Tab.1 Main parameters of the SPMSM

参数数值 额定功率/kW50 额定电压/V380 额定转速/(r/min)1 500 定子槽数/转子极数48/4 定子外径/mm368 定子内径/mm245 铁心长度/mm245 气隙长度/mm1.5 磁钢厚度/mm5
摘要 船舶用永磁同步电机的电磁振动水平直接影响船舶的综合性能。该文针对一台50kW船舶用表贴式永磁同步电机,首先基于理论推导详细分析了该电机产生的电磁激振力来源及谐波特征,并利用有限元法进行了验证;其次,分别采用解析法和有限元法求解定子固有频率,并结合电磁激振力的频率特征,验证电机设计的合理性;然后,建立电机的磁-固耦合模型,对其振动响应进行有限元计算,得到监测点的振动频响特性及特征频率;最后,在保持原电机输出平均转矩的前提下,提出一种混合磁极转子结构来削弱低阶电磁激振力谐波分量进而抑制电磁振动。结果表明,优化后的电机在保持良好转矩性能的同时,电磁振动得到了有效抑制,并通过样机实验验证了仿真结果的有效性。
关键词:表贴式永磁电机 电磁激振力 电磁振动 混合磁极 有限元法
电机作为船舶重要动力组成部分,大量应用于风机、泵机、发电设备及推进装置中[1-2]。电机在旋转的同时必然会引起机械结构的振动,影响电机稳定运行。同时,由振动引起的噪声也会导致船员反应速度下降,严重情况下还可能引起神经系统疾病发生,因此,大部分造船厂对电机振动等级都有很高要求,往往将振动性能与电气性能作为同等级评判标准[3]。永磁同步电机因具有高功率密度、运行可靠等优点,被广泛应用于船舶驱动领域[4-6],但是一台设计不良的永磁同步电机却可能存在严重的振动噪声问题。永磁同步电机的噪声辐射与电磁振动之间存在很强的关联性[7],研究永磁同步电机电磁振动及其激振源的相关问题对于提高船舶用电机综合性能和产品竞争力具有重要现实意义。表贴式永磁同步电机的永磁体安装在转子铁心圆周表面,隐极结构有利于降低其磁场谐波。同时,表贴式永磁同步电机较低的转矩脉动确保了电机的稳定运行,并且由于其结构简单、便于维护,此类电机在船舶驱动领域的应用更为广泛[8]。
电磁振动主要由作用在电机定子结构上的电磁激振力波动引起,在如何抑制永磁同步电机电磁激振力和电磁振动的方法上,国内外做了很多研究,主要可以分为两大类:一类是对电机控制策略进行优化[9-12];另一类是优化电机本体结构,即通过调整电机定、转子结构或参数来抑制电磁激振力和电磁振动。在电机本体优化设计方面,文献[13]分析了四台不同极槽参数永磁电机的电磁激振力和电磁噪声特性,其研究结果表明,极槽配合是影响电机振动噪声的重要因素,在设计电机时需要合理地选择极槽参数。文献[14]通过推理计算得出永磁电机电磁激振力的非零最小阶数为定子槽数和极数的最大公约数,并且低阶力波会在电机内引起较大振动,因此分数槽永磁电机振动水平相比于传统整数槽电机更高。文献[15]根据电磁激振力空间分布规律,提出一种定子齿顶偏移结构来削弱电磁振动,并利用有限元法验证了优化后电机的性能提升,文献[16]采用了定子齿削角方法,同样取得了有益效果。文献[17]针对一台12极36槽内置式永磁电机,首先改变转子磁极表面形状,使气隙长度满足反余弦函数,其次在转子q轴开凹槽,使转子磁场更具正弦化,采取这些措施后,电机表面振动速度降低了约12dB。文献[18]对比分析了辅助槽个数及形状对电机电磁激振力的影响,其研究结果表明在定子上开辅助槽可以有效抑制电磁激振力。文献[19]提出不同极弧系数组合的磁极结构可以有效削弱永磁同步电机的电磁振动。为了抑制表贴式永磁电机的极频振动,文献[20]提出在电机转子原主磁极之间安装极性交错的永磁体以填充电磁激振力波谷,进而减小振动,最后通过两台6极36槽样机的实验证明了该方法的有效性。提高电机结构刚度也可以改善电机振动性能,文献[21]通过增大电机轭厚和增加定子齿根倒角提高了电机固有频率,避免了共振发生。文献[22]探究了一系列能够降低永磁同步电机电磁激振力的方法,并通过计算发现,减小定子槽宽、采用定子斜槽、调整极弧系数和磁极分段等方法均可改善电机电磁激振力特性。
综上所述,目前针对永磁同步电机电磁振动抑制方法的研究颇多,然而一些减振方法会同时带来电机输出转矩的降低或者制造复杂性的提高。本文针对一台50kW船舶用表贴式永磁同步电机,通过解析计算和有限元法分析电机电磁激振力的空间阶数和频率特征,并在保持电机原输出平均转矩的基础上提出一种混合磁极转子结构来抑制其电磁激振力及电磁振动。通过对比分析优化前后电机电磁性能和振动特性变化,验证优化后结构对电机的振动削弱效果,并通过实验验证了仿真结果的有效性。
本文研究的船舶用永磁同步电机的主要参数见表1。该电机是一台内转子表贴式永磁同步电机,其中电枢绕组为双层结构的短距分布绕组,转子每极由两块相同形状和体积的钕铁硼永磁体组成,其牌号为N-35,样机的二维电磁结构如图1所示。
表1 永磁同步电机主要参数
Tab.1 Main parameters of the SPMSM
参数数值 额定功率/kW50 额定电压/V380 额定转速/(r/min)1 500 定子槽数/转子极数48/4 定子外径/mm368 定子内径/mm245 铁心长度/mm245 气隙长度/mm1.5 磁钢厚度/mm5
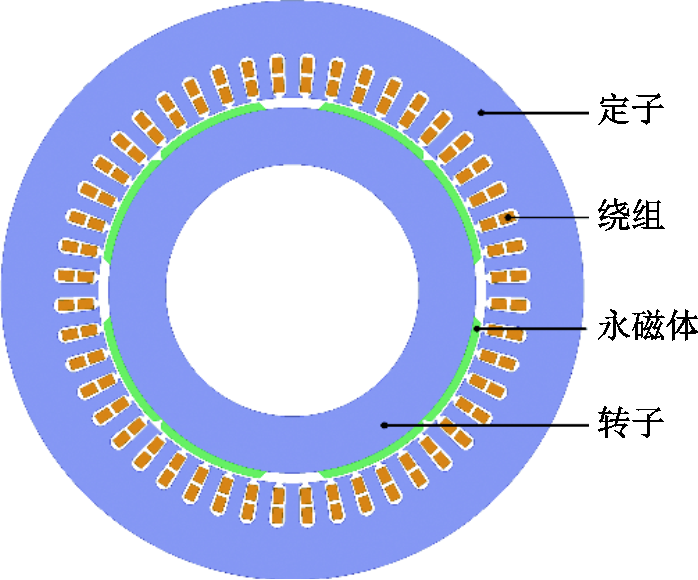
图1 电机二维电磁结构
Fig.1 2-D electromagnetic structure of the SPMSM
电磁激振力由气隙磁场产生,由麦克斯韦应力张量法可以得到电机气隙磁通密度和电磁激振力之间的关系。气隙磁通密度可表示为磁动势函数与气隙磁导函数的乘积,而负载工况下的气隙磁通密度 由永磁磁场Bmag和电枢磁场Barm共同作用产生,如式(1)所示。
由永磁磁场Bmag和电枢磁场Barm共同作用产生,如式(1)所示。
 (1)
(1)
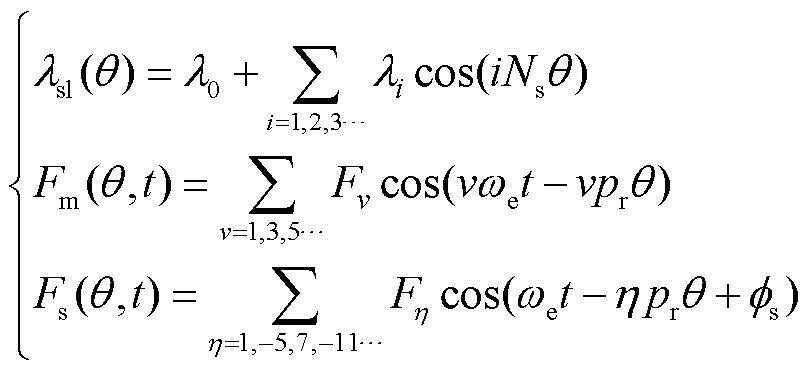
式中,λsl、Fm、Fs分别为气隙磁导、永磁磁动势以及定子电枢磁动势;θ为圆周位置角;t为时间。内转子表贴式永磁同步电机的气隙磁导、永磁磁动势及理想三相正弦电流供电下的电枢磁动势分别表示为[23]
 (2)
(2)
式中,λ0、λi分别为气隙磁导的直流分量幅值和i次谐波分量幅值;Fv、Fη分别为永磁磁动势v次谐波分量幅值及电枢磁动势η次谐波分量幅值;Ns为定子槽数;ωe为电机的电角频率;pr为电机极对数; 为电枢磁动势初始相位。
为电枢磁动势初始相位。
将式(2)代入式(1)可以得到电机气隙磁通密度的详细表达式为

气隙磁通密度的各谐波分量见表2。表2中显示的气隙磁通密度幅值均省略了求和符号,fe为电机基波电频率。
表2 气隙磁通密度谐波分布
Tab.2 Harmonic distribution of air gap magnetic density

来 源幅 值频 率空间阶数 永磁体λ0Fvvfevpr 永磁体&开槽λiFv/2vfevpr±iNs 电枢绕组λ0Fηfeηpr 电枢绕组&开槽λiFη/2feηpr±iNs
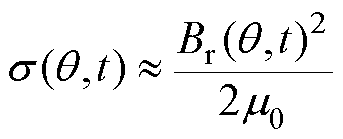
忽略幅值较低的切向气隙磁通密度,根据麦克斯韦应力方程可以得到电机电磁振动的主要激振源径向电磁激振力密度的近似表达式为[24]
 (4)
(4)
式中,μ0为真空磁导率,其值为4π×10-7H/m。
将式(3)代入式(4),可以得到电磁激振力密度的详细表达式,通过归纳整理可以发现表达式中的各项均可表示为
 (5)
(5)
式中,sm为幅值;x为电磁激振力谐波的频率相对于基波电频率fe的倍数,即时间谐波次数;y为谐波的空间阶数; 为谐波的相位。
为谐波的相位。
电磁激振力各分量的来源、幅值、频率及空间阶数见表3。表3中显示的电磁力激振力幅值亦省略了求和符号。
表3 电磁激振力谐波分布
Tab.3 Harmonic distribution of electromagnetic force

来源幅值频率空间阶数 Ⅰ.永磁体λ02Fv1Fv2/(4μ0)(v1±v2)fe(v1±v2)pr Ⅱ.永磁体&开槽λi1λi2Fv1Fv2/(16μ0)(v1±v2)fe(v1±v2)pr±iNs λ0λiFv1Fv2/(4μ0) Ⅲ.电枢绕组λ02Fη1Fη2/(4μ0)2fe, 0(η1±η2)pr Ⅳ.电枢绕组&开槽λi1λi2Fη1Fη2/(16μ0)2fe, 0(η1±η2)pr±iNs λ0λiFη1Fη2/(4μ0) Ⅴ.永磁体&电枢绕组λ02FvFη/(2μ0)(v±1)fe(v±η)pr Ⅵ.永磁体&电枢绕组&开槽λ0λiFvFη/(2μ0)(v±1)fe(v±η)pr±iNs Λi1Λi2FvFη/(8μ0)
表3中Ⅰ和Ⅱ组为永磁磁场产生的电磁激振力,Ⅲ和Ⅳ组为电枢磁场产生的电磁激振力,Ⅴ和Ⅵ组为两者共同作用产生的电磁激振力。低阶力波是电机产生振动的主要影响因素,根据上述规律,可以得到本文研究的4极48槽电机的部分低阶电磁激振力谐波见表4~表6,表中数据均为“空间阶数/时间次数”的形式,仅有动态电磁力可以激励电机结构,频率为0的电磁激振力直流静态分量不会引起振动,因此表中并未将其列出。表中负号代表电磁激振力旋转方向与主磁极磁场旋转方向相反;带括号项为低阶磁动势谐波与气隙磁导低次谐波的作用结果;无括号项为低阶磁动势谐波与气隙磁导基波的作用结果。由表4~表6可知,电磁激振力空间阶数为4阶及其整数倍,时间谐波次数均为偶数。
表4 永磁磁场作用产生的电磁激振力
Tab.4 Low order electromagnetic force produced by permanent magnetic field
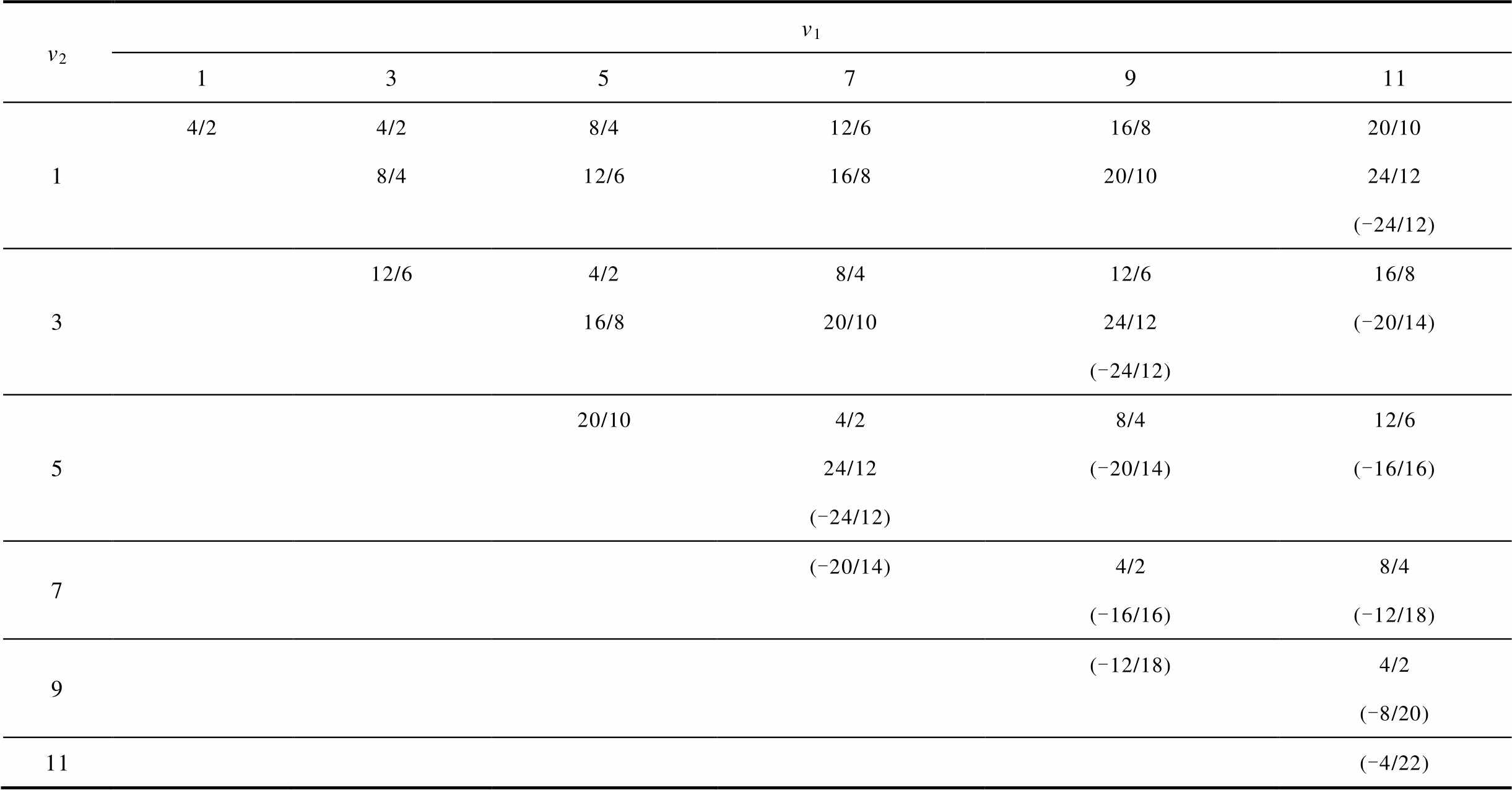
v2v1 1357911 14/24/28/48/412/612/616/816/820/1020/1024/12(-24/12) 312/64/216/88/420/1012/624/12(-24/12)16/8(-20/14) 520/104/224/12(-24/12)8/4(-20/14)12/6(-16/16) 7(-20/14)4/2(-16/16)8/4(-12/18) 9(-12/18)4/2(-8/20) 11(-4/22)
表5 电枢磁场作用产生的电磁激振力
Tab.5 Low order electromagnetic force produced by armature magnetic field
η2η1 1-57-1113-17 14/2-8/216/2-20/2(-20/2)16/2 -5-20/24/2(16/2)16/2(4/2) 7(-20/2)-8/2(-8/2)-20/2 -11(4/2)4/2(-8/2) 13(4/2)(-8/2) -17(-20/2)
表6 永磁磁场和电枢磁场共同作用产生的电磁激振力
Tab.6 Low order electromagnetic force produced by permanent magnetic field and armature magnetic field
ηv 1357911 14/24/28/48/412/612/616/816/820/1020/1024/12(-24/12) -5-8/216/2-4/420/40/624/6(-24/6)4/8(-20/8)8/10(-16/10)12/12 716/2-8/220/4-4/424/6(-24/6)0/6(-20/8)4/8(-16/10)8/10(-12/12) -11-20/2(-20/2)-16/4(-16/4)-12/6(-12/6)-8/8(-8/8)-4/10(-4/10)0/12 13(-20/-2)-20/2-16/4-16/4(-12/6)-12/6(-8/8)-8/8(-4/10)-4/10(0/12) -17(16/2)(-8/2)(20/4)(-4/4)-24/6(24/6)(0/6)-20/8(4/8)-16/10(8/10)-12/12
根据表1和图1中电机电磁结构参数建立其电磁场有限元分析模型。空载工况时赋予电枢绕组零电流激励;负载工况时采用id=0控制,给电枢绕组通入三相对称电流源。电机达到稳态后空载和负载径向气隙磁通密度空间分布如图2所示,由于电枢反应的影响,负载径向气隙磁通密度不再是梯形波分布,而是发生了倾斜。为了得到径向气隙磁通密度谐波分布情况,对数据进行快速傅里叶分解如图3所示,可以看出径向气隙磁通密度的2阶分量(基波)占主要成分,该分量在空载和负载下的幅值分别为0.891T、0.936T,其次,6阶和18阶分量的幅值也相对较大。
图2 径向气隙磁通密度分布
Fig.2 Distribution of the radial air gap magnetic density
图3 径向气隙磁通密度谐波分布
Fig.3 Harmonic distribution of radial air gap magnetic density
电机空载和负载电磁激振力密度在一个电周期内随时间变化和一对极范围内随空间变化波形如图4所示,由于电枢反应引起的气隙磁通密度畸变,负载电磁激振力波形也跟随发生了倾斜。采用二维傅里叶变换对电磁激振力密度进行分解,得到空载和负载工况下阶次较低的电磁激振力谐波分量见表7和表8。表中数据的单位为kN/m2,为了减小误差的影响,表中只给出大于或等于0.20kN/m2的数据,数据前面“+”、“-”号表示电磁激振力相对于主磁极磁场的旋转方向。
由表7和表8中数据可知电磁激振力空间谐波和时间谐波特征与理论分析结果完全相符。将两种工况下低阶动态电磁激振力峰值进行对比,结果如图5所示。电磁激振力的最大值均出现在(4/2)谐波分量,负载电磁激振力各低阶峰值分量相较于空载均有所升高,其中(4/2)分量的幅值增幅最为明显。由于磁动势的基波幅值相对于其他分量较大,则对照表4可知空载工况下的电磁激振力(4/2)分量主要由永磁磁动势基波(v=1)产生,除此之外,(4/2)分量幅值较大的还有永磁磁动势基波(v=1)与3次谐波(v=3)相互作用;对照表5和表6可知负载工况新引入的(4/2)分量中幅值较大的有:电枢磁动势基波(η=1)作用、电枢磁动势基波(η=1)与永磁磁动势基波(v=1)作用、电枢磁动势基波(η=1)与永磁磁动势3次谐波(v=3)作用,这些新引入的分量使得最终负载工况下的电磁激振力(4/2)分量幅值相对于空载有明显增加。结合表2,(4/2)分量和气隙磁通密度谐波之间的关系见表9。由表9中数据可知,(4/2)分量主要由气隙磁通密度的2阶分量以及6阶分量相互作用产生。同理可类比分析出电磁激振力其他谐波的成因。

图4 电磁激振力密度三维波形
Fig.4 3-D waveforms of the electromagnetic force density
表7 空载工况下的电磁激振力(单位:kN/m2)
Tab.7 Electromagnetic force of no-load condition
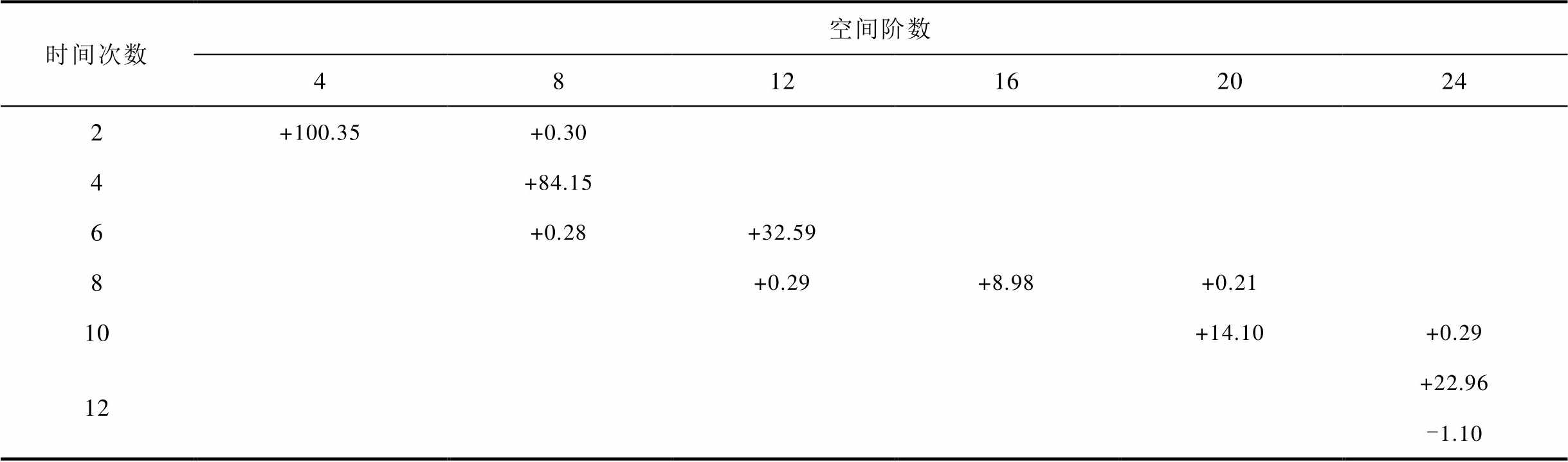
时间次数空间阶数 4812162024 2+100.35+0.30 4+84.15 6+0.28+32.59 8+0.29+8.98+0.21 10+14.10+0.29 12+22.96 -1.10
表8 负载工况下的电磁激振力(单位:kN/m2)
Tab.8 Electromagnetic force of rated condition
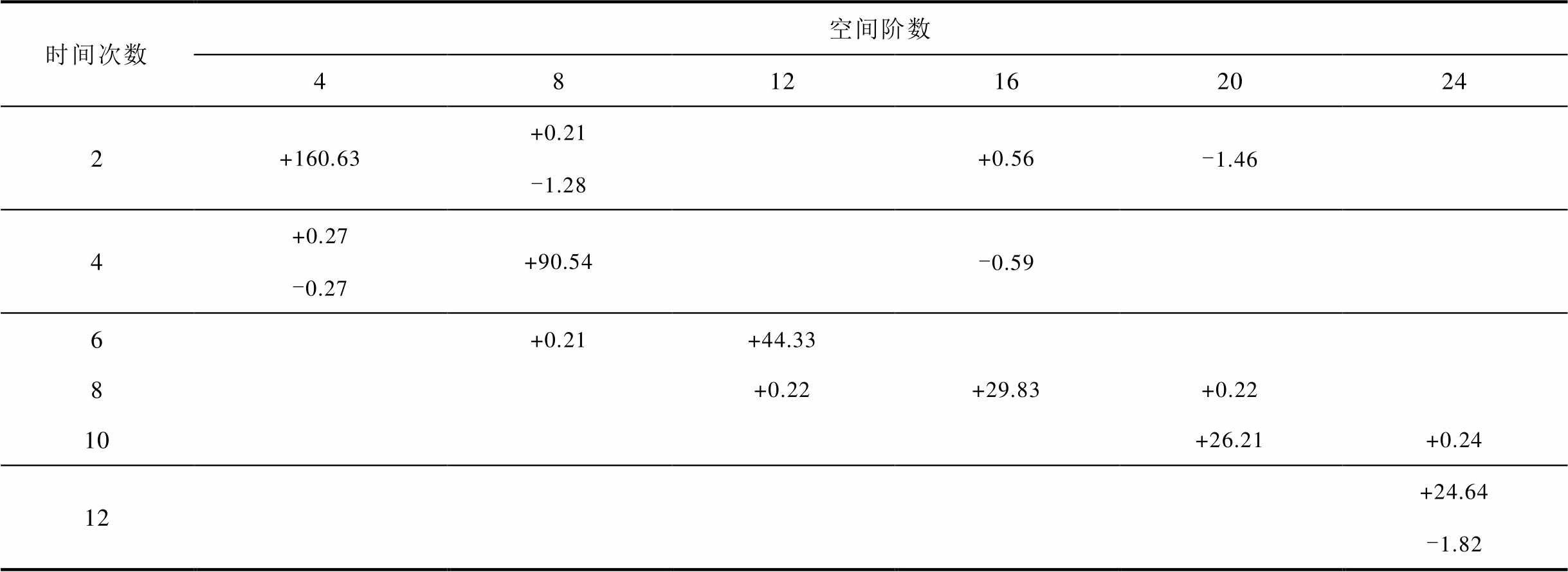
时间次数空间阶数 4812162024 2+160.63+0.21+0.56-1.46 -1.28 4+0.27+90.54-0.59 -0.27 6+0.21+44.33 8+0.22+29.83+0.22 10+26.21+0.24 12+24.64 -1.82
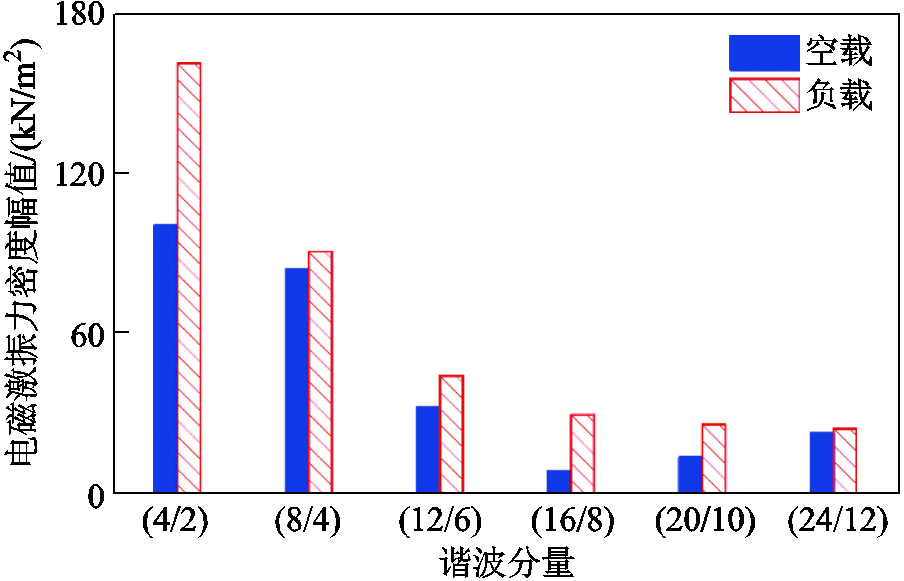
图5 低阶电磁激振力峰值
Fig.5 Peak electromagnetic force at each spatial order
表9 电磁激振力(4/2)谐波分量的主要来源
Tab.9 Main source of (4/2) harmonic component of electromagnetic force

来源磁动势谐波相互作用气隙磁通密度谐波相互作用 空载v2=v1=12阶 v2=1, v1=32阶, 6阶 负载η2=η1=12阶 η=1, v=12阶 η=1, v=32阶, 6阶
当电磁激振力频率和电机固有频率一致或者接近时,电机会因为共振而出现剧烈的振动现象,从而带来严重的后果,因此对电机进行模态分析是必不可少的。模态分析包括固有频率和模态振型的计算,一般有两种方法:解析法和有限元法。其中解析法进行了很多假设和简化,所以一般不适用于电机整机固有频率的求解,但如果将电机振动行为归因于定子,则可以采用圆环作为定子的简化模型进行分析,并且仍然具有较高准确性[25]。
本文研究的船舶用永磁同步电机定子铁心材料力学性能参数为:密度7 650kg/m3,杨氏模量193GPa,泊松比0.3。将定子铁心看作一个无限长的圆柱壳,那么n阶径向模态对应的固有频率fn为[26]
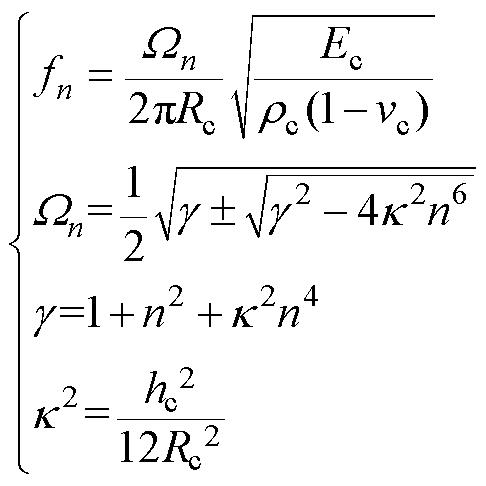 (6)
(6)
式中,Rc为定子的平均半径;Ec、ρc、vc分别为材料的杨氏模量、密度、泊松比;κ2为无量纲厚度参数;hc为定子轭厚。
将定子铁心的结构和材料参数代入式(6),可求得其部分低阶径向模态所对应的定子固有频率见表10。为了验证解析计算的准确性,对定子模态进行有限元分析。通过计算得到定子模态振型及其固有频率如图6所示,对比定子各低阶固有频率的解析计算和有限元分析结果可知二者误差较小。由模态分析得到的定子固有频率均与上文计算得到的电磁激振力频率相差较远,因此不会发生共振,电机设计合理。
表10 定子固有频率计算结果
Tab.10 Calculation results of stator natural frequency
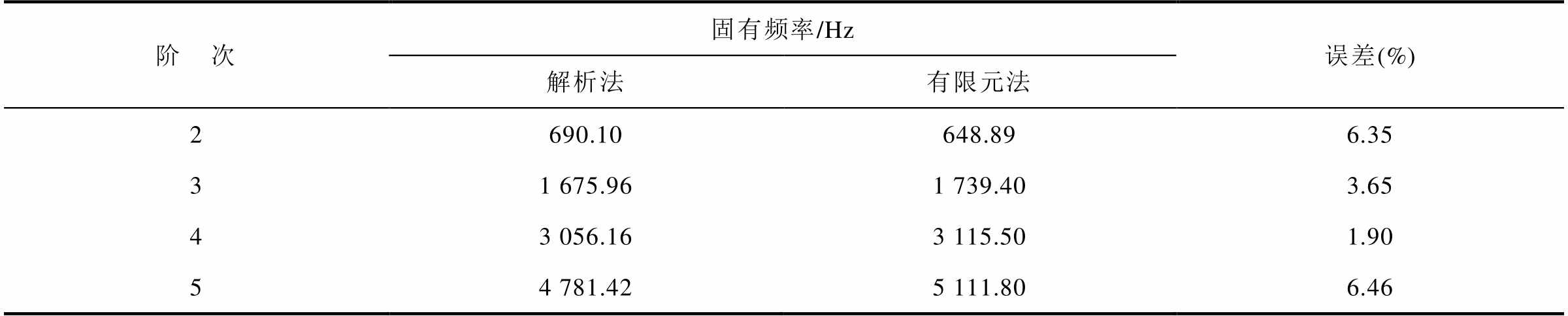
阶 次固有频率/Hz误差(%) 解析法有限元法 2690.10648.896.35 31 675.961 739.403.65 43 056.163 115.501.90 54 781.425 111.806.46
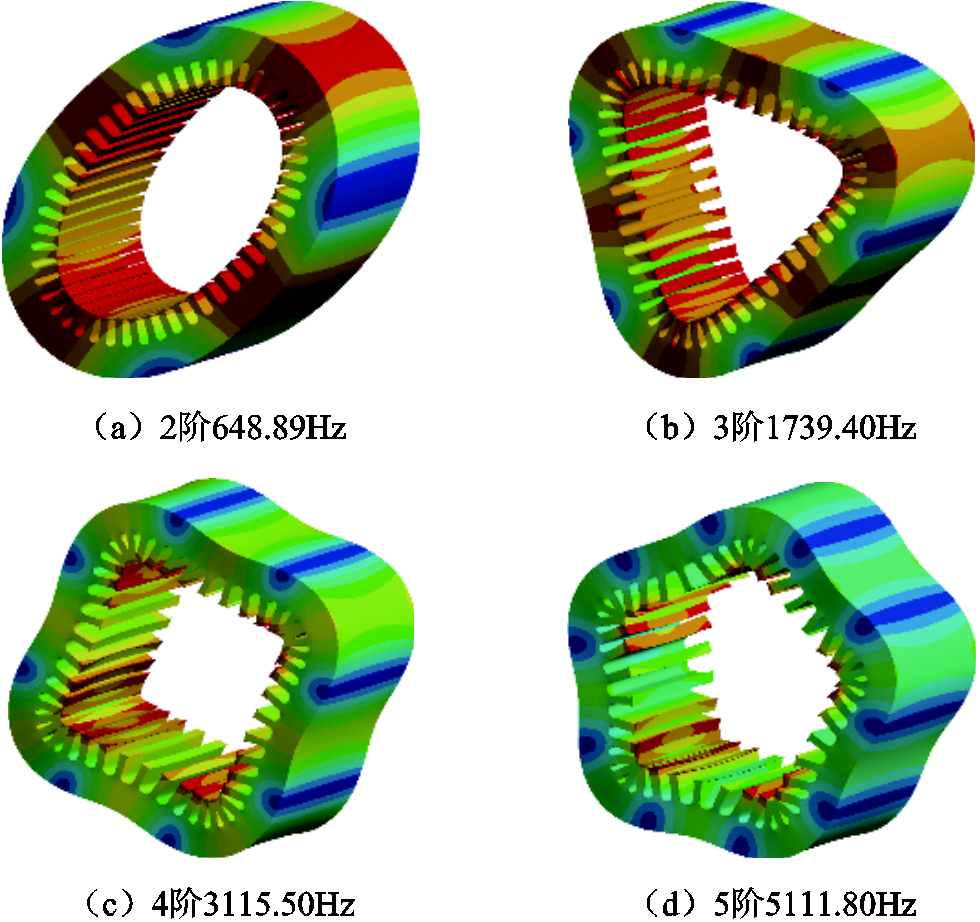
图6 电机定子低阶模态
Fig.6 Low order modes of motor stator
利用多物理场仿真平台谐响应分析模块,计算所研究的船舶用永磁同步电机在空载和负载工况下的振动特性。为了提高计算速率,在仿真模拟中采用集中力的方式将电磁激振力加载到每个定子齿上。电机在运行时机座底脚固定于工作台,因此底脚处需施加固定约束。电磁振动主要在径向,因此本文主要关注其径向振动特性。由于电磁激振力频率远离模态有限元计算得到的定子固有频率,因此振动峰值主要受到电磁激振力的影响。图7给出了空载和负载工况下机壳表面振动速度频谱的仿真结果比较,两种工况下振动速度峰值均出现在2fe处,对应前文分析得到的动态电磁激振力峰值频率。图8给出了在2fe处电机内部的定子形变情况,从图中可以明显看出此频率点的电机形变主要由4阶力波引起,由于负载电磁激振力的(4/2)分量幅值较空载有所增加,2fe点振动速度幅值亦有所上升。
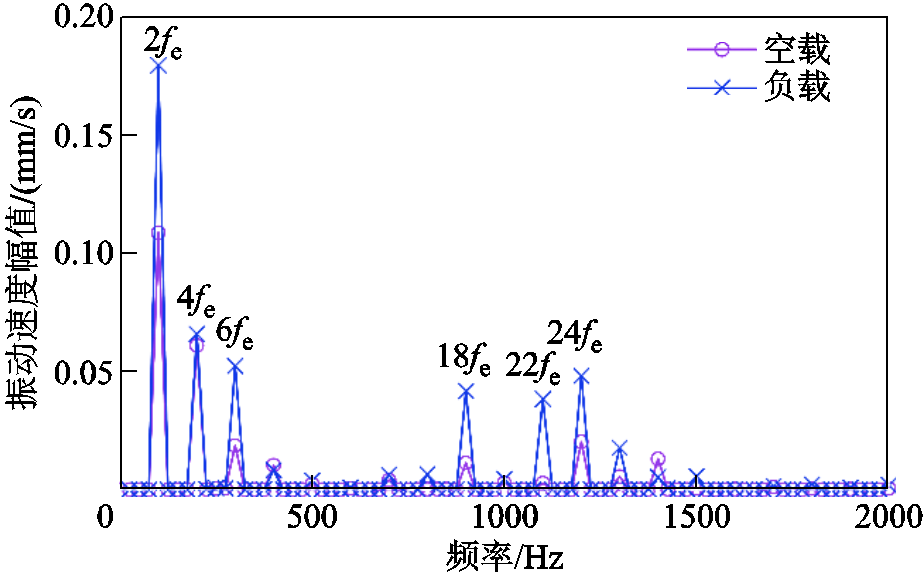
图7 电机振动速度频谱
Fig.7 Vibration velocity spectrum of the motor
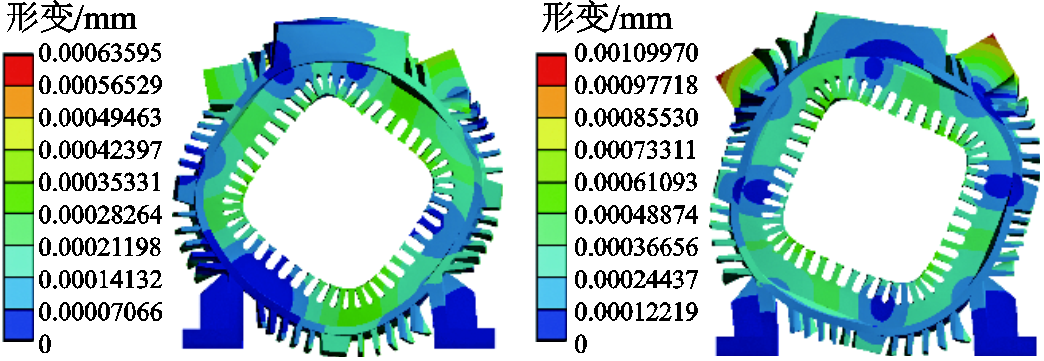
图8 定子形变情况
Fig.8 Deformation of the stator
为了验证有限元计算及磁-固耦合仿真方法的准确性和有效性,对电机的仿真结果进行实验验证。船舶用永磁同步电机电磁性能测试与振动特性测试的实验平台如图9所示,实验中采用LMS数据采集前端硬件和Simcenter Testlab数据分析软件进行数据采集和分析。

图9 样机测试平台
Fig.9 Prototype motor test platform
在对电机电磁性能测试过程中,气隙磁通密度难以测量,则可以通过测量空载反电动势来验证磁场计算的准确性。电机空载工况是将电机定子绕组开路,由一台异步电机拖动样机旋转。将运行于额定转速下A相与C相间的电机空载线反电动势Eac实验值与仿真值进行对比,结果如图10所示。其中Eac实验结果显示的数据为其实际值的绝对值,通过实验测定的Eac有效值为309.52V,通过有限元仿真得到的结果为304.41V,二者误差为1.65%,满足工程计算精度要求,从而验证了电磁有限元分析模型的准确性。

图10 空载线反电动势的仿真结果和实验结果
Fig.10 Simulation results and experimental results of no-load line back EMF
振动特性实验在电机空载工况下进行,测点选择在电机机壳中间正上方位置,实验采用压电式电荷型加速度传感器,加速度信号经过低噪声电缆和抗混叠滤波器传送至与计算机相连的多通道数据采集仪,并对采集到的加速度信号一次积分成速度。在仿真软件中选取相同位置的采样点,电机振动速度仿真结果与实测结果对比如图11所示,可以看出二者具有一定差距,这是因为电机振动实测结果不仅受到电磁激振力的作用,还与其机械结构、仪器的安装和固定等各种因素相关,但是其趋势基本一致,在2fe、4fe频率点处振动速度幅值较大,峰值速度均出现在2fe处,所以测试结果是可以接受的,进而验证了电机磁-固耦合方法有效性以及振动响应计算结果的准确性。通过理论分析、有限元计算以及实验测试可知本台电机的电磁激振力是其振动主要来源,并且电磁激振力(4/2)谐波分量在电机内引起了较大振动,若能采取措施降低此分量的幅值,电机振动性能应该可以得到相应改善。
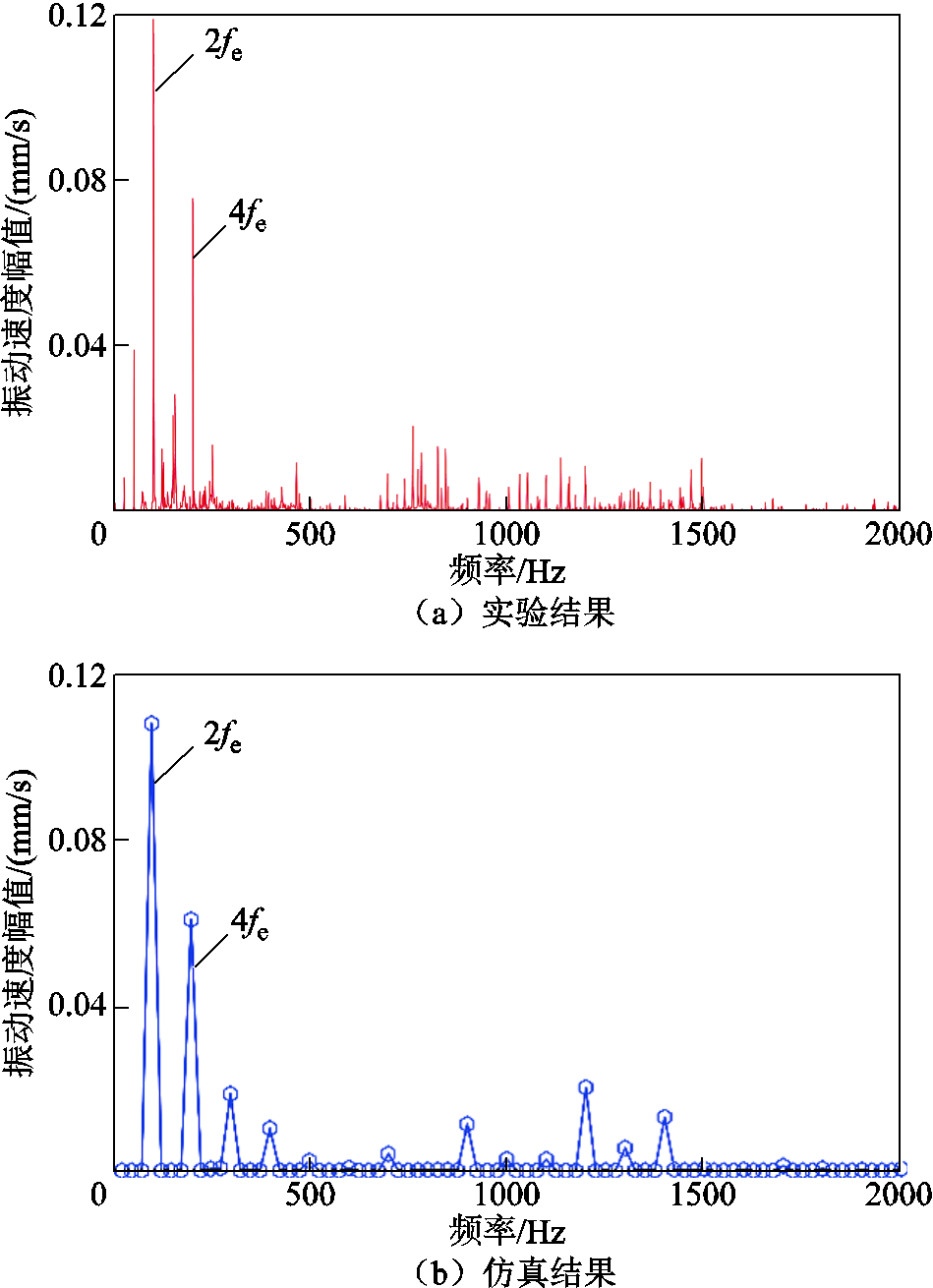
图11 空载振动速度的仿真结果和实验结果
Fig.11 Simulation results and experimental results of no-load vibration velocity
传统的永磁电机矢量控制方法包含id=0控制方式和最大转矩电流比控制两种,两者对于表贴式永磁同步电机而言是等效的[27-28]。id=0控制下电机工作方式如图12所示,在采用id=0控制时,定子电枢电流只有q轴分量,且定子电枢磁动势空间矢量与永磁磁场空间矢量正交,即 =90°。假设电机转子从右向左旋转,从图中可以看出电枢磁动势对转子磁极有两种影响:对于N极永磁体,电枢磁动势的方向与区域A中永磁体的磁化方向相同,此时会将转子“拉”到左侧;在区域B中,电枢磁动势的方向与永磁体磁化方向相反,此时会将转子“推”到左侧,因此电枢磁动势对整个磁极的作用是使其向左移动[29]。同理可类比分析出电枢磁动势对S极永磁体的作用效果。基于上述分析,可以在磁化方向与电枢磁动势方向相同的区域A中配置低矫顽力的永磁体、相反的区域B中配置较高矫顽力的永磁体,进而避免永磁体不可逆的退磁风险。同时,由上述分析还可得出电枢反应对气隙磁场的影响:使得转子磁极半边的磁场加强(区域A),另半边的磁场减弱(区域B),引起气隙磁通密度发生畸变,和前文图2所示的负载气隙磁通密度分布情况相符。若在区域A和区域B中分别配置低剩磁和高剩磁的永磁体,气隙磁通密度的畸变程度会有所减弱,气隙磁通密度的谐波幅值将发生变化,进而电磁激振力的谐波幅值也会随之受到影响。
=90°。假设电机转子从右向左旋转,从图中可以看出电枢磁动势对转子磁极有两种影响:对于N极永磁体,电枢磁动势的方向与区域A中永磁体的磁化方向相同,此时会将转子“拉”到左侧;在区域B中,电枢磁动势的方向与永磁体磁化方向相反,此时会将转子“推”到左侧,因此电枢磁动势对整个磁极的作用是使其向左移动[29]。同理可类比分析出电枢磁动势对S极永磁体的作用效果。基于上述分析,可以在磁化方向与电枢磁动势方向相同的区域A中配置低矫顽力的永磁体、相反的区域B中配置较高矫顽力的永磁体,进而避免永磁体不可逆的退磁风险。同时,由上述分析还可得出电枢反应对气隙磁场的影响:使得转子磁极半边的磁场加强(区域A),另半边的磁场减弱(区域B),引起气隙磁通密度发生畸变,和前文图2所示的负载气隙磁通密度分布情况相符。若在区域A和区域B中分别配置低剩磁和高剩磁的永磁体,气隙磁通密度的畸变程度会有所减弱,气隙磁通密度的谐波幅值将发生变化,进而电磁激振力的谐波幅值也会随之受到影响。
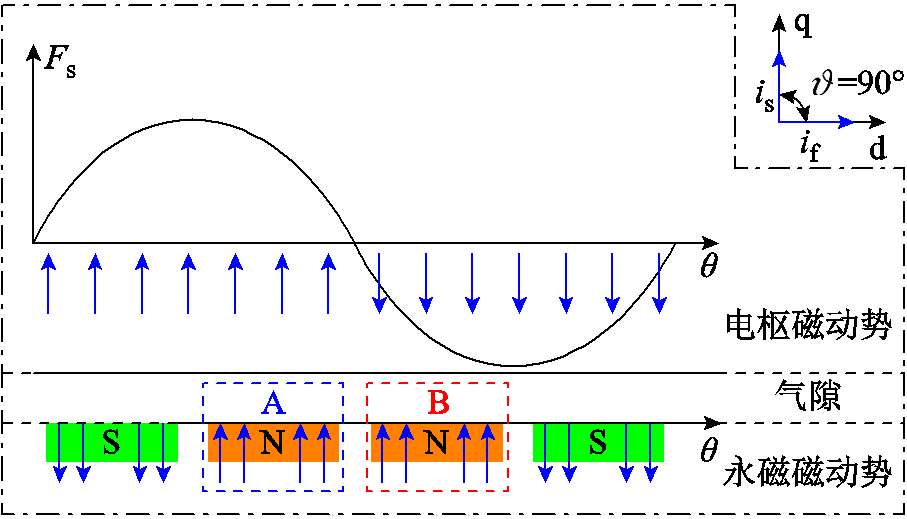
图12 id=0控制下电机工作方式
Fig.12 Operating conditions of motor under id=0 control
综合上述分析,在保持输出平均转矩与原电机相同的前提下,提出一种混合磁极转子结构,如图13所示。新结构下永磁体的总体积和原结构保持一致,转子每极由原来的两块相同牌号永磁体调整为由一块低矫顽力、低剩磁的永磁体a和一块高矫顽力、高剩磁的永磁体b共同组成,永磁体a安装在区域A,b安装在区域B。永磁体的材料及规格参数见表11,通过参数化扫描得到相同输出平均转矩下各方案的永磁体a、b所占角度α与β见表12。

图13 混合磁极转子结构
Fig.13 Hybrid pole rotor structure
表11 永磁体材料参数
Tab.11 Specifications of permanent magnets

牌号剩磁/T矫顽力/(kA/m) N-30≈1.08≈800 N-33≈1.13≈840 N-35≈1.18≈870 N-38≈1.22≈904 N-40≈1.26≈928
表12 转子磁极优化方案
Tab.12 Optimization schemes of hybrid pole rotor

方案永磁体a永磁体bα/(°)β/(°) 原结构N-35N-3536.536.5 方案一N-30N-3831.541.5 方案二N-30N-4037.135.9 方案三N-33N-3838.634.4 方案四N-33N-4046.426.6
建立新结构下的电机有限元仿真模型,计算各方案下径向气隙磁通密度在一对极范围内的空间分布如图14所示,相比于原结构,新结构下的径向气隙磁通密度在磁极段的畸变被削弱。对径向气隙磁通密度进行快速傅里叶变换分解得到其谐波分布如图15所示,与原结构相比,新结构下的径向气隙磁通密度2阶、6阶、10阶、18阶分量幅值均有不同程度下降,其中2阶分量的降幅并不明显,6阶分量在方案一取得最小值。
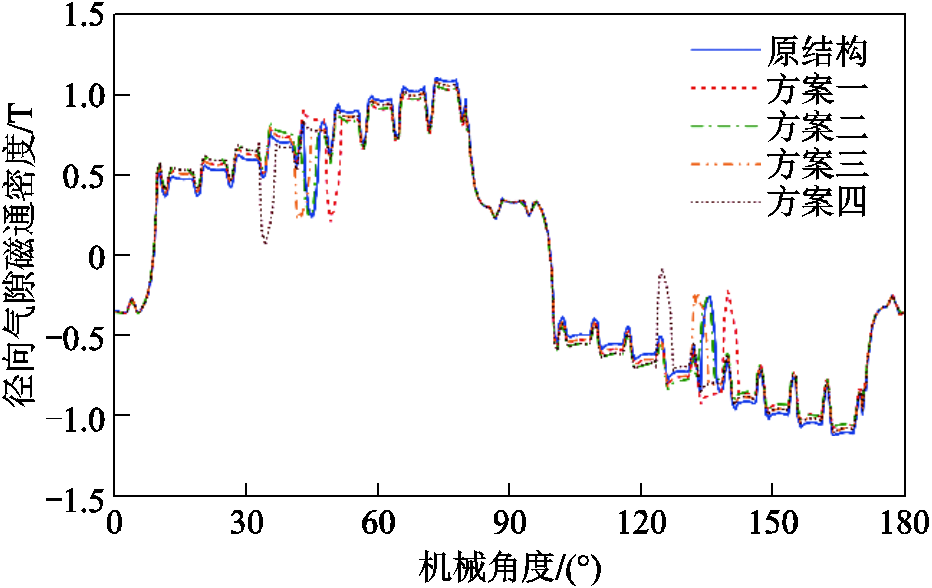
图14 径向气隙磁通密度对比
Fig.14 Comparison of the radial air gap magnetic density
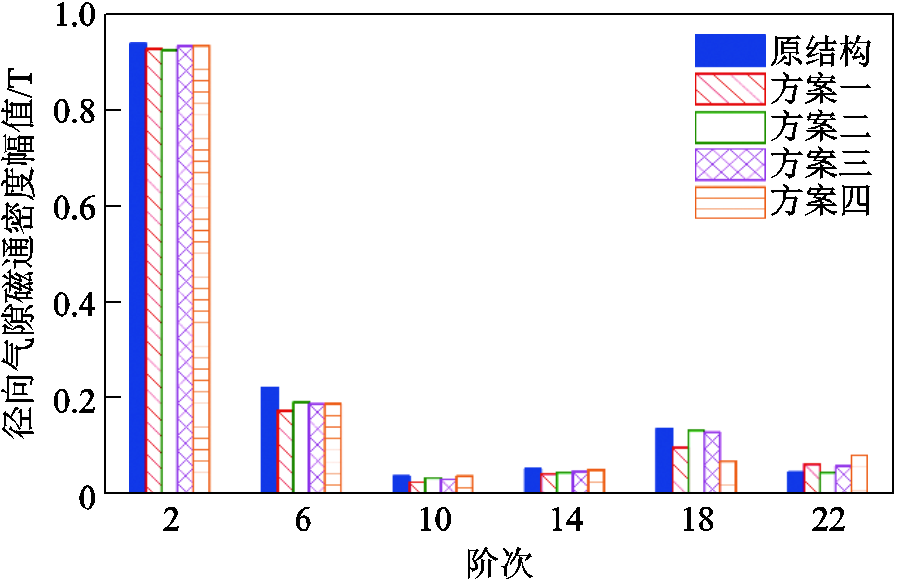
图15 径向气隙磁通密度谐波对比
Fig.15 Comparison of harmonic of radial air gap magnetic density
通过仿真得到各方案下电磁激振力密度时空分布,并对其进行二维傅里叶分解,将前三阶电磁激振力峰值进行对比如图16所示。在电磁激振力(4/2)分量中,新结构下的幅值均有不同程度下降,其中方案一取得最小值;在(8/4)分量中,方案一和方案四的降幅最为明显;对于(12/6)分量,方案二和方案三的幅值有所下降,方案一和方案四的幅值略微上升。电机振动时动态形变的振幅与电磁激振力空间阶数的4次方成反比,且从上文的分析可知电磁激振力(4/2)分量在电机中引起了较大振动,因此可得出方案一对于电磁激振力的抑制效果最佳。
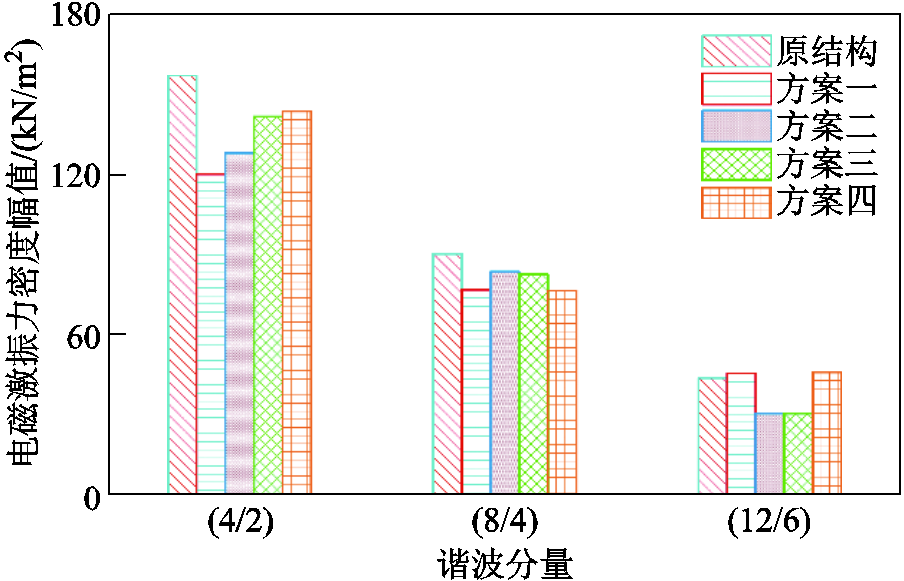
图16 电磁激振力峰值对比
Fig.16 Comparison of peak electromagnetic force at each spatial order
各方案下电机达到稳态后的转矩波形对比如图17所示。由图17可知各结构下电机平均转矩Tavg均为323.0N·m,并通过式(7)计算转矩波动系数τ。
 (7)
(7)
式中,Tmax、Tmin分别为电磁转矩的最大、最小值。
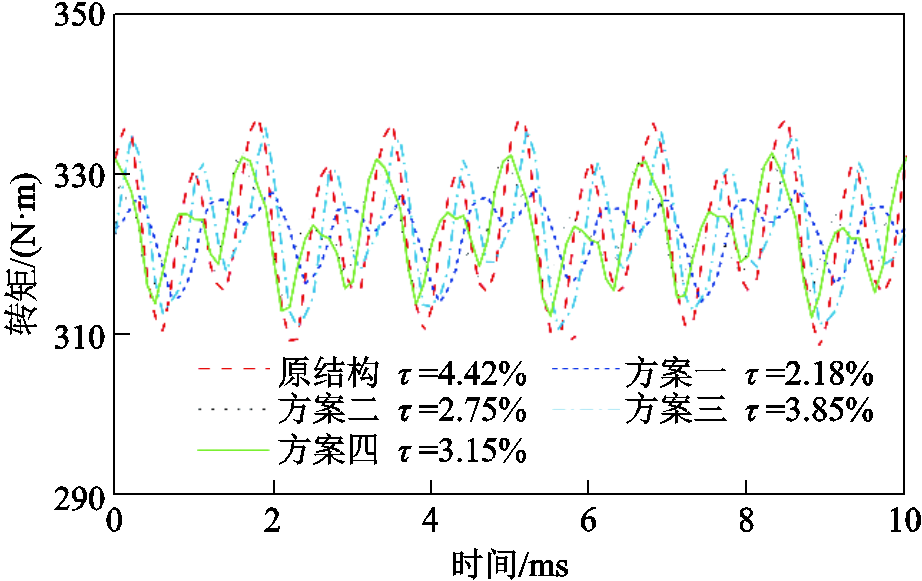
图17 输出转矩对比
Fig.17 Comparison of output torque
可以看出本文提出的混合磁极转子结构在不同程度上提高了电机转矩性能,其中方案一的转矩性能最佳,将转矩波动由原结构的4.42%降低至2.18%,降幅达50.68%。
构建新结构下的电机磁-固耦合模型,计算其振动响应。本文仅针对电机转子进行优化设计,而在振动有限元计算中忽略了电机的转子部分,因此振动分析的结构模型不变。各方案下电机机壳表面振动速度频谱如图18所示,相较于原结构,新结构下的各方案在最大振动速度频率点,即2fe频率点处的振动速度幅值均有不同程度的降低,其中方案一取得最小值,该结构下的最大振动速度幅值相较于原结构降低了29.43%,且在4fe、18fe、24fe频率点处的振动速度幅值亦有明显下降,电磁振动抑制效果最为明显。结合上文各方案对于转矩波动的优化结果可知,方案一,即永磁体N-30与N-38的组合磁极,对电机综合性能的提升最为显著,因此可将其确定为电机转子优化的最终方案。
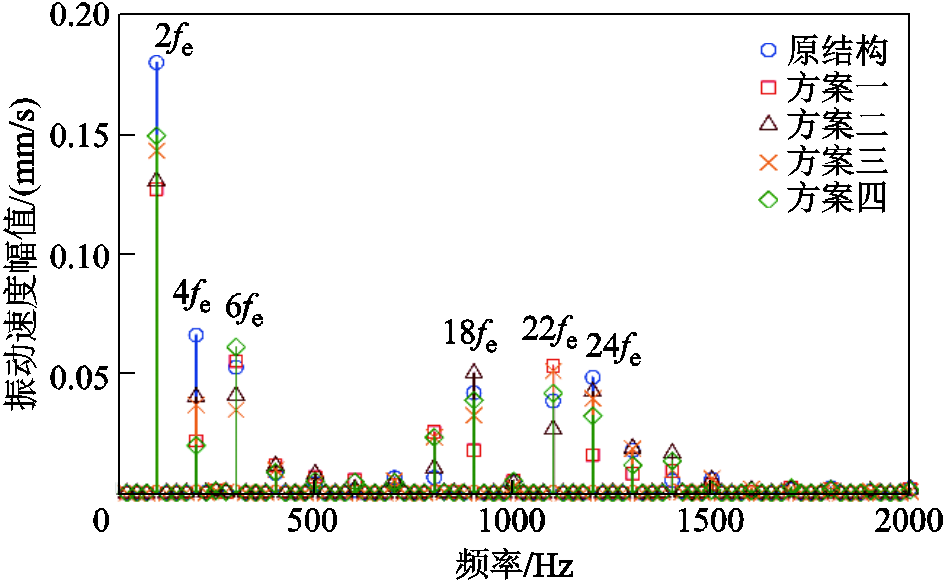
图18 振动速度对比
Fig.18 Comparison of vibration velocity spectrum
本文以一台50kW船舶用表贴式永磁同步电机为研究对象,对其电磁性能以及振动特性进行了详细的计算分析,并提出一种混合磁极转子结构来优化其电磁激振力进而抑制电磁振动,构建电机电磁场有限元和磁-固耦合分析模型,对比优化前后电机的各项电磁性能,并通过样机实验,验证了仿真结果的准确性,得到以下结论:
1)本文研究的船舶用表贴式永磁同步电机的电磁激振力是其振动主要来源,通过有限元仿真得到电机电磁激振力空间阶数为4及其整数倍,频率为电机基频偶数倍,与解析推导结果一致,其中,动态电磁激振力的峰值出现在4阶2倍频分量,此分量在电机内引起了较大振动。
2)与现有的电机结构优化方法相比,本文提出的混合磁极转子结构制造工艺更为简单,并在保持电机输出平均转矩与原结构相同的情况下,降低了电机的转矩波动。
3)转子经优化后的结构在一定程度上抑制了电机的电磁激振力,电机经优化后的最大振动速度幅值较优化前降低了29.43%,并通过实验验证了仿真结果的有效性。
参考文献
[1] Sulligoi G, Vicenzutti A, Menis R. All-electric ship design: from electrical propulsion to integrated electrical and electronic power systems[J]. IEEE Transactions on Transportation Electrification, 2016, 2(4): 507-521.
[2] Hansen J F, Wendt F. History and state of the art in commercial electric ship propulsion, integrated power systems, and future trends[J]. Proceedings of the IEEE, 2015, 103(12): 2229-2242.
[3] 张宇, 赵国新, 葛红岩, 等. 船用永磁同步电机定子模态与振动研究[J]. 电机技术, 2019(1): 1-5, 10. Zhang Yu, Zhao Guoxin, Ge Hongyan, et al. Study on the stator mode and vibration in PM synchronous motors for marines[J]. Electrical Machinery Technology, 2019(1): 1-5, 10.
[4] 陈再发, 刘彦呈, 卢亨宇. 具有参数辨识的船舶永磁同步推进电机无位置传感器控制[J]. 电机与控制学报, 2020, 24(3): 53-61. Chen Zaifa, Liu Yancheng, Lu Hengyu. Sensorless control of permanent magnet synchronous propulsion motor for ships with parameter identification[J]. Electric Machines and Control, 2020, 24(3): 53-61.
[5] 饶凡, 吴旭升, 高嵬, 等. 两极永磁电机静态内外磁场研究[J]. 电工技术学报, 2021, 36(14): 2936-2944. Rao Fan, Wu Xusheng, Gao Wei, et al. Study on internal and external magnetic field of static two-pole permanent magnet motor[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2936-2944.
[6] 姜哲, 卜飞飞, 潘子昊, 等. 永磁同步电机伺服系统改进型无差拍电流控制算法[J]. 电力工程技术, 2020, 39(6): 177-183. Jiang Zhe, Bu Feifei, Pan Zihao, et al. Improved deadbeat current control algorithm for permanent magnet synchronous motor servo system[J]. Electric Power Engineering Technology, 2020, 39(6): 177-183.
[7] 罗玉涛, 卢若皓. 基于结构参数分级优化的电机电磁噪声抑制[J]. 电工技术学报, 2021, 36(14): 2957-2970. Luo Yutao, Lu Ruohao. Hierarchical optimization of structural parameters for motor electromagnetic noise suppression[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2957-2970.
[8] 夏加宽, 康乐, 詹宇声, 等. 表贴式三相永磁同步电机极槽径向力波补偿模型及参数辨识[J]. 电工技术学报, 2021, 36(8): 1596-1606. Xia Jiakuan, Kang Le, Zhan Yusheng, et al. The model of pole slot radial force wave compensation for surface-mounted three-phase permanent magnet synchronous motor and parameter identification[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1596-1606.
[9] Zhang Wentao, Xu Yongxiang, Huang Huidong, et al. Vibration reduction for dual-branch three-phase permanent magnet synchronous motor with carrier phase-shift technique[J]. IEEE Transactions on Power Electronics, 2020, 35(1): 607-618.
[10] 李晓华, 赵容健, 田晓彤, 等. 逆变器供电对电动汽车内置式永磁同步电机振动噪声特性影响研究[J]. 电工技术学报, 2020, 35(21): 4455-4464. Li Xiaohua, Zhao Rongjian, Tian Xiaotong, et al. Study on vibration and noise characteristics of interior permanent magnet synchronous machine for electric vehicles by inverter[J]. Transactions of China Electrotechnical Society, 2020, 35(21): 4455-4464.
[11] 肖阳, 宋金元, 屈仁浩, 等. 变频谐波对电机振动噪声特性的影响规律[J]. 电工技术学报, 2021, 36(12): 2607-2615. Xiao Yang, Song Jinyuan, Qu Renhao, et al. The effect of harmonics on electromagnetic vibration and noise characteristic in inverter-duty motor[J]. Transactions of China Electrotechnical Society, 2021, 36(12): 2607-2615.
[12] Jiang Dong, Liu Kang, Liu Zicheng, et al. Four-module three-phase PMSM drive for suppressing vibration and common-mode current[J]. IEEE Transactions on Industry Applications, 2021, 57(5): 4874-4883.
[13] Verez G, Barakat G, Amara Y, et al. Impact of pole and slot combination on vibrations and noise of electromagnetic origins in permanent magnet synchronous motors[J]. IEEE Transactions on Magnetics, 2015, 51(3): 1-4.
[14] Yang Haodong, Chen Yangsheng. Influence of radial force harmonics with low mode number on electromagnetic vibration of PMSM[J]. IEEE Transactions on Energy Conversion, 2014, 29(1): 38-45.
[15] 谢颖, 李飞, 黎志伟, 等. 内置永磁同步电机减振设计与研究[J]. 中国电机工程学报, 2017, 37(18): 5437-5445, 5543. Xie Ying, Li Fei, Li Zhiwei, et al. Optimized design and research of vibration reduction with an interior permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2017, 37(18): 5437-5445, 5543.
[16] 李岩, 李双鹏, 周吉威, 等. 基于定子齿削角的近极槽永磁同步电机振动噪声削弱方法[J]. 电工技术学报, 2015, 30(6): 45-52. Li Yan, Li Shuangpeng, Zhou Jiwei, et al. Weakening approach of the vibration and noise based on the stator tooth chamfering in PMSM with similar number of poles and slots[J]. Transactions of China Electrotechnical Society, 2015, 30(6): 45-52.
[17] Putri A K, Rick S, Franck D, et al. Application of sinusoidal field pole in a permanent-magnet synchronous machine to improve the NVH behavior considering the MTPA and MTPV operation area[J]. IEEE Transactions on Industry Applications, 2016, 52(3): 2280-2288.
[18] Xing Zezhi, Wang Xiuhe, Zhao Wenliang. Research on weakening measure of radial electromagnetic force waves in permanent magnet synchronous motors by inserting auxiliary slots[J]. IET Electric Power Applications, 2020, 14(8): 1381-1395.
[19] Liu Feng, Wang Xiuhe, Xing Zezhi, et al. Reduction of cogging torque and electromagnetic vibration based on different combination of pole arc coefficient for interior permanent magnet synchronous machine[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(4): 291-300.
[20] Wang Shanming, Hong Jianfeng, Sun Yuguang, et al. Filling force valley with interpoles for pole-frequency vibration reduction in surface-mounted PM synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6709-6720.
[21] Lee S H, Hong J P, Hwang S M, et al. Optimal design for noise reduction in interior permanent-magnet motor[J]. IEEE Transactions on Industry Applications, 2009, 45(6): 1954-1960.
[22] 邢泽智. 表贴式永磁同步电机电磁激振力波的快速准确计算与分析[D]. 济南: 山东大学, 2019.
[23] 左曙光, 刘晓璇, 于明湖, 等. 永磁同步电机电磁振动数值预测与分析[J]. 电工技术学报, 2017, 32(1): 159-167. Zuo Shuguang, Liu Xiaoxuan, Yu Minghu, et al. Numerical prediction and analysis of electromagnetic vibration in permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2017, 32(1): 159-167.
[24] 陈益广, 韩柏然, 沈勇环, 等. 永磁同步推进电机电磁振动分析[J]. 电工技术学报, 2017, 32(23): 16-22. Chen Yiguang, Han Boran, Shen Yonghuan, et al. Electromagnetic vibration analysis of permanent magnet synchronous propulsion motor[J]. Transa-ctions of China Electrotechnical Society, 2017, 32(23): 16-22.
[25] Jang I S, Kim W H. Study on electromagnetic vibration analysis process for PM motors[J]. IEEE Transactions on Applied Superconductivity, 2020, 30(4): 1-6.
[26] Gieras J F, Lai J C, Wang Chong. Noise of polyphase electric motors[M]. Boca Raton: CRC Press/Taylor & Francis, 2006.
[27] 高峰, 谈韵, 陶远鹏, 等. 电动汽车驱动充电一体化控制策略研究[J]. 电力工程技术, 2018, 37(2): 73-77, 113. Gao Feng, Tan Yun, Tao Yuanpeng, et al. Research on the integrated control strategy of electric vehicle driving and charging[J]. Electric Power Engineering Technology, 2018, 37(2): 73-77, 113.
[28] 华志广, 窦满峰, 赵冬冬, 等. 基于改进型滑模观测器的PMSM无位置传感器控制[J]. 西北工业大学学报, 2018, 36(4): 754-760. Hua Zhiguang, Dou Manfeng, Zhao Dongdong, et al. Sensorless control of permanent magnet synchronous motor based on the improved sliding mode observer[J]. Journal of Northwestern Polytechnical University, 2018, 36(4): 754-760.
[29] Zhao Wenliang, Yang Zhishuo, Liu Yan, et al. Analysis of a novel surface-mounted permanent magnet motor with hybrid magnets for low cost and low torque pulsation[J]. IEEE Transactions on Magnetics, 2021, 57(6): 1-4.
Abstract Permanent magnet synchronous motor (PMSM) has many advantages, such as high power density, reliable operation and so on. Nowadays it is widely used in the field of ship propulsion. However, a poorly designed PMSM may have serious vibration and noise problems. Recently, there were many researches on electromagnetic vibration suppression methods of PMSM. But some methods may reduce the motor output torque or improve the manufacturing complexity at the same time. To address this issue, this paper takes a 50kW marine surface mounted permanent magnet synchronous motor (SPMSM) as the research target and a hybrid magnetic pole rotor structure is proposed.
Firstly, based on theoretical derivation, the source and harmonic characteristics of electromagnetic excitation force caused by this motor are analyzed, and verified by finite element method. Secondly, the stator natural frequency is solved by analytical method and finite element method respectively. Combined with the frequency characteristics of electromagnetic excitation force, the rationality of motor design is verified. Thirdly, based on multi-physics model, the vibration frequency response characteristics and characteristic frequencies of the monitoring points are calculated. Finally, on the premise of maintaining the output torque of the former motor, a hybrid magnetic pole rotor structure is proposed to weaken the harmonic component of low-order electromagnetic excitation force and suppress electromagnetic vibration. The results show that the optimized motor can effectively suppress the electromagnetic vibration while maintaining torque performance. The validity of the simulation results are verified by experiments.
Through theoretical analysis, finite element calculation and experimental test, it can be seen that the electromagnetic excitation force of this motor is the main source of vibration. And the fourth order twice electrical frequency component of the electromagnetic excitation force causes a large vibration in the motor. If measures can be taken to reduce the amplitude of this component, the motor’s vibration performance should be improved accordingly. According to the effects of armature magnetomotive force on permanent magnet and the influence of armature reaction on air gap magnetic field, this paper proposes a hybrid pole rotor structure. The simulation results show that the optimized motor can effectively suppress electromagnetic vibration while maintaining good torque performance.
The following conclusions can be drawn from the analysis of this paper: (1) The electromagnetic excitation force of the marine SPMSM studied in this paper is the main source of its vibration. Through finite element simulation, the spatial orders of the electromagnetic excitation force of the motor are four and its integer multiple, and the frequencies are even number of times of the motor's fundamental frequency, which is consistent with the theoretical results. The peak value of the dynamic electromagnetic excitation force appears in the fourth order twice electrical frequency component, which causes large vibration in the motor. (2) Compared with the previous motor structure optimization methods, the hybrid pole rotor structure has a simpler manufacturing process, and reduces the torque ripple of the motor while keeping the average output torque the same as the original structure. (3) The optimized structure of the rotor restrains the electromagnetic excitation force of the motor to a certain extent. Compared with the original structure, the maximum vibration speed amplitude of the motor after optimization is reduced by 29.43%.
keywords:Surface mounted permanent magnet synchronous motor (SPMSM), electromagnetic excitation force, electromagnetic vibration, hybrid magnetic pole, finite element method
国家自然科学基金(51977112)、江苏省自然科学基金(BK20191370)和江苏省青蓝工程项目(2019)资助。
收稿日期 2021-09-23
改稿日期 2022-04-28
DOI:10.19595/j.cnki.1000-6753.tces.211493
中图分类号:TM341
陈少先 男,1998年生,硕士研究生,研究方向为电机内多物理场耦合数值分析。E-mail:csxxhlq@163.com
丁树业 男,1978年生,教授,博士生导师,研究方向为电机内综合物理场数值分析及新型电机理论。E-mail:dingshuye@163.com(通信作者)
(编辑 赫蕾)