
图1 DSEM结构
Fig.1 Structural diagram of DSEM
摘要 定子绕组匝间短路是电励磁双凸极电机常见的故障,当匝间短路故障匝数较少时,对电机磁场的影响较小,使得难以通过单一故障特征精确地识别故障。该文通过分析该电机的本体结构和故障特征的提取机理,提出了一种基于振动和相电流信号的多源机电信号融合的电励磁双凸极电机短路故障综合诊断方法——基于多分类支持向量机及改进卷积神经网络的信号融合故障诊断。该文首先根据电励磁双凸极的结构特点研究了短路故障发生时特征信号的变化情况及提取机理;其次根据理论分析结果提出了一种自寻优卷积神经网络结合支持向量机的多源信号融合的故障诊断方法,该方法首先分别利用两种算法计算两个单信号特征下的故障诊断概率,再利用D-S证据理论,得出融合后的诊断结果;最后通过实验表明,该文所提出的诊断方法可以更有效地识别电机不同的短路故障,降低了误判率,解决了单一信号源诊断方法精度较低的问题,具有良好的可靠性和互补性。
关键词:电励磁双凸极电机 短路故障 机电信号融合 卷积神经网络 支持向量机
电励磁双凸极电机(Doubly Salient Electro-magnetic Machine, DSEM)是一种典型的开关磁阻电机[1-2],定、转子都是双凸极结构,发电运行时通过二极管整流即可完成电能变换,且转子上没有任何绕组和永磁体,结构简单,可靠性高,适合于航空发动机起动/发电机应用场合。然而在航空领域,电机运行环境较为恶劣,振动强,温度变化较大,且定子槽面积较小,槽满率较高。根据现场经验来看,绕组之间有一定概率因为摩擦或装配而导致匝间短路故障发生,绕组短路故障是其较为常见的故障形式,早期故障特征并不明显,对磁场影响较小。但短路点的短路环流能达到几倍于正常电流值的大小,过高的电流引起的发热会产生局部热点,恶化绝缘损坏,使故障进一步发展。若不能在故障早期检测出故障状态,将对整个电机系统造成巨大威胁。作为航空电力系统中重要的电能转换设备,起动/发电机的可靠性直接影响机载设备的用电稳定性,甚至影响整个飞机的飞行安全,因此研究高可靠的DSEM绕组短路故障检测方法具有重要意义。
目前,许多文献已经对DSEM的发电特性、容错性能和转矩脉动等方面做了大量研究[3-10],但是对于DSEM故障诊断的研究却很少。开关磁阻电机故障诊断方法可以分为三类[11]:①基于电机模型的预测故障分析;②通过信号处理对故障信号进行分析,比如快速傅里叶变换(Fast Fourier Transform, FFT)、小波变换等;③利用机器学习算法自我学习故障特征并识别故障。
目前前两类方法已经在开关磁阻电机及DSEM进行了研究并取得了一定的成果。文献[12]利用小波包分解法,对开关磁阻电机的功率变换器故障进行诊断,通过注入两个PWM信号至功率变换器中,仅需要单个电流互感器即可提取出各相电流信息。文献[13]利用瞬时有功功率和瞬时无功功率中二次谐波分量的大小作为故障特征,对闭环控制下的永磁磁阻电机中的匝间短路故障进行诊断。文献[14]利用低压正弦激励所获得的电流响应的变化判断永磁同步电机匝间短路的发生及严重程度。文献[15]对无刷直流电机匝间短路下电流谐波的组成进行了仿真与分析,利用三次谐波分量有效检测匝间短路故障。文献[16]利用Park变换对开关控制信号进行d-q分解,利用各相信号分解后的差值是否为0来判断是否发生了匝间短路故障。文献[17]利用反电动势电流对功率变换器单管开路故障进行诊断。文献[18]利用整流器单管开路故障前后,DSEM中性点电压的差异判断是否发生开路故障。传统的基于模型和信号处理的方法能够实现诊断的目的,但不易寻找到复杂的高维特征。
得益于机器学习的发展,电机的故障诊断手段变得更加丰富。机器学习利用大量的历史样本进行训练,可以自动寻找隐藏在样本间复杂高维的故障特征,大大提高了诊断准确性。文献[19]改进了深度置信网络,并将其用于航空发电机旋转整流器故障诊断中。文献[20]利用含有多尺度卷积核的卷积神经网络来处理振动信号,进而判断电机的健康状态。文献[21]改进了概率神经网络,利用主成分分析对数据进行预处理,提高对电机故障诊断能力。文献[22]利用基于循环神经网络的可变自编码器对电机振动信号进行处理。上述文献使用了先进的智能学习算法,但都是基于单一的故障特征量进行诊断,单一信号源容易受到不确定因素干扰,例如传感器故障以及不确定的环境因素等,影响检测精度。
为了提高故障诊断的准确性,多源的信息融合诊断技术在风电中得到了广泛应用,文献[23]用决策融合的方法融合了电机相电流信号特征,从而诊断电机外部轴承的故障。文献[24]利用故障时电流平均绝对值和振动幅值变化设计了两种融合电流和振动信号的变流器诊断方法。多源信号方法具有良好的互补性和可靠性,往往可以得到比单一信号源诊断更好的诊断结果。
本文通过对一台四相8-10极分布励磁DSEM本体结构和故障特征的提取机理进行研究,提出一种基于多分类支持向量机(Support Vector Machine,SVM)及改进卷积神经网络(Convolution Neural Network,CNN)融合的绕组匝间短路故障诊断策略。首先建立分布励磁DSEM的数学模型,分析电流和振动信号在健康和故障状态下的变化情况,研究了电流基频幅值和振动信号的提取机理,并用于电机故障诊断;其次,当发生匝间短路故障时,根据电流和振动信号的变化特点,将电流信号输入SVM中,振动信号输入改进CNN模型中,得到单一故障信号下的故障概率;然后利用D-S证据理论的证据组合规则,得到了多源信号的分类故障诊断结果;最后通过样机实验,验证了融合诊断策略较单一信号源诊断具有更高的准确性和置信度。
本文以四相8-10极分布励磁DSEM为研究对象,电机的结构如图1所示。电机电枢绕组每一相由两套绕组组成,相同的极性相互串联。
图1 DSEM结构
Fig.1 Structural diagram of DSEM
在不计磁饱和状态下,DSEM转矩T为[25]
 (1)
(1)
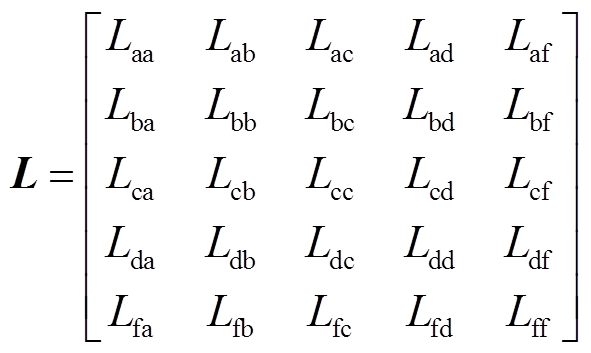
式中,I为电机的相电流和励磁电流,I= ,if为励磁电流;θ为电机转子的机械位置角;L为电机的相绕组电感、励磁绕组电感及它们之间的互感,其表达式为
,if为励磁电流;θ为电机转子的机械位置角;L为电机的相绕组电感、励磁绕组电感及它们之间的互感,其表达式为
上述转矩公式包含了励磁转矩、自感转矩、互感转矩和齿槽转矩四个部分。对于本文提取故障特征而言,由于DSEM的互感转矩较小,因此可以被忽略;而齿槽转矩是由励磁电流和励磁绕组自感决定,在电机故障前后没有变化,因此同样可以被忽略。
展开式(1)并忽略互感和齿槽转矩后,得到的励磁转矩和自感转矩可以分别表示为
 (2)
(2)
 (3)
(3)
式中, 为励磁转矩,由励磁绕组和电枢绕组相互作用产生;
为励磁转矩,由励磁绕组和电枢绕组相互作用产生; 为自感转矩,由电枢绕组自感产生;θe为电机的电角度;p为转子极数。
为自感转矩,由电枢绕组自感产生;θe为电机的电角度;p为转子极数。
本文发电机采用全桥不控整流发电方式。由于相邻绕组间短路发生概率更高,因此本文对相邻绕组故障进行研究,共研究两种不同的匝间短路故障。以A1和B2为例,故障示意图如图2所示,电机每个定子极绕组有40匝,绕组A1每一匝分别用Z1~Z40表示,绕组B2每一匝分别用Z1′~Z40′表示。匝间短路故障发生在同一相同一绕组中,且短路匝数为2时,以A1绕组中的Z2和Z4短路为例,定义为故障F1。对于相邻两相绕组匝间短路故障,两绕组发生的短路位置由于靠近,因此两绕组的短路点距离轴心相等,即以Z2和Z2′短路为例来说明,定义为故障F2。
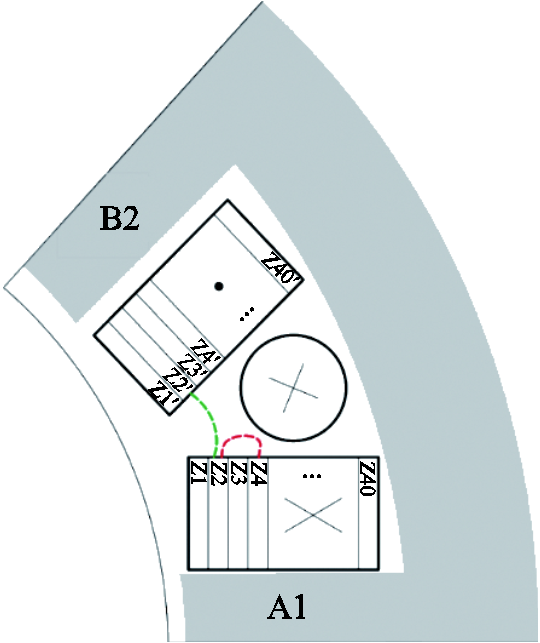
图2 故障示意图
Fig.2 Fault illustration
1.2.1 电流信号分析
故障F1较故障F2涉及的匝数少,对磁场的影响较小,本文以故障F1为例进行电流信号分析。在故障F1情况下,相绕组磁场发生改变,故障电流主要是无功电流,并产生磁链,这与健康状态下的磁链相反。故障电流引起的磁链 可近似为[26]
可近似为[26]
 (4)
(4)
式中, 和φf分别为故障电流磁链的幅值及初始相角。
和φf分别为故障电流磁链的幅值及初始相角。
因此故障发生时,在原有磁链基础上增加了正弦故障分量,进而影响磁阻电机磁链的变化。电机在正常及故障F1情况下的磁链、相电流和相电流频谱对比如图3~图5所示。可以看到由于绕组的故障使得磁链发生变化,而磁链的变化会引起电流发生变化,产生不平衡电流,使得原本差异较小的电流幅值变大,在图5中可以看到变化最大的是电流基波幅值。
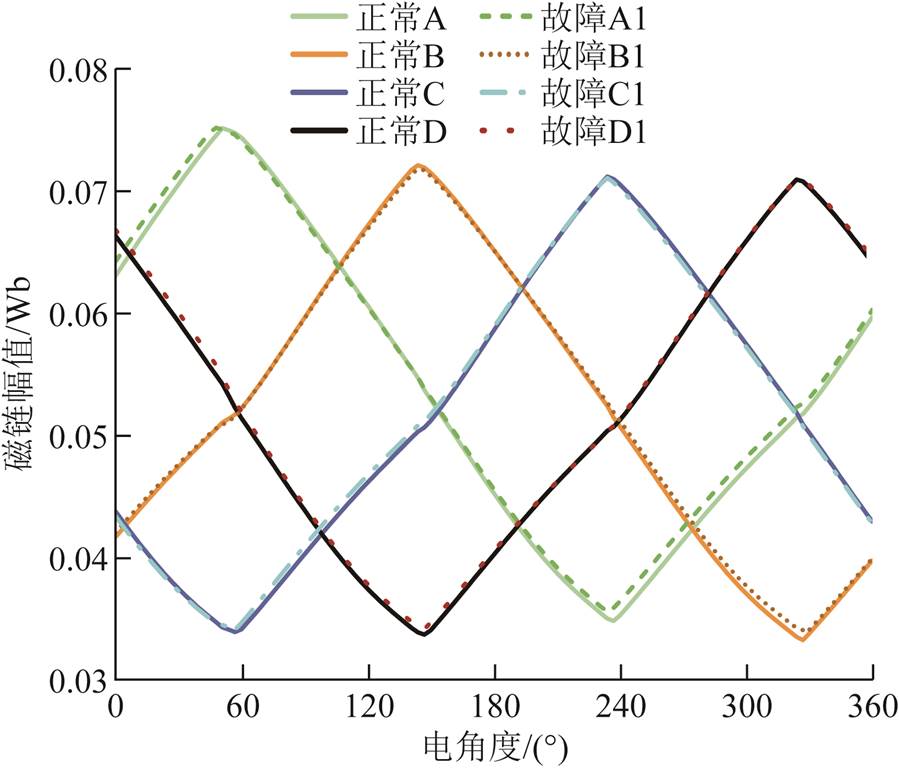
图3 正常及故障F1的磁链对比
Fig.3 Comparison of flux linkage under normal and fault F1 conditions

图4 正常和故障F1时相电流波形对比
Fig.4 Comparison of current waveforms under normal and fault F1 conditions
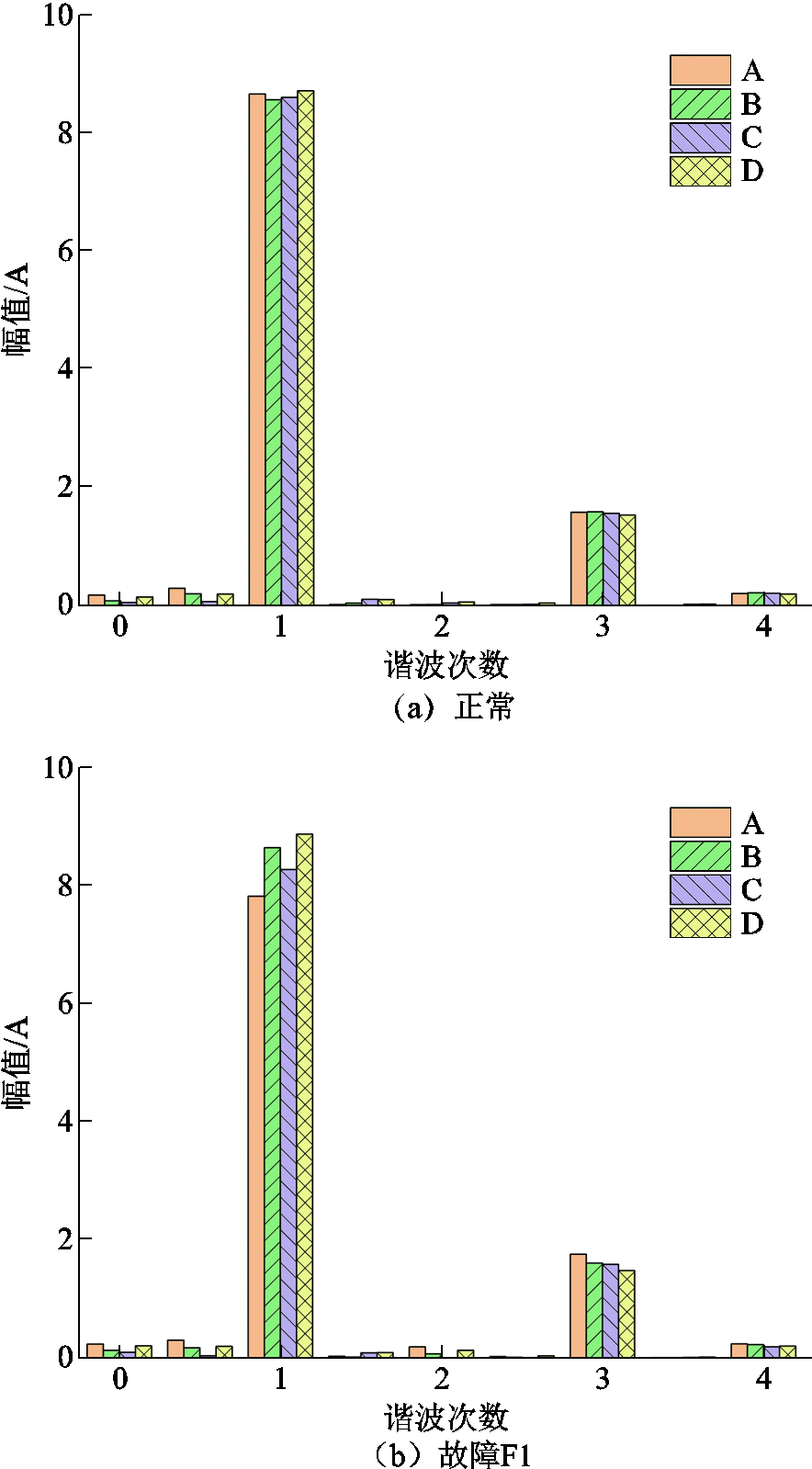
图5 正常与故障F1时相电流频谱图
Fig.5 Current spectrum under normal and fault F1 conditions
四相基频电流幅值的差值用基频电流幅值不平衡系数S来表示,S越大表示四相基频电流幅值差值越大。S的表达式为
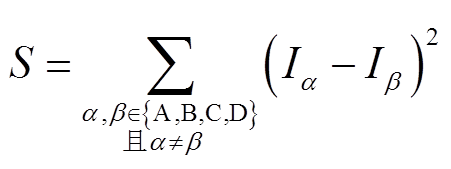 (5)
(5)
式中,Ia和Ib为相电流基频分量幅值。
分布励磁DSEM正常运行时,由于四相平衡对称,电流幅值差较小,S稳定在0附近。而当故障F1发生时,导致基频电流幅值差值变大,S将变大。故障F2同样会使得基频电流幅值变得不平衡,且其不平衡系数相较于故障F1更大。因此,本文将四相基频电流幅值作为待检测的短路故障特征量。
1.2.2 振动信号分析
将DSEM的相电流和电感分别进行傅里叶级数展开,由于四相电流和电感在空间上对称,因此本节只写出了A相的傅里叶级数展开表达式[26],即
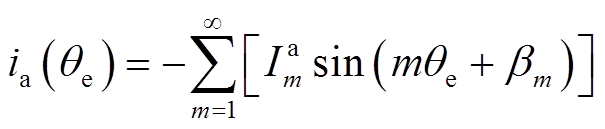 (6)
(6)
 (7)
(7)
 (8)
(8)
式中,Laa为A相的自感;Laf为A相和励磁绕组的互感;m和n分别为电流和电感的谐波次数;Ia m和bm分别为A相m次电流谐波的幅值和相位;La0和Laf0分别为Laa和Laf的0次谐波分量;La n和an分别为A相自感第n次谐波的幅值和相位;Laf n和gn分别为Laf第n次谐波的幅值和相位。
将式(6)~式(8)代入式(2)、式(3)中,则励磁转矩和自感转矩的公式可以写为
 (9)
(9)
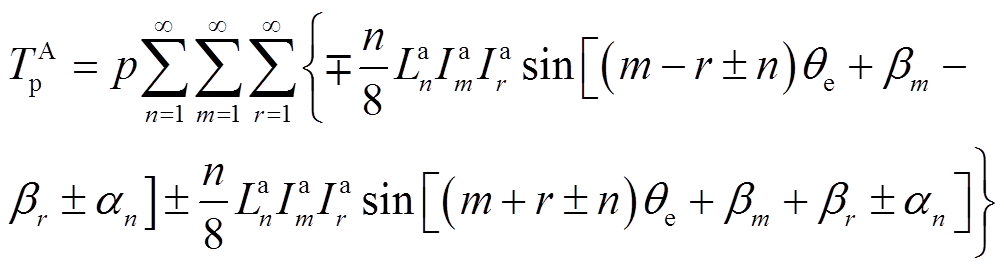 (10)
(10)
式中, 为A相产生的励磁转矩;
为A相产生的励磁转矩; 为A相产生的自感转矩;r为电流谐波次数。正常情况下电机的励磁转矩和自感转矩分别为
为A相产生的自感转矩;r为电流谐波次数。正常情况下电机的励磁转矩和自感转矩分别为
 (11)
(11)
 (12)
(12)
式中, 为自然数集。当正常电机转矩的谐波次数不等于4k时,四相转矩谐波大小相等,在空间上相互对称,互相抵消。因此式(11)、式(12)仅含有4k次转矩谐波。而当电机发生匝间短路时,非4k次转矩谐波由于四相电流幅值大小不等、相位不对称,四相转矩无法完全抵消,进而导致电磁转矩产生了4k次以外的转矩谐波,即式(11)、式(12)会产生非4k次分量。
为自然数集。当正常电机转矩的谐波次数不等于4k时,四相转矩谐波大小相等,在空间上相互对称,互相抵消。因此式(11)、式(12)仅含有4k次转矩谐波。而当电机发生匝间短路时,非4k次转矩谐波由于四相电流幅值大小不等、相位不对称,四相转矩无法完全抵消,进而导致电磁转矩产生了4k次以外的转矩谐波,即式(11)、式(12)会产生非4k次分量。
以故障F1仿真为例,电机转矩的波形图和频谱图如图6和图7所示。可以看出,发生故障F1后,转矩发生明显改变,转矩产生了4k次以外的转矩谐波,其中2次谐波分量的增加较为明显。而转矩的变化会直接导致电机振动状态发生变化,因此本文选取了电机振动信号作为另一个故障特征量进行DSEM短路故障诊断。
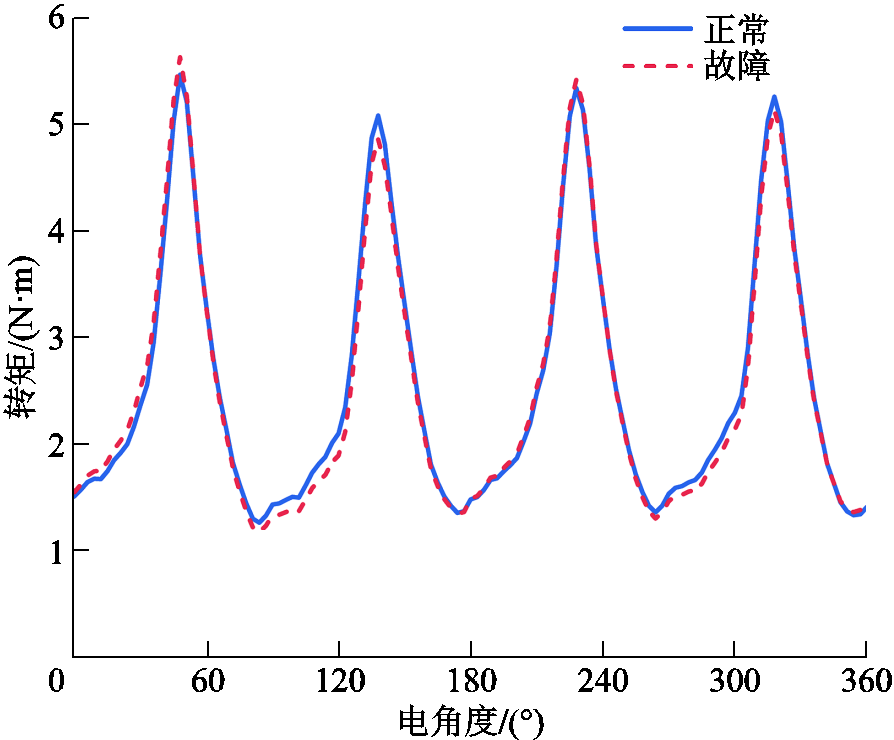
图6 正常与故障F1下转矩波形对比
Fig.6 Comparison of torque under normal and fault F1 conditions
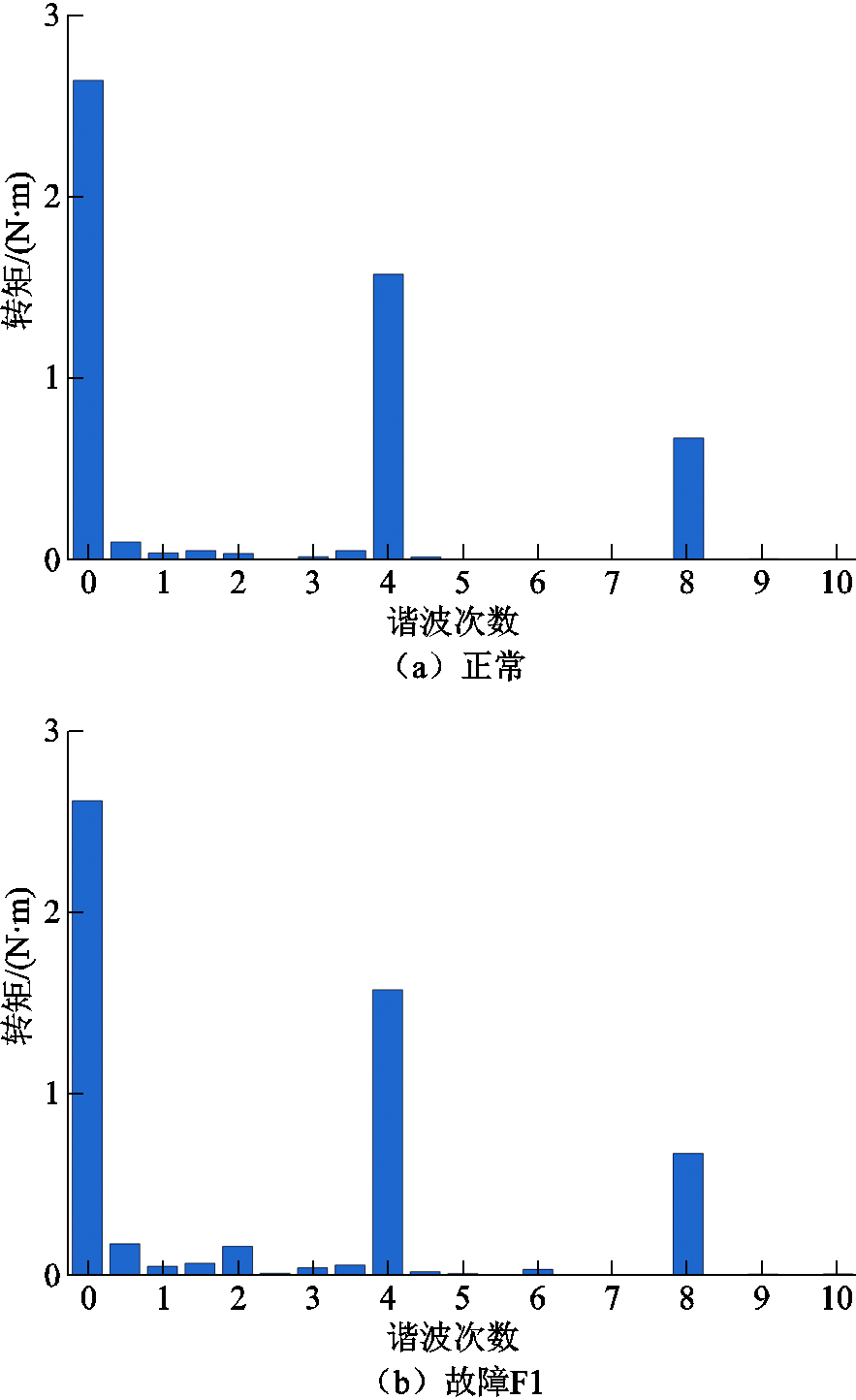
图7 正常和故障F1时的转矩频谱图
Fig.7 Torque spectrum under normal and fault F1 conditions
综上所述,当DSEM发生匝间短路故障时,故障使得电流四相幅值大小不等,导致电机的转矩产生4k次以外的转矩谐波。转矩的变化会直接引起振动的变化,四相电流幅值和电机振动信号将被用作故障诊断特征量。
智能算法在电机故障诊断领域具有良好的应用前景。本文提出了一种机电信号融合的故障诊断方法。该方法分别利用多分类SVM和改进CNN来检测电流幅值信号和振动信号,利用D-S证据理论将两者故障判断结果进行融合,得到融合后的故障概率,从而实现匝间短路故障的最终诊断。该方法结合了两种不同类型的物理信号,能显著增加故障诊断的准确率,提高抗干扰能力,避免因匝数小、传感器故障、受外界干扰等问题导致错判。
四相基频电流幅值的获取需要对几个周期内的电流信号进行分解,且仅产生一个数据,这就决定了样本的数量不会太多,SVM在数据数量较少时效用高成本低;四相幅值信息是四维数据,符合SVM适合处理小样本、多维度非线性分类问题的特点,且在引入后验概率后可以进一步分析分类结果,并为D-S证据融合提供方便。因此选用SVM处理DSEM四相电流基波幅值数据。
SVM是一种以结构最小化原理为基础的模式识别理论。其核心思想是将低维的数据输入,然后将输入空间的数据映射到高维的空间,划分超平面边界后,创造出一个全局最优的划分间隔,使得原本非线性不可分的样本变得线性可分[27]。
对于二分类问题的数据,假设样本的数据集为(xi,yi),i=1,2, ,n,yi∈{-1,1},xi∈R。那么SVM的求解过程变为求解凸二次规划问题,即
,n,yi∈{-1,1},xi∈R。那么SVM的求解过程变为求解凸二次规划问题,即
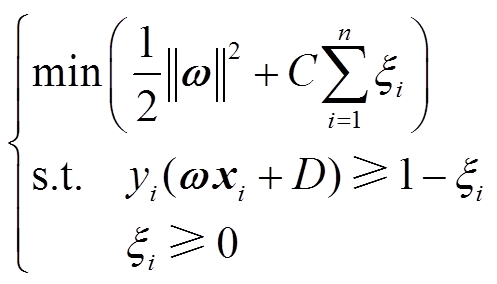 (13)
(13)
式中,w为权重向量;C为惩罚系数;xi为松弛变量;D为偏执因子。将此优化问题用拉格朗日法转换为对偶形式,有
 (14)
(14)
式中,si为拉格朗日乘子。接着求解最优的拉格朗日乘子,构造出最优的分类函数,并推广到非线性问题。
 (15)
(15)
式中,K(xi,x)为泛函数理论中满足Mercer条件的核函数。
SVM的后验概率输出为
 (16)
(16)
式中,H和G为特征参数,可以由最大似然估计准则求出。推广到多分类问题,本文采用一对一的算法,后验概率的求取可以转换为多个二分类问题,进而求出多分类后验概率,即
 (17)
(17)
式中,puv(u v; x)为在u和v两分类器中,样本x属于u类的概率;M为类别总数。
v; x)为在u和v两分类器中,样本x属于u类的概率;M为类别总数。
振动信号在采集频率较高时,输出的数据维度高、数量大,DSEM发生故障时,其振动信号具有复杂的故障特征,包含了丰富的径向力特征信息,因此需要用大数据、高维度、深度学习的处理方法。CNN作为一种深度结构的前馈神经网络,可以学习数据的深层特征,适合处理数据多、维度大的数据;并且在拥有一定规模的数据进行训练并建立模型后,后续的测试数据可以直接利用建立好的模型进行分类诊断,因此诊断效率高,适合作为振动信号的诊断方法。CNN具有多层隐藏层,可以将输入的数据分层学习。传统CNN一般主要由三个代表性的层组成,分别是卷积层、池化层和全连接层。
卷积层主要是由卷积核对数据进行扫描特征,卷积核是权重共享的,因此在向前传递的过程中,卷积核与前一层输入量进行卷积,由此产生一系列的特征向量。卷积的过程可以表示为[28]
 (18)
(18)
 (19)
(19)
式中,*为卷积运算符号;g为激活函数,通常用ReLU作为激活函数;kl i∈RO×P×Q代表卷积核,O为卷积核的数量,P和Q分别为卷积核的宽度和长度,由于输入的振动信号是一维信号,因此Q=1;bl i为第l层中第i个偏差向量;xl i为第l层中第i个输出特征;xl−1为l−1层中的特征向量。
在经过了卷积层后,得到的特征会被输入到池化层中进行下采样操作。下采样可以是最大采样或者是平均采样,本文运用的是最大采样。最大采样可以在保持原有特征的条件下,降低特征的分辨率,减小特征向量的大小。池化的过程可以表示为
 (20)
(20)
式中,Pmax代表池化层最大采样操作;W为池化区域;pl i为l层池化层输出的特征向量。
CNN可以建立若干层卷积层以及池化层,通过交替叠加卷积层和池化层的操作,最终将学习的特征值拉伸成一个向量。本文建立了三层CNN。
在从卷积层和池化层获得足够的特征向量之后,利用全连接层来组合所有的特征,该层中每一个单位都连接到前一层的所有单位。最后利用Softmax进行分类预测,全连接层输出的过程为
 (21)
(21)
 (22)
(22)
式中,ul为卷积层l的线性输出;wl为在卷积层l的权重矩阵;bl为卷积层l的偏差向量。
为防止高卷积层而带来的过拟合影响,本文对dropout参数进行优化,寻找最优的dropout参数。
dropout是一项防止CNN过拟合的技术,将其放置在全连接层。它在神经网络训练时,将一部分神经元按照一定概率从神经网络中舍去,从而提高模型的泛化能力及鲁棒性。改进后的CNN诊断过程的具体步骤如下:
(1)初始化训练集及测试集,初始化CNN训练模型。
(2)将训练集输入网络进行正向传播计算,经过三层卷积网络求取误差。
(3)利用反向传播将步骤(2)求得的误差传播到各个卷积核中,改变其中的权值,不断地对于模型权重进行优化。
(4)重返步骤(2)和步骤(3)直至收敛。从而得到最小的损失函数。
(5)将dropout的值计为第k次dropout。逐步减小dropout参数的大小,循环步骤(2)~(4),直到k+1、k+2、k+3次的模型训练准确率都小于k次的时,输出第k次训练模型。
(6)将测试集用于第k次训练的模型中进行诊断。
(7)输出诊断结果。
在得到改进后的CNN以及SVM的诊断结果后,需要一种先进的信息融合算法将两者诊断相结果结合,从而实现机电信号融合的目的。D-S证据理论引入了信用函数,可区分不确定性的差异。因此将其引用到故障诊断方法中[29]。
对于同一个识别框架下不同的事件,通过不同特征得到的基本概率分配函数为m1和m2,其对应的事件分别是m和n,此时由D-S理论的规则,将多种基本概率分配函数组合成正交和t,有
 (23)
(23)
 (24)
(24)
式中,h为冲突因子,需保证h<1;j为事件u和v相交的非空交集。
本文所用的基于机器学习的多源融合故障诊断方法如图8所示。整个诊断方法分为SVM和CNN两个部分,SVM用于处理电流信号,CNN用于识别振动信号。
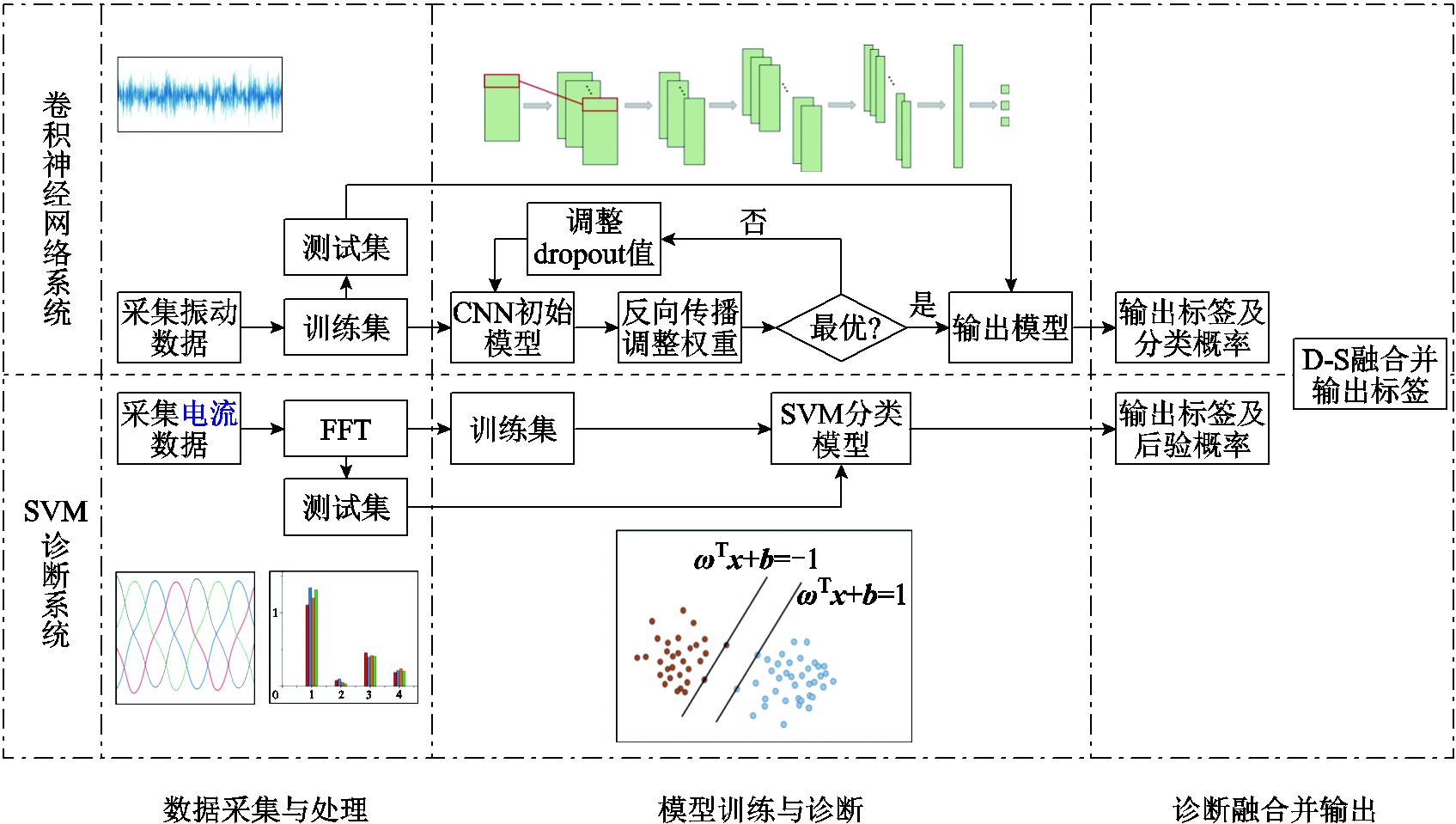
图8 机电信号融合故障诊断流程
Fig.8 Flow chart offault diagnosis method based on mechanical and electrical signal fusion
在下半部分中,电机电流时域信号被采集后经过FFT转换为频域信号;接着电流基频幅值被送入SVM进行模型分类训练;最后将测试集送入模型中,输出诊断结果。
同时,在上半部分CNN中,电机的振动信号被分为训练集和测试集。将训练集送入初始化的三层CNN中,经过卷积层、池化层和全连接层后,利用反向传播,不断地调整网络训练的权重参数,使得损失函数达到最小;然后利用循环网络逐步减小dropout的值直到达到最优的训练模型;最后将输出模型用于测试,并输出诊断结果。
该方法结合了两种先进诊断方法的优势,其各自的诊断结果最后通过D-S证据理论进行融合计算,使得诊断准确率进一步提升。
单一信号源的诊断方法在故障诊断上有明显的局限性。本文所提出的诊断方法利用电流和振动信号实现了多源信号和机电信号融合,解决了两大问题:①单一信号源诊断方法因运行状态和信号干扰导致误判的问题,②单一信号源方法难以对DSEM匝间短路,特别是小匝数短路的准确识别问题。
为了验证本文所提出的融合故障诊断方法的有效性,在实验室的DSEM测试平台上进行实验,实验平台如图9所示。电机参数见表1。平台利用原动机带动DSEM进行全桥不控整流发电,将振动传感器吸附于电机外壳上,电流传感器测量电流的位置在DSEM和功率变换器之间,电流信号由电流传感器检测,输出至示波器显示,并通过板卡采集。

图9 DSEM故障诊断实验平台
Fig.9 Experiment platform of DSEM fault diagnosis
表1 DSEM基本参数
Tab.1 Basic parameters of DSEM

参数数值参数数值 定转子极数8/10每相绕组匝数80 转速/(r/min)800~1 000每相电阻/Ω0.3 叠片长度/mm90气隙/mm0.5
本实验的励磁电流为10A,为了体现诊断方法的鲁棒性,电机运行在800r/min、1 000r/min、 1 200r/min三种转速下;负载分别选择0.5Ω、1Ω、和5Ω下;接线分为正常、A相发生故障F1、AB相发生故障F2三种;实验在共计27种不同工况下运行,保证诊断方法不会因运行状态的变化而导致诊断失效。由于CNN是大数据学习的一种,为了保证CNN的模型准确性,必须采集大量的振动信号用于训练,因此每种工况采集100组数据,总计2 700组数据,每组数据包含了一条四相电流幅值信息及10条长度为1 000的振动信号。最后从中抽取100组作为测试集。
DSEM在1 000r/min、负载电阻1Ω时,三种状况下的某三组电流基频幅值及振动实验数据如图10和图11所示。由图中可以看出,电流在故障F2时,基频幅值不对称程度较大,而在故障F1时,难以区分。振动数据在三种状况下的特征难以直观辨别,需要利用CNN进行高维学习,将电流数据及振动数据利用融合算法诊断后,最终部分测试结果见表2。
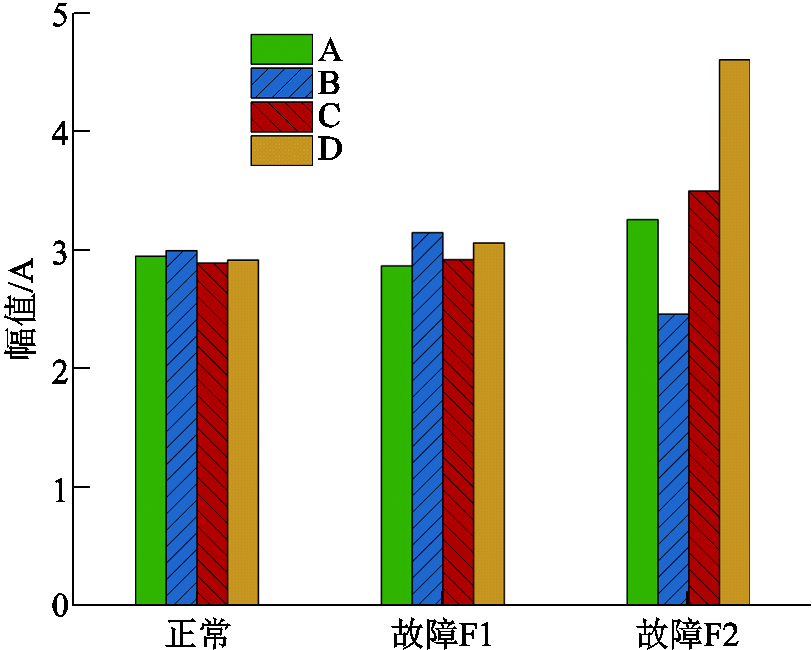
图10 正常和故障状态下四相电流基频幅值
Fig.10 Fundamental harmonic of four-phase current under normal and fault conditions
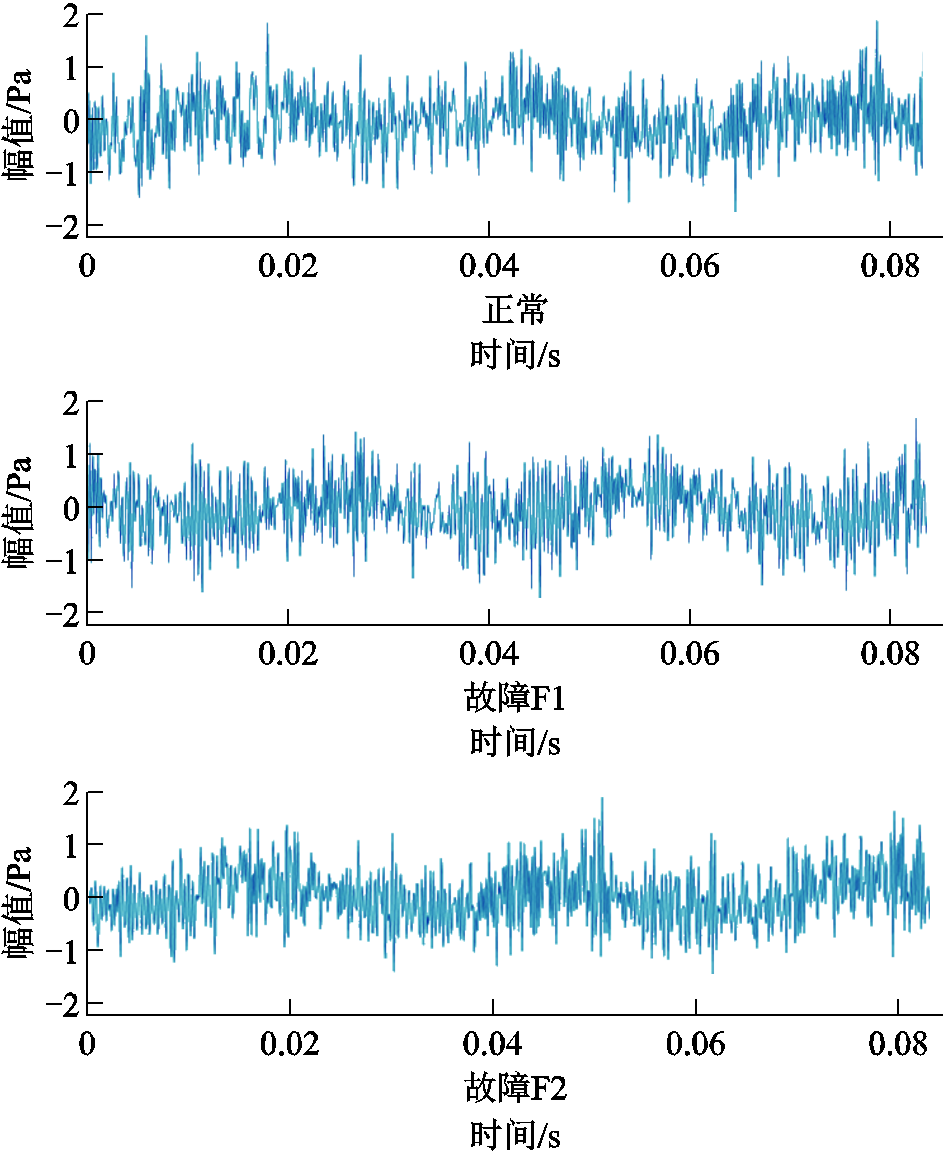
图11 正常和故障状态下振动时域图
Fig.11 Time domain diagram of vibration under normal and fault conditions
表2 样本数据
Tab.2 Sample data

SVM预测概率及标签CNN预测概率及标签融合后预测概率及标签实际 012预测012预测012预测 0.6740.3230.00300.5380.4480.01400.7150.2850.00000 0.6770.3200.00300.8530.1450.00100.9250.0750.00000
(续)
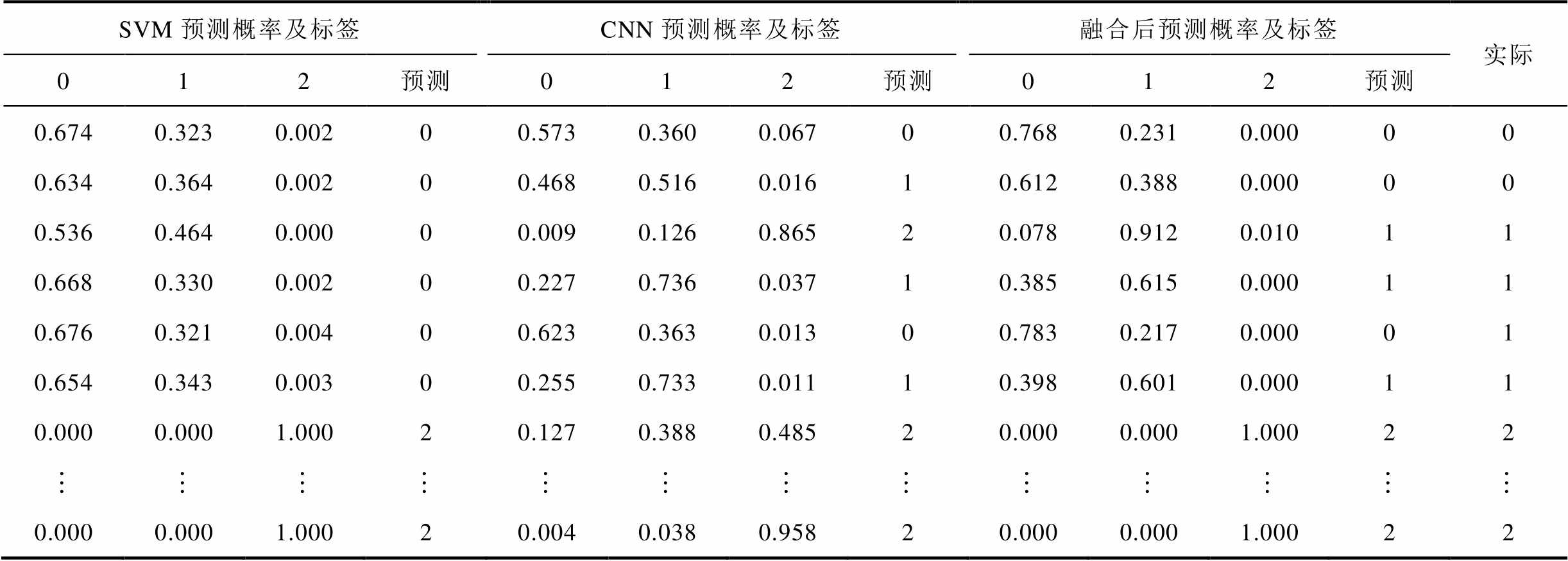
SVM预测概率及标签CNN预测概率及标签融合后预测概率及标签实际 012预测012预测012预测 0.6740.3230.00200.5730.3600.06700.7680.2310.00000 0.6340.3640.00200.4680.5160.01610.6120.3880.00000 0.5360.4640.00000.0090.1260.86520.0780.9120.01011 0.6680.3300.00200.2270.7360.03710.3850.6150.00011 0.6760.3210.00400.6230.3630.01300.7830.2170.00001 0.6540.3430.00300.2550.7330.01110.3980.6010.00011 0.0000.0001.00020.1270.3880.48520.0000.0001.00022 0.0000.0001.00020.0040.0380.95820.0000.0001.00022
表2中标签0、1、2分别代表正常,故障F1、故障F2三种不同状态。从表2中可以看到,单独使用SVM进行的故障诊断实验在实际运用中有较大的局限性。在三种故障的准确率对比中发现SVM对于故障F2诊断灵敏度很高,而对于正常和故障F1的识别准确率低下。这是因为DSEM的容错性能较好,在输出电流较大时(负载电阻小),小匝数的故障F1对磁场的影响较小,四相基频电流的幅值差值并不大,导致故障F1和正常的四相电流幅值差值难以分辨。
不同负载下正常和故障状态的不平衡系数如图12所示。可知,在负载电阻较小时,电机正常时和故障F1时的幅值不平衡系数S几乎相等,这说明DSEM在此负载下即使发生故障F1,四相电流的基频幅值也几乎没有差异。所以由电流幅值信号作为输入的SVM单信号源的诊断方法难以精确识别正常和故障F1。为了更加直观地进行说明,将随机抽出的100组测试集SVM诊断结果单独列出,并将结果按照不平衡系数大小升序排列后得到附表1。从附表1中可以看出,排在前面不平衡系数较小的数据几乎都会被诊断为正常,故障F1的数据包含了负载电阻较小和负载电阻较大的情况,因而其不平衡系数有大有小,不平衡系数偏大的可以被正确诊断,而偏小的就被误判为正常运行状态;对不平衡系数偏大的故障F2,SVM的诊断灵敏度和诊断的准确率都高。
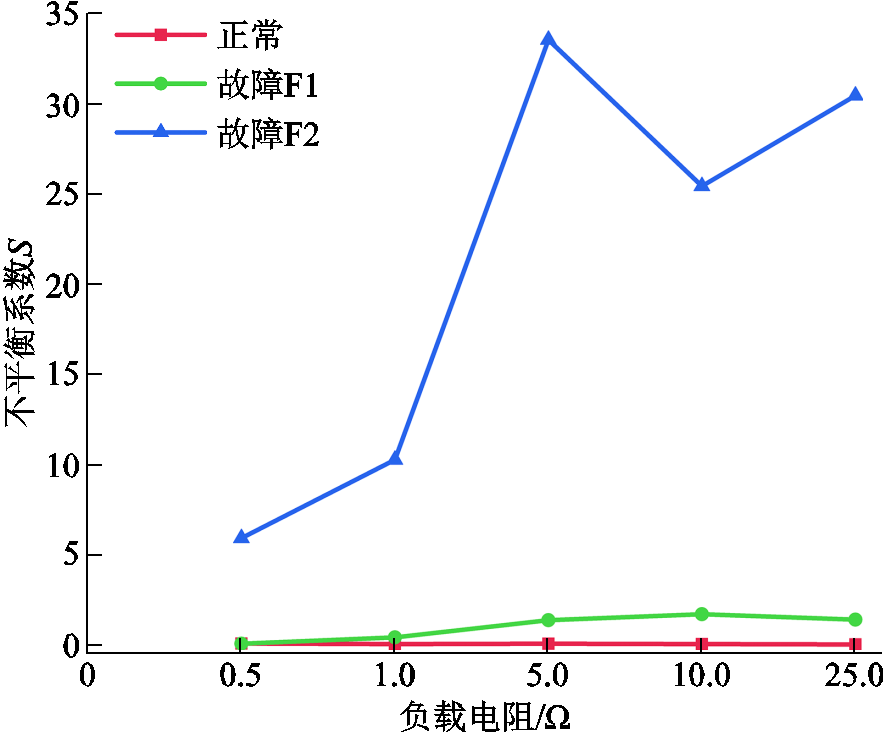
图12 不同负载下正常和故障状态的不平衡系数
Fig.12 Unbalanced coefficient with different loads under normal and fault conditions
因此,必须引入新的故障诊断量来进一步提高故障诊断准确率。CNN所检测的振动信号可以弥补单信号源诊断的不足,本实验所用的改进CNN可以自我寻求最优的dropout参数。按照经验,dropout值不得超过0.7,因此实验设置dropout从0.7开始,按照步长0.05递减寻优。在0.25时训练达到91%的准确率,且后面三次的实验所得准确率都低于dropout参数为0.25时的准确率,循环停止,即网络最优dropout为0.25,dropout最优参数的求取过程如图13所示。
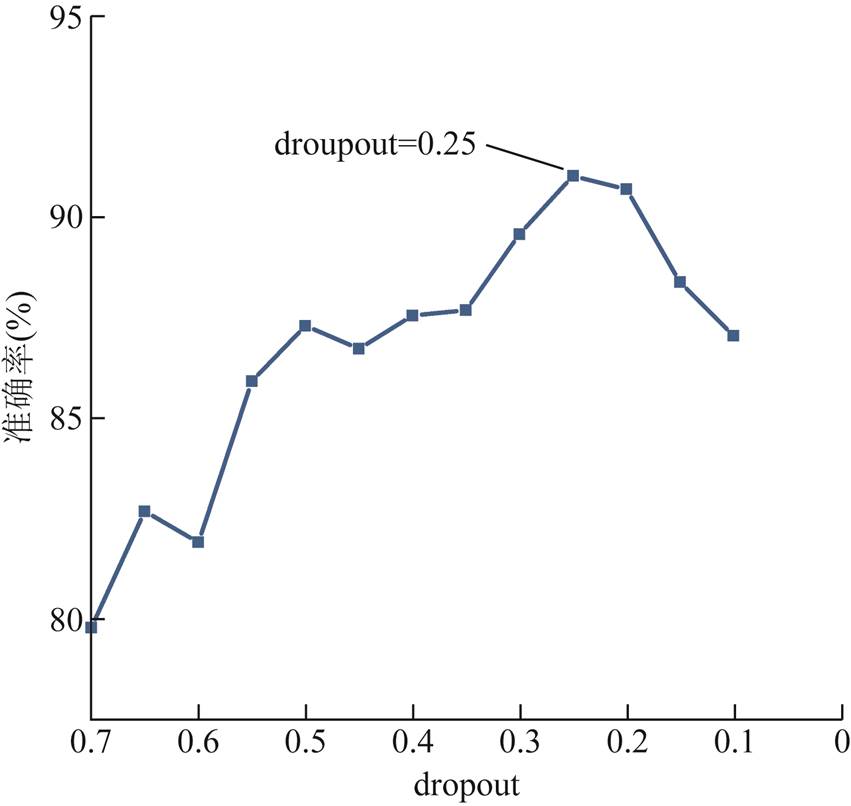
图13 参数寻优过程
Fig.13 Parameter optimization process
模型训练损失率及分类准确率如图14所示。图14是CNN在最优dropout参数下的训练过程,在循环40次后,损失值不断下降,训练准确率稳定在91%附近。
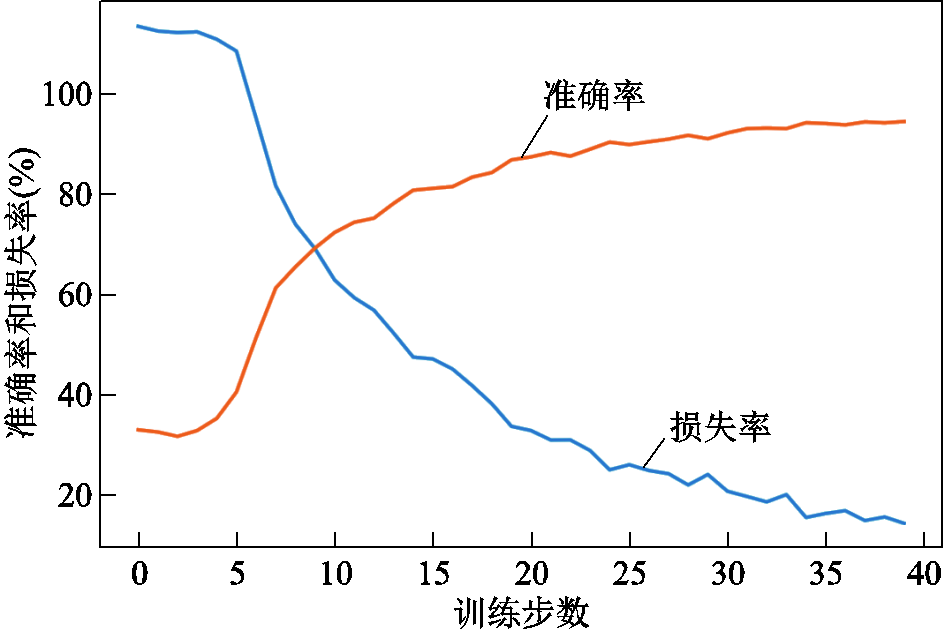
图14 模型训练损失率及分类准确率
Fig.14 Model loss and classification accuracy
对输入数据以及全连接层的数据降维后可视化的结果如图15所示。从图15中可以看到,数据在输入层相对集中,特征没有很好地分离,同类的分布差异较大。经过CNN训练,在全连接层的数据特征被分离开,但有少量数据没有完全分离。可见CNN对于振动数据诊断效果较好,但仍然有数据无法正确诊断。
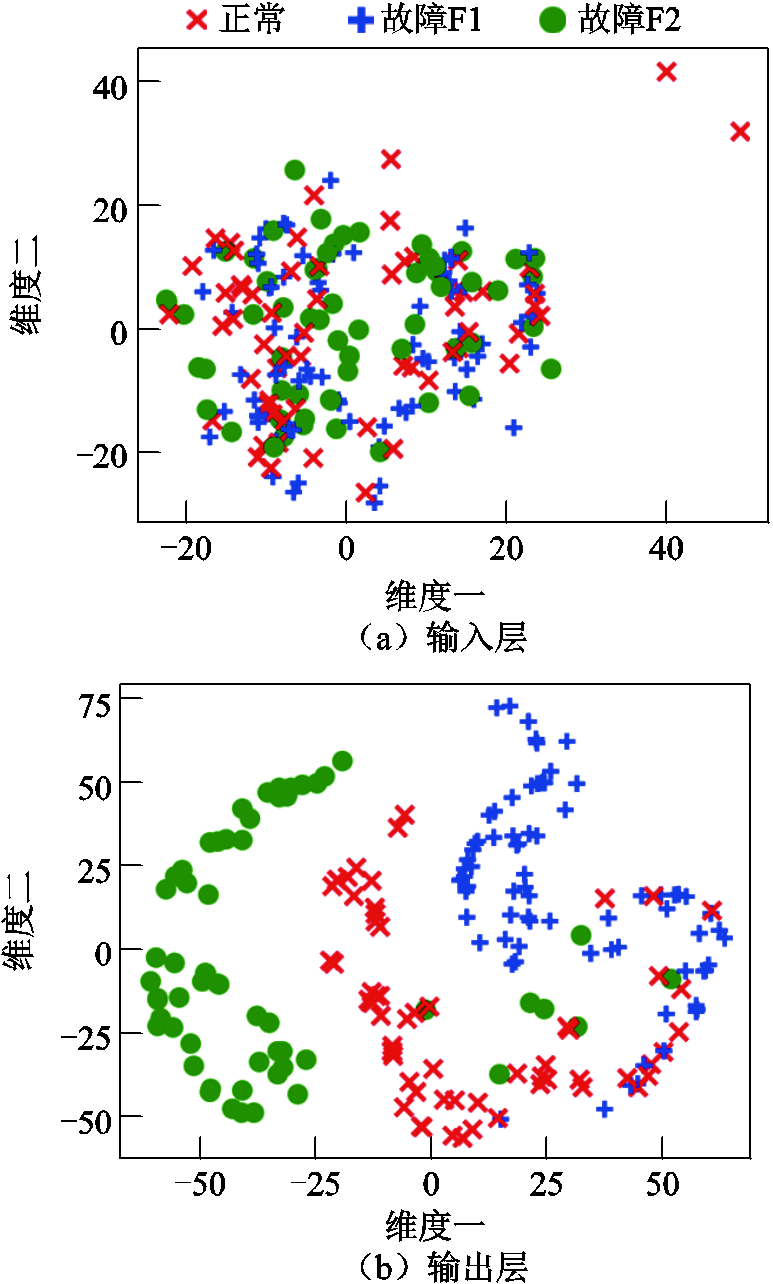
图15 CNN数据可视化结果
Fig.15 Visual results of CNN data
卷积神经网络以及融合后的诊断结果同样在表2中。当两个单源方法诊断结果不一致时,以表2中第六条测试集为例,测试集发生了故障F1,单用SVM的单信号源诊断方法发生了误判,判定为正常的概率为0.668左右,而判定为故障F1的概率为0.33左右;利用振动信号作为输入的卷积神经网络方法判定为正常的概率为0.227,而判定为故障F1的概率为0.736;两者在判断结果不一致的情况下利用D-S证据理论融合后得到了正确的诊断结果。而当两个单源方法诊断结果都正确时,融合后可以输出正确标签且概率会更高。因此本文所提出的多源信号的融合诊断方法相较于单一信号源方法具有更高的准确性和鲁棒性。
SVM、CNN及融合故障诊断的混淆矩阵如图16所示。由混淆矩阵同样可以看出融合故障诊断的优越性,SVM混淆矩阵的真实标签为正常时,多数可以被正确诊断为正常状态;真实标签为故障F1时,被正确诊断的概率偏低;真实标签为故障F2时诊断准确率极高。
CNN对三种运行状态的诊断都有比较可观的准确率。由于D-S理论具有不确定性推理能力和集群效应,因而SVM对于故障F2的高准确性可以在融合后得以保留。同样,CNN对于故障F1的有效识别在经过融合后准确率也有所提升。由此可以看出,融合故障诊断对两个单信号故障诊断方法进行了优势互补。
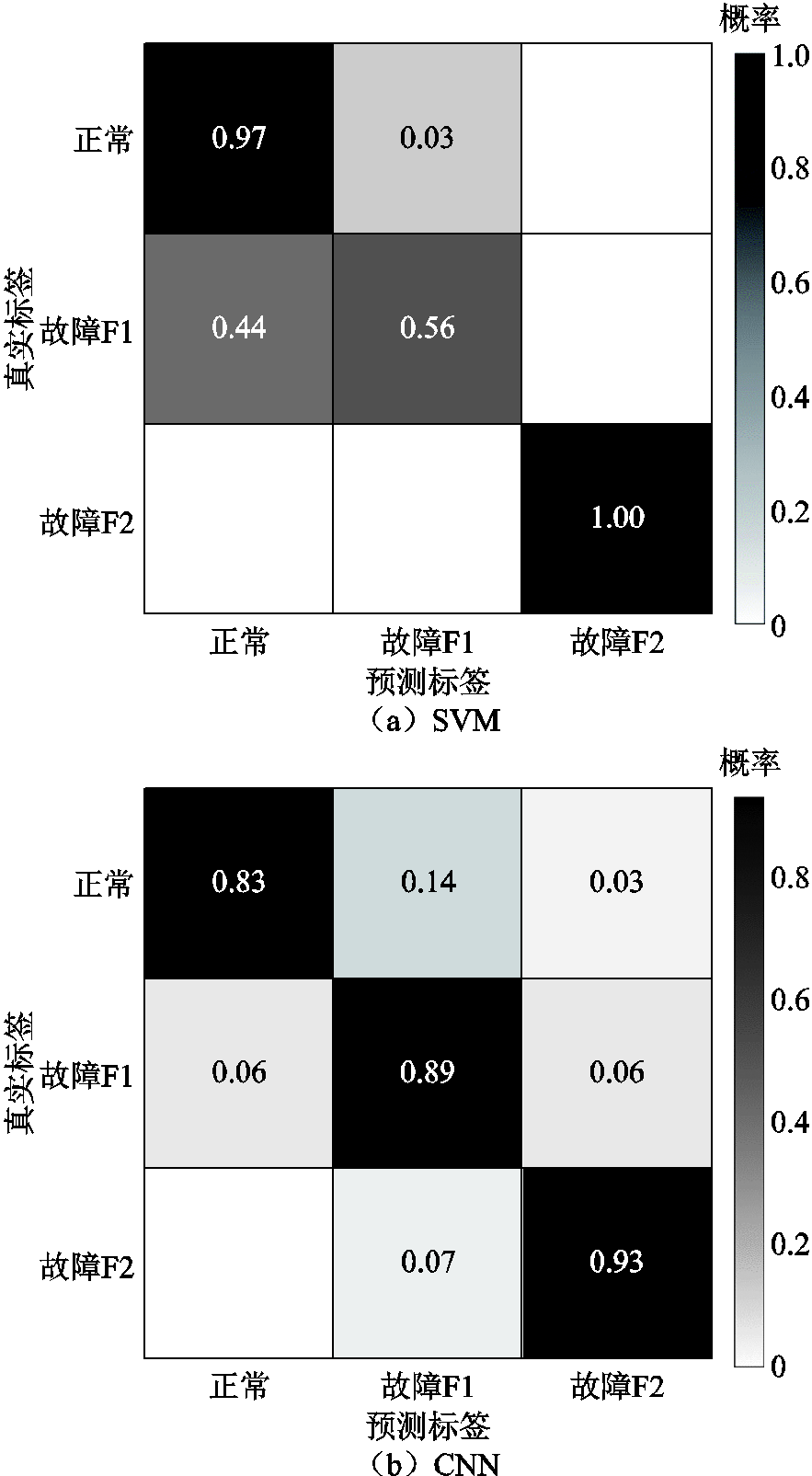
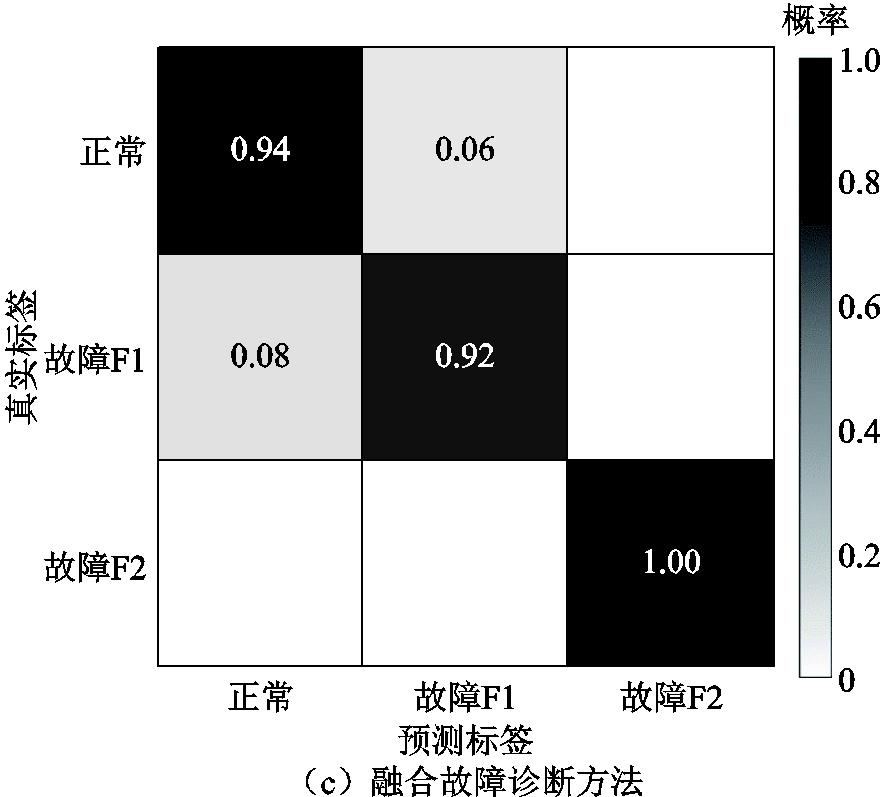
图16 不同诊断方法的混淆矩阵
Fig.16 Confusion matrix of different method
测试的100组测试集在通过两种单源信号诊断方法及机电信号融合故障方法后的判定准确率见表3。可知,本文提出的机电信号融合故障诊断方法的准确率高达95%,相较于单一信号源的故障诊断方法可靠性强,诊断可信度高,抗干扰能力强,对DSEM匝间短路故障诊断的研究具有一定的意义,满足了实际工程运用的要求,具有良好的应用前景。
表3 故障诊断准确率对比
Tab.3 Precision rate comparisons of fault diagnosis

诊断方法实验次数正确次数准确率(%) SVM1008383 卷积神经网络1008888 融合故障诊断1009595
本文设计了一种基于机器学习的多源信号融合故障诊断方法,总结理论分析及实验结果后得到如下结论:
1)DSEM发生匝间短路故障时,四相电流的基频幅值将不再对称,其差值将变大;而电磁转矩将产生 次谐波以外的转矩谐波,进而使得故障的振动信号发生变化。
次谐波以外的转矩谐波,进而使得故障的振动信号发生变化。
2)本文对多源信号融合诊断方法中的CNN进行改进,可以寻得最优的dropout参数,在保证神经网络训练成功率的同时,防止网络过拟合。
3)本文设计的多源信号融合故障诊断方法可以将两个单信号故障诊断量进行优势互补,大大提高故障诊断准确率,具有良好的鲁棒性和准确性。
附表1 SVM测试集诊断情况
App.Tab.1 The diagnosis results of SVM test data

四相基波幅值/ASVM状态预测概率不平衡系数预测标签实际标签 ABCD012 2.2172.2922.2422.1950.8780.1210.0010.02100 2.9263.0362.9642.9550.6500.3490.0010.02600 3.0683.1743.0823.0860.6770.3200.0030.02800 3.0573.1693.0493.0730.6680.3300.0020.03701 3.0653.1823.0663.0770.6680.3300.0020.03801 2.9293.0582.9512.9610.6310.3680.0010.03900 1.9082.0291.9081.9580.7860.2090.0050.04000 2.1162.2332.1132.1840.8300.1680.0010.04000 2.2052.3272.2082.2760.8230.1760.0010.04100 1.8922.0011.8781.9690.7750.2200.0050.04300 2.9053.0442.9362.9470.6160.3830.0010.04300 3.0943.2153.0883.1030.6740.3230.0030.04400 1.9382.0511.9232.0120.7940.2020.0040.04500 3.0403.1833.0763.0790.6340.3640.0020.04500 3.0763.1993.0783.0740.6740.3230.0020.04600 3.1103.2383.1153.1170.6760.3210.0030.04600 1.9202.0351.9031.9980.7840.2120.0050.04700
(续)

四相基波幅值/ASVM状态预测概率不平衡系数预测标签实际标签 ABCD012 2.2032.3322.1992.2710.8200.1790.0010.04800 3.0723.2133.0983.0870.6540.3430.0030.05001 3.1263.2613.1323.1340.6760.3210.0040.05101 3.1143.2513.1193.1270.6680.3290.0030.05200 2.9662.9593.0632.9040.7870.2110.0020.05200 3.1983.3323.2023.2010.7050.2880.0070.05200 3.1443.2863.1603.1630.6730.3220.0050.05200 3.2103.3333.1963.1950.7210.2720.0070.05300 2.1432.2902.1582.2230.8050.1930.0010.05400 3.1163.2653.1273.1620.6450.3510.0040.05501 3.1073.2453.1023.1160.6660.3310.0030.05600 3.1183.2523.1143.1140.6770.3200.0030.05600 3.2153.3443.2003.2040.7170.2760.0070.05800 3.1543.2813.1373.1350.6990.2970.0040.05900 2.9393.0952.9542.9890.5960.4030.0010.05900 2.9932.9493.0632.8900.8240.1740.0020.06400 3.1913.3413.2003.1950.6930.3000.0070.06400 3.2003.3393.1883.1880.7070.2870.0060.06500 3.1693.3123.1503.1810.6800.3150.0050.06501 2.1572.3342.2222.2680.7650.2340.0010.06600 3.1243.2873.1383.1590.6430.3530.0040.06701 3.1173.2793.1283.1540.6400.3570.0040.06701 3.2483.3823.2263.2220.7310.2600.0090.07000 3.1913.3493.1943.2060.3110.6820.0070.07001 3.1813.3423.1823.2020.5730.4210.0060.07201 3.2063.3613.2003.2070.6950.2980.0070.07401 3.1893.3503.1873.2040.6780.3160.0060.07401 2.9703.0902.8892.9260.6770.3230.0010.09100 2.8753.0282.8322.9810.5630.4370.0010.09901 2.8703.0432.8442.9860.5360.4640.0010.10701 2.8753.0512.8262.9650.5480.4510.0010.11901 2.8633.0512.8052.9920.5120.4880.0010.15401 2.9133.1672.9603.0960.4240.5750.0010.16611 2.9093.1772.9573.0860.4130.5870.0010.17811 2.8613.0752.8243.0500.4450.5540.0010.19710 2.9043.1812.9343.0740.4050.5940.0010.19911 2.9043.1752.9263.0930.3990.6010.0010.20611 2.1232.3752.1082.2980.6720.3270.0010.20800 2.1222.3742.0912.2920.6750.3240.0010.22100 2.8863.2503.0183.1450.2940.7050.0010.29811 2.8613.2252.9923.1300.2830.7160.0010.30411 2.8803.2443.0123.1480.2870.7120.0010.30411 2.8753.2413.0033.1400.2860.7130.0010.30611 1.5652.1131.7331.9900.1400.8530.0070.73511 1.4942.1271.7481.9820.0880.9060.0070.92211
(续)

四相基波幅值/ASVM状态预测概率不平衡系数预测标签实际标签 ABCD012 1.4842.1401.7472.0050.0760.9180.0071.01111 1.4002.1521.7762.0100.0430.9500.0071.29511 1.7812.4852.0552.4670.0660.9330.0011.39511 1.7692.4772.0562.4640.0630.9360.0011.41211 1.7552.4692.0322.4570.0610.9380.0011.45111 1.7802.4942.0612.4870.0600.9390.0011.45711 1.5512.3151.8332.2440.0440.9520.0041.55111 1.5572.3361.8372.3000.0380.9580.0041.70411 1.5742.3171.8342.3500.0410.9550.0041.72211 1.5342.3641.8202.2890.0300.9660.0041.86111 3.4353.0013.4594.0430.0370.0220.9402.19422 3.4052.9353.4884.1160.0200.0130.9672.82822 3.4342.9273.4924.1530.0150.0090.9763.03822 3.2992.7473.4904.2970.0070.0060.9884.94222 3.3012.6973.4764.3390.0050.0040.9905.51722 3.2852.6893.5264.3680.0040.0030.9935.81522 3.3042.6753.4914.3840.0040.0030.9935.98022 3.2802.6593.5264.4120.0030.0030.9956.33322 3.2772.6533.5204.4110.0030.0030.9956.37022 3.2782.6233.4704.4320.0030.0030.9946.71022 3.2342.4343.4764.5920.0000.0001.0009.53322 3.2372.4303.4154.5980.0020.0010.9979.60022 3.2152.4113.4634.6000.0000.0001.0009.82022 3.2172.4043.4584.6160.0000.0001.00010.02322 3.2202.3353.4034.6420.0000.0001.00010.83922 3.1572.0953.3314.8720.0000.0001.00015.71522 3.1211.9193.3144.9820.0000.0001.00019.05122 3.1271.9263.3025.0060.0000.0001.00019.29322 2.9160.9252.9255.7790.0000.0001.00047.86322 2.9100.9092.9125.7900.0000.0001.00048.41722 2.9000.9002.8835.8070.0020.0020.99749.00322 2.9080.8822.9225.8170.0000.0001.00049.46622 2.7880.6672.6525.9140.0050.0050.99056.40322 2.7750.6852.6125.9250.0060.0060.98956.46822 2.8270.6672.7055.9590.0040.0040.99257.24422 2.6050.6542.3655.9280.0170.0150.96858.35022 2.5880.6532.3415.9600.0190.0160.96559.27422 2.6370.6202.4125.9640.0130.0130.97459.57522
参考文献
[1] Wang Kaimiao, Zhou Bo, Zhou Xingwei, et al. The output voltage control strategy for DSEG with controlled rectification based on conduction angle estimation[J]. IEEE Transactions on Industrial Electronics, 2020, 67(5): 3350-3360.
[2] 赵星, 周波, 史立伟. 一种新型低转矩脉动电励磁双凸极无刷直流电机[J]. 中国电机工程学报, 2016, 36(15): 4249-4258.
Zhao Xing, Zhou Bo, Shi Liwei. A novel electro-magnet doubly salient brushless DC motor with minimum torque ripple[J]. Proceedings of the CSEE, 2016, 36(15): 4249-4258.
[3] 沈燚明, 卢琴芬. 初级励磁型永磁直线电机研究现状与展望[J]. 电工技术学报, 2021, 36(11): 2325-2343.
Shen Yiming, Lu Qinfen. Overview of permanent magnet linear machines with primary excitation[J]. Transactions of China Electrotechnical Society, 2021, 36(11): 2325-2343.
[4] 陈云云, 朱孝勇, 全力, 等. 基于参数敏感度的双凸极永磁型双定子电机的优化设计和性能分析[J]. 电工技术学报, 2017, 32(8): 160-168.
Chen Yunyun, Zhu Xiaoyong, Quan Li, et al. Parameter sensitivity optimization design and performance analysis of double-salient permanent-magnet double-stator machine[J]. Transactions of China Electrotechnical Society, 2017, 32(8): 160-168.
[5] 孙林楠, 张卓然, 于立, 等. 定子分布励磁双凸极无刷直流发电机电磁特性研究[J]. 中国电机工程学报, 2017, 37(21): 6218-6226.
Sun Linnan, Zhang Zhuoran, Yu Li, et al. Analysis of electromagnetic performance of doubly salient brushless DC generator with distributed field magnetomotive forces[J]. Proceedings of the CSEE, 2017, 37(21): 6218-6226.
[6] 王瑾, 李岩, 贾建国, 等. 反电动势和凸极率对高效永磁同步磁阻电机稳态特性影响分析[J]. 电工技术学报, 2020, 35(22): 4688-4698.
Wang Jin, Li Yan, Jia Jianguo, et al. Analysis of the influence of back-EMF and saliency ratio on steady-state characteristics of a high efficiency permanent magnet synchronous reluctance motor[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4688-4698.
[7] 卿龙, 王惠民, 葛兴来. 一种高效率开关磁阻电机转矩脉动抑制方法[J]. 电工技术学报, 2020, 35(9): 1912-1920.
Qing Long, Wang Huimin, Ge Xinglai. A high efficiency torque ripple suppression method for switched reluctance motor[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1912-1920.
[8] 胡胜龙, 左曙光, 刘明田. 开关磁阻电机非线性径向电磁力解析建模[J]. 电工技术学报, 2020, 35(6): 1189-1197.
Hu Shenglong, Zuo Shuguang, Liu Mingtian. Analytical modeling of nonlinear radial electromagnetic force in switched reluctance motors[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1189-1197.
[9] Du Longxin, Liu Xiping, Fu Jiesheng, et al. Design and optimization of reverse salient permanent magnet synchronous motor based on controllable leakage flux[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(2): 163-173.
[10] Jiang Xuefeng, Wang Shaoshuai, Li Qiang, et al. Design and optimization of dual-winding fault-tolerant permanent magnet motor[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(1): 45-53.
[11] Gan Chun, Chen Yu, Qu Ronghai, et al. An overview of fault-diagnosis and fault-tolerance techniques for switched reluctance machine systems[J]. IEEE Access, 2019, 7: 174822-174838.
[12] Gan Chun, Wu Jianhua, Yang Shiyou, et al. Wavelet packet decomposition-based fault diagnosis scheme for SRM drives with a single current sensor[J]. IEEE Transactions on Energy Conversion, 2016, 31(1): 303-313.
[13] Wang Bo, Wang Jiabin, Griffo A, et al. Stator turn fault detection by second harmonic in instantaneous power for a triple-redundant fault-tolerant PM drive[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7279-7289.
[14] Qi Yuan, Bostanci E, Zafarani M, et al. Severity estimation of interturn short circuit fault for PMSM[J]. IEEE Transactions on Industrial Electronics, 2019, 66(9): 7260-7269.
[15] Lee S T, Hur J. Detection technique for stator inter-turn faults in BLDC motors based on third-harmonic components of line currents[J]. IEEE Transactions on Industry Applications, 2017, 53(1): 143-150.
[16] Fonseca D S B, Marques Cardoso A J. On-line inter-turn short-circuit fault diagnosis in switched reluctance motors[C]//2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 2019: 198-202.
[17] 夏一文, 张卓然, 张健, 等. 基于反电势电流的电励磁双凸极电机驱动电路单管开路故障诊断研究[J]. 电工技术学报, 2020, 35(23): 4888-4897.
Xia Yiwen, Zhang Zhuoran, Zhang Jian, et al. Research on single power switch open circuit fault diagnosis of doubly salient eletromagnetic motor drive circuit based on the back electromotive force current[J]. Transactions of China Electrotechnical Society, 2020, 35(23): 4888-4897.
[18] 胡朝燕, 周波, 魏佳丹. 双凸极电机全桥变换器单管开路故障在线诊断[J]. 中国电机工程学报, 2009, 29(33): 111-116.
Hu Chaoyan, Zhou Bo, Wei Jiadan. On-line diagnosis of single transistor open-circuit fault in full-bridge converter of doubly salient electro-magnet motor[J]. Proceedings of the CSEE, 2009, 29(33): 111-116.
[19] 崔江, 郭瑞东, 张卓然, 等. 基于改进DBN的发电机旋转整流器故障特征提取技术[J]. 中国电机工程学报, 2020, 40(7): 2369-2376, 2415.
Cui Jiang, Guo Ruidong, Zhang Zhuoran, et al. Generator rotating rectifier fault feature extraction technique based on improved DBN[J]. Proceedings of the CSEE, 2020, 40(7): 2369-2376, 2415.
[20] Liu Ruonan, Wang Fei, Yang Boyuan, et al. Multiscale kernel based residual convolutional neural network for motor fault diagnosis under nonstationary conditions[J]. IEEE Transactions on Industrial Informatics, 2020, 16(6): 3797-3806.
[21] Seshadrinath J, Singh B, Panigrahi B K. Vibration analysis based interturn fault diagnosis in induction machines[J]. IEEE Transactions on Industrial Informatics, 2014, 10(1): 340-350.
[22] Huang Yang, Chen C H, Huang C J. Motor fault detection and feature extraction using RNN-based variational autoencoder[J]. IEEE Access, 2019, 7: 139086-139096.
[23] Hoang D T, Kang H J. A motor current signal-based bearing fault diagnosis using deep learning and information fusion[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(6): 3325-3333.
[24] 施耀华, 冯延晖, 任铭, 等. 融合电流和振动信号的永磁同步风电系统变流器故障诊断方法研究[J]. 中国电机工程学报, 2020, 40(23): 7750-7760.
Shi Yaohua, Feng Yanhui, Ren Ming, et al. Study on fault diagnosis method of converter in permanent magnet synchronous wind power system by fusion of current and vibration signals[J]. Proceedings of the CSEE, 2020, 40(23): 7750-7760.
[25] Liao Y, Liang F, Lipo T A. A novel permanent magnet motor with doubly salient structure[C]//Conference Record of the 1992 IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 2002: 308-314.
[26] Zhu Z Q, Lee B, Huang Liren, et al. Contribution of current harmonics to average torque and torque ripple in switched reluctance machines[J]. IEEE Transactions on Magnetics, 2017, 53(3): 1-9.
[27] 王栋悦, 谷怀广, 魏书荣, 等. 基于机电信号融合的DFIG定子绕组匝间短路故障诊断[J]. 电力系统自动化, 2020, 44(9): 171-178.
Wang Dongyue, Gu Huaiguang, Wei Shurong, et al. Diagnosis of inter-turn short-circuit fault in stator windings of DFIG based on mechanical and electrical signal fusion[J]. Automation of Electric Power Systems, 2020, 44(9): 171-178.
[28] Shao Siyu, Yan Ruqiang, Lu Yadong, et al. DCNN-based multi-signal induction motor fault diagnosis[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(6): 2658-2669.
[29] 李永刚, 王罗, 李俊卿, 等. 基于多源信息融合的同步发电机转子绕组匝间短路故障识别[J]. 电力系统自动化, 2019, 43(16): 162-167, 191.
Li Yonggang, Wang Luo, Li Junqing, et al. Identification of inter-turn short-circuit fault in rotor windings of synchronous generator based on multi-source information fusion[J]. Automation of Electric Power Systems, 2019, 43(16): 162-167, 191.
Abstract Stator winding inter-turn short-circuit fault is a frequent failure on doubly salient electro-magnetic machine (DSEM). It is difficult to identify the fault accurately by the single fault characteristic because of the less influence by fault windings on the electromagnetic field. Failure to detect a fault condition at an early stage of fault will pose a huge threat to the entire motor system. This paper proposes a comprehensive short-circuit fault diagnosis method for DSEM based on mechanical and electrical signal fusion. The short-circuit fault can be identified effectively by analyzing the structure of the machine and the extraction mechanism of its fault features.
Firstly, the mathematical model of distributed excitation DSEM was established to analyze the changes of current and vibration signals in healthy and fault states, and the extraction mechanism of current fundamental frequency amplitude and vibration signals was studied and adopted for motor fault diagnosis. Secondly, when the inter-turn short-circuit fault occurs, according to the characteristics of current and vibration signals, the current signals are input into SVM and the vibration signals are input into the improved CNN model to obtain fault probability under. Finally, the classification fault diagnosis results of multi-source signals are obtained by using the evidence combination rule of D-S evidence theory. In this integrated model, the problem of low accuracy of single-source diagnosis method is solved, and the model has good reliability, complementarity and high-accuracy.
The results of the experiments conducted on the DSEM platform show that the fault diagnosis experiments using SVM alone are relatively limited in practice, making it difficult to distinguish between faults with small imbalance coefficients and normal conditions. Correspondingly, the SVM is very sensitive to diagnose faults with larger imbalance coefficients and has a high diagnostic accuracy. The vibration signal detected by CNN can make up for the lack of single-source diagnosis. CNN has a relatively impressive accuracy in diagnosing all three operational states. For example, when the fault F1 occurred, the single-source diagnosis method using SVM alone was misjudged, with a probability of 0.668 for normal and 0.33 for fault F1. The CNN method using the vibration signal as input has a probability of 0.227 for normal and 0.736 for fault F1. And the correct diagnostic result is obtained by fusing the two methods using D-S evidence theory in case of inconsistent results. When the diagnosis results of both single-source methods are correct, the fusion can output the correct label with higher probability. From the 100 test sets, the accuracy of the proposed method reaches 95%, which is more reliable, more credible and more robust than the fault diagnosis methods based on single signal.
The following conclusions can be drawn from the experimental analysis:①When the inter-turn short-circuit fault occurs in the DSEM, the fundamental frequency amplitude of the four-phase current will no longer be symmetrical and the difference will be larger. The electromagnetic torque will generate torque harmonics of the 4kth harmonic, which will cause the vibration signal of the fault to change. ②The CNN network in the multi-source signal fusion diagnosis method is improved to find the optimal dropout parameters, which can ensure the success rate of neural network training and prevent the network from overfitting. ③The proposed multi-source signal fusion fault diagnosis method can complement the advantages of two single-signal fault diagnosis methods, and greatly improve the fault diagnosis accuracy with good robustness and accuracy.
Keywords: Doubly salient electro-magnetic machine, short-circuit fault, mechanical and electrical signal fusion, convolution neural network, support vector machine
DOI:10.19595/j.cnki.1000-6753.tces.211042
中图分类号:TM352
赵 耀 男,1987年生,博士,副教授,硕士生导师,研究方向为电力设备故障诊断、新能源发电。E-mail:nihaozhaoyao@163.com
李东东 男,1976年生,博士,教授,博士生导师,研究方向为电力设备故障诊断、风力发电与电力系统稳定控制、智能用电。E-mail:powerldd@163.com(通信作者)
国家自然科学基金(51977128)、上海市自然科学基金(21ZR1425400)、电力传输与功率变换控制教育部重点实验室开放课题(2021AA01)和上海市青年科技启明星计划(21QC1400200)资助项目。
收稿日期 2021-07-12
改稿日期 2021-11-25
(编辑 赫蕾)