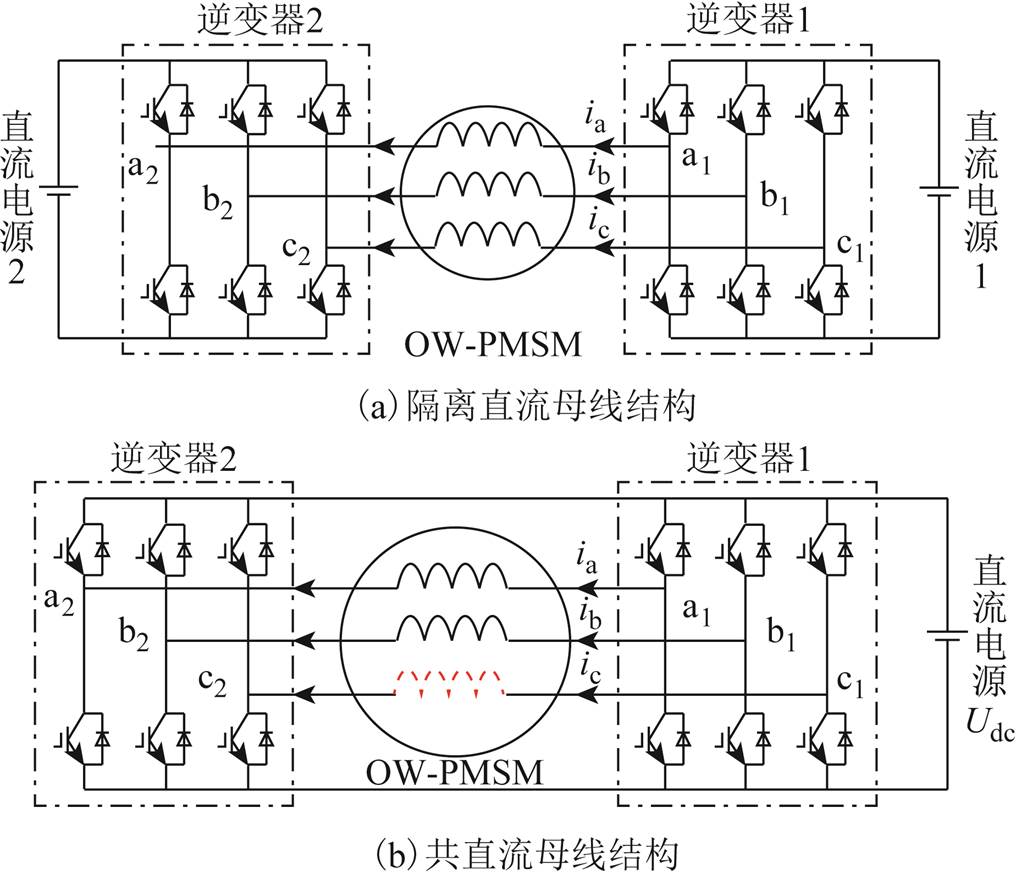
图1 开绕组电机系统两种拓扑结构
Fig.1 Two types of topology of OW-PMSM system
摘要 研究电机相绕组断路下的容错控制对于提升系统的可靠性至关重要,但传统的共直流母线开绕组永磁同步电机(OW-PMSM)系统中的零序电流(ZSC)抑制策略在绕组断路故障下均不再适用。基于此,该文提出一种共直流母线OW-PMSM系统在绕组断相故障下的控制策略。通过建立同步坐标系下电流分量与静止坐标系下电流分量及零序电流之间的数学模型,分析同步坐标系下电流分量中的二倍频及四倍频分量与ZSC的关系,提出在同步坐标系下采用比例积分谐振控制器抑制ZSC的方法。此外,根据绕组断相故障下OW-PMSM系统电压矢量的分布规律,提出一种利用一组互相垂直的电压矢量进行统一调制来产生参考电压矢量的方案。因此,构建OW-PMSM实验平台,对提出的断相故障下共直流母线OW-PMSM控制策略进行实验验证。
关键词:开绕组永磁同步电机 绕组断路故障 零序电流 比例积分谐振控制器
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其结构简单可靠、功率密度大、控制精度高等优势,在工业、交通及军事等领域得到广泛应用[1-2]。在传统PMSM系统中,电机是通过单一逆变器进行供电,但受限于开关器件的耐压等级,PMSM在大功率场合下的应用受到了限制。为此相关学者提出了将开绕组结构应用于PMSM的思路,即通过将传统PMSM的定子绕组中性点打开并额外接入一个逆变器,使得电机通过两个逆变器同时进行供电[3],称为开绕组永磁同步电机(Open-Winding PMSM, OW-PMSM)。因此,在相同功率等级的开关器件下,OW-PMSM额定功率可以增加一倍[4]。此外,两个逆变器供电使得OW-PMSM系统呈现出多电平调制特性[5],且具备了较强的容错运行能力[6-7]。
根据OW-PMSM系统中电机两侧的逆变器是否采用同一个电压源进行供电,可以将其分为隔离直流母线系统[8]与共直流母线系统[9],两种结构分别如图1a和图1 b所示。与图1a所示隔离母线系统相比,图1b中的共直流母线系统仅需一个电压源,可以有效降低系统的成本和体积,是当前的研究热点。但是这种系统中存在零序电流(Zero-Sequence Current, ZSC),会造成转矩脉动和额外损耗[10],影响OW-PMSM系统运行性能。因此,抑制ZSC已经成为共直流母线OW-PMSM系统中的一个热点研究问题。例如,文献[11]提出了一种通过灵活调整零电压矢量作用时间的方法产生零轴参考电压矢量,实现对ZSC的抑制。文献[12]考虑死区时间设置对ZSC造成的影响,提出了基于分配因子调节的ZSC抑制策略。文献[13]提出了一种利用有效参考电压矢量调节零序参考电压的控制策略,实现了低开关次数抑制ZSC的目标。
传统PMSM结构在出现断相故障时,必须对其结构进行改进才可以实现容错运行。例如,为了实现PMSM断相下的运行,文献[14]提出了将PMSM绕组中性点连接至直流母线中点的方法。相比之下,在OW-PMSM系统中,由于每相绕组独立供电,因此系统具有较强的断相容错能力,可仅依靠剩余的正常状态的相绕组而不改变系统结构即可实现容错运行[15]。但此时OW-PMSM系统中依然存在ZSC,而由于剩余两相绕组中电流相位的不确定性关系,无法准确获取ZSC分量,无法对ZSC进行闭环控制,因此现有的ZSC抑制策略[11-13]均无法再应用。基于此,本文提出了断相故障下共直流母线OW-PMSM系统的控制策略。
图1 开绕组电机系统两种拓扑结构
Fig.1 Two types of topology of OW-PMSM system
在OW-PMSM系统正常状态下,ZSC可以通过对三相定子绕组电流求和取平均的方式得到。但这种ZSC的获取方法在相绕组断相故障下不再适用。考虑到断相故障下剩余两相电流的相位关系,本文通过建立静止坐标系下电流分量、同步轴系下电流分量及ZSC之间的数学模型,深入分析同步轴系下二倍频及四倍频电流分量与ZSC的关联。进而设计了基于比例积分谐振(Proportional Integral Resonance, PIR)控制的OW-PMSM系统在断相故障下的ZSC抑制方案。此外,根据断相故障下OW-PMSM系统电压矢量分布的特点,提出了一种通过两个互相垂直的非零电压矢量来调制参考电压矢量的方法。最后在实验平台上对本文提出的共直流母线OW-PMSM系统在断相故障下的ZSC抑制策略进行了验证。
以图1b所示的c相绕组断路为例,分析共直流母线OW-PMSM系统在断相故障下的数学模型。c相绕组断路时OW-PMSM数学模型可表示为
 (1)
(1)式中,ux、ix、ψx (x=a, b)分别代表x相的相电压、相电流、磁链;R为定子绕组电阻;Udc为直流母线电压;Sx1、Sx2(x=a, b, c)表示逆变器1和逆变器2的开关函数,满足对应关系为
 (2)
(2)
在c相绕组断路的情况下,c相绕组对应的桥臂输出电压与Sc1和Sc2无关,均为悬空状态。因此逆变器1和逆变器2的输出电压矢量个数从8个减少到4个,其对应的矢量分布如图2a所示。
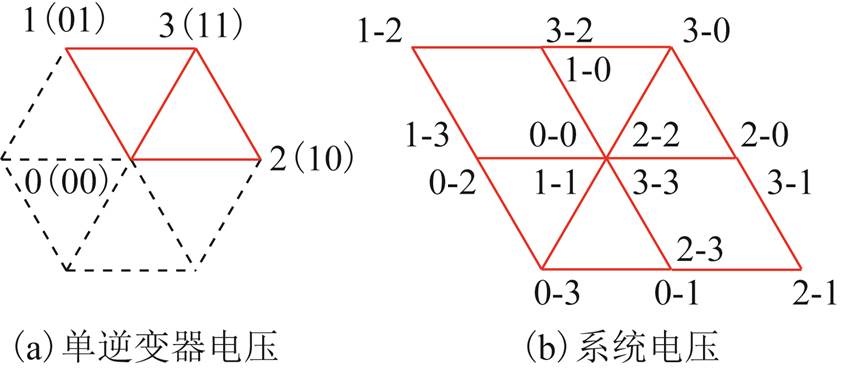
图2 c相绕组断路下的电压矢量分布
Fig.2 Distribution of the voltage vectors under the open-phase fault of c-phase
根据图2a,结合OW-PMSM数学模型(1)可知,此时OW-PMSM系统的电压矢量分布如图2b所示,其中每个电压矢量均以m-n的形式表示,m和n分别为逆变器1和逆变器2的输出电压矢量。从图2b中可以看出,在断相故障后开绕组系统依然能够提供完整的线性调制区间,但最大线性调制度减为原来的一半,从2 Udc/3变为Udc/3。以下的分析均在该有效电压调制区间内进行,不涉及电压过调制问题。
Udc/3变为Udc/3。以下的分析均在该有效电压调制区间内进行,不涉及电压过调制问题。
断相前OW-PMSM的q轴电流iq1可表示为
 (3)
(3)式中,θ为转子位置电角度;ia1、ib1、ic1为断相前的电机相电流,可表示为
 (4)
(4)
式中,I1为电流的幅值;ω为电机旋转电角速度。
断相后c相的电流变为零,原有的三相电流平衡状态被打破,剩余a相和b相的电流分布会受到ZSC的影响。ZSC的存在不仅会引起转矩脉动,还会造成额外的损耗,影响系统性能。因此,本文的目标就是通过抑制ZSC来削弱其对系统的影响。下面对此进行分析。
在仅考虑相电流基波而不考虑ZSC影响的理想情况下,断相后OW-PMSM的q轴电流iq2可表示为
 (5)
(5)式中,ia2和ib2为断相故障后的基波相电流,假设其表达式为
 (6)
(6)
式中,θ1为a相的相位;θ2为b相和a相电流之间的相位差。
在相同负载及转速的情况下,假设断相前后电机的转矩不变,dq轴系下的电流分量也会维持不变。因此可令式(3)的iq1等于式(5)的iq2,得到
 (7)
(7)
从式(3)~式(7)中可以看出,在仅考虑基波的条件下,断相后的相电流幅值增大为断相前的倍,且断相后b相电流滞后a相电流的相位从2π/3变成了π/3。由于ZSC为交流波动分量,当考虑其影响时,断相后的q轴电流不可能为直流量,因此剩余两相电流间的相位并不会严格保持为π/3,这是造成ZSC难以准确观测的根本原因。
断相故障下OW-PMSM系统中的零序回路与正常运行时共直流母线系统相同,其等效回路如图3所示。
图3中,R0和L0分别为零轴回路的等效电阻与电感,U0和UINV分别为永磁体三次磁链ψ3f对应的反电动势和逆变器产生的零序电压,可表示为
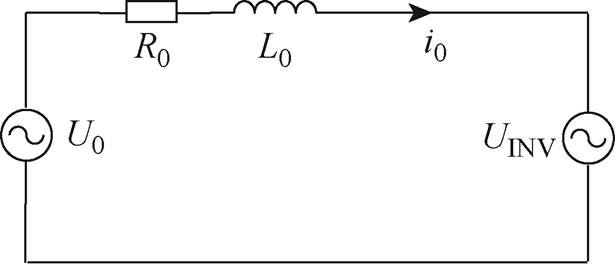
图3 共直流母线下的等效共模回路
Fig.3 Zero-sequence equivalent circuit with common DC bus
 (8)
(8)因此,在式(6)的基础上考虑相电流中的ZSC分量时,断相故障后OW-PMSM的a相和b相电流 和
和 可表示为
可表示为
 (9)
(9)
式中,i0为断相故障下OW-PMSM的ZSC。
断相故障下的OW-PMSM系统电流合成矢量 可表示为
可表示为
 (10)
(10)由式(9)和式(10)可得
 (11)
(11)
从式(11)中可以看出,相绕组断路故障下OW-PMSM系统的ZSC可以等效视为c相电流,如图4所示。从图4中可以看出,断相后的ZSC取代了c相电流的位置。因此,同步轴系下的电流分量会同时受到相电流与ZSC的影响,无法实现两者的解耦控制。
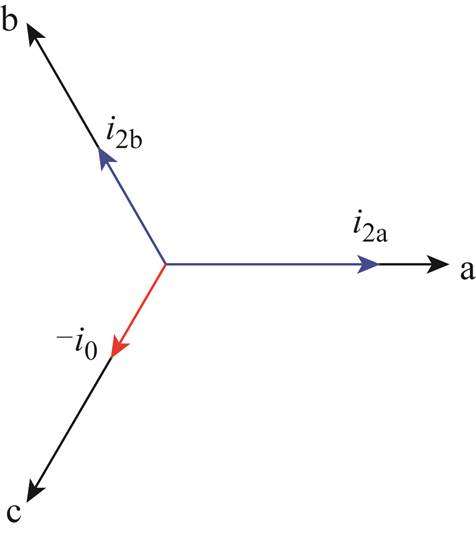
图4 c相绕组断路后的OW-PMSM电流分布
Fig.4 OW-PMSM current distribution under the open-phase fault of c-phase
由式(9)~式(11)可知,ZSC会直接叠加在理想情况下的OW-PMSM系统相电流中,造成相电流的畸变。从图4中可以看出,即使将静止坐标系下的电流分量转换至同步轴系中,依然无法实现相电流与ZSC的解耦,且ZSC会影响到a相和b相的电流相位差。因此,在这种情况下,难以通过设计观测器来准确获取ZSC的信息,也就无法通过增加ZSC的闭环控制来实现ZSC的抑制。
基于此,本文在分析ZSC对同步轴系下电流分量的影响后,提出了基于PIR控制器的ZSC控制策略。
以同步轴系下d轴电流分量为例,在c相绕组断相故障时d轴电流 可表示为
可表示为
 (12)
(12)由图3及式(8)可知,ZSC主要包含由三次谐波磁链部分产生的三倍频分量。因此可以假设ZSC表示为
 (13)
(13)
式中,I0和θ0分别为ZSC的幅值和相位。
因此,可将相电流 和表示为
和表示为
 (14)
(14)将式(14)代入式(12),可得
 (15)
(15)
式中, 、
、 及
及 分别为对应的基波分量、2次谐波分量以及4次谐波分量,即
分别为对应的基波分量、2次谐波分量以及4次谐波分量,即
 (16)
(16)从式(16)中可以看出,受ZSC的影响,中出现了二倍频及四倍频的脉动分量。因此,若将控制成直流量,则对应的id_2和id_4得到抑制,此时可等效认为I0被控制为零,从而达到抑制ZSC的目的。
根据以上分析,本文提出了绕组断相下OW-PMSM系统控制框图,如图5所示。
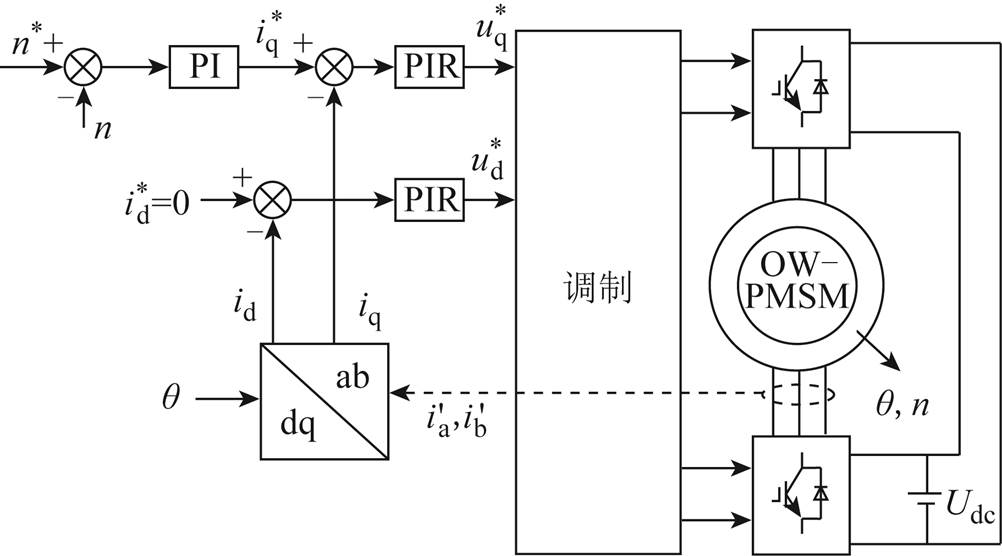
图5 绕组断相下OW-PMSM系统控制框图
Fig.5 Proposed control diagram of OW-PMSM system under the open fault of c-phase
在图5所示的控制框图中,d轴和q轴的电流参考指令 和
和 在稳态下均为直流量。因此若能控制交流分量和
在稳态下均为直流量。因此若能控制交流分量和 严格跟随各自指令,就实现了和中2次谐波与4次谐波的抑制,即可等效实现ZSC的抑制。
严格跟随各自指令,就实现了和中2次谐波与4次谐波的抑制,即可等效实现ZSC的抑制。
为实现对d轴电流和q轴电流谐波分量的抑制,本文中采用的PIR控制器可表示为
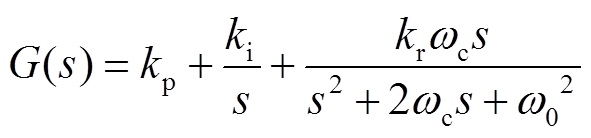 (17)
(17)式中,kp为比例系数;ki为积分系数;kr为谐振系数;ωc为截止角频率; 为谐振角频率。
为谐振角频率。
由于控制的目标是2次谐波和4次谐波分量,为了简化控制器,结合截止角频率ωc的设置,可将谐振频率ω0设置为三倍频。实际中,根据电机的真实转速实时调整设定的谐振角频率。图6给出了在电机转速为500r/min时的PIR控制器伯德图。该转速下的基波频率为25Hz,因此将谐振角频率设置为75π rad/s。

图6 基频为25Hz下PIR控制器伯德图
Fig.6 Bode plot of PIR controller under the fundamental frequency of 25 Hz
从图6中可以看出,在二倍频50 Hz处的幅值为42.8 dB,在四倍频100 Hz处的幅值为43.8 dB。因此这里虽然将谐振频率设置为75 Hz,但是可以通过设置合适的截止频率,使得二倍频及四倍频处均具有较大的幅频特性,从而实现对d、q轴电流波动分量的控制。
以上分析虽然是以c相绕组出现断路故障展开分析,但以上ZSC抑制方案对于任何一相绕组断路的故障均适用。
在OW-PMSM相绕组出现断路故障时,系统的基本电压也随之发生了变化,如图3所示。结合此时的电压矢量分布特点,本文提出一种实施简单、便于实现的统一调制方法。该方法通过选定两个正交电压矢量作为基本电压矢量,调制合成控制系统中的参考电压矢量。基于统一调制法的正交基及电压矢量合成如图7所示。
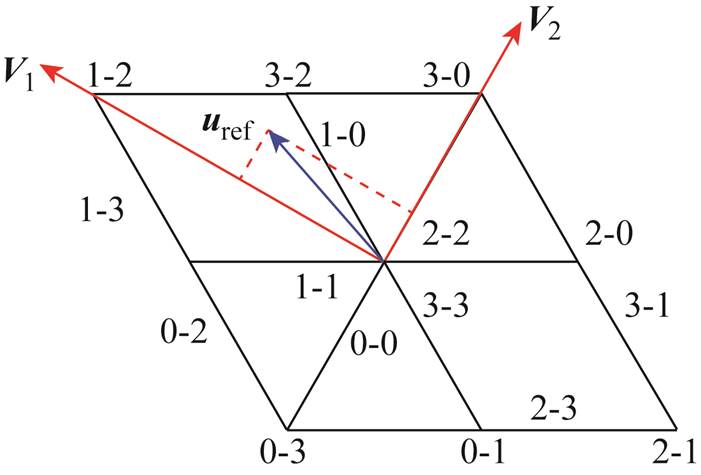
图7 基于统一调制法的正交基及电压矢量合成
Fig.7 Selected orthogonal voltage vectors and the process of synthetizing with the unified modulation scheme
在图2所示的断相故障下系统电压矢量分布图中,两个相互正交的电压矢量分布有四种情况,即1-2与3-0、1-2与0-3、2-1与3-0以及2-1与0-3。本文选择其中由电压矢量1-2表示的V1和3-0表示的V2来组成的正交基。V1和V2可表示为
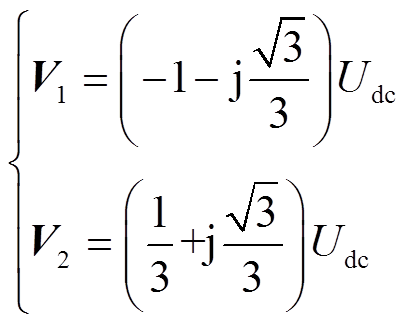 (18)
(18)为便于参考电压调制合成,定义V1和V2这两个正交矢量的单位方向向量n1和n2,可表示为
 (19)
(19)
对于任意的参考电压矢量uref,均可以统一地投影到正交基V1和V2上,如图7中所示。投影分量的计算式为
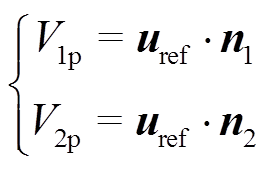 (20)
(20)
因此,V1和V2的作用时间t1和t2可表示为
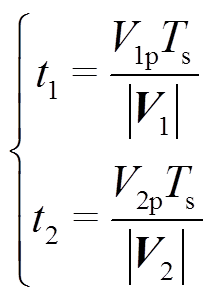 (21)
(21)
式中,Ts为控制周期。
需要注意的是,由于n1和n2的方向被选定了,由式(20)计算出的电压投影分量V1p和V2p会出现负数的情况。这种情况下利用式(21)得出的作用时间t1和t2也会是负数。因此,还需要结合式(22)中作用时间的极性进行判别。
以V1为例进行说明。V1表示的开关状态是1-2,即Sa1=0,Sb1=1,Sa2=1,Sb2=0。当t1为正数时,a1、b1、a2和b2的上桥臂导通时间可表示为0、t1、t1和0。当t1为负数时,等效于施加作用时间为t1的电压矢量-V1,即2-1,因此对应的各上桥臂开关状态为Sa1=1,Sb1=0,Sa2=0,Sb2=1,相应的导通时间可表示为t1、0、0和t1。
由上述分析,可以总结出a1、b1、a2和b2这四个桥臂上管的导通时间为
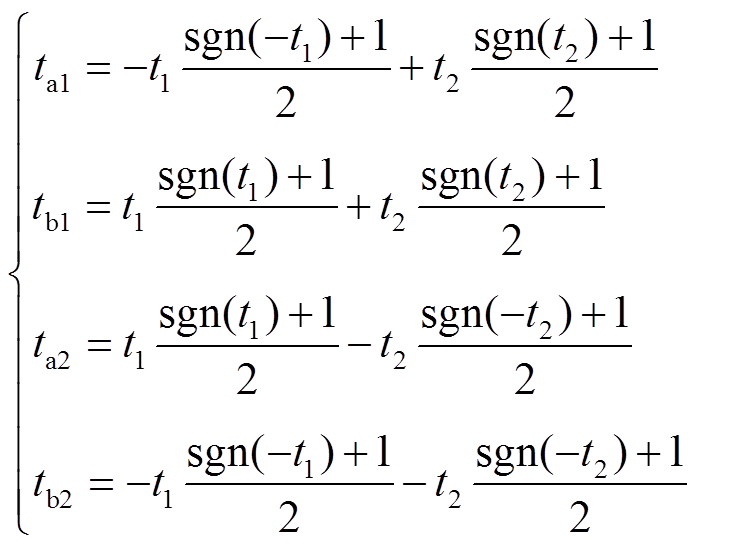 (22)
(22)式中,sgn(x)为极性判断函数,其表达式为
 (23)
(23)
由式(22)和式(23)即可直接得到最终的调制脉冲序列。图8中给出了所有t1和t2极性组合下的调制脉冲序列。
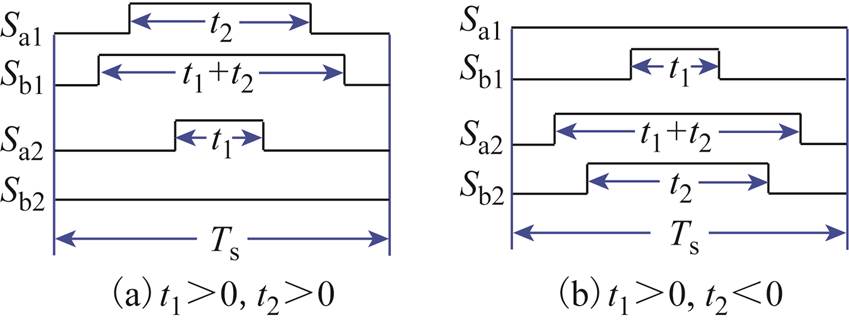
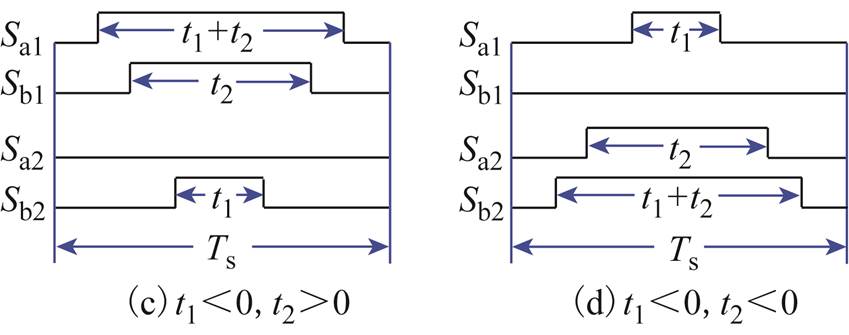
图8 统一调制法下的调制脉冲序列
Fig.8 Modulation sequence of the unified modulation scheme
为了验证本文所提出的断相故障下共直流母线OW-PMSM系统控制策略的有效性,搭建如图9所示的硬件平台对其进行验证。实验中所用到的OW-PMSM参数见表1。实验中以TI公司的TMS320F28355作为控制芯片,开关频率和采样周期的频率设置为10 kHz,母线电压200 V。

图9 实验平台
Fig.9 Experimental platform.
表1 电机参数
Tab.1 Parameters of the motor

参数数值 d轴电感/mH37 q轴电感/mH71 永磁体磁链/Wb0.553 额定频率/Hz50 额定转速/(r/min)1 000 额定负载/(N×m)5 定子电阻/Ω3.9 极对数3
首先在额定负载5 N×m、转速为500 r/min的实验条件下测试了本文提出的控制策略在OW-PMSM从正常状态突变至断相状态下的效果,测试结果如图10所示。
从图10的断相前后波形对比中可以看出,绕组断路后,相电流幅值从2.8A增加至4.8A,放大倍数为1.71,与上文的理论分析保持一致;转矩的波动从±0.12 N×m增加至±0.44N×m。
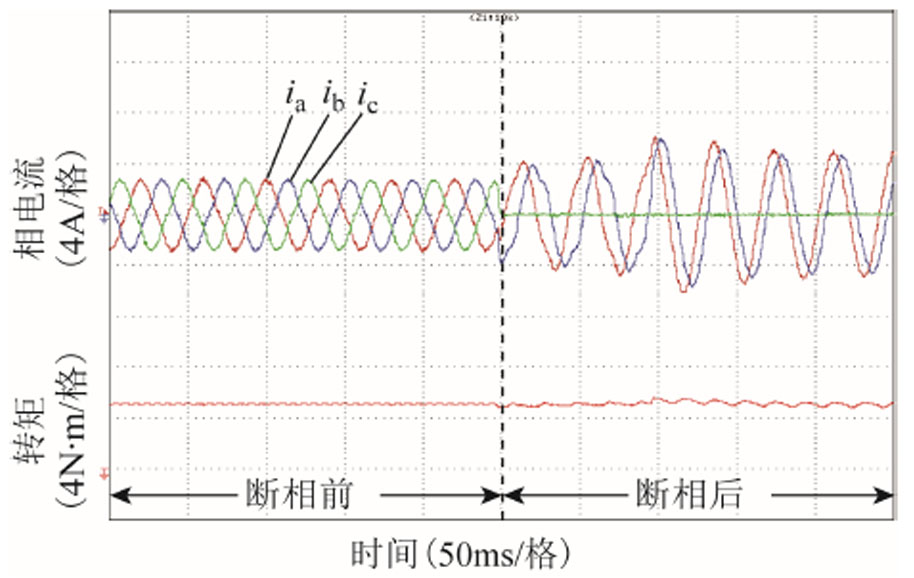
图10 断相前后的突变过程
Fig.10 The dynamic comparison before and after the open-phase fault
随后在相同的测试条件下,测试了本文提出的PIR控制器抑制ZSC的效果,其实验结果如图11中所示。
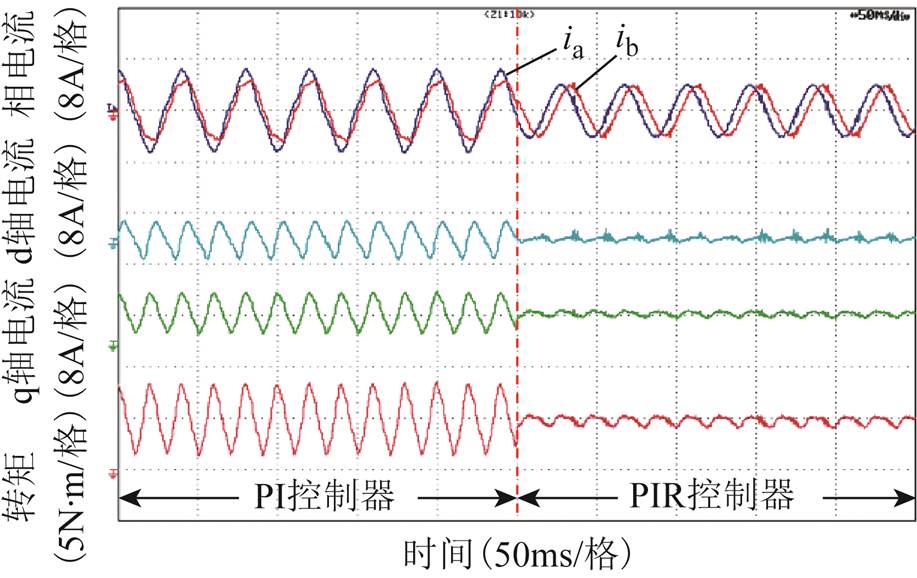
图11 采用PIR控制器前后的实验结果
Fig.11 The experimental comparison before and after the application of the proposed PIR controller
从图11中可以看出,采用本文提出的PIR控制器后,d轴和q轴电流的波动从±3.5A减小到±0.6A,其中d轴电流的2次谐波幅值从0.317A减小至0.041A,4次谐波幅值从0.083A减小至0.018A;q轴电流的2次谐波幅值从0.357A减小至0.052A,4次谐波幅值从0.034A减小至0.017A。从电流谐波成分的变化中可以看出,所提出的控制方案可以有效地对同步轴系下电流中的2次和4次谐波成分进行有效的抑制。因此转矩的脉动也得到了很好的抑制,从±3.2N×m削减到±0.5N×m。对相电流的谐波分析结果表明,相电流中的三倍频谐波成分从9.51%减小至5.49%,这表明系统中的ZSC得到抑制。
为验证所提控制策略在动态过程中的控制效果,实验中负载转矩设定为5N×m,转速参考指令设置为从500r/min阶跃至1 000r/min,此时实验结果如图12所示。

图12 所提控制策略在动态过程中的效果
Fig.12 The dynamic performance of the proposed scheme.
从图12a所示的波形中可以看出,电机的转速在经过了0.6s的短暂调节过程后就完全跟随上了转速参考指令。其加速前和加速后的局部放大图分别如图12b和图12c所示。在图12b中,相电流THD为6.66%,其中三倍频谐波含量为2.65%;在图12c中,相电流THD为5.13%,其中三倍频谐波含量为2.51%。因此,在动态过程中,相电流中的ZSC被抑制。从局部放大图中可以看出,d轴电流和q轴电流的波动始终被限制在±0.6 A以内。
图13给出了本文提出的统一调制法下的调制脉冲序列。从该实验波形中可以看出,在任意控制周期100μs内,始终有一相桥臂的开关信号保持不变。对于出现单位控制周期内有两相桥臂的开关信号保持不变的情况,则是由于调制中设置的死区时间(4 ms)造成的。因此实验结果与理论分析一致。

图13 统一调制法下的调制脉冲序列
Fig.13 The modulation sequence of the unified modulation scheme
本文提出了一种基于统一调制法的相绕组断相故障下共直流母线OW-PMSM系统ZSC抑制控制策略,可得到以下结论:
1)断相故障下由于原有的三相电流平衡关系被打破,导致同步轴系下OW-PMSM电流分量中含有较大的二倍频分量及四倍频分量,造成这些谐波分量的主要有a、b相电流的相位差及ZSC。
2)针对同步轴系中电流谐波分量的分析结果,设计了基于PIR控制的ZSC抑制方案,该方案可以对同步轴系下电流中的二倍频及四倍频分量进行有效的控制,进而实现对ZSC的抑制。
3)根据断相故障下OW-PMSM系统电压矢量分布的特点,提出了一种基于正交电压矢量调制合成参考电压的统一调制法,可以根据参考电压的大小和极性判别直接生成调制脉冲序列,从而简化了断相故障下共直流母线OW-PMSM系统调制的复杂性。
参考文献
[1] 刘国海, 宋成炎, 徐亮, 等. 基于SVPWM的五相永磁同步电机两相开路故障容错控制策略[J]. 电工技术学报, 2019, 34(1): 23-32. Liu Guohai, Song Chengyan, Xu Liang, et al. SVPWM-based fault-tolerant control strategy under two-phase open-circuit fault of five-phase permanent-magnet synchronous motor[J]. Transaction of China Electrotechnical Society, 2019, 34(1): 23-32.
[2] 刘计龙, 肖飞, 沈洋, 等.永磁同步电机无位置传感器控制技术研究综述[J].电工技术学报, 2017, 32(16): 77-88. Liu Jilong, Xiao Fei, Shen Yang, et al. Position- sensorless control technology of permanent-magnet synchronous motor-a review[J]. Transaction of China Electrotechnical Society, 2017, 32(16): 77-88.
[3] Sandulescu P, Meinguet F, Kestelyn X, et al. Control strategies for open-end winding drives operating in the flux-weakening region[J]. IEEE Transactions on Power Electronics, 2014, 29(9): 4829-4842.
[4] Levi E, Satiawan I N W, Bodo N, et al. A space-vector modulation scheme for multilevel open-end winding five-phase drives[J]. IEEE Transactions on Energy Conversion, 2012, 27(1):1-10.
[5] Venugopal Reddy B, Somasekhar V T, Kalya Y. Decoupled space-vector PWM strategies for a four-level asymmetrical open-end winding induction motor drive with waveform symmetries[J]. IEEE Transactions on Industrial Electronics, 2011, 58(11): 5130-5141.
[6] 年珩, 周义杰, 曾恒力. 开绕组永磁同步发电机的容错控制[J]. 电工技术学报, 2015, 30(10): 58-67. Nian Heng, Zhou Yijie, Zeng Hengli. Fault-tolerant control technique of permanent magnet synchronous generator based on open winding configuration[J]. Transaction of China Electrotechnical Society, 2015, 30(10): 58-67.
[7] 邓先明, 刘娜, 陈剑, 等. 新型开绕组双馈电机调速系统研究[J]. 电机与控制学报, 2018, 22(7): 8-18. Deng Xianming, Liu Na, Chen Jian, et al. Research on open winding doubly fed motor speed control system[J]. Electric Machines and Control, 2018, 22(7): 8-18.
[8] Venugopal Reddy B, Somasekhar V T, Kalyan Y. Decoupled space-vector PWM strategies for a four-level asymmetrical open-end winding induction motor drive with waveform symmetries[J]. IEEE Transactions on Industrial Electronics, 2011, 58(1): 5130-5141.
[9] 曾恒力, 年珩, 周义杰. 基于比例谐振控制的共直流母线开绕组永磁同步电机零序电流抑制技术[J]. 电工技术学报, 2016, 31(22): 35-44. Zeng Hengli, Nian Heng, Zhou Yijie. Zero sequence current suppression for open winding permanent magnet synchronous motor with common DC bus based on proportional resonant controller[J]. Transactionof China Electrotechnical Society, 2016, 31(22): 35-44.
[10] 金石, 王中正, 张岳, 等.基于直接功率控制的开绕组BDFG系统共模电压抑制[J].电机与控制学报, 2018, 22(2): 24-32. Jin Shi, Wang Zhongzheng, Zhang Yue, et al. Common mode voltage elimination for open winding brushlessdoubly-fed generator based on direct power control[J]. Electric Machines and Control, 2018, 22(2): 24-32.
[11] Zhou Yijie, Nian Heng. Zero-sequence current suppression strategy of open-winding PMSG system with common DC bus based on zero vector redistribution[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3399-3408.
[12] An Quntao, Liu Jin, Peng Zhuang, et al. Dual-space vector control of open-end winding permanent magnet synchronous motor drive fed by dual inverter[J]. IEEE Transactions on Power Electronics, 2016, 31(12): 8329-8342.
[13] Hu Wei, Nian Heng, Sun Dan. Zero-sequence current suppression strategy with reduced switching frequency for open-end winding PMSM drives with common DC bus[J]. IEEE Transactions on Industrial Electronics.2019, 66(10): 7613-7623
[14] Gajanayake C J, Bhangu B, Nadarajan S, et al. Fault tolerant control method to improve the torque and speed response in PMSM drive with winding faults[C]//IEEE Ninth International Conference on Power Electron and Drive Systems, Singapore, 2011: 956-961.
[15] Ruan Chenhui, Hu Wei, Nian Heng, et al. Open-phase fault control in open-winding PMSM system with common DC bus[C]//2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, 2019: 1052-1056.
The Unified Modulation Scheme of Open-End Winding PMSM with Common DC Bus under the Open-Phase Fault Considering the Suppression of Zero-Sequence Current
Abstract The research of the continuous fault-tolerant operation under open-phase fault is vital for the high reliability of the motor-drive system. However, in the open-phase fault of open-end winding permanent-magnet synchronous motor (OW-PMSM) system with common dc bus, the zero-sequence current (ZSC) cannot be suppressed with the conventional schemes. On this basis, a novel control scheme is proposed for the OW-PMSM system with open-phase fault. By investigating the relationship among the currents in synchronous coordinate system, the currents in stationary coordinate system and ZSC, the proportional resonance controller-based control scheme is proposed to suppress the 2nd and 4th harmonic currents in ZSC. Moreover, according to the distribution of voltage vectors under the open-phase fault, a unified modulation scheme, which can be applied to simplify the modulation process by synthesizing the reference voltage with two orthogonal voltage vectors, is proposed. Finally, the experimental platform of the OW-PMSM system is built to validate the effectiveness of the proposed control scheme.
keywords:Open-winding permanent-magnet synchronous motor, open-phase fault, zero-sequence current, the proportional integral resonance controller
中图分类号:TM351
DOI:10.19595/j.cnki.1000-6753.tces.190425
收稿日期2019-04-16
改稿日期2019-08-18
吕康飞 男,1980年生,博士研究生,讲师,研究方向为永磁同步电机及其控制。E-mail:lkf@hytc.edu.cn
董新伟 男,1972年生,副教授,研究方向为电力电子在电力系统中的应用。E-mail:4385045@qq.com(通信作者)
(编辑 郭丽军)