 表征系统频率与系统固有参数特性,提出一种电动汽车无线充电系统模型的简化方法,并对系统频率特性进行分析研究;然后提出基于频率调节提升电动汽车无线充电系统互操作性的方法;最后搭建大功率电动汽车无线充电互操作性实验平台,通过仿真与实验验证了通过频率调节提升互操作性的正确性。该文对电动汽车无线充电技术的推广与产业化发展提供了理论支撑与技术参考。
表征系统频率与系统固有参数特性,提出一种电动汽车无线充电系统模型的简化方法,并对系统频率特性进行分析研究;然后提出基于频率调节提升电动汽车无线充电系统互操作性的方法;最后搭建大功率电动汽车无线充电互操作性实验平台,通过仿真与实验验证了通过频率调节提升互操作性的正确性。该文对电动汽车无线充电技术的推广与产业化发展提供了理论支撑与技术参考。摘要 随着电动汽车无线充电技术的普及,如何实现不同厂家、不同型号的地面端与车辆端设备之间的互联互通,已成为制约无线充电技术推广和规模化的关键性问题。该文首先通过定义归一化角频率和电路类品质因数Q、表征系统频率与系统固有参数特性,提出一种电动汽车无线充电系统模型的简化方法,并对系统频率特性进行分析研究;然后提出基于频率调节提升电动汽车无线充电系统互操作性的方法;最后搭建大功率电动汽车无线充电互操作性实验平台,通过仿真与实验验证了通过频率调节提升互操作性的正确性。该文对电动汽车无线充电技术的推广与产业化发展提供了理论支撑与技术参考。
关键词:无线充电 互联互通 互操作性 频率调节 归一化角频率
随着电动汽车的普及,无线充电(Wireless Power Transfer, WPT)技术带来的便利性是显而易见的,其灵活性、可靠性、无接触式充电等特点使无线充电成为未来电动汽车主流充电方式之一[1-2]。在国内外专家学者以及科研院所、汽车企业对无线充电技术深入研究的过程中,出现了多厂家、多标准、多技术路线的情况,导致不同厂家、相同厂家不同型号的车辆端设备和地面端设备之间难以实现互联互通[3-6]。设备间互操作性较差使电动汽车的充电效率低、安全性能差等问题也很凸显,成为制约电动汽车无线充电设施推广的一个重要因素[7-9]。
电动汽车无线充电互操作性是指:相同或不同型号、版本的无线充电系统地面设备与车辆设备通过信息交互和过程控制,实现电动汽车无线充电互联互通的能力[10-12]。根据电动汽车无线充电系统的组成结构,其互操作性主要分为以下三个部分:耦合线圈互操作性、补偿网络互操作性和通信互操作性。无线充电互操作性示意图如图1所示,图中Li、Ci(i=1, 2, ···, n)表示系统不同补偿网络中的电感、电容。
通信互操作性是指通信设备可以保证电动汽车无线充电系统的地面端和车辆端设备之间具备无线信息交互能力,通过信令实现无线充电过程的控制以及相关必要信息的交互,以确保电动汽车无线充电系统的安全、可靠运行。对于通信控制方式而言,当前国内主要采用双边控制策略,国外主要采用单边控制方式,其特点见表1。但通信互操作性属于通信领域而非电气领域,因此本文不对通信互操作性进行研究。
表1 单边、双边控制方式比较
Tab.1 Comparison of unilateral and bilateral control methods

控制方式优点缺点 单边控制结构简单、成本低、可靠性好、输出保护依赖通信互操作过程中需要协调双边控制 双边控制输出的控制和保护不依赖通信、输出电流/电压的闭环控制可单独在接收端完成、安全性高 结构复杂、成本高、技术难度大
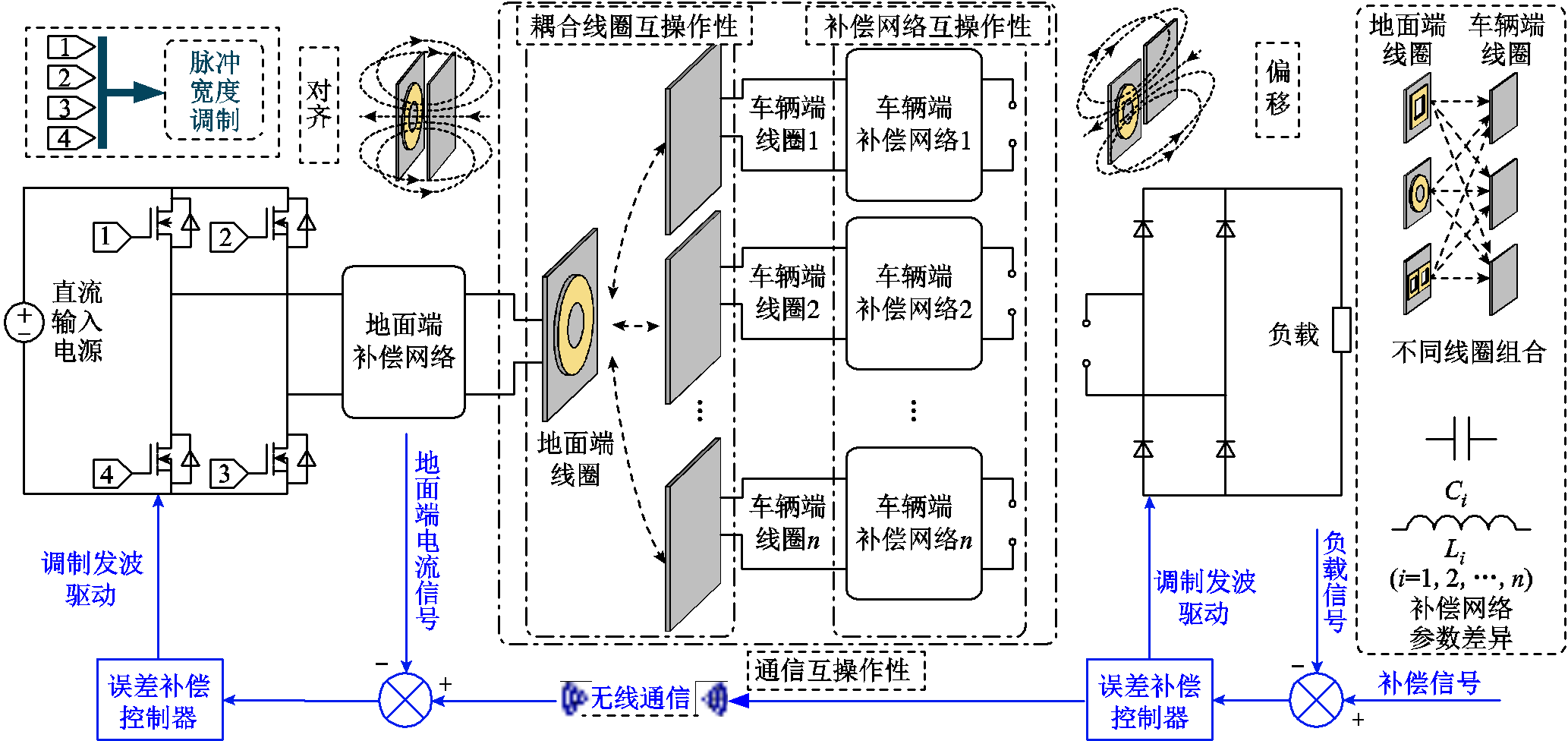
图1 电动汽车无线充电互操作性示意图
Fig.1 Schematic diagram of wireless power transfer system interoperability for electric vehicle
耦合线圈互操作性是指在规定的偏移范围内,地面端线圈可以产生足够磁通,同时车辆端线圈可以捕获到足够磁通[13-16]。常见的用于电动汽车无线充电的三种线圈结构及特点见表2和图2[17-20]。
表2 三种常见耦合线圈结构
Tab.2 Three common coupling coil structures

线圈结构特点 圆形无方向性;互感系数存在零点;同规格耦合系数偏小 方形磁通耦合范围更大;边缘漏磁降低;较圆形线圈横向偏移容忍度增加,轻便集成,制造方便 DD型磁场分布于线圈正面,减小背面漏磁;具有更好的横向偏移能力;但不适应与平面单线圈混用

图2 三种主流线圈类型
Fig.2 Three mainstream coil types
补偿网络互操作性是指地面端与车辆端设备匹配工作时,一方面是要保证系统产生的无功分量尽可能小,以满足效率要求;另一方面需要保证输出功率能达到电动汽车的用电需求。根据补偿网络中电容C、电感L的数量以及连接方式的不同,分为串联补偿和并联补偿两种基本补偿网络,以及如LLC、LCC、LCL等高阶复合补偿网络[21-25]。其中GB/T 38775推荐的为LCC-LCC型补偿网络,SAE J2954推荐的为TMN型补偿网络,其拓扑结构分别如图3a、图3b所示。图中,US为系统等效电压,RL为等效负载,L1与LP为地面端线圈,XGA与Lf1为地面端补偿电感,XVA与Lf2为车辆端补偿电感,L2与Lb为车辆端线圈,C1a、C1b、Cp、Cf1均为地面端补偿电容,C2a、C2b、Cs、Cf2均为车辆端补偿电容,其中XVA可调节。
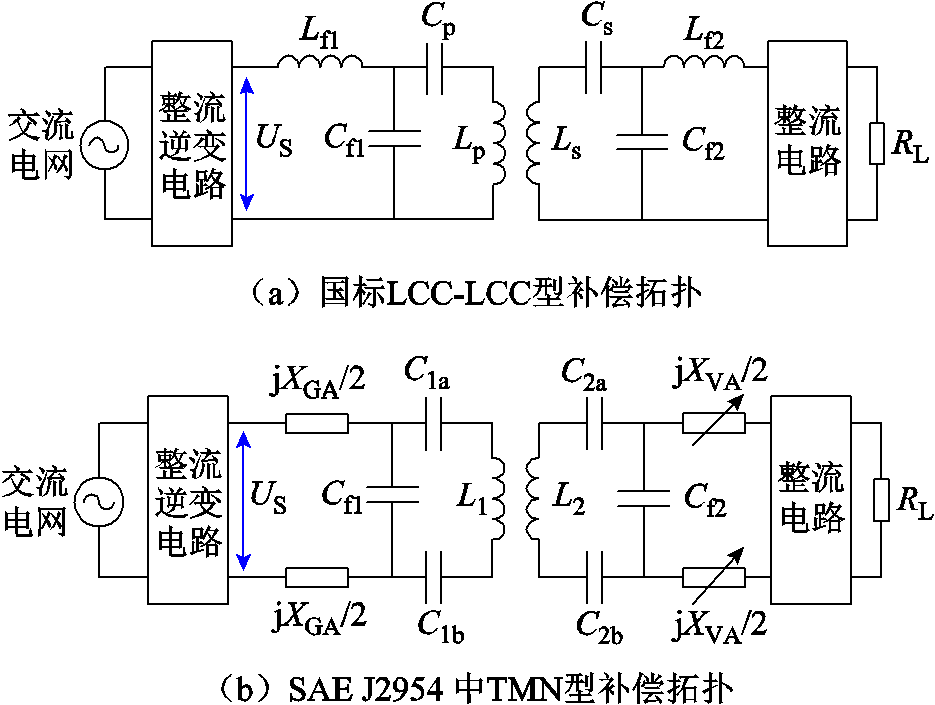
图3 电动汽车无线充电主流补偿拓扑
Fig.3 Electric vehicle WPT main compensation topology
图3所示的LCC-LCC型补偿网络具有抗偏移能力强、参数设计灵活、大功率下谐振电容电压较低、地面端电流恒流等特点,对电动汽车无线充电的应用场景具有较高的技术契合度;TMN(tunable matching networks)型补偿网络通过在地面端与车辆端添加可调电抗XGA、XVA的方式来适应不同补偿参数或线圈变化带来的不利影响,通过对其电路进行化简分析其本质依然是LCC-LCC型补偿结构。因此本文选取LCC-LCC型补偿网络作为系统的补偿网络进行研究。
本文首先针对LCC-LCC型补偿网络参数多、阶数高、分析复杂的问题,定义了归一化角频率、电路类品质因数Q、Qf,得到电动汽车无线充电系统模型的简化方法;然后提出了通过频率调节提升系统互操作性的方法;最后通过仿真和实验验证了本文互操作性提升方法的正确性,为推进不同厂家、不同型号之间的电动汽车互联互通,推动电动汽车无线充电规模化、产业化进程提供理论支撑。
在实际应用场景中,电动汽车无线充电系统的地面端与车辆端可能会存在以下问题:①地面端与车辆端生产厂家、技术路线不同,导致其相互之间补偿参数存在较大差异;②现有生产条件存在一定的局限性,导致生产的产品参数与预设值之间存在差距;③停车充电时车辆端与地面端发生偏移,导致线圈自感发生变化,偏离线圈预设值。
上述问题均会导致系统无功分量增加,无功分量成为影响系统互操作性的主要因素。考虑到线圈内阻对系统的有功损耗很小,因此当不同参数的系统进行横向对比时,为简化计算而忽略线圈内阻损耗;同时对于前、后级的控制电路采用基波分析法进行处理,忽略其高次谐波的影响。得到简化后的LCC-LCC型补偿网络,如图4所示。
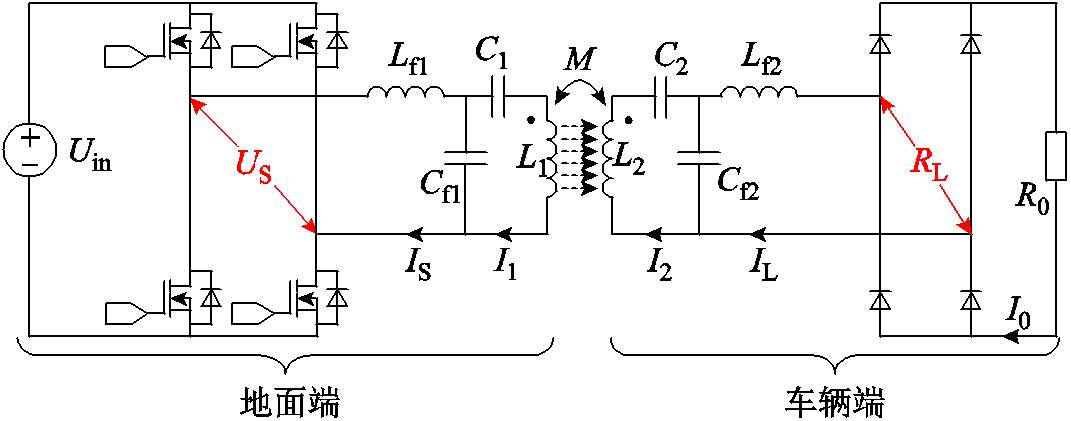
图4 LCC-LCC型补偿网络简化模型
Fig.4 Simplified model of LCC-LCC compensation network
根据图4列写系统全局KVL方程为
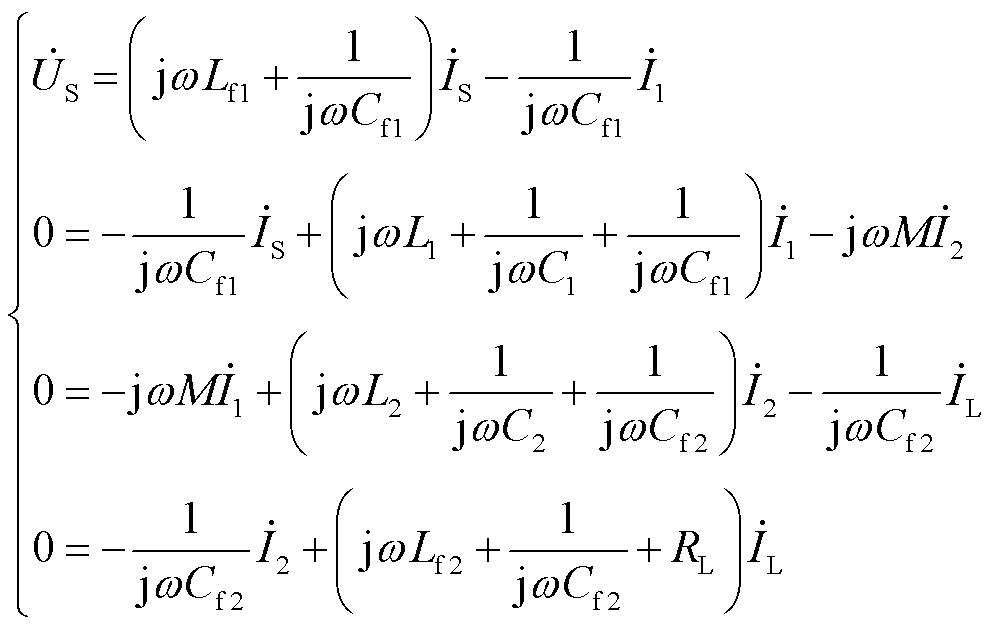 (1)
(1)
谐振条件为
 (2)
(2)
式中,ω0为系统固有谐振角频率,ω0=2πf0;f0为系统固有谐振频率;L1、L2分别为地面端与车辆端主线圈的电感值,C1、C2、Lf1、Lf2、Cf1、Cf2分别为车辆端与地面端的补偿网络中的电感、电容;下标1表示地面端,2表示车辆端。设归一化角频率为ω/ω0,为简化公式,设其倒数ω0/ω=A,A的物理意义在于可以表征系统实际工作频率f与系统固有频率f0之间的偏离程度,当f0 = f时,A=1;当f0>f时,A>1;当f0<f时,A<1。
由于本文分析过程忽略线圈内阻,为实现公式的“去量纲化”,对式(1)中等号两端依次同时除以负载电阻RL,定义类品质因数Q1,2=ω0L1,2/RL、Qf1,2=ω0Lf1,2/RL,其优点在于可以有效对复杂高阶的系统进行化简,减少参数,便于结果分析;同时还可以改善数值运算过程中的稳定性,防止数据的溢出。同时记 ,其中k表示线圈L1、L2的耦合系数。
,其中k表示线圈L1、L2的耦合系数。
由于LCC-LCC型补偿网络属于对称型补偿网络,车辆端与地面端的结构性质近似相同;同时LCC-LCC型补偿网络属于高阶补偿网络,具有参数多、阶数高、分析复杂的特点,因此本文对系统的互操作性采用定性分析的方法进行研究。电动汽车无线充电系统可进一步简化为车辆端与地面端参数完全对称的情况。令 ,简化后两端对称的LCC-LCC型补偿网络为
,简化后两端对称的LCC-LCC型补偿网络为
 (3)
(3)
根据GB/T 38775标准族和SAE J2954规定,电动汽车无线充电传输频段为79~90kHz,对应A的取值范围为[0.944, 1.076];同时在电动汽车无线充电的实际工作场景中,耦合系数k的取值范围为[0.1, 0.3]。根据方程中各部分参量间数量级的关系,结合式(3),推出系统中各部分电流的简化表达式为
 (4)
(4)
但电流的大小只能间接地反映系统能量的流动变化规律,不能直观准确地反映出系统是否具有互操作性。根据文献[10-13]可知,系统的输出功率Pout和系统效率η是直接评价系统是否具有互操作性的重要指标,因此需进一步将Pout、η转换为关于Q、Qf、A的表达式,即
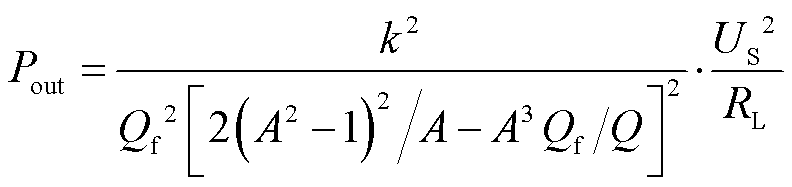 (5)
(5)
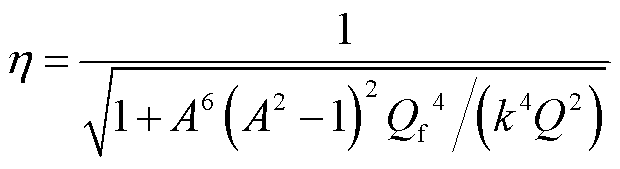 (6)
(6)
通过式(5)、式(6)可知,对于不同厂家、不同型号的地面端与车辆端,其A、k、Q、 均不相同,导致系统的Pout、η存在显著差异。耦合线圈作为无接触式能量传递的关键组成部分,其线圈之间的耦合程度直接决定了能量传输的质量,耦合系数k可以直接反映耦合程度的强弱,因此k与系统的输出功率与传递效率呈正相关;Q、变量属于系统的特有性质,不同的Q、对应不同的系统,对应的系统特性也是不同的,需要结合具体场景具体分析,反映出式(5)、式(6)具有多场景适用性;A即系统频率f是唯一一个贯穿于系统整体的变量,也是分布在公式各个部分的变量(与公式各部分均存在比值关系),可见A对于系统的输出功率具有极其重要的贡献。
均不相同,导致系统的Pout、η存在显著差异。耦合线圈作为无接触式能量传递的关键组成部分,其线圈之间的耦合程度直接决定了能量传输的质量,耦合系数k可以直接反映耦合程度的强弱,因此k与系统的输出功率与传递效率呈正相关;Q、变量属于系统的特有性质,不同的Q、对应不同的系统,对应的系统特性也是不同的,需要结合具体场景具体分析,反映出式(5)、式(6)具有多场景适用性;A即系统频率f是唯一一个贯穿于系统整体的变量,也是分布在公式各个部分的变量(与公式各部分均存在比值关系),可见A对于系统的输出功率具有极其重要的贡献。
通过前文分析可知,上述四个参数的改变均可以对系统的输出特性产生影响,因此通过优化上述四个变量可以提升系统的互操作性。但其中k、Q、均与系统本身硬件性质相关,需要添加辅助设备才能进行调节,操作难度大、成本较高。与之相比通过调节归一化角频率1/A即系统频率f的方法,只需调节前级控制电路的驱动信号即可实现,以此方法提升系统的互操作性显然更加简单便捷。
本文主要研究变化的系统频率对电动汽车无线充电系统互操作性的影响,因此为简化分析,假定电网电源经过整流逆变后为高频交流恒压源输入,且电动汽车负载电池相同。基于上述条件对系统频率变化对系统输出特性的影响进行分析。
根据式(5)可知,Pout受归一化角频率1/A即系统频率f的影响极大,Pout与A的关系如图5所示。
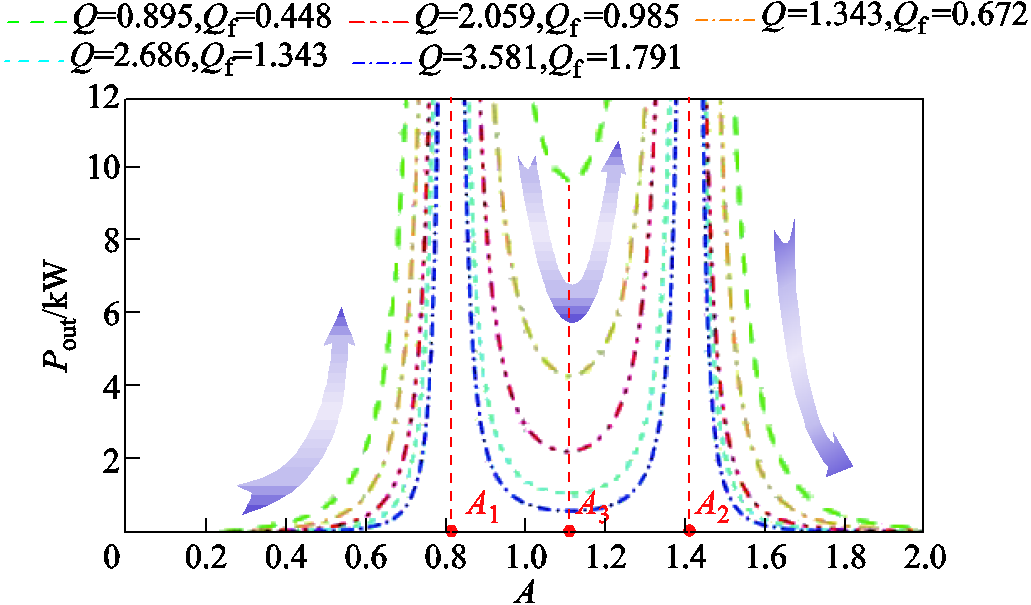
图5 A-Pout关系示意图
Fig.5 A-Pout relationship diagram
图5中分别选取了多组Q、值,其Pout曲线的升降变化规律一致。观察图5可以发现随着A的变化,Pout曲线出现两个无穷大点,对应的横坐标为A1、A2,此时系统处于频率分裂状态[26]。事实上A1、A2对应的Pout为输出功率的极大值点,但由于公式中存在部分简化,因此导致图5中出现了无穷大点,这从侧面反映出本化简过程可以有效突出系统特性。Pout曲线还存在极小值点,对应的横坐标为A3。事实上当系统未进行简化分析时,A1、A2为A曲线的极大值点的横坐标,其简化后表达式为
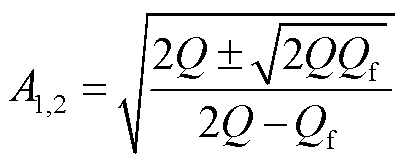 (7)
(7)
同时利用式(5)对A求偏导,除去首尾两端,得到A3的值,其简化后的表达式为
 (8)
(8)
根据式(7)、式(8)可知,LCC-LCC型补偿网络的系统输出功率的极值点由系统中Q、Qf决定。由此可见,对于不同的系统而言,其输出功率随系统频率的变化曲线的增减区间是不同的,但其变化趋势是相同的。根据上述分析,结合图4得到系统简化后的Pout随A的变化区间见表3。
表3 Pout随A的变化区间
Tab.3 Pout change interval with A
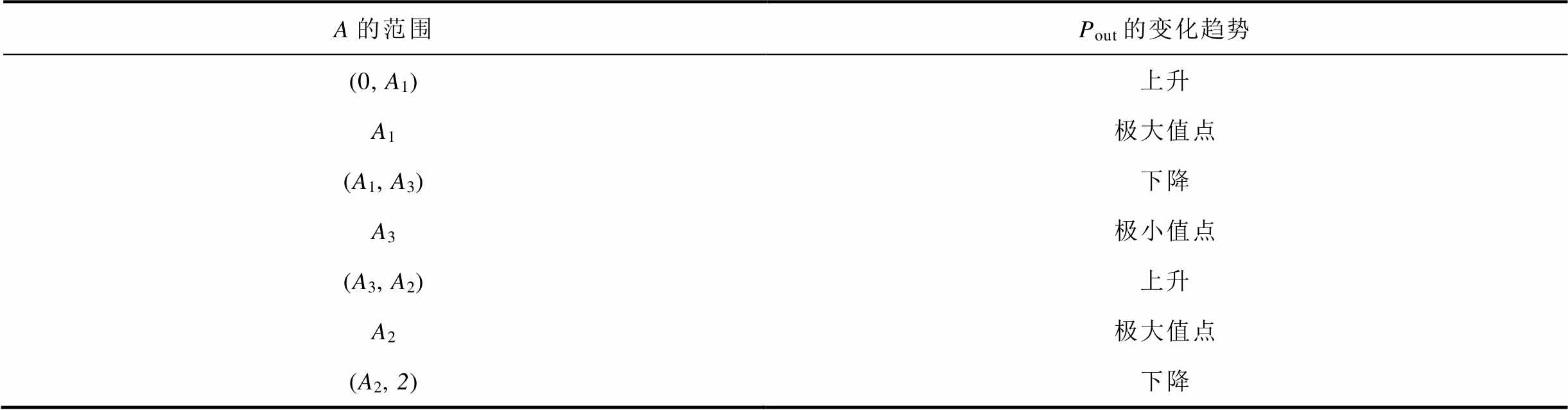
A的范围Pout的变化趋势 (0, A1)上升 A1极大值点 (A1, A3)下降 A3极小值点 (A3, A2)上升 A2极大值点 (A2, 2)下降
根据前文的分析可知,对于不同系统而言,其Pout的极值点需要根据具体的Q、Qf来确定;当电动汽车无线充电系统确定后,各部分元器件是不变的,因此只能采用调节系统频率的方法来改变Pout,使其满足互操作性要求。
根据式(6)可知归一化角频率1/A即系统频率f同样对η具有较大影响,根据式(6)绘制η与A的关系如图6所示。
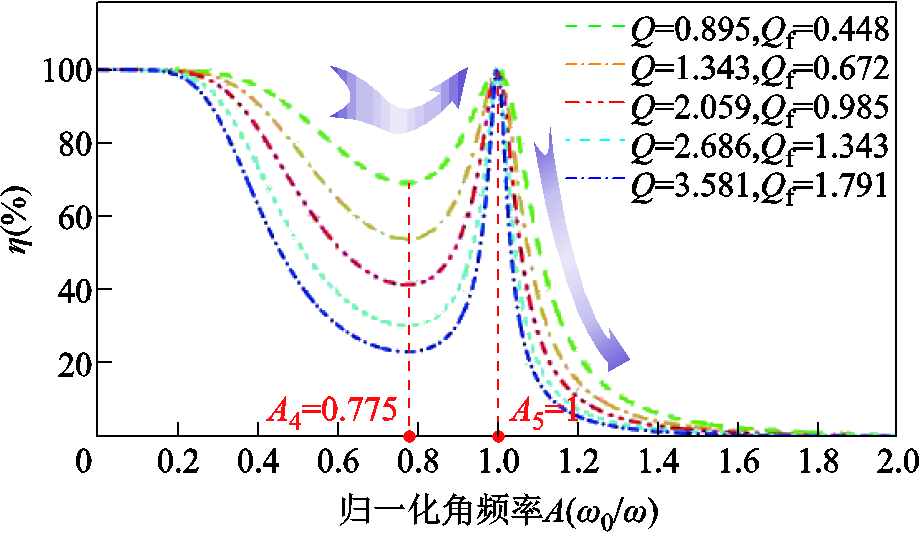
图6 A-η关系示意图
Fig.6 A-η relationship diagram
图6中同样选取了多组Q、Qf值,其η曲线的升降变化规律一致,随着A的变化,η出现一个极大值点,一个极小值点。同时在本文的模型条件下,极小值点A4=0.775,极大值点A5=1,其中A4会随着系统参数变化而发生偏移。随着A的变化η的变化趋势及增减区间见表4。
表4 η随A的变化区间
Tab.4 η change interval with A

A的范围η的变化趋势 (0, A4)下降 A4极小值点 (A4, A5)上升 A5=1极大值点 (A5, +∞)下降
当前国内外标准规定,车辆端与地面端设备正对时,系统效率需满足η≥85%;车辆端与地面端设备偏移时,系统效率需满足η≥80%。当满足上述条件时,系统满足互操作性的效率要求。
值得注意的是,本文对电动汽车无线充电系统仅做定性分析,本节中参数分析前提条件是地面端与车辆端参数对称的情况。当地面端与车辆端参数非对称时,除A5≡1为效率的极大值点不会发生改变,前文所提的具有特殊性质的点A1~A4均会发生偏移,同时在数值上也会出现小范围的波动,但整体显著的增减趋势不会发生变化。通过上述对系统频率特性的分析可知,频率调节可以有效改变系统的Pout、η,进而影响系统互操作性。
对于大多数应用场景而言,系统的电容值不会因充电环境改变等问题发生明显变化,然而系统耦合线圈L1、L2或补偿网络中补偿电感Lf1、Lf2的电感值会由于车辆之间的相对偏移、线圈加工工艺以及周围是否存在铁磁性金属异物等问题产生较大浮动,影响系统的互操作性。
因此为模拟不同厂家地面端或车辆端设备中,电感参数存在差异导致系统互操作性差的问题,选定GB/T 38775中的推荐值为系统的初始值,同时考虑到不同厂家的设备之间尽管参数存在误差,但该误差不会过大,因此选取国标推荐值以及该值中电感参数分别增减3%、5%时的数据作为仿真与实验参数,见表5。
表5 多组不同系统参数
Tab.5 Multiple groups of different system parameters
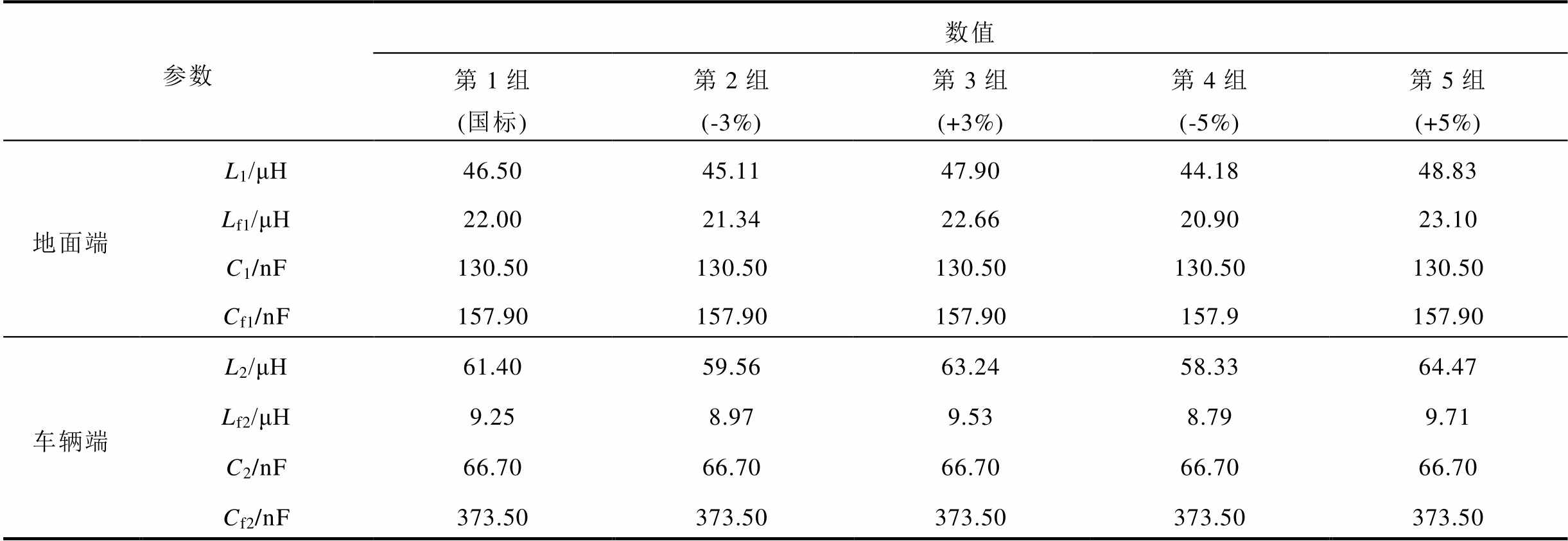
参数数值 第1组(国标)第2组(-3%)第3组(+3%)第4组(-5%)第5组(+5%) 地面端L1/μH46.5045.1147.9044.1848.83 Lf1/μH22.0021.3422.6620.9023.10 C1/nF130.50130.50130.50130.50130.50 Cf1/nF157.90157.90157.90157.9157.90 车辆端L2/μH61.4059.5663.2458.3364.47 Lf2/μH9.258.979.538.799.71 C2/nF66.7066.7066.7066.7066.70 Cf2/nF373.50373.50373.50373.50373.50
为验证前文理论的可行性,进行仿真。选取电压源(逆变后)恒压输入US=200V,负载电阻RL=12.5Ω,线圈内阻r1,2=0.1Ω,谐振频率f=85.5kHz,耦合系数k=0.185。在改变系统频率的条件下系统输出功率与系统效率如图7、图8所示。
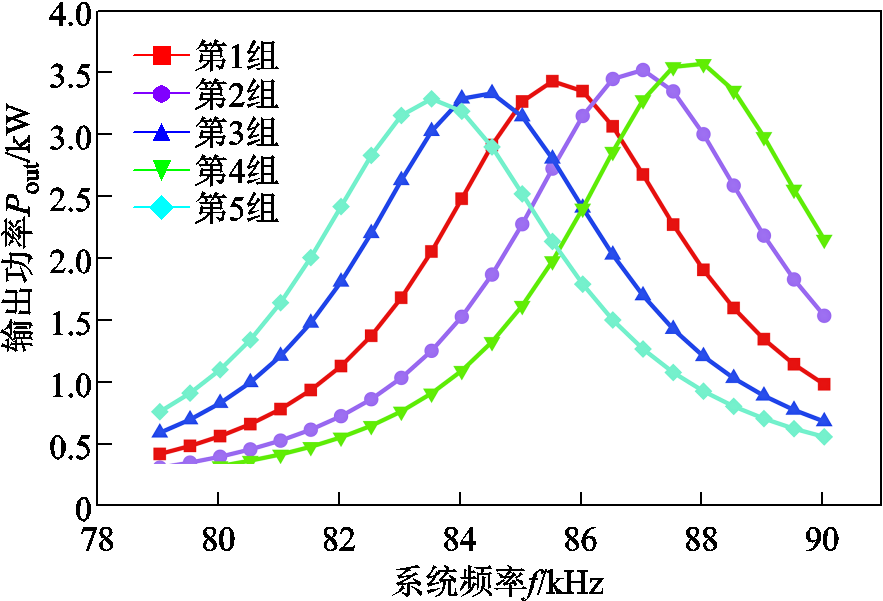
图7 不同系统参数下Pout与f的关系示意图
Fig.7 Schematic diagram of the relationship between Pout and f under different system parameters
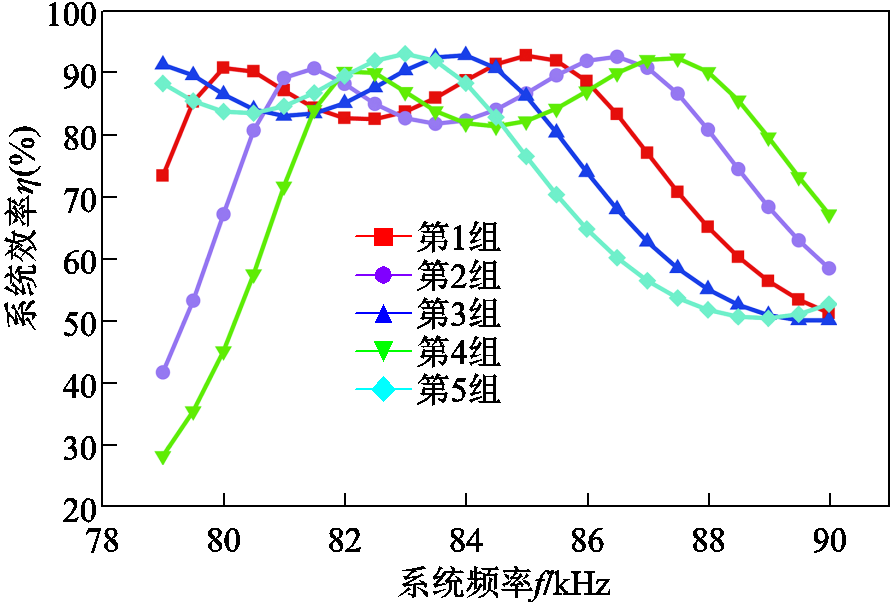
图8 不同系统参数下η与f的关系示意图
Fig.8 Schematic diagram of the relationship between η and f under different system parameters
根据仿真结果可以看出,在系统频率变化的条件下,Pout、η均会发生改变。对于不同的应用场景,系统的输出功率要求不同。当输出功率达到车辆端的用电需求时,系统满足互操作性的功率要求,否则就不具有互操作性;同理国内外标准中规定电动汽车无线充电系统需满足正对时η≥85%,偏移时η≥80%的条件,当达到效率要求时,系统满足互操作性的效率要求,否则系统将不具有互操作性。因此对于不同厂家、不同型号的地面端与车辆端而言,在一定范围内可以通过调节频率的方法改变Pout、η,进而实现系统互操作性的提升。
根据前文分析及仿真结果,本节提出一种通过频率调节提升系统互操作性的方法。记US为电源电压、IS为电源电流、UL为负载电压、IL为负载电流。首先通过仿真确定系统最佳谐振点,记该点系统频率为f0。实验从f0开始执行,同时根据仿真确定Pout、η的最大值Poutmax、ηmax,及Pout、η允许的最大误差范围 、εη。然后对系统频率开始调节,实验过程中全程测量电路中IS、US、IL、UL并计算Pout、η;选定频率变化步长,记为Δf(Δf>0);令系统频率为f0+nΔf(n=0, 1, 2,
、εη。然后对系统频率开始调节,实验过程中全程测量电路中IS、US、IL、UL并计算Pout、η;选定频率变化步长,记为Δf(Δf>0);令系统频率为f0+nΔf(n=0, 1, 2,  ),称为正向调频。设|Poutmax-Pout|=
),称为正向调频。设|Poutmax-Pout|= 、|ηmax-η|=εηn,分别判断与
、|ηmax-η|=εηn,分别判断与 、
、 与
与 的大小关系。若满足式(9)则系统已达互操作性要求,否则继续进行步长叠加。当频率变化到规定频率范围临界点时,若尚未实现互操作性则进行反向调频。同正向调节类似,若在调节过程中满足式(9),则系统达到互操作性要求;如在规定的频率范围内仍不能满足式(9),则该系统不具有互操作性。为保证实验安全,在实验开始前应进行预实验,在
的大小关系。若满足式(9)则系统已达互操作性要求,否则继续进行步长叠加。当频率变化到规定频率范围临界点时,若尚未实现互操作性则进行反向调频。同正向调节类似,若在调节过程中满足式(9),则系统达到互操作性要求;如在规定的频率范围内仍不能满足式(9),则该系统不具有互操作性。为保证实验安全,在实验开始前应进行预实验,在 的条件下,在系统允许的电压、电流应力内,观察系统的谐振情况,优化的选取。最终得出通过调节频率提升互操作性的操作流程如图9所示。
的条件下,在系统允许的电压、电流应力内,观察系统的谐振情况,优化的选取。最终得出通过调节频率提升互操作性的操作流程如图9所示。
 (9)
(9)
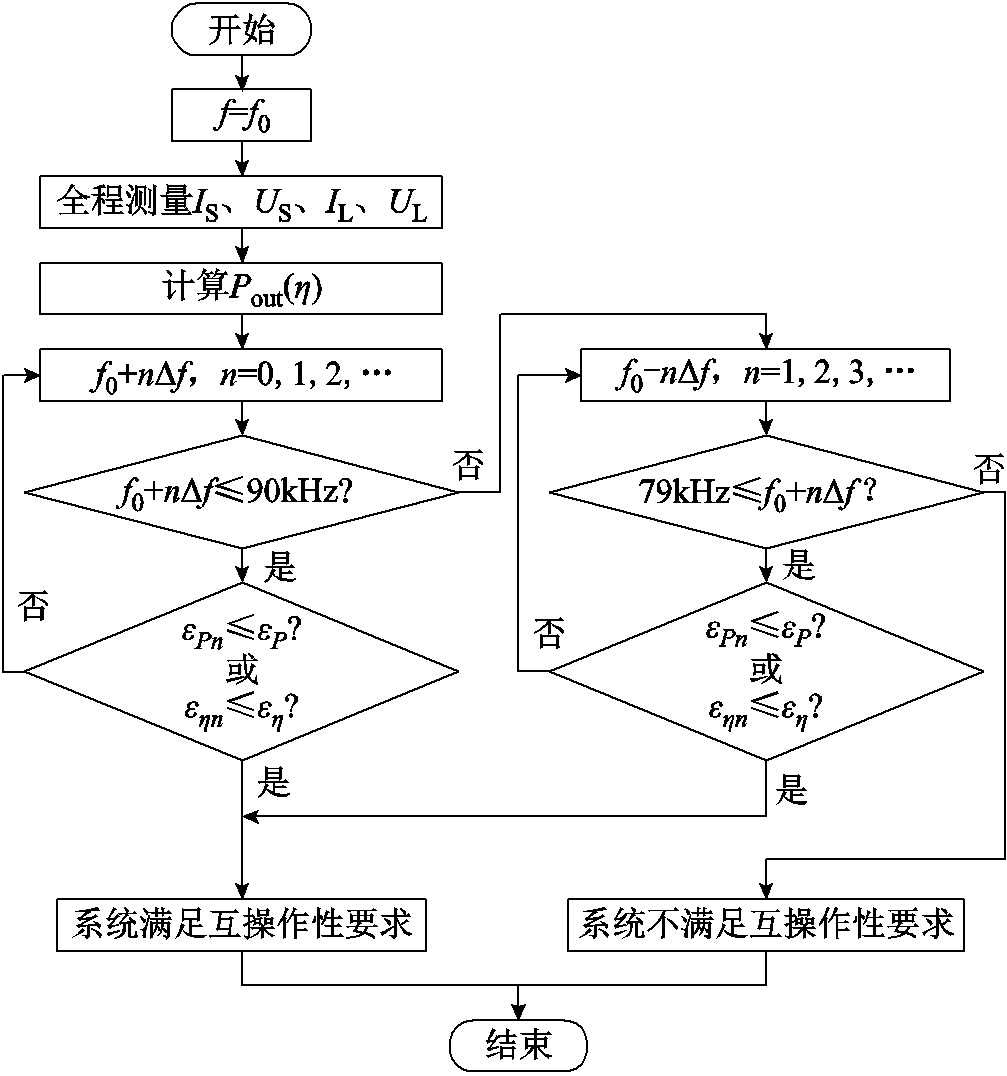
图9 调节频率提升互操作性流程
Fig.9 Flow chart of adjusting frequency to improve interoperability
为验证上述理论分析的正确性,本文采用表5中系统参数进行实验验证。搭建3.7kW大功率无线充电互操作性实验平台。实验平台主要由:稳压电源、上位机、电子负载、地面端与车辆端逆变模块、地面端与车辆端补偿网络、地面端与车辆端耦合线圈等组成,实验平台如图10所示。

图10 3.7kW电动汽车无线充电系统互操作性实验平台
Fig.10 3.7kW electric vehicle wireless power transfer system interoperability experiment platform
根据表5的参数设定,按照图9的流程进行上电实验。为确定εP、εη的值,首先进行预实验,在标准谐振频率f0=85.5kHz的条件下测量国标参数的输出功率及系统效率,分别为:P0=3.5kW, =90.6%。通过与仿真结果进行比较,结合多组实验测量数据变化情况最终确定:εP=0.2kW<3.7(100%- 85%) kW=0.56kW,εη=85%-80%=5%。此处的选取标准是在满足系统可实现互操作性的范围内进行的合理参数选取。
=90.6%。通过与仿真结果进行比较,结合多组实验测量数据变化情况最终确定:εP=0.2kW<3.7(100%- 85%) kW=0.56kW,εη=85%-80%=5%。此处的选取标准是在满足系统可实现互操作性的范围内进行的合理参数选取。
本文中实验数据均由上位机自动采集,但为了清晰地表示系统在频率调节过程中的波形变化情况及系统谐振状态,选取地面端逆变输出的电压US与电流IS波形进行分析,如图11所示。图11中的波形为表5中第5组实验数据对应的波形,此时占空比为0.5。根据电路原理可知,当电路处于完全谐振状态下,后级电路呈阻性,此时的US与IS的相位差为0,系统互操作性最佳;当实验中IS相位超前于US相位时,系统的控制电路处于硬开通状态,这对于系统而言非常危险,因此实验前根据仿真与计算得到本组参数最佳谐振频率为83.28kHz,根据本文中所提出的频率调节方法,在83.5kHz处进行上电实验,选取步长为0.5kHz。在83.5kHz处发现IS相位略滞后于US相位,为尽可能地体现实验的完整度,在83kHz处进行了实验,结果发现在83kHz处IS相位略超前于US相位,此时尽管存在硬开关现象,但其电压与电流仍在器件的应力范围之内,却不能长时间在该状态下运行。由此确定实验的最佳谐振点位于83~83.5kHz之间,与仿真和计算结果相对应。
同时可以观察到随着频率的变化,IS的幅值及相位均发生变化。IS幅值出现了明显的下降;IS相位滞后于US相位的相位差越来越大。因此在83~86.5kHz的区间内系统经历了一个“失谐—谐振—失谐”的动态变化过程,该过程也符合式(6)中在该频段下对于系统效率的描述。
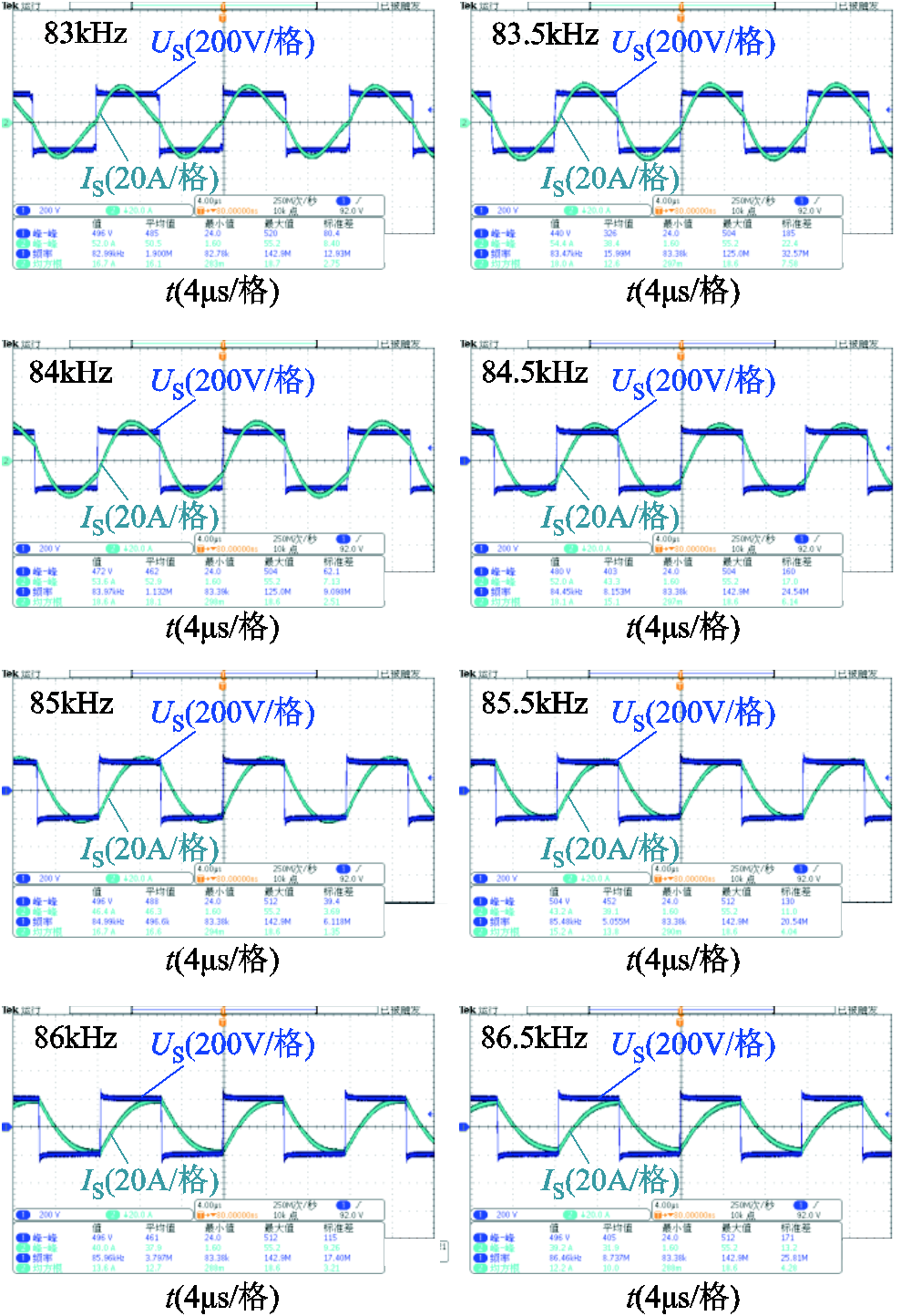
图11 地面端逆变输出部分电压、电流波形
Fig.11 Part of the voltage and current waveforms of the ground terminal inverter output
多组参数下实验结果如图12、图13所示。通过实验结果可以观察到:对于输出功率而言,随着系统频率调节,输出功率在某一频率范围内不但可以满足互操作性的要求(85%、80%分别为耦合线圈正对、偏移时的要求),而且还可以通过小范围的调节进一步优化系统的互操作性;对于系统效率而言,尽管在小范围内系统效率均满足互操作性基本要求,但仍可以通过频率调节的方式进一步改善系统的互操作性。
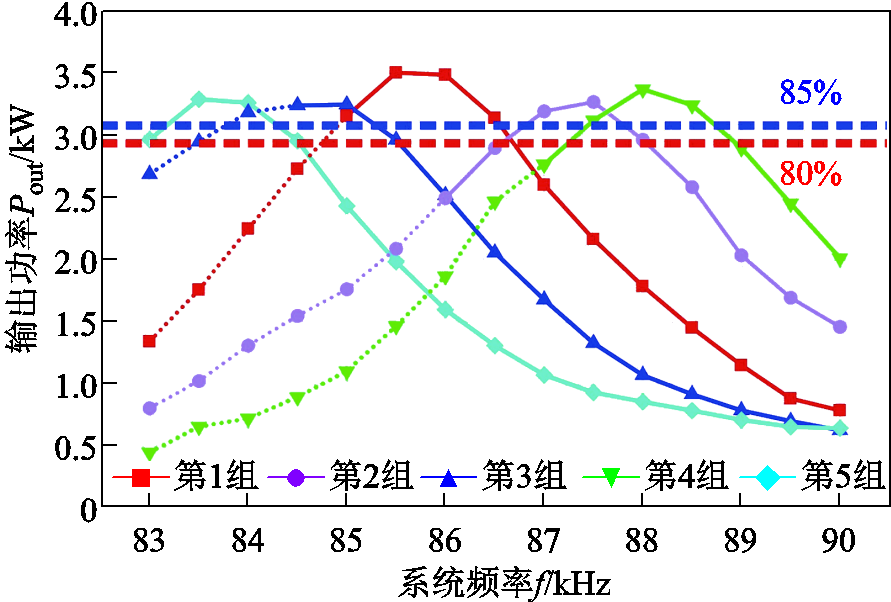
图12 多组参数下Pout与f的实验数据
Fig.12 Experimental data graph of Pout and f under multiple sets of parameters
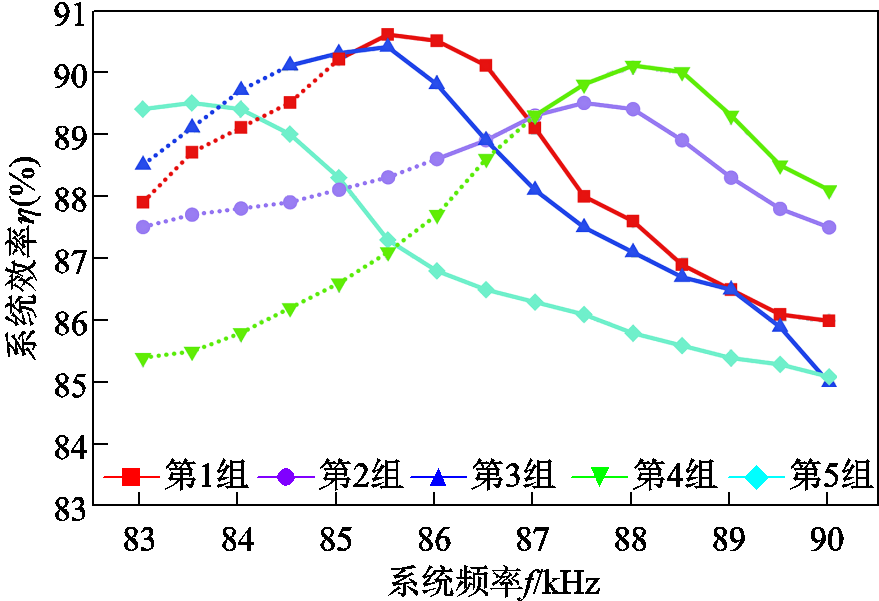
图13 多组参数下η与f的实验数据图
Fig.13 Experimental data graph of η and f under multiple sets of parameters
图12、图13中虚线表示依据理论与仿真分析得到的近似趋势,实线表示实验中实际测量值。这是由于系统频率小于该系统的谐振频率时,会出现地面端逆变器输出电流相位超前于电压相位的情况,即硬开关。这对于大功率实验而言非常危险,由于超前于电压的电流反向流经二极管,一旦超出了器件的耐受值,易发生系统损毁甚至是爆炸的危险。在这种情况下的实验毫无意义,但为完整地表述前文所提趋势,采用理论与仿真结合的方法对谐振点前的数据进行处理,得到83~90kHz区间内完整的变化曲线。
从实验结果不难看出,系统的输出功率与传输效率会随系统频率变化,即系统的互操作性会根据频率进行改变。当系统频率等于谐振频率时,输出功率与传输效率均达到最大值,系统工作在最佳状态,其变化趋势同样符合式(5)、式(6)的变化趋势。因此证明了通过频率调节的方法提升系统互操作性的可行性。但相较于仿真结果,实验结果数值较低且谐振点均向右侧偏移了0.25~0.5kHz,其主要原因有以下四点:
1)实验器件在配置过程中存在些许不可控误差,实验环境中的金属同样会对实验结果造成影响。
2)电路存在损耗,如线圈分布电容、导线内阻、磁屏蔽层等。
3)仿真系统搭建不完善,不能1:1还原实际实验环境,造成实验与仿真结果存在一定误差。
4)控制电路内部会产生部分损耗,同时上位机对系统工况的采集存在延时,造成统计误差。
针对不同厂家、不同型号的电动汽车无线充电设备由于系统参数偏差导致互操作性不高的问题,本文首先针对电动汽车无线充电系统进行有效化简,定义了归一化角频率;之后利用A的物理特性,通过改变A实现对系统互操性提升,在此基础上提出了一种通过频率调节提升系统互操作性的方法。
本文搭建了电动汽车无线充电系统互操作性实验平台,通过变频的方式分析不同参数下,系统输出功率及传输效率与A的关系,实验误差控制在5%以内,验证了通过频率调节提升系统互操作性的正确性,为电动汽车无线充电互联互通提供理论支撑和技术参考。
参考文献
[1] 杨庆新, 章鹏程, 祝丽花, 等. 无线电能传输技术的关键基础与技术瓶颈问题[J]. 电工技术学报, 2015, 30(5): 1-8. Yang Qingxin, Zhang Pengcheng, Zhu Lihua, et al. Key fundamental problems and technical bottlenecks of the wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2015, 30(5): 1-8.
[2] 朱春波, 姜金海, 宋凯, 等. 电动汽车动态无线充电关键技术研究进展[J]. 电力系统自动化, 2017, 41(2): 60-72. Zhu Chunbo, Jiang Jinhai, Song Kai, et al. Research progress of key technologies for dynamic wireless charging of electric vehicle[J]. Automation of Electric Power Systems, 2017, 41(2): 60-72.
[3] 张波, 疏许健, 吴理豪, 等. 无线电能传输技术亟待解决的问题及对策[J]. 电力系统自动化, 2019, 43(18): 1-12. Zhang Bo, Shu Xujian, Wu Lihao, et al. Problems of wireless power transmission technology urgent to be solved and corresponding countermeasures[J]. Automation of Electric Power Systems, 2019, 43(18): 1-12.
[4] 黄学良, 王维, 谭林林. 磁耦合谐振式无线电能传输技术研究动态与应用展望[J]. 电力系统自动化, 2017, 41(2): 2-14. Huang Xueliang, Wang Wei, Tan Linlin. Technical progress and application development of magnetic coupling resonant wireless power transfer[J]. Automation of Electric Power Systems, 2017, 41(2): 2-14.
[5] 吴理豪, 张波. 电动汽车静态无线充电技术研究综述(上篇)[J]. 电工技术学报, 2020, 35(6): 1153-1165. Wu Lihao, Zhang Bo. Overview of static wireless charging technology for electric vehicles: part i[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1153-1165.
[6] 吴理豪, 张波. 电动汽车静态无线充电技术研究综述(下篇)[J]. 电工技术学报, 2020, 35(8): 1662-1678. Wu Lihao, Zhang Bo. Overview of static wireless charging technology for electric vehicles: part II[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1662-1678.
[7] Yang Guang, Song Kai, Sun Ying, et al. Interoperability improvement for rectangular pad and DD pad of wireless electric vehicle charging system based on adaptive position adjustment[J]. IEEE Transactions on Industry Applications, 2021, 57(3): 2613-2624.
[8] 薛明, 杨庆新, 章鹏程, 等. 无线电能传输技术应用研究现状与关键问题[J]. 电工技术学报, 2021, 36(8): 1547-1568. Xue Ming, Yang Qingxin, Zhang Pengcheng, et al. Application status and key issues of wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1547-1568.
[9] 贾金亮, 闫晓强. 磁耦合谐振式无线电能传输特性研究动态[J]. 电工技术学报, 2020, 35(20): 4217-4231. Jia Jinliang, Yan Xiaoqiang. Research tends of magnetic coupling resonant wireless power transfer characteristics[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4217-4231.
[10] 国家市场监督管理总局, 国家标准化管理委员会. GB/T 38775.1—2020 电动汽车无线充电系统第1部分:通用要求[S]. 北京: 中国标准出版社, 2020.
[11] SAE J2954_201904. Wireless power transfer for light-duty plug-in/electric vehicles and alignment methodology wireless power transfer for light-duty plug-in/electric vehicles and alignment methodology[S]. 2019.
[12] IEC 61980-1: 2015/COR1: 2017 Corrigendum 1-Electric vehicle wireless power transfer (WPT) systems-Part 1: General requirements[S]. 2017.
[13] Seho K, Grant A C, John T B. Tripolar pad for inductive power transfer systems for EV charging[J]. IEEE Transactions on Power Electronics, 2017, 32(7): 5045-5057.
[14] Grant A J E, Grant A C, Dariusz K, et al. A new concept: asymmetrical pick-ups for inductively coupled power transfer monorail systems[J]. IEEE Transactions on Magnetics, 2006, 42(10): 3389-3391.
[15] 张献, 白雪宁, 沙琳, 等. 电动汽车无线充电系统不同结构线圈间互操作性评价方法研究[J]. 电工技术学报, 2020, 35(19): 4150-4160. Zhang Xian, Bai Xuening, Sha Lin, et al. Design and optimization of circular magnetic structures for lumped inductive power transfer systems[J]. Transactions of China Electrotechnical Society, 2020, 35(19): 4150-4160.
[16] 杨光, 宋凯, 黄晓华, 等. 用于电动汽车无线充电线圈互操作性评价的量规设备研究[J]. 电工技术学报, 2020, 35(增刊2): 363-370. Yang Guang, Song Kai, Huang Xiaohua, et al. Research on the gauge device for coil interoperability evaluation of wireless electric vehicle charging[J]. Transactions of China Electrotechnical Society, 2020, 35(S2): 363-370.
[17] Mickel B, Grant A C, John T B. Design and optimization of circular magnetic structures for lumped inductive power transfer systems[J]. IEEE Transactions on Power Electronics, 2011, 26(11): 3096-3108.
[18] Mickel B, John T B, Grant A C, et al. Development of a single-sided flux magnetic coupler for electric vehicle IPT charging systems[J]. IEEE Transactions on Industrial Electronics, 2013, 60(1): 318-328.
[19] Adeel Z, Hao H, Grant A. C, et al. Investigation of multiple decoupled coil primary pad topologies in lumped IPT systems for interoperable electric vehicle charging[J]. IEEE Transactions on Power Electronics, 2015, 30(4): 1937-1955.
[20] Abiezer T, Seho K, Lin Feiyang, et al. A hybrid solenoid coupler for wireless charging applications[J]. IEEE Transactions on Power Electronics, 2019, 34(6): 5632-5645.
[21] Zhu Qingwei, Wang Lifang, Liao Chenglin. Compensate capacitor optimization for kilowatt-level magnetically resonant wireless charging system[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 6758-6768.
[22] Li Siqi, Li Weihan, Deng Junjun, et al. A double-sided LCC compensation network and its tuning method for wireless power transfer[J]. IEEE Transactions on Vehicular Technology, 2015, 64(6): 2261-2273.
[23] Li Weihan, Zhao Han, Deng Junjun, et al. Comparison study on SS and double-sided LCC compensation topologies for EV/PHEV wireless chargers[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4429-4439.
[24] Yan Zhengchao, Zhang Yiming, Zhang Kehan, et al. Fault-tolerant wireless power transfer system with a Dual-Coupled LCC-S topology[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 11838-11846.
[25] Li Weihan, Zhao Han, Li Siqi, et al. Integrated LCC compensation topology for wireless charger in electric and plug-in electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2015, 62(7): 4215-4225.
[26] 张献, 杨庆新, 陈海燕, 等. 电磁耦合谐振式传能系统的频率分裂特性研究[J]. 中国电机工程学报, 2012, 32(9): 167-173. Zhang Xian, Yang Qingxin, Chen Haiyan, et al. Research on characteristics of frequency splitting in electromagnetic coupling resonant power transmission systems[J]. Proceedings of the CSEE, 2012, 32(9): 167-173.
Abstract In recent years, electric vehicle wireless power transfer technology has been popularized and promoted due to its advantages of high safety, high reliability, high energy efficiency and high adaptability. However, with the development of the technology, it will inevitably lead to the coexistence of multiple manufacturers, models and technical routes. There are obvious differences in power level, transmission distance, coil type, compensation structure, control mode, packaging process, communication and other aspects. Therefore how to realize the interoperability between ground terminal equipments and vehicle terminal equipment which comes from different manufacturers and models has become the key to the development of electric vehicle wireless wireless power transfer technology. This paper proposes a method to improve system interoperability based on frequency regulation. And according to this method the output characteristics of systems without interoperability or with poor interoperability can be improved in a wide range.
Firstly, the fundamental wave analysis method is used to construct the KVL equation for the wireless power transfer system of LCC-LCC type electric vehicle. By defining the normalized angular frequency, the circuit similar quality factor Q and Qfto characterize the system frequency and the inherent parameter characteristics and simplify the equation of the system. Then simplify the expressions of the system output power and system efficiency by using the relationship of the order of magnitude under. According to the above study, the change curves of the output power and system efficiency under different system parameters are determined.
The above analysis proves theoretically the influence of system frequency on interoperability. A method to improve the interoperability of the wireless power transfer system based on frequency regulation is proposed. US, IS, UL, IL is the power supply voltage, power supply current, load voltage and load current respectively. First, determine the optimal resonance point of the system through simulation and record the system frequency at this point as f0. The experiment starts from f0,at the same time, determine the maximum values Poutmax and ηmax of Pout and η, and the maximum allowable error ranges εP and εη of Pout and η according to the simulation.Then the system frequency was adjusted. During the experiment, the US, IS, UL, IL in the circuit was measured and calculate Pout and η.Select the frequency change step as Δf (Δf>0) .Set the system frequency to f0+nΔf (n=0, 1, 2,…) and it is called forward frequency modulation.Record |Poutmax-Pout|=εPnand |ηmax-η|=εηn, and judge the relationship between εPn and εP, εηn and εη.If the value satisfied εPn≤εPand εηn≤εη, then the system has met the interoperability requirements. If not, continue to stack the steps. When the frequency changes to the critical point of the specified frequency range, if interoperability has not been achieved, reverse frequency modulation will be carried out like forward adjustment.
The experimental results show that the output power and transmission efficiency of the system will change with the change of system frequency and the interoperability of the system will change according to the frequency too. This provides the feasibility of improving system interoperability through frequency regulation. However, compared with the simulation results, the experimental results are relatively low and the resonance points are shifted to the right by 0.25~0.5 kHz. The main reasons are environmental interference, device loss, statistical error, etc.
keywords:Wireless power transfer, interconnection, interoperability, frequency adjustment, normalized angular frequency
国家自然科学基金资助项目(52122701,51977147,51807138)。
收稿日期 2021-10-30
改稿日期 2021-12-24
DOI:10.19595/j.cnki.1000-6753.tces.211746
中图分类号:TM724
陈志鑫 男,1995年生,博士研究生,研究方向为无线电能传输技术,工程电磁场与磁技术等。E-mail:chenzhixintgd@163.com
张 献 男,1983年生,博士,教授,博士生导师,研究方向为无线电能传输技术,工程电磁场与磁技术等。E-mail:zxshow1983@163.com(通信作者)
(编辑 赫蕾)