8所示,此时由可控功率开关SH,二极管VDL和电感L1组成的斩波电路工作,通过调节SH的占空比控制CWBLDC电机的母线输入电压。
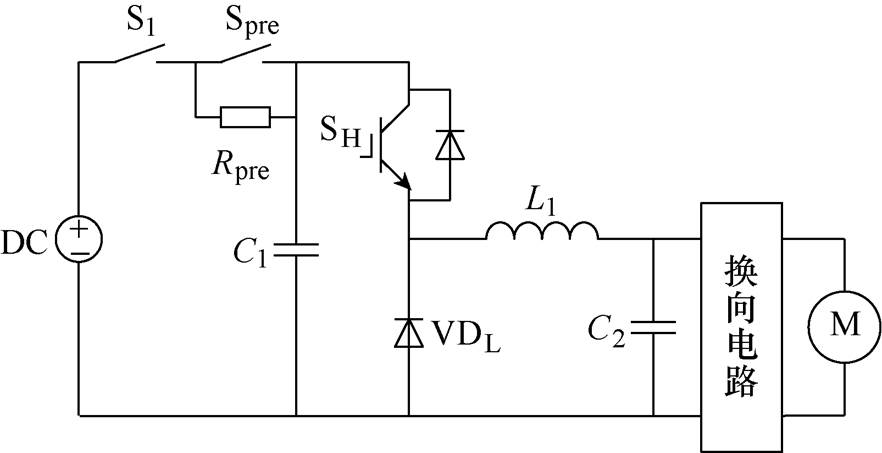
图8 CWBLDC电机电动运行时的电路示意图
Fig.8 Circuit diagram of CWBLDC motor in electric mode
16极50槽CWBLDC电机电动运行时,在t0时刻,转子永磁体N极中轴线与第1相绕组中轴线对齐,第1相绕组电流换向。此时如图9a所示,功率开关管H2导通,H1关断,第1相绕组电流反向,其余功率开关的状态不变,图中w 表示转子角速度。
电机转子继续转动,在t1时刻,转子转过八分之一个槽时,转子永磁体S极中轴线与第23相绕组中轴线对齐,第23相绕组电流换向。此时如图9b所示,功率开关管L24导通,L23关断,第23相绕组电流反向,其余功率开关的状态不变。
当转子再次转过八分之一个槽时,在t2时刻,转子永磁体N极中轴线与第20相绕组中轴线对齐,第20相绕组电流换向。此时如图9c所示,功率开关管H21导通,H20关断,第20相绕组电流反向,其余功率开关的状态不变。
由此规律分析,16极50槽CWBLDC电机按照图中所示方向电动运行时,绕组的电流换向顺序为1→23→20→17→14→11→8→5→2→24→21→18→15→12→9→6→3→25→22→19→16→13→10→7→4→1,功率开关管的导通时序为(H1,L5,H8,L11,H14,L17,H20,L23)→(H2,L5,H8,L11,H14,L17,H20,L23)→(H2,L5,H8,L11,H14,L17,H20,L24)→(H2,L5,H8,L11,H14,L17,H21,L24)→…→(H1,L4,H8,L11,H14,L17,H20,L23)→(H1,L5,H8,L11,H14,L17,H20,L23)。
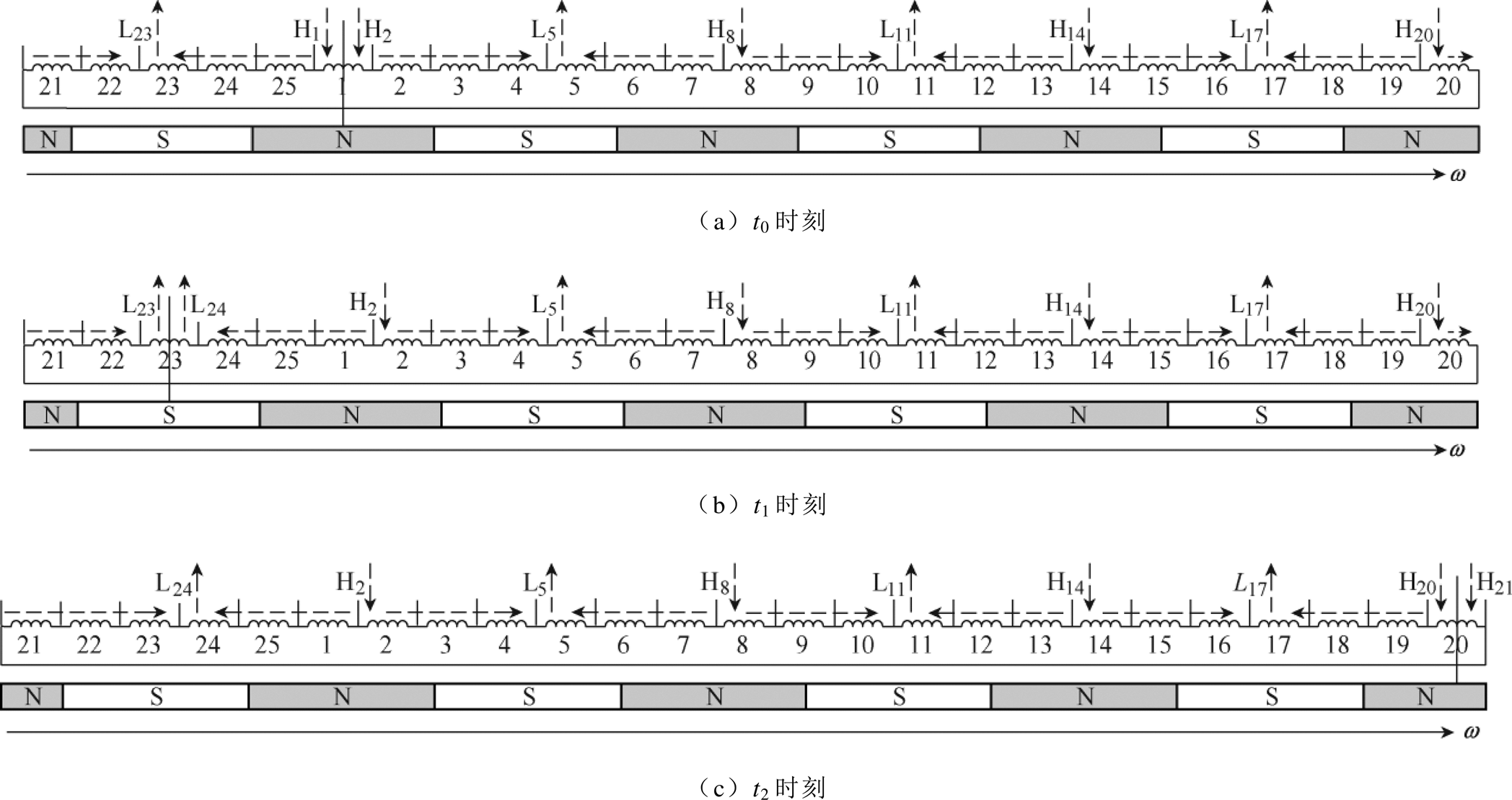
图9 电动运行分析
Fig.9 Analysis of positive rotation
当转子永磁体N极中轴线与第i相绕组(i=1, 2,…, 25)中轴线对齐时,第i相绕组反电动势由正到负过零;当转子永磁体S极中轴线与第i相绕组中轴线对齐时,第i相绕组反电动势由负到正过零。因此当CWBLDC电机正转电动时,绕组反电动势与功率开关管的导通关断关系如图10所示。在t0时刻,第1相绕组反电动势由正到负过零,功率开关管H2导通,H1关断;当第1相绕组反电动势由负到正过零时,功率开关管L2导通,L1关断。其他相绕组换向时功率开关器件的导通关断与绕组反电动势的关系与此类似,并且每个开关管导通a = 8p/25电角度,每个H桥的上管和下管导通相差p 电角度。
16极50槽CWBLDC电机反转电动运行时,分析过程与正转电动运行相似,绕组电流换向顺序为1→4→7→10→13→16→19→22→25→3→6→9→12→15→18→24→24→2→5→8→11→14→17→20→23→1,且在相同的转子位置绕组电流与正转电动时相反,因此得到电机反转电动时的功率开关管的导通时序为(L1,H5,L8,H11,L14,H17,L20,H23)→(L1,H4,L8,H11,L14,H17,L20,H23)→…→(L2,H5,L8,H11,L14,H17,L21,H24)→(L2,H5,L8,H11,L14,H17,L20,H24)→(L2,H5,L8,H11,L14,H17,L20,H23)→(L1,H5,L8,H11,L14,H17,L20,H23)。
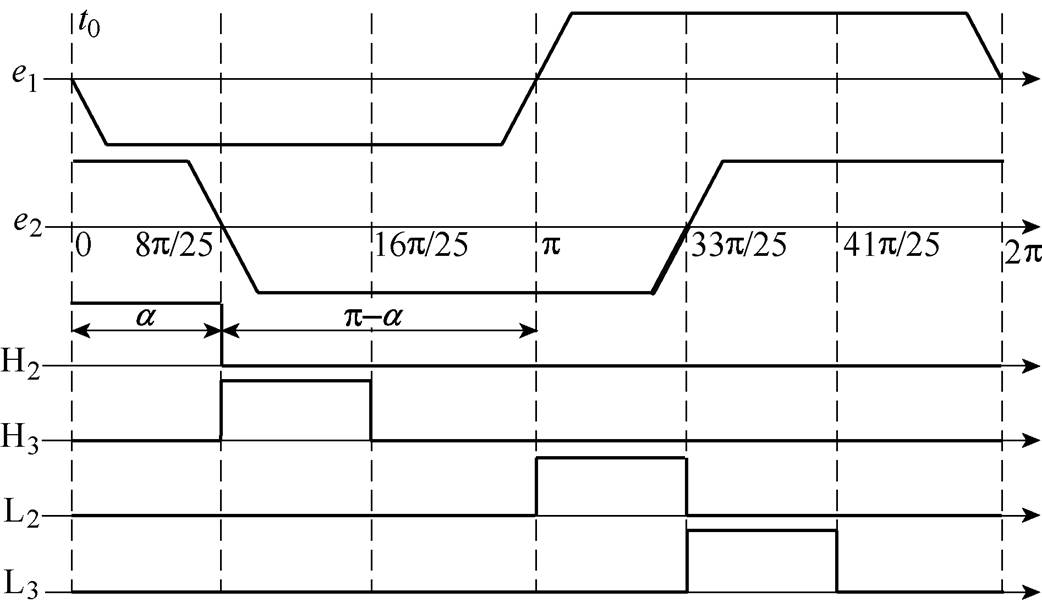
图10 反电动势与开关导通关系示意图
Fig.10 Relationship between back-EMF and switch state
根据前面的正转和反转分析,可以得到16极50槽CWBLDC电机的开关时序表。
CWBLDC电机在制动运行时,电机工作在发电状态,机械能转化为电能。传统直流电机的快速反接制动是通过倒向开关,将绕组两端反接到电网上,让绕组两端电压反向并同时接入限流电阻,此时绕组反电动势和绕组两端电压同向,因而可以产生较大的反向电流,随之产生很大的制动转矩,使电机停转[17];而CWBLDC电机采用可控功率开关取代换向电刷,且每个功率开关均并联有反向二极管,因此直接将绕组两端反接到电网会使电路短路。如果通过控制功率开关的方式,使电机绕组两端的电压反向,如制动时使开关导通状态由(H1,L5,H8,L11,H14,L17,H20,L23)变为(L1,H5,L8,H11,L14,H17,L20,H23),与直接反接制动类似,需要在制动时接入限流电阻,增加了电路的复杂程度和控制难度,所以也不适用。CWBLDC电机结构不同于传统永磁电机,相数较多,采用非PWM的控制方式,所以传统永磁电机的制动方式不能完全适应于CWBLDC电机的制动[18-21]。文中提出一种简单的能耗制动控制方式,将电机转子制动的能量一部分消耗在电机本身,一部分消耗在制动电阻Rbrk上。
制动过程中,断开功率开关SH,斩波电路不工作,此时开关SL、二极管VDH和电感L1构成升压电路。换向电路功率开关管处于不控状态(或全断开状态),由于换向电路中反向并联二极管的作用,电机处于不控整流的发电状态。制动开关Sbrk导通,Sbrk与制动电阻Rbrk组成制动耗能电路。其电路结构如图11所示。
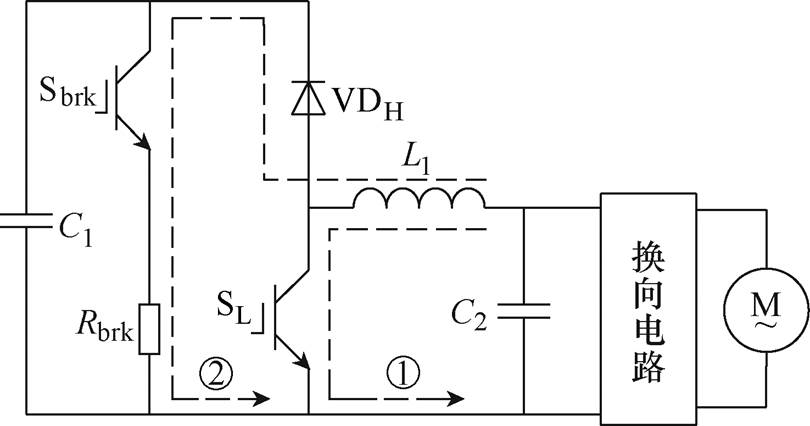
图11 CWBLDC电机制动运行时的电路示意图
Fig.11 Circuit diagram of CWBLDC motor in braking mode
制动时,控制功率开关SL的导通与关断,当SL导通时,制动电流方向为电机→L1→SL→电机,如图11中虚线①所示,此时电机机械能通过自身内阻消耗;当SL关断时,制动电流方向为电机→L1→VDH→Sbrk→Rbrk→电机,如图11中虚线②所示,此时电机机械能通过电阻Rbrk消耗。
当SL导通时,等效电路如图12a所示。
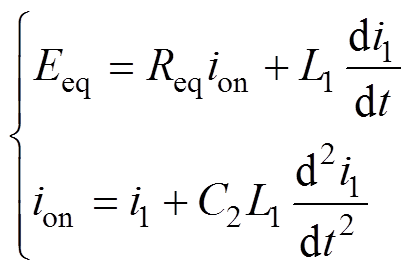 (1)
(1)当SL关断时,等效电路如图12b所示。
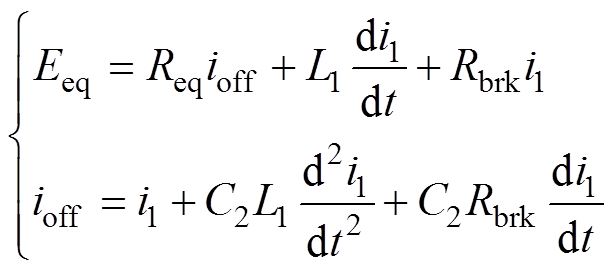 (2)
(2)
式中,Eeq为当电机转速为w 时的等效反电动势;Req为电机绕组和换向电路的等效内阻;ion为SL导通时的制动电流;ioff为SL断开时的制动电流;i1为流过电感L1的电流。
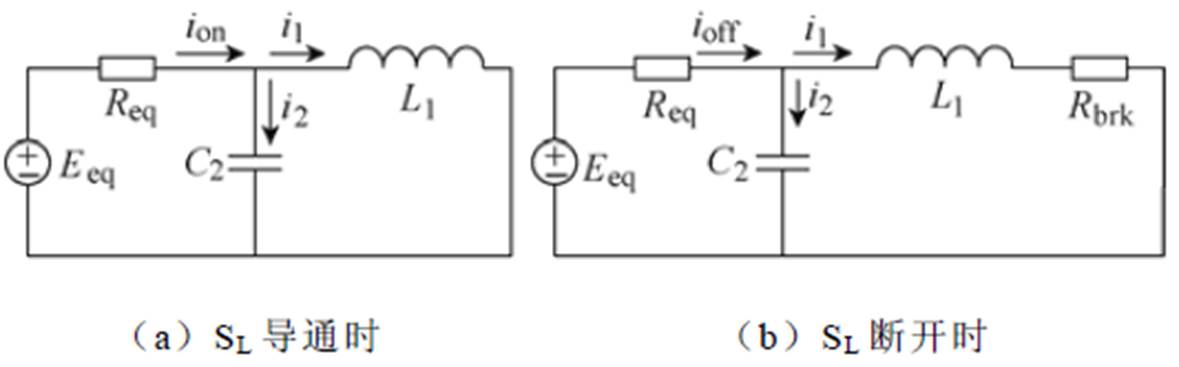
图12 CWBLDC电机制动时的等效电路
Fig.12 Equivalent circuit of CWBLDC motor in braking mode
当SL占空比为D时,稳态时的平均制动电流为
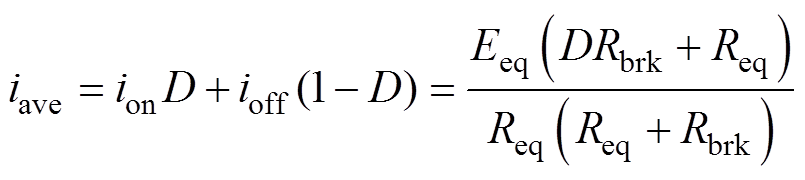 (3)
(3)从式(3)可知,可以通过调节开关SL的占空比,调节电机的平均制动电流,从而控制电机的制动速度。
由前面对于CWBLDC电机正反转及制动方法的分析可知,电机正反转切换时,电机可由电动状态直接进入制动状态。
图13为CWBLDC电机四象限运行示意图,图中阴影部分表示电机的运行范围,第Ⅰ象限为正转电动,第Ⅱ象限为正转制动,第Ⅲ象限为反转电动,第Ⅳ象限为反转制动。
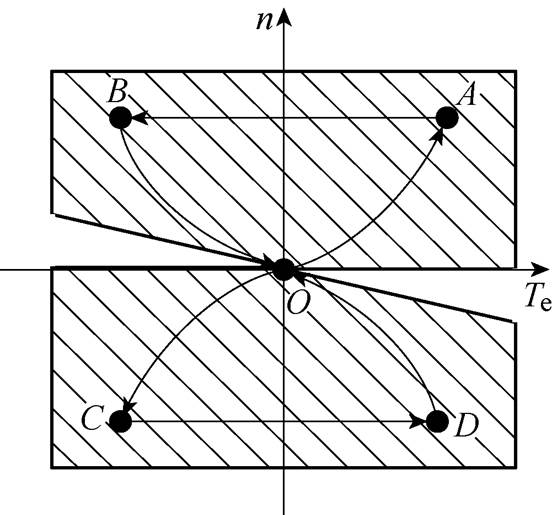
图13 CWBLDC电机四象限运行示意图
Fig.13 Four-quadrant operation of CWBLDC motor
CWBLDC电机四象限运行过程如下:电机从O点所示的静止状态,沿曲线OA正转电动加速到A点所示的正转电动稳定状态,再沿AB所示曲线由正转电动进入正转制动状态,制动过程沿BO所示曲线制动到转速转矩为零,然后沿OC所示曲线反转电动加速到C点所示反转电动稳定状态,再沿CD所示曲线由反转电动进入反转制动状态,最后沿DO所示曲线制动到静止状态,即CWBLDC电机沿OA→AB→BO→OC→CD→DO所示路径完成完整的四象限运行过程。
为了验证文中对CWBLDC电机的电动及制动过程的分析,在电路仿真软件PLECS中建立16极50槽CWBLDC电机的仿真模型,对电机的电动过程、制动过程和四象限运行过程进行仿真,并搭建了以一台10kW的16极50槽CWBLDC电机为原理样机的实验平台,如图14所示。
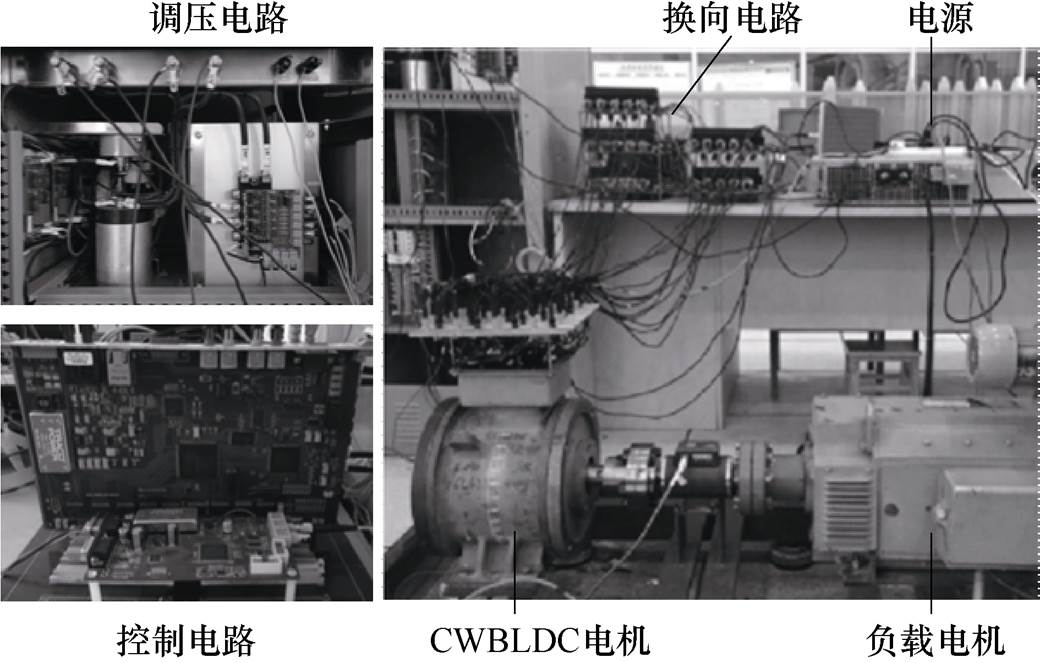
图14 CWBLDC电机实验平台
Fig.14 Experiment platform of CWBLDC motor
为验证对CWBLDC电机电动控制过程的分析,对电机转速为300r/min,负载转矩为36N·m的工况进行仿真,并在实验平台进行实验验证,仿真及实验的结果如图15所示。
图15a是电机母线电流的仿真与实验结果对比,图15b是电机绕组相电流的仿真与实验波形对比,图15c是绕组相电压的仿真和实验波形对比。为了能够更清楚地对比仿真和实验波形,图15b和图15c中的电压和电流波形进行了移位处理,使仿真波形超前实验波形一定电角度。从仿真及实验结果可以看出,在相同的工况下,仿真的母线电流波形、相电流波形和相电压波形与实验的波形基本一致,CWBLDC电机的电动控制方法有效。

图15 电动运行仿真与实验波形对比
Fig.15 Waveform comparison between simulation and experiment in electric mode
为验证CWBLDC电机的制动方法,对CWBLDC电机的制动过程进行仿真和实验。图16和图17分别是电机制动过程的仿真波形和实验波形,图16a是制动电流的仿真波形,图16b是制动过程中的转速变化的仿真波形;图17a是制动电流的实验波形,图17b是制动过程中转速变化的实验波形。
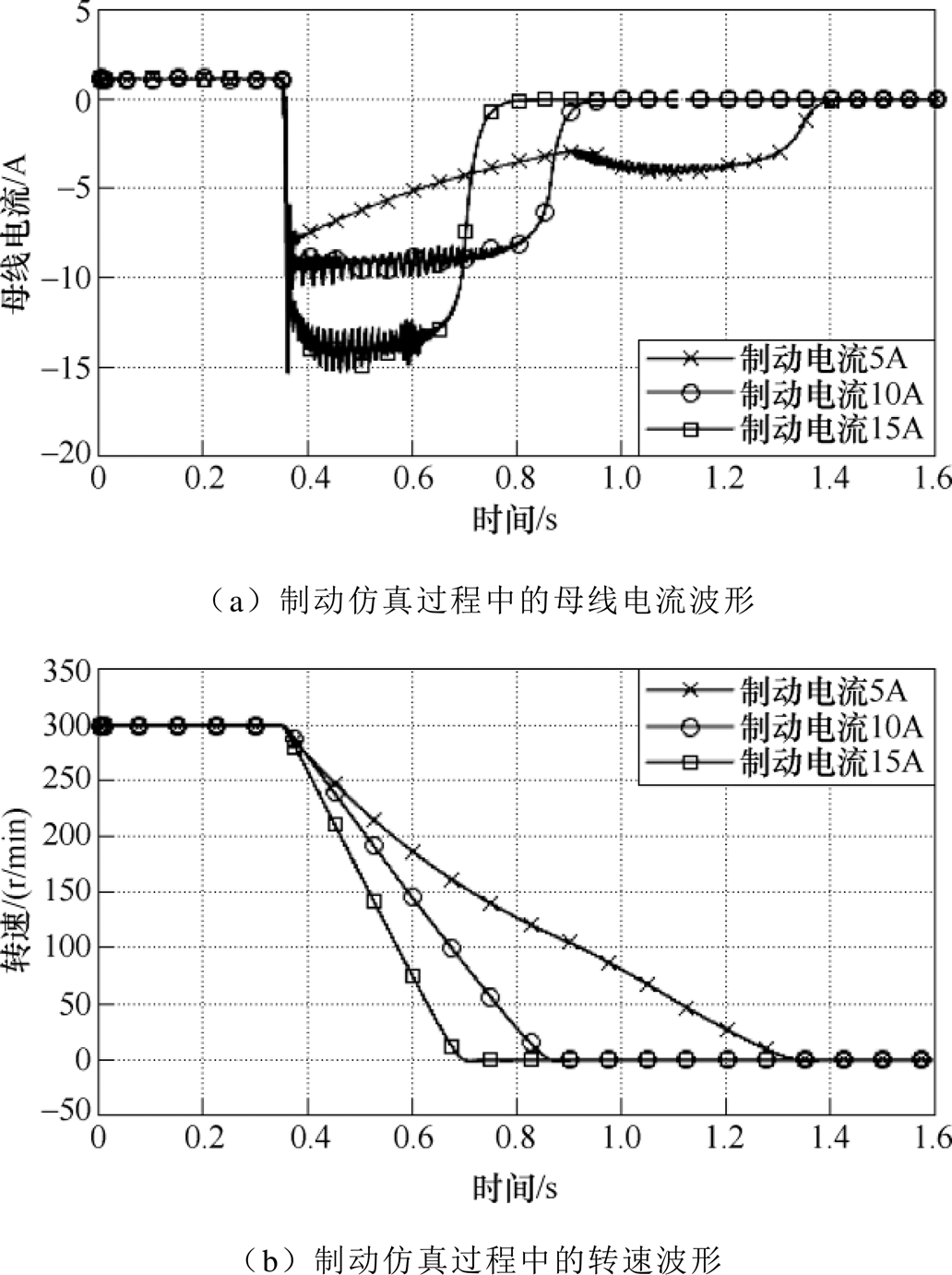
图16 电机制动仿真波形
Fig.16 Simulation waveforms of braking

图17 电机制动实验波形
Fig.17 Experimental waveforms of braking
在仿真和实验过程中,电机制动母线电流阈值分别设置为5A、10A和15A,仿真和实验结果可以证明,驱动电路不控,只控制升压电路占空比的制动方法可以有效实现CWBLDC电机的制动,并且电机的制动电流可控,制动速度可调,制动电流越大,制动速度越快。
图18是电机正反转的实验结果,实验中CWBLDC电机的状态:正转300r/min→正转制动→反转。如图18a中所示,开始时电机正转电动,运行于A点所示稳定状态,当电机进入正转制动状态后,沿曲线BO制动到静止,再沿曲线OC反转电动加速;图18b和图18c为这个过程中母线电流和转速的波形。在制动的过程中,直流电源被断开,制动结束后,再次上电,因此实验中有给电容充电的过程。实验结果证明,CWBLDC电机的正转、制动和反转驱动均可行,可以实现CWBLDC电机的四象限运行。

图18 电机正反转实验波形
Fig.18 Experimental waveforms of positive-negative rotation
本文根据CWBLDC电机的结构特点,对电机的正转电动、反转电动和制动过程进行分析,并通过仿真和实验对分析结果进行了验证。仿真与实验中,电动过程的电压、电流波形仿真与实验基本一致,制动过程的制动电流可控,实验过程中制动电流较好地跟随了设定的制动电流,电机的正反转运行可实现。通过本文的分析与验证,实现了CWBLDC电机的四象限运行,为促进该新型电机走向实际应用奠定了基础。
参考文献
[1] Li Zhu, Jiang Shuzhong, Jiang Jianzhong, et al. A new simplex wave winding permanent-magnet brushless DC machine[J]. IEEE Transactions on Magnetics, 2011, 47(1): 252-259.
[2] Wang Dong, Lin Huangda, Cheng Siwei, et al. A novel circular winding brushless DC (CWBLDC) machine with low torque ripple[C]//IECON 2015- 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, 2015: 001585- 001591.
[3] 林黄达, 王东, 程思为, 等. 环形绕组无刷直流电机负载换向的解析模型[J]. 电工技术学报, 2017, 32(9): 40-47.
Lin Huangda, Wang Dong, Cheng Siwei, et al. Analytical model of load commutation of the circular winding brushless DC machine[J]. Transactions of China Electrotechnical Society, 2017, 32(9): 40-47.
[4] Lin Huangda, Cheng Siwei, Wang Dong, et al. Load commutation of the circular winding brushless DC machine (CWBLDC)[C]//IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, 2015: 002741-002746.
[5] Zhang Qinghu, Cheng Siwei, Wang Dong, et al. Multiobjective design optimization of high-power circular winding brushless DC motor[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1740-1750.
[6] Cheng Siwei, Zhang Qinghu, Jia Zhewu, et al. Dynamic modeling of the circular winding brushless DC (CWBLDC) machine[C]//2016 IEEE 8th Inter- national Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, 2016: 2545-2550.
[7] 张兰红, 唐慧雨, 何坚强. 基于霍尔位置信号的无刷直流电机直接转矩控制[J]. 电机与控制学报, 2018, 22(9): 56-63.
Zhang Lanhong, Tang Huiyu, He Jianqiang. Direct torque control of brushless DC motor based on hall position signals[J]. Electric Machines and Control, 2018, 22(9): 56-63.
[8] 潘峰, 闫庚龙, 苑伟华, 等. 基于双滑模的永磁同步电机直接转矩控制[J]. 电工技术学报, 2018, 33(增刊2): 427-433.
Pan Feng, Yan Genglong, Yuan Weihua, et al. Research on direct torque control for permanent magnet synchronous motor based on the double sliding mode[J]. Transactions of China Electro- technical Society, 2018, 33(S2): 427-433.
[9] Zhang Xiaoguang, Sun Lizhi, Zhao Ke, et al. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques[J]. IEEE Transactions on Power Electro- nics, 2013, 28(3): 1358-1365.
[10] 张立伟, 李行, 宋佩佩, 等. 基于新型滑模观测器的永磁同步电机无传感器矢量控制系统[J]. 电工技术学报, 2019, 34(增刊1): 70-78.
Zhang Liwei, Li Hang, Song Peipei, et al. Sensorless vector control using a new sliding mode observer for permanent magnet synchronous motor speed control system[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 70-78.
[11] 耿洁, 陈振, 刘向东, 等. 永磁同步电机的自适应逆控制[J]. 电工技术学报, 2011, 26(6): 51-55, 61.
Geng Jie, Chen Zhen, Liu Xiangdong, et al. Adaptive inverse control of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2011, 26(6): 51-55, 61.
[12] 王磊, 李颖晖, 朱喜华, 等. 存在扰动的永磁同步电机混沌运动模糊自适应同步[J]. 电力系统保护与控制, 2011, 39(11): 33-37, 43.
Wang Lei, Li Yinghui, Zhu Xihua, et al. Chaos synchronization of permanent magnet synchronous motor with disturbance using fuzzy adaptive logic[J]. Power System Protection and Control, 2011, 39(11): 33-37, 43.
[13] 夏长亮, 方红伟. 永磁无刷直流电机及其控制[J].电工技术学报, 2012, 27(3): 25-34.
Xia Changliang, Fang Hongwei. Permanent-magnet brushless DC motor and its control[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 25- 34.
[14] 夏长亮, 张茂华, 王迎发, 等. 永磁无刷直流电机直接转矩控制[J]. 中国电机工程学报, 2008, 28(6): 104-109.
Xia Changliang, Zhang Maohua, Wang Yingfa, et al. The direct torque control for permanent magnet brushless DC motors[J]. Proceedings of the CSEE, 2008, 28(6): 104-109.
[15] 刘军, 李金飞, 俞金寿. 无刷直流伺服电机四象限运行分析[J]. 上海交通大学学报, 2009, 43(12): 1910-1915.
Liu Jun, Li Jinfei, Yu Jinshou. Analysis on 4- quadrant operation of brushless DC servo system[J]. Journal of Shanghai Jiaotong University, 2009, 43(12): 1910-1915.
[16] 谭博, 马瑞卿, 刘卫国. 一种永磁无刷直流电动舵机四象限控制[J]. 电工技术学报, 2011, 26(9): 73-79.
Tan Bo, Ma Ruiqing, Liu Weiguo. A four-quadrant control for permanent magnet brushless DC electric actuator[J]. Transactions of China Electrotechnical Society, 2011, 26(9): 73-79.
[17] 汤蕴璆. 电机学[M]. 北京: 机械工业出版社, 2013.
[18] 张寅孩, 葛金法, 汪松松. 基于Bang-Bang最优理论的感应电机能耗制动相轨迹分析[J]. 电工技术学报, 2011, 26(2): 74-80.
Zhang Yinhai, Ge Jinfa, Wang Songsong. Energy- consumed braking phase trajectory of induction motor based on Bang-Bang optimal theory[J]. Transactions of China Electrotechnical Society, 2011, 26(2): 74-80.
[19] 宋哲, 王友仁, 鲁世红, 等. 一种电动车用无刷直流电机混合回馈制动控制方法[J]. 电工技术学报, 2016, 31(6): 74-80.
Song Zhe, Wang Youren, Lu Shihong, et al. A hybrid regenerative braking control method of brushless DC motor for electric vehicles[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 74-80.
[20] 赵国柱, 韩英, 魏民祥, 等. PWM调制方案对无刷直流电机电动汽车再生ABS的影响[J]. 重庆大学学报, 2014, 37(2): 31-36, 45.
Zhao Guozhu, Han Ying, Wei Minxiang, et al. Effect of the PWM modulation scheme on the regenerative anti-lock braking system of the electric vehicle driven by apermanent magnet brushless DC motor[J]. Journal of Chongqing University, 2014, 37(2): 31-36, 45.
[21] 王晓远, 傅涛. 基于模型预测控制策略的电动车用无刷直流电机回馈制动的研究[J]. 电工技术学报, 2017, 32(9): 16-23.
Wang Xiaoyuan, Fu Tao. Constant current regener- ative brake in BLDCM for electric vehicle based on model predictive current control strategy[J]. Transa- ctions of China Electrotechnical Society, 2017, 32(9): 16-23.
Analysis on 4-Quadrant Operation of Circular Winding Brushless DC Motor
Abstract Circular winding brushless DC motor has the similar structure with brush DC motor. The stator windings are connected in a ring and the commutator is made up of controllable power switch. The rotor is permanent magnet. Because of the particularity of structure, the drive methods of conventional permanent magnet motor can’t be applied to circular winding brushless DC (CWBLDC) motor directly. Therefore, 4-quadrant operation of CWBLDC motor is analyzed in detail based on the structure of CWBLDC motor. The system of CWBLDC motor is introduced at first, then the sequence control of the drive circuit in forward and reverse mode is studied. After that the braking process and the controllability of braking current are analyzed. The simulation of the motor process, braking process and forward-reverse process is carried out, and an experiment platform for CWBLDC motor is set up. The simulation and experimental results indicate that the analysis in electric mode is correct and the braking method is effective, which can achieve the 4-quadrant operation of CWBLDC motor.
keywords:Circular winding brushless DC motor, motor operation, braking, 4-quadrant operation
中图分类号:TM351; TM33
DOI: 10.19595/j.cnki.1000-6753.tces.190917
国家自然科学基金重大项目(51690181),国家自然科学基金杰青项目(51825703)资助。
收稿日期 2019-07-25
改稿日期 2019-11-24
贾喆武 男,1990年生,博士研究生,研究方向为永磁电机及其控制技术。E-mail: jiazhewu2009@hotmail.com
王 东 男,1978年生,教授,博士生导师,研究方向为电力推进、独立电源系统等。E-mail: wangdong@vip.sina.com(通信作者)
(编辑 赵 鹏)