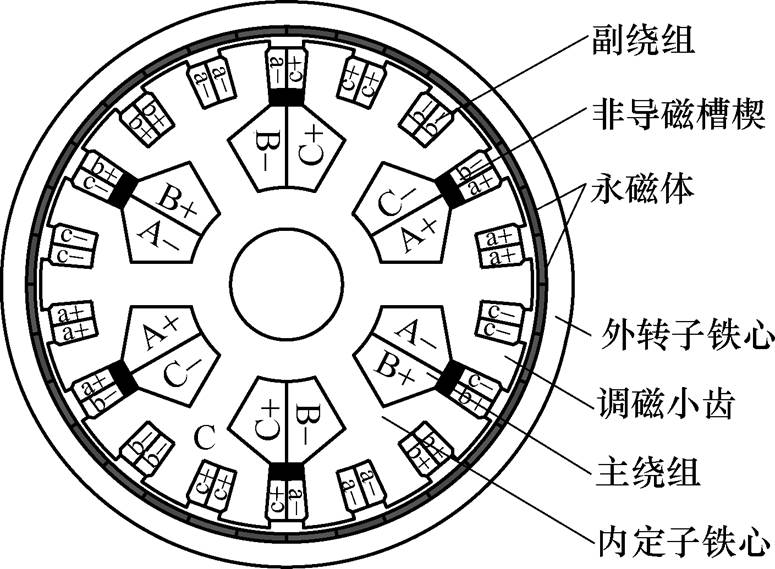
图1 FMDF-HE电机结构
Fig.1 Configuration of FMDF-HE motor
摘要 基于磁场调制原理工作的永磁(PM)游标电机具有低速、大转矩特性。然而,和传统永磁电机类似,永磁游标电机的励磁磁场由永磁体产生,气隙磁场相对恒定难以调节,宽调速范围运行能力受限。结合“混合励磁”设计方法,通过在分裂齿式永磁游标电机调磁小齿间引入混合励磁绕组,该文研究了一种磁场调制型双馈无刷混合励磁电机;结合有限元方法,介绍了该电机的基本结构和运行原理,揭示了其低速、大转矩并具有宽调速范围特性内在机理;设计了该电机的驱动控制系统,对其静态性能进行系统测试,验证了理论分析与仿真计算的正确性。
关键词:磁场调制 混合励磁 双馈 轮毂电机
作为电动汽车核心部件,电机系统性能直接影响电动汽车的整车性能。永磁电机具有转矩/功率密度高、损耗小和输出转矩平滑等特点,已成为电动汽车驱动电机的首选[1-2],但永磁电机的励磁磁场由永磁体直接产生且相对恒定,基于矢量控制等策略的弱磁控制对其励磁磁场的调节范围有限,增加了电动汽车宽范围高效运行的难度。混合励磁电机通过增加一套励磁绕组产生额外的电励磁磁场,与永磁磁场叠加后形成可灵活调节的总励磁磁场,因此具有高效、高功率密度和宽调速范围等特性[2-4]。
现有的混合励磁电机通常在励磁绕组中通入直流励磁电流,并产生与励磁绕组相对静止的电励磁磁场,因此,相对于转子永磁电机而言,最直接的混合励磁方案是将励磁绕组直接绕制在转子上,并随转子和永磁体一起旋转,然而,该方案无疑会引入集电环电刷结构。为此,张卓然教授等提出并研究了一类具有转子磁分路的混合励磁电机[5-6],通过延伸转子铁心为轴向励磁磁场提供磁路,实现了切向充磁转子型混合励磁电机无刷化。文献[7]提出了一种交替极转子的混合励磁电机,在此基础上,王东教授等提出了一种具有分段转子结构的混合励磁电机,该电机的两组励磁绕组轴向分布于定子铁心内,无需集电环、电刷实现了较好的调压性能,并就其复杂三维磁路结构提出并研究了等效二维磁路模型[8]。近年来,定子永磁型电机由于其简单的转子结构等特点引起了国内外学者的广泛关注[9-11],该类电机的永磁体和电枢绕组均位于电机定子,这一特殊结构为增设励磁绕组并实现无刷化混合励磁提供了十分便利的条件[12-13]。然而,这一类混合励磁电机中,永磁体、电枢绕组和励磁绕组均位于电机定子上,不仅导致了三者空间上的严重竞争,而且使得该类电机热源相对集中,增加了其温升处理的难度。
另一方面,采用轮毂电机等方案实现电动汽车的直接驱动,是改善电动汽车运行效率、降低动力系统复杂性的有效手段之一[14]。由于车轮的运行速度相对较低,基于磁场调制原理运行并具有低速大转矩特点的磁场调制型永磁电机已成为本领域的研究热点,包括美国威斯康辛大学[15]、英国谢菲尔德大学[16]、香港大学[17]、哈尔滨工业大学[18]、东南大学[19]、华中科技大学[20]等高校的学者均对该类电机展开了系统研究,其潜在应用主要包括电动汽车、风力发电等领域。然而,与普通永磁电机一样,磁场调制型永磁电机仍然具有励磁磁场调节困难、高效运行范围受限的问题。
结合混合励磁和磁场调制永磁电机,文献[21]提出了一种磁场调制型双馈无刷混合励磁(Mag- netic Field-Modulated Double-Fed Brushless Hybrid Excited, FMDF-HE)电机,并对该电机的拓扑结构和基本电磁特性进行了讨论和分析。通过在调磁小齿上绕制一套三相副绕组,构成特殊的双交流绕组结构,并基于双馈电驱动方式,FMDF-HE电机不仅继承了磁场调制电机低速大转矩的特点,适用于轮毂电机等直驱式场合,还可以通过对副绕组电流的控制,方便实现弱磁扩速和双绕组大转矩等多模式运行,为实现电动汽车宽调速范围高效运行提供了有益思路。文献[22]在交替极永磁电机基础上增加一套交流励磁绕组实现了良好的磁场调节性能,进一步证明了交流励磁方案的可行性。
本文介绍了FMDF-HE电机拓扑结构和运行原理;针对其双交流绕组特点分析了该电机在不同运行模式下的各项电磁性能;试制了样机,进行了必要的测试,证明了电机具有磁场调节灵活和低速大转矩输出特点,验证了理论分析与有限元仿真的正确性。
FMDF-HE电机结构如图1所示,FMDF-HE电机采用外转子结构,其转子由永磁体和转子铁心组成,转子内侧表贴径向充磁的永磁体,且相邻永磁体充磁方向相反。内定子铁心采用分裂齿结构,包含用来绕制主绕组的6个定子大齿和每个定子大齿极靴表面设置的3个调磁小齿,18个小齿一方面用来对磁场进行调制,另一方面用于绕制三相副绕组,提高了电机内部空间的利用率。
图1 FMDF-HE电机结构
Fig.1 Configuration of FMDF-HE motor
FMDF-HE电机属于磁场调制型电机,其绕组极对数、调磁小齿个数以及永磁体极对数应满足
 (1)
(1)式中,Nst为调磁小齿个数;pr为永磁体极对数;pa和pf分别为主、副绕组极对数。本文中,极对数配 比为
 (2)
(2)
一方面,FMDF-HE电机基于磁场调制原理运行,即由内定子上调磁小齿对永磁磁场的调制产生有效谐波磁场,其极对数pef与机械旋转转速wef 满足
 (3)
(3) (4)
(4)
式中,wr为转子的机械角速度;Gr为磁齿轮变比。
为产生稳定转矩,电机的主绕组应根据有效谐波磁场进行绕制,即其极对数pa=pef,且主绕组电流频率fa及其产生的电枢反应磁场的机械角速度wa应为
 (5)
(5)以满足电枢反应磁场与上述调制产生的有效谐波同步旋转。由此可见,只需要对pf、Nst等参数进行合理的选取,就能实现电枢反应磁场转速高于转子转速,两者之间存在转速比Gr,即FMDF-HE电机利用自身的结构特点实现了“自减速”功能,这也是磁场调制电机实现低速大转矩特性的实质原因。
另一方面,为了实现FMDF-HE电机有效的弱磁运行,其电励磁磁场与有效谐波磁场必须满足三个条件,即:相同的极对数、保持相对静止、相位相反。然而,FMDF-HE电机的永磁体在转子上随着转子转动,故需在静止的副绕组中通入三相对称交流电流,以产生相对于副绕组旋转的电励磁磁场,且其频率、相位必须根据转子的转速和位置实时计算。而当车辆需要爬坡、急加速等大转矩工况时,FMDF-HE电机则又需要切换至双绕组大转矩工况,此时,副绕组中应通入与主绕组一样的电枢电流,以尽可能产生转矩。因此,副绕组设计时应满足如下条件:
(1)副绕组可按FMDF-HE电机的有效谐波极对数进行设计,其极对数pf可以表示为
 (6)
(6)(2)不论FMDF-HE电机运行于弱磁还是双绕组大转矩工况,副绕组产生的磁场应始终与上述有效谐波永磁磁场同步旋转,故通入副绕组的电流频率ff可以表示为
 (7)
(7)
式中,wf为电励磁磁场的机械角转速。
(3)副绕组电流的初始相位必须满足
 (8)
(8)式中,qa0、qf0和qfa分别为主、副绕组电流的初始相位和两套绕组之间的机械相位差。因此,本文中FMDF-HE电机具有三种基本运行模式,即:永磁体单独励磁(模式Ⅰ)、副绕组弱磁扩速(模式Ⅱ)和双绕组大转矩(模式Ⅲ),以适应电动汽车正常运行、高速巡航和低速起动爬坡等复杂运行工况。
采用二维有限元软件对FMDF-HE电机的基本电磁特性进行了计算和分析。关键参数见表1。必须指出的是,由于本文中的FMDF-HE电机转子采用表贴式永磁体,在忽略铁心饱和情况下,该电机电感几乎不随转子位置发生变化,因此本文采用id=0的驱动方法对主绕组及双绕组大转矩工况下的副绕组进行加载,以获取电流的最大利用率。
表1 FMDF-HE电机关键参数
Tab.1 Key parameters of FMDF-HE motor

参 数数 值 外转子外径/mm206 内转子外径/mm176 轴向长度/mm80 转子转速/(r/min)600 气隙长度0.5 定子大齿数6 主绕组相数3 主绕组半槽面积/mm2352 主绕组槽满率(%)49.47 主绕组匝数104
(续)
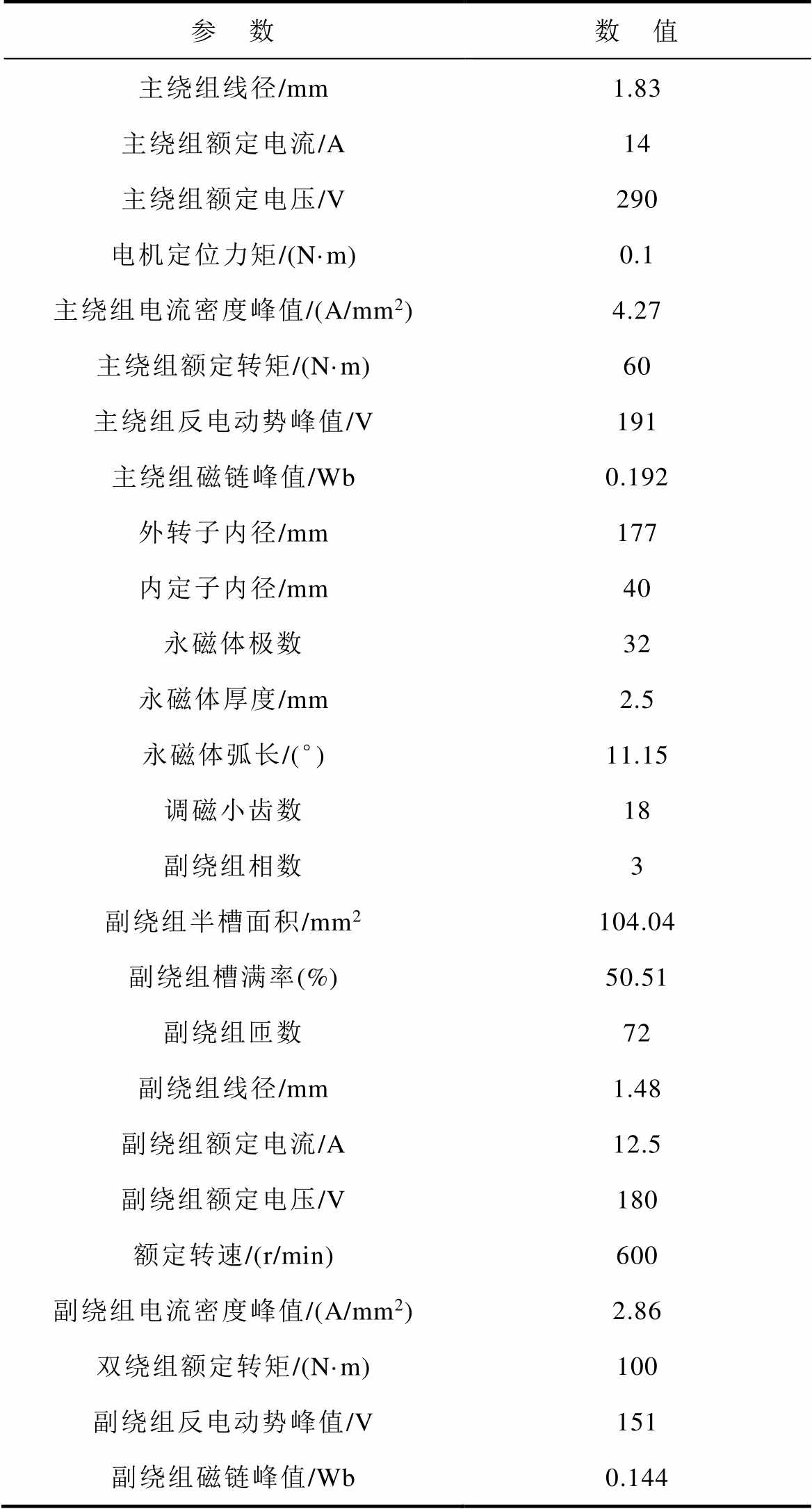
参 数数 值 主绕组线径/mm1.83 主绕组额定电流/A14 主绕组额定电压/V290 电机定位力矩/(N·m)0.1 主绕组电流密度峰值/(A/mm2)4.27 主绕组额定转矩/(N·m)60 主绕组反电动势峰值/V191 主绕组磁链峰值/Wb0.192 外转子内径/mm177 内定子内径/mm40 永磁体极数32 永磁体厚度/mm2.5 永磁体弧长/(°)11.15 调磁小齿数18 副绕组相数3 副绕组半槽面积/mm2104.04 副绕组槽满率(%)50.51 副绕组匝数72 副绕组线径/mm1.48 副绕组额定电流/A12.5 副绕组额定电压/V180 额定转速/(r/min)600 副绕组电流密度峰值/(A/mm2)2.86 双绕组额定转矩/(N·m)100 副绕组反电动势峰值/V151 副绕组磁链峰值/Wb0.144
图2为不同励磁情况下的磁场分布,图2a为永磁体单独励磁情况下磁场分布,可以看出,除部分永磁磁通经调磁小齿短路外,剩余的磁通经内定子大齿与主绕组匝链,并呈现两对极分布。图2b为仅副绕组通入弱磁电流时产生的电励磁磁场,虽然该磁场与永磁磁场在转子和调磁小齿内的分布不同,但两者在内定子大齿中的分布却完全一致,故可以通过调节副绕组中励磁电流的大小实现弱磁控制。图2c和图2d分别为主、副绕组均基于id=0驱动方法通电时产生的电枢反应磁场,由于两套绕组均按照有效谐波磁场进行绕制,因此它们产生的电枢反应磁场分布也完全相同,并可以以此实现双绕组大转矩运行。
对FMDF-HE电机不同励磁情况下的气隙磁通密度进行分析。图3a为永磁体单独励磁情况下的气隙磁通密度和其对应的谐波频谱,包含3种主要谐波分量,即2次、16次以及34次,其中16次分量的幅值最大,为1.03T,2次和34次分量幅值相对较小,其幅值分别为0.192T和0.212T。图3b所示为仅副绕组加载弱磁电流产生的电励磁磁场气隙磁通密度及谐波分析。由于副绕组极对数为2,从频谱分析图可以看出,2次谐波的幅值最大,幅值为0.140T,幅值次大的16次和34次谐波分量幅值分别为0.044T和0.018T。图3c为混合励磁(弱磁)情况下的气隙磁通密度波形及其相应的谐波频谱。可见,受电励磁磁场的弱磁作用,相比于永磁磁场而言,混合励磁磁场中的2次谐波幅值明显减小,为0.053T,降幅为72.33%,而34次谐波分量幅值则略有增加,为0.229T。
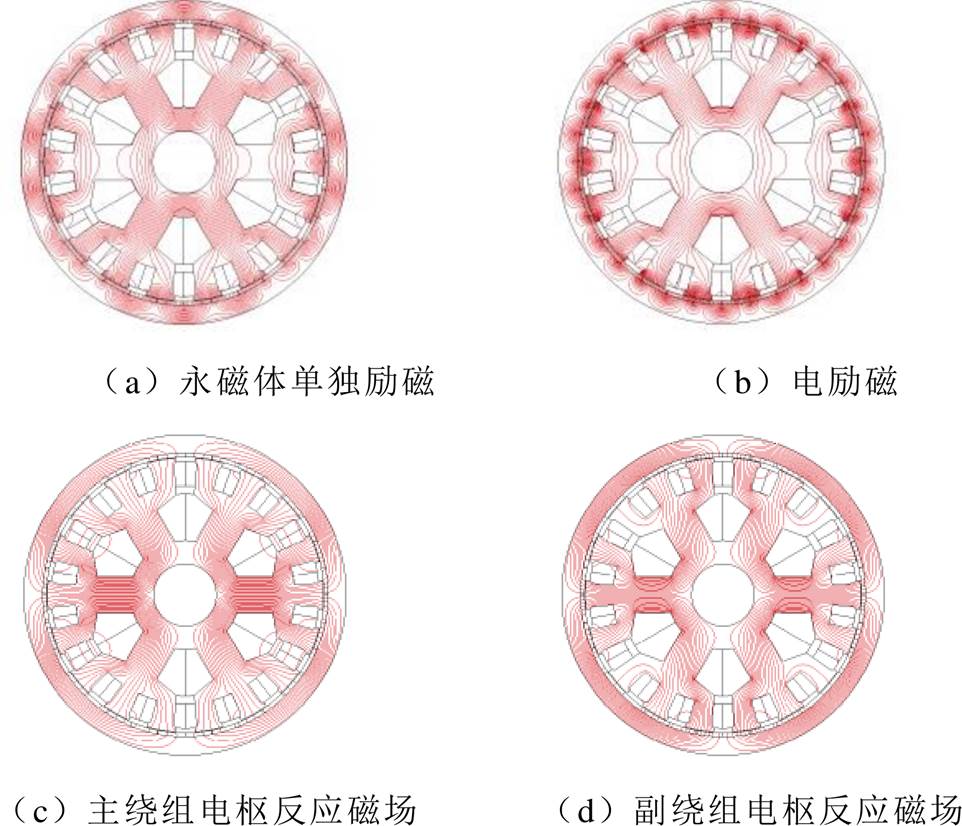
图2 不同励磁情况下的磁场分布
Fig.2 Magnetic field distributions with different excitations

图3 不同励磁情况下的气隙磁通密度及其相应的谐波分析
Fig.3 Airgap flux density with different excitations and corresponding harmonic spectra
图4为永磁体单独励磁和仅副绕组单独产生的弱磁磁场中,上述3种谐波分量的相位随转子位置的变化情况。可见,两个励磁源产生的2次谐波、16次谐波同步旋转且相位始终相差180°,而两者产生的34次谐波则始终保持同相位,这与图3中3种主要谐波幅值的变化规律完全一致。
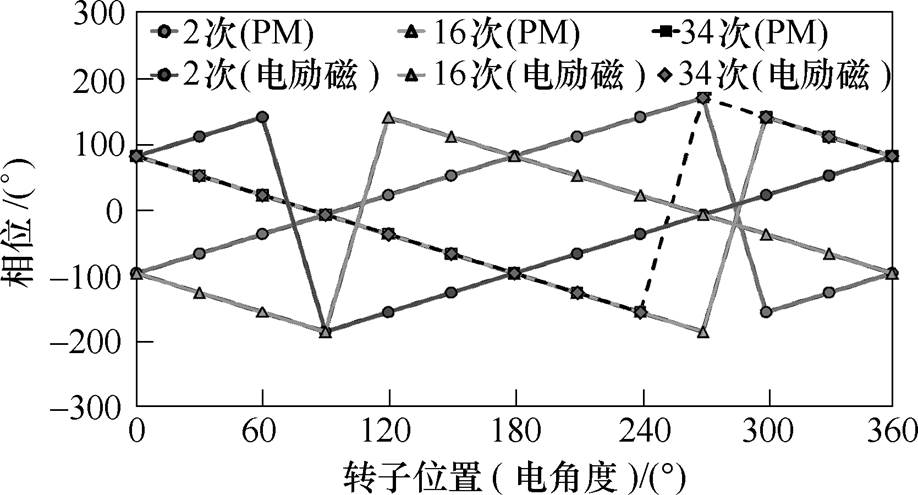
图4 永磁和电励磁磁场主要谐波相位变化
Fig.4 Phases of main harmonics of PM and wound field
对电机运行于双绕组大转矩模式时,主、副绕组产生的电枢反应磁场气隙磁通密度进行分析。图5a为仅主、副绕组单独通电及共同作用情况时的气隙磁通密度波形,可见,主、副绕组单独产生的气隙磁通密度波形趋势几乎一致,仅在幅值上存在差异。图5b为三者的谐波分析,可见,当电机工作双绕组大转矩模式时,主、副两套绕组产生的磁场均主要包含2次、16次谐波,且两套绕组共同工作时产生的磁场中2次和16次谐波基本等于两套绕组独立工作时相应谐波之和,此时,主、副两套绕组均承担电枢绕组的作用,实现FMDF-HE电机双绕组大转矩运行。
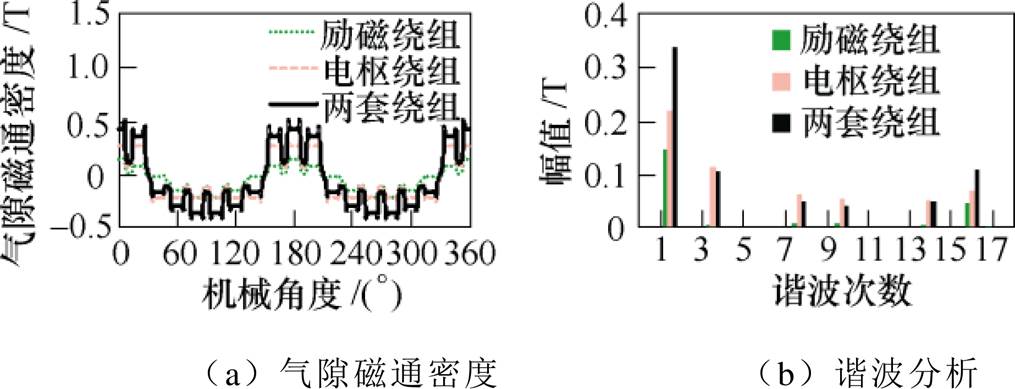
图5 不同电枢反应磁场气隙磁通密度及其相应的谐波分析
Fig.5 Airgap flux density of armature reaction magnetic field and corresponding harmonic spectra
图6为在永磁体励磁,且副绕组中通入不同幅值的d轴和q轴电流时,主绕组的空载感应电动势波形。由于该电机基于磁场调制原理运行,其感应电动势正弦度很高[18]。如图6a所示,当副绕组作为电励磁绕组通入d轴电流时,主绕组感应电动势增量几乎与副绕组电流呈线性关系,定义弱磁系数为
 (9)
(9) 式中,ePM和e- 分别为永磁励磁和最小弱磁时的空载感应电动势峰值,当副绕组通入d轴弱磁电流时,弱磁率可达48.16%。如图6b所示,当副绕组作为电枢绕组通入q轴电流时,主绕组的感应电动势并无明显变化,进一步验证了当副绕组通入不同电流时,FMDF-HE电机可以有效工作于弱磁升速和双绕组大转矩模式。
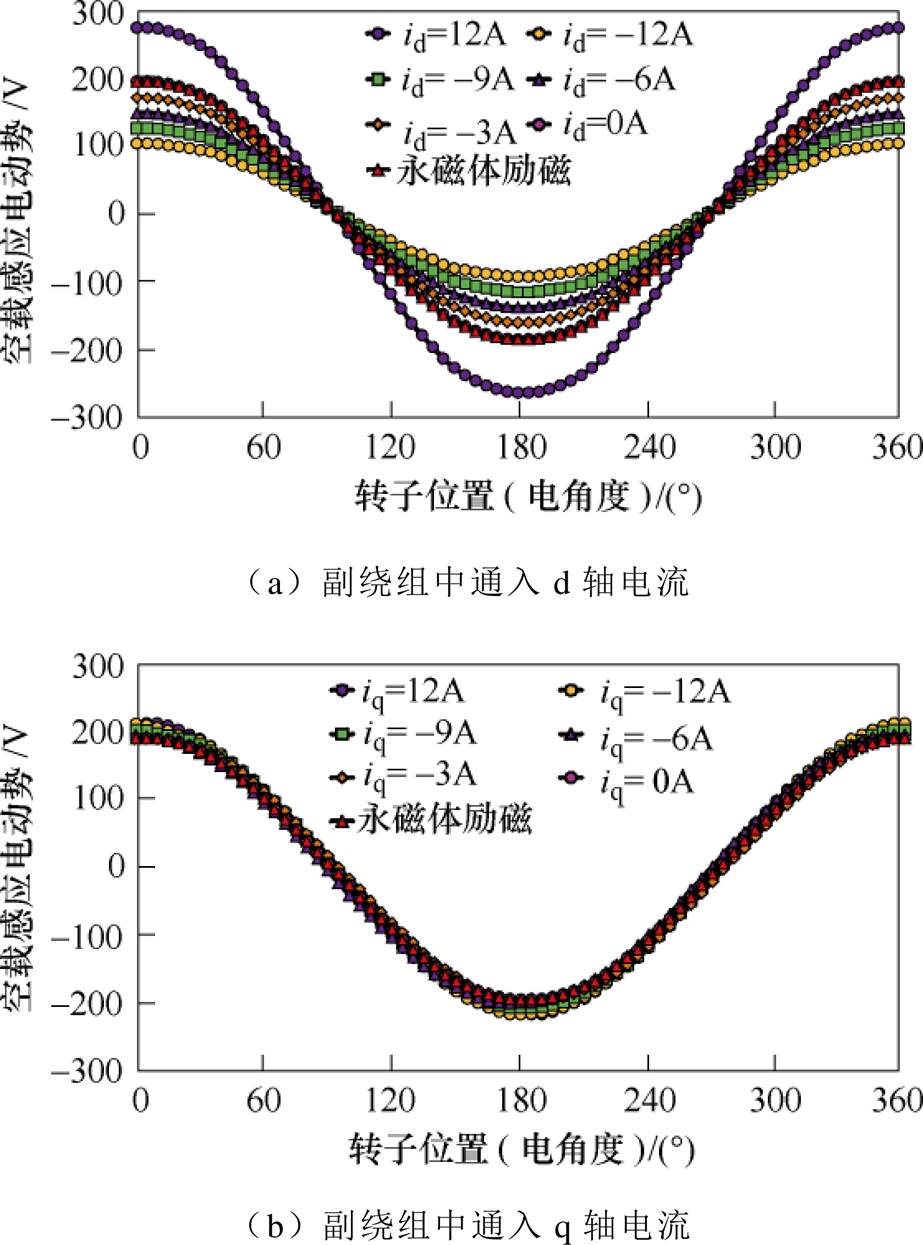
图6 不同励磁电流情况下A相中感应出的感应电动势
Fig.6 No-load EMF in phase A under different excitations
忽略电流换向产生的扰动转矩,永磁电机的电磁转矩由永磁转矩、磁阻转矩及定位力矩组成。不同励磁电流时的定位力矩波形如图7所示。由图7可知,该电机定位力矩很小,可忽略不计;交直轴电感如图8所示,电机两套绕组的d、q轴电感基本不随转子位置变化,并且Ld1=Lq1,Ld2=Lq2,即其磁阻转矩几乎为零。需要说明的是,由于该电机中采用主、副两套绕组,两套绕组之间存在很强的互感,但该互感并不会对电机的输出转矩产生影响,故FMDF-HE电机的电磁转矩可以表示为
 (10)
(10) 式中,yPM1和yPM2分别为主、副绕组中永磁磁链的峰值;iq1和iq2分别为主、副绕组中q轴电流分量。
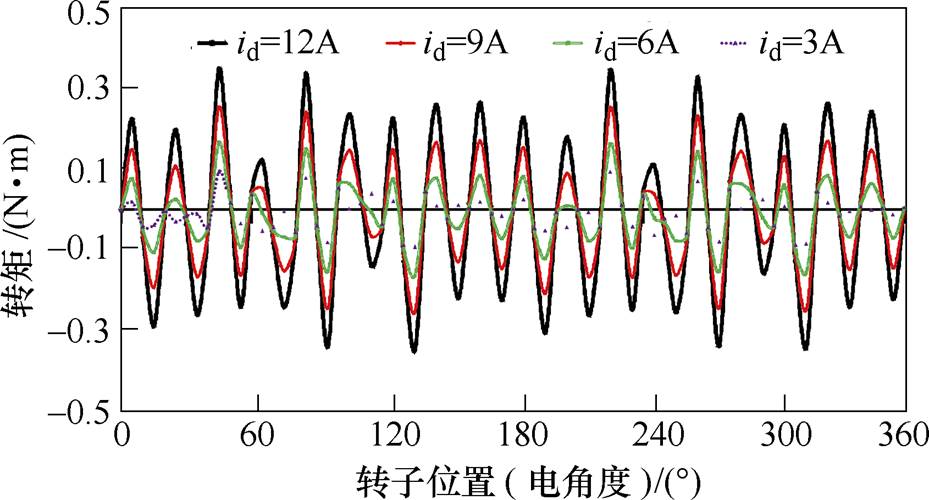
图7 不同励磁电流时的定位力矩波形
Fig.7 Cogging torque waveforms with different field current
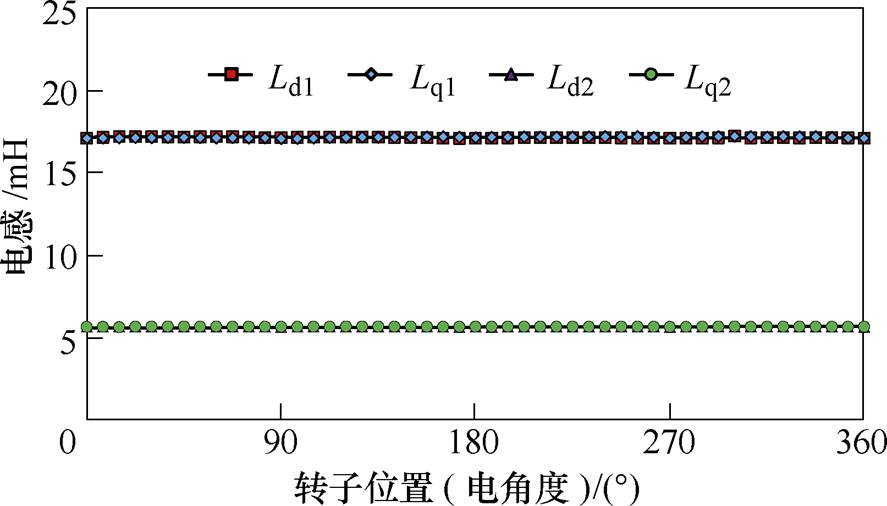
图8 交直轴电感
Fig.8 Inductance waveforms in d-q axis
不同模式下的转矩波形如图9所示。图9a所示为副绕组中通入不同的弱磁电流时,FMDF-HE电机转矩随主绕组iq的变化波形。可见,电机转矩与主绕组iq幅值呈线性增长,但几乎不受副绕组id的影响,与式(10)一致。换言之,FMDF-HE电机转矩不会由于基于副绕组的弱磁运行而降低,但主绕组两端电压却又能借助于副绕组的励磁磁场得到有效的控制,如图6a所示,这是该电机优于普通永磁电机和现有混合励磁电机之处。此外,由于相同的原因,FMDF-HE电机不采用基于副绕组的增磁运行,而采用主、副绕组均为电枢绕组的双绕组运行模式,以满足电动汽车的大转矩工况需求。图9b为分别在两套绕组中单独和共同通入额定iq时的电磁转矩波形。其中,仅主、副绕组单独作用时平均转矩分别为63.65N·m和44.01N·m,两套绕组作用时电机平均转矩的平均值为97.18N·m,即电机运行于双绕组工作模式时产生的电磁转矩与两套绕组分别作用时产生的转矩之和几乎一致,细微差别是由铁心的局部饱和导致,进一步验证了式(10)所示的转矩表达式。图10为电机不同工况下满载时的磁通密度云图,可见,模式Ⅰ和模式Ⅲ工况的磁通密度较模式Ⅱ饱和,但均在合理范围内。
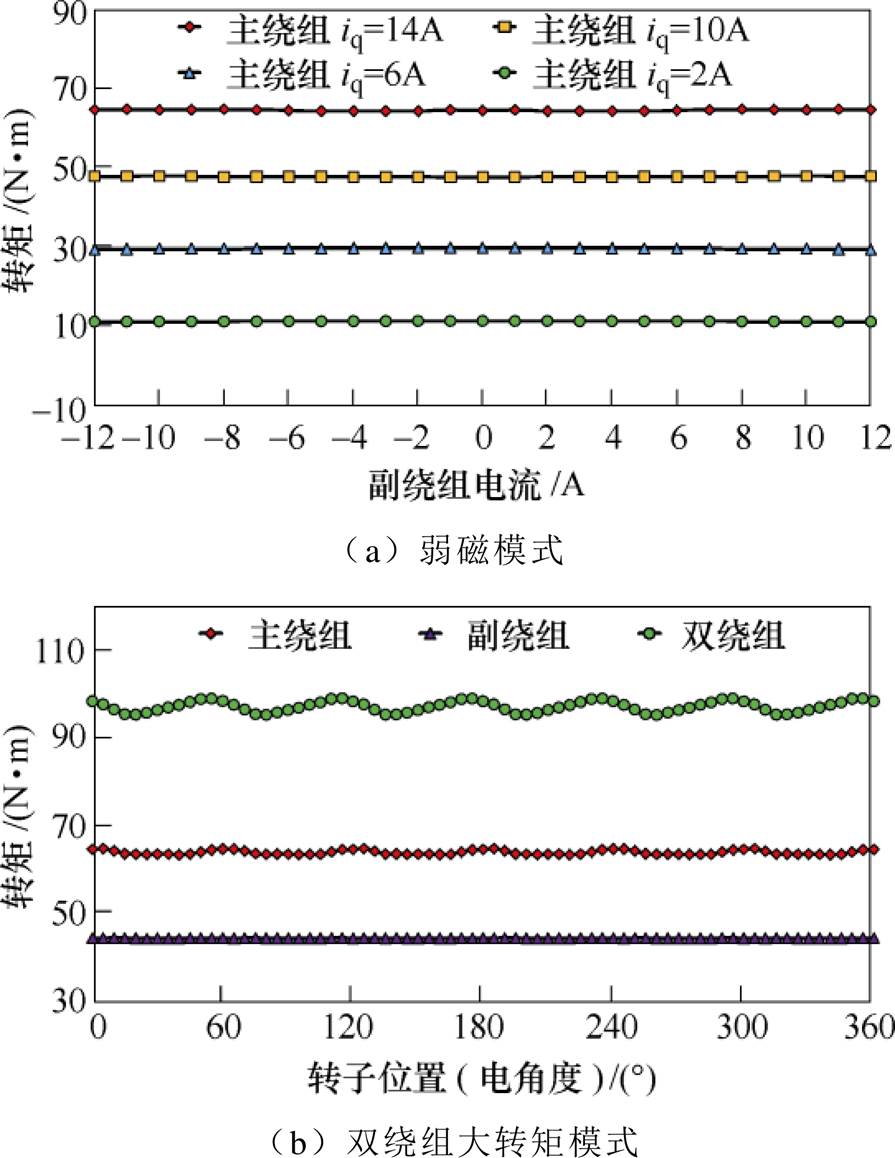
图9 不同模式下的转矩波形
Fig.9 Torque waveforms in different operating modes
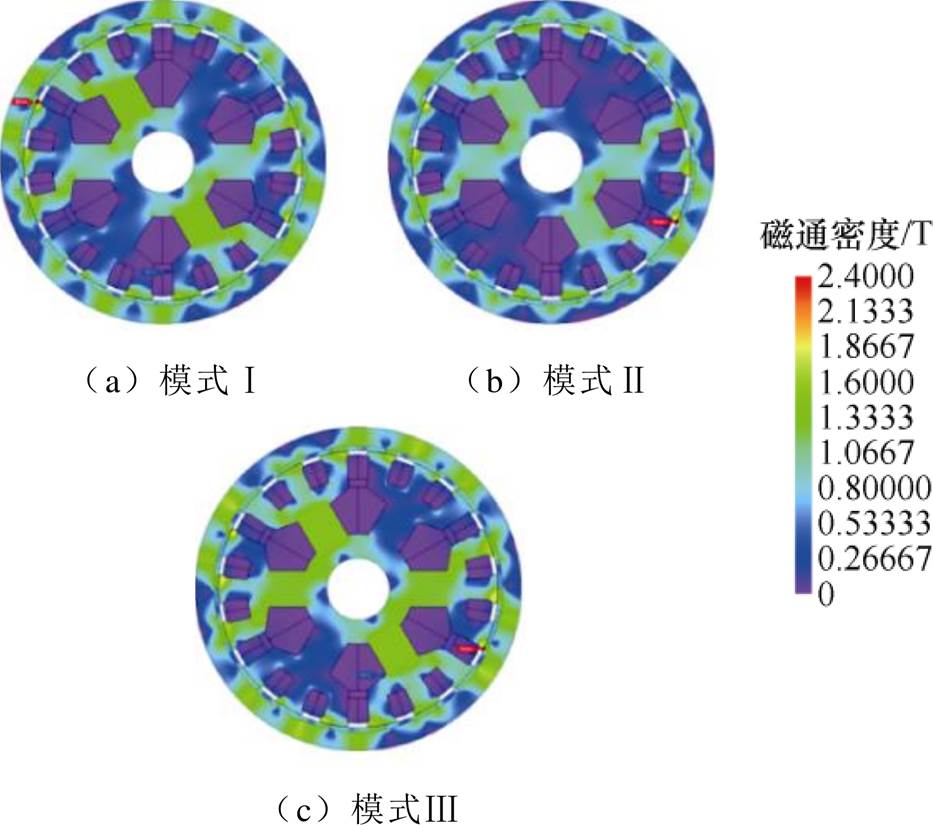
图10 不同满载运行情况下的电机磁通密度云图
Fig.10 Electromagnetic cloud map of motor under different full-load operation conditions
效率是电机的关键参数之一。表2为FMDF-HE电机在不同励磁情况下铁耗计算结果。忽略机械摩擦损耗和附加损耗值时,电机效率可以计算为
 (11)
(11)表2 不同励磁情况下FMDF-HE铁耗
Tab.2 Iron loss of FMDF-HE motor in different excitations (单位: W)
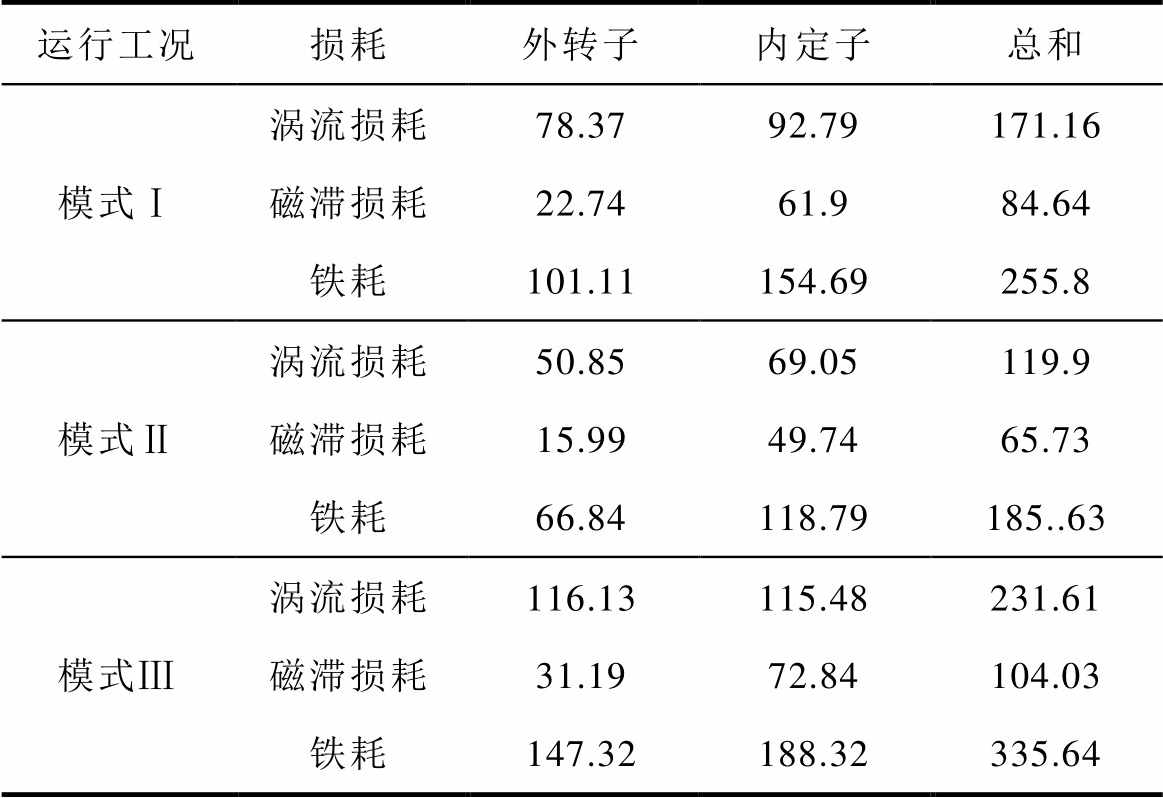
运行工况损耗外转子内定子总和 模式Ⅰ涡流损耗78.3792.79171.16 磁滞损耗22.7461.984.64 铁耗101.11154.69255.8 模式Ⅱ涡流损耗50.8569.05119.9 磁滞损耗15.9949.7465.73 铁耗66.84118.79185..63 模式Ⅲ涡流损耗116.13115.48231.61 磁滞损耗31.1972.84104.03 铁耗147.32188.32335.64
式中,Pout为电机输出功率;PCu为电机绕组的铜耗;PFe为电机的铁耗。表3汇总了FMDF-HE电机在三种工作模式下基速时刻的铁耗、铜耗、输出功率以及效率,可见相应的效率分别为93.29%、94.18%和94.34%。
表3 效率
Tab.3 Efficiency

运行模式铁耗/W铜耗/W输出功率/W效率(%) 模式Ⅰ255.855.634 333.0193.29 模式Ⅱ185.6277.224 386.08.94.34 模式Ⅲ335.6477.226 685.0094.18
图11为FMDF-HE电机机械特性曲线。其中,点1、点2分别对应该电机模式Ⅰ、Ⅱ两种运行模式时的满载点,可以发现,电机单绕组运行工况下,最高输出转矩约为60N·m,基速为600r/min。当引入副绕组后,电机基速增加为1 100r/min,并且点1、点2之间的转矩不变,有效扩大了电机的调速范围。
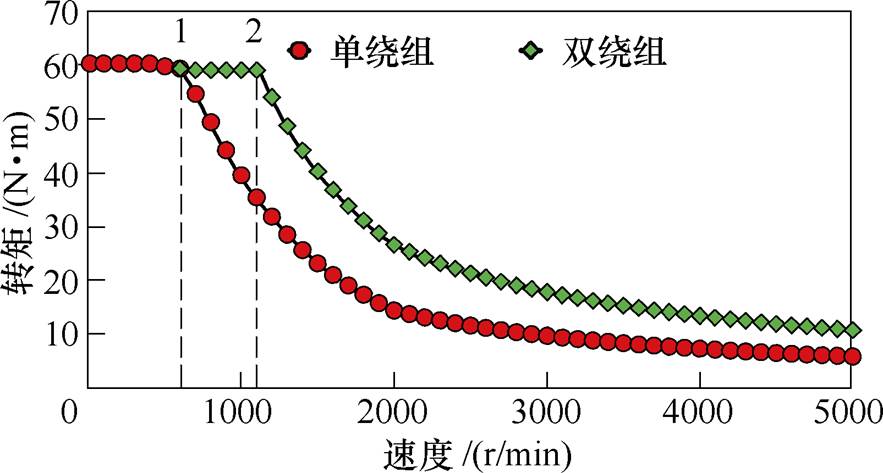
图11 FMDF-HE电机机械特性曲线
Fig.11 Mechanical characteristic curves of FMDF-HE motor
为验证理论分析和仿真计算的正确性,试制了FMDF-HE样机,如图12所示,并对样机进行了一系列的实验测试。
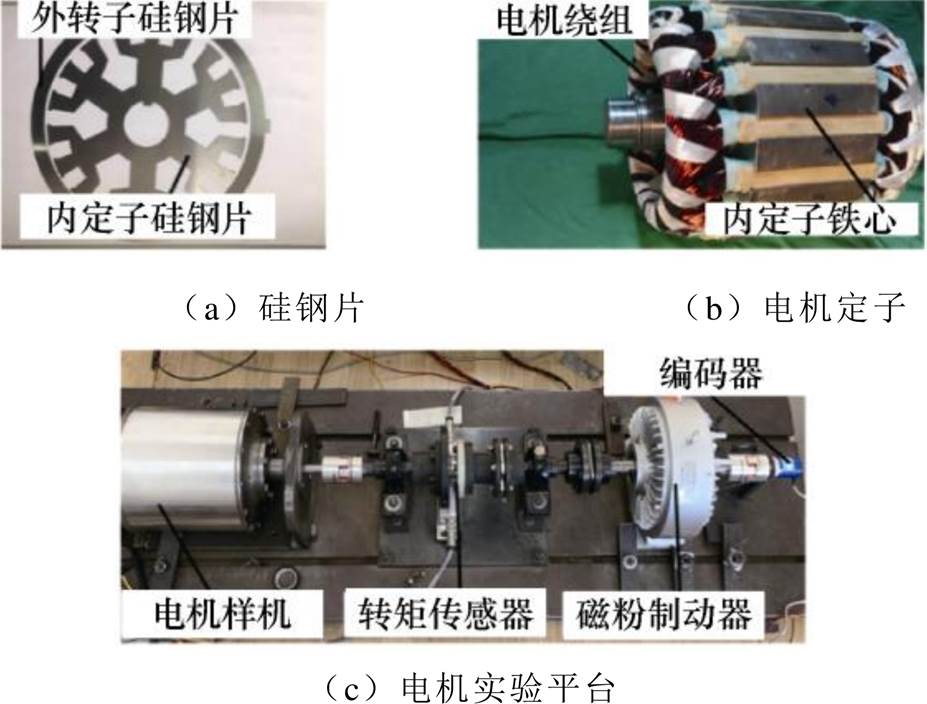
图12 FMDF-HE样机
Fig.12 Prototype and text platform of FMDF-HE motor
永磁励磁时实测空载感应电动势波形如图13所示。图13a和图13b为转速为300r/min时,电机主绕组与副绕组空载感应电动势,可以看出波形正弦度十分好并且对称,主副绕组空载感应电动势峰值约为94V和73V,分别为图13c有限元仿真的97.7%和97.3%。
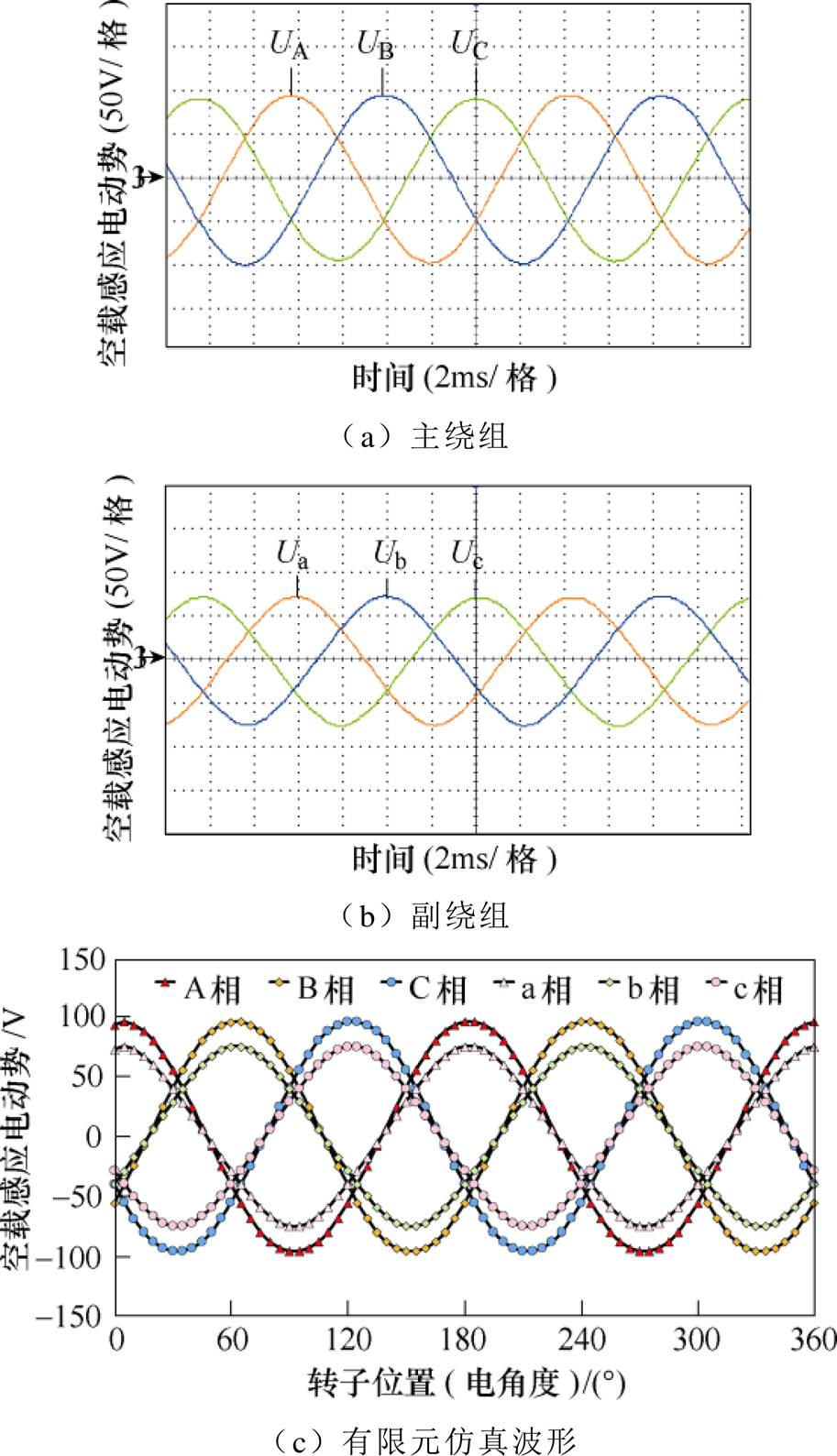
图13 永磁励磁时实测空载感应电动势波形
Fig.13 Measured no-load EMF waveforms
副绕组励磁时主绕组实测空载感应电动势波形如图14所示。图14a和图14b为电机转速为100r/min,副绕组通入id2=±12A时,电机主绕组的空载感应电动势,可以看出,电机副绕组通入电流前,电机主绕组空载感应电动势为31V,与有限元仿真数据一致,当副绕组通入id2=12A后,电机为增磁状态,使得电机主绕组空载感应电动势增加到42V,而副绕组通入id2= -12A后,电机为弱磁状态,电机主绕组空载感应电动势减小到17V,分别为有限元仿真结果的92.9%和102.3%。
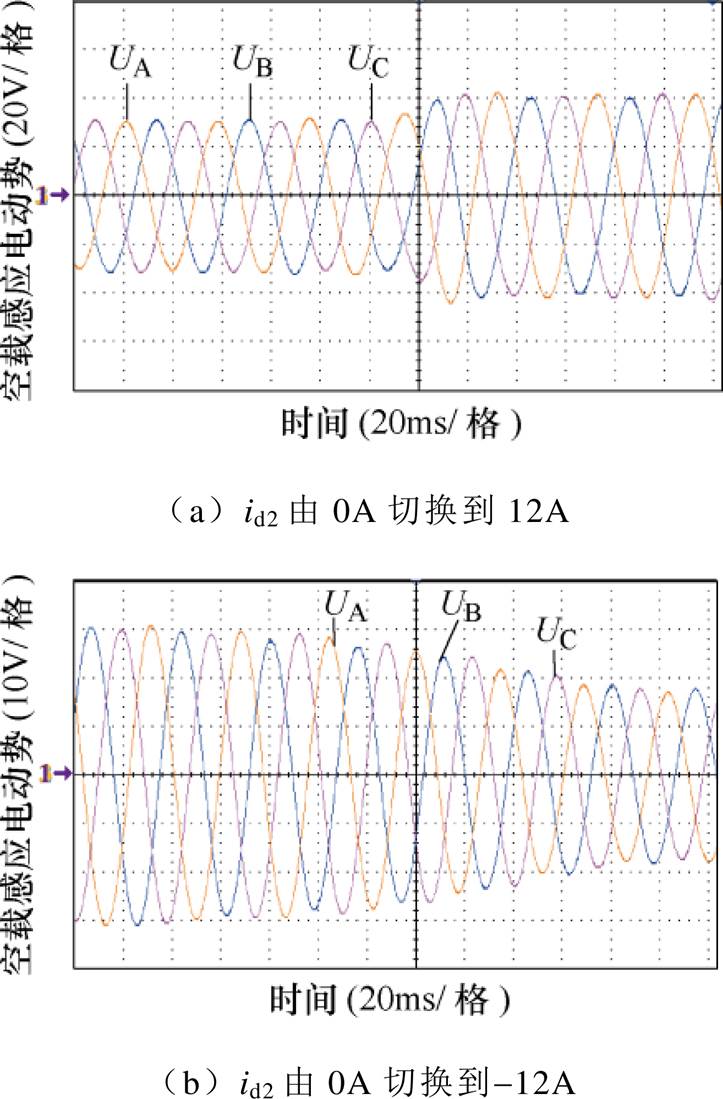
图14 副绕组励磁时主绕组实测空载感应电动势波形
Fig.14 Measured no-load EMF waveforms of primary winding with different secondary winding excitations
副绕组突加电流情况下主绕组电流及转矩波形如图15所示。图15a和图15b分别为恒定负载转矩情况下,由主绕组单独驱动且转速设定为100r/min时,分别在副绕组中突加iq2和id2分量,电机转矩及主、副绕组的电流波形。可见,由主绕组单独驱动时,主绕组三相电流峰值为7A,当副绕组突加iq2=3A分量后,主绕组三相电流峰值降至5A,说明副绕组iq2分量提供了一定的输出转矩,此时电机总的输出转矩为主绕组与副绕组输出转矩之和,然而当副绕组突加id2=5A分量后电机主绕组电流峰值并无明显变化,说明副绕组id2分量并不能提供转矩,对转矩没有影响,与理论分析与有限元仿真结果一致。

图15 副绕组突加电流情况下主绕组电流及转矩波形
Fig.15 Current of primary winding and torque waveforms with and without secondary winding current
本文研究了一种新型的磁场调制型双馈无刷混合励磁电机,该电机具有永磁体单独励磁、副绕组弱磁和双绕组大转矩三种工作模式。基于有限元仿真对电机的磁场分布、气隙磁通密度及谐波、空载感应电动势、电励磁情况下的感应电动势、电感、定位力矩和不同电流情况下的电机输出转矩进行了计算与分析。当副绕组通入直轴电流时能够对电机产生良好的弱磁效果,且副绕组中的直轴电流并不影响电机的输出转矩,使得FMDF-HE电机具有很宽的弱磁扩速区域;当副绕组通入交轴电流时,电机的输出转矩由主绕组与副绕组的电流共同产生,即FMDF- HE电机运行与双绕组大转矩模式。最后基于试制的样机进行了电机基本性能的测试,验证了理论分析与仿真计算的正确性。
参考文献
[1] Zhu Xiaoyong, Xiang Zixuan, Li Quan, et al. Multimode optimization design methodology for a flux-controllable stator permanent magnet memory motor considering driving cycles[J]. IEEE Transa- ctions on Industrial Electronics, 2018, 65(7): 5353- 5366.
[2] 符慧, 左月飞, 刘闯, 等. 永磁同步电机调速系统的一种变给定增益PI控制器[J]. 电工技术学报, 2017, 32(1): 168-174.
Fu Hui, Zuo Yuefei, Liu Chuang, et al. A variable input gain proportional integral controller for permanent magnetic synchronous motor speed- regulation system[J]. Transactions of China Electro- technical Society, 2017, 32(1): 168-174.
[3] 赵纪龙, 林明耀, 付兴贺, 等. 混合励磁同步电机及其控制技术综述和新进展[J]. 中国电机工程学报, 2014, 34(33): 5876-5887.
Zhao Jilong, Lin Mingyao, Fu Xinghe, et al. An overview and new progress of hybrid excited synchronous machines and control technologies[J]. Proceedings of the CSEE, 2014, 34(33): 5876-5887.
[4] 高宏伟, 杨贵杰, 刘剑. 五相永磁同步电机容错控制策略[J]. 电机与控制学报, 2014, 18(6): 61-65.
Gao Hongwei, Yang Guijie, Liu Jian. Fault-tolerant control strategy for five-phase permanent magnet synchronous motor[J]. Electric Machines and Control, 2014, 18(6): 61-65.
[5] 张晓祥, 张卓然, 刘业, 等. 双端励磁内置转子磁分路混合励磁电机设计与转子强度分析[J]. 电工技术学报, 2018, 33(2): 245-254.
Zhang Xiaoxiang, Zhang Zhuoran, Liu Ye, et al. Design and rotor strength analysis of a hybrid excitation synchronous machine with dual-direction built-in field windings[J]. Transactions of China Electrotechnical Society, 2018, 33(2): 245-254.
[6] Liu Ye, Zhang Zhuoran, Wang Chen, et al. Elec- tromagnetic performance analysis of a new hybrid excitation synchronous machine for electric vehicle applications[J]. IEEE Transactions on Magnetics, 2018, 54(11): 8204804.
[7] Tapia J A, Leonardi F, LipoT A. Consequent pole permanent magnet machine with extended field weakening capability[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1704-1709.
[8] 林楠, 王东, 魏锟, 等. 新型混合励磁同步电机的数学模型与等效分析[J]. 电工技术学报, 2017, 32(3): 149-156.
Lin Nan, Wang Dong, Wei Kun, et al. Mathematical model and equivalent analysis of a novel hybrid excitation synchronous machine[J]. Transactions of China Electrotechnical Society, 2017, 32(3): 149- 156.
[9] 吴中泽, 诸自强. 一种新型定子分区式混合励磁电机的设计与分析(英文)[J]. 中国电机工程学报, 2017, 37(22): 6543-6556, 6766.
Wu Zhongze, Zhu Ziqiang. Design and analysis of a novel partitioned stator hybrid excitation machine[J]. Proceedings of the CSEE, 2017, 37(22): 6543-6556, 6766.
[10] Du Yi, Zhang Chao, Zhu Xiaoyong, et al. Principle and analysis of doubly salient PM motor with Π-shaped stator iron core segments[J]. IEEE Transactions on Industrial Electronics, 2019, 66(3): 1962-1972.
[11] 陈云云, 朱孝勇, 全力, 等. 基于参数敏感度的双凸极永磁型双定子电机的优化设计和性能分析[J]. 电工技术学报, 2017, 32(8): 160-168.
Chen Yunyun, Zhu Xiaoyong, Quan Li, et al. Parameter sensitivity optimization design and perfor- mance analysis of double-salient permanent-magnet double-stator machine[J]. Transactions of China Electrotechnical Society, 2017, 32(8): 160-168.
[12] Hua Wei, Su Peng, Tong Minghao, et al. Investi- gation of a five- phase e-core hybrid-excitation flux- switching machine for EV and HEV applications[J]. IEEE Transactions on Industry Applications, 2017, 53(1): 124-133.
[13] Jia Shaofeng, Qu Ronghai, Li Jian. Analysis of the power factor of stator DC-excited vernier reluctance machines[J]. IEEE Transactions on Magnetic, 2015, 51(11): 8207704.
[14] 左曙光, 刘洋, 邓文哲. 轴向磁通轮毂电机电磁力波灵敏度分析和优化[J]. 电工技术学报, 2018, 33(11): 2423-2430.
Zuo Shuguang, Liu Yang, Deng Wenzhe. Sensitivity analysis and optimization of electromagnetic force wave of an axial-flux in-wheel motor[J]. Transactions of China Electrotechnical Society, 2018, 33(11): 2423-2430.
[15] Toba A, Lipo T A. Generic torque-maximizing design methodology of surface permanent-magnet vernier machine[J]. IEEE Transactions on Industry Appli- cations, 2000, 36(6): 1539-1546.
[16] Penzkofer A, Atallah K. Scaling of pseudo direct drives for wind turbine application[J]. IEEE Transa- ctions on Magnetics, 2016, 52(7): 8700205.
[17] Li Jiangui, Chau K T, Li Wenlong. Harmonic analysis and comparison of permanent magnet vernier and magnetic-geared machines[J]. IEEE Transactions on Magnetics, 2011, 47(10): 3649-3652.
[18] Bai Jingang, Liu Jiaqi, Zheng Ping, et al. Design and analysis of a magnetic-field modulated brushless double-rotor machine-part I: pole pair combination of stator, PM rotor and magnetic blocks[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 2540-2549.
[19] Cheng Ming, Han Peng, Hua Wei. General airgap field modulation theory for electrical machines[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6063-6074.
[20] Zou Tianjie, Li Dawei, Chen Canruo, et al. A multiple working harmonic PM vernier machine with enhanced flux-modulation effect[J]. IEEE Transa- ctions on Magnetics, 2018, 54(11): 8109605.
[21] Liu Xinbo, Zhong Xu, Du Yi, et al. A new magnetic field modulation type of brushless double-fed machine[J]. IEEE Transactions on Applied Super- conductivity, 2018, 28(3): 5206505.
[22] Li J, Wang K. A parallel hybrid excited machine using consequent pole rotor and AC field winding[J]. IEEE Transactions on Magnetics, 2019, 55(6): 8101605.
Static Performance Analysis of Magnetic Field-Modulated Doubly-Fed Brushless Hybrid Excitation Motor
Abstract Permanent magnet (PM) vernier motors based on the magnetic field modulation principle have the characteristics of low speed and high torque. However, similar with traditional PM motors, the excitation field of this kind of motors is generated only by PMs. The air gap magnetic field is relatively constant and is difficult to adjust, so the operation speed range is limited. According to the concept of “hybrid excitation” and introducing hybrid excitation windings between the small teeth of a split-tooth PM vernier motor, a magnetic field-modulated doubly-fed brushless hybrid excitation motor was proposed in this paper. The basic structure and operating principle of the motor were introduced based on finite element analysis, and thus the inherent mechanism of its low speed, high torque and wide speed regulation range was revealed. The static performance of the proposed motor was tested systematically through the designed drive control system, which verified the correctness of theoretical analysis and simulation calculation.
keywords:Magnetic field modulation, hybrid excitation, doubly-fed, in-wheel motor
DOI: 10.19595/j.cnki.1000-6753.tces.190795
中图分类号:TM351
卢 浩 男,1994年生,硕士研究生,研究方向为永磁电机设计与驱动。E-mail: lh15751005797@163.com
杜 怿 男,1979年生,教授,博士生导师,研究方向为永磁电机系统设计与分析。E-mail: duyie@ujs.edu.cn(通信作者)
收稿日期2019-06-29
改稿日期2019-08-18
国家自然科学基金项目(51677081,51777089)、江苏高校“青蓝工程”和江苏省高校优势学科项目资助。
(编辑 赵 鹏)