图1 Z源逆变器拓扑结构
Fig.1 Structure of Z-source inverter
摘要 该文提出一种Z源逆变器直流链电压的控制策略及其实现方法。为了扩大高速永磁电机的运行范围,提高供电效率,需要依据电机运行状态实时地控制Z源逆变器的直流链电压。该文提出的策略不仅考虑电机稳态时的直流链电压,还设计动态升压曲线并采取相应的非线性控制器保证实施效果。这种控制策略统一协调了直通占空比和调制度这两个主要控制量,因此在实现电压的快速跟踪与降低损耗的同时,也保证了系统的稳定性。另外,为了保证控制策略的实施效果,该文采用一种基于电容电压间接控制的模糊PI控制系统来控制直流链电压。这种控制方式很好地抑制给定突变或负载突变引起的系统波动。此外,该策略还可以应用于各种常规的电压型Z源逆变器的脉宽调制策略。实验验证了该策略的有效性。
关键词:电力驱动 高速永磁电机 模糊控制 协调控制 Z源逆变器
高速永磁电机具有体积小、功率密度高、噪声小、系统传输效率高等特点,因此在高速磨床、空气循环制冷系统、高速发电、燃料电池等领域具有广阔的应用前景[1-2]。然而当高速电机运行时,它的转速范围和电压范围都很大,因此对供电装置有很高要求。逆变器应在大电压和频率范围内,高效、稳定地向电机供电[3-4]。
Z源逆变器是一种高可靠性、高可用性的逆变器,它通过在直流电源和全桥逆变器之间插入一个X形的阻抗网络,实现了更大范围的输出电压和频率。这种新型逆变器可以突破调制度对输出电压的限制,因此受到了广泛的关注[5-6]。由于将Z源逆变器引入到交流电机调速系统中可以使电机更灵活和高效地运行,因此在电气传动系统中应用这种新型逆变器逐渐成为一个研究热点[7-9]。
在传统的交流调速系统中,由于直流侧电源或者整流电路的限制,交流侧输出电压存在输出上限,这使得电机的性能潜力不能得到充分发挥。此外,电源电压骤降等故障还会使得电机运行被切断,控制过程中断,严重影响调速系统的正常运行[10-11]。而Z源逆变器理论上可以输出任意大小的交流电压,满足高速电机的运行要求,使电机满负荷工作。
高速永磁电机的电压在不同转速下变化很大,而使用Z源逆变器交流调速系统对高速电机进行供电可以使电机在较大的转速范围内安全有效地运行。在实际应用中,当电机进入弱磁区时,弱磁电流会导致电机失稳,容易引起故障,损坏设备[12]。Z源逆变器可以提高电压范围,扩大电机的工作范围,在一定程度上避免电机进入弱磁区。但是在高速电机驱动方面,特别是在扩展工作区等领域,对Z源逆变器的研究却很少。虽然常规的控制方法可以拓展到Z源逆变器系统中使用,但这些方法不能满足高速电机在宽调速比和多工况下运行的要求[13]。
在传统的控制方法中,直流链电压和输出电压由直通占空比和调制度分别控制,因此不能对整个控制系统进行协调控制,从而使得系统的稳定性无法得到保证。为了降低电机运行中的电压应力,提高电压利用率,文献[14]提出了一种结合直通占空比和调制度的控制技术。然而,这种技术只考虑了电机稳态运行时的情况,没有考虑电机在较宽电压和速度范围内加速和减速运行的动态情况。
为了使Z源逆变器在运行时的每一稳态和稳态间的动态过程中都具有合理的电压利用率和效率,本文提出了一种新的Z源逆变器直流链电压控制策略。该策略协调直通占空比和调制度两个变量,计算最优电压曲线,实现宽范围内的电压优化控制。由于该策略选择了空间曲面的短程线,因此电压上升速度快,开关损耗小。这种控制技术具有很好的通用性,可以实现任意电压间的最佳升降。此外,几乎所有传统的电压逆变空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)策略都可以应用于该技术。
直通占空比到直流链电压之间传递函数是非线性的,并且存在一个右半平面零点,是一个非最小相位系统[15]。因此使用PI控制器的Z源逆变器控制系统的跟随性能很差。而为了实现上述的控制策略,需要直流链电压稳定地跟随给定值。本文使用一种模糊PI控制器保证了提出策略的有效实施。
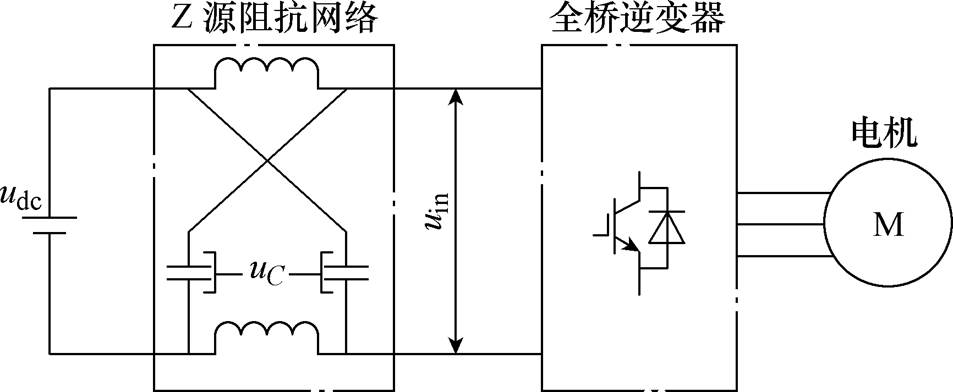
Z源逆变器由Z源阻抗网络和全桥逆变电路组成,其拓扑结构如图1所示。通过在普通逆变器的常规脉宽调制控制中增加直通零矢量,Z源阻抗网络交替充放电,提高了阻抗网络的输出电压,阻抗网络输出电压也被称为直流链电压uin。Z源的阻抗网络可以看作是与全桥逆变器耦合控制的升降压电路。
图1 Z源逆变器拓扑结构
Fig.1 Structure of Z-source inverter
阻抗网络有直通状态和非直通状态两种状态。区分方式为:在全桥逆变器中,是否有一相桥臂的上下两个开关管同时导通,若存在这样的直通桥臂,则称此时Z源逆变器处于直通状态,否则称之为非直通状态。在直通状态下,由于Z源逆变器交流测短路,其直流链电压为零,即uin=0。而在非直通状态下,Z源逆变器uin的直流链电压可写为
 (1)
(1)式中,d0为零矢量直通占空比;B为Z源阻抗网络的放大系数。
因此,使总增益G满足G=mB,可以得到
 (2)
(2)式中,m为调制度。
简单升压控制(Simple Boost Control, SBC)、最大升压控制(Maximum Boost Control, MBC)、最大固定升压控制(Maximum Constant Boost Control, MCBC)和改进的SVPWM(Modified SVPWM, MSVPWM)控制等方式是Z源逆变器主流的脉冲调制方法。在这些方式中,m和d0之间的约束关系是类似的,见表1。本文以SBC为例,推导了Z源逆变器应用于高速永磁电机驱动系统时的直流链电压控制策略。
表1 不同调制策略中m与d0之间的限制关系
Tab.1 Restrictive relationship between m and d0 of various of PWM modulation strategies
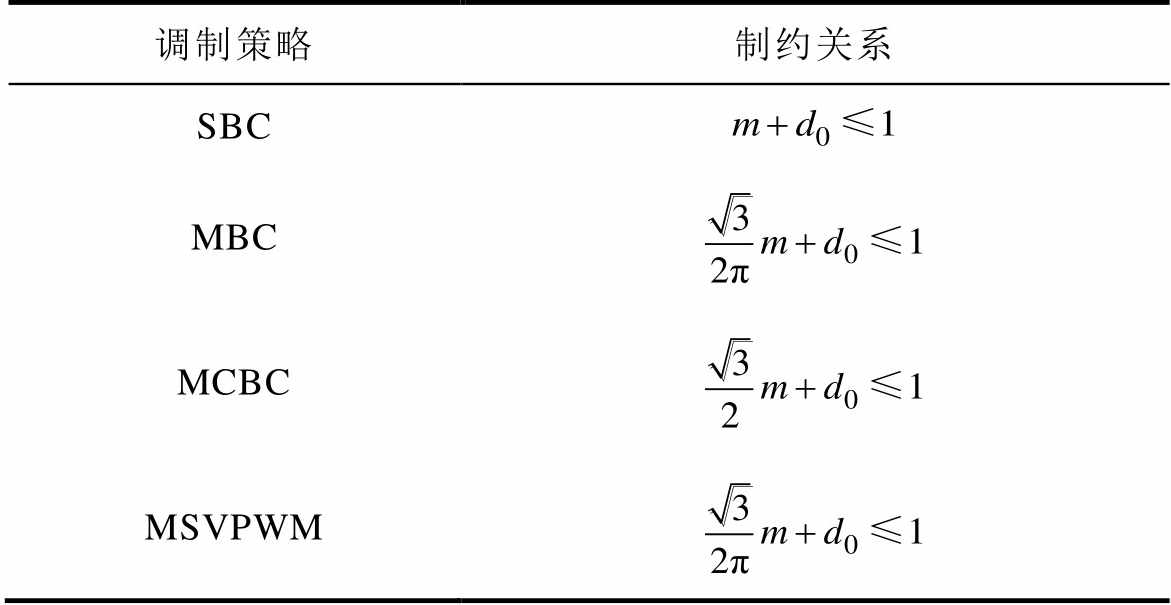
调制策略制约关系 SBC MBC MCBC MSVPWM
随着电机转速的提高,Z源逆变器的输出电压也不断升高,而在常规控制方式下,直流链电压会保持恒定,直到调制度m逐渐增加到略小于1-d0的值,此时由于m和d0之间的制约关系,调制度无法继续增大。固定的直流链电压使得输出电压无法继续增大,因此电机若要加速到更高的速度,只能使用弱磁控制。同时,直流链电压的通常设置为满足电机最高转速下的电压要求,这会导致电机低转速时逆变器的效率降低。
假设直流电源电压恒定且无波动,将m=1−d0代入式(2)可得
 (3)
(3)式(3)的量之间关系如图2所示,可见,当m→0.5时,有G→∞;而当m→∞时,则有G→0.5。由于G不能为负,所以m必须大于0.5。图2还表明,在相同的电压增益下,较小的m会导致较大的d0。这表明,若一直将d0固定在较高的值上,那么在电机起动时,由于输出电压很小,m会很小,无疑会降低逆变器的效率。
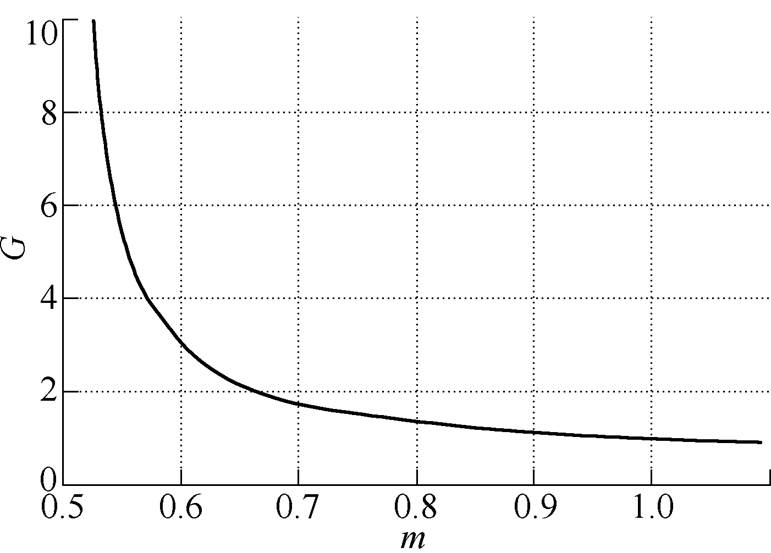
图2 最大增益G与调制度m的关系
Fig.2 Relationship between the G and m
一般对Z源逆变器的控制方式与两级式逆变器相同,首要考虑保证直流侧电压的稳定。这是由于稳定的直流侧电压可以保证逆变器有效地输出交流。在这种方法中,直流链电压的值取决于所采用的调制策略和所需的输出电压。而为了减少损耗和开关应力,一般倾向于选择较小的直流链电压和较大的调制度。然而,当高速永磁电机从稳态工作点加速到更高的转速时,会由于直流链电压较小,而不能满足更高的电压输出,这时一般要采用注入d轴电流的弱磁控制。而在实际应用中,永磁电机的弱磁控制极易引起系统不稳定。因此考虑扩大逆变器输出电压范围,避免电机进入弱磁区。这就需要提高直流链电压。由于设备不能停机并从更高的直流链电压关机重起,因此考虑直接在直流链电压和调制度的限制下增加输出电压。此时由于m和d0之间的制约关系,只有降低调制度增大直通占空比,才能增大直流链电压。目前针对这种情况的研究较少,需要一种有效的控制策略来解决Z源逆变器在较大输出电压范围内运行的问题。
为了获得在直通占空比和调制度相互约束情况下的电压控制方案,图3给出式(2)中制约关系的三维曲线。其中,表面为总增益G,两个垂直面分别为d0=0.5和d0+m=1。
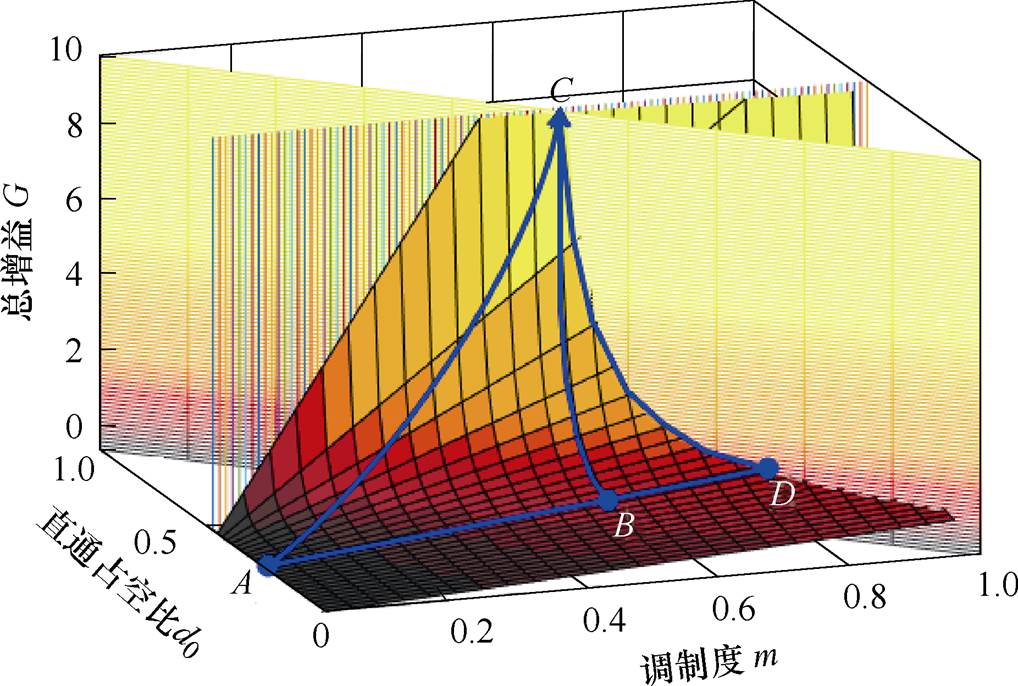
图3 最大增益与调制度、直通零占空比的关系
Fig.3 Relationship between G, m and d0
在传统策略中,电机在固定的d0下运行,如图3中的线段AD。但是在本文提出的策略中,直流链电压也随着电机的运行而在不断变化。需要注意的是,在电机刚起动时,直流电压必须设置为比电源电压稍大一点的值,直到该直流链电压不能满足逆变输出的需要。这种方法在图3中可以被表示为固定电压下的线段AD和变化电压下的短程线DC。另外,如果电机从零起动而不是从某一稳态运行点加速,将会选择短程线AC。此时,Z源逆变器始终具有最大的增益和最优的效率。
由于在电机运行中切换点B很难找到,因此本文没有选择线段AB-BC作为电压曲线。而且为了最大化利用电压,电机的稳定工作点一般在D点。另一个原因是,线段AB-BC下的直流链电压仍然相对较高。
从图3中还可以看出,满足所需电压增益的一系列G构成了一条曲线,这表明存在多个相同增益的工作点。而考虑到电压利用率和开关器件电压应力,本文选择了满足最大增益并与平面d0+m=1相关的交点作为运行点。为了找到式(2)曲面上的最短曲线的方程,本文首先对空间曲线线段的长度进行了推导。三维空间曲线的长度为
 (4)
(4)为了获得使式(4)中积分最小时的曲线方程,取y=B(m),z=G(m),并选择目标函数为

 (5)
(5)其欧拉-拉格朗日方程为
 (6)
(6)
式(6)还可以被写成为
 (7)
(7)而式(7)的通解为
 (8)
(8)
将曲线的起点A(B1,m1)和终点C(B2,m2)代入式(8)可以得到式(8)中a和b的值。此时,空间曲面上的短程线方程就已经得到了。
但是由于式(8)作为超越方程过于复杂,为了更好地应用于实际应用中,本文将em和e-m在m=m1处泰勒展开代入式(8),并进行了简化,有
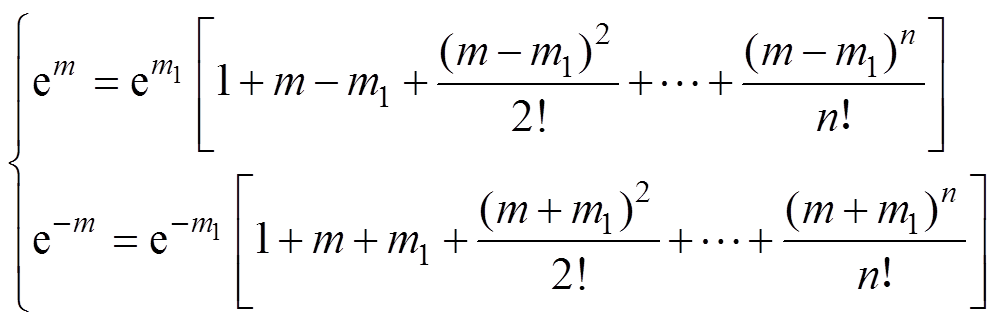 (9)
(9)由于m和m1的差值很小,这里仅选用泰勒级数的前两项作为泰勒多项式。之后将式(8)代入到式(2)中,进行一些简单的计算,可以得到
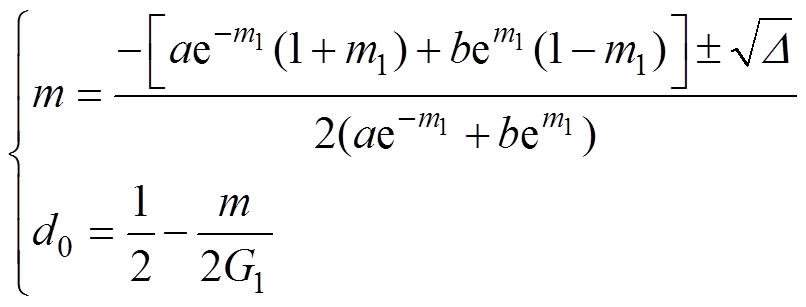 (10)
(10)
式中, ;m1为起点的调制度;G1为起点的Z源逆变器增益。
;m1为起点的调制度;G1为起点的Z源逆变器增益。
取方程在第一象限的解,就得到了下一时刻的m与d0的值,因此逆变器向着计算得到的新工作点运行。而在下一时刻逆变器又有了新的起点,m1和G1的值就这样不断地被更新。Z源逆变器便可以不断地获得下一时刻的运行点。这样直流链电压就可以随着电机的运行而实时变化。
当得到所需的输出电压uaref、ubref和实际输出电压ua、ub 后,式(10)将给出最佳的m和d0。过程如下:由这四个电压uaref、ubref、ua、ub 可以得到对应状态下的调制度mabref、mab,直通占空比d0abref、d0ab 以及对应的电压放大系数Babref、Bab 和电压增益Gabref、Gab。此时将mabref、mab、Bab、Babref代入式(8)可以得到a和b的值。
令式(10)中的变量等于当前时刻的状态量,即令m1=mab,G=Gab,则可以得到下一时刻需要输出的mref*和d0*分别为
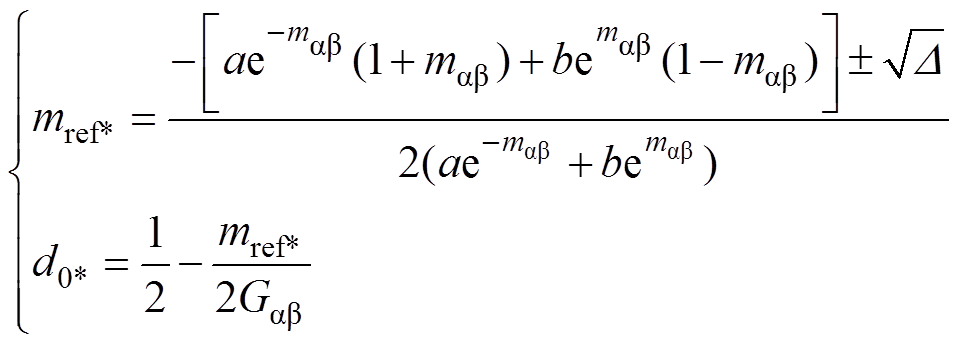 (11)
(11)以电机的矢量控制为例,图4给出了这种控制方式的控制框图。主流的控制技术如直流链恒压控制、电容电压控制、间接单周电流控制、比例谐振控制、电感电流控制等都可以应用本文所提出的控制策略。而且由于m和d0之间制约关系的相似性,这种电压控制技术可以应用于各种脉宽调制策略中。
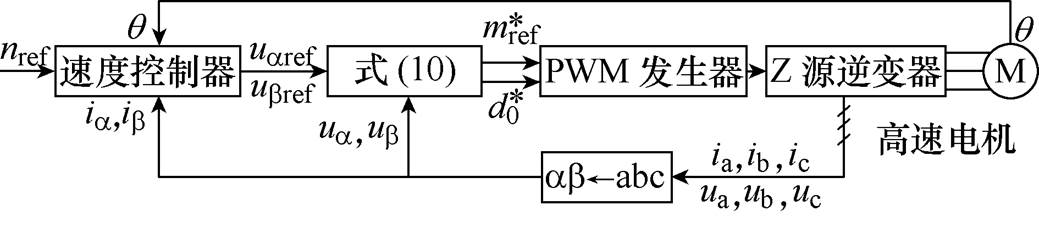
图4 Z源逆变器控制策略框图
Fig.4 Diagram of the control strategy for Z-source inverter
为了保证上述电压策略的有效实施,本文设计了基于模糊PI控制器的直流链电压间接控制系统。直通占空比到直流链电压之间传递函数是非线性的,并且存在一个右半平面零点,是一个非最小相位系统,因此直流链电压的跟随性能很差。而为了实现上述的控制策略,需要直流链电压稳定地跟随给定值,因此需要一种有效的控制技术。
直流链电压的控制性能取决于系统的传递函数,因此需要首先推导出从直通占空比到直流链电压的传递函数。忽略电感和电容中的电阻,用小信号模型可以推导传递函数G(s)[16]为
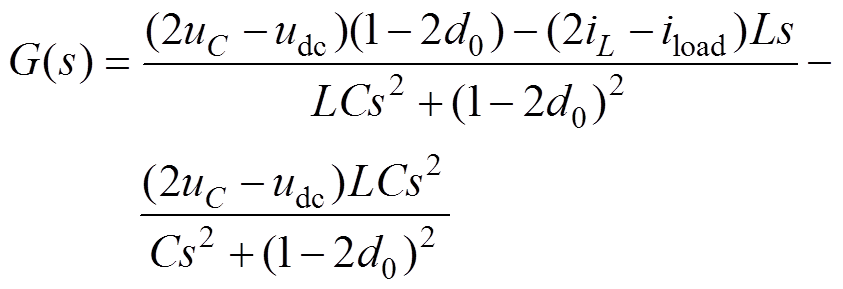 (12)
(12)式中,iL为阻抗网络中电感的电流;iload为Z源阻抗网络在非直通状态下的平均输出电流;L和C为阻抗网络的电感和电容。
由此可见,传递函数具有右半平面零点(Right Half-plane Zero, RHZ)为非最小相位系统。并且随着直通占空比的增大,这个零点不断地向虚轴移动。但在实际应用中,当Z源逆变器处于直通状态时,直流链电压uin=0。直流链电压的这种脉动性使得对它的测量十分困难。
更成熟的策略是采取对电容电压进行控制,从而间接地控制直流链电压。这是一种更为简单的控制方法,这是由于电容电压可以表示为
 (13)
(13)当逆变器处于非直通状态时有
 (14)
(14)
由于直流链电压与电容电压之间的关系已经得到,因此可以通过对电容电压的控制来间接控制直流链电压。类似地,从直通占空比到电容电压的传递函数可以表示为
 (15)
(15)可以看到,在相同的直通占空比d0情况下,电容电压间接控制下的非最小相位现象更弱[16]。再加上测量困难,直流链电压的闭环控制系统通常采取的都是电容电压间接控制。在间接控制中,直流链电压的参考值首先被转换为电容电压的参考值。
为了虚弱右半平面零点和非最小相位系统的影响,本文设计、使用了模糊PI控制器。模糊控制器作为一种非线性控制器,可以很好地满足对Z源逆变器直流链电压的控制需求。
模糊PI控制器由模糊化、模糊规则和解模糊化组成。输入变量采用计算得到给定直流链电压与实际直流链电压的差值及其积分,输出变量是内环电感电流的给定信号。参考普遍采用的模糊子集和模糊化等级,本文首先将模糊子集划分为:负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)。
采用Mamdami推理法作为模糊推理,这样模糊规则可以表示为
IF e is NB and ec is NB, then u is NB.
IF e is NS and ec is NB, then u is NM.
……
其中,e和ec为输入误差与输入误差变化率;u为模糊控制器的输出量。按经验,设计了模糊控制器中的控制规则,见表2。
表2 模糊控制器中的控制规则
Tab.2 Control rules in fuzzy controller
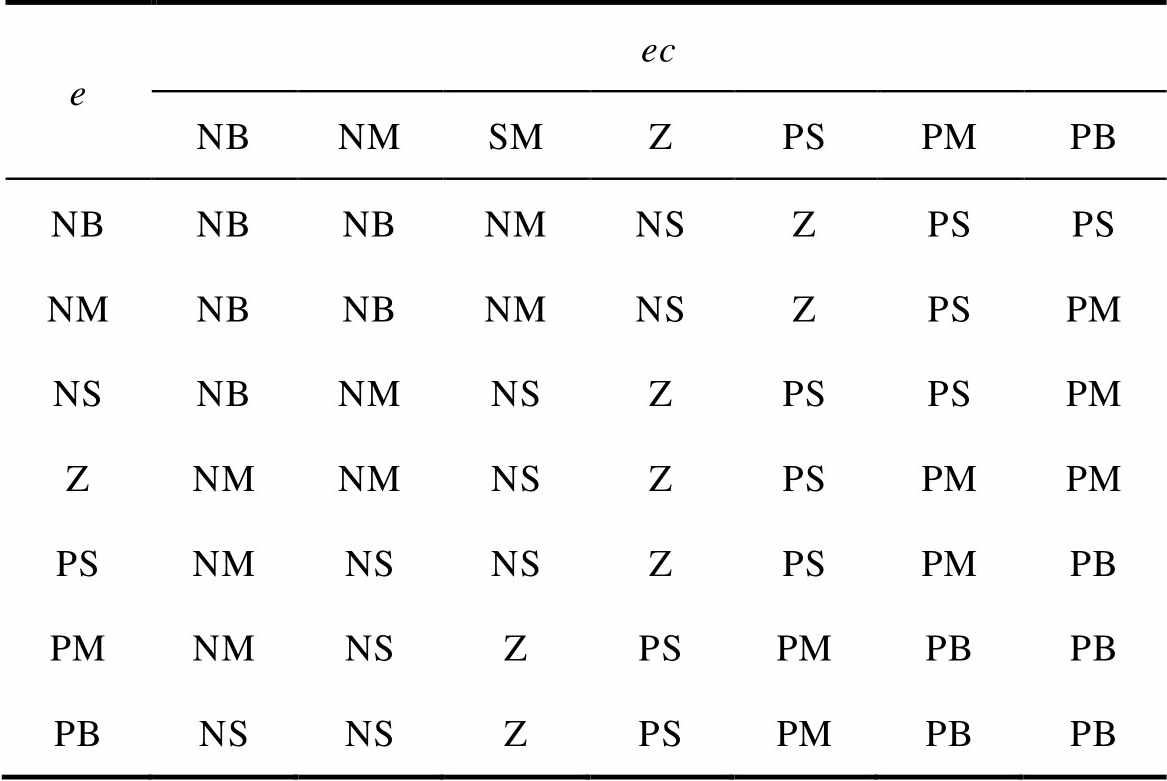
eec NBNMSMZPSPMPB NBNBNBNMNSZPSPS NMNBNBNMNSZPSPM NSNBNMNSZPSPSPM ZNMNMNSZPSPMPM PSNMNSNSZPSPMPB PMNMNSZPSPMPBPB PBNSNSZPSPMPBPB
经过模糊推理得到的控制输出量还是模糊量,不能直接用于控制对象。因此要经过反模糊化转化为精确量。本文使用的面积重心法解模糊化方法为
 (16)
(16)式中,vo为输出值;mv为隶属函数;v为模糊元素。
直流链电压控制器结构如图5所示,其中电容电压的参考值 是利用上一时刻控制系统给出的d0计算得出的。控制器中增加了电感电流作为内环控制器,由于内环相对简单,控制器仅使用比例控制来实现。电容电压的参考值可以由给定的直流链电压和上一时刻输出的直通占空比确定。将电容电压参考值与实际值之间的误差及其微分送入模糊PI控制器。最后,模糊PI控制器得到电感电流的参考值。而参考值与实际电流经过比例控制器就可以得到直通占空比。
是利用上一时刻控制系统给出的d0计算得出的。控制器中增加了电感电流作为内环控制器,由于内环相对简单,控制器仅使用比例控制来实现。电容电压的参考值可以由给定的直流链电压和上一时刻输出的直通占空比确定。将电容电压参考值与实际值之间的误差及其微分送入模糊PI控制器。最后,模糊PI控制器得到电感电流的参考值。而参考值与实际电流经过比例控制器就可以得到直通占空比。

图5 直流链电压控制器结构
Fig.5 Structure of DC-link voltage controller
如此设计的控制器可以保证Z源逆变器直流链电压的跟随性能,从而保证电压控制策略的实施。基于Z源逆变器的调速系统控制流程如图6所示,主要的控制方式为电机转速控制。图6中给出的电机速度控制器,其内部为电机矢量控制。在电机矢量控制中,输出的uaref、ubref可以直接输入到PWM发生器中,实现对逆变器的控制。但在本文所提Z源逆变器控制方式中,这两个信号与此时的逆变器输出电压ua、ub以及直流链电压uin一起送入控制器。经过控制器的计算,得到了下一时刻的控制信号 、
、 和
和 。给定信号、被直接输入到PWM发生器,而则被送入直流链电压控制器,并通过对电容电压的间接控制得到直通占空比d0。在直流链控制器中,首先计算参考电容器电压,再经过模糊PI控制器以及电感电流控制器就可以得到所需的直通占空比d0。
。给定信号、被直接输入到PWM发生器,而则被送入直流链电压控制器,并通过对电容电压的间接控制得到直通占空比d0。在直流链控制器中,首先计算参考电容器电压,再经过模糊PI控制器以及电感电流控制器就可以得到所需的直通占空比d0。
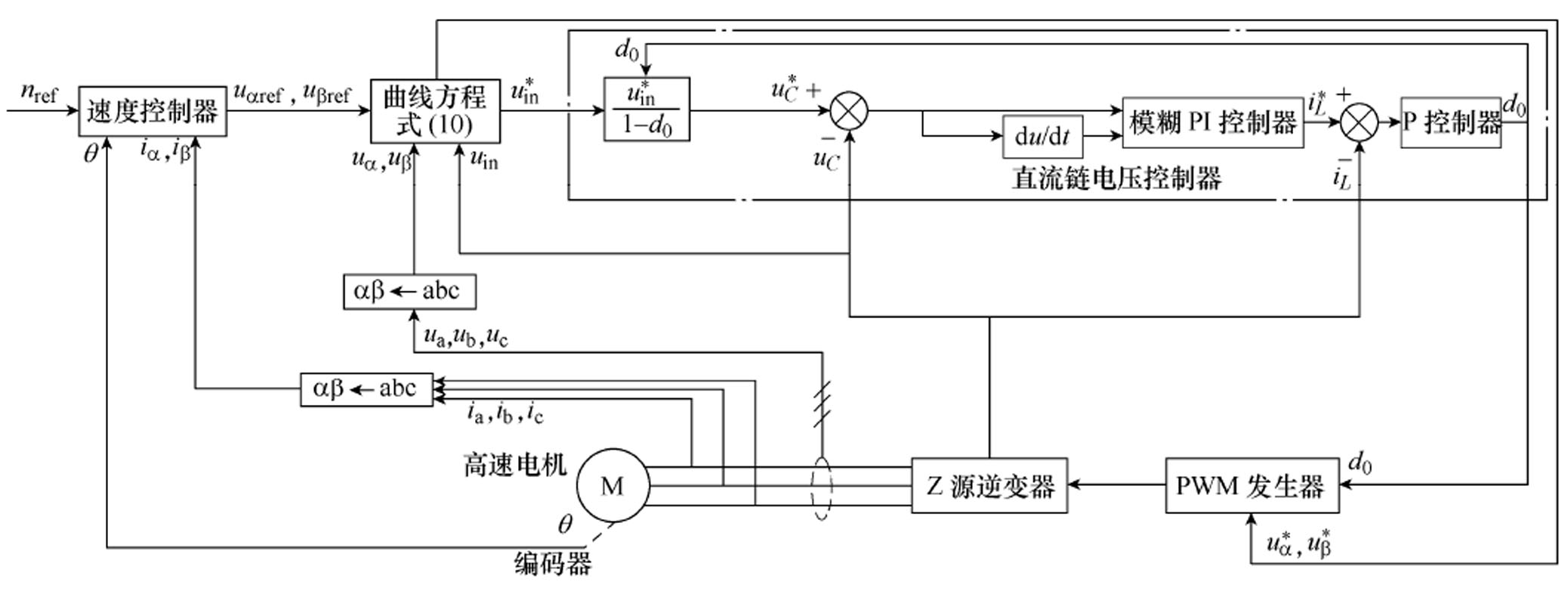
图6 系统控制流程
Fig.6 Diagram of control system
为了验证所提出直流链电压控制方法的有效性,本文进行了实验。永磁电机参数见表3,Z源阻抗网络参数为L=5mH,C=800mF,直流电源电压为400V。电机额定转速为8 000r/min,实验中电机可最大加速至12 000r/min。电机起动前,Z源逆变器的直流链电压已经稳定在420V,此时电容电压为410V。
图7为所搭建的Z源逆变器实验平台,平台使用了两个电抗器、电容器与一个全桥逆变器搭建了Z源逆变器。使用一个大功率可变电压的直流电源作为直流电压源。平台使用了另一台永磁同步电机进行对拖,并作为电机负载。
表3 永磁电机参数
Tab.3 Parameters of the permanent magnet motor
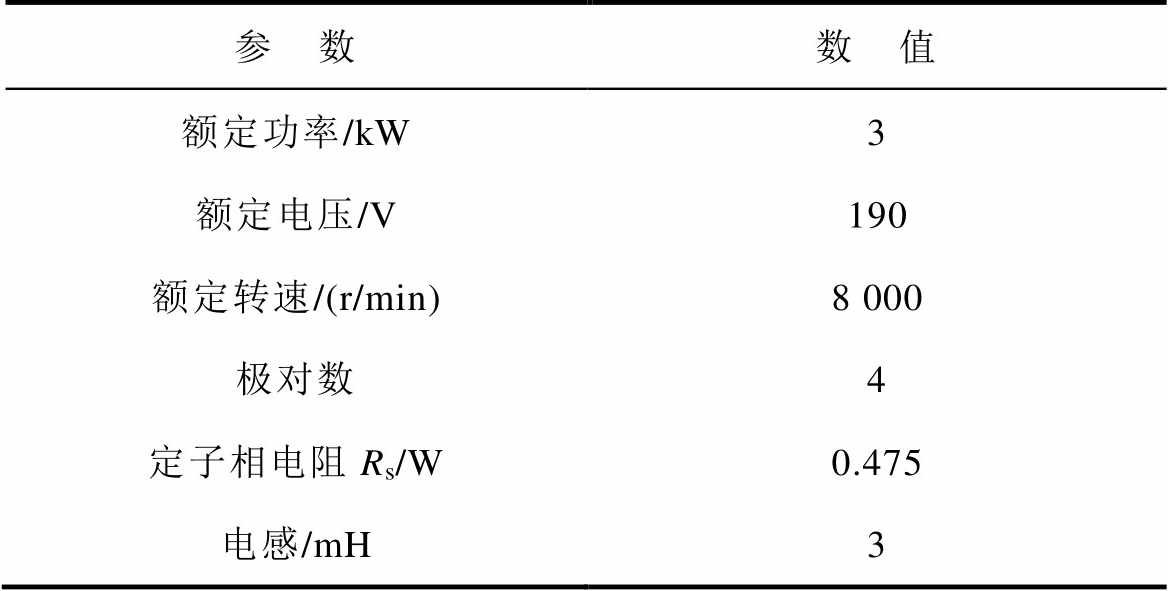
参 数数 值 额定功率/kW3 额定电压/V190 额定转速/(r/min)8 000 极对数4 定子相电阻Rs/W0.475 电感/mH3
先进行了电机起动的实验。此时,420V的直流电压不能满足12 000r/min时电机的电压需求,直流链电压应按图3中的最短曲线方程上升。
阻抗网络中电容的电压可以反映直流链电压的变化情况,如图8所示。在电机起动和停止加速时,电容电压出现了超调,这是由电机电流突变引起的。为了更加直观地观察直流链电压,图9给出了直流链电压的计算值。这个值是通过直通占空比和电容电压由式(14)计算而来的。图9表明,直流链电压较好地跟随了给定,提出的直流链电压控制方法在模糊PI控制下可以被较为精确地实现。图10是直接测量得到的直流链电压,测量结果与计算结果基本一致。电机起动实验表明,该方法能有效地控制逆变器。
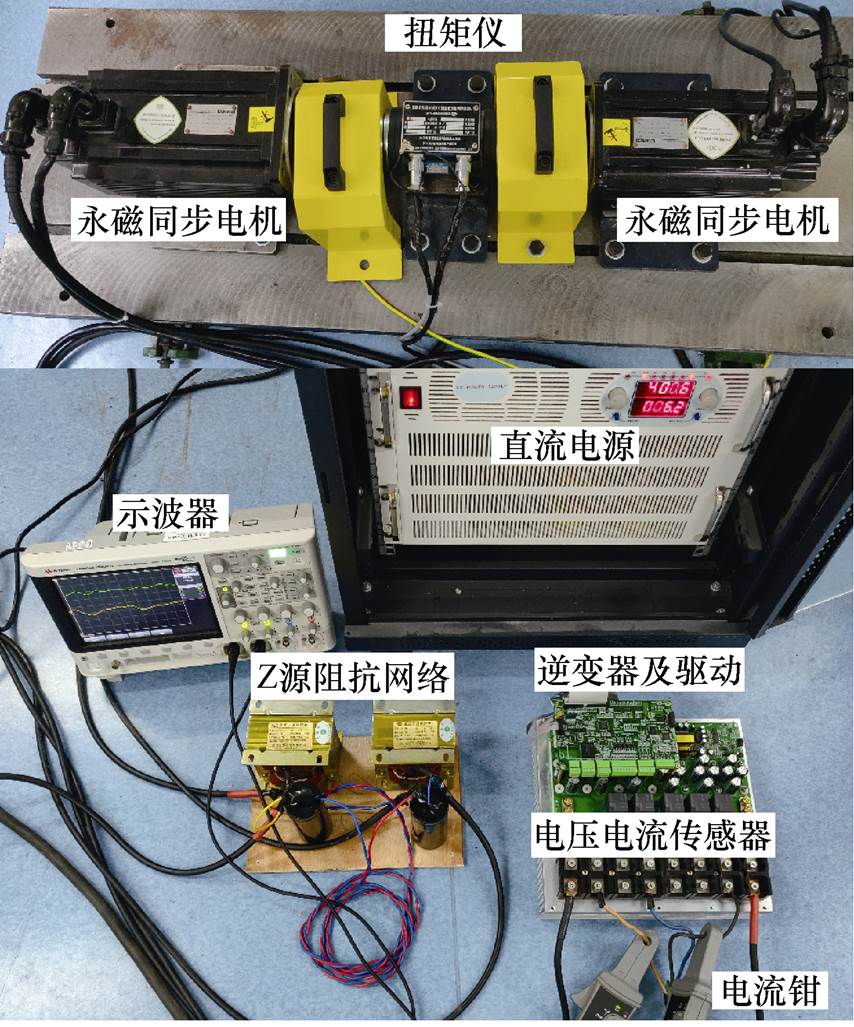
图7 Z源逆变器实验平台
Fig.7 Platform of Z-source inverter
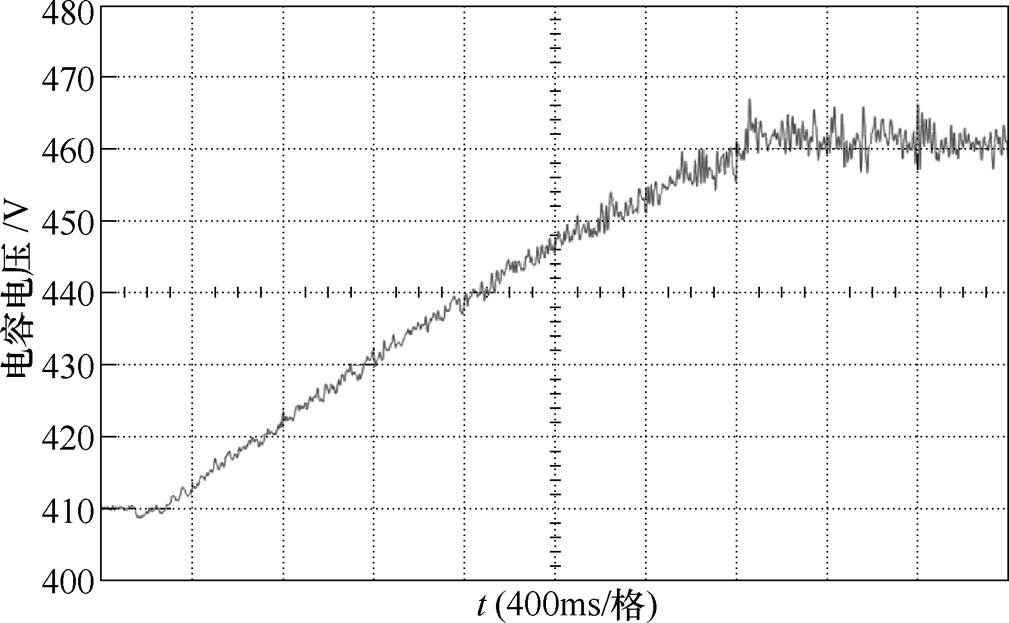
图8 电机起动时电容电压
Fig.8 Voltage of capacitor during start-up
为了进一步验证所提方法,进行了电机的加速实验。电机首先以8 000r/min的速度稳定运行,此时直流链电压一直保持在420V。电机随后进行加速直至12 000r/min。
图11是电机加速时的电容电压,图12给出了直流链电压的计算值。可以看到,实际电压值与给定值之间存在净差,但随着逆变器的运行,该静态误差不断减小并最终消失。此外,当电机开始加速和停止加速时,系统也会由于电流突变而产生过渡态。直流链电压的测量值如图13所示。图13的结果与图11和图12的结果保持一致。
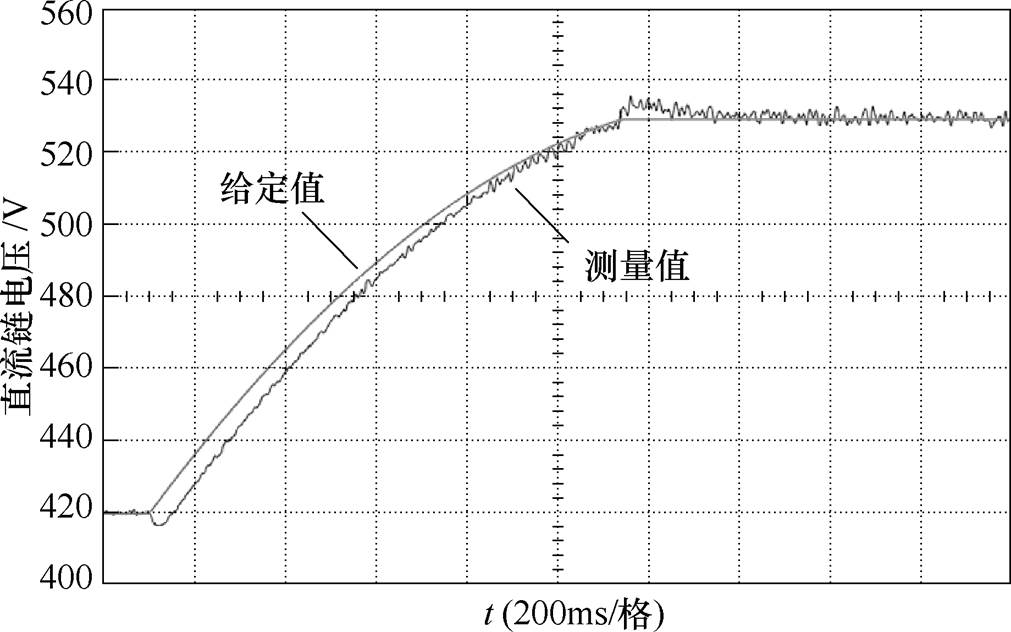
图9 电机起动时直流链电压计算值
Fig.9 Calculated DC-link voltage during start-up
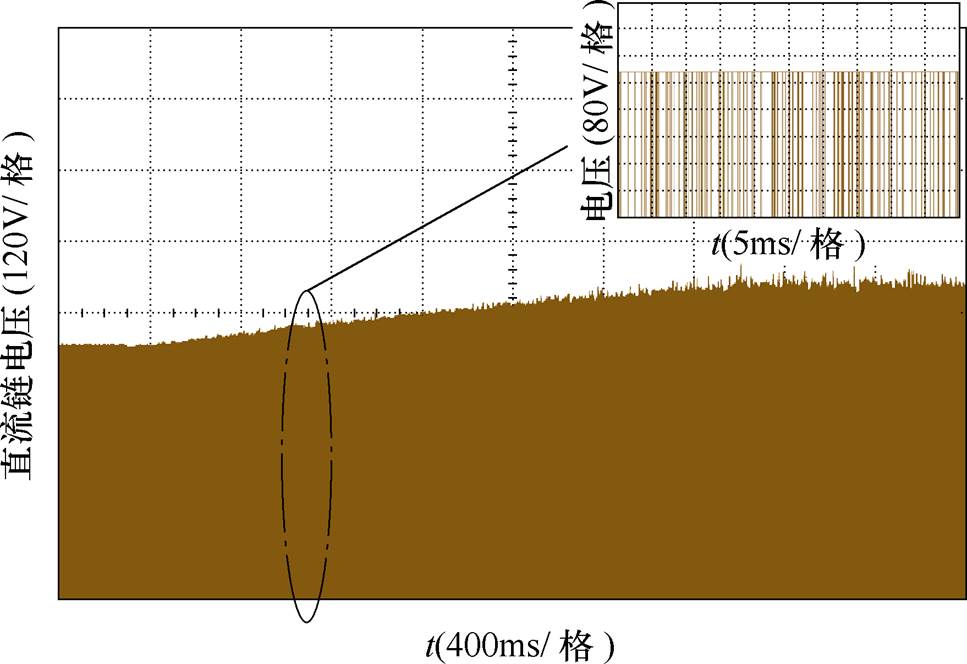
图10 电机起动时直流链电压测量值
Fig.10 Measured DC-link voltage during start-up
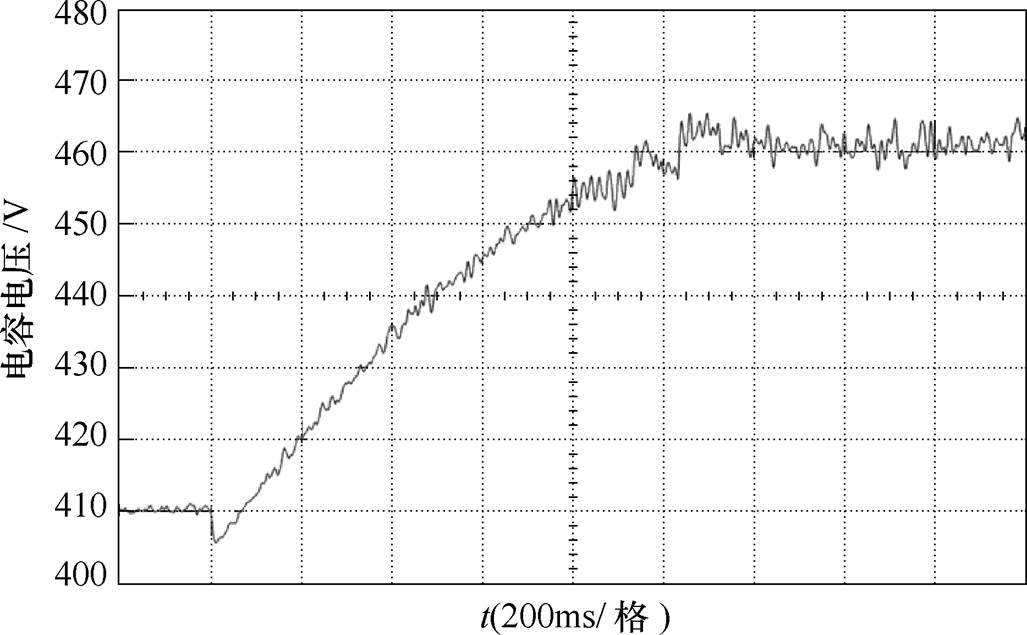
图11 电机加速时电容电压
Fig.11 Voltage of capacitor during acceleration
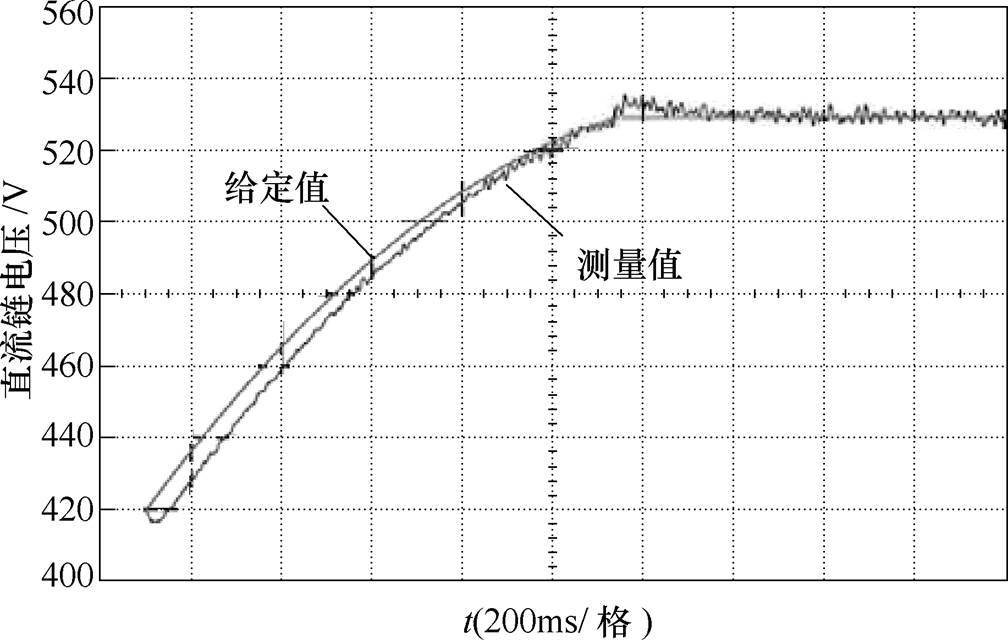
图12 电机加速时直流链电压计算值
Fig.12 Calculated DC-link voltage during acceleration
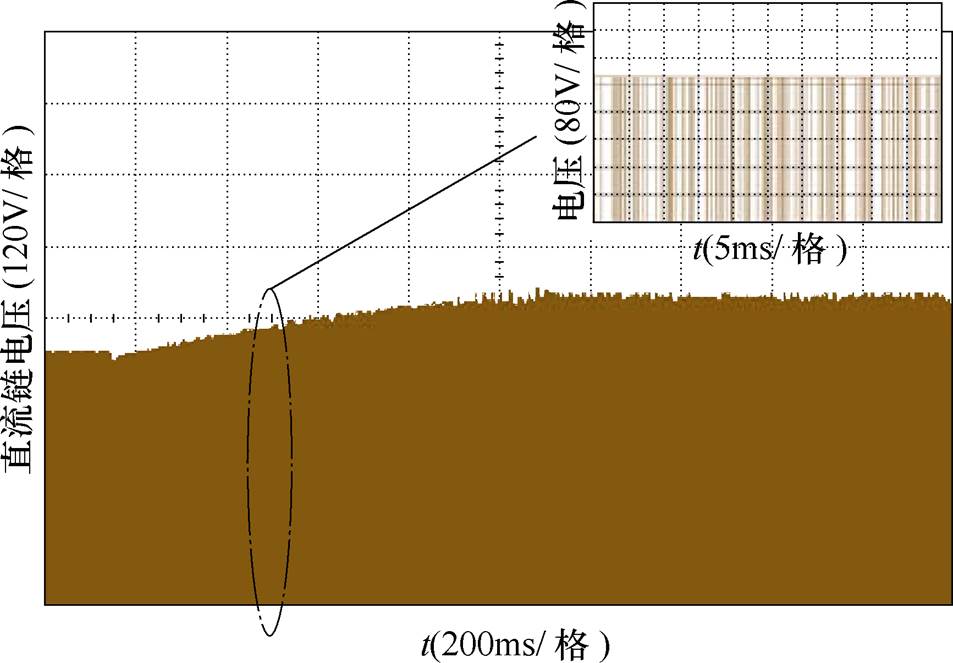
图13 电机加速时直流链电压测量值
Fig.13 Measured DC-link voltage during acceleration
图14给出加速前后的电机电流。可以看出,突然加速时,电机以最大转矩加速,电流控制器瞬间饱和。在加速过程中,稳态和瞬态都没有出现问题。这意味着,尽管直流链电压不断变化,但电机的正常运行不受影响。
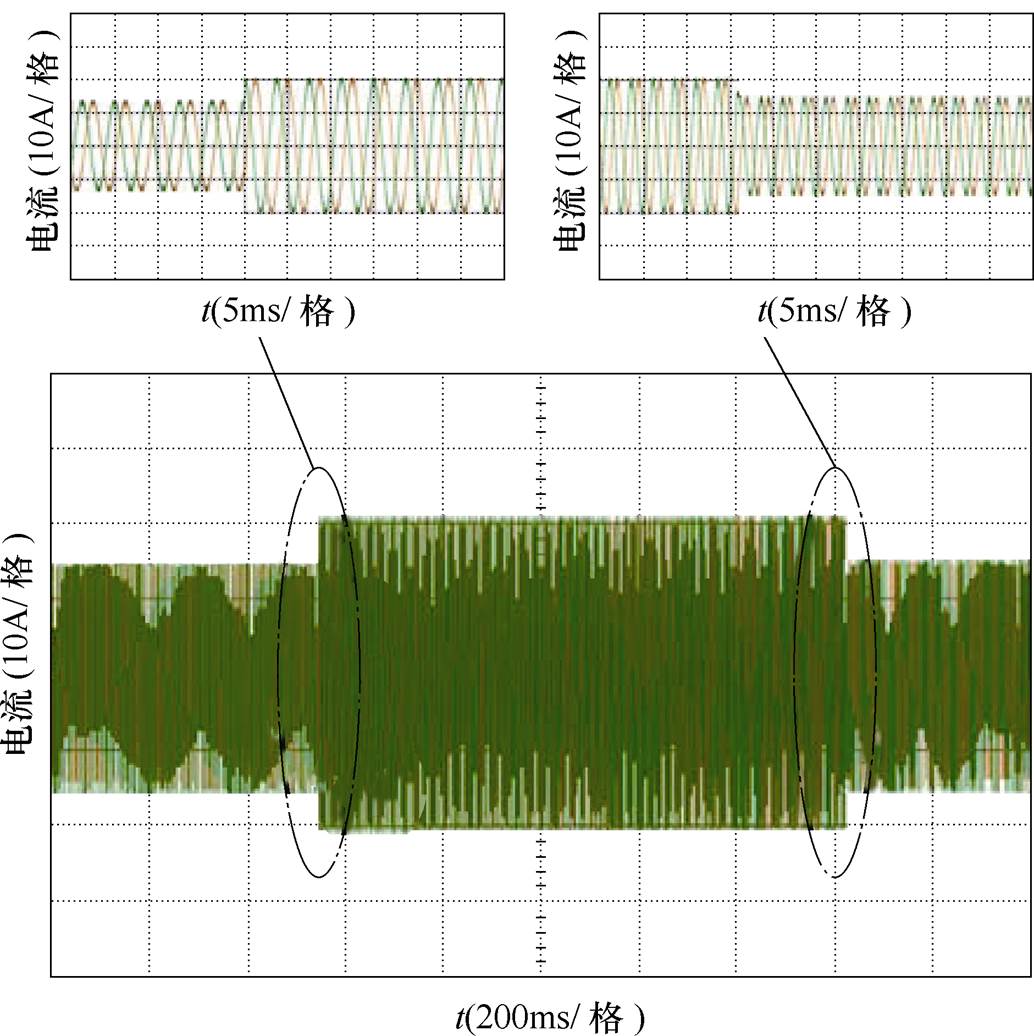
图14 电机加速时的电流
Fig.14 Current during acceleration
为了证明所提出的控制方法的有效性,本文检测了Z源逆变器的效率。图15为电机在提出的控制方法和固定直流链电压方法下的效率。当电机在8 000~12 000r/min运行时,固定直流链电压一直稳定在530V。提出的策略可以使逆变器一直高效运行,而固定直流链电压方法的效率随着电机转速的降低而降低。
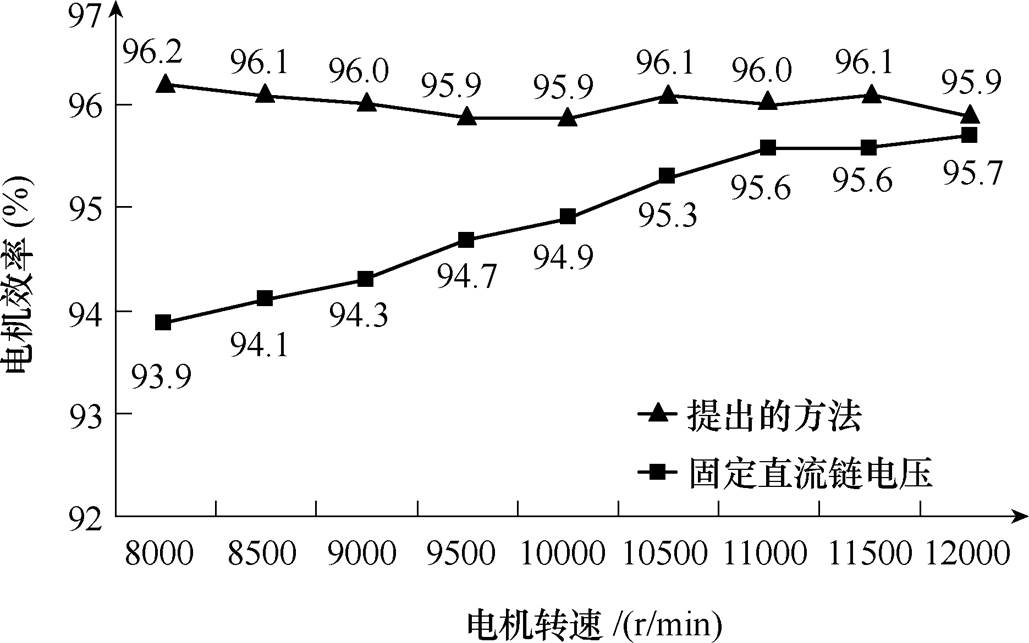
图15 逆变器效率
Fig.15 Efficiency of inverter
实验中,Z源逆变器为高速永磁同步电机供电。通过电机的起动和加速过程,验证了该策略和控制器的有效性。可以观察到,直流链电压控制策略在高速电机大范围运行中具有显著的优势。
针对Z源逆变器驱动的高速永磁电机,本文提出了一种直流链电压控制策略及实现方法。基于三维曲面空间中的短程线,本文将调制度和直通占空比作为一个整体进行协调,实现了逆变器高效运行。本文采用模糊PI的控制方法,保证了策略的有效实施。基于该策略的控制器具有较强的适用性和通用性,既能实现任意电压间的动作,又能适应基于Z源逆变器的各种SVPWM方法。
由于直流链电压随电机运行状态的变化而不断变化,因此电机的调制度一直处于合理区间。这样Z源逆变器可以有效地扩大电机运行区间,避免进入弱磁区。由于模糊PI控制具有良好的非线性控制能力,逆变器的性能和效率得到了保证。
实验结果表明,在高速电机大转速范围运行时,Z源逆变器供电稳定可靠且高效,提出的控制策略是有效的、实用的。
参考文献
[1] 张凤阁, 杜光辉, 王天煜, 等. 高速电机发展与设计综述[J]. 电工技术学报, 2016, 31(7): 1-18.
Zhang Fengge, Du Guanghui, Wang Tianyu, et al. Review on development and design of high speed machines[J]. Transactions of China Electrotechnical Society, 2016, 31(7): 1-18.
[2] Moghaddam R R. High speed operation of electrical machines, a review on technology, benefits and challen-ges[C]//Energy Conversion Congress & Exposition (ECCE), Pittsburgh, PA, 2014: 5539-5546.
[3] 董剑宁, 黄允凯, 金龙, 等. 高速永磁电机设计与分析技术综述[J]. 中国电机工程学报, 2014, 34(27): 4640-4653.
Dong Jianning, Huang Yunkai, Jin Long, et al. Review on high speed permanent magnet machines including design and analysis technologies[J]. Pro- ceedings of the CSEE, 2014, 34(27): 4640-4653.
[4] Tenconi A, Vaschetto S, Vigliani A. Electrical machines for high-speed applications: design con- siderations and tradeoffs[J]. IEEE Transactions on Industrial Electronics, 2014, 61(6): 3022-3029.
[5] Ellabban O, Aburub H, Ge Baoming. A quasi-Z- source direct matrix converter feeding a vector controlled induction motor drive[J]. IEEE Journal of Emerging & Selected Topics in Power Electronics, 2014, 3(2): 339-348.
[6] Xia Changliang, Li Xinmin. Z-source inverter-based approach to the zero-crossing point detection of back EMF for sensorless brushless DC motor[J]. IEEE Transa- ctions on Power Electronics, 2015, 30(3): 1488-1498.
[7] 屈艾文, 陈道炼, 苏倩, 等. 三相准Z源并网逆变器的简单升压改进空间矢量调制策略[J]. 电工技术学报, 2018, 33(4): 826-836.
Qu Aiwen, Chen Daolian, Su Qian, et al. Simple Boost modified space vector modulation strategy for three-phase quasi-Z-source grid-connected inverter[J]. Transactions of China Electrotechnical Society, 2018, 33(4): 826-836.
[8] 董帅, 张千帆, 王睿, 等. SVPWM控制时双向Z源逆变器电容电压纹波分析[J]. 电工技术学报, 2017, 32(24): 107-114.
Dong Shuai, Zhang Qianfan, Wang Rui, et al. Analysis of capacitor voltage ripple for bi-directional Z-source inverters based on SVPWM[J]. Transactions of China Electrotechnical Society, 2017, 32(24): 107-114.
[9] 丁新平, 钱照明, 崔彬, 等. 基于模糊PID的Z源逆变器直流链升压电路控制[J]. 中国电机工程学报, 2008, 28(24): 31-38.
Ding Xinping, Qian Zhaoming, Cui Bin, et al. Fuzzy PID controller for DC-link boost voltage in Z-source inverter[J]. Proceeding of the CSEE, 2008, 28(24): 31-38.
[10] Hardi S, Idris M H, Rohana I. Adjustable speed drives response to voltage sags[J]. Applied Mechanics and Materials, 2013, 367(8): 171-180.
[11] 熊飞, 吴俊勇, 郝亮亮, 等. 不对称电压跌落下逆变电源的多目标控制策略[J]. 电工技术学报, 2017, 32(1): 107-116.
Xiong Fei, Wu Junyong, Hao Liangliang, et al. Multi- objective control strategies of grid interface inverter under unbalanced voltage sags[J]. Transactions of China Electrotechnical Society, 2017, 32(1): 107-116.
[12] 窦汝振, 温旭辉. 永磁同步电动机直接转矩控制的弱磁运行分析[J]. 中国电机工程学报, 2005, 25(12): 117-121.
Dou Ruzhen, Wen Xuhui. Analysis of field weakening operation for the direct torque control of PMSM[J]. Proceeding of the CSEE, 2005, 25(12): 117-121.
[13] 薛必翠, 丁新平, 张承慧, 等. 准Z源逆变器交流调速系统及部分PAM/PWM控制策略[J]. 电工技术学报, 2012, 27(10): 142-149.
Xue Bicui, Ding Xinping, Zhang Chenghui, et al. Quasi-Z-source inverter adjustable speed drives system and its partly PAM/PWM control strategy[J]. Transactions of China Electrotechnical Society, 2012, 27(10): 142-149.
[14] Yang Shuitao, Ding Xinping, Zhang Fan, et al. Unified control technique for Z-source inverter[C]// IEEE Power Electronics Specialists Conference, Rhodes, Greece, 2008: 3236-3242.
[15] Gerada D, Mebarki A, Brown N L, et al. High-speed electrical machines: technologies, trends, and deve- lopments[J]. IEEE Transactions on Industrial Elec- tronics, 2014, 61(6): 2946-2959.
[16] Loh P C, Vilathgamuwa D M, Gajanayake C J, et al. Transient modeling and analysis of pulse-width modulated Z-source inverter[J]. IEEE Transactions on Power Electronics, 2007, 22(2): 498-507.
Z-Source Inverter DC-Link Voltage Control Strategy for High Speed Permanent Magnet Motor
Abstract This paper presents a DC-link voltage control strategy and implementation method for Z-source inverters. In order to expand the operation range of high-speed permanent magnet motor and improve the power supply efficiency, it is necessary to control the DC-link voltage of Z-source inverter in real time according to the operation states of the motor. The proposed strategy not only considers the DC-link voltage of the motor in steady state, but also designs the dynamic boost curve and adopts the corresponding non-linear controller to ensure the implementation effect. The proposed strategy coordinates the two main control variables in the Z-source inverter, i.e. shoot-through duty ratio and modulation index. Therefore, it ensures the stability of the system while achieving fast following and reducing the loss. In addition, a fuzzy PI controller based on the indirect control of capacitor voltage is used to control the DC-link voltage to suppress the system fluctuation caused by the change of the given value or the motor load. Besides, the proposed strategy can be applied to various conventional voltage PWM strategies of Z-source inverter. Experiments have verified the effectiveness of the proposed strategy.
keywords:Electrical drives, high speed permanent magnet motors, fuzzy control, unified control, Z-source inverter
中图分类号:TM341
DOI: 10.19595/j.cnki.1000-6753.tces.190877
国家自然科学基金资助项目(51777064)。
收稿日期 2019-07-13
改稿日期 2019-08-26
吴昊坤 男,1995年生,硕士研究生,研究方向为高速电机和Z源逆变器控制系统。E-mail: wuhaokun2016@163.com
黄科元 男,1974年生,副教授,硕士生导师,研究方向为电力电子与电力传动、风力发电及其控制。E-mail: kyhuang@163.com(通信作者)
(编辑 崔文静)