
图1 传统同步磁阻电机结构
Fig.1 The topology of traditional SynRM
摘要 目前,传统同步磁阻电机三层磁通屏障的转子设计性能较好、制造简易,得到行业的认可。讨论转子的不对称磁通屏障结构与磁通屏障结构变形对全面掌握同步磁阻电机的特性至关重要,因此该文研究了在不同功率等级下同步磁阻电机不对称设计规律以及基于序贯田口稳健优化方法的类凸极转子同步磁阻电机。首先对传统同步磁阻电机在一定功率等级下优化计算,得出抑制转矩脉动的不对称设计规律;然后根据开关磁阻电机凸极结构,设计类凸极转子同步磁阻电机,应用序贯田口稳健优化方法对采用分布式绕组的12槽8极电机优化得到最优功率等级,并应用至集中式绕组电机,应用磁路模型以及有限元仿真对采用不同绕组的电机作性能对比分析;最后提出一种结构更加简单、制造成本更低的同步磁阻电机。
关键词:不对称设计规律 序贯田口稳健优化方法 类凸极转子 集中式绕组
近年来,在稀土材料价格昂贵与资源短缺的情况下,相较于永磁电机,研究减少利用永磁体甚至去除永磁体的电机显得越来越重要。同步磁阻电机(Synchronous Reluctance Machine, SynRM)不应用永磁体材料,电机转矩与效率均较高,目前已在机床、轨道交通、电动汽车以及纺织设备等场合得到应用[1-4]。另外,由于其电机转子结构比较简单,所以装配维护方便[5]。因为同步磁阻电机仅采用电枢励磁,在高速运行时电机不需要弱磁,因而调速范围广。在相同功率等级下,相较于感应电机,同步磁阻电机的效率更高、转子损耗更小、转矩密度更高[6];与开关磁阻电机相比,同步磁阻电机的转矩脉动小、振动噪声小、效率也更高、鲁棒性稍差[7]。一些学者在同步磁阻电机所体现出的优势基础上,将少量的永磁体加入同步磁阻电机的定转子上,增加除磁阻转矩外的永磁转矩,虽然这样能够提高电机的转矩密度,但是加入永磁体会出现齿槽转矩、永磁体退磁、永磁材料成本高、制造难度大等问题[8-9]。
文献[10]表明,在传统同步磁阻电机转子结构设计中,三层磁通屏障结构得到广泛认可,相较于其他层数的采用分布式绕组的同步磁阻电机,转矩脉动更小。在本文中传统同步磁阻电机设计时,三层磁通屏障的转子结构被采纳。
目前,在同步磁阻电机转矩脉动抑制的研究中,根据极槽比以及绕组类型的不同,可以通过增加定子的绕组层数以减小磁动势的谐波幅值达到降低转矩脉动的目的[11]。同时,文献[12]指出,采用分布式集中绕组能够有效缩短绕组端部缠绕长度,降低电机铜耗,减小机器的体积。
在结合两电机定子与转子方面,采用同步磁阻电机的定子与开关磁阻电机的转子可以作为下一步研究的侧重点[10,13-14]。考虑加工难易程度以及驱动方式,有学者尝试将同步磁阻电机与开关磁阻电机结合仿真,文献[15]将同步磁阻电机的三相正弦电流驱动方式应用到开关磁阻电机中,利用同步磁阻电机驱动优势,有效降低了转矩脉动。
在同步磁阻电机的定子设计中,根据电机绕组结构合理优化选择定子齿冠的辅助槽数目可以有效降低电机的转矩脉动,同时平均转矩也会因为辅助槽附近局部磁路饱和而下降[16-17]。文献[18]首次提出在同步磁阻电机转子磁通屏障与定子齿部采用不对称设计的可行性,文献[19]运用不对称设计思想在凸极转子中提出电机不对称设计的一般规律,并应用于传统的同步磁阻电机中,文中的不对称设计体现在转子的相邻极之间。通过敏感度分析,同步磁阻电机的转矩脉动很大程度受到定子与转子几何结构以及电流相位的影响[20]。与此同时,在电机优化过程中,常用响应面法与田口法[21],同时,改进的田口法能够更有效快速地优化一类电机[22]。
为了降低电机的转矩脉动,本文将不对称设计应用于传统同步磁阻电机转子,得到不同功率等级电机降低转矩脉动的一般规律,并对同步磁阻电机简化,利用开关磁阻电机加工制造简单的优势,提出一种采用同步磁阻电机定子与开关磁阻电机转子相结合的类凸极转子同步磁阻电机,在凸极转子边缘加一层较薄的肋部,在文献[22]基础上采用序贯田口稳健优化方法与有限元法对电机定子与转子各参数依次优化,得到一般性的不对称规律,以得到性能更优的磁阻电机。
本文以传统同步磁阻电机作为切入点,转子与绕组分别选用三层磁通屏障与分布式绕组,选择常用的24s/4p的槽极配比,采用无取向硅钢片材料,对同步磁阻电机的转子结构进行细致的有限元仿真,对转子每个极的内部与相邻极作不对称设计,以便找到具有适用性的降低电机转矩脉动的一般性规律。
在对电机转子不对称仿真时,定子结构不变,在相同的电流密度条件下,对电机的转矩、转矩脉动、效率以及功率因数进行对比分析。传统同步磁阻电机结构如图1所示。
同步磁阻电机的输出转矩是由直交轴电感的差值所决定的,如图2所示,直轴即d轴,定义为经过硅钢片的路径,交轴即q轴,定义为经过磁通屏障的路径,交轴的导磁性弱于直轴,由导磁强度不同可知,电机的直交轴电感值不相等,在三相正弦交流电激励下同步磁阻电机利用直交轴之间的电感差值产生的磁阻转矩运行起来。
图1 传统同步磁阻电机结构
Fig.1 The topology of traditional SynRM
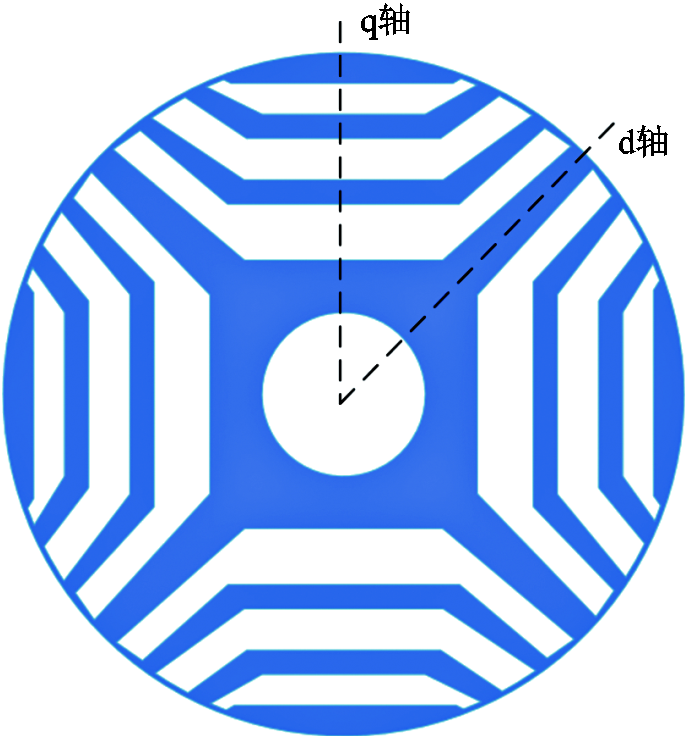
图2 电机直、交轴示意图
Fig.2 Direct axis and quadrature axis of machine
同步磁阻电机电压、电流及磁链空间矢量如图3所示。根据图3所示的电压、电流以及电机磁链的矢量位置关系可知对应电机的交直轴电感与转矩。
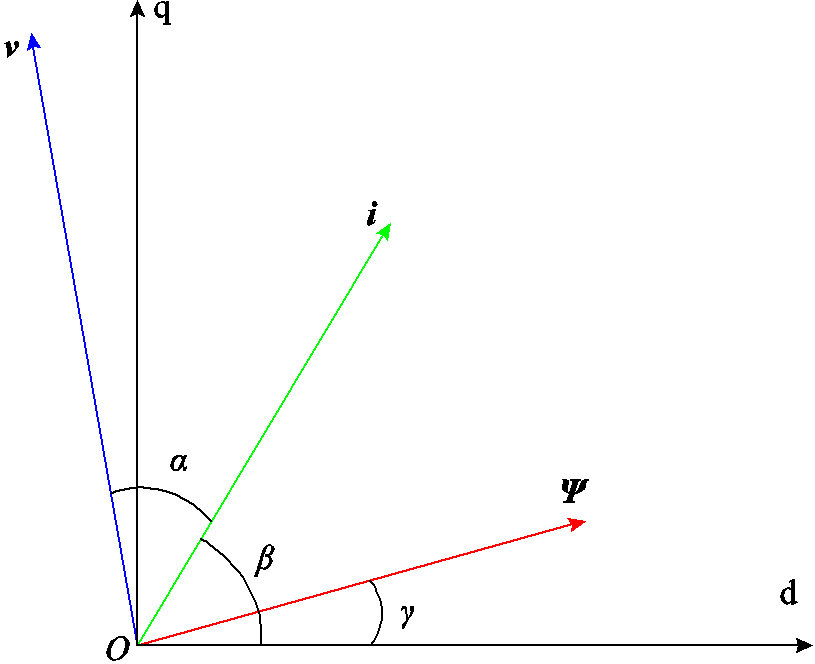
图3 同步磁阻电机电压、电流及磁链空间矢量
Fig.3 Vector diagram of voltage, current and fluxlinkage for SynRM
同步磁阻电机的平均转矩定义为
 (1)
(1)
式中,p为电机极对数;is为绕组中电流的最大值;β为绕组中电流最大值与d轴的夹角;Ld与Lq分别为d轴与q轴的电感,电感L可以表示为
 (2)
(2)
式中, 为电机磁链。根据式(2),同步磁阻电机的d轴电感定义为
为电机磁链。根据式(2),同步磁阻电机的d轴电感定义为
 (3)
(3)
式中, 为电机d轴磁链;id为绕组分解于d轴电流的最大值;γ为电机磁链与d轴的夹角。
为电机d轴磁链;id为绕组分解于d轴电流的最大值;γ为电机磁链与d轴的夹角。
同步磁阻电机的q轴电感为
 (4)
(4)
式中, 为电机q轴磁链;iq为绕组分解于q轴电流的最大值。
为电机q轴磁链;iq为绕组分解于q轴电流的最大值。
在传统同步磁阻电机的转子不对称设计中,电机定子不变,转子每个极与相邻极作不对称设计,对同一极每层磁通屏障两侧的宽度以及张角,相邻极每层磁通屏障对应位置的磁通屏障的宽度以及张角作不对称处理,图4为传统同步磁阻电机不对称转子设计示意图,所设定的不对称参数为α、α1与Δ,α为最外层磁通屏障张角的差值,当差值不为0时,电机结构不对称;α1为相邻极对应层磁通屏障张角的差值角;Δ为每层磁通屏障宽度的差值。根据电机转矩脉动最小原则,本文中同步磁阻电机每层磁通屏障两侧采用的是平行结构。

图4 传统同步磁阻电机不对称转子设计示意图
Fig.4 The design of asymmetrical rotor for traditional SynRM
由图4中所标注的1~4定义各层磁通屏障张角与宽度由小到大依次表示如下。
第一层磁通屏障张角为
 (5)
(5)
式中,Ang为图4电机1位置第一层磁通屏障的张角,Ang下角标1.00为图4第一层的1位置,1.01为图4第一层的2位置,依次类推;α为第一层磁通屏障电机1位置与2位置的差值角度;α1为第一层磁通屏障电机1位置与3位置的差值角度。
第二层磁通屏障张角为
 (6)
(6)
式中,Ang下角标2.00为图4第二层的1位置,2.01为图4第二层的2位置,依次类推;δ为电机1位置第一层与第二层磁通屏障的张角差值;β为第二层磁通屏障修正角度。
第三层磁通屏障张角为
 (7)
(7)
式中,Ang下角标3.00为图4第三层的1位置,3.01为图4第三层的2位置,依次类推;γ为第三层磁通屏障修正角度。
磁通屏障宽度见表1。
表1 磁通屏障宽度
Tab.1 Width of flux barrier

第一层w1w1-△w1w1-△ 第二层w2w2-△w2w2-△ 第三层w3w3-△w3w3-△
通过三个不对称参数,可以实现每极各层磁通屏障的张角与宽度不等,减小了电机不对称优化的时间,提高了运算效率。
本文中传统同步磁阻电机裂比s为
 (8)
(8)
式中,Rs为定子外半径;Rr为转子外半径。
为了验证传统同步磁阻电机不对称设计在不同电机功率等级下的适用性,保持电机裂比s=0.57不变,对电机的内外径同时乘以相同的倍数,并进行有限元仿真,以期找到一般性的结论性规律。
传统同步磁阻电机功率等级见表2。
表2 传统同步磁阻电机功率等级
Tab.2 Power levels of traditional SynRM

参数功率等级 12345 定子外径70.087.5105.0122.5140.0 转子外径4050607080 气隙g/mm0.5000.6250.7500.8751.000 转子内径9.50011.87514.25016.62519.000
表征传统同步磁阻电机性能的指标主要有平均输出转矩、转矩脉动、凸极率、功率因数以及效率。优化的五种功率等级传统同步磁阻电机的平均转矩与转矩脉动对比见表3,从表3中可得,在18A/mm2电流密度下,电机功率等级越大,电机平均输出转矩越大,转矩脉动也会变大;同时采用不对称设计转子时,同一功率等级电机,不对称的转子设计更有利于降低电机的转矩脉动。在电机运行中,考虑到实际运行中磁路的复杂性,采用不对称设计能够更有效地找到较优的转矩特性。
表3 传统同步磁阻电机平均转矩与转矩脉动对比
Tab.3 Comparison of optimization of average torque and torque ripple for traditional SynRM
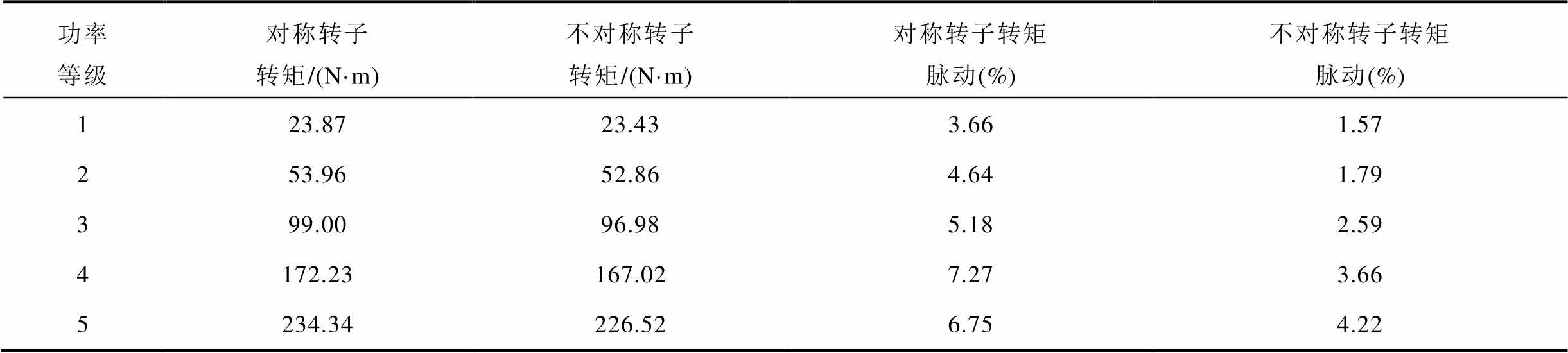
功率等级对称转子转矩/(N·m)不对称转子转矩/(N·m)对称转子转矩脉动(%)不对称转子转矩脉动(%) 123.8723.433.661.57 253.9652.864.641.79 399.0096.985.182.59 4172.23167.027.273.66 5234.34226.526.754.22
电机的功率因数越高,电机损耗越小,利用的有功功率越高。不同功率等级传统同步磁阻电机功率因数如图5所示,随着电机功率等级的增大,传统同步磁阻电机的功率因数呈下降趋势,且电机功率等级越大,功率因数降低越快。该传统同步磁阻电机在采用较小的电机功率等级时,能够更有效地发挥其性能。
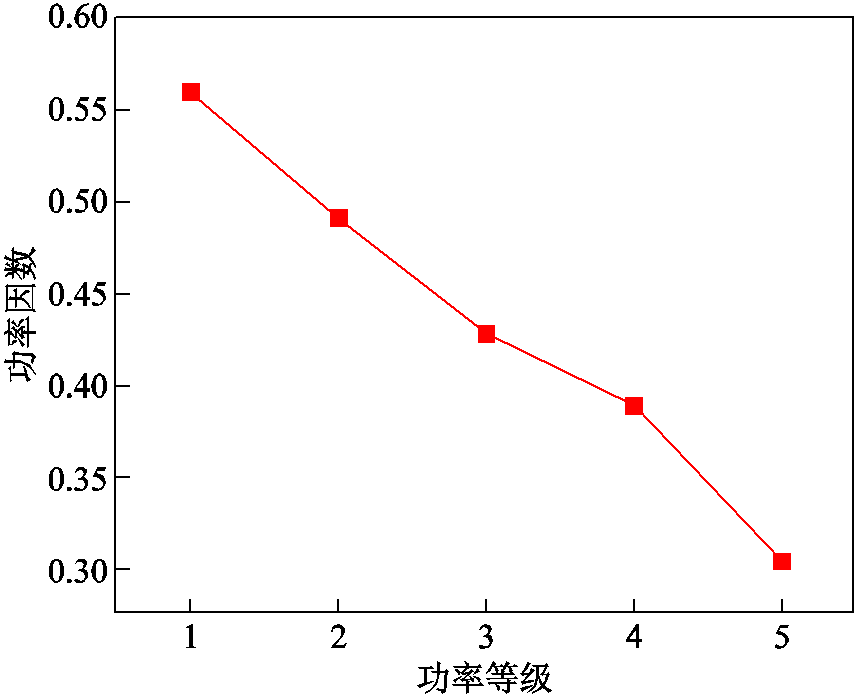
图5 不同功率等级传统同步磁阻电机功率因数
Fig.5 Power factor of traditional SynRM with different power levels
电机凸极率的大小直接影响电机的输出转矩,不同功率等级传统同步磁阻电机凸极率如图6所示,随着电机功率等级的增大,传统同步磁阻电机的凸极率呈下降趋势,且电机功率等级增大为原来的两倍,凸极率也会降低于原来的1/2。不同功率等级传统同步磁阻电机效率如图7所示,随着电机功率等级的增大,传统同步磁阻电机的效率呈先上升后下降趋势,在电机功率等级变大后,转矩增大,电机的效率也会增大。
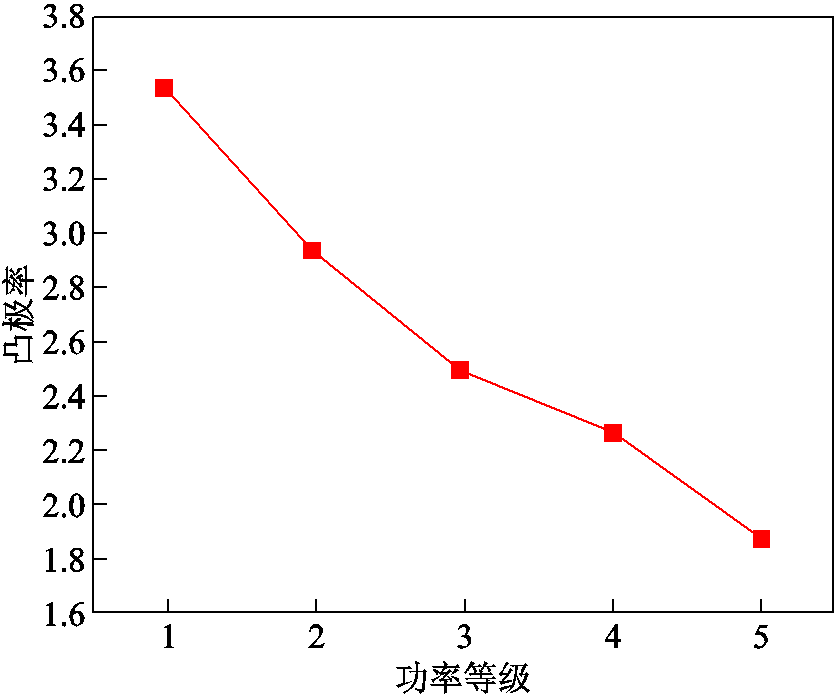
图6 不同功率等级传统同步磁阻电机凸极率
Fig.6 Salient pole rate of traditional SynRM with different power levels
对于传统同步磁阻电机的不同功率等级研究,可以得到如下结论:应当选取较小的电机功率等级,才能够体现出较好的功率因数、凸极率等电机性能。

图7 不同功率等级传统同步磁阻电机效率
Fig.7 Efficiency of traditional SynRM with different power levels
同步磁阻电机改变功率等级之后,首先在角度、宽度参数不变的情况下,记录初始转矩与转矩脉动,并根据式(9)计算出优化结果对应的客观值,以得到不对称优化之后效果更佳的传统同步磁阻电机。
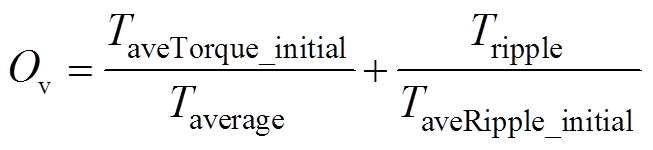 (9)
(9)
式中, 为实验的目标值,用以判断实验是否达到目标结果;
为实验的目标值,用以判断实验是否达到目标结果; 为电机优化之前的平均输出转矩;
为电机优化之前的平均输出转矩; 为电机优化之前的转矩脉动;
为电机优化之前的转矩脉动; 为实验的输出转矩结果;
为实验的输出转矩结果; 为实验的转矩脉动结果。
为实验的转矩脉动结果。
通过有限元仿真分析,得到更低的转矩脉动以及较高的平均转矩,根据电机模型结构拓扑的合理性,确定每一个磁通屏障的角度以及宽度的最优值。根据图4所示电机拓扑结构可得,磁通屏障张角不大于45°,并应用角度系数式(10)表示不对称优化结果。
 (10)
(10)
式中, 为角度系数;
为角度系数; 为i与xj与各层磁通屏障各位置的对应关系。
为i与xj与各层磁通屏障各位置的对应关系。
对应不同功率等级,传统同步磁阻电机每一层的角度系数由式(10)可得,每层的角度系数优化结果如图8~图10所示,从图中可知,在每一层磁通屏障不对称转子设计中,角度系数从图4中1~4的张角位置依次减小,且在层与层之间,由第一层,即最外层磁通屏障,向第三层逐层递减约0.2的角度系数差,换算角度为9°。具体到每一功率等级的每一位置的张角的角度系数之差约为0.01以内,不对称规律不因电机功率等级的增大而变化,对指导同步磁阻电机的设计有所启发。
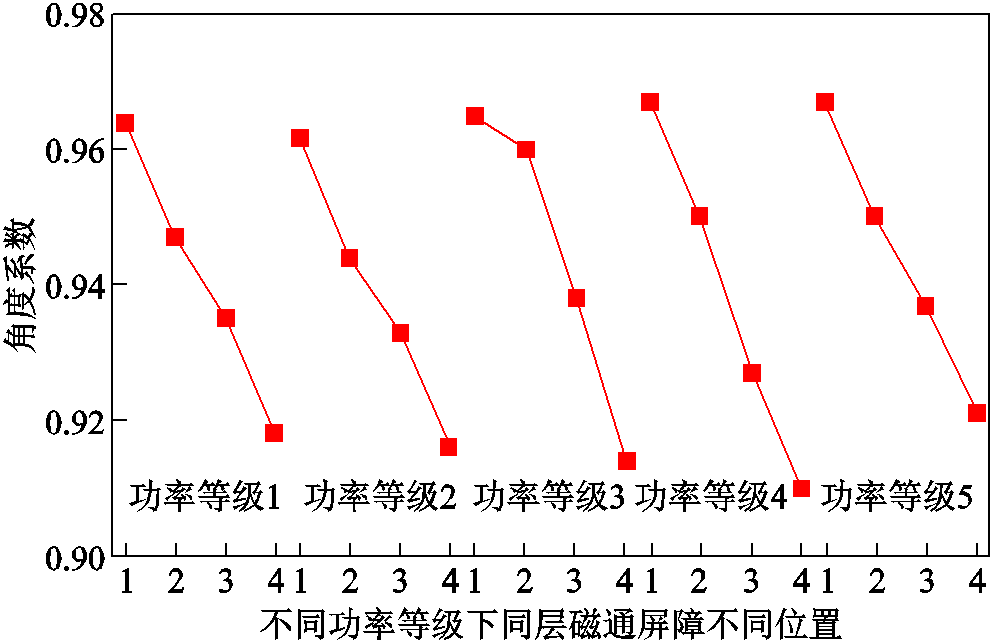
图8 不同功率等级传统同步磁阻电机第一层磁通屏障张角的不对称规律
Fig.8 Asymmetrical principle of first layer for traditional SynRM with different power levels
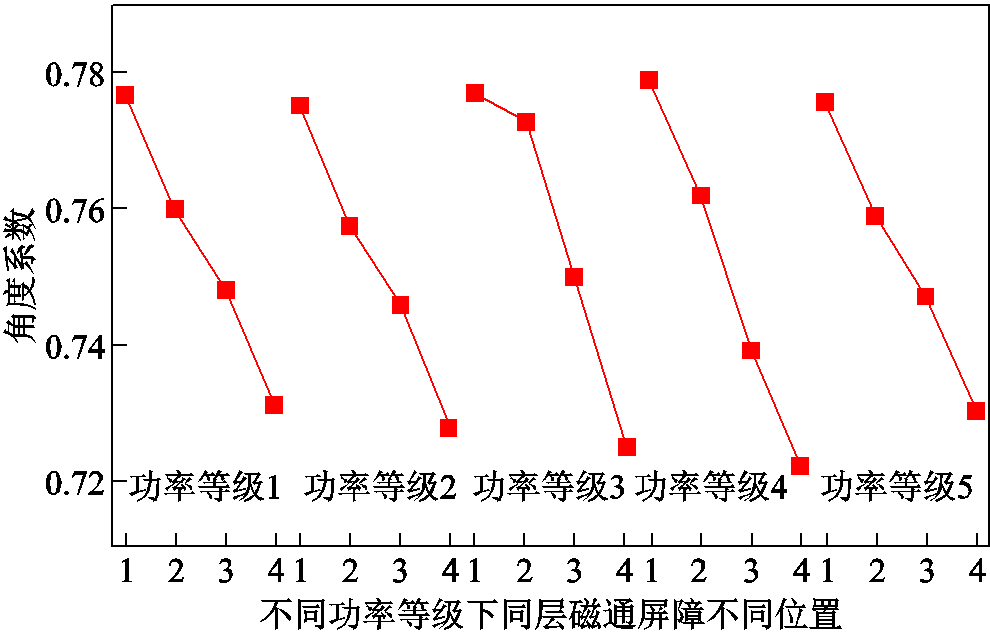
图9 不同功率等级传统同步磁阻电机第二层磁通屏障张角的不对称规律
Fig.9 Asymmetrical principle of second layer for traditional SynRM with different power levels
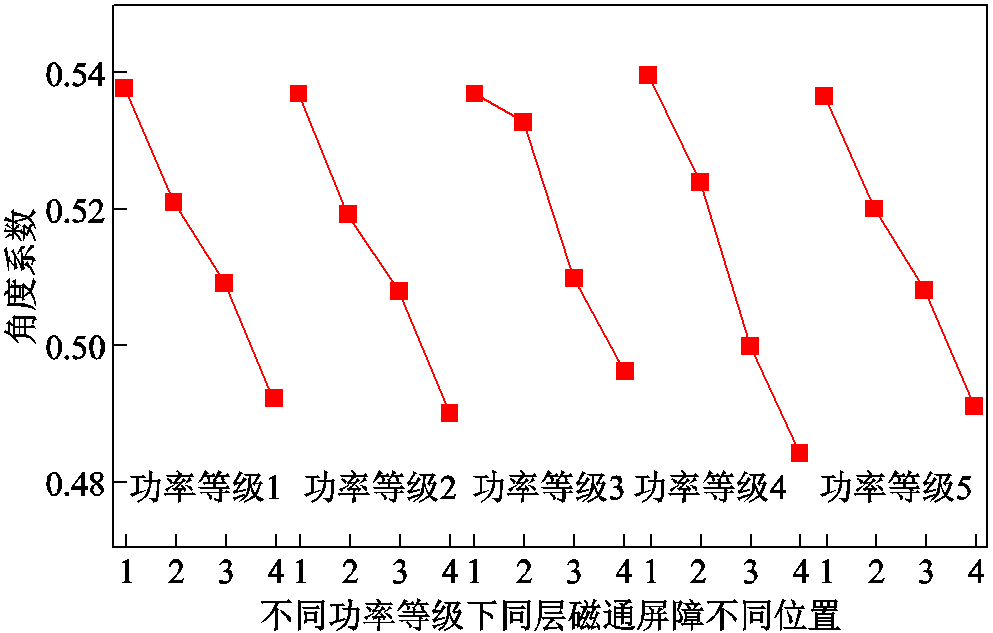
图10 不同功率等级传统同步磁阻电机第三层磁通屏障张角的不对称规律
Fig.10 Asymmetrical principle of third layer for traditional SynRM with different power levels
对应不同功率等级,传统同步磁阻电机同一极的层与层之间的宽度差值作为不对称设计的重要组成,优化结果见表4。
表4 传统同步磁阻电机宽度优化
Tab.4 Optimization of width of traditional SynRM

功率等级宽度差△/mm宽度不对称转矩脉动(%)宽度对称转矩脉动(%) 10.081.571.95 20.051.792.06 30.082.593.03 40.073.664.12 50.104.224.79
不对称宽度对转矩脉动的影响如图11所示。将已优化所得的功率等级1条件下不对称转子电机输出转矩23.43N·m确定为基准值,将对宽度差的优化数据与该基准值作比值,得到较小的输出转矩系数随时间的变化情况。由图11与表4可得,在宽度不对称时转矩脉动较小,采用不等宽的设计可以提高传统同步磁阻电机的转矩性能,但不对称设计也会带来平均转矩降低,同时结合表3分析可得,采用宽度不对称设计对于转矩脉动的影响没有角度不对称设计的影响大。

图11 不对称宽度对转矩脉动的影响
Fig.11 Influence of asymmetrical width on torque ripple
通过以上分析,传统同步磁阻电机在平均转矩、转矩脉动上有了很大进展,但是由于转子结构较为复杂,有必要找寻便于生产的同步磁阻电机。类凸极转子同步磁阻电机采用类似凸极转子结构,不同于凸极转子的是转子外侧有肋部存在,定子为传统同步磁阻电机的定子结构,利于装配,生产成本低。采用序贯田口稳健优化设计方法,对电机定子、转子进行有限元优化,同时优化设计的不同功率等级的电机转子参数方法也能够提高本文后序对电机分布式绕组设计的仿真效率,以快速得出每个电机参数的合适范围,并利于后续改变电机的绕组结构等,这样节省了仿真时间,提高工作效率。本文中列举了几种不同绕组类型类凸极转子同步磁阻电机,对电机转子作不对称设计,利用序贯田口稳健优化方法对电机作细致的仿真研究。
本文研究的类凸极转子同步磁阻电机为12s/8p槽极比,绕组分别采用分布式与集中式两大类,集中式绕组分为单层、双层与四层结构。电机模型如图12所示。图12a为采用分布式绕组类同步磁阻电机结构,图12b为采用单层集中式绕组类凸极同步磁阻电机结构,不同相之间的定子齿并未被绕组缠绕。图12c采用的是双层集中式绕组类同步磁阻电机结构,每个定子齿部均有绕组缠绕。图12d采用的是四层集中式绕组类凸极同步磁阻电机结构,每个定子齿部均有绕组缠绕。

图12 类凸极转子同步磁组电机四种结构
Fig.12 Four structures of SynRM with quasi-salient pole rotor
图12中,电机绕组的分相情况均已给出,分布式绕组跨越多个定子齿,集中式绕组跨越一个定子齿。
类凸极转子同步磁阻电机的转子不对称设计方法与传统同步磁阻电机相比,凸极的宽度通过改变磁障的宽度得以修改,每个凸极之间磁通屏障的张角不等,同时减小了层数,更利于优化分析。如图13所示为电机转子不对称设计方法,起不对称设计作用的参数均已列出,分别为磁障张角Angle1与Angle2,磁障宽度w10、w11、w20与w21,磁障长度l1、l2与l3,以及肋部宽度△1与△2。
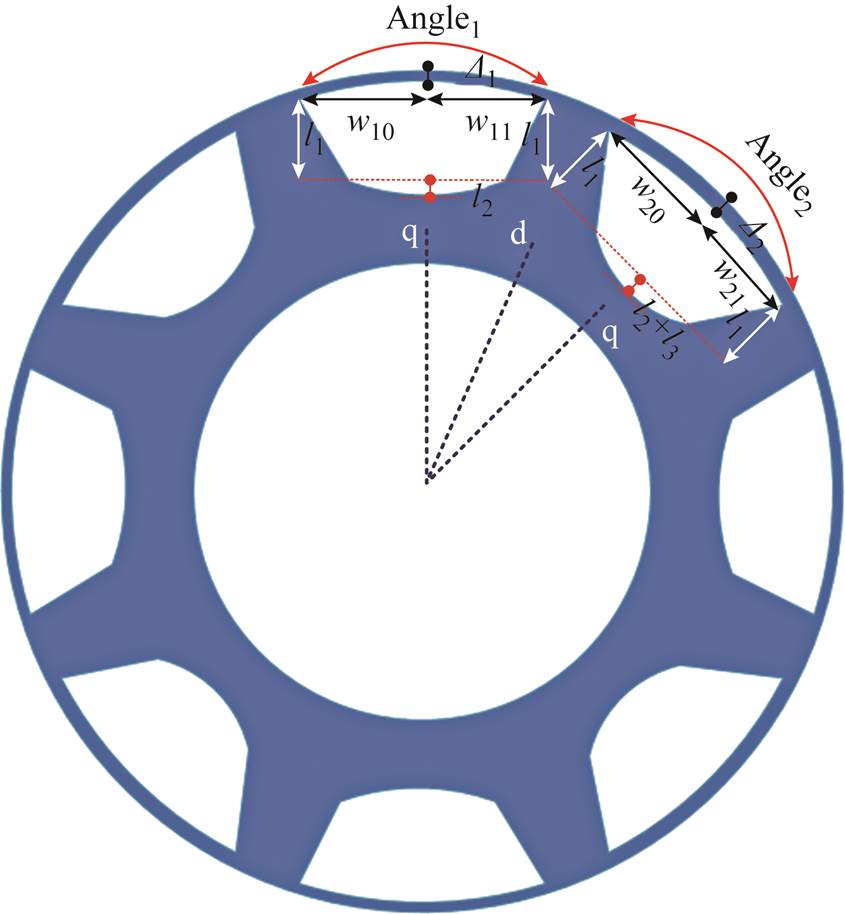
图13 类凸极转子同步磁阻电机不对称转子设计
Fig.13 The design of asymmetrical rotor for SynRM with quasi-salient pole rotor
本文提出的类凸极转子同步磁阻电机在转子中引入了不对称磁通屏障设计的做法,并在定子与转子的优化过程中采用改进的序贯田口稳健设计方法(Sequential Taguchi Robust Optimization Method, STROM)。序贯是指在抽样时,事先不规定总的抽样个数(实验次数),而是首先抽少量的样本,根据其结果,再决定继续还是终止实验。在优化定子与转子的结构参数时,首先记录优化之前的初始值,包括电机优化之前的平均输出转矩、转矩脉动以及每一参数的初始值,选取每一待优化的参数的最大值以及最小值,根据传统田口法对每一参数在确定的最值之间选3~4个水平数值。此改进的田口法在每个参数下引入两水平的参数噪声因素对参数的信噪比进行计算,根据每次实验的平均输出转矩和转矩脉动与上一次的实验结果相比较,确定实验是否继续。以上四种结构的电机均采用此优化方法,以得到优化效果良好的类凸极转子同步磁阻电机。
以采用分布式绕组的类凸极转子同步磁阻电机定子优化为例,介绍STROM方法的优化过程:
(1)根据抽样实验流程如图14所示,首先确定平均转矩与转矩脉动的初始值,初始平均转矩为9.944 6N·m,初始转矩脉动为141.28%。
(2)类凸极转子同步磁阻电机优化参数、第一次实验参数水平分别见表5、表6,选取4个参数优化电机定子,确定参数的优化范围,确定4个参数的4个优化水平。
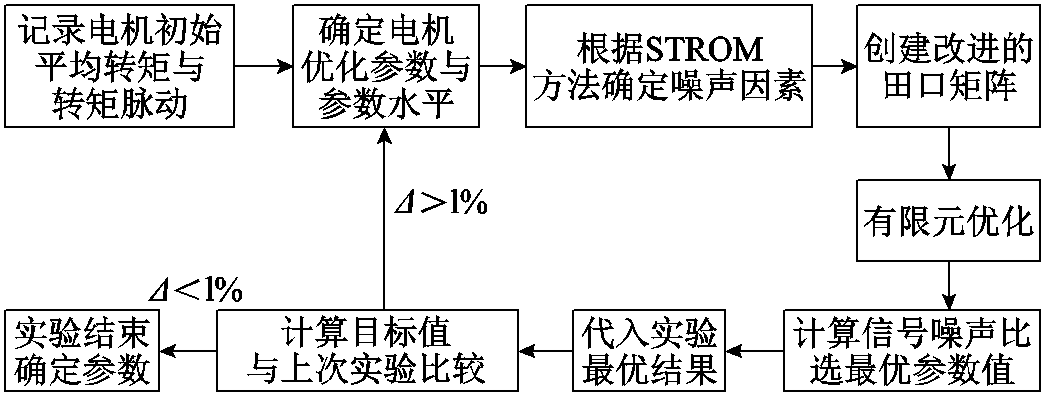
图14 序贯田口稳健优化方法流程
Fig.14 Flowchart of sequential Taguchi robust optimization method
表5 类凸极转子同步磁阻电机优化参数
Tab.5 Optimization parameters of SynRM with quasi-salient pole rotor

参数初始数据最小值最大值 A-定子内半径/mm504753 B-靴部/mm1.50.52.5 C-齿部/mm12812 D-齿宽/(°)10812
表6 第一次实验参数水平
Tab.6 Parameters levels of first experiment

参数水平 1234 A-定子内半径/mm48.5049.5050.5051.50 B-靴部/mm0.751.001.251.50 C-齿部/mm9.5010.5011.5012.50 D-齿宽/(°)9101112
(3)一个参数承受噪声干扰的能力表征参数稳定性,待优化4个参数的噪声系数见表7。
表7 噪声系数
Tab.7 Noise factor

参数水平 12 A-定子内半径/mm-0.1+0.1 B-靴部/mm-0.1+0.1 C-齿部/mm-0.1+0.1 D-齿宽/(°)-0.1+0.1
(4)建立改进的田口稳健优化方法的矩阵。
(5)对有限元计算得到的实验结果运用式(11)、式(12)分析,计算矩阵中的每一组实验的信号噪声比;根据每组实验结果运用式(13)计算每个参数对应的相应水平的信噪比,确定该次实验的最优解。
(6)将步骤(5)中确定的最优解代入有限元模型求解。
(7)根据式(11)计算电机的目标值,并与上次实验的结果比较,若目标值降低小于1%,则停止实验;否则,继续步骤(2)。
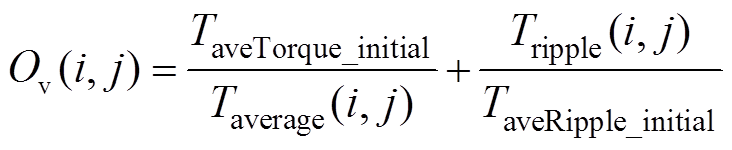 (11)
(11)
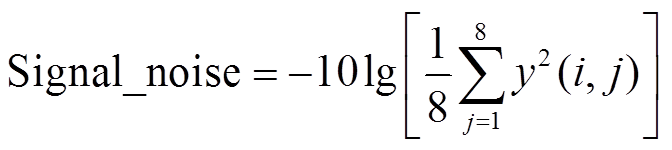 (12)
(12)
 (13)
(13)
式中, 为每次实验的目标值,用以判断实验是否达到目标结果;
为每次实验的目标值,用以判断实验是否达到目标结果; 为每次实验的输出转矩结果;
为每次实验的输出转矩结果; 为每次实验的转矩脉动结果;
为每次实验的转矩脉动结果; 为信号噪声比;
为信号噪声比; 为各水平的信噪比;
为各水平的信噪比; 为每组实验的信噪比。
为每组实验的信噪比。
在该电机的定子优化过程中,共进行了6次实验,4个定子参数对应的信噪比如图15所示,每次实验的最优参数已在点下方标出相应实验序号,起初第一次实验的信噪比均大于5,经过每次实验,目标值均有较大幅度下降,在第六次实验后,Δ<1%,结束序贯田口稳健优化方法,最后再对实验优化的结果局部优化,得到最终的结果。
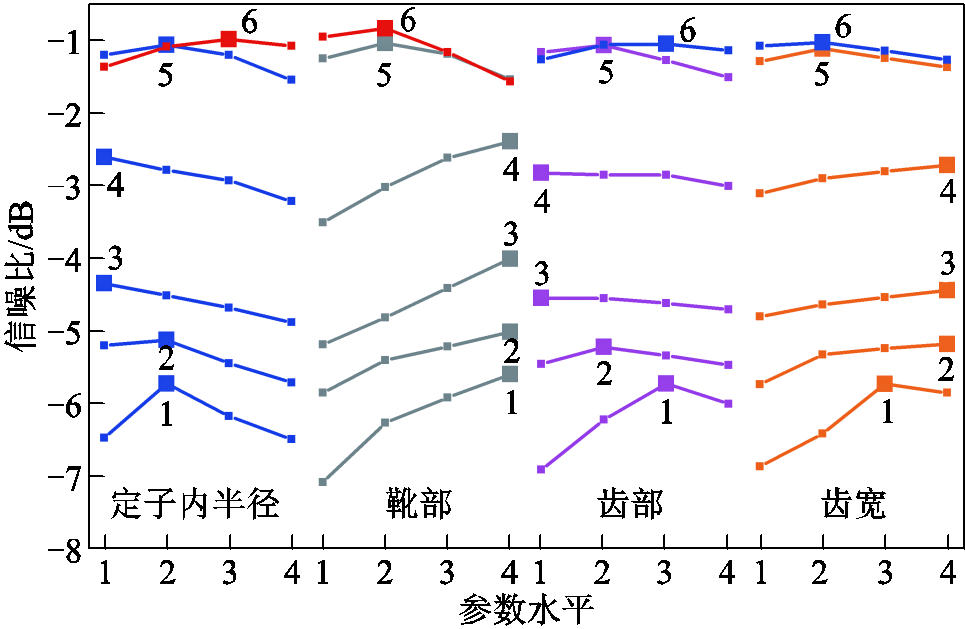
图15 信噪比
Fig.15 Signal noise ratio
根据式(11)计算每次实验的目标值如图16所示。目标值起初为2,每次实验之后的目标值与上一次实验相比均下降大于1%,在电机定子优化结束后,目标值为1.011 0,此时转矩脉动降低为6.31%,最后采用不对称设计优化转子,电机转矩脉动将更低。
类凸极转子同步磁阻电机的转子优化均采用序贯田口稳健优化方法,将采用分布式绕组优化的电机不对称转子参数优化完毕,代入集中式绕组也会显示较好的性能。
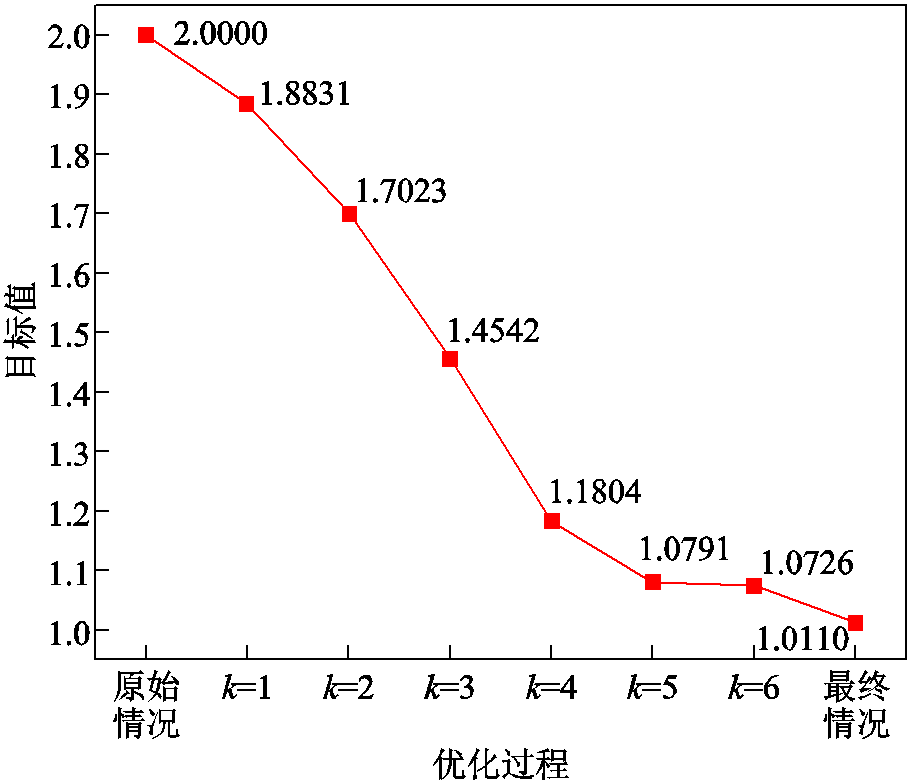
图16 目标值优化过程
Fig.16 Process of objective value optimization
研究一种电机在运行时磁力线在导磁性材料中所经过的路径十分重要。图17所示为采用分布式绕组的类凸极转子同步磁阻电机的磁力线分布,磁力线最密集的区域最高可达到2Wb/m,已知磁通路径有利于构建磁路模型。图18所示为采用分布式绕组的类凸极转子同步磁阻电机的磁路模型,磁动势Fq1~Fq4由通电绕组产生,Rs1~Rs4为定子轭部的磁阻,RL1~RL4为定子齿部的磁阻,Rg1~Rg4为磁路经过定子与转子之间的气隙的磁阻,根据图13中磁力线的实际分布,设定磁路要经过的转子肋部磁阻Rr1~Rr4与磁通屏障磁阻Rb1~Rb3,而磁路在转子侧主要经过磁路占比大的区域,设定磁阻为Rro1~Rro5,对电机磁路进行定性分析,有利于熟悉磁阻最小原理。

图17 分布式绕组类凸极转子同步磁阻电机磁力线分布
Fig.17 Flux linkage of quasi-salient pole SynRM with distributed windings

图18 分布式绕组类凸极转子同步磁阻电机磁路模型
Fig.18 Magnetic circuit of SynRM with quasi-salient pole with distributed windings
本文以一台类凸极转子同步磁阻电机为例,电机参数见表8。对于该类凸极转子结构,以上的公式推导仍然适用,且R1>R2>R3>R4>R5;同时,采用不对称设计,转子肋部的宽度相邻极之间不相等,参数w有两个值。
表8 类凸极转子同步磁阻电机参数
Tab.8 Parameters of SynRM with quasi-salient pole rotor

参数数值 定子轭外半径R1/mm70.0 定子轭内半径R2/mm59.6 定子内半径R3/mm47.4 转子外半径R4/mm46.9 转子内半径R5/mm25.0 铁心轴向长度L /mm60.0 定子齿宽α/(°)12.8 转子肋部宽度w/mm0.4, 0.6 定子槽数ns12 转子极对数p4 绕组节距(全齿绕)y13 线圈匝数N130 额定转速n1/(r/min)3 000 额定电流密度IN /(A/mm2)8
采用不对称转子设计,运用序贯田口稳健优化方法对电机的定子与转子运用有限元仿真完毕后,优化得到四种不同绕组电机的转矩以及转矩脉动。图19所示为电机的输出转矩随时间变化的曲线,从图中可以得出,采用分布式绕组以及集中式绕组双层结构的电机平均转矩较大,且采用分布式绕组的电机转矩脉动最小,可以降低为2.21%,而集中式绕组的电机转矩脉动均达到20%以上。采用分布式的绕组结构能使磁力线更多地经过铁心,减少漏磁,当采用单层的集中式绕组时,没有完全利用定子齿部的导磁能力,使得转矩脉动增大,同时,四层集中式绕组会出现磁力线过于复杂的问题,使得电机转矩与转矩脉动性能差,所以采用集中式绕组时,双层绕组是较好的选择。
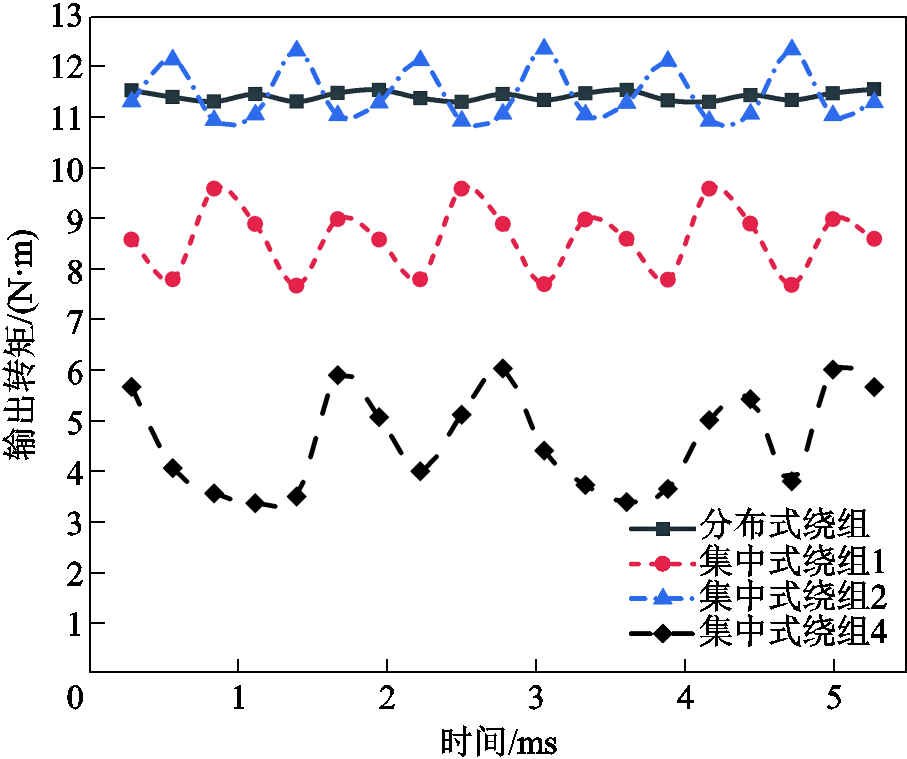
图19 类凸极转子同步磁阻电机转矩
Fig.19 Torque of SynRM with quasi-salient pole
以采用分布式与集中式双层绕组的类凸极转子同步磁阻电机为例,研究电机气隙磁通密度谐波分布以更好地解释不同绕组电机转矩脉动的差异。图20所示为分布式绕组的电机磁通密度谐波幅值,从图中可得,该电机仅含有奇次谐波,1、3、5次谐波幅值较高。图21所示为双层集中式绕组的电机磁通密度谐波幅值,从图中可得,该电机含有奇次偶次谐波,1、2、3、5次谐波幅值较高。通过图20与图21的对比分析,结合电机转矩脉动的结论,由于集中式绕组偶次谐波的存在,导致采用集中式绕组的电机转矩脉动大,不利于电机的运行。
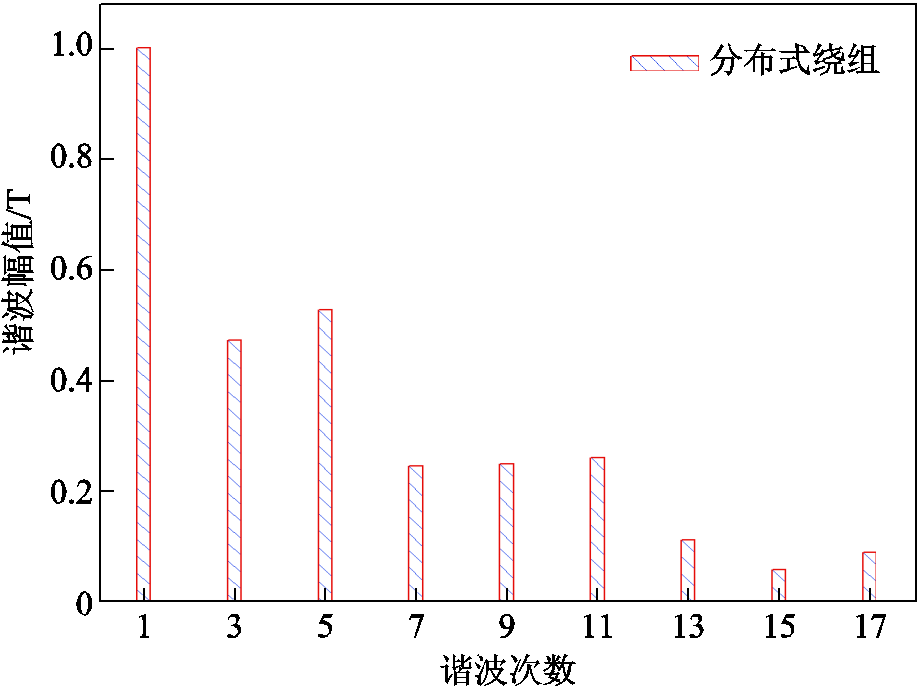
图20 分布式绕组类凸极转子同步磁阻电机磁通密度谐波分析
Fig.20 Magnetic flux density harmonic of SynRM with quasi-salient pole with distributed windings
当电机采用不同的结构绕组时,其铁心损耗是表征电机性能的关键组成成分。图22所示为四种电机的铁心损耗随时间的分布曲线。电流密度为18A/mm2时,分布式绕组的电机铁心损耗为125W,集中式绕组的电机铁心损耗均低于80W,且当采用双层与四层绕组时,电机的铁心损耗均低于单层的集中式绕组电机。
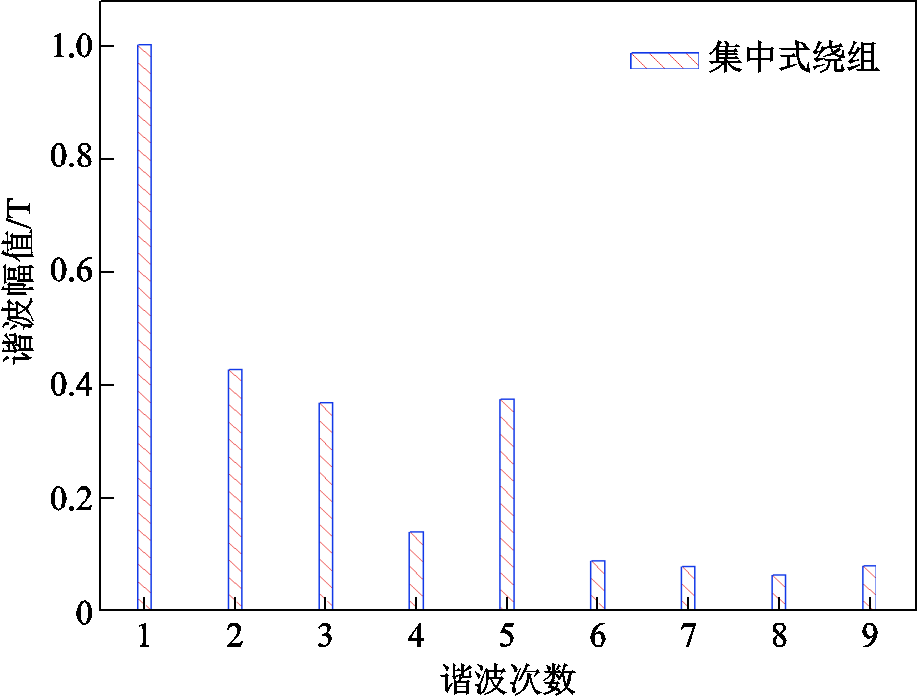
图21 集中式绕组类凸极转子同步磁阻电机磁通密度谐波分析
Fig.21 Magnetic flux density harmonic of SynRM with quasi-salient pole with concentrated windings

图22 类凸极转子同步磁阻电机铁心损耗
Fig. 22 Core loss of SynRM with quasi-salient pole
本文通过研究传统同步磁阻电机与类凸极转子同步磁阻电机两类不同转子结构的电机性能,得到更加深刻的理解。表9选择性能较好的三种电机在平均转矩、转矩脉动、铁心损耗与效率四个方面进行对比,可以得出相同电流密度与电机功率等级下,传统同步磁阻电机的转矩更大、转矩脉动最低,而类凸极转子同步磁阻电机在该类型转子结构下采用集中式绕组结构时铁心损耗较低、效率较高。在电机制作成本与装配方面,类凸极转子同步磁阻电机优势较大。
表9 不同结构同步磁阻电机对比
Tab.9 Comparison of SynRM with different structures

指标类型 传统同步磁阻电机类凸极转子同步磁阻电机类凸极转子同步磁阻电机 绕组分布式分布式双层集中式 平均转矩/(N·m)23.4311.4211.47 转矩脉动(%)1.572.2112.38 铁心损耗/W32.27125.0839.11 效率(%)84.5476.3678.14
1)传统同步磁阻电机不对称设计主要在同一极与相邻极的磁通屏障张角以及每一极的宽度方面做处理,并得出明显的不对称设计规律,采用不对称转子设计对于抑制电机转矩脉动具有良好的效果。
2)类凸极转子同步磁阻电机结构更加简单、制作成本更低。采用不同绕组结构对四种电机进行设计,对气隙磁通密度的谐波分析可知,采用分布式绕组结构更能降低电机转矩脉动,采用双层集中式绕组更能有效降低电机的铁心损耗、提高电机效率。
3)传统同步磁阻电机与类凸极转子同步磁阻电机作对比分析可得,相同电流密度与电机功率等级时,传统电机的输出转矩明显高于类凸极转子电机,通过转矩脉动分析,电机的振动噪声差异不大,采用最优的两种转子结构的电机铁心损耗差距较小,但是传统同步磁阻电机的效率要更高。
本文采用不对称转子设计与序贯田口稳健优化方法相结合的方式对传统同步磁阻电机与类凸极转子同步磁阻电机进行有限元计算,通过性能对比与制作成本分析,找到了类凸极转子同步磁阻电机在制作成本、铁心损耗等方面较传统同步磁阻电机的优势。在对输出转矩要求较低的场合,类凸极转子同步磁阻电机具有代替传统同步磁阻电机的可能性。
参考文献
[1] 杨晨, 白保东, 陈德志, 等. 可变磁通永磁辅助同步磁阻电机设计与性能分析[J]. 电工技术学报, 2019, 34(3): 489-496.
Yang Chen, Bai Baodong, Chen Dezhi, et al. Design and analysis of a variable flux permanent magnet assisted synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 489-496.
[2] 仇一鸣, 康琦, 汪镭, 等. 同步磁阻电机 dq 轴交叉耦合饱和电感模型参数寻优方法[J]. 电工技术学报, 2017, 32(4): 85-92.
Qiu Yiming, Kang Qi, Wang Lei, et al. A parameter optimization method for dq axis inductance model of synchronous reluctance motors considering cross-coupling magnetic saturation[J]. Transactions of China Electrotechnical Society, 2017, 32(4): 85-92.
[3] 董砚, 颜冬, 荆锴, 等. 磁障渐变同步磁阻电机低转矩脉动转子优化设计[J]. 电工技术学报, 2017, 32(19): 21-31.
Dong Yan, Yan Dong, Jing Kai, et al. Rotor optimal design of the gradient flux-barrier for torque ripple reduction in synchronous reluctance motor[J]. Transactions of China Electrotechnical Society, 2017, 32(19): 21-31.
[4] 杨淑英, 刘威, 李浩源, 等. 基于旋转注入的同步磁阻电机电感辨识方案[J]. 电工技术学报, 2019, 34(增刊1): 97-104.
Yang Shuying, Liu Wei, Li Haoyuan, et al. Inductance identification scheme of synchronous reluctance motor based on rotary injection[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 97-104.
[5] 徐心愿, 王云冲, 沈建新. 基于最大转矩电流比的同步磁阻电机DTC-SVM控制策略[J]. 电工技术学报, 2020, 35 (2): 246-254.
Xu Xinyuan, Wang Yunchong, Shen Jianxin. Direct torque control-space vector modulation control strategy of synchronous reluctance motor based on maximum torque per-ampere[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 246-254.
[6] Goncalves A P, Crus S M A, Ferreira F, et al. Synchronous reluctance motor drive for electric vehicles including cross-magnetic saturation[C]//VehiclePower and Propulsion Conference, Portugal, 2014: 1-6.
[7] 沈建新, 蔡顺, 袁赛赛. 同步磁阻电机分析与设计(连载之一)概述[J]. 微电机, 2016, 49(10): 72-79.
Shen Jianxin, Cai Shun, Yuan Saisai. Analysis and design of synchronous reluctance machines part I: an overview[J]. Micromotors, 2016, 49(10): 72-79.
[8] 徐媚媚, 刘国海, 陈前, 等. 永磁辅助同步磁阻电机设计及其关键技术发展综述[J]. 中国电机工程学报, 2019, 39(23): 7033-7041.
Xu Meimei, Liu Guohai, Chen Qian, et al. Design and key technology development of permanent magnet assisted synchronous reluctance motor[J]. Proceedings of the CSEE, 2019, 39(23): 7033-7041.
[9] Demidova G L, Heidari H, Andriushchenko E, et al. Comparison of synchronous reluctance machine and permanent magnet-assisted synchronous reluctance machine performance characteristics[C]//27th International Workshop on Electric Drives, Moscow, Russia, 2020: 1-6.
[10] Ma Xiyun, Li Guangjin, Zhu Ziqiang, et al. Investigation on synchronous reluctance machines with different rotor topologies and winding configurations[J]. IET Electric Power Applications, 2017, 12(1): 45-53.
[11] Alberti L, Bianchi N. Theory and design of fractional-slot multilayer windings[J]. IEEE Transactions on Industry Applications, 2013, 49(2): 841-849.
[12] El-Refaie A M. Fractional-slot concentrated-windings synchronous permanent magnet machines: opportunities and challenges[J]. IEEE Transactions on Industrial Electronics, 2010, 57(1): 107-121.
[13] 沈建新, 蔡顺, 郝鹤, 等. 同步磁阻电机分析与设计(连载之十)同步磁阻电机与开关磁阻电机定转子的组合应用[J]. 微电机, 2017, 50(2): 71-76.
Shen Jianxin, Cai Shun, Hao He, et al. Analysis and design of synchronous reluctance machines part X: combination of stators and rotors of synchronous reluctance machine and switched reluctance machine[J]. Micromotors, 2017, 50(2): 71-76.
[14] 王峰, 吴志强, 李亚杰, 等. 开关磁阻电机转子径向电磁合力的解析建模[J]. 电工技术学报, 2019, 34(5): 934-945.
Wang Feng, Wu Zhiqiang, Li Yajie, et al. Analytical modeling of rotor radial electromagnetic force in switched reluctance motor[J]. Transactions of China Electrotechnical Society, 2019, 34(5): 934-945.
[15] Liu Xu, Zhu Ziqiang. Analysis of average torque in switched reluctance motor with unipolar and bipolar excitations based on an improved fourier series model[C]// Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 2010: 1-6.
[16] 王轶楠, 唐冲, 颜钢锋. 定子齿冠开辅助凹槽抑制永磁电机齿槽转矩[J]. 微电机, 2014, 47 (10): 20-23.
Wang Yinan, Tang Chong, Yan Gangfeng. Reducing cogging torque of permanent magnet motors by notching auxiliary slot in top of stator teeth[J]. Micromotors, 2014, 47(10): 20-23.
[17] 沈建新, 蔡顺, 郝鹤, 等. 同步磁阻电机分析与设计(连载之五)定子铁心的优化设计[J]. 微电机, 2016, 49(12): 80-83.
Shen Jianxin, Cai Shun, Hao He, et al. Analysis and design of synchronous reluctance machines part V: stator core optimization[J]. Micromotors, 2016, 49(12): 80-83.
[18] Sanada M, Hiramoto K, Morimoto S, et al. Torque ripple improvement for synchronous reluctance motor using an asymmetric flux barrier arrangement[J]. IEEE Transactions on Industry Applications, 2004, 40(4): 1076-1082.
[19] Chen Qian, Yan Yujie, Xu Gaohong, et al. Principle of torque ripple reduction in synchronous reluctance motors with shifted asymmetrical poles[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(3): 2611-2622.
[20] Bianchi N, Degano M, Fornasiero E. Sensitivity analysis of torque ripple reduction of synchronous reluctance and interior PM machines[J]. IEEE Transactions on Industry Applications, 2015, 51(1): 187-195.
[21] 刘国海, 王艳阳, 陈前. 非对称V型内置式永磁同步电机的多目标优化设计[J]. 电工技术学报, 2018, 33(增刊2): 385-393.
Liu Guohai, Wang Yanyang, Chen Qian. Multi-objective optimization of an asymmetric v-shaped interior permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2018, 33(S2): 385-393.
[22] Lei Gang, Liu Chengcheng, Li Yanbin, et al. Robust design optimization of a high-temperature superconducting linear synchronous motor based on Taguchi method[J]. IEEE Transactions on Applied Superconductivity, 2019, 29(2): 1-6.
Synchronous Reluctance Machine Based on Asymmetrical Rotor Structure and Sequential Taguchi Robust Optimization Method
Abstract At present, the design for rotor of the traditional synchronous reluctance machine (SynRM) with three-layer flux barrier has better performance and convenient manufacture, which has been recognized by the industry. Discussing the asymmetric magnetic flux barrier structure and the deformation of the magnetic flux barrier structure of the rotor is very important to fully grasp the characteristics of SynRM. Therefore, the asymmetrical design principle of SynRM under different power levels and the SynRM with quasi-salient pole rotor based on sequential Taguchi robust optimization method have been proposed. First of all, the asymmetrical design principle of restraining torque ripple is obtained by optimizing the traditional SynRM according to a certain power level. Then based on the salient rotor structure of switched reluctance machine (SRM), the SynRM with quasi-salient pole rotor is designed. The sequential Taguchi robust optimization method (STROM) has been used to get the optimal size of the 12-slot/8-pole machine with the distributed winding. The performance of the machine with different windings has been compared and analyzed by using the magnetic circuit model and finite element method. Finally, a SynRM with simpler structure and lower manufacturing cost is proposed.
keywords:Asymmetrical design principle, sequential Taguchi robust optimization method, quasi-salient pole rotor, concentrated winding
DOI:10.19595/j.cnki.1000-6753.tces.L90361
中图分类号:TM352
国家自然科学基金(52007047,51877065)和河北省自然科学基金(E2019202220)资助项目。
收稿日期 2020-07-10
改稿日期 2020-10-15
刘成成 男,1988年生,讲师,硕士生导师,研究方向为电磁装置的设计、分析、控制和优化。E-mail:2016020@hebut.edu.cn
汪友华 男,1964年生,教授,博士生导师,研究方向为工程电磁场综合效应。E-mail:wangyi@hebut.edu.cn(通信作者)
(编辑 崔文静)