 (1)
(1)摘要 为改善永磁同步电机(PMSM)三电平供电系统的稳态控制性能,减小计算负担,该文提出一种基于新型矢量分区的PMSM三电平双矢量模型预测磁链控制方法。首先,将电磁转矩和磁链的控制转化为对单一定子磁链矢量的控制,从而消除了传统预测转矩控制中的权重系数。进一步,深入分析了不同扇区内基本电压矢量对系统运行的影响,通过构建虚拟斜率将备选矢量数量减少至1~3个;同时,为降低电机转矩脉动,建立了占空比优化准则进而获得了双非零矢量的控制效果。最后,仿真与实验的验证表明该控制策略的有效性。
关键词:永磁同步电机 三电平 模型预测磁链控制 虚拟斜率 转矩脉动 占空比
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其结构简单、体积小、效率高和功率因数高等优点广泛应用于冶金、陶瓷、石油、纺织、汽车等领域[1-2]。传统PMSM控制方法主要有矢量控制(Vector Control, VC)和直接转矩控制(Direct Torque Control, DTC)[3-4]。VC虽然能够获得像直流电动机一样良好的动态特性,但存在坐标变换复杂、对电机参数依赖性大等缺点;DTC虽然具有结构简单、响应速度快的优点,同时也存在实时性要求高、计算量大等缺点。因此,为进一步提高系统的控制性能,模型预测控制(Model Predictive Control, MPC)受到了研究者们的广泛关注[5-7]。
MPC是产生于20世纪70年代后期的一种计算机控制算法,在电机驱动系统中,根据控制目标不同可分为模型预测电流控制(Model Predictive Current Control, MPCC)和模型预测转矩控制(Model Predictive Torque Control, MPTC)。MPTC采用价值函数在线寻优的思想,来获取逆变器输出的最优电压矢量,不仅能够提高系统的动态响应,而且在一定程度上可减小转矩脉动、提高系统的稳态性能[8]。但是,由于转矩与磁链量纲不同,传统MPTC需要对权重系数进行设计,而权重系数的设计又缺乏统一的指导策略,需要通过大量的仿真和实验来确定最优权重,是一项比较繁琐的任务[9-11]。
随着电力电子技术的发展,二极管中点钳位式(Neutral-Point-Clamped, NPC)三电平逆变器以其更小的电压应力、更宽泛的矢量选择范围等优点得到了广泛应用[12-13]。然而,需要注意的是,NPC三电平逆变器能够稳定运行的前提是中点电位在全工况下均能保持平衡。因此,如何将MPC有效应用于NPC三电平逆变器供电调速系统,以获得更佳的调速性能,值得深入研究。为实现中点电位平衡,文献[14]提出了一种基于中点电位预判的MPC方法,即通过判断中点电位的大小与中点电流的流向,利用正负小矢量对中点电位作用效果相反的特性来控制中点电位。此外,由于三电平逆变器存在27个基本电压矢量,在价值函数选优时需要进行27次判断,计算量繁重,尤其是在多步预测和多矢量控制中,系统的运算量更是成指数增加,较大的计算量会引起系统一定的处理延时,导致预测不准确。因此,如何降低MPC中系统的计算负担,同样值得深入研究。文献[15-16]通过分析各开关矢量对磁链和转矩的影响,进而构建磁链偏差函数,挑选出对抑制磁链偏差有利的矢量,将备选矢量减少到14个。文献[17]通过限制线电压及相电压的幅值跳变,根据上一时刻的开关状态,将备选矢量的数量减少到4~13个。值得注意的是,上述控制策略虽均能在一定程度上降低预测计算量,但在采样周期内仅作用一个电压矢量,导致其稳态性能较差。为解决该问题,可将占空比引入到MPC策略中,即在一个采样周期内作用两个电压矢量,通过分配最优矢量和第二矢量的作用时间,使被控量在下一时刻能达到参考值,但相关报道主要集中在两电平电驱系统中[18-20],且存在使用单一零矢量可能无法达到控制要求,而引入非零矢量存在第二矢量择优问题。
针对上述问题,本文提出一种基于新型矢量分区的PMSM三电平双矢量模型预测磁链控制(Model Predictive Flux Control, MPFC)方法。首先,利用文献[21]所提出的控制策略,将对电磁转矩和磁链的控制转化为对单一定子磁链矢量的控制来消除权重。然后,将基本空间矢量划分为12个大扇区,再通过虚拟斜率将每个大扇区进一步细化为3个小扇区,从而将备选矢量减少到1~3个。在此基础上,通过建立占空比优化准则,获得了双非零矢量的控制效果,并保证了系统具有较小的计算负担。最后,通过仿真和实验验证了这种方法的可行性。
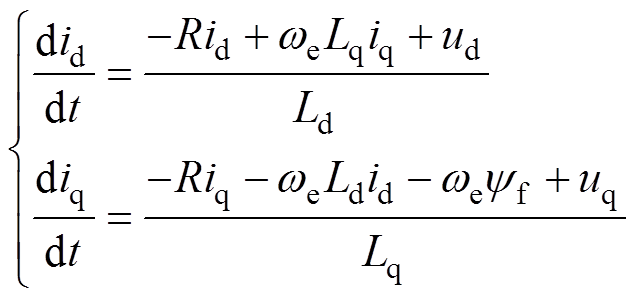
本文以内嵌式PMSM为研究对象,建立dq坐标系下的数学模型。
定子电压方程为
(1)磁链方程为
 (2)
(2)
将式(2)代入式(1)得到新的定子电压方程为
 (3)
(3)电磁转矩方程为
 (4)
(4)
式中,ud、uq为定子电压dq轴分量;id、iq为定子电流dq轴分量;R为定子电阻;yd、yq为定子磁链dq轴分量;we为电角速度;Ld、Lq为dq轴电感分量;yf为永磁体磁链;Te为电磁转矩;np为极 对数。
图1为NPC三电平PMSM双矢量MPFC控制框图,首先将给定转速 与实际转速wr之间的误差,通过转速环PI调节器得到电磁转矩参考值
与实际转速wr之间的误差,通过转速环PI调节器得到电磁转矩参考值 ,再和磁链给定值
,再和磁链给定值 以及负载角d 及其增量Dd 一起送入给定磁链计算模块,得到k+1时刻磁链参考值
以及负载角d 及其增量Dd 一起送入给定磁链计算模块,得到k+1时刻磁链参考值 ;再将和
;再将和 送入价值函数进行滚动优化,得到使价值函数最小的作用矢量;然后,通过优化占空比计算模块得到第二作用矢量;最后经过中点电位平衡后,得到对抑制中点电位波动有利的开关状态送入逆变器驱动电机。
送入价值函数进行滚动优化,得到使价值函数最小的作用矢量;然后,通过优化占空比计算模块得到第二作用矢量;最后经过中点电位平衡后,得到对抑制中点电位波动有利的开关状态送入逆变器驱动电机。
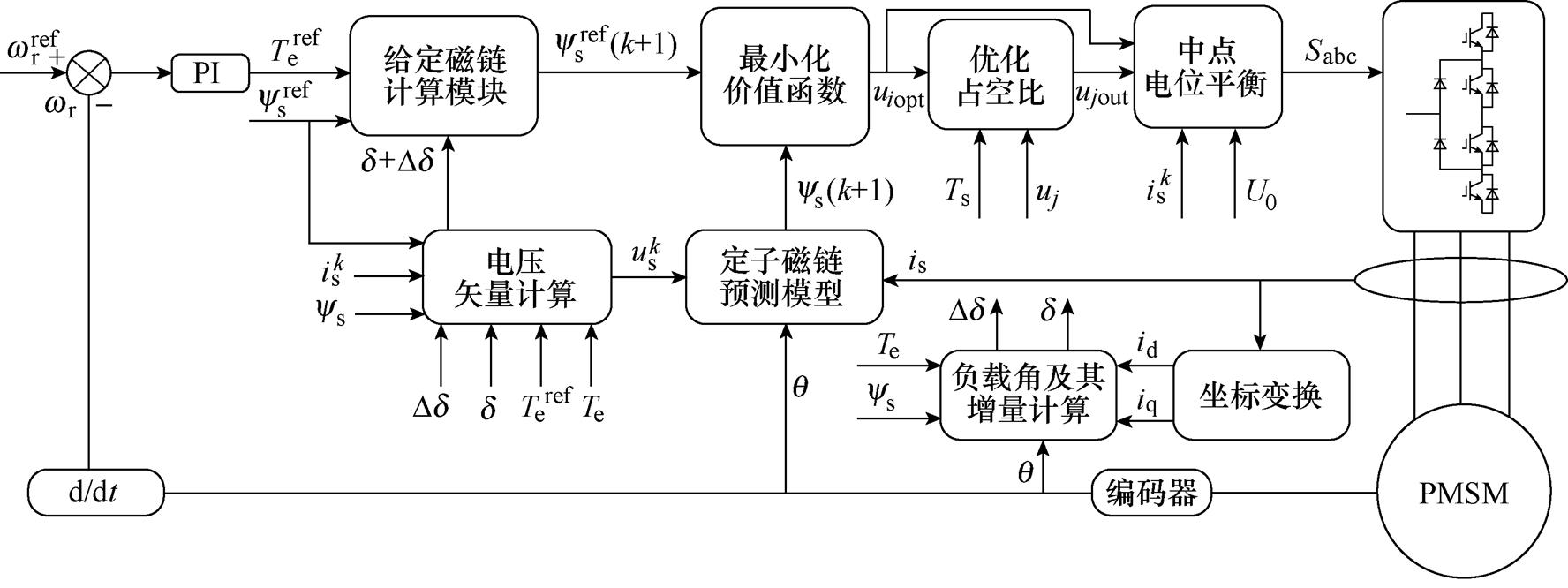
图1 NPC三电平PMSM双矢量MPFC控制框图
Fig.1 The block diagram of NPC three-level based PMSM with double-vector-based MPFC
将式(3)进行移项整理,可得PMSM定子电流的瞬时表达式为
 (5)
(5)利用欧拉式
 (6)
(6)
将PMSM电流微分方程式(5)进行离散化,得到电流预测模型为
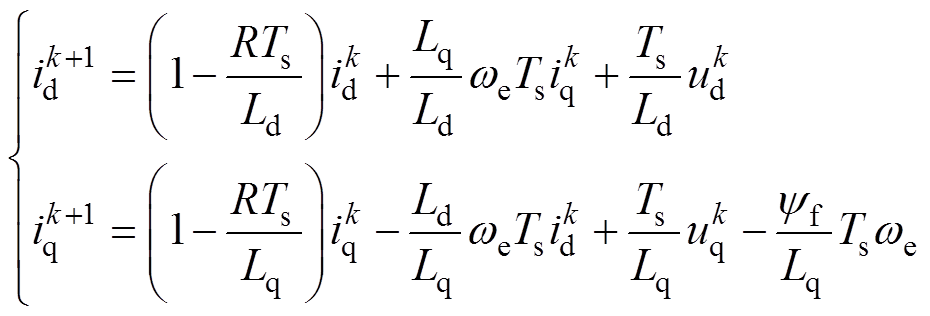 (7)
(7)式中,Ts为系统的采样周期; 、
、 为k时刻定子电流在dq轴上的测量值;
为k时刻定子电流在dq轴上的测量值; 、
、 为k+1时刻定子电流在dq轴上的预测值;
为k+1时刻定子电流在dq轴上的预测值; 、
、 为k时刻定子电压在dq轴的分量。
为k时刻定子电压在dq轴的分量。
通过Park变换可以得到ab-dq坐标下的电压变换方程为
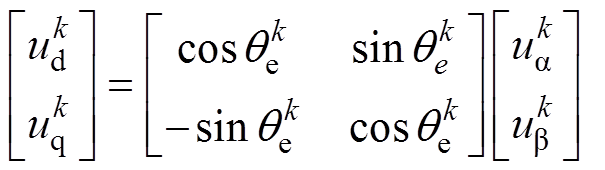 (8)
(8)式中, 、
、 为k时刻定子电压在ab 轴上的分量;
为k时刻定子电压在ab 轴上的分量; 为k时刻转子电角度。、为
为k时刻转子电角度。、为
 (9)
(9)
其中

式中,Udc为逆变器直流母线电压;Sa、Sb、Sc为A、B、C三相的开关状态,Si=[0 1 2],i=a, b, c。
将式(7)代入式(4)后,可得k+1时刻转矩预测值 的表达式为
的表达式为
 (10)
(10)k时刻dq轴定子磁链可以表示为
 (11)
(11)
式中,ys为yd、yq合成磁链ys(k)的幅值;d 为ys(k)与d轴之间的负载角。
将式(11)代入电磁转矩方程式(4),得到
 (12)
(12)将式(12)对d 求导得到转矩微分方程为
 (13)
(13)
将式(13)改写为增量形式并整理后得到
 (14)
(14) (15)
(15)
式中,Dd 为磁链ys(k)与d轴之间的负载角增量;DTe为电磁转矩增量; 为k+1时刻负载角d 的参考值。
为k+1时刻负载角d 的参考值。
根据式(11)、式(14)和式(15)可以得到k+1时刻dq轴上的参考磁链方程为
 (16)
(16)式中, 为k+1时刻d轴磁链参考值;
为k+1时刻d轴磁链参考值; 为k+1时刻q轴磁链参考值。
为k+1时刻q轴磁链参考值。
根据式(7)和式(2)可以得到k+1时刻dq轴磁链 、
、 方程为
方程为
 (17)
(17)可以建立不含权重系数的MPFC价值函数为
 (18)
(18)
图2所示为NPC三电平基本空间矢量分布。NPC三电平逆变器在空间上有27个基本电压矢量,其中包括3个零矢量、12个正负冗余小矢量、6个中矢量和6个大矢量。传统的NPC三电平逆变器最优矢量选择是将所有的空间电压矢量依次送入价值函数进行选优,但这种方法需要对27个电压矢量进行判断,尤其是在多矢量或多步预测的控制中,判断次数更是会成指数增加,这将会增加系统的计算负担。因此,通过一种改进NPC三电平空间矢量分区筛选策略来有效减少备选矢量的数量。
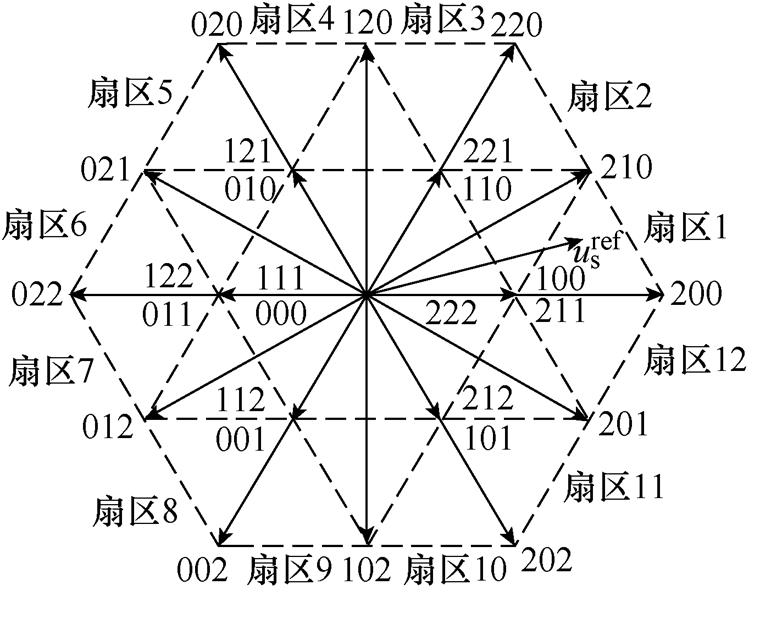
图2 NPC三电平基本空间矢量分布
Fig.2 Basic space vector distribution of NPC three-level inverter
在进行矢量筛选之前,要对参考电压矢量所在的扇区进行判断,首先对PMSM的三相电流ia、ib、ic进行Clarke变换得到ab 坐标下的电流方程为
 (19)
(19)式中,isa、isb 分别为ab 坐标下a 轴、b 轴的电流 分量。
将磁链方程式(2)进行Park反变换得到ab 坐标下的磁链方程为
 (20)
(20)式中,ysa、ysb 分别为ab 坐标下a 轴、b 轴的磁链分量。
ysa、ysb 合成磁链与a 轴之间的夹角qs为
 (21)
(21)根据定子磁链无差拍控制原则[22], ,则k+1时刻参考电压矢量
,则k+1时刻参考电压矢量 在ab 的分量可表示为
在ab 的分量可表示为
 (22)
(22)
式中, 为k+1时刻a 轴电压的参考值;
为k+1时刻a 轴电压的参考值; 为k+1时刻b 轴电压的参考值。
为k+1时刻b 轴电压的参考值。
则与a 轴的夹角 的表达式为
的表达式为
 (23)
(23)根据 的值可以判断出参考电压矢量所在扇区,当0<
的值可以判断出参考电压矢量所在扇区,当0< <p/6时,参考电压矢量位于扇区1,当p/6<<p/3时,参考电压矢量位于扇区2,以此类推,可以判断出参考电压矢量的扇区位置。在图2中,电压矢量空间被划分为12个扇区,每个扇区包含有三个零矢量、两个小矢量、一个中矢量和一个大矢量。需要注意的是,为抑制电压矢量的跳变、降低电压变化率,根据矢量就近原则,将参考矢量所在扇区内的基本矢量作为备选矢量以减少备选矢量的数量,同时保证良好的控制性能。接下来以扇区1为例为进一步说明备选矢量的筛选策略。
<p/6时,参考电压矢量位于扇区1,当p/6<<p/3时,参考电压矢量位于扇区2,以此类推,可以判断出参考电压矢量的扇区位置。在图2中,电压矢量空间被划分为12个扇区,每个扇区包含有三个零矢量、两个小矢量、一个中矢量和一个大矢量。需要注意的是,为抑制电压矢量的跳变、降低电压变化率,根据矢量就近原则,将参考矢量所在扇区内的基本矢量作为备选矢量以减少备选矢量的数量,同时保证良好的控制性能。接下来以扇区1为例为进一步说明备选矢量的筛选策略。
图3所示为扇区1的基本空间矢量分布,包括零矢量(000 111 222)、小矢量(100 211)、中矢量(210)和大矢量(200)。由于在选择第二矢量时考虑了零矢量,所以在进行最优矢量筛选时不予考虑,因此将备选矢量由7个减少到了4个。由于正负冗余小矢量的方向和大小相同,仅对中点电位的影响相反,所以在备选矢量的筛选中统一只考虑负小矢量,而正小矢量放入中点电位平衡控制中进行考虑,因此将备选矢量减少到了3个,在图3中表示为小矢量100、中矢量210和大矢量200。
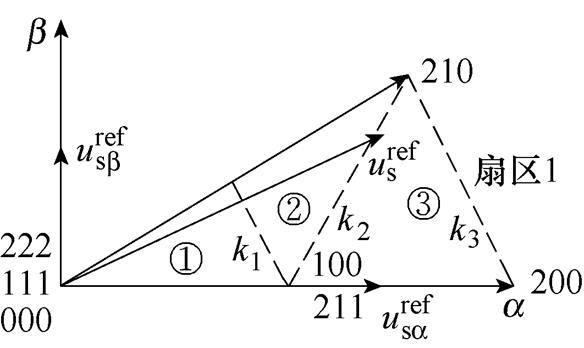
图3 扇区1的基本空间矢量分布
Fig.3 The basic space vector distribution in Sector 1
为进一步减少备选矢量的数量,在图3中引入了虚拟斜率k1、k2和k3(在图3中以虚线表示),通过虚拟斜率将扇区1分为①、②、③三个小扇区,小扇区的判别方程为
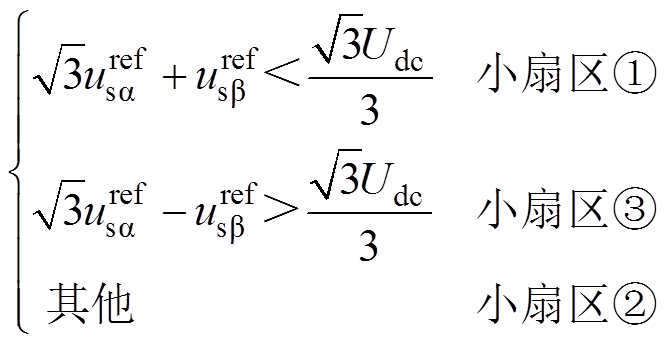 (24)
(24)考虑到作用电压矢量应尽可能靠近参考电压矢量,当参考电压矢量位于小扇区①时,最优矢量只有100;当参考电压矢量位于小扇区②时,最优矢量为100或210;当参考电压矢量位于小扇区③时,最优矢量为100、210或200。通过这种控制策略将备选矢量由3个减少到了1~3个。以此类推,通过简单的变换可以得到12个扇区的备选矢量筛选见表1。
表1 备选矢量筛选
Tab.1 Alternative vector activation
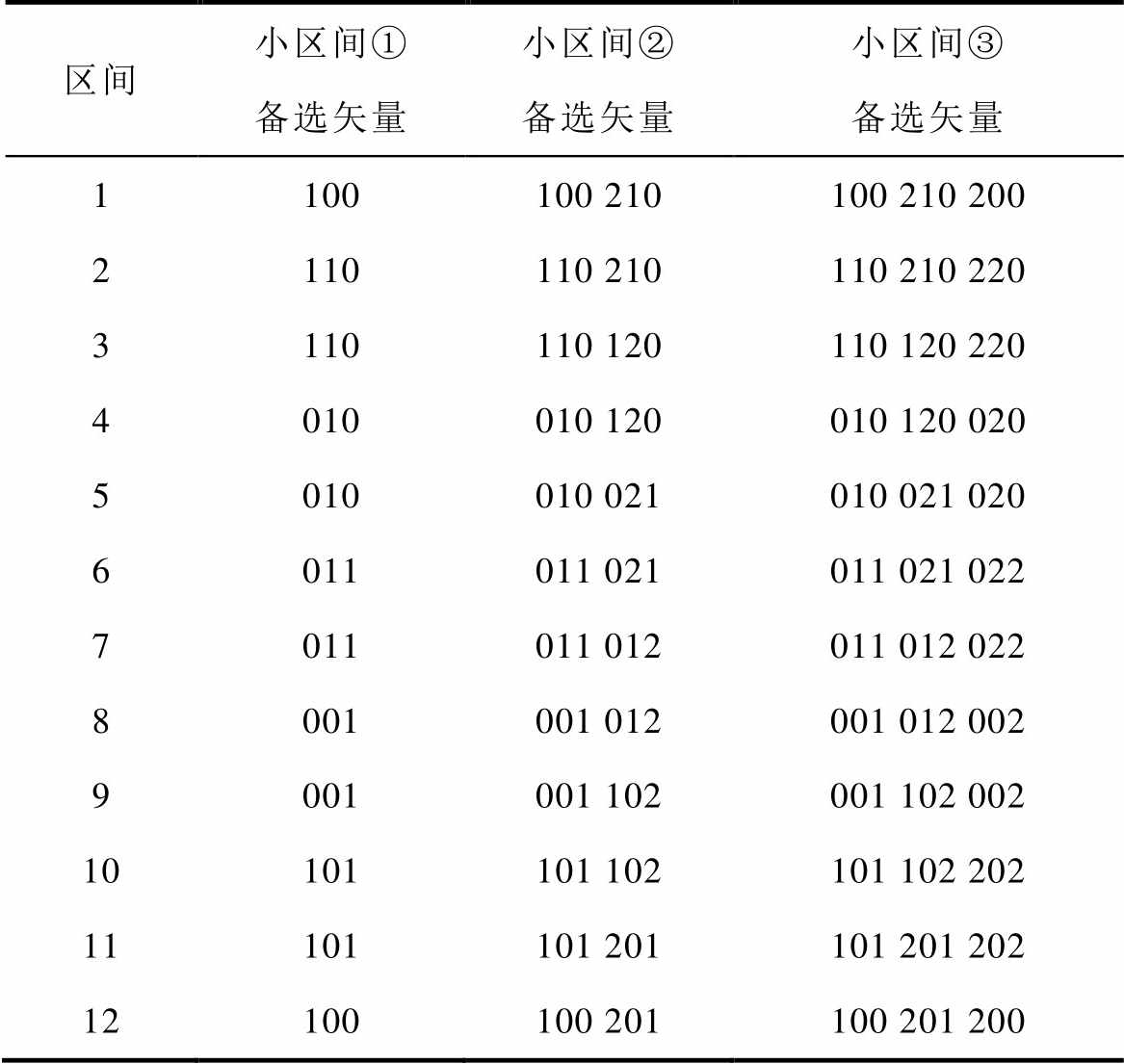
区间小区间①备选矢量小区间②备选矢量小区间③备选矢量 1100100 210100 210 200 2110110 210110 210 220 3110110 120110 120 220 4010010 120010 120 020 5010010 021010 021 020 6011011 021011 021 022 7011011 012011 012 022 8001001 012001 012 002 9001001 102001 102 002 10101101 102101 102 202 11101101 201101 201 202 12100100 201100 201 200
图4为基于NPC三电平逆变器的PMSM等效模型,与两电平逆变器相比,NPC三电平逆变器提供了更多的基本电压矢量,因此获得了更好的控制性能,但是也存在中点电位不平衡的问题。由于中点电流inp不为零,从而导致直流侧电容的充放电,这是引起中点电位U0波动的根本原因。NPC三电平逆变器中点电流inp的瞬时值可以表示为
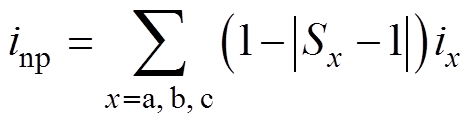 (25)
(25)式中,Sx=0, 1, 2(x=a, b, c),当Sx=2,0时,1−|Sx-1|=0,此时中点电流inp=0;当Sx=1时,1−|Sx-1|=1,此时负载电流会对inp造成影响。
从以上分析可以看出,零矢量和大矢量对中点电流无影响,仅小矢量和中矢量对中点电流有影响。对图4进行分析,规定电流流入电机的方向为电机A、B、C三相电流ia、ib、ic的正方向,此时中小矢量对中点电位的影响见表2。由表2可以看出,正、负冗余小矢量将对中点电位产生完全相反的控制效果,因此当MPFC应用小矢量时,可以通过判断当前中点电位的状态,来选择对抑制中点电位有利的小矢量,从而平衡中点电位。
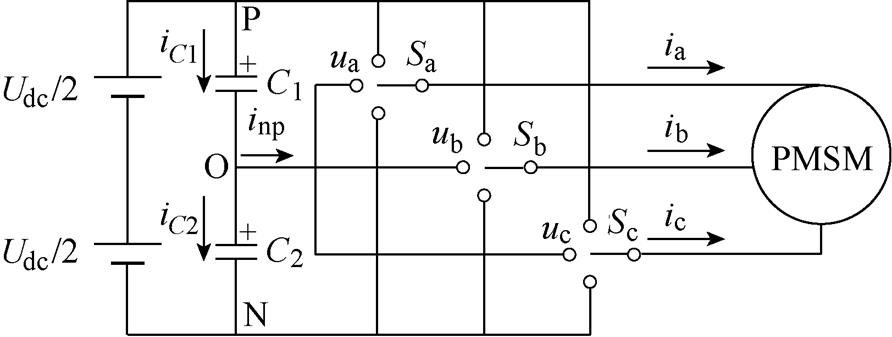
图4 基于NPC三电平逆变器的PMSM等效模型
Fig.4 Equivalent model of NPC three-level inverter based PMSM drive
表2 中小矢量对中点电位的影响
Tab.2 The influence of medium and small vectors on neutral point potential

小矢量U0小矢量U0中矢量U0 100减小211增大210减小 221增大110减小120减小 010减小121增大021减小 122增大011减小012减小 001减小112增大102减小 212增大101减小201减小
通过价值函数式(18)可以获得最优作用矢量。对于传统以零矢量作为第二作用矢量的占空比控制策略,是通过分配最优作用矢量与零矢量的作用时间,使被控量在下一时刻的预测值能够达到参考值,图5所示为基于零矢量的传统占空比计算示意图。由于采用id=0的控制策略,且电机的Ld和Lq非常小,因此电磁转矩主要受q轴电流影响,而yq=Lqiq,故采用q轴磁链无差拍来计算占空比,即在同一个采样周期中,通过分配最优电压矢量和零电压矢量的作用时间使得yq在k+1时刻达到参考值 ,即有
,即有
 (26)
(26)式中,topt为最优开关矢量作用时间;yq(k)为k时刻q轴磁链;Sopt为最优开关矢量作用时q轴磁链的斜率;S0为零矢量作用时q轴磁链的斜率。根据式(1)和式(2)可以得出S0和Sopt的计算式为
 (27)
(27)
 (28)
(28)式中,uopt_q为最优矢量作用下的q轴电压; 为k时刻最优矢量作用下的q轴电压。整理式(26)~式(28)得到最优矢量的作用时间为
为k时刻最优矢量作用下的q轴电压。整理式(26)~式(28)得到最优矢量的作用时间为
 (29)
(29)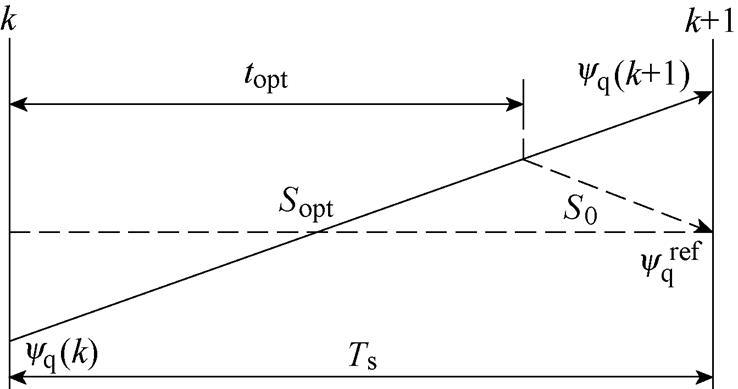
图5 基于零矢量的占空比计算示意图
Fig.5 Schematic diagram of duty ratio calculation based on zero vector
通过上述方法能够计算出最优矢量和零矢量的作用时间,但是这种方法也存在一定的缺陷,在图6所示优化占空比计算示意图中进一步说明。对于最优作用矢量u1,零矢量u0的作用只会使k+1时刻磁链的预测值更大程度地偏离参考值,此时零矢量将失去调节作用,但是对于非零矢量u2(u2的斜率为Sopty),通过分配与u1之间的占空比,能够使k+1时刻的磁链预测值达到参考值,因此,第二个矢量不固定为零矢量能够获得更好的控制效果。但是对于NPC三电平逆变器,基本电压矢量有27个,即使通过2.3节所述的扇区划分的方法来进行矢量筛选,也存在有包括零矢量在内最多6个备选矢量,当第二矢量不固定为零矢量时,需要对6个备选矢量分别与最优矢量结合计算占空比,再进行选优,增大了系统的运行负担。针对上述问题,通过图7所示的优化占空比计算流程所述的方法来解决第二作用矢量为零矢量时所存在的缺陷,同时又可以降低将非零矢量作为第二作用矢量时系统的运算负担。具体计算步骤如下:

图6 优化占空比计算示意图
Fig.6 Schematic diagram of duty ratio optimization calculation
(1)根据式(27)计算零矢量的作用斜率S0,再将最优电压矢量uopt的q轴分量代入式(28)获得最优矢量作用斜率Sopt。

图7 优化占空比计算流程图
Fig.7 Flow chart for duty cycle optimizing calculation
(2)根据式(29)获得最优矢量作用时间topt,判断topt是否在0~Ts之间,如果满足该条件,则使用零矢量作为第二矢量,分配两个矢量的作用时间并结束计算,否则将扇区内其他基本电压矢量uj的q轴分量代入式(28)获得uj的作用斜率Sj。
(3)将式(29)中的S0替换为Sj,计算最优矢量作用时间topt并判断是否在0~Ts之间,如果满足条件则挑选该电压矢量作为第二矢量,分配两个矢量的作用时间并结束计算,如果不满足条件,判断是否j>1,如果j<1则使j=2继续执行步骤(3),如果j>1则判断topt的值,当topt>Ts则使最优矢量作用整个采样周期,当topt<0则使零矢量作用整个采样周期。
为验证本文所提出的PMSM三电平双矢量MPFC控制算法的可行性,通过Matlab/Simulink对该控制算法进行了仿真研究。PMSM主要参数见 表3。仿真中直流母线电压300V;直流母线分压电容470mF;系统的采样频率5kHz。
图8是单双矢量MPFC条件下的NPC三电平逆变器线电压仿真,可以看出图8a单矢量MPFC和图8b双矢量MPFC的NPC三电平逆变器的线电压均有5个电平,因此可以获得较好的正弦度,这是三电平逆变器本身结构上的优势。
表3 PMSM主要参数
Tab.3 Main parameters of PMSM
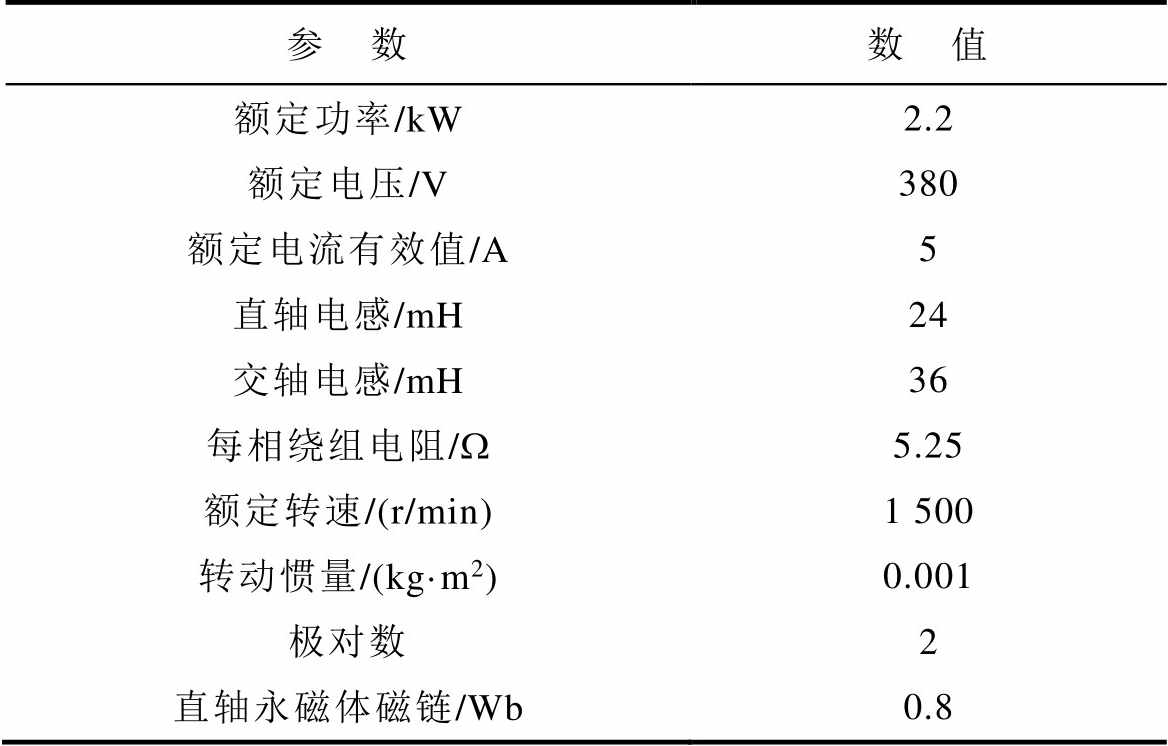
参 数数 值 额定功率/kW2.2 额定电压/V380 额定电流有效值/A5 直轴电感/mH24 交轴电感/mH36 每相绕组电阻/W5.25 额定转速/(r/min)1 500 转动惯量/(kg·m2)0.001 极对数2 直轴永磁体磁链/Wb0.8
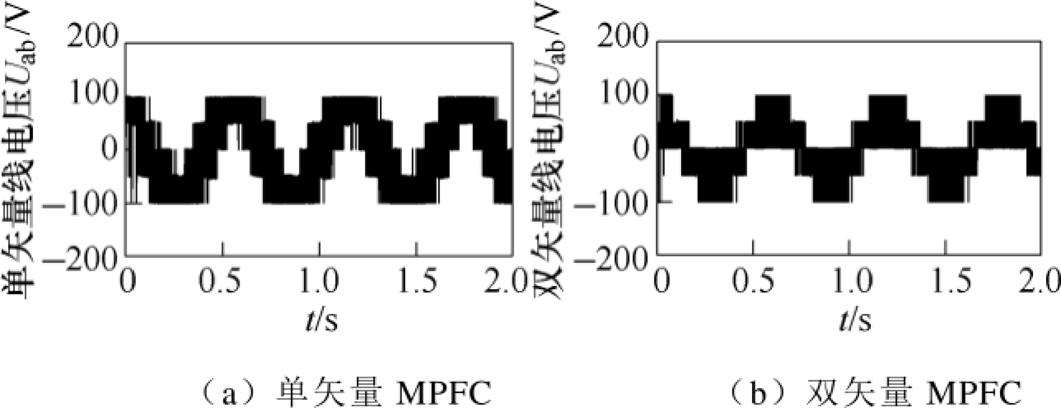
图8 NPC三电平逆变器线电压仿真
Fig.8 Simulation results of line voltages in NPC three-level inverter
图9是中点电位平衡控制仿真,在t =1之前不进行中点电位控制,此时图9b的中点电位上升到150V,图9a电流波形出现尖峰且正弦度变差;在t =1时刻加入中点电位平衡控制,此时中点电位快速下降,最终被抑制在0V附近,且电流波形得到改善。
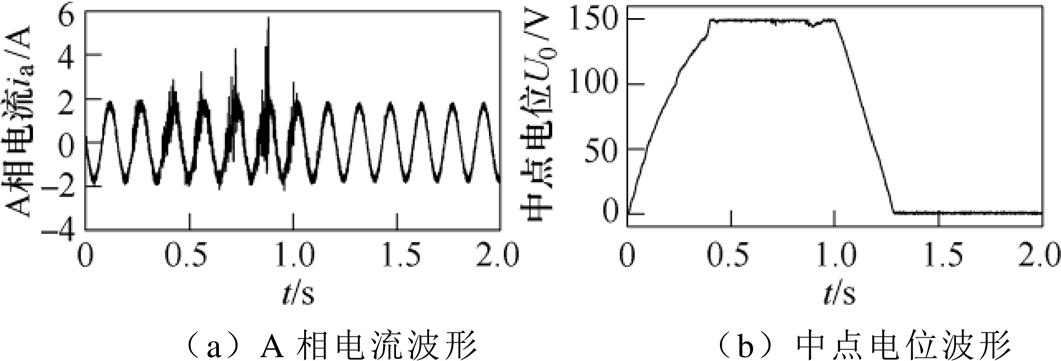
图9 中点电位平衡控制仿真
Fig.9 Simulation results of neutral voltage balance control
为进一步比较单矢量MPFC和本文所提出的双矢量MPFC的稳态性能,对这两种控制策略,给定转速200r/min,给定负载6N·m,进行仿真验证。图10所示为单、双矢量MPFC稳态波形,此时图10a单矢量的转矩脉动为50%,而图10b双矢量的转矩脉动仅有17%;对比两种方案的电流谐波总畸变率(Total Harmonic Distortion, THD),单矢量电流THD为19.65%,而双矢量电流THD仅有6.51%。通过对两种方案的比较可以看出双矢量MPFC的稳态性能更好。
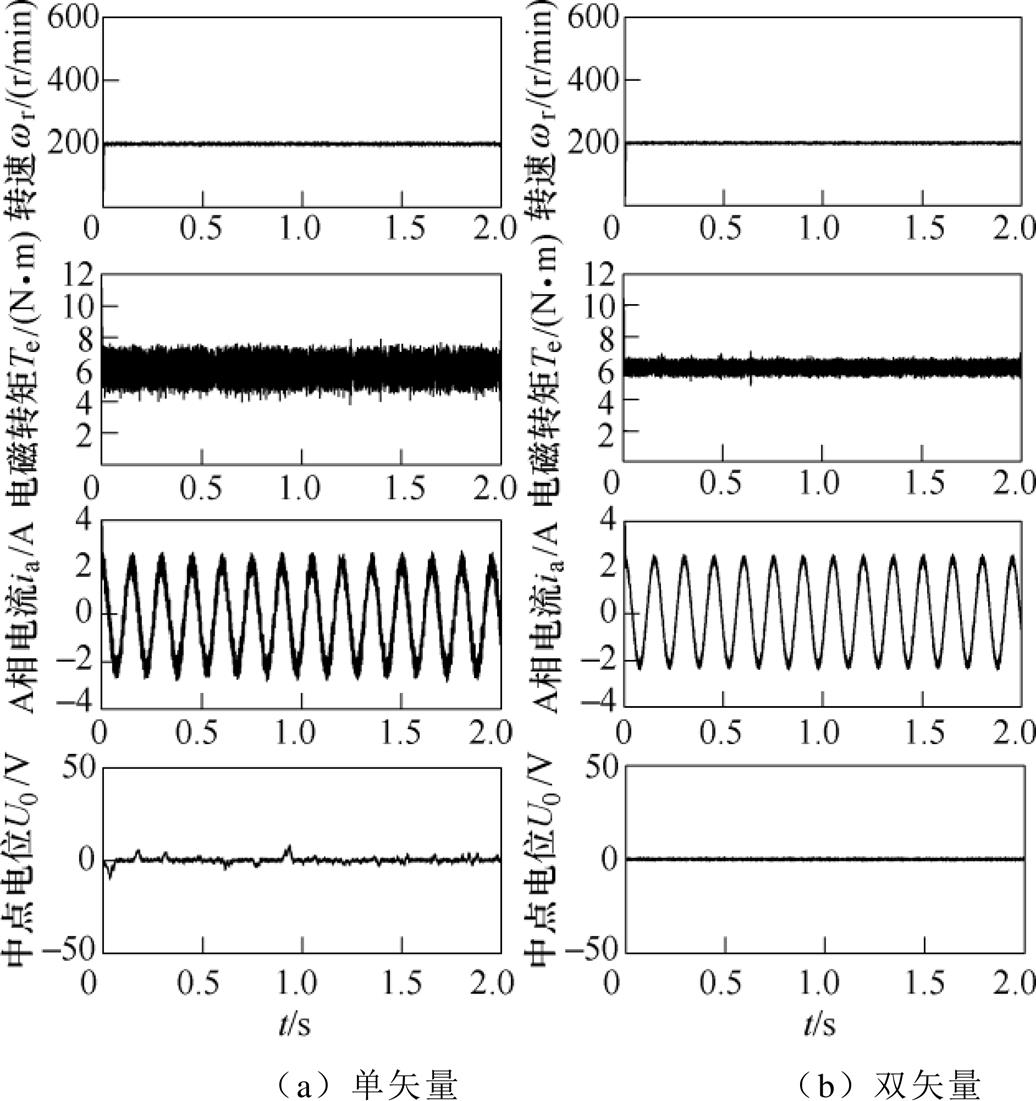
图10 单、双矢量MPFC稳态波形
Fig.10 Steady-state waveforms of single-vector and double-vector MPFC
为分析两种方案的动态性能,图11所示为在转矩突变条件下,给定转速为200r/min,初始负载为4N·m,在t=1时刻突变到6N·m的仿真波形。对于转矩的突变,两种方案的转速略有波动,但能够快速跟踪到给定转速,且电流波形能够快速响应转矩的突变,保持良好的正弦度。
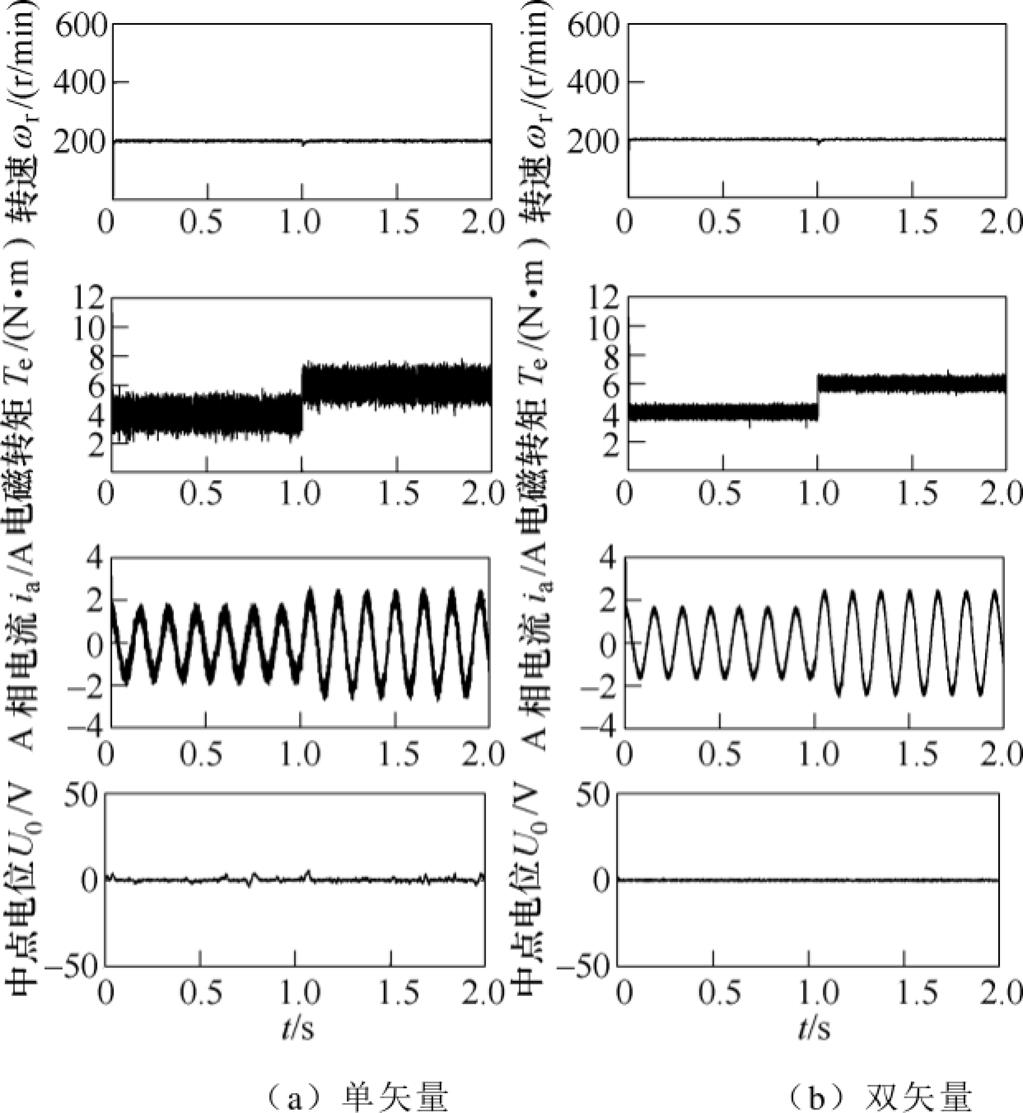
图11 转矩突变条件下的仿真波形
Fig.11 Simulation waveforms during torque step-change
图12所示为在转速突变条件,给定负载6N·m,初始转速200r/min,在t=1时刻突变到400r/min的仿真波形。对于转速的突变,两种方案均能快速响应,且转速超调均不超过3%,电流波形也能保持良好的正弦度。通过在图11和图12中对两种方案比较,可以看出单、双矢量MPFC动态性能基本一致。
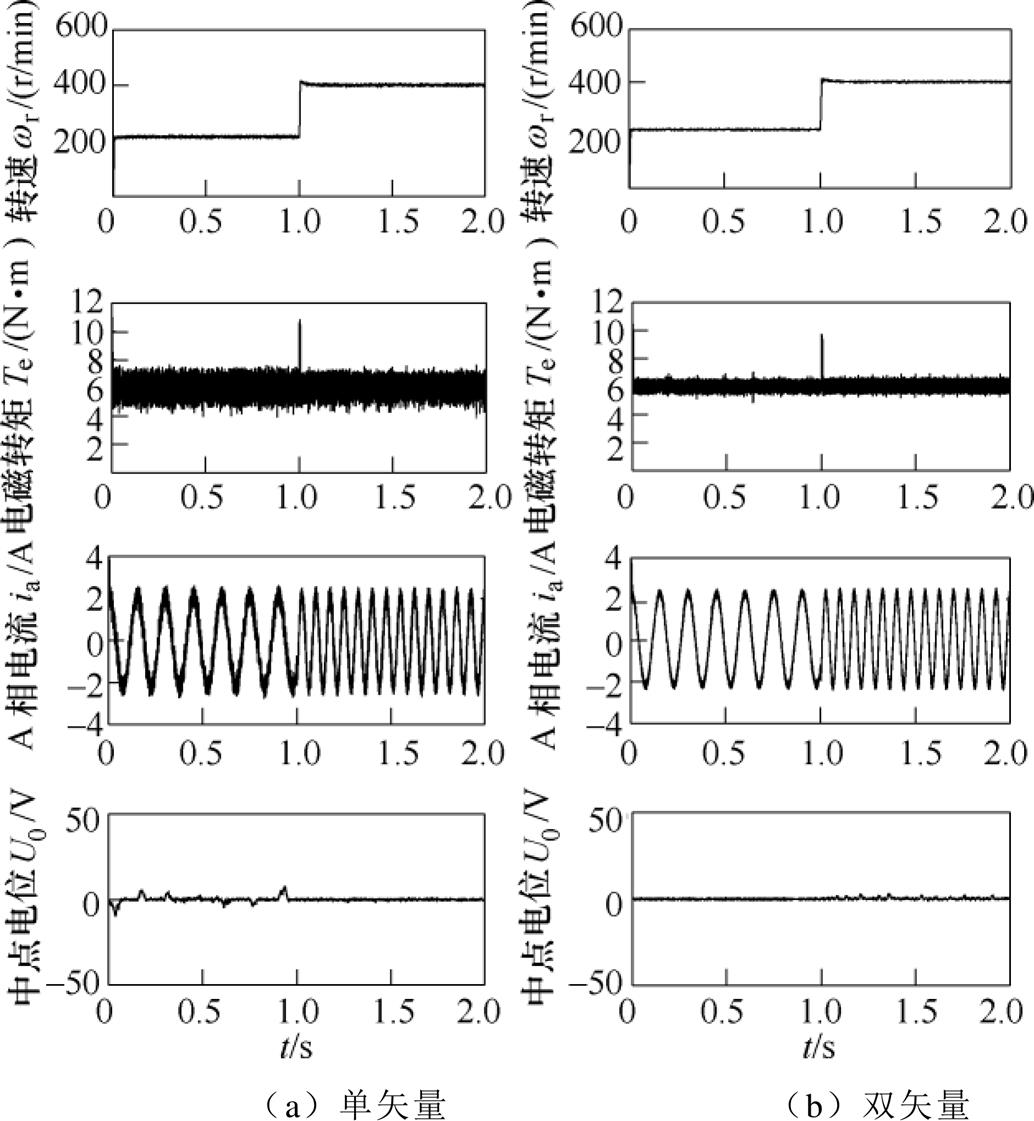
图12 转速突变条件下的仿真波形
Fig.12 Simulation waveforms during speed step-change
为验证理论分析的正确性,本文对一台额定功率为2.2kW的三相PMSM进行了实验研究,实验平台如图13所示。处理器采用dSPACE1104,并与Matlab/Simulink2009a的仿真平台进行连接,通过在Simulink环境下直接编译仿真模型,产生dSPACE1104能够识别的程序代码,进而建立各项参数可在线调节的实验系统。实验电机参数见表3,采用的直流母线电压为300V,采样频率为5kHz,通过改变电机转矩和转速,进而获得PMSM系统的动稳态波形。
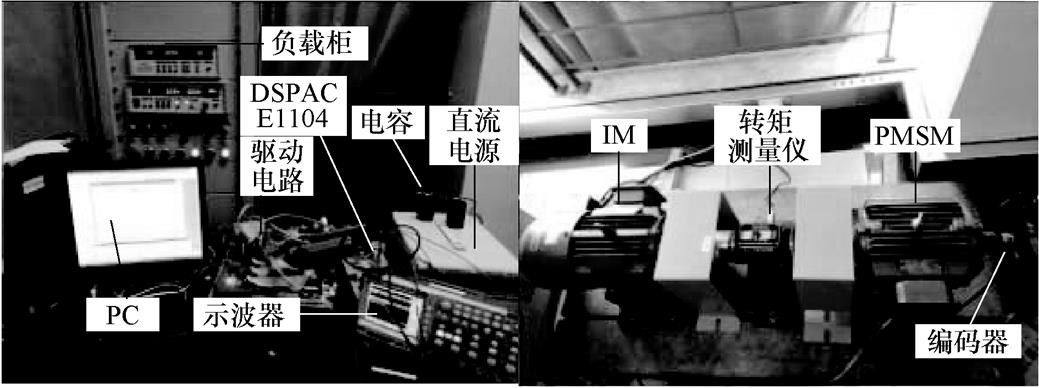
图13 实验平台
Fig.13 Experimental setup
图14是NPC三电平线电压特性实验波形。图14a和图14b分别为单矢量MPFC和双矢量MPFC的线电压波形,由于双矢量控制策略在每个控制周期均考虑了零矢量的作用,因此双矢量线电压波形会出现大量零电平,这与单矢量控制的线电压波形有所不同。通过图14可以看出单、双矢量的NPC三电平线电压的波形均有5个梯度,能够获得较好的正弦度。图15是双矢量MPFC下中点电位平衡实验波形,图15a~图15d分别为300r/min、4N∙m,200r/min、4N∙m,200r/min、6N∙m,200r/min、8N∙m工况下的中点电位平衡实验波形,可以看出当不对中点电位进行控制时,中点电位U0偏离到150V,而加入中点电位平衡控制策略后,中点电位均能迅速回到0V,且电流波形正弦度变好。
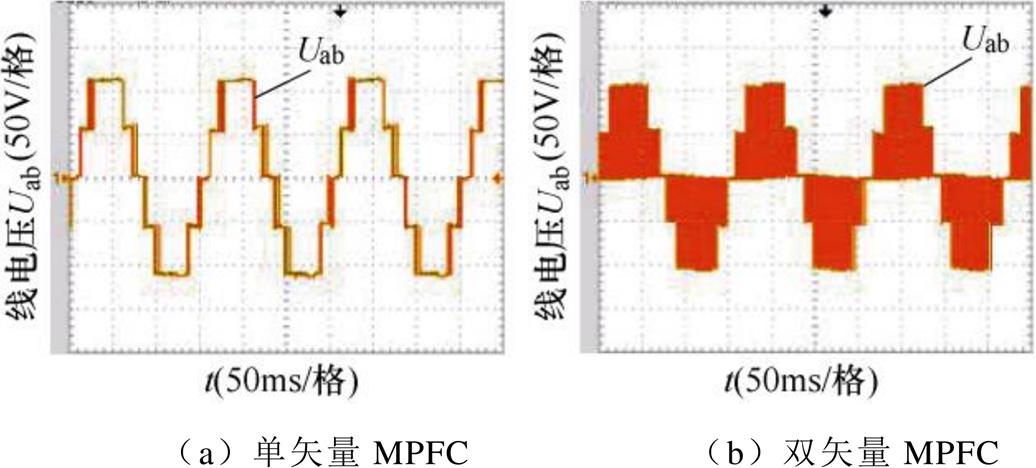
图14 NPC三电平线电压特性实验波形
Fig.14 Experimental waveforms of line voltage in the NPC three-level inverter
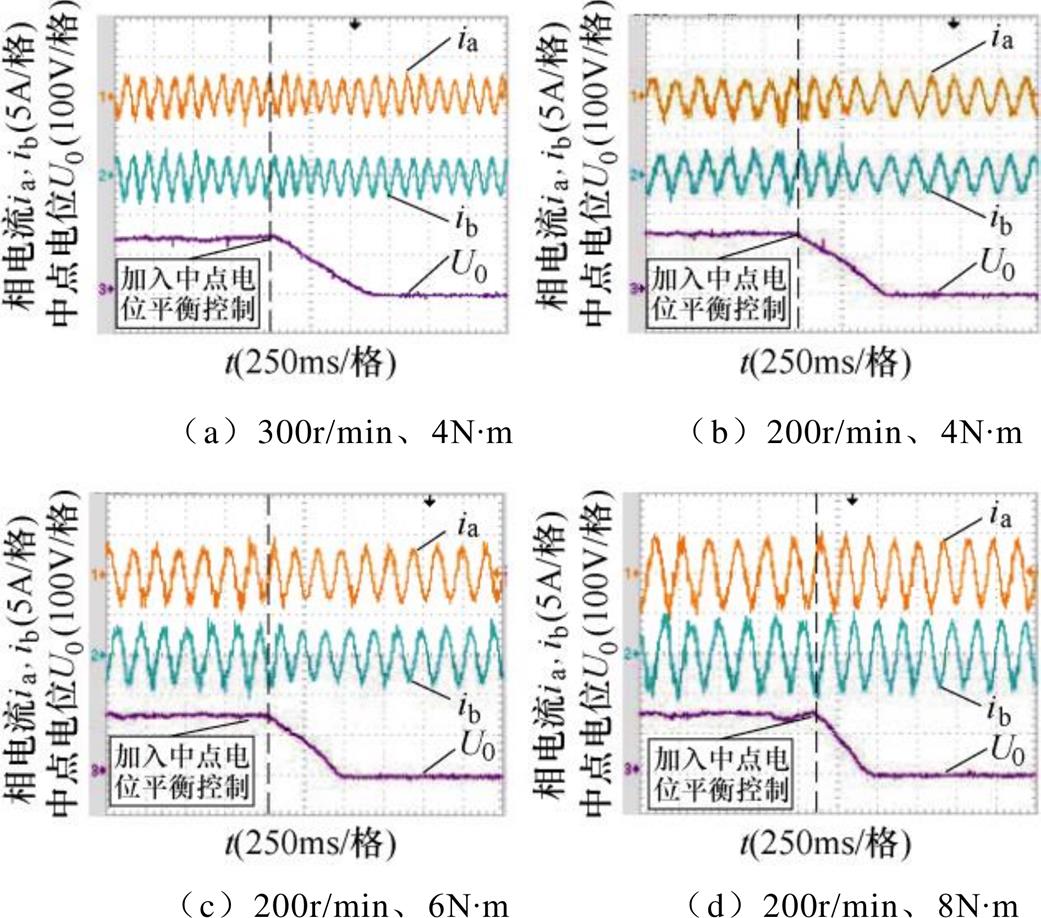
图15 双矢量MPFC下中点电位平衡实验波形
Fig.15 Experimental waveforms of neutral voltage balance with double-vector MPFC
为了进一步比较单矢量MPFC和本文所提出的双矢量MPFC的稳态性能,对于这两种控制策略,给定转速200r/min,给定负载6N·m,进行实验验证。通过对图16a单矢量MPFC和图16b双矢量MPFC比较可以看出,双矢量MPFC的转矩脉动更小,电流正弦度更好。
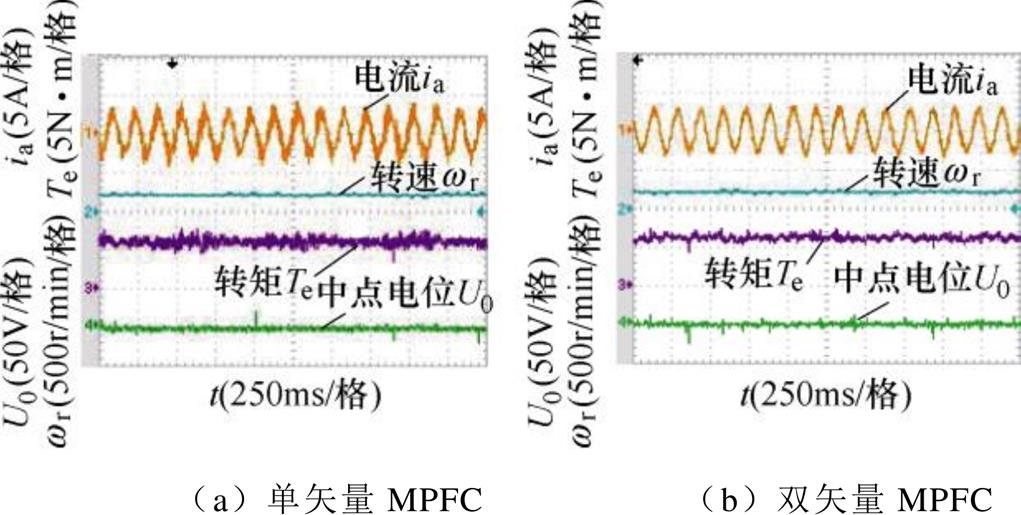
图16 单双矢量稳态性能分析
Fig.16 Steady-state performance evaluation of single and dual vectors
为了对两种控制方案的动态性能进行分析,在图17中,给定转速200r/mim,初始负载4N·m,运行一段时间后负载突变到6N·m,对于图17a单矢量MPFC和图17b双矢量MPFC两种控制策略,转矩均在0.5s内过渡到6N·m,响应速度较快,转速基本保持不变,中点电位也很好地抑制在0V附近。在图18中,给定负载6N·m,初始转速200r/min,运行一段时间后转速突变到400r/min,此时图18a和图18b两种控制策略下的转速均在150ms内达到400r/min,响应比较迅速,转速基本无超调,在转速突变时转矩尖峰较小,动态性能良好。
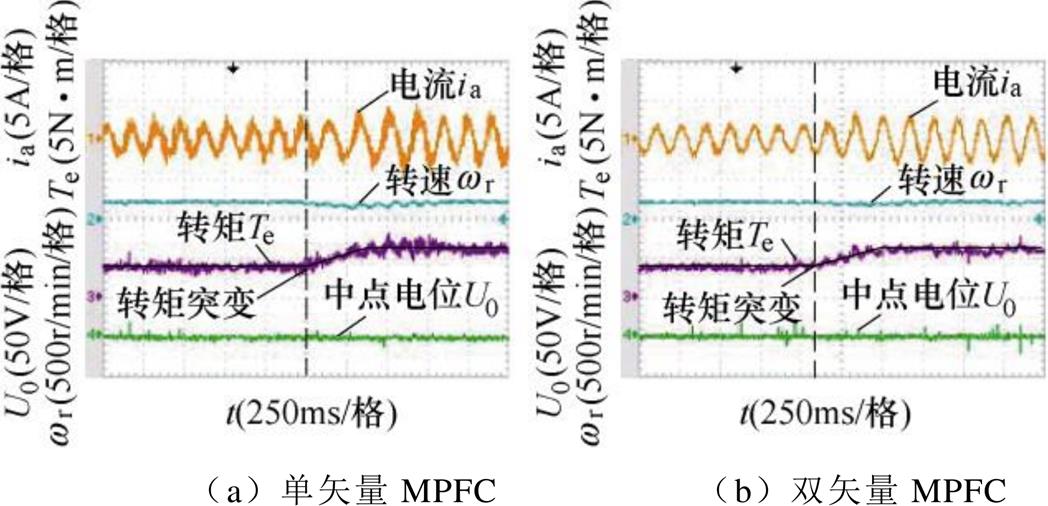
图17 转矩突变条件下实验性能分析
Fig.17 Experimental performance evaluation during torque step-change
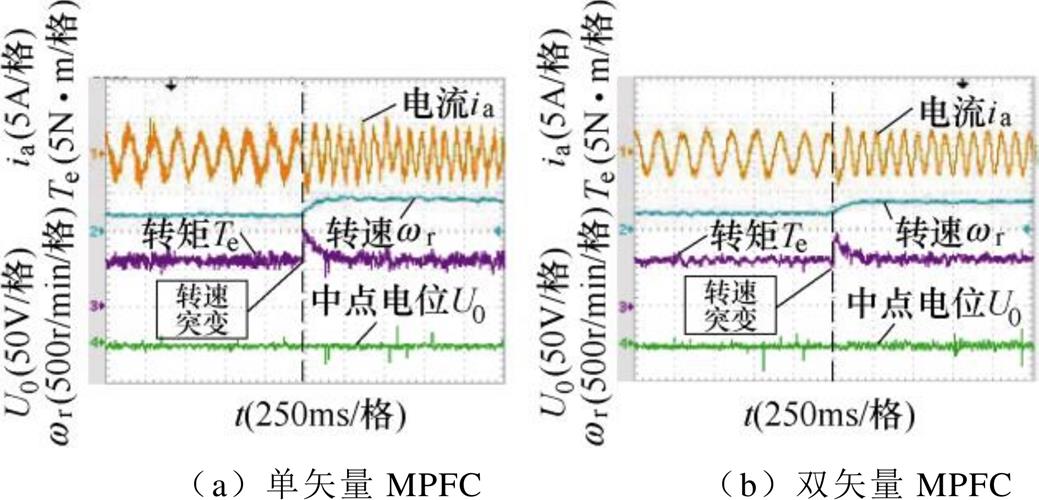
图18 转速突变条件下实验性能分析
Fig.18 Experimental performance evaluation during speed step-change
为了减小系统的运算负担,提高系统的稳态性能,本文提出了一种基于新型矢量分区的PMSM三电平双矢量MPFC算法。首先,建立PMSM的数学模型,然后利用MPFC构建无权重系数的磁链复矢量价值函数。进一步,为减小多矢量选优时的计算量,通过引入虚拟斜率的分扇区方法将备选矢量由27个减少到1~3个。同时,利用正负冗余小矢量对中点电位作用效果相反的特性来平衡中点电位。然后,为减小转矩脉动建立占空比优化准则,进而获得双非零矢量控制效果的同时降低了引入双非零矢量的计算负担。最后通过仿真和实验验证了该控制策略的有效性。
参考文献
[1] Huang Wentao, Hua Wei, Yin Fangbo, et al. Model predictive thrust force control of a linear flux- switching permanent magnet machine with voltage vectors selection and synthesis[J]. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4956-4967.
[2] Xiao Meng, Shi Tingna, Yan Yan, et al. Predictive torque control of permanent magnet synchronous motors using flux vector[J]. IEEE Transactions on Industry Applications, 2018, 54(5): 4437-4446.
[3] 於锋, 程明, 花为, 等. 基于NPC三电平九相磁通切换永磁电机的控制[J]. 电机与控制学报, 2017, 21(2): 18-26.
Yu Feng, Cheng Ming, Hua Wei, et al. Control of nine-phase flux-switching permanent magnet motor supplied by three-level NPC inverter[J]. Electric Machines and Control, 2017, 21(2): 18-26.
[4] 黄文涛, 花为, 於锋. 考虑定位力矩补偿的磁通切换永磁电机模型预测转矩控制方法[J]. 电工技术学报, 2017, 32(15): 27-33.
Huang Wentao, Hua Wei, Yu Feng. A model predictive torque control scheme for flux-switching permanent magnet machines with cogging torque compensation[J]. Transactions of China Electro- technical Society, 2017, 32(15): 27-33.
[5] Kakosimos P, Abu-Rub H. Deadbeat predictive control for PMSM drives with 3-L NPC inverter accounting for saturation effects[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2018, 6(4): 1671-1680.
[6] 柳志飞, 杜贵平, 杜发达. 有限集模型预测控制在电力电子系统中的研究现状和发展趋势[J]. 电工技术学报, 2017, 32(22): 58-69.
Liu Zhifei, Du Guiping, Du Fada. Research status and development trend of finite control set model predictive control in power electronics[J]. Transactions of China Electrotechnical Society, 2017, 32(22): 58-69.
[7] Zhang Xiaoguang, Hou Benshuai. Double vectors model predictive torque control without weighting factor based on voltage tracking error[J]. IEEE Transa- ctions on Power Electronics, 2018, 33(3): 2368-2380.
[8] 田朱杰, 吴晓新, 於锋, 等. 计及开关频率优化的永磁同步电机模型预测转矩控制[J]. 电机与控制应用, 2018, 45(11): 21-27.
Tian Zhujie, Wu Xiaoxin, Yu Feng, et al. Model predictive torque control for permanent magnet synchronous motor with switching frequency optimization[J]. Electric Machines Control Appli- cation, 2018, 45(11): 21-27.
[9] Habibullah M, Lu D D, Xiao Dan, et al. Low complexity predictive torque control strategies for a three-level inverter driven induction motor[J]. IET Electric Power Applications, 2017, 11(5): 776-783.
[10] 牛峰, 韩振铎, 黄晓艳, 等. 永磁同步电机模型预测磁链控制[J]. 电机与控制学报, 2019, 23(3): 34-41.
Niu Feng, Han Zhenduo, Huang Xiaoyan, et al. Model predictive flux control for permanent magnet synchronous motor[J]. Electric Machines and Control, 2019, 23(3): 34-41.
[11] 徐艳平, 李园园, 张保程, 等. 一种消除权重系数三矢量模型预测转矩控制[J]. 电工技术学报, 2018, 33(16): 3925-3934.
Xu Yanping, Li Yuanyuan, Zhang Baocheng, et al. Three-vector based model predictive torque control of eliminating weighting factor[J]. Transactions of China Electrotechnical Society, 2018, 33(16): 3925-3934.
[12] 谷鑫, 刘潮, 张国政, 等. 三电平逆变器同步不连续空间矢量调制输出电流优化策略[J]. 电工技术学报, 2019, 34(5): 924-933.
Gu Xin, Liu Chao, Zhang Guozheng, et al. Space- vector based synchronous discontinuous PWM for three-level inverter with output current optimi- zation[J]. Transactions of China Electrotechnical Society, 2019, 34(5): 924-933.
[13] 姜卫东, 李劲松, 王金平, 等. 一种新型N相中点钳位型三电平逆变器的PWM策略[J]. 电工技术学报, 2019, 34(10): 2194-2206.
Jiang Weidong, Li Jinsong, Wang Jinping, et al. A novel PWM strategy for neutral point clamped N- phase three-level inverter[J]. Transactions of China Electrotechnical Society, 2019, 34(10): 2194-2206.
[14] 林宏民, 吴晓新, 乐胜康, 等. 基于三电平优化矢量的异步电机模型预测直接转矩控制[J]. 电机与控制学报, 2018, 22(8): 65-74.
Lin Hongmin, Wu Xiaoxin, Le Shengkang, et al. Model predictive direct torque control of induction motor based on three level optimization vector[J]. Electric Machines and Control, 2018, 22(8): 65-74.
[15] Habibullah M, Lu D D, Xiao Dan, et al. Predictive torque control of induction motor sensorless drive fed by a 3L-NPC inverter[J]. IEEE Transactions on Industrial Informatics, 2017, 13(1): 60-70.
[16] Habibullah M, Lu D D, Xiao Dan, et al. Selected prediction vectors based FS-PTC for 3L-NPC inverter fed motor drives[J]. IEEE Transactions on Industry Applications, 2017, 53(4): 3588-3597.
[17] Zhang Yongchang, Bai Yuning, Yang Haitao, et al. Low switching frequency model predictive control of three-level inverter-fed IM drives with speed- sensorless and field-weakening operations[J]. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4262-4272.
[18] Wu Xuesong, Song Wensheng, Xue Cheng. Low- complexity model predictive torque control method without weighting factor for five-phase PMSM based on hysteresis comparators[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2018, 6(4): 1650-1661.
[19] Zhang Yongchang, Yang Haitao. Model predictive torque control of induction motor drives with optimal duty cycle control[J]. IEEE Transactions on Power Electronics, 2014, 29(12): 6593-6603.
[20] 徐艳平, 张保程, 周钦. 永磁同步电机双矢量模型预测电流控制[J]. 电工技术学报, 2017, 32(20): 222-230.
Xu Yanping, Zhang Baocheng, Zhou Qin. Two-vector based model predictive current control for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2017, 32(20): 222-230.
[21] Zhang Yongchang, Yang Haitao. Two-vector-based model predictive torque control without weighting factors for induction motor drives[J]. IEEE Transa- ctions on Power Electronics, 2016, 31(2): 1381-1390.
[22] 宋文祥, 乐胜康, 吴晓新, 等. 一种改进的异步电机模型预测直接转矩控制方法[J]. 上海大学学报:自然科学版, 2018, 24(6): 861-876.
Song Wenxiang, Le Shengkang, Wu Xiaoxin, et al. Improved model predictive direct torque control for asynchronous machine[J]. Journal of Shanghai University: Natural Science, 2018, 24(6): 861-876.
Two-Vector-Based Model Predictive Flux Control of Three-Level Based Permanent Magnet Synchronous Motor with Sector Subregion
Abstract A new model predictive flux control scheme with two-vector is proposed in a manner where a novel vector subregion is adopted. The proposed control scheme can improve the steady-state control performance of permanent magnet synchronous motor (PMSM) supplied by a three-level inverter, and reduce the computation burden. Firstly, the control of electromagnetic torque and flux is transformed into the control of single stator flux vector, and thus the weighting factor in traditional predictive torque control can be eliminated. Secondly, the influence of basic voltage vectors in different sectors on system operation is analyzed in depth, and the number of alternative vectors is reduced to 1-3 in terms of virtual slope. Meanwhile, to reduce the torque ripple, the optimization criterion of duty cycle is established, and the control performance of double non-zero vector is further obtained. Finally, the simulation and experimental results show the effectiveness of the proposed control strategy.
keywords:Permanent magnet synchronous motor, three-level, model predictive flux control, virtual slope, torque ripple, duty cycle
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.190520
於 锋 男,1985年生,博士,副教授,研究方向为永磁电机变频调速控制及电力电子技术在电动汽车中的应用。E-mail: yufeng628@ntu.edu.cn
吴晓新 男,1978年生,博士,副教授,研究方向为电力电子与电力传动。E-mail: wu.xx@ntu.edu.cn(通信作者)
收稿日期2019-05-06
改稿日期 2019-08-06
国家自然科学基金资助项目(51807098)。
(编辑 赵 鹏)