图1 含有RHPZ的开关DC-DC变换器
Fig.1 DC-DC switching converter with RHPZ
摘要 含有右半平面零点(RHPZ)的开关DC-DC变换器发生占空比突变时,暂态过程会出现负调现象,该现象会导致系统暂态性能变差,负调持续时间段系统易形成正反馈而出现不稳定现象,传统的频域法无法直接进行控制器设计,因此对其进行控制较最小相位系统困难的多。该文以含有RHPZ的Buck-Boost变换器为例,建立负调电压暂态数学模型,推导出衡量负调电压性能的表达式,依据该表达式与变换器参数之间的关系,给出抑制负调电压的参数设计方法。根据负调电压抑制后的系统暂态性能特点,并结合含有RHPZ开关DC-DC变换器电路拓扑的特点,提出限制占空比和频域法相结合的控制策略。实验结果表明,该控制策略具有良好的暂态和稳态性能。
关键词:右半平面零点 DC-DC变换器 负调电压 暂态性能 频域法设计
近年来,随着能源危机的日益突出,光伏和燃料电池等新能源技术成为当今的研究热点[1-6]。在这些系统中,需要可以实现升压或降压功能的开关DC-DC变换器,其中,Buck变换器及其衍生拓扑是最小相位系统,而Boost、Buck-Boost、Cuk、Zeta、Sepic及其衍生拓扑都是非最小相位系统[3-8],表现为控制变量到输出电压的暂态数学模型含有右半平面[7-12]零点(Right Half Plane Zero, RHPZ)。RHPZ会导致这类变换器在占空比增大(或减小)时,输出电压出现先减小(增大)而后增大(减小)的暂态过程,称为负调现象[13]。负调现象会导致系统暂态过渡过程时间延长,在负调持续的时间段内,控制器会接收到错误的反馈信号而形成正反馈系统,从而导致系统不稳定[14-15]。正是由于RHPZ的存在,含有RHPZ的开关DC-DC变换器的控制较最小相位系统困难得多,因此,寻求一种简单有效的控制策略成为亟待解决的关键问题。
很多研究人员对含有RHPZ的开关DC-DC变换器的控制进行了深入研究,目前已有的研究成果主要体现在两个方面:①采用传统的PI、PID等控制器进行控制[16];②利用非线性控制策略进行控制,包括滑模变结构控制、无源控制、自适应控制、模糊控制等[16-18]。经典控制理论中的频域法设计仅适用于最小相位系统,具有非最小相位特性的开关DC-DC变换器由于RHPZ的存在,导致传统的频域法不能直接应用,进而无法用幅值裕度和相位裕度对设计的控制器效果进行衡量。传统的PI、PID控制器仅根据控制变量的误差,通过动态调节变换器的占空比,实现对输出电压或其他变量的控制,控制效果较差,无法获得良好的暂态和稳态性能。由于RHPZ的存在,导致常规的非线性控制策略如滑模变结构、无源控制、自适应控制等都无法直接应用,控制器设计变得复杂。分析含有RHPZ的开关DC-DC变换器暂态数学模型可知,RHPZ与变换器设计参数有关,因此本文提出从变换器参数优化设计角度来抑制负调电压,这样就可以在变换器设计阶段有效地完成负调电压抑制,从而提高系统暂态性能。
本文分析了含有RHPZ非隔离式开关DC-DC变换器电路拓扑的共同特征,以含有RHPZ的Buck- Boost变换器为例,建立负调电压暂态数学模型,根据该模型推导出衡量负调电压暂态性能的指标,依据该指标与变换器参数之间的关系,给出了负调电压抑制的参数优化设计方法,根据负调电压抑制的结果提出限制占空比和频域法相结合的控制器设计思路,使得设计的控制器可利用幅值裕度和相位裕度对其控制效果进行衡量,最后对设计的控制器进行了实验验证。本文提出的控制方法对其他含有PHRZ的电力电子变换器的控制器设计具有指导意义。
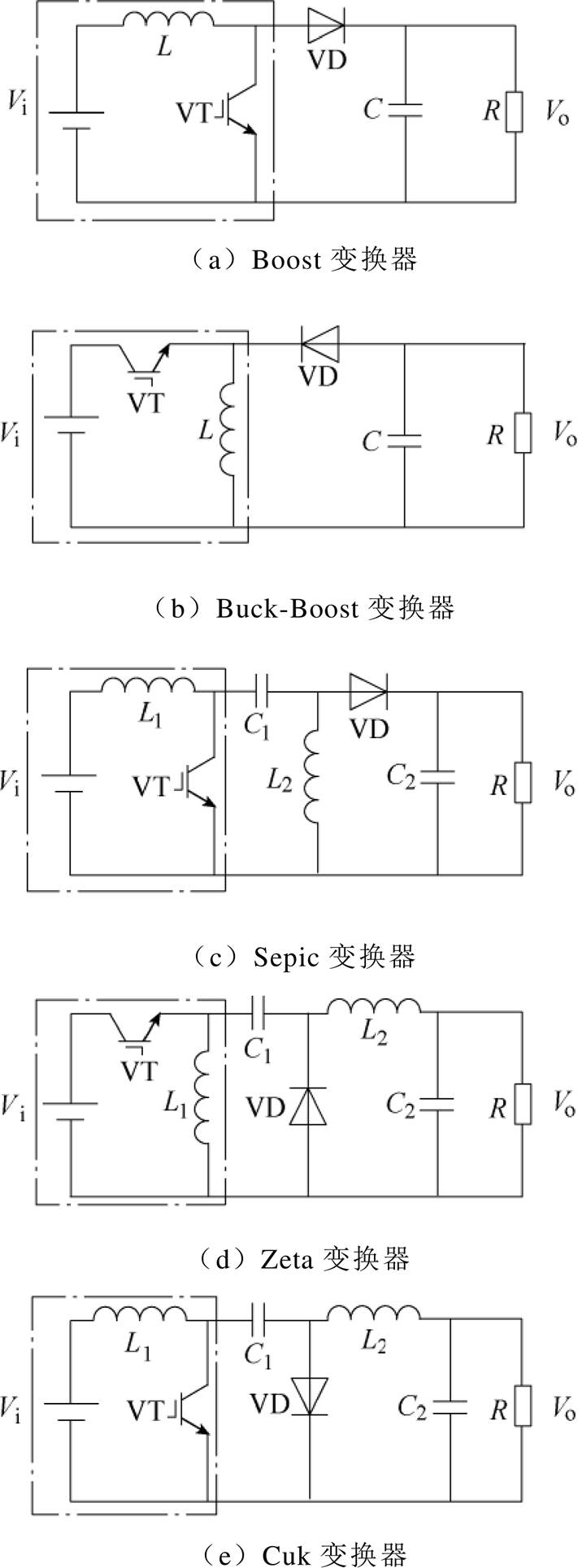
含有RHPZ的非隔离式开关DC-DC变换器常见的电路拓扑有五个,即Boost、Buck-Boost、Sepic、Zeta、Cuk,对应的电路拓扑如图1所示。
以上五个电路拓扑共同特点是都具有升压功能,且控制变量到输出电压的暂态数学模型含有一个或两个RHPZ。分析这五个变换器的电源输入端可看出,电路拓扑具有共同特征,即当开关管VT导通时具有如图2所示电路拓扑结构,即图1中的点画线框部分。
图1 含有RHPZ的开关DC-DC变换器
Fig.1 DC-DC switching converter with RHPZ
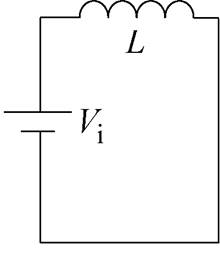
图2 开关管导通等效电路
Fig.2 Switch tube conduction of equivalent circuit
分析图2可知,当含有RHPZ的Boost、Buck- Boost、Sepic、Zeta和Cuk变换器的占空比为1时,输入电源会发生直通现象。为了保证其工作的安全性,必须限制其最大占空比。
为了方便说明含有RHPZ开关DC-DC变换器控制难点,以Buck-Boost变换器为例进行说明。由文献[19]可知,Buck-Boost变换器控制变量到输出电压暂态数学模型为
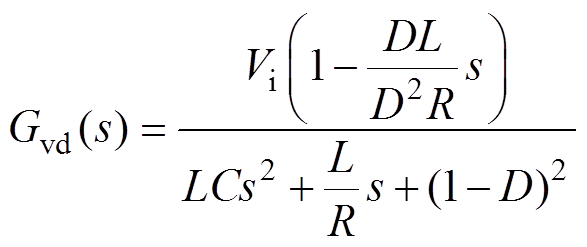 (1)
(1)式中,D为占空比。
由式(1)可知,该系统模型含有一个RHPZ。由于RHPZ的存在,变换器组成的闭环自动控制系统中,当负载或输入电压发生变化时,为了保持输出电压不变,系统会出现占空比突变的暂态过渡过程,对应的输出电压则会出现负调现象。图3给出了含有负调现象的非最小相位Buck-Boost变换器输出电压vo实验结果,对应变换器的参数为:Vi= 10~15V,Vo=24V,R=4W,L=5mH,C=470mF,Dd=0.2。
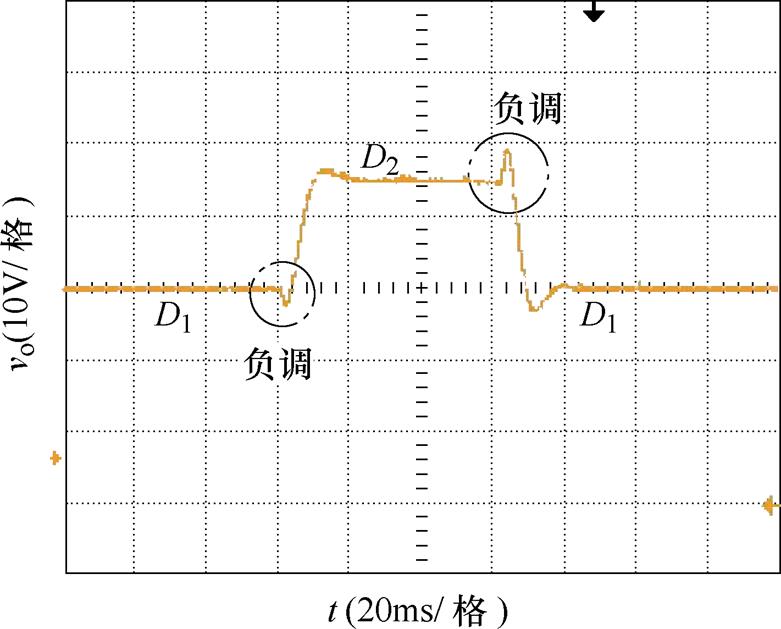
图3 含有RHPZ开关变换器占空比突变暂态过程
Fig.3 Abrupt transient process of duty cycle with RHPZ switching converter
由图3可看出,RHPZ的存在会导致占空比发生突变时出现负调电压现象,负调电压导致系统暂态响应速度变慢,过渡过程时间延长;负调电压持续时间段内控制器会接受到错误的反馈信号,系统形成正反馈而导致系统不稳定;RHPZ的存在导致传统的频域法不能适用,进而不能用幅值裕度和相位裕度对控制器设计效果进行衡量,控制器设计具有盲目性;系统所具有的非最小相位特性限制了许多常规非线性控制如滑模控制、反馈线性化、反向递推法等策略的直接应用。
分析式(1)可看出,Buck-Boost变换器的RHPZ与占空比、电感、负载电阻等参数有关,因此可探索通过对变换器参数进行优化设计,从而在变换器初期设计阶段就可以有效地抑制负调电压,进而提高系统暂态性能。但要实现负调电压抑制,需建立负调电压暂态数学模型,并得到负调电压衡量指标与变换器参数之间的关系,从而方便进行抑制。
下面以Buck-Boost变换器工作在欠阻尼状态为例,对负调电压建模和抑制进行详细说明。
Buck-Boost变换器发生占空比突然增大时出现如图4所示的负调现象。图4中,t0时刻前Buck-Boost变换器输出电压为Vo1,对应的占空比为D1,t0时刻占空比突然增大为D2,变换器输出电压发生了先下降后增大的暂态过渡过程,对应负调电压峰值时间为tp,最终输出电压为Vo2,系统达到了新的平衡状态,tV为负调电压持续时间。
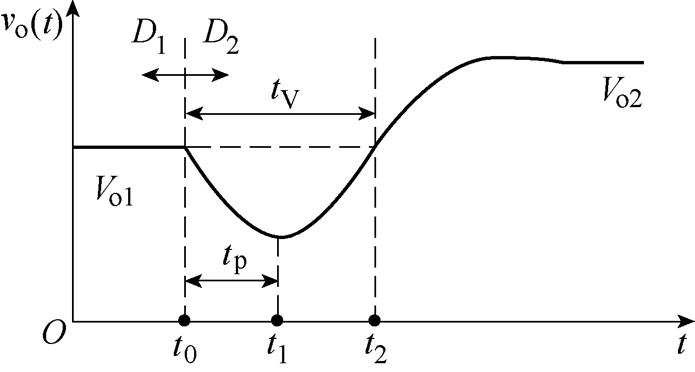
图4 负调电压衡量指标
Fig.4 Measurement index on negative voltage
由式(1)可得Buck-Boost变换器占空比由D1突变为D2时的输出电压增量Dvo(s)[19]为
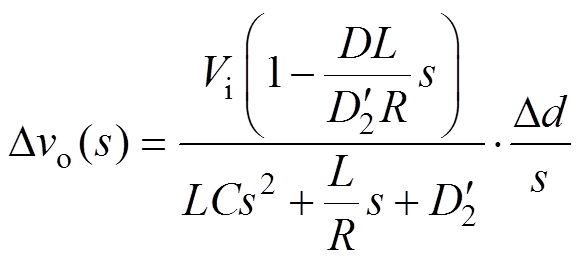 (2)
(2)其中
Dd=D2-D1
将式(2)取拉普拉斯反变换可得Buck-Boost变换器负调电压时域数学模型为

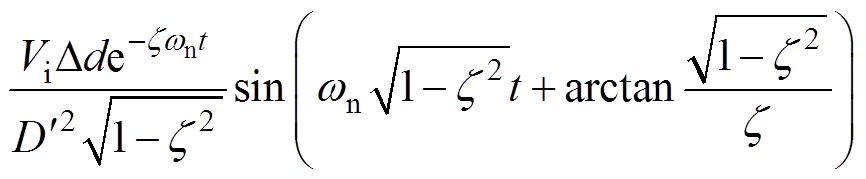 (3)
(3)
其中

将式(3)对时间 求偏导数可得
求偏导数可得


 (4)
(4)令式(4)等于零并根据麦克劳林公式化简可得负调电压峰值时间tp表达式为
 (5)
(5)
式(5)的具体推导过程见附录。
分析式(5)可知,tp与变换器的占空比D、电感L、电容C和负载R等参数有关,因此对变换器参数进行合理优化设计就可以有效抑制tp,从而可以提高系统的暂态性能。下面就Buck-Boost变换器的参数与负调电压暂态性能指标之间的关系进行分析讨论。
一般而言,Buck-Boost变换器工作在一定的输入电压范围[Vi,min, Vi,max]和负载电阻范围[Rmin, Rmax],tp的抑制需在这个动态范围内进行分析讨论。[Vi,min, Vi,max]对应的占空比范围为[Dmin, Dmax]。下面就tp与D、L和C之间关系进行分析。
将式(5)的tp对占空比D求偏导数可得
 (6)
(6)将式(5)的tp对电感L求偏导数可得
 (7)
(7)
将式(5)的tp对电容C求偏导数可得
 (8)
(8)由式(6)~式(8)可知,tp随着占空比D、电感L、电容C的增大而增大。对Buck-Boost变换器而言,Dmax由最小输入电压Vi,min决定;最小负载电阻Rmin决定了变换器输出的最大功率;Dmax和Rmin一般不作为优化参数,而L和C可进行合理的优化设计,从而有效地抑制tp,提高系统暂态响应速度。下面给出tp抑制的L和C的优化设计步骤。
负调电压峰值时间tp抑制需要根据变换器的参数确定占空比范围、最小电感以及最小电容。根据变换器的输入电压范围[Vi,min, Vi,max]及输出电压Vo可得占空比的范围[Dmin, Dmax]为
 (9)
(9)变换器全动态范围内工作在电感电流连续模式(Continuous Conduction Mode, CCM)的最小电感Lmin为
 (10)
(10)
式中, 为开关管工作频率。
为开关管工作频率。
变换器全动态范围内满足输出纹波电压Vpp要求的最小电容Cmin为
 (11)
(11) Buck-Boost变换器负调电压抑制方法如图5所示。
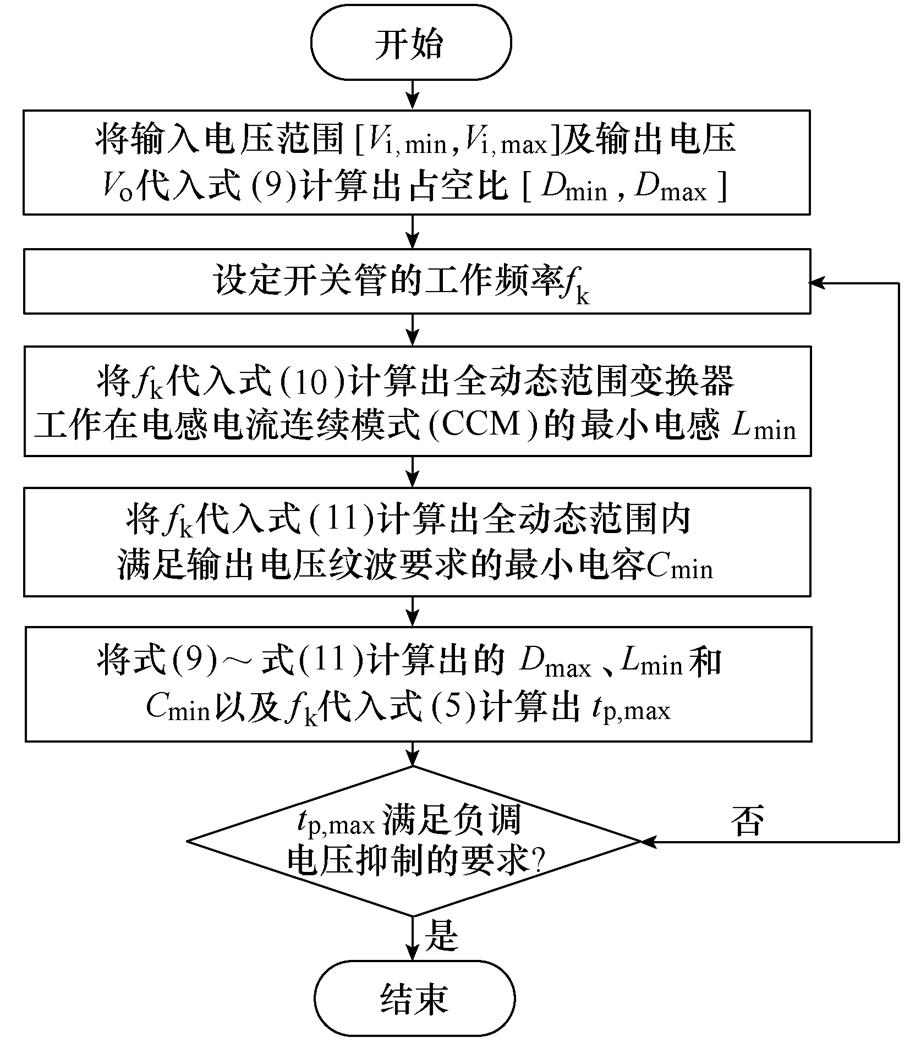
图5 tp的抑制流程
Fig.5 Suppression process on tp
为了验证第3.3节给出的负调电压抑制效果,以一个典型非最小相位Buck-Boost变换器为例进行验证,具体参数见表1。
表1 Buck-Boost变换器电路参数
Tab.1 Circuit parameters of Buck-Boost converter

参 数数 值 输入电压Vi/V12~48 输出电压Vo/V24 负载电阻R/W5~30 占空比变化量Dd0.1 纹波电压Vpp/mV200 负调电压峰值时间tp/ms0.1 开关频率fk/kHz待设计 储能电感L/mH待设计 滤波电容C/mF待设计
为了比较L、C和D对tp的影响情况,图6给出了不同L、C以及D所对应的tp。

图6 tp与L、C和D之间的关系
Fig.6 Relationship between L、C and D with tp
由图6可以看出,L、C和D越大,对应的tp越长,当Lmax=5 000mH、Cmax=1 000mF、Dmax=0.67时,tp达到了极大值,此时tp,max=3.8ms;图6仿真结果和式(7)~式(9)理论分析结果一致。为了提高含有RHPZ开关变换器暂态响应速度,减小负调电压峰值时间tp,应尽量减小电感和电容的取值,但是对Buck-Boost变换器而言,电感需满足工作模式要求,而电容则需满足纹波电压要求。下面按照图5给出的步骤和方法对表1的参数进行优化设计:
(1)计算出Dmin=0.33,Dmax=0.67。
(2)设定开关频率fk=40kHz。
(3)根据式(10)计算出Lmin=200mH(选择1.2倍裕度)。
(4)根据式(11)计算出Cmin=800mF(选择2倍裕度)。
(5)根据式(5)计算出tp,max=0.24ms。
由第(5)步计算的结果可知,tp,max大于表1设定值,不满足要求,提高开关频率fk进行二次设计。选择fk=100kHz,按照上面同样的步骤和方法可计算出Lmin=80mH,Cmin=320mF,tp,max=0.04ms,满足要求。
为了验证负调电压抑制的效果,利用电力电子专用仿真软件PSIM9.0对负调电压抑制前后的效果进行仿真对比,仿真结果如图7所示。其中图7a的变换器参数为:L=5 000mH,C =1 000mF,D=0.67,R=5W,Dd=0.1,fk=10kHz;图7b的变换器参数为:L=80mH,C=320mF,D=0.67,R=5W,Dd=0.1,fk= 100kHz。
当L=5 000mH,C=1 000mF,D=0.67,R=5W 时,由式(5)可计算可得负调电压峰值时间tp= 3.8ms,由图7a可看出,仿真结果tp=3.9ms,理论和仿真结果较接近;当L=80mH,C =320mF,D=0.67,R=5W 时,由式(5)可得负调电压峰值时间tp= 0.04ms,由图7b可看出,负调电压峰值时间tp非常小,可忽略不计。

图7 负调电压抑制前后对比波形
Fig.7 Comparison waveforms before and after negative voltage regulation
对比以上仿真结果可知,Buck-Boost变换器参数未优化前,系统的tp较长,此时负调电压较严重,系统暂态响应速度慢;通过对变换器的参数进行合理优化设计后,tp非常小,有效地提高了系统暂态响应速度,此时式(1)中的RHPZ对系统暂态性能的影响可忽略不计,即式(1)中的RHPZ可忽略 不计。
由第1节分析可知,限制最大占空比后可避免开关管VT发生直通短路现象;由式(6)和图6可知,D越大,tp越长,系统暂态性能越差,因此限制占空比可以抑制负调电压,从而提高系统暂态响应速度。
为了保证含有RHPZ的开关DC-DC变换器安全可靠工作,必须对占空比进行限制,但限制占空比后,也就限制了变换器的升压能力。因此,占空比最大限幅值要兼顾系统暂态性能、稳态性能以及变换器的升压能力。
由第3节分析可看出,含有RHPZ的Buck-Boost变换器通过参数优化设计后,其暂态模型中的RHPZ所产生的负调电压可以忽略不计,此时式(1)中的RHPZ可忽略不计,即式(1)可近似为
 (12)
(12) 由式(12)可知,该系统近似为最小相位系统,此时可采用频域法进行控制器设计。下面给出频域法设计过程。系统采用图8所示的闭环结构。
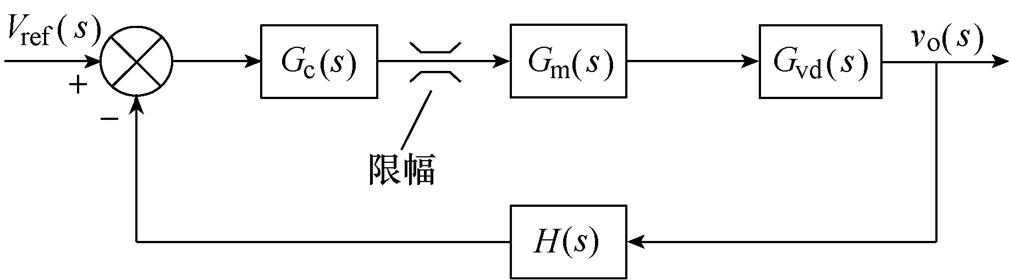
图8 系统闭环结构
Fig.8 Closed loop structure of the system
图8中,Vref (s)为系统参考输入;Gc(s)为待设计的补偿网络传递函数;Gm(s)为PWM传递函数;H(s)为反馈分压网络传递函数;Gvd(s)为变换器控制变量到输出电压传递函数。其中,PWM的传递函数[20]为
 (13)
(13)式中,Vm为PWM中锯齿波的幅值。
反馈分压网络传递函数为
 (14)
(14)由图8可得系统原始回路增益传递函数为
 (15)
(15)
将式(12)~式(14)代入式(15)可得
 (16)
(16)原始回路Go(s)为一个二阶系统,系统含有两个极点。式(16)中的输入电压Vi和负载电阻R分别按照负调电压最严重的情况进行设计,即Vi=Vi,min (D=Dmax),R=Rmin,电感L和电容C按照优化后的参数进行设计。将表1的数据及优化后的电感L和电容C代入式(16)可得Go(s)为
 (17)
(17)
式中,Vi=12V;R=5W;H(s)=0.1;Vm=2.4V;L=80mH;C=320mF。
由式(17)可知,原始回路增益函数Go(s)的幅频特性和相频特性如图9所示。
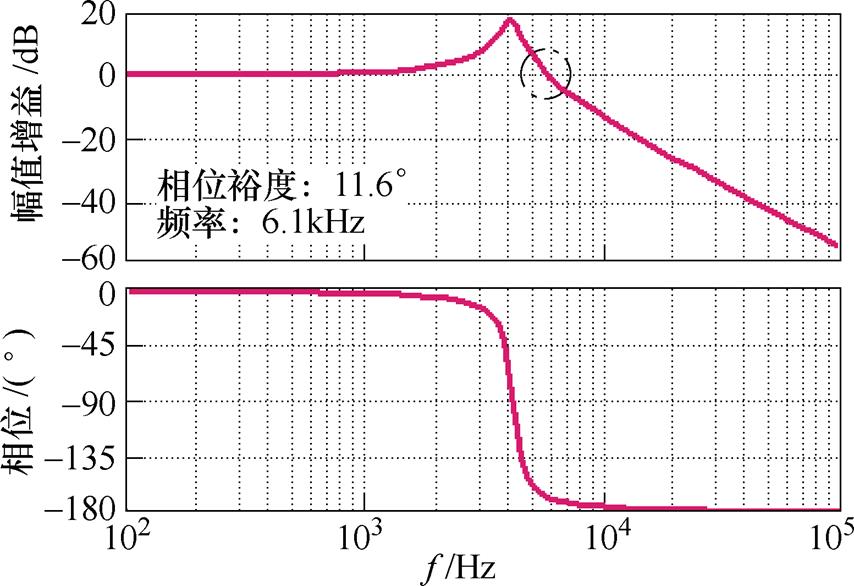
图9 开环幅相频特性曲线
Fig.9 Bode diagrams of the open loop
由图9可知,伯德图低频时Go(s)幅值为1.17dB的水平线,在频率4.3kHz时发生转折,其斜率变为-40dB/dec。Go(s)的增益交越频率fg≈6.1kHz,系统相位裕度PM≈11.6°。
由式(12)可得系统阻尼比z 为
 (18)
(18)将表1的参数及优化后的L和C的代入式(18)可得系统最大阻尼比zmax=0.15,因此系统全动态范围工作在欠阻尼状态。根据系统阻尼比的特点,选择补偿网络为
 (19)
(19)
为了有效抑制变换器输出电压纹波,加入补偿后系统的传递函数Gc(s)Go(s)的增益交越频率fg选择为1/5的开关频率fs[20]。因此,补偿后系统的增益交越频率fg为
 (20)
(20)补偿网络Gc(s)的两个相同零点频率fz设计为Go(s)两个相近的极点的频率的1/2,即满足
 (21)
(21)
式中, ;
; 。
。
为了更好地减小输出高频开关纹波,补偿网络Gc(s)的两个相同极点频率fp[20]设计为
fp=fs (22)
式中, 。
。
加入补偿网络后,系统Gc(s)Go(s)在fg处的增益为0dB,此时需满足
 (23)
(23)根据以上给出的补偿网络设计原则,可得补偿校正网络传递函数为
 (24)
(24)
根据以上给出的步骤和参数可画出加入补偿网络后系统Gc(s)Go(s)的幅频特性和相频特性如图10所示。
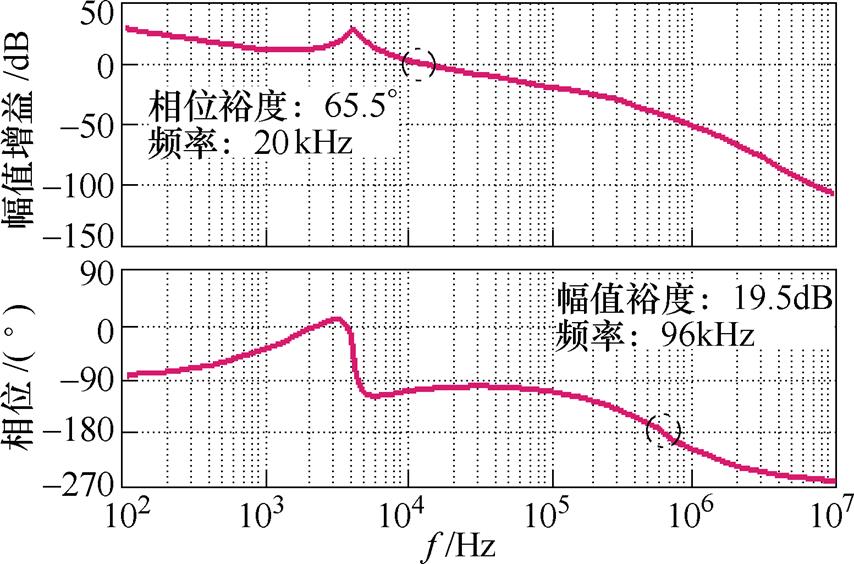
图10 加入补偿网络后开环幅相频特性曲线
Fig.10 Bode diagrams of the open loop with compensation
由图10可以可看出,补偿后的系统幅频特性在20kHz处以-20dB/dec斜率通过0dB,此时系统的相位裕度为65.5°;补偿后系统相频特性在96kHz处对应-180°,对应系统幅值裕度为19.5dB。补偿后的幅相频特性满足了频域法对系统的幅值和相位裕度的要求。为了验证设计的补偿网络的有效性和可行性,下面进行实验验证。
为了验证本文提出的控制策略的合理性及有效性,搭建了一个120W的Buck-Boost变换器实验平台,变换器实验参数见表2。
为了分析基于频域法控制的收敛性与鲁棒性,在设计的Buck-Boost变换器实验平台上,同时验证了PI控制的效果,并将二者的实验结果进行了对比分析。其中频域法设计的补偿网络参数选择式(24)计算的参数;PI控制器选择的比例系数Kp=2,积分系数Ki=1 000;占空比最大限幅值Dmax=0.85。实验分别进行了负载扰动测试和输入电压扰动测试,具体实验结果如下。
表2 Buck-Boost变换器实验参数
Tab.2 Experimental parameters of Buck-Boost converter
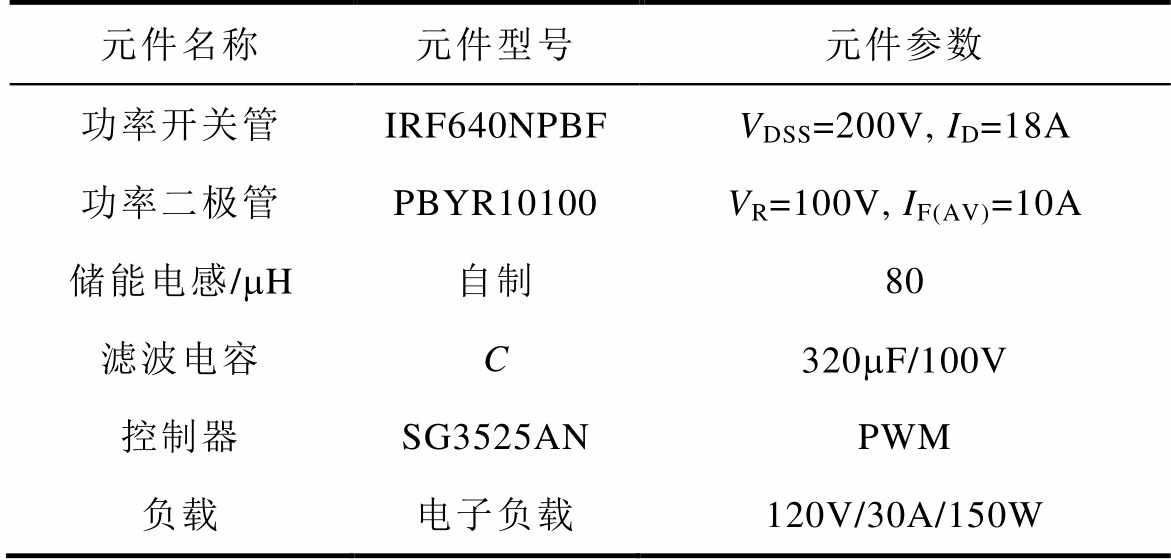
元件名称元件型号元件参数 功率开关管IRF640NPBFVDSS=200V, ID=18A 功率二极管PBYR10100VR=100V, IF(AV)=10A 储能电感/mH自制80 滤波电容C320mF/100V 控制器SG3525ANPWM 负载电子负载120V/30A/150W
Buck-Boost变换器输出电压给定值为24V,在稳定工作状态时,负载电流瞬间由0A突变为4.8A,即瞬间增大负载电流。负载电流变化时,变换器输出电压波形频域法控制效果如图11a所示,PI控制效果如图11b所示。同时测试了负载电流由2.4A突变为4.8A时的实验结果,频域法的实验结果如图11c所示,PI控制效果如图11d所示。
分析图11a和图11b可知,负载电流从0A瞬间突然增大到4.8A,频域法控制历时6.5ms输出电压趋于稳定,而PI控制历时17ms;在负载电流突变时,变换器的输出电压发生畸变,频域法控制时的峰峰值为3.1 V,畸变值为12.9%;PI控制峰峰值为23.7V,畸变值达98.8%。分析图11c和11d可知,负载电流从2.4A瞬间突然增大到4.8A,频域法控制历时5ms输出电压趋于稳定,而PI控制历时12ms;在负载电流突变时,变换器的输出电压发生畸变,频域法控制时的峰峰值为1.1V,畸变值为4.6%;PI控制峰峰值为10.7V,畸变值达44.6%。

图11 抗负载扰动波形
Fig.11 Waveforms of anti-load disturbance
Buck-Boost变换器输出电压给定值为24V,在稳定工作状态时,输入电压由48V突变为12V,即瞬间减小输入电压。输入电压突变时,变换器电压输出波形频域法控制效果如图12a所示,PI控制效果如图12b所示。
分析图12a和12b可知,输入电压从48V瞬间突然减小到12V,频域法控制历时2ms输出电压趋于稳定,而PI控制历时19ms;在输入电压突变时,变化器的输出电压发生畸变,频域法控制时的峰峰值为0.2V,畸变值为0.8%;PI控制峰峰值为5.4V,畸变值达22.5%。
本文将频域法设计的控制器与PI控制器对比实验数据总结见表3,由于篇幅有限,其余扰动 0A→2.4A和24V→12V实验结果也列入其中。
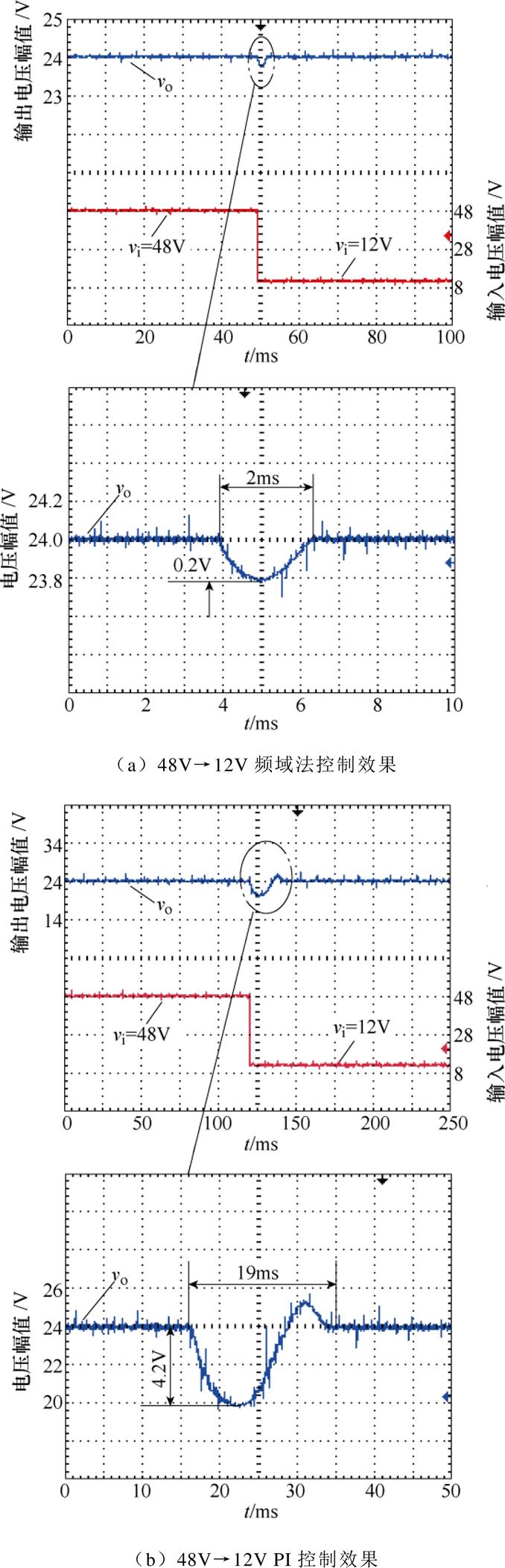
图12 抗输入电压扰动波形
Fig.12 Waveforms of anti-input voltage disturbance
由表3分析可看出,采用本文提出的先优化含有RHPZ的Buck-Boost变换器参数,再进行频域法设计的控制效果明显比PI控制器的输出电压畸变率和系统收敛时间有较显著的改善;虽然本文实验中的PI参数还有继续优化的可能,但其本身的频域特性决定了它不可能同时获得较好的幅值和相位裕度,因此也就不可能具有强鲁棒性能。实验结果验证了本文提出的控制策略的有效性及可行性。
表3 频域法控制与PI控制性能比较
Tab.3 Performance comparison between frequency domain control and PI control

控制算法扰动条件输出电压畸变率(%)收敛时间/ms PI控制负载电流io/A0→4.898.817.0 2.4→4.844.612.0 0→2.428.611.5 输入电压vi/V48→1222.519.0 24→1211.69.7 频域法负载电流io/A0→4.812.96.5 2.4→4.84.65.0 0→2.43.43.3 输入电压vi/V48→120.82.0 24→120.30.9
本文对含有RHPZ的开关DC-DC变换器的暂态性能及频域法设计方法进行了研究,以Buck- Boost变换器为例,给出了负调电压的评价性能指标,建立了负调电压暂态数学模型,给出了负调电压抑制的方法和步骤,完成了基于频域法的控制器参数设计,并进行了实验验证,得到如下结论:
1)含有RHPZ的非隔离式开关DC-DC变换器的电源输入端具有相同的电路拓扑特征,考虑到系统运行的安全性,需要限制最大占空比。
2)含有RHPZ的开关DC-DC变换器通过对参数优化设计可以有效地抑制负调电压,从而提高系统暂态性能。
3)含有RHPZ的开关DC-DC变换器中,限制最大占空比可以有效抑制由于占空比太大而引起的负调电压现象,同时可以解决由于RHPZ的存在而导致的系统不稳定性现象。
4)通过对含有RHPZ的开关DC-DC变换器负调电压有效抑制,提高了系统的暂态性能,变换器暂态数学模型可忽略RHPZ,系统近似为最小相位系统,可采用频域法进行控制器设计,从而利用幅值裕度和相位裕度对控制器设计效果进行衡量,克服了控制器设计的盲目性,保证系统具有良好的暂态和稳态性能。本文提出的负调电压抑制和控制器设计方法对其他含有PHRZ的电力电子变换器设计具有指导意义。
附 录
由式(4)可得

 (A1)
(A1)
将式(A1)化简可得

(A2)
令式(A2)等于零,可得负调电压峰值时间tp为
 (A3)
(A3)一般情况下, 的值较小,根据麦克劳林公式,满足arctanX≈X的条件,对式(A3)化简可得式(5)。
的值较小,根据麦克劳林公式,满足arctanX≈X的条件,对式(A3)化简可得式(5)。
参考文献
[1] Gu Yu, Zhang Donglai, Zhao Zhongyang. Input/ output current ripple cancellation and RHP zero elimination in a Boost converter using an integrated magnetic[J]. IEEE Transactions on Power Electronics, 2015, 30(2): 747-756.
[2] 林雪凤, 许建平, 周翔. 谐振软开关耦合电感高增益DC-DC变换器[J]. 电工技术学报, 2019, 34(4): 747-755.
Lin Xuefeng, Xu Jianping, Zhou Xiang. Soft- switched high step-up DC-DC converter with coupled inductor of resonance[J]. Transactions of China Electrotechnical Society, 2019, 34(4): 747-755.
[3] 王萍, 陈博, 王议锋, 等. 一种隔离多谐振双向DC-DC变换器[J]. 电工技术学报, 2019, 34(8): 1667-1676.
Wang Ping, Chen Bo, Wang Yifeng, et al. A multi resonant bidirectional DC-DC converter[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(8): 1667-1676.
[4] 徐恒山, 尹忠东, 赵雨山, 等. 基于三参数优化设计高效率交错Boost变流器的方法[J]. 电工技术学报, 2018, 33(6): 1328-1336.
Xu Hengshan, Yin Zhongdong, Zhao Yushan, et al. The optimal design method of high efficiency inter- leaved Boost converter based on three parameters[J]. Transactions of China Electrotechnical Society, 2018, 33(6): 1328-1336.
[5] 魏川翔, 罗全明, 俎阿倩, 等. 一种有源电容变换器的分析与设计[J]. 电工技术学报, 2019, 34(12): 2539-2548.
Wei Chuanxiang, Luo Quanming, Zu Aqian, et al. Analysis and design of an active capacitor con- verter[J]. Transactions of China Electrotechnical Society, 2019, 34(12): 2539-2548.
[6] 曾绍恒, 周国华, 周述晗, 等. 电流型控制三态Boost变换器的小信号建模与负载瞬态特性分析[J].电工技术学报, 2019, 34(7): 1468-1477.
Zeng Shaohuan, Zhou Guohua, Zhou Shuhan, et al. Small-signal modeling and load transient characte- ristic analysis of current mode controlled tri-state Boost converter[J]. Transactions of China Electro- technical Society, 2019, 34(7): 1468-1477.
[7] Calvente J, Martinez-Salamero L, Valderrama H, et al. Using magnetic coupling to eliminate right half-plane (RHP) zero[J]. IEEE Transactions on Power Electro- nics, 2004, 2(2): 58-62.
[8] Tan S C, Lai Y M, Tse C K, et al. A fast-response sliding-mode controller for Boost-type converters with a wide range of operating conditions[J]. IEEE Transactions on Power Electronics, 2007, 54(6): 3276-3286.
[9] Niraj R, Arnab G, Subrata B. A novel interleaved tri-state Boost converter with lower ripple and improved dynamic response[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5456-5465.
[10] Huang Han Hsiang, Chen Chilin, Wu Dianrung. Solid-duty-control technique for alleviating the right half plane zero effect in continuous conduction mode Boost converters[J]. IEEE Transactions on Power Electronics, 2012, 27(1): 354-359.
[11] Kapat S, Patra A, Banerjee S. A current-controlled tristate Boost converter with improved performance through RHP zero elimination[J]. IEEE Transaction on Power Electronics, 2009, 24(3): 776-786.
[12] Zhang Yan, Liu Jinjun, Zhuo Dong. Dynamic performance improvement of diode-capacitor-based high step-up DC-DC converter throughright-half- plane zero elimination[J]. IEEE Transactions on Power Electronics, 2017, 32(8): 6532-6543.
[13] 皇金锋, 李良井, 刘树林, 等. Boost变换器全动态范围负调电压建模与暂态性能提高方法[J]. 电工技术学报, 2018, 33(4): 865-873.
Huang Jinfeng, Li Liangjing, Liu Shulin, et al. The improvement method of transient performance within the full dynamic range for Boost converter[J]. Transactions of China Electrotechnical Society, 2018, 33(4): 865-873.
[14] 苏善伟, 朱波, 向锦武, 等. 非线性非最小相位系统的控制研究综述[J]. 自动化学报, 2015, 41(1): 9-18.
Su Shanwei, Zhu Bo, Xiang Jinwu, et al. A survey on the control of nonlinear non-minimum phase systems[J]. Acta Automatica Sinica, 2015, 41(1): 9-18.
[15] 皇金锋, 刘树林. DC-DC变换器负调电压产生机理分析与抑制[J]. 电工技术学报, 2016, 31(21): 168- 175.
Huang Jinfeng, Liu Shulin. Negative voltage mecha- nism analysis and suppression for DC-DC con- verter[J]. Transactions of China Electrotechnical Society, 2016, 31(21): 168-175.
[16] 叶林奇, 宗群, 田栢苓, 等. 非最小相位系统跟踪控制综述[J]. 控制理论与应用, 2017, 34(2): 141- 158.
Ye Linqi, Zong Qun, Tian Bailing, et al. Tracking control of nonminimum phase systems: an over- view[J]. Control Theory & Applications, 2017, 34(2): 141-158.
[17] Roshan Y M. Control of non-minimum phase load current in a Boost converter using output redefi- nition[J]. IEEE Transactions on Power Electronics, 2014, 29(9): 5054-5062.
[18] 李小龙, 徐顺刚, 许建平, 等. 一种单电感双向电池均衡电路[J]. 电机与控制学报, 2019, 23(4): 90-97.
Li Xiaolong, Xu Shungang, Xu Jianping, et al. Single-inductor birdirectional battery equalinzer[J]. Electric Machines and Control, 2019, 23(4): 90-97.
[19] 张卫平. 开关变换器的建模与控制[M]. 北京: 中国电力出版社, 2006.
[20] 徐德鸿. 电力电子系统建模及控制[M]. 北京: 机械工业出版社, 2006.
Transient Performance Analysis and Frequency Domain Design of Switched DC-DC Converters with Right Half Plane Zero
Abstract When the duty cycle of switched DC-DC converter with right half-plane zero (RHPZ) changes abruptly, negative tuning will occur in the transient process. This phenomenon will lead to the deterioration of the transient performance of the system. The negative tuning duration period system is prone to form positive feedback and instability. The traditional frequency domain method cannot directly design the controller, so it is necessary to improve the performance of the system. Row control is more difficult than minimum phase system. Taking Buck-Boost converter with RHPZ as an example, this paper establishes a transient mathematical model of negative voltage, derives an expression to measure the performance of negative voltage, and gives a parameter design method to suppress negative voltage based on the relationship between the expression and the parameters of the converter. According to the characteristics of system transient performance after negative voltage regulation suppression and the characteristics of circuit topology of DC-DC converter with RHPZ switch, a control strategy combining limited duty cycle and frequency domain method is proposed. The experimental results show that the control strategy has good transient and steady-state performance.
keywords:Right half plane zero, DC-DC converter, negative voltage regulation, transient performance, frequency domain design
中图分类号:TM46
DOI: 10.19595/j.cnki.1000-6753.tces.190776
皇金锋 男,1978年生,博士,副教授,硕士生导师,研究方向为开关变换器的分析与设计。E-mail: jfhuang2000@163.com(通信作者)
李林鸿 男,1992年生,硕士研究生,研究方向为开关变换器的分析与设计。E-mail: soarllh@163.com
收稿日期 2019-06-25
改稿日期 2019-10-04
国家自然科学基金(51777167)、陕西省教育厅重点实验室计划研究项目(18JS021)和陕西理工大学人才启动项目(SLGQD1808)资助。
(编辑 崔文静)