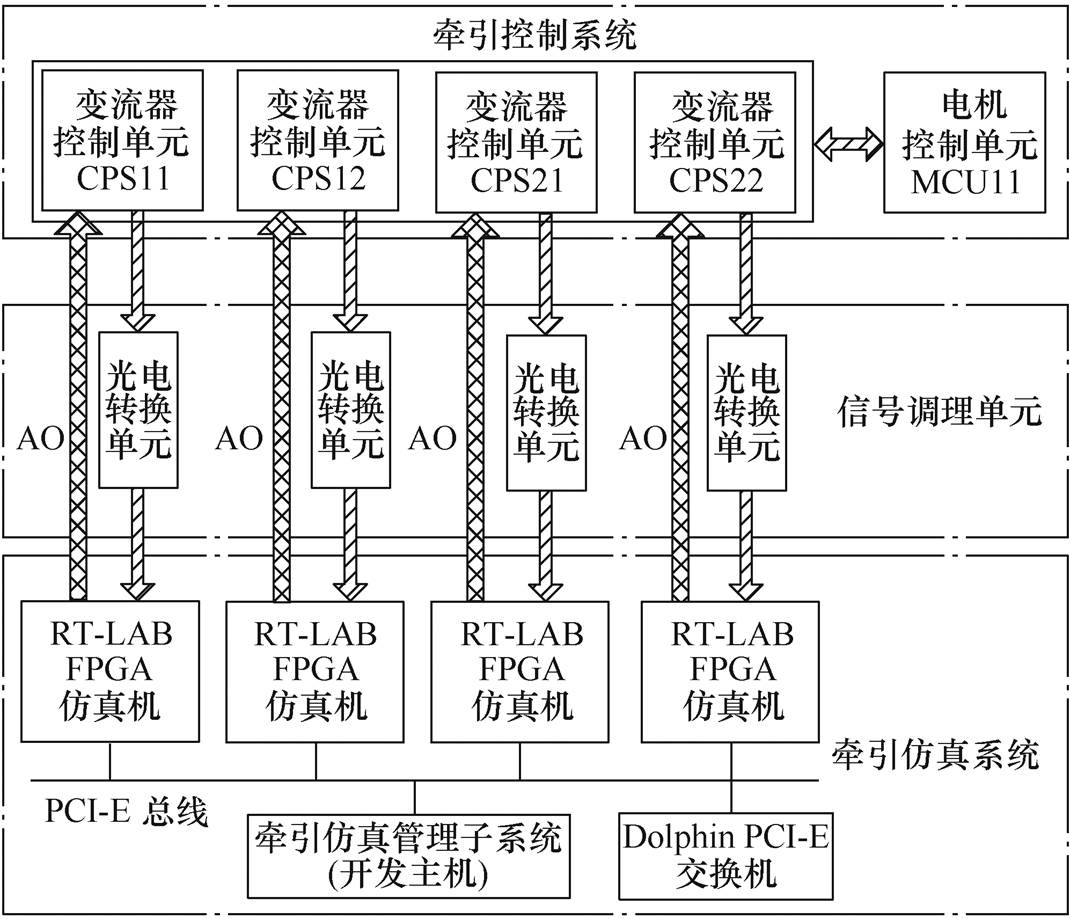
图1 高速磁悬浮硬件在环实时仿真平台的组成结构
Fig.1 The composition of the high-speed maglev HIL real-time simulation platform
摘要 常导电磁吸引型磁悬浮列车采用长定子直线同步电机进行驱动,由于磁悬浮列车运行环境构建复杂、成本高,实际建设高速磁悬浮试验线存在诸多困难。为了在实验室中开展高速磁悬浮交通牵引控制策略的相关研究,搭建硬件在环实时仿真平台是非常必要的。该文介绍的基于RT-LAB仿真机的硬件在环实时仿真平台,包括背靠背型三电平变流器、长定子直线同步电机和牵引控制系统,可以验证高速磁悬浮列车牵引控制系统的性能、牵引控制策略以及系统接口等,对于掌握高速磁悬浮交通的核心技术具有重要价值。
关键词:常导电磁吸引型磁悬浮列车 长定子直线同步电机 硬件在环 实时仿真平台 RT-LAB
磁悬浮列车[1]克服了车辆与轨道的接触和磨损,使轨道列车的速度得到了巨大提升,填补了高铁与飞机两类交通工具之间的速度空白。同时,磁悬浮列车还具有能耗低、运量大、适合远距离高速运输等优点[2]。掌握磁悬浮列车的核心技术有利于国家开展新一轮的轨道交通布局,提高我国的轨道交通运输能力。
磁悬浮列车的运行环境构建复杂、费用高[3-4],因此在牵引控制系统的研发初期,为了验证控制系统的可靠性以及控制策略的有效性,就需要搭建硬件在环(Hardware-In-the-Loop, HIL)实时仿真平台。在磁悬浮列车的HIL实时仿真系统中,实时仿真器用数学模型模拟实现变流器及直线电机,实际控制器对实时仿真器加以控制,两者进行数据交互,实现了系统多参数、多运行条件的测试,并具有灵活性好、体积小、周期短和准确度高等优点[5]。
文献[6]构建变流器与电机的状态空间模型,搭建交流驱动系统的实时仿真平台。通过与其他离线仿真工具进行比较,证明实时仿真平台可以测试控制器,且具有较高精度。文献[7]建立电力机车传动系统的硬件在环实时仿真平台,缩短了电力机车电传动系统的开发周期,降低了设计成本,通过仿真结果与实际实验验证实时仿真系统的正确性。文献[8]开发基于dSPACE的永磁同步电机硬件实验平台,并在该平台上对模糊自适应控制策略进行验证。文献[9]提出一种在现场可编程门阵列(Field-Programmable Gate Array, FPGA)中建立实时仿真器的方法,可以实现电机和变流器的纳秒级实时仿真,证明了实时仿真系统可以代替实际的驱动系统进行控制器的研发。文献[10]介绍了由中国科学院电工研究所研发的基于dSPACE仿真机的高速磁悬浮半实物仿真平台,可以在实验室中验证高速磁悬浮的牵引控制策略。
与dSPACE仿真机相比,RT-LAB仿真机具有实时代码生成快、建模简单、对电力电子器件兼容性强等优势[11-12]。本文将介绍一种基于RT-LAB仿真机的硬件在环实时仿真平台,该平台由变流器仿真系统、电机仿真系统和控制系统三部分组成,可以实现对变流器和电机的纳秒级实时仿真,并对高速磁悬浮牵引控制策略进行全面验证。首先介绍该仿真平台的结构;然后介绍高速磁悬浮列车的双端供电控制策略、换步控制策略以及无线传输模拟方法;最后在该平台上对相关控制策略进行了实验,证明了该仿真平台可以实现磁悬浮列车全速度范围的实时仿真,验证了所提牵引控制策略的有效性,表明可以通过硬件在环实时仿真平台进行牵引控制器的研发。
本文所介绍的高速磁悬浮硬件在环实时仿真平台,主要包括牵引控制系统、信号调理单元和牵引仿真系统,如图1所示。牵引控制系统实现对牵引仿真系统中的变流器以及直线电机的控制,并与牵引仿真管理子系统实现数据交互。
图1 高速磁悬浮硬件在环实时仿真平台的组成结构
Fig.1 The composition of the high-speed maglev HIL real-time simulation platform
牵引仿真系统包括四套高功率变流器仿真子系统和一套直线电机仿真子系统,如图2所示。四套高功率变流器仿真子系统包含四台RT-LAB的FPGA仿真机,每台FPGA仿真机对应一套高功率变流器仿真子系统。四台FPGA仿真机中有两台同时作为直线电机仿真子系统。四台FPGA仿真机分别通过数据线连接到RT-LAB的Dolphin机箱上。四台FPGA仿真机之间通过光纤连接,以欧若拉协议进行通信。
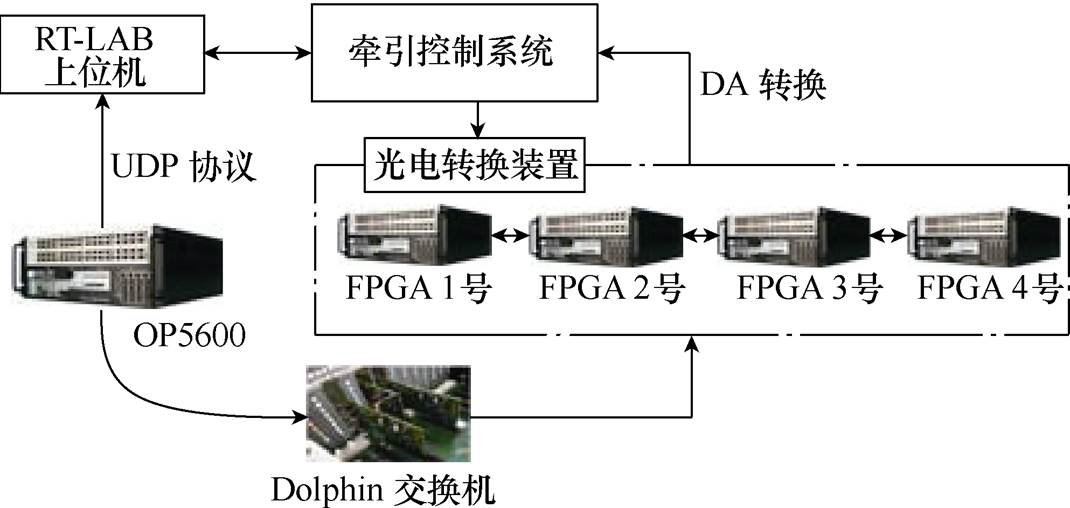
图2 牵引系统仿真设备
Fig.2 Traction system simulation equipment
牵引仿真管理子系统包括Windows PC和RT- LAB的CPU仿真机。Windows PC通过网线与RT- LAB的CPU仿真机连接。CPU仿真机通过数据线连接到RT-LAB的Dolphin机箱。可以通过CPU仿真机实现模型开发配置、数据采集、仿真监控等功能。
为了满足磁悬浮列车在多编组条件下的高速运行,此平台采用了背靠背结构的有源中点钳位型(Active Neutral Point Clamped, ANPC)三电平变流器[13]。变流器容量为24MV·A,采用双整流双逆变共直流母线的架构,如图3所示。

图3 牵引变流器的简化结构
Fig.3 Simplified structure of traction converter
在变流器的输出侧存在两种输出模式:一种是是直接输出模式(Direct Mode, DM),即两组变流器通过输出变压器一次绕组并联输出。在列车低速运行时采用此种输出模式,因为直接输出模式可以提供更大的驱动电流,以使列车获得更高的加速度;另一种输出模式是变压器模式(Transformer Mode, TM),即两组变流器通过变压器串联输出,在列车高速运行时采用此种输出模式,变压器模式可以提供更大的输出电压,以克服列车高速运行时所产生的反电动势。
有源中点钳位型三电平变流器的拓扑结构如图4所示。有源中点钳位型三电平变流器有效地克服了二极管中点钳位型(Neutral Point Clamped, NPC)拓扑中损耗分布不均的问题,进一步提高了变流器的输出功率。变流器的控制方法采用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)和选择性谐波消除脉宽调制(Selective Harmonic Eliminated Pulse Width Modulation, SHEPWM)相结合的调制算法,系统开关频率为300Hz左右。
OPAL-RT对电力电子器件的解算采用eHS技术[14-15]。该技术采用离散化的普约维奇(Pejovic)法,将开关导通和关断状态分别等效为电感和电容,进而通过离散化处理将其进行诺顿等效为一个电流源并联一个电阻,如图5所示,图中,Leq表示等效电感,Ceq表示等效电容,GC和GL表示电阻。
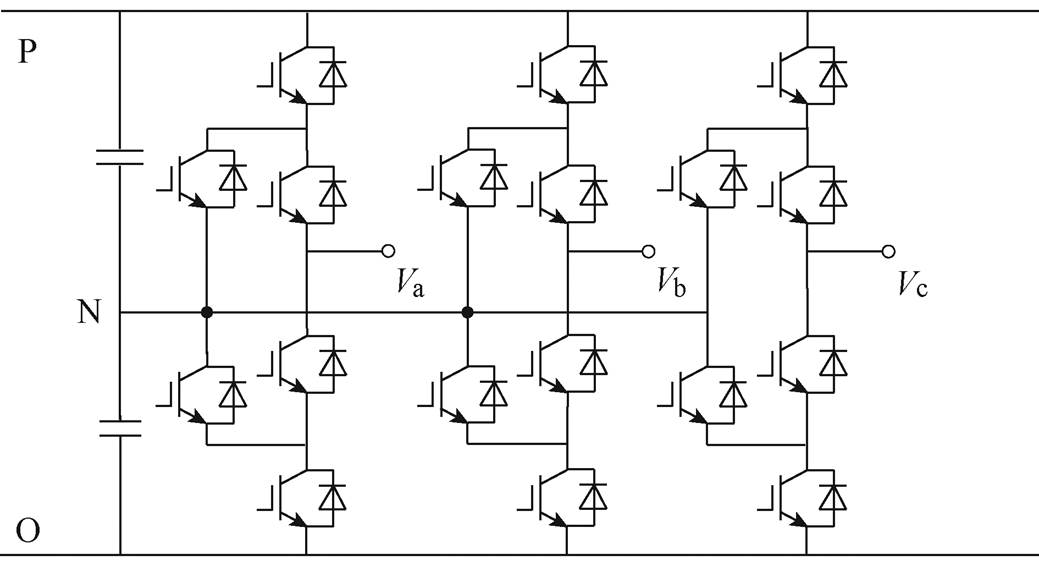
图4 ANPC变流器的拓扑
Fig.4 Topology of ANPC converter
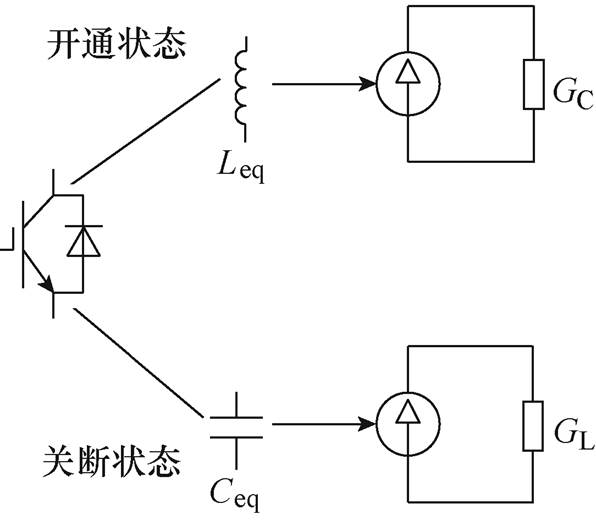
图5 开关的不同状态等效图
Fig.5 Equivalent diagram of different state of switch
长定子直线同步电机可认为是将旋转电机沿轴向切开拉长而成,在工作原理上两者并无不同。因此,可以借鉴传统电机的基本数学模型来建立长定子直线同步电机的数学模型[16-18]。
由于磁悬浮列车单节车厢长约24m,1.2km左右的定子绕组长度远大于列车励磁磁极的覆盖长度,故将电机分成列车覆盖和未覆盖两部分来分别建立数学模型,列车未覆盖部分同时考虑馈电电缆等效阻抗参数,最后再合并为统一的数学模型。
dq坐标系下列车磁极覆盖部分的定子绕组电压、磁链方程为
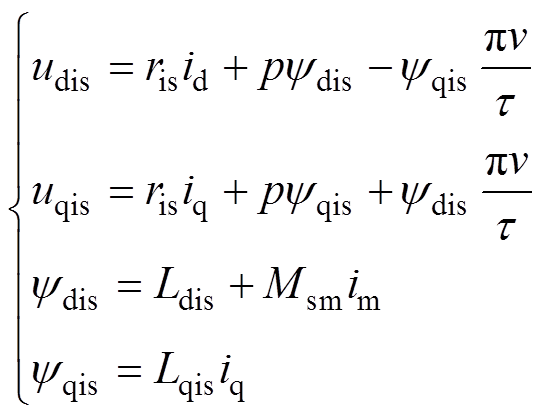 (1)
(1)式中,Ldis=Ldis+Ldiso,Lqis=Ldis+Lqiso;Ldis、Lqis、Ldiso、Lqiso、Ldis分别为列车励磁磁极覆盖部分的定子绕组在dq坐标系下的总电感、主电感和漏感;ydis、yqis为列车磁极覆盖部分定子在dq坐标轴的磁链分量;Msm为定子绕组与励磁绕组的互感;im为励磁电流;id、iq为定子电流在dq坐标轴的分量;udis、uqis为列车磁极覆盖部分定子电压在dq坐标轴的分量;ris为列车磁极覆盖部分的定子电阻;t 为列车励磁电磁铁极距;v为列车运行速度;p为微分算子。
dq坐标系下列车磁极未覆盖部分的定子绕组电压、磁链方程为
 (2)
(2)式中,Los为列车励磁磁极未覆盖定子绕组总漏感;Lon为馈电电缆等效电感参数;ydos、yqos为列车磁极未覆盖部分定子在dq坐标轴的磁链分量;ros为列车磁极未覆盖绕组的电阻;ron为馈电电缆等效电阻;Ros为列车磁极未覆盖部分的总电阻;udos、uqos为列车磁极未覆盖部分定子电压在dq坐标轴的分量。
对于常导电磁吸引式磁悬浮列车所用的长定子直线同步电机来讲,定子电阻总的电压方程、磁链方程、阻抗参数是式(1)与式(2)两部分之和,可表示为
 (3)
(3)式中,yd、yq为定子总磁链在dq坐标轴的分量;Ld、Lq为定子总电感在dq坐标轴的分量;R为定子绕组与馈电电缆的总电阻;ud、uq为电机定子电压在dq坐标轴的分量。
磁悬浮列车所用的长定子直线同步电机采用双端供电模式时,供电系统的结构如图6所示,其中,rk1、rk2、rk3、rk4为馈电电缆的电阻;Lk1、Lk2、Lk3、Lk4为馈电电缆的电感;Ck1、Ck2、Ck3、Ck4为馈电电缆的对地电容。
双端供电模式下,相当于有四台高功率模块同时为车辆供电,对于轨道单侧的长定子直线同步电机来讲,是两台变流器并联对电机供电。此时,可以将每台变流器简化为一个电压源,由此可以得到此种方式下单台长定子直线电机的A相等效电路,如图7所示。
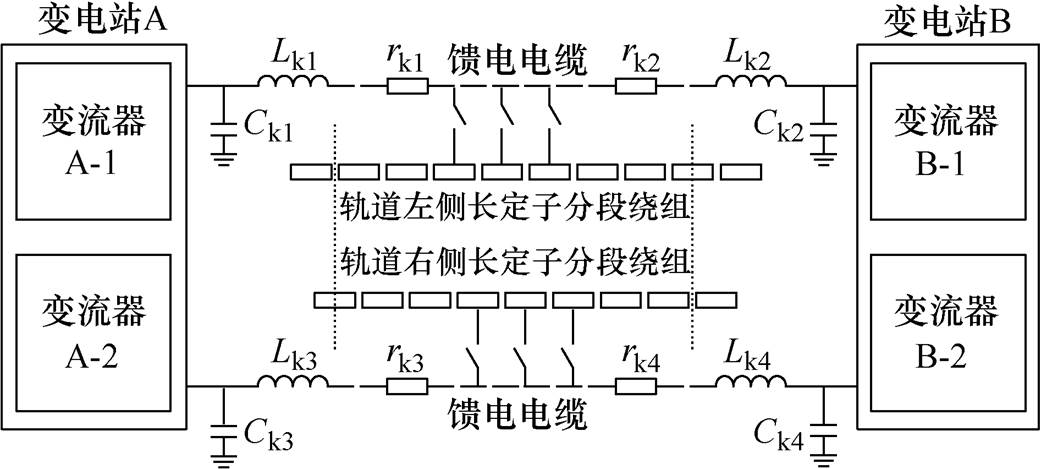
图6 磁悬浮列车供电系统
Fig.6 Diagram of maglev train power supply system
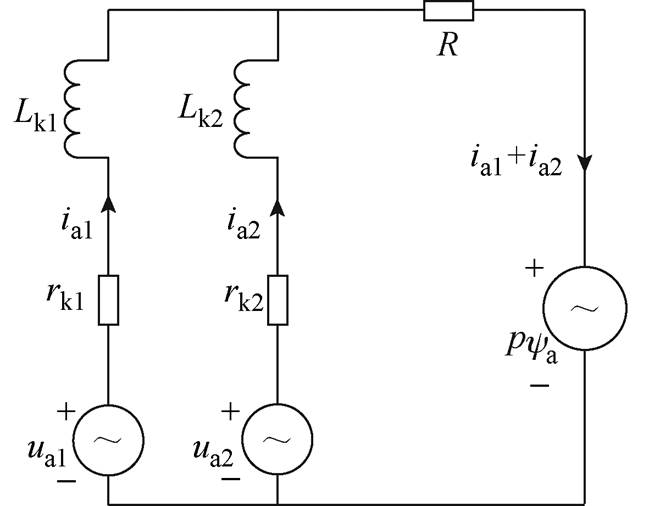
图7 磁悬浮列车供电系统A相等效电路
Fig.7 A phase equivalent circuit of maglev train power supply system
将A相的等效电路推广到三相,可以得到各自的等效电路。为了消除时变电感带来的复杂性,将ABC坐标系的等效电路和微分方程转换到dq坐标系,得到的等效电路如图8所示。
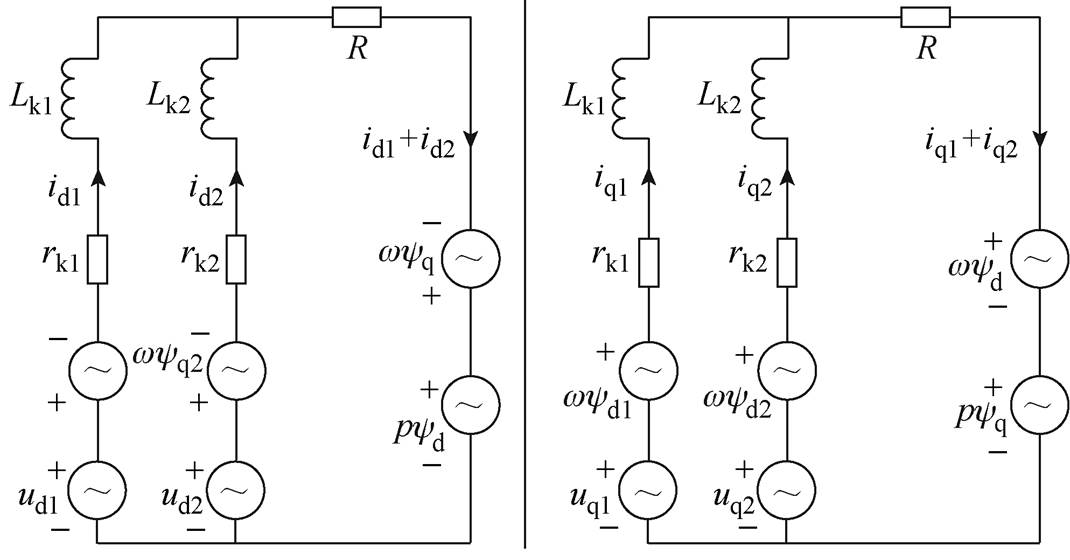
图8 供电系统在旋转坐标系下的等效电路
Fig.8 Equivalent circuit of power supply system in rotating coordinate system
根据图8所示的长定子直线同步电机在旋转坐标系下的等效电路,可以得到其在双端供电模式下的数学模型。将直线电机在双端供电模式下的数学模型写为电流微分方程并整理成状态方程形式,有
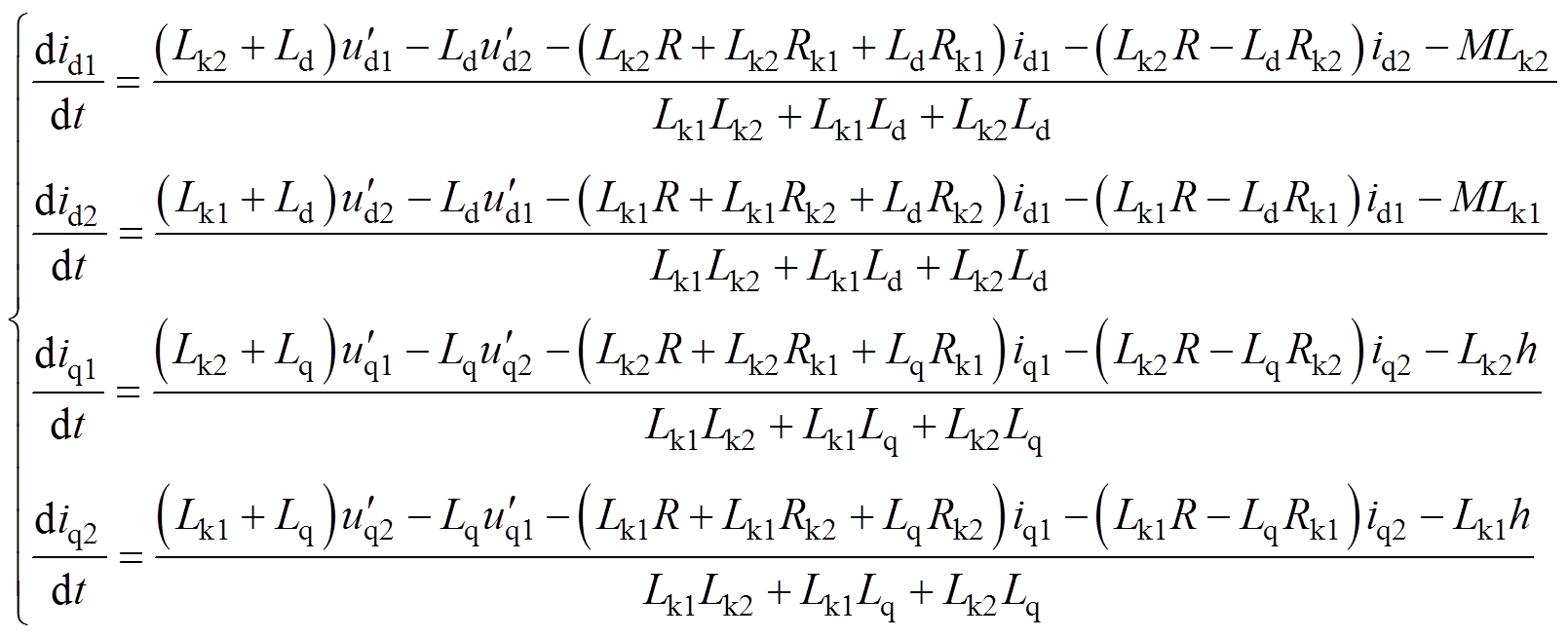 (4)
(4)其中
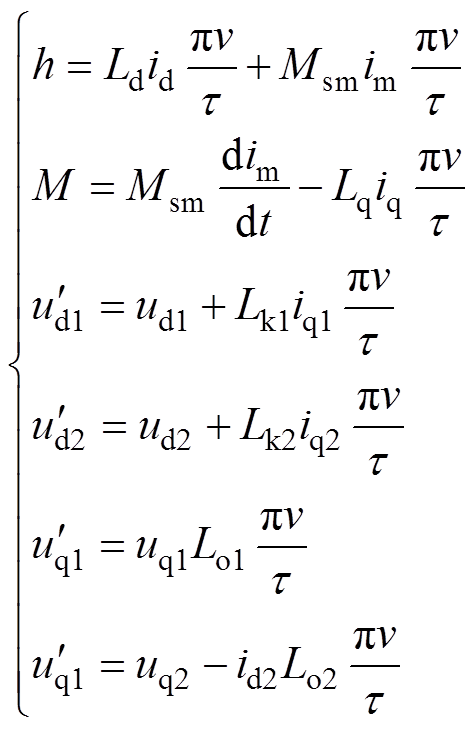
由式(4)可见,这是一个强耦合的系统,每台变流器电流不仅与自身交叉耦合的电流和电压相关,还与另外一台变流器的电流、电压以及电机励磁电流相关。
针对直线同步电机作直线运动的特性,根据虚位移原理计算电机的牵引力,则可以得到电磁推力方程为
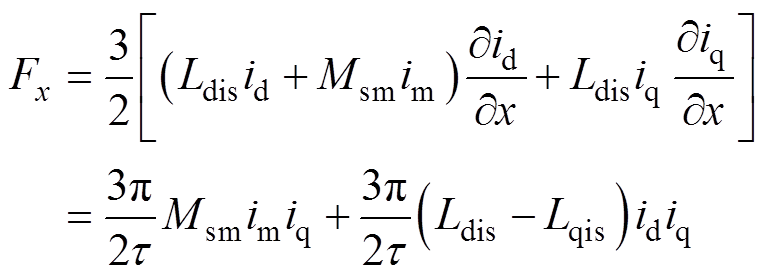 (5)
(5)对于长定子直线同步电机,其运动方程为
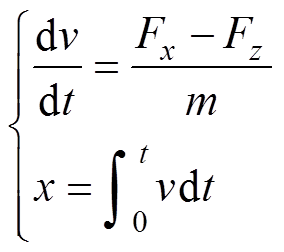 (6)
(6)
式中, 为直线电机产生的牵引力;
为直线电机产生的牵引力; 为磁悬浮列车的阻力;x为列车运行的里程。
为磁悬浮列车的阻力;x为列车运行的里程。
Opal-RT公司提供了可以在Matlab环境下进行图形化FPGA建模的软件包。根据式(4)数学方程,可以在Matlab中建立长定子直线同步电机的数学模型,将模型编译得到的Bin文件配置到FPGA机箱中,即可实现直线电机的仿真。将FPGA仿真机的接口与控制系统连接,便可进行磁悬浮列车的牵引运行控制。
磁悬浮列车在高速运行时,需要更高的供电电压,此时每台变流器会切换为变压器模式,如图3所示。在变压器模式下,每台变流器的输出电流会减小,为了继续提供较大的牵引电流,就需要采用双端供电模式,如图6所示。在双端供电模式下,位于线路两端的两组变流器通过馈电电缆对直线电机定子段并联供电。受线路阻抗变化、母线电压波动、器件特性差异、通信延时等因素的影响,并联供电的两组变流器之间会存在环流。
变流器并联供电的控制方法,主要有强迫均流控制、电流/环流独立控制和电流下垂法控制等。强迫均流控制由于电流环选取了同样的控制器参数,电感参数对截止频率影响较大,要想获得理想的稳态特性,需要较大的电感。优点是分别采用了两个完全独立的电流环进行控制,减少了两逆变器之间的通信连线。独立控制法的电机电流控制和环流控制分别属于两个不同的闭环,可以分别选取合适的控制器参数,限流电感的选取值相比较前一种方法更小。缺点在于这两个闭环都必须在一个控制板上完成,两台逆变器之间距离较远时,数据传输比较困难。电流下垂法同样具有各闭环独立控制的优势,但其抑制环流的反应速度较慢。
本文所介绍的高速磁悬浮硬件在环实时仿真平台,当变流器处于双端并联供电模式时,对于总电流和环流的控制,采用直接模式控制法。直接模式控制法以环流和总电流直接作为控制目标,即首先检测各单元输出电流以便计算出总负载电流和环流值,并通过总负载电流和环流控制器给出两台逆变器输出电压总和给定值与输出电压之差给定值,以此来调节总电机定子电流和环流。直接模式法控制框图如图9所示。
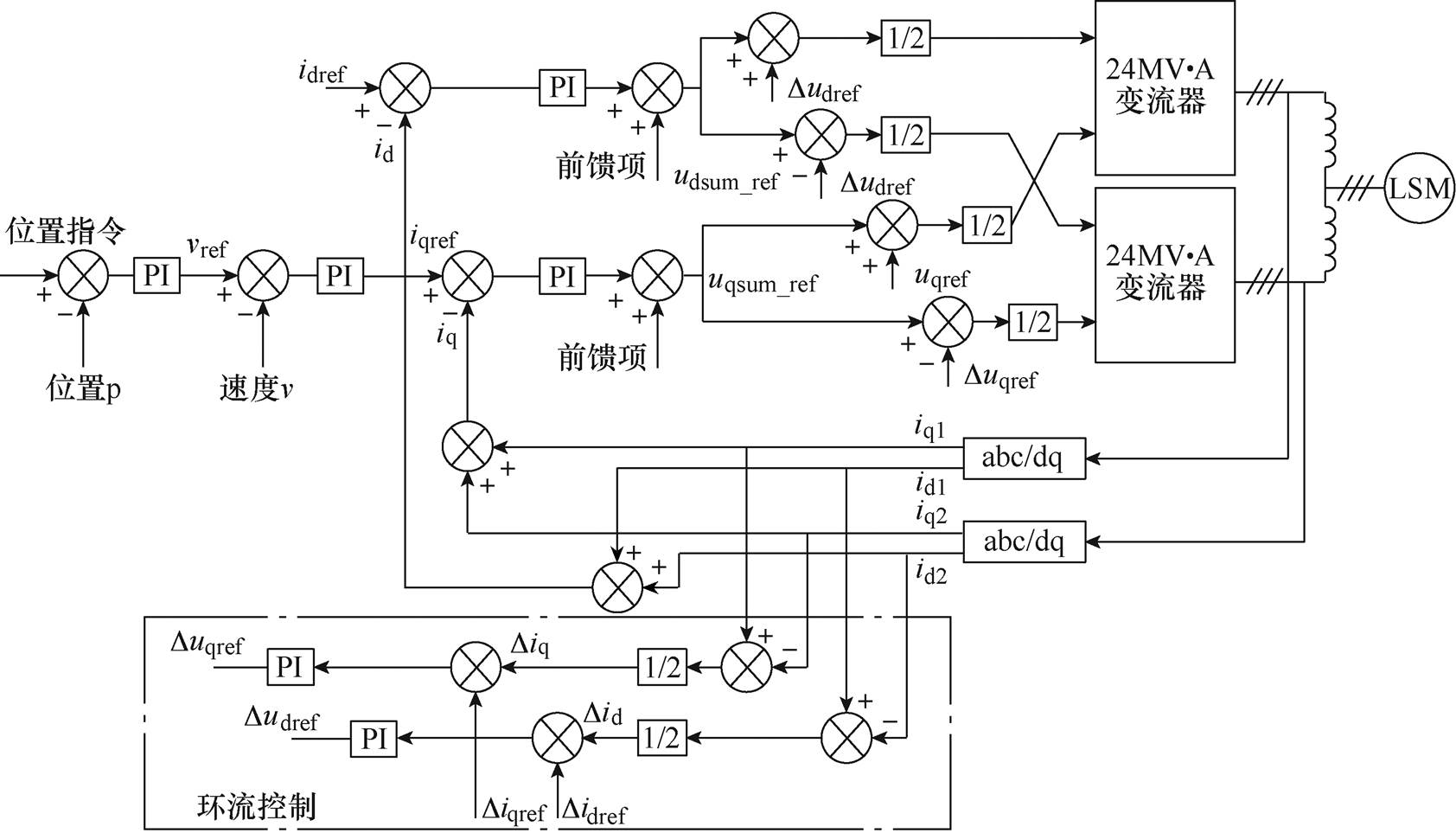
图9 直接模式法控制框图
Fig.9 The diagram of direct model control strategy
磁悬浮列车的左右两侧下部都安装了励磁绕组,且磁悬浮列车的轨道两侧都铺设了长定子绕组,因此磁悬浮列车是由两个长定子直线电机牵引的。根据长定子绕组的连接方式以及在定子段的切换方式不同,长定子绕组的换步方式有蛙跳法、两步法和三步法。本文介绍的高速磁悬浮硬件在环实时仿真平台,采用了两步法的换步方式,如图10所示。

图10 两步法
Fig.10 Two-step method
如图10所示,采用两步法的换步方式时,每个牵引变电站需要配置两组牵引功率模块,它有两组馈电电缆,分别给轨道两侧的定子段供电。图10为列车从定子段sn到sn+1的切换过程。在切换过程中,列车即将行驶出的定子段,电流下降为零;在开关站中进行轨旁开关站切换;列车即将驶入的定子段导通,电流上升至正常电流,如图11所示。图11中,t0、t4表示换步开始点,t1、t5表示定子段电流减小到零的时间,t2、t6表示sn+1定子段电流开始上升的时间,t3、t7表示换步完成。由于左右两侧的定子段交错排布,所以左右两侧的电流变化过程也交替进行。在换步时,由于电流减小为零,所以牵引力也会减小为一半,如图11中的Fx所示。
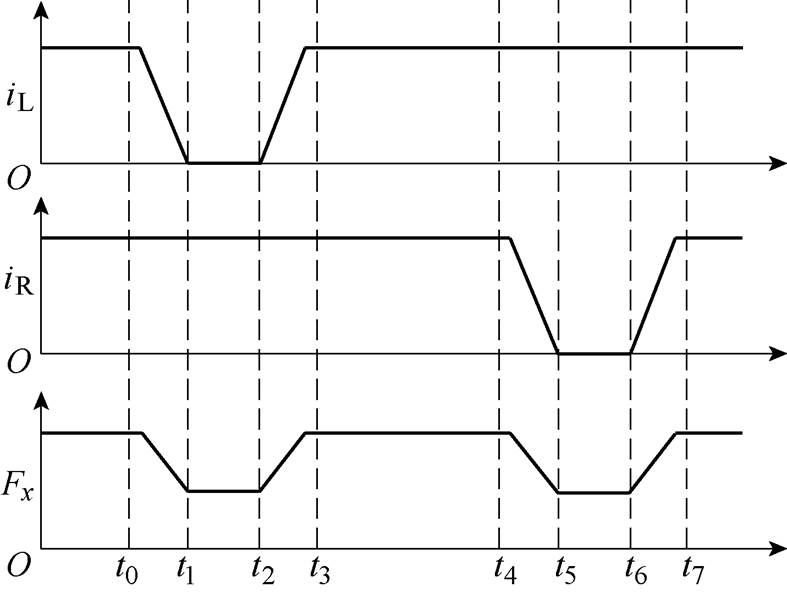
图11 换步过程的电流与牵引力
Fig.11 The current and traction during the changing step
为了实现高速磁悬浮列车的位置闭环控制和磁场定向控制,就需要检测动子的磁极位置,以实现高性能控制。
在低速时(速度小于100km/h),会通过车载动子定位测速系统进行测速定位。在头车和尾车的左右两侧各有一套位置检测传感器,四套检测装置互为冗余以保证位置检测信号的可靠性。位置检测传感器在列车运行过程中,检测到定子齿槽数并能将此信号细分获得列车的极相位位置。沿线相隔一定距离还装有定位标志板,列车经过定位标志板时,自动将检测的位置信息清零,以避免积累误差。位置信息通过车上的位置信息处理单元将检测的定位标志板信息、线圈周期信息、极相位信息、运行方向信息等统一编码后通过无线传输通道发送给地面的无线电接收单元。
在列车高速运行时,会采用无速度传感器控制算法[19-20],不需要通过无线传输装置发送位置信号。
为了模拟无线传输装置的传输延时,在该实时仿真平台上,将动子角度信息以20ms为周期发送给电机控制系统,在每个周期内认为列车速度不变,对该角度信息进行线性插值,即可获取准确的角度信息,角度误差在2%以内。
根据1.1节所介绍的硬件在环实时仿真平台的架构,在实验室中搭建了基于RT-LAB的高速磁悬浮硬件在环实时仿真平台,如图12所示,图中CCU(converter control unit)表示变流器控制单元,MCU(motor control unit)表示电机控制单元。

图12 高速磁悬浮列车硬件在环实时仿真平台
Fig.12 HIL simulation platform of high-speed maglv
在该平台上采用真实的控制器,按照最高时速600km/h的运行条件,控制列车在全速度范围内运行,仿真步长为900ns。直线电机模型中的相关参数见表1。
表1 直线电机模型参数
Tab.1 The parameters of the linear motor
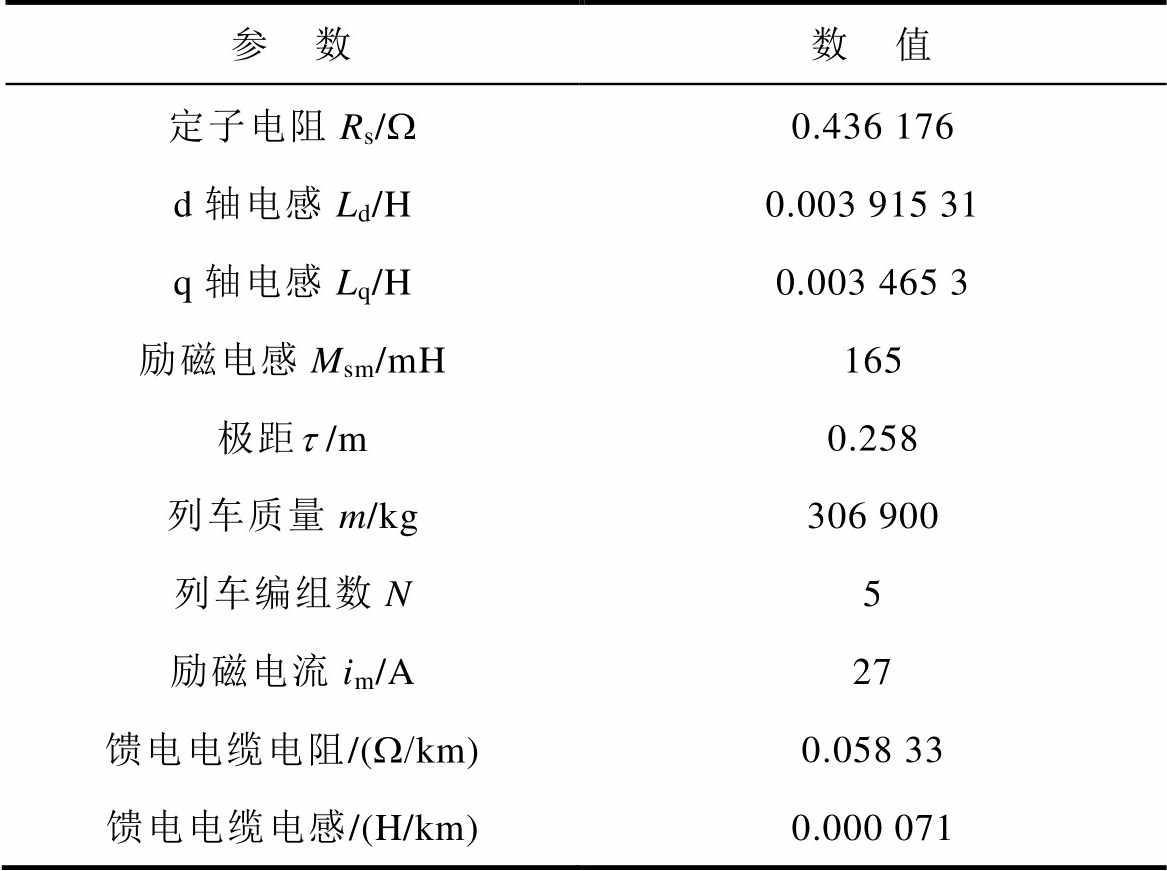
参 数数 值 定子电阻Rs/W0.436 176 d轴电感Ld/H0.003 915 31 q轴电感Lq/H0.003 465 3 励磁电感Msm/mH165 极距t /m0.258 列车质量m/kg306 900 列车编组数N5 励磁电流im/A27 馈电电缆电阻/(W/km)0.058 33 馈电电缆电感/(H/km)0.000 071
按照表1中的设定参数,对实验平台进行测试,测试结果如图13所示。从图13中可以看出,磁悬浮列车在五节编组条件下,可以达到最高时速600km/h,与上海磁悬浮示范线能够达到的最高时速430km/h相比,具有较大提升。图中所示的参考速度与实际速度基本吻合,速度曲线较平滑,说明了速度环控制器具有较好的性能。

图13 实际速度与参考速度曲线
Fig.13 The actual speed and reference speed curves
列车运行时,要同时满足供电系统的电压限幅值、电流限幅值和加速度限幅值,在满足上述三个条件的前提下,变流器将会输出最大的牵引电流,以提供最大的牵引加速度。从图14的加速度曲线中可以看出,磁悬浮列车加速过程的最大加速度为0.9m/s2,并且加速度随着速度的提升而减小,这是因为列车阻力与速度成正比。在减速过程中,风阻会为列车减速提供一定的帮助,所以减速过程的加速度数值更大,减速过程更快。
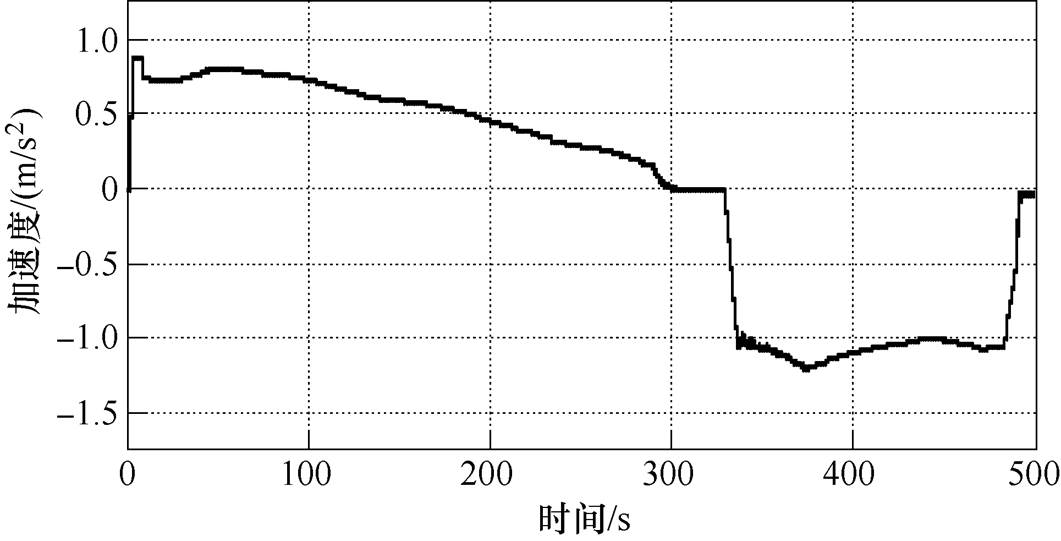
图14 磁悬浮列车加速度曲线
Fig.14 The acceleration curve of maglev train
磁悬浮列车在低速(速度小于100km/h)运行时,采用单端供电模式,即图10中的变流器A-1或B-1单独供电。单台高功率变流器通过变压器一次侧直接输出(见图3),此时的输出电压较小,当电压不足以克服反电动势时,定子电流会减小,如图15b所示。当列车在高速运行时,采用双端供电模式,即图10中的变流器A-1和A-2并联供电。此时,单台高功率变流器经变压器升压后为定子段供电。由于电压升高,变流器电流在切换为双端供电模式后可以继续增加至最大值,如图15c所示。
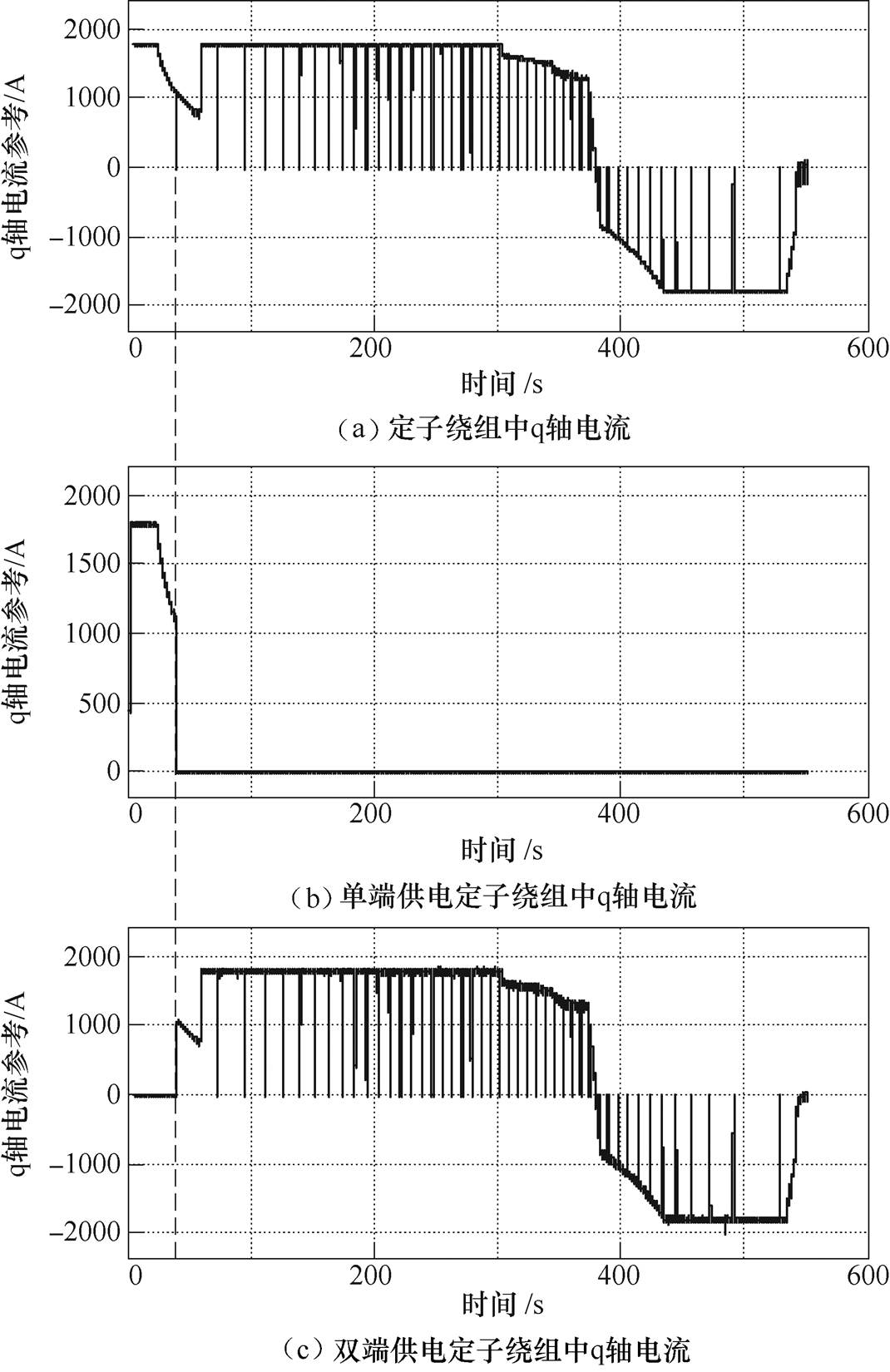
图15 轨道左侧定子绕组的电流
Fig.15 Stator current on the left side of the track
由于定子中电流较大,为了减小轨旁开关切换时引起的电压冲击,供电方式由单端供电切换为双端供电时,需要在定子段换步过程中同时完成。如图16所示,左侧定子段换步时,电流会先降为零,并保持0.5s,待轨旁开关切换完成后,再将电流恢复为设定值。
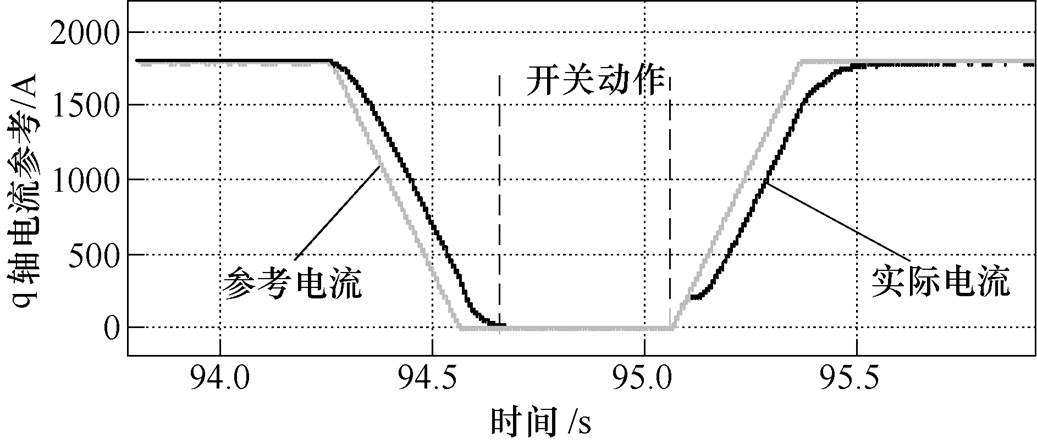
图16 左侧定子换步过程
Fig.16 The changing-step process of the left side of the track
对于长距离的磁悬浮线路来说,馈电电缆的参数随列车的位置变化而发生改变。馈电电缆的电阻和电感值与线路长度成正比,由于采用了均流控制策略,所以线路两端的变流器调制比变化趋势相反,如图17b所示,变流器A-1的调制比由小变大,而变流器A-2的调制比由大变小。图17所示结果验证了所采用的并联供电控制策略的有效性。
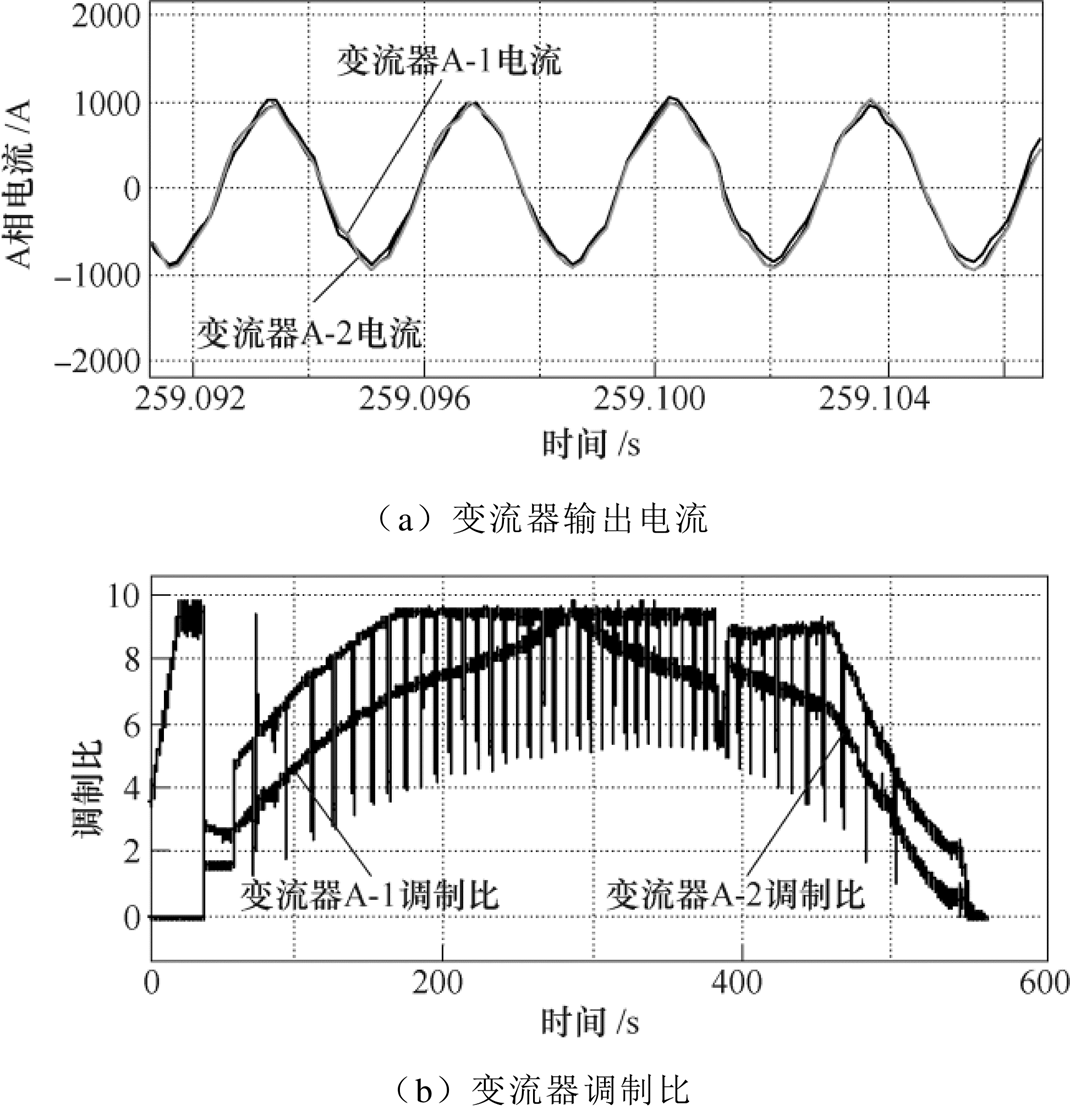
图17 双端供电模式下的电流与调制比
Fig.17 The current amd modulation ratio in double-ended power mode
根据2.3节所述,磁悬浮列车的位置信号每隔20ms传输一次,所以得到的位置信号如图18a所示,呈阶梯形。阶梯形的位置信号无法实现准确的磁场定向控制,因此需要对该信号进行插值处理。插值后的结果如图18a中的锯齿波所示,列车位置连续变化,可以用于闭环控制。同时,位置信号从测速系统传输到控制系统的过程存在一定的延时,需要对其进行补偿,如图18b所示。
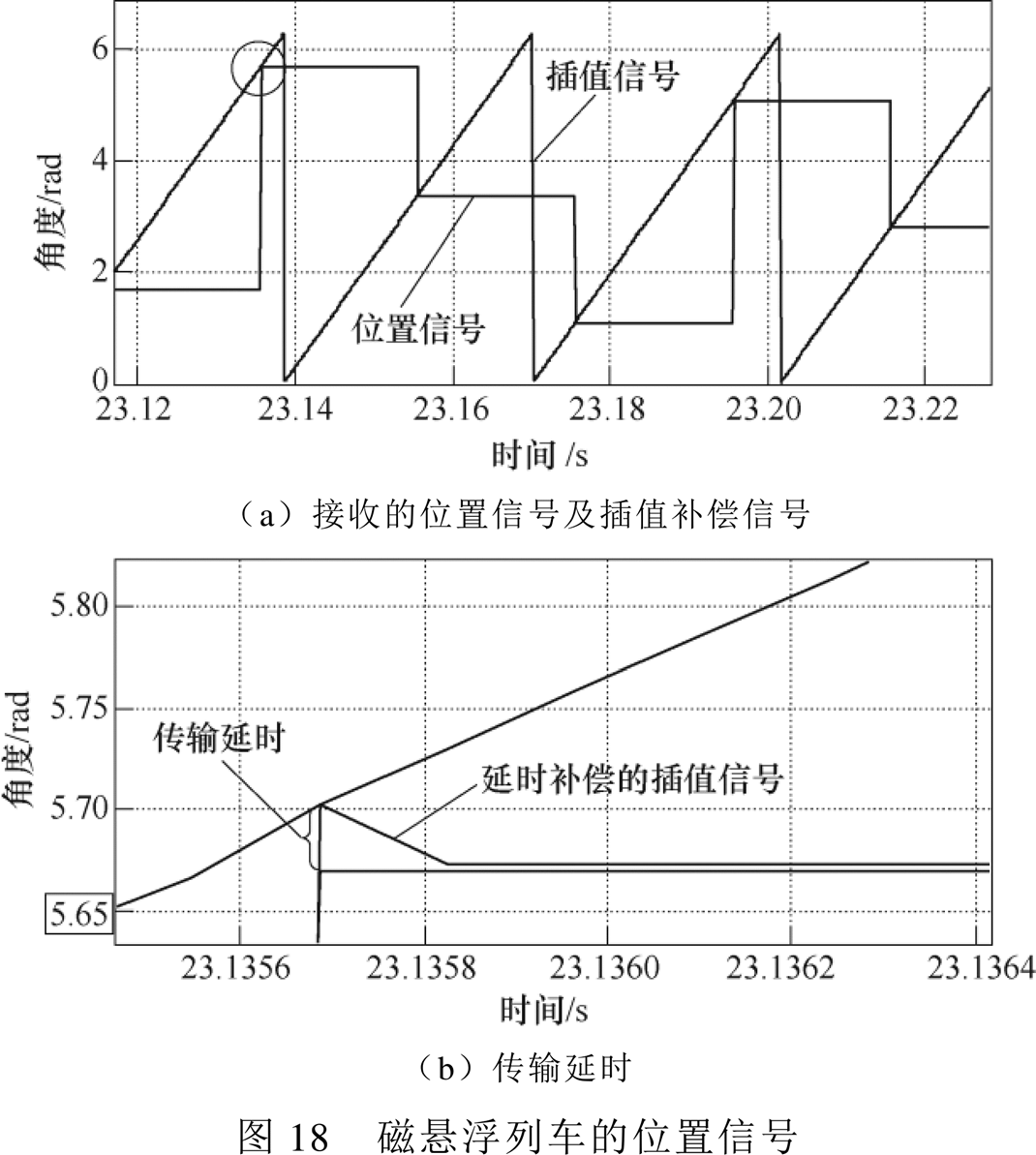
Fig.18 The position signal of maglev train
本文以磁悬浮列车的牵引控制系统为研究对象,介绍了基于RT-LAB的硬件在环实时仿真平台,并详细阐述了平台的构架,以及变流器模型和电机模型的建模原理,并在该平台上对高速磁悬浮的相关控制策略进行了实验验证。实验结果表明,所搭建的硬件在环实时仿真平台是正确的,所采用的控制策略也是有效的,对于在实验室中开展高速磁悬浮牵引控制的理论研究有重要意义。
参考文献
[1] 吴祥明. 磁悬浮列车[M]. 上海: 上海科学技术出版社, 2003.
[2] 葛琼璇. 高速磁悬浮列车用牵引变流器系统及牵引控制技术研究[D]. 北京: 中国科学院电工研究所, 2006.
[3] Lu Bin, Wu Xin, Figueroa H, et al. A low-cost real- time hardware-in-the-loop testing approach of power electronics controls[J]. IEEE Transactions on Indu- strial Electronics, 2007, 54(2): 919-931.
[4] 卢子广, 柴建云, 王祥珩, 等. 电力驱动系统实时控制虚拟实验平台[J]. 中国电机工程学报, 2003, 23(4): 119-123.
Lu Ziguang, Chai Jianyun, Wang Xiangheng, et al. Virtual test platform for real-time control of electrical drives[J]. Proceedings of CSEE, 2003, 23(4): 119- 123.
[5] 李秋硕, 张剑, 肖湘宁, 等. 基于RTDS的机电电磁暂态混合实时仿真及其在FACTS中的应用[J]. 电工技术学报, 2012, 27(3): 219-226.
Li Qiushuo, Zhang Jian, Xiao Xiangning, et al. Electromechanical-electromagnetic transient real- time simulation based on RTDS and its application to FACTS[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 219-226.
[6] Champagne R, Dessaint L A, Fortin-Blanchette H, et al. Analysis and validation of a real-time AC drive simulator[J]. IEEE Transactions on Power Electro- nics, 2004, 19(2): 336-345.
[7] 丁荣军, 桂卫华, 陈高华. 电力机车交流传动系统的半实物实时仿真[J]. 中国铁道科学, 2008, 29(4): 96-102.
Ding Rongjun, Gui Weihua, Chen Gaohua. HIL real-time simulation of electric locomotive AC drive system[J]. China Railway Science, 2008, 29(4): 96- 102.
[8] 李晓庆. 基于dSPACE永磁同步电机模型参考模糊自适应方法研究[D]. 无锡: 江南大学, 2005.
[9] Matar M, Iravani R. Massively parallel implement- ation of AC machine models for FPGA based real time simulation of electromagnetic transients[J]. IEEE Transactions on Power Delivery, 2011, 26(2): 830-840.
[10] 刘金鑫, 葛琼璇, 王晓新, 等. 高速磁浮牵引控制系统半实物实验研究[J]. 电工技术学报, 2015, 30(14): 497-503.
Liu Jinxin, Ge Qiongxuan, Wang Xiaoxin, et al. Hardware-in-loop research of traction-system for high-speed maglev[J]. Transactions of China Electro- technical Society, 2015, 30(14): 497-503.
[11] Tavana N R, Dinavahi V. Real-time FPGA-based analytical space harmonic model of permanent magnet machines for hardware-in-the-loop simula- tion[J]. IEEE Transactions on Magnetics, 2015, 51(8): 1-9.
[12] 年珩, 陈亮. 基于三电平变流器的单边可控开绕组永磁同步发电机系统控制技术[J]. 中国电机工程学报, 2016, 36(22): 6238-6245.
Nian Heng, Chen Liang. Control techniques of open winding PMSG systems fed by integration of three level NPC converters and diode bridges[J]. Pro- ceedings of the CSEE, 2016, 36(22): 6238-6245.
[13] 殷正刚. 大功率三电平逆变器脉宽调制及磁场定向控制研究[D]. 北京: 中国科学院电工研究所, 2012.
[14] 于亚男, 金阳忻, 江全元, 等. 基于RT-LAB的柔性直流配电网建模与仿真分析[J]. 电力系统保护与控制, 2015, 43(19): 126-129.
Yu Yanan, Jin Yangxin, Jiang Quanyuan, et al. RT-LAB based modeling and simulation analysis of flexible DC distribution network[J]. Power System Protection and Control, 2015, 43(19): 126-129.
[15] Hazra S, Sensarma P. Vector approach for self- excitation and control of induction machine in stand-alone wind power generation[J]. IEEE Transa- ctions on Renewable Power Generation, 2011, 5(5): 397-405.
[16] 王娟. 磁悬浮列车用长定子直线同步电机特性研究与故障分析[D]. 北京: 中国科学院电工研究所, 2004.
[17] 李洋, 史黎明, 李耀华. 直线同步电机牵引系统实物在环实时仿真算法[J]. 电工技术学报, 2013, 28(增刊1): 363-370.
Li Yang, Shi Liming, Li Yaohua. Hardwar-in-loop platform for high-speed maglev traction system[J]. Transactions of China Electrotechnical Society, 2013, 28(S1): 363-370.
[18] Abourida S, Bélanger J, Dufour C. Real-time HIL simulation of a complete PMSM drive at 10/spl mu/s time step[C]//European Conference on Power Elec- tronics and Applications, Dresden, 2005, DOI: 10. 1109/EPE.2005.219587.
[19] 孙鹏琨, 葛琼璇, 王晓新, 等. 磁悬浮列车在双端供电模式下的无速度传感器控制[J]. 电工技术学报, 2018, 33(18): 73-80.
Sun Pengkun, Ge Qiongxuan, Wang Xiaoxin, et al. Speed sensorless control of maglev train with double-end power supply[J]. Transactions of China Electrotechnical Society, 2018, 33(18): 73-80.
[20] 张波, 葛琼璇, 刘金鑫, 等. 基于扩展反电动势法的长定子直线同步电机无速度传感器控制研究[J]. 电工技术学报, 2017, 32(23): 91-99.
Zhang Bo, Ge Qiongxuan, Liu Jinxin, et al. Research on speed sensorless control of long stator linear synchronous motor based on EEMF[J]. Transactions of China Electrotechnical Society, 2017, 32(23): 91-99.
Traction Control Strategy of High-Speed Maglev Train Based on Hardware-in-the-Loop Real-Time Simulation Platform
Abstract Electromagnetic suspension (EMS) maglev trains are driven by long stator linear synchronous motors (LSM). Due to the complicated construction and high cost of the high-speed operation environment, there are many difficulties in the actual construction of the maglev experimental line. In order to carry out research on high-speed maglev traction technology in the laboratory, it is necessary to build a hardware-in-the-loop real-time simulation system. The simulation platform is introduced based on RT-LAB simulator in this paper, including back-to-back three level converter, long stator linear synchronous motor and traction control system, which can verify the performance of high-speed maglev control system, traction control strategy and system interface. It is of great value for mastering the core technology of high-speed maglev traffic.
keywords:Electromagnetic suspension maglev train, long stator linear synchronous motor, hardware-in-the-loop, real-time simulation platform, RT-LAB
中图分类号:TM315
DOI: 10.19595/j.cnki.1000-6753.tces.190823
国家重点研发计划高速磁浮交通系统关键技术研究课题资助项目(2016YFB1200602-20)。
收稿日期 2019-07-02
改稿日期 2019-08-27
孙鹏琨 男,1992年生,博士,研究方向大功率电力电子与直线驱动技术。E-mail: sunpengkun@mail.iee.ac.cn
葛琼璇 女,1967年生,研究员,博士生导师,研究方向为高压大功率变流器控制技术、高性能电机牵引控制技术。E-mail: gqx@mail.iee.ac.cn(通信作者)
(编辑 崔文静)