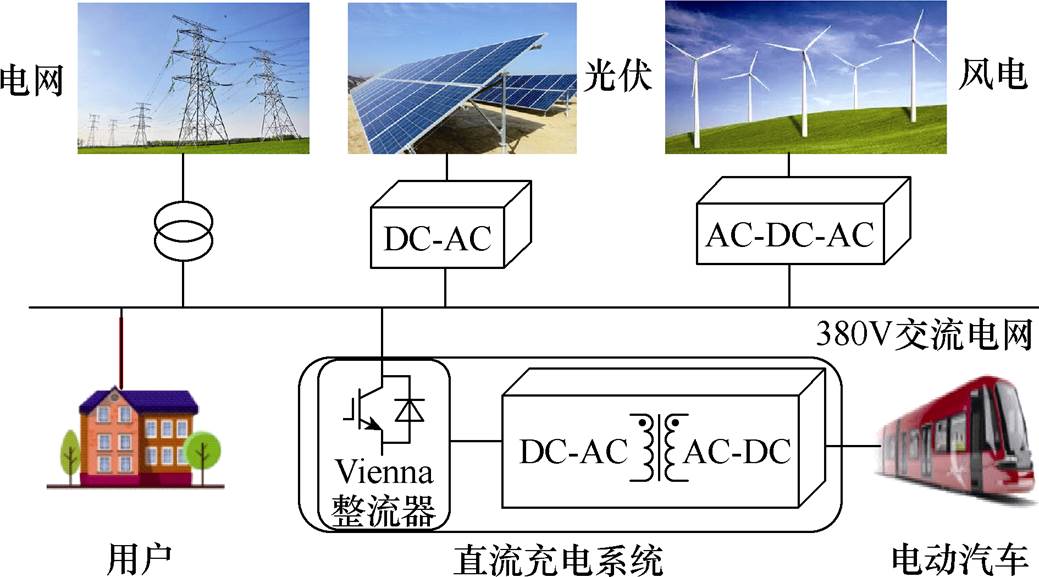
图1 直流充电系统
Fig.1 DC charging system
摘要 为了解决直流充电系统中应用于Vienna整流器的有限控制集-模型预测控制(FCS-MPC)方法占用过多计算资源、影响系统性能的问题,该文提出一种结合动态事件触发规则的模型预测控制(DET-MPC)策略。该方法实时检测系统数据并计算状态误差,只有当系统状态满足事件触发条件时,才更新系统采样数据并进行下一步的模型预测控制计算,否则将保持原有开关状态以减少计算负担;通过在事件触发条件中引入动态变量,使得系统状态发生变化时,能快速调节事件触发条件,以保证系统稳态性能。为了验证所提DET-MPC方法,进行了实验对比分析,结果表明,所提方法能在保证系统性能的前提下能有效减少计算负担,降低开关损耗,提高系统效率,并且在各系统状态变化后有较好的稳态性能。
关键词:Vienna整流器 模型预测控制 动态事件触发 直流充电系统
直流充电系统肩负着电网与电动汽车能量传输的功能,如果控制不力易引发严重的电网谐波污染、降低电能质量,进而影响充电设备正常工作[1-2]。三相Vienna变换器因具有高功率密度、低电流谐波畸变率、低功率开关管电压应力、单位功率因数运行、无死区问题和高效率等优点,可应用于电动汽车充电等场合,是一种具有广阔应用前景的三相功率因数校正器[3-6]。
随着Vienna整流器相关研究的不断深入,控制方法由常规线性控制扩展到非线性控制中[7-9]。有限控制集模型预测控制(Finite Control Set-Model Predictive Control, FCS-MPC)根据电力电子变换器系统的离散模型,考虑各种非线性约束条件,将可能输出的电压矢量作为控制集,在有限时间段内完成寻优算法,FCS-MPC流程直观、动态响应速度快,可实现非线性和约束条件下的控制,广泛应用于Vienna整流器的控制中[10-14]。在每个控制周期内都处理一次FCS-MPC的在线优化问题将占用过多的计算资源,可能使得系统处于高负荷工作状态,容易引起系统性能下降等问题,严重阻碍了FCS-MPC在电力电子变换器中的应用[15]。在整个FCS-MPC计算过程中,一些优化计算是完全没必要的。例如,在相邻控制周期内计算得到相同开关状态,一方面,开关管不进行新的动作,但却要进行一次模型预测控制计算;另一方面,为了获得较好的输入电流品质,又往往需要较高的采样及控制频率,这就更进一步加大了系统控制器的计算负担[16-18]。
文献[19]提出一种改进的模型预测算法以减少每个控制周期中电压预测的计算次数,通过判断参考电压矢量在扇区的位置再计算选择最优电压矢量,避免了多次的模型预测计算。文献[20]通过预定义的约束条件来减少可用的开关状态,进而降低计算资源消耗。文献[21]引入扩展状态观测器来估算负载电流,并通过混合PI与MPC算法,以减少计算负担。文献[22]通过在代价函数中引入中点电位信息,提前选择开关矢量减少有限控制集后再进行模型预测控制计算,以减少计算负担。
以上方法通过缩小有限控制集来降低模型预测控制计算的次数,进而达到减少计算负担的目的,但在相邻控制周期仍会产生相同的控制动作。事件触发控制是一种能有效降低冗余操作的优化策 略[23-24]。文献[25-26]提出一种将事件触发控制与模型预测控制(Static Event Triggered-Model Predictive Control, SET-MPC)相结合的控制算法,通过检测直流电压差值以判断系统是否满足事件触发条件,当系统满足触发条件时才进行模型预测计算,不然则保持上一个时刻的开关状态,有效地减少了计算负担和开关损耗。但在系统状态受到干扰或状态切换时,原有静态事件触发条件不一定适用新的系统状态,往往会影响系统性能[27-28]。
因此本文提出一种应用于Vienna整流器的动态事件触发模型预测控制(Dynamic Event Triggered- Model Predictive Control, DET-MPC)策略,在保证系统性能的前提下减少不必要的计算损耗。DET- MPC通过系统状态设计动态事件触发条件,只有满足触发条件,才进行下一步的模型预测控制,否则保持上一个时刻的开关状态以减少计算损耗。在事件触发条件中引入动态调节参数,该参数能根据系统状态实时调节事件触发阈值,使得系统面对突发扰动如负载变化、系统参数变化等能引起系统状态改变的扰动时,事件触发条件更加灵活,优化系统稳态性能,提升输入电流品质。本文给出了DET- MPC的事件触发条件设计及实现方法,通过实验对比了FCS-MPC、SET-MPC和所提DET-MPC方法的稳态特性,实验结果验证了所提方法的正确性和有效性。
采用三相Vienna整流器的直流充电系统如图1所示。通过Vienna整流器将三相交流电转换为稳定的直流电供给后方设备。
图1 直流充电系统
Fig.1 DC charging system
为了更好地说明本文所提DET-MPC方法,先简要介绍应用于Vienna整流器系统的FCS-MPC控制算法。Vienna整流器电路结构如图2所示。
有源部分由三个双向开关 组成,三个双向IGBT通过星形联结至输出电容中点M,构成三电平输出;无源部分由6个快速恢复二极管整流桥、三个滤波电抗器及两个分压电容组成。
组成,三个双向IGBT通过星形联结至输出电容中点M,构成三电平输出;无源部分由6个快速恢复二极管整流桥、三个滤波电抗器及两个分压电容组成。
 为三相交流电压源的三相电压,
为三相交流电压源的三相电压, 为Vienna整流器滤波电感,
为Vienna整流器滤波电感, 为网侧等效电阻,
为网侧等效电阻, 为网侧端电压,
为网侧端电压, 为输出中点
为输出中点 与电网中性
与电网中性 点间电压,则可得到Vienna整流器在两相旋转坐标系下的状态空间模型[7]为
点间电压,则可得到Vienna整流器在两相旋转坐标系下的状态空间模型[7]为
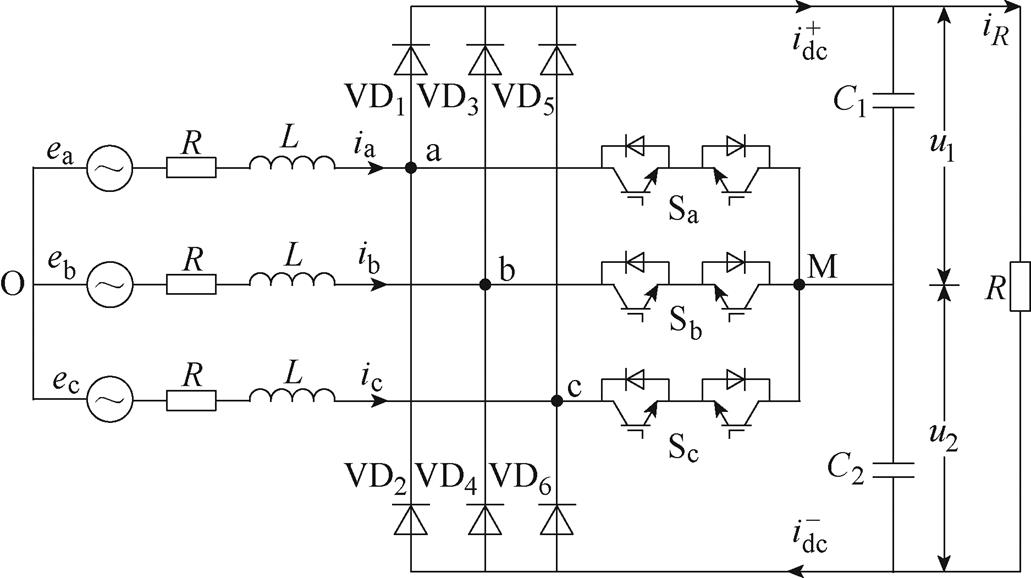
图2 Vienna整流器电路结构
Fig.2 Vienna rectifier circuit structure
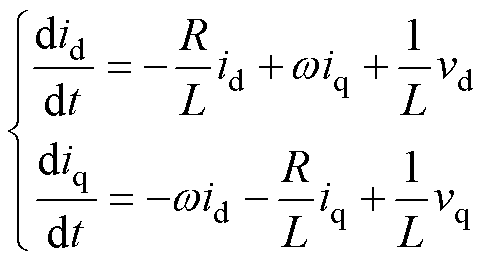 (1)
(1)
式中, 分别为三相交流电流
分别为三相交流电流 在同步旋转坐标系d、q上的分量;
在同步旋转坐标系d、q上的分量; 分别为电源电压
分别为电源电压
 在坐标系d、q上的分量;
在坐标系d、q上的分量; 分别三相网侧端电压
分别三相网侧端电压
 在坐标系d、q上的分量,而电压差
在坐标系d、q上的分量,而电压差 通过
通过 ,
, 计算得到;
计算得到; 为工频角速度。
为工频角速度。
为了预测下一个控制时刻的输入电流,通过前向欧拉法将模型离散化,可得到
 (2)
(2)
式中, 为采样周期;
为采样周期; 为第个采样周期;
为第个采样周期; 和
和 为预测的输入电流。网侧端电压
为预测的输入电流。网侧端电压
 通过电流流向、直流电压以及开关状态获得,即
通过电流流向、直流电压以及开关状态获得,即
 (3)
(3)
式中, 为系统当前时刻的开关状态;
为系统当前时刻的开关状态; 为方向判定函数,当
为方向判定函数,当 时,
时, ,当
,当 时,
时, ;
; 为直流侧电压,
为直流侧电压, 。
。
Vienna整流器模型预测控制的目标为:通过不同的开关状态组合,遍历预测电流,选择与参考电流距离最近的开关状态,使得实际电流能快速地跟踪参考电流,因此代价函数 为
为
 (4)
(4)
式中, 和
和 为由电压外环控制器得到的电流参考值,通过选择使得函数最小化的有限电压开关状态组合,达到控制Vienna整流器系统的目的。
为由电压外环控制器得到的电流参考值,通过选择使得函数最小化的有限电压开关状态组合,达到控制Vienna整流器系统的目的。
传统的FCS-MPC需要遍历所有可能的开关状态并通过模型预测算法计算得到预测电流,再经过代价函数比较后获得最优的开关状态。特别是当开关状态数量过多时,传统的FCS-MPC计算量将极大地增加系统的计算负担。因此本文提出了基于动态事件触发的模型预测控制(DET-MPC),一方面根据系统实时状态信息设置事件触发条件,只有满足条件才进行后续的模型预测控制计算,减少无效的计算负担;另一方面引入动态参数,根据系统实时状态反馈以调节事件触发条件,提高系统稳态性能。在直流充电系统中,本文所提DET-MPC控制器总体结构如图3所示。可以看到,只有满足事件触发条件,系统才进行下一步的模型预测控制计算。
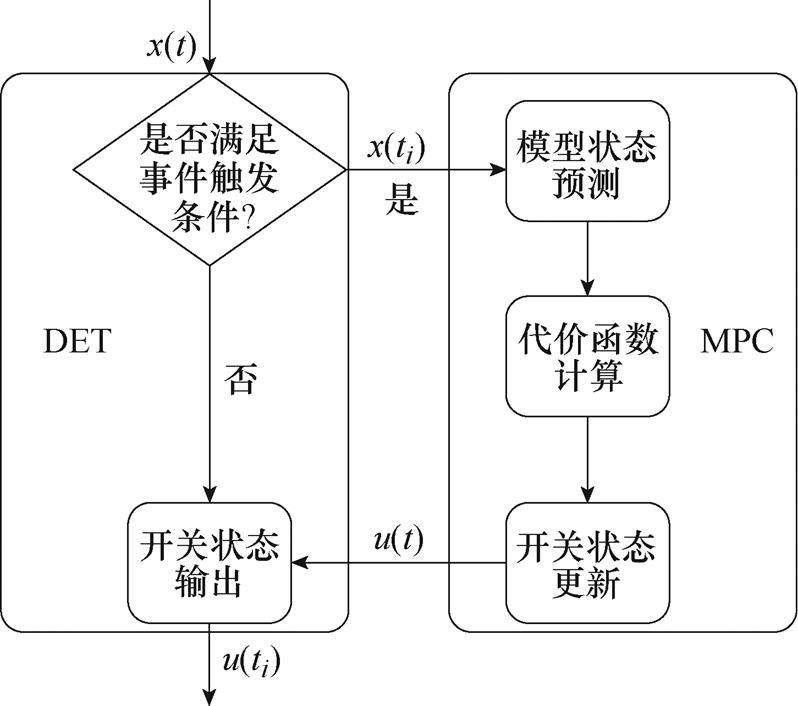
图3 DET-MPC控制器结构
Fig.3 Structure of DET-MPC
DET-MPC算法不同于传统的FCS-MPC算法,FCS-MPC在每一个控制周期都会根据每一组可能的开关状态预测电流矢量,计算代价函数,最后选择使得代价函数最小的一组开关状态。DET-MPC在触发时刻 ,将系统状态
,将系统状态 进行模型预测控制计算后,直到下一个触发时刻
进行模型预测控制计算后,直到下一个触发时刻 到来前不会进行新的模型预测控制计算,因此DET-MPC在时间
到来前不会进行新的模型预测控制计算,因此DET-MPC在时间 中会节约大量的计算资源,两个触发时刻的关系为
中会节约大量的计算资源,两个触发时刻的关系为
 (5)
(5)
式(5)表明,经过n个采样周期时间后,系统状态再次满足事件触发条件。在时刻内,系统控制量 保持不变,因此与原有FCS-MPC相比,DET-MPC能显著减少计算负担。
保持不变,因此与原有FCS-MPC相比,DET-MPC能显著减少计算负担。
为了推导触发条件,将式(2)重写为
 (6)
(6)
其中

定义状态误差为
 (7)
(7)
根据文献[29-30]得到,如果闭环系统是输入到状态稳定的,那么存在一个连续可微的函数,满足
 (8)
(8)
 (9)
(9)
式中, 为
为 函数。
函数。
那么根据文献[23]所提出的SET-MPC静态事件触发条件可以设置为
 (10)
(10)
式中, 为调节系数,用
为调节系数,用 以控制触发条件的阈值,其值越小,事件越容易触发。当系统状态不满足不等式(10)时,进行模型预测控制计算,并对系统输出开关控制信号进行更新。
以控制触发条件的阈值,其值越小,事件越容易触发。当系统状态不满足不等式(10)时,进行模型预测控制计算,并对系统输出开关控制信号进行更新。
将不等式(10)代入不等式(9),得到
 (11)
(11)
由Lyapunov稳定性可知,在该静态事件触发条件下,确保了对任意的 ,闭环系统是渐近稳定的。
,闭环系统是渐近稳定的。
从不等式(11)中可以看出,静态事件触发策略仅受当前状态值的影响,但当系统状态发生变化时,无法灵活调整原有事件触发策略,往往使得其触发阈值偏大或偏小,触发效率下降,降低系统稳态性能。因此本文提出一种引入内部变量 的动态事件触发模型预测控制(DET-MPC),能根据系统状态实时调节事件触发阈值,满足微分方程
的动态事件触发模型预测控制(DET-MPC),能根据系统状态实时调节事件触发阈值,满足微分方程
 (12)
(12)
式中, ;
; 为局部Lipschitz连续的类函数,本文选择
为局部Lipschitz连续的类函数,本文选择 ,
, 。因此本文提出的DET-MPC的动态事件触发条件设置为
。因此本文提出的DET-MPC的动态事件触发条件设置为
 (13)
(13)
式中, ,当系统状态不满足式(13)时,进行模型预测控制计算,并对系统输出开关控制信号进行更新,否则系统输出保持原开关状态。
,当系统状态不满足式(13)时,进行模型预测控制计算,并对系统输出开关控制信号进行更新,否则系统输出保持原开关状态。 、
、 、如式(6)、式(7)、式(13)所示,那么有不等式成立
、如式(6)、式(7)、式(13)所示,那么有不等式成立
 (14)
(14)
动态触发条件式(13)保证了对任意的都满足。
如果 ,那么式(14)则是不等式(13)的一个特例,因此有。若
,那么式(14)则是不等式(13)的一个特例,因此有。若 ,则通过式(13)可以得到
,则通过式(13)可以得到
 (15)
(15)
将式(12)代入得到
 (16)
(16)
通过分析和比较可知,对任意的,都有成立,因此在任意的时刻都保证h 是非负的。
为了证明系统的渐近稳定性,考虑以下的Lyapunov函数
 (17)
(17)
又因为,可知 ,对于有
,对于有
 (18)
(18)
代入式(9)、式(12)后得到
 (19)
(19)
 (20)
(20)
因此 是衰减的,式(20)表明
是衰减的,式(20)表明 时,x(t)和h(t)是渐近稳定的。
时,x(t)和h(t)是渐近稳定的。
基于动态事件触发的Vienna变换器模型预测控制策略的完整控制系统流程如图4所示。

图4 基于DET-MPC的Vienna控制系统结构
Fig.4 Structure diagram of Vienna system adopt DET-MPC
为了验证所提DET-MPC算法的正确性,搭建了三相三电平Vienna整流器实验平台,如图5所示。控制程序由HIL typhoon系统实现,该系统控制器计算频率设置为20kHz,三相公共电源由变压器接入实验电路。示波器1号为Tek-DPO2024,示波器2号为Agilent-MSO7052A。三相Vienna整流器主电路参数见表1。
本文所提出的动态事件触发控制策略式(13)、式(14)中需要设计的控制参数有 ,这些参数主要影响触发条件和系统状态的收敛速度,其中,关键参数为和
,这些参数主要影响触发条件和系统状态的收敛速度,其中,关键参数为和 ,影响着动态事件触发的频率,而影响动态参数h 的收敛速度。而为了探究和对系统性能的具体影响,本节将通过不同的控制参数值以比较Vienna整流器系统的具体性能。
,影响着动态事件触发的频率,而影响动态参数h 的收敛速度。而为了探究和对系统性能的具体影响,本节将通过不同的控制参数值以比较Vienna整流器系统的具体性能。
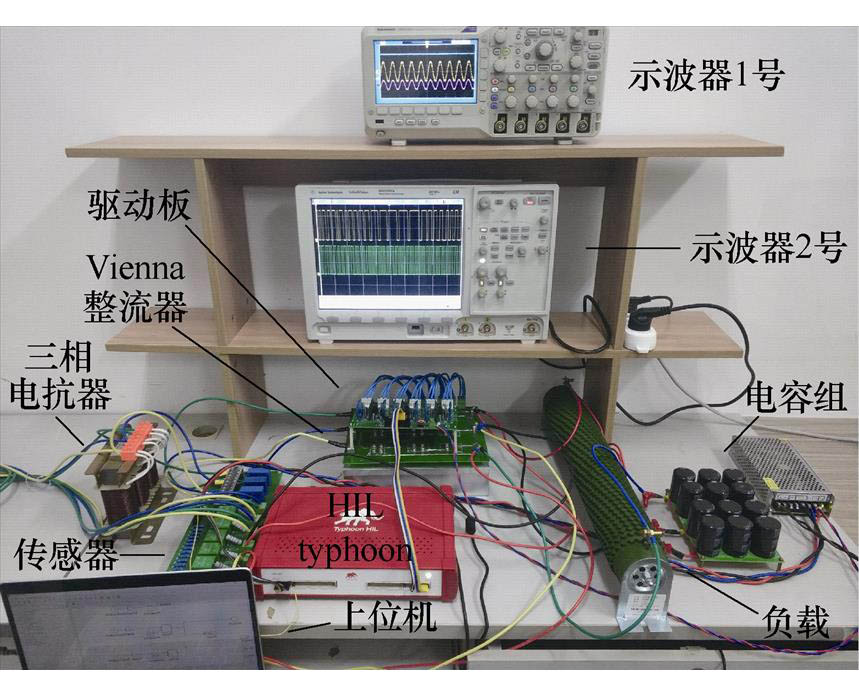
图5 三相Vienna整流器实验平台
Fig.5 Three-phase Vienna rectifier experiment platform
表1 实验参数
Tab.1 Experimental parameters
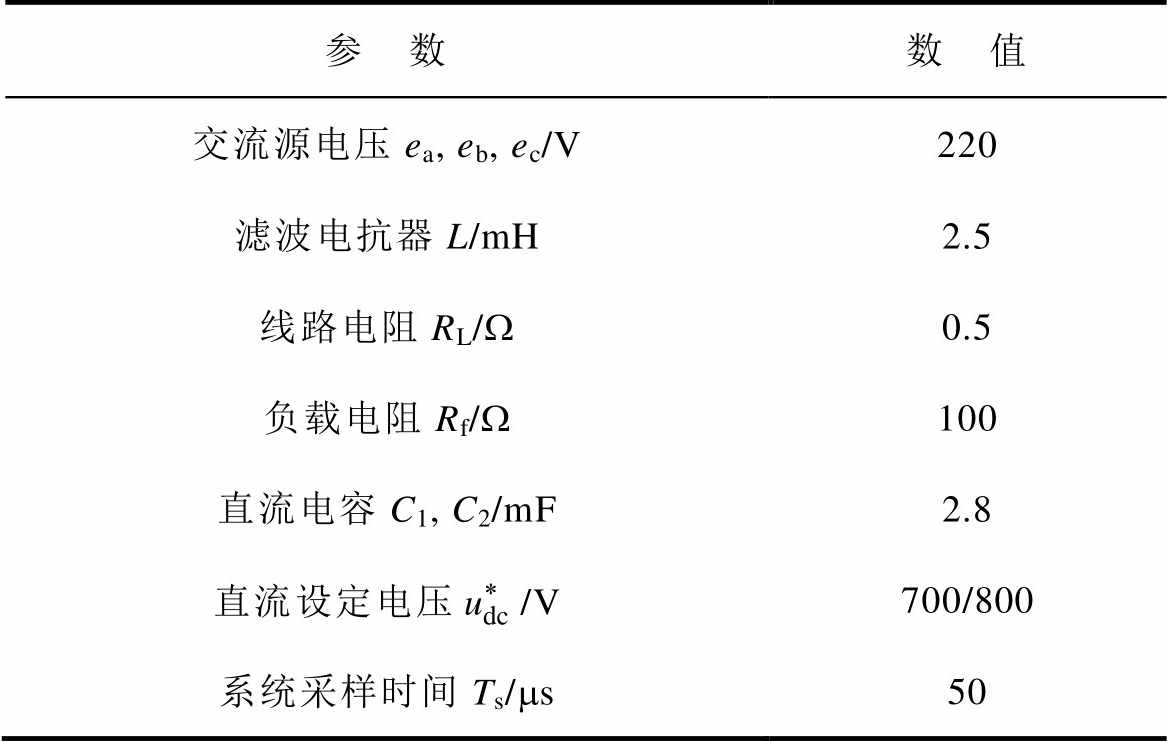
参 数数 值 交流源电压ea, eb, ec/V220 滤波电抗器L/mH2.5 线路电阻RL/W0.5 负载电阻Rf/W100 直流电容C1, C2/mF2.8 直流设定电压/V700/800 系统采样时间Ts/ms50
对于本文提出的DET-MPC算法,在直流设定电压为70V时,事件触发次数 、开关次数
、开关次数 、直流电压波动
、直流电压波动 、电流谐波含量总谐波畸变率(Total Harmonic Distortion, THD)关于控制参数和变化的实验结果如图6所示。
、电流谐波含量总谐波畸变率(Total Harmonic Distortion, THD)关于控制参数和变化的实验结果如图6所示。
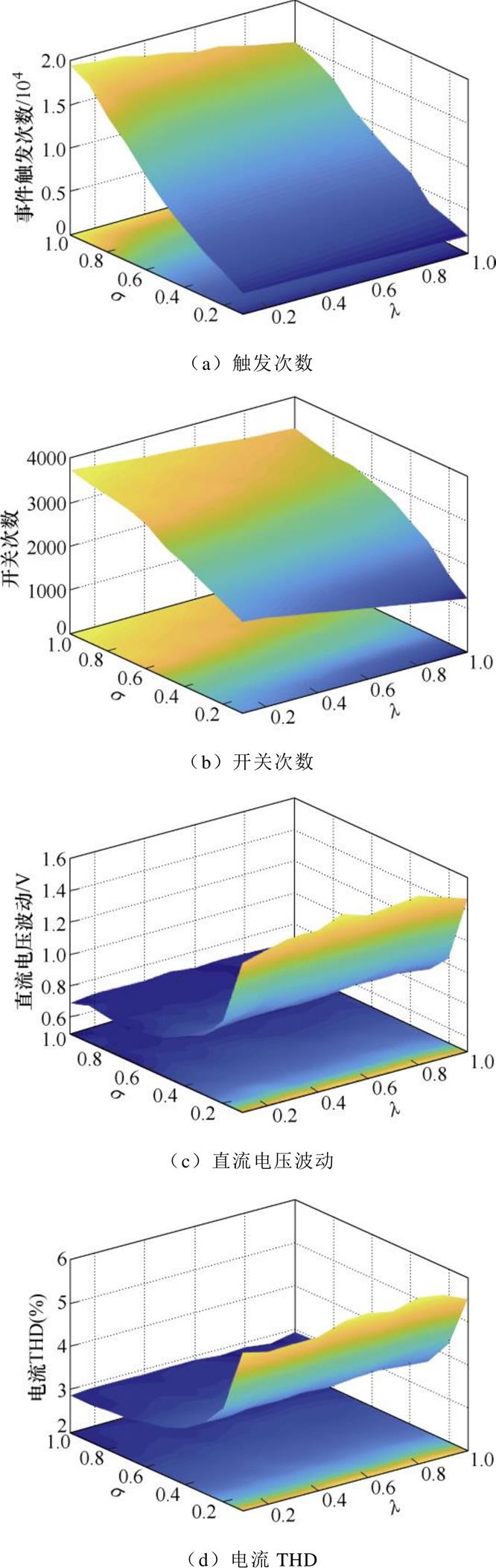
图6 l 与s 对Vienna整流器系统性能的影响结果
Fig.6 Effect results of s and l on the performance of the Vienna rectifier system
(1)事件触发次数。图6a中,DET-MPC算法在1s的运行时间内,事件触发次数从4 018变化到19 000,而传统MPC需要计算20 000次,该结果表明,DET-MPC相比于传统FCS-MPC能显著减少计算负担。并且可以看出,事件触发次数正比于而反比于,且的影响更明显。这表明,更大的和更小的构成了一个更容易满足的触发条件,导致单位时间内模型预测算法多次触发。
(2)平均开关次数。图6b中,DET-MPC算法在1s的运行时间内,三相开关管的平均开关次数从1 372变换到3 735,而传统FCS-MPC开关次数为3 542次。当选择合理的参数时,DET-MPC能显著降低开关次数。从开关次数变化趋势中可以看出,当越大而越小时,开关次数越大。该趋势和事件触发次数相一致,表明了更多的事件触发次数导致开关次数的增多。
(3)直流电压波动。图6c中,DET-MPC算法运行过程中,直流电压波动Vri在[0.692, 1.584]V范围内波动,参数的变化能显著地影响直流电压波动值,而电压波动对参数变化的影响不敏感,说明在系统稳态运行时,动态参数对系统性能影响较小。
(4)电流谐波含量。图6d中,DET-MPC算法运行过程中,三相电流THD保持在[2.82, 5.86]%范围内,THD随的增大而显著减小,但参数变化对电流THD的影响不明显,说明在系统稳态运行时,事件触发条件中的动态参数对系统性能影响较小。
图6表明,在DET-MPC算法运行中,参数影响着系统的触发频率,其值在[0, 1]范围内越小,事件触发次数以及开关次数越少,但却会使得直流电压波动和电流THD变大,严重降低系统性能,因此控制参数值的选择应考虑在保证系统电流谐波含量和电压波动在可接受范围的前提下,尽可能地减少触发次数及开关损耗;而参数影响动态参量η的收敛速度,对系统稳态性能影响较小,值在[0, 1]范围内越大,表明其收敛速度越快,事件触发次数及开关次数越少。值的选择主要考虑减少事件触发次数与开关次数。
图7为DET-MPC启动时的直流输出电压、输入电压 、输入电流
、输入电流 的波形。从图7可以看出,DET-MPC能保证系统稳定运行,直流电压波动=1.38V与电流
的波形。从图7可以看出,DET-MPC能保证系统稳定运行,直流电压波动=1.38V与电流 =4.69%也在允许范围内。
=4.69%也在允许范围内。
为了更好地对比DET-MPC的性能,实验结果除了对比传统的FCS-MPC,还与文献[27]中的静态事件触发模型预测控制策略SET-MPC进行了对比。
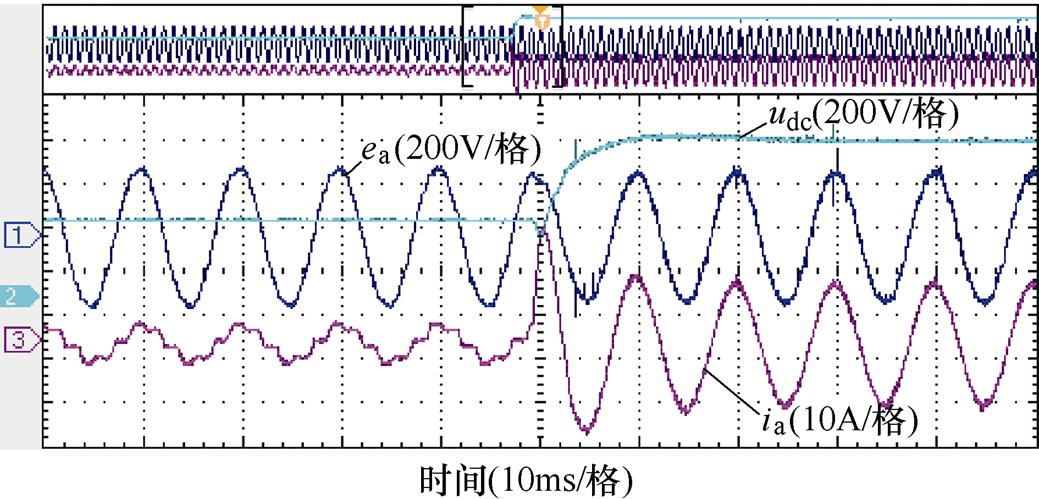
图7 DET-MPC的启动过程
Fig.7 Startup process of DET-MPC
图8~图16为传统FCS-MPC、SET-MPC和DET-MPC在稳态时电压设定值由700V突变到800V时直流电压 、输入电压
、输入电压 、输入电流
、输入电流 的波形变化情况。
的波形变化情况。
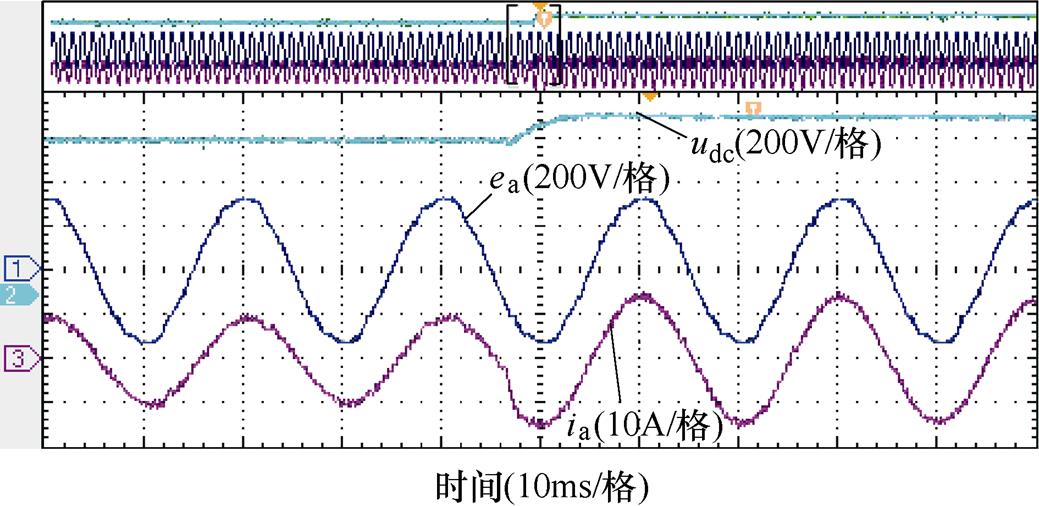
图8 FCS-MPC目标改变的实验结果
Fig.8 Experimental results of FCS-MPC while target changed
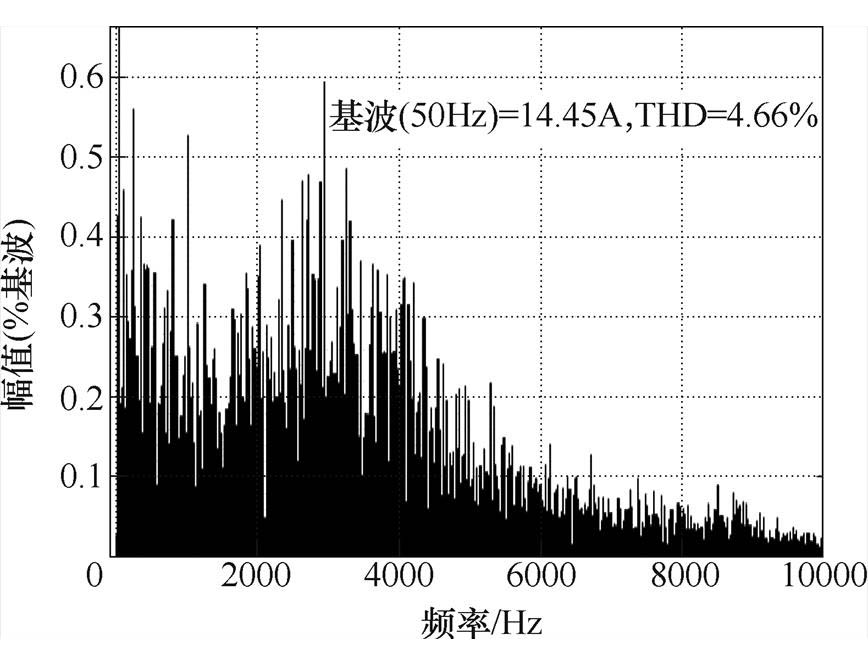
图9 FCS-MPC目标改变前的电流谐波含量
Fig.9 Current THD of FCS-MPC before target changed
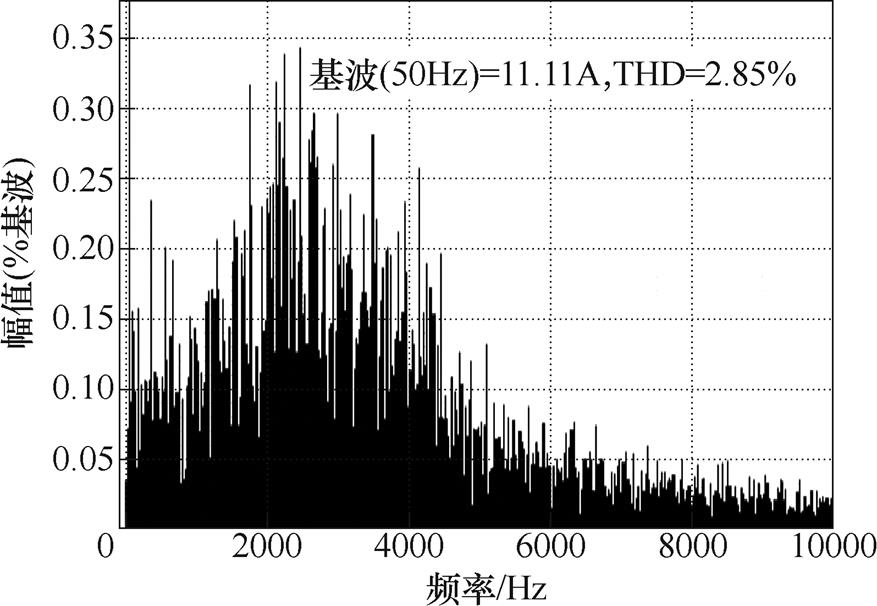
图10 FCS-MPC目标改变后的电流谐波含量
Fig.10 Current THD of FCS-MPC after target changed
从图8可以看出,传统FCS-MPC在电压设定值从700V变化到800V后,直流电压和交流电流经过半个工频周期的调整后迅速进入稳态,电压波动 由原有的1.37V变为1.55V。图9、图10为控制目标改变前后电流谐波含量的变化情况,可以看到系统输入电流
由原有的1.37V变为1.55V。图9、图10为控制目标改变前后电流谐波含量的变化情况,可以看到系统输入电流 由4.66%下降为2.85%。
由4.66%下降为2.85%。
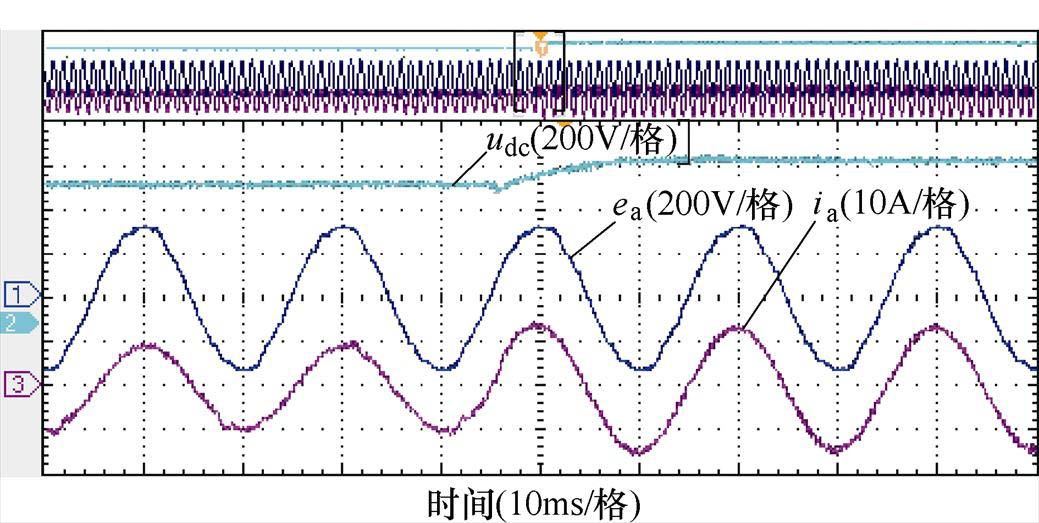
图11 SET-MPC目标改变的实验结果
Fig.11 Experimental results of SET-MPC while target changed
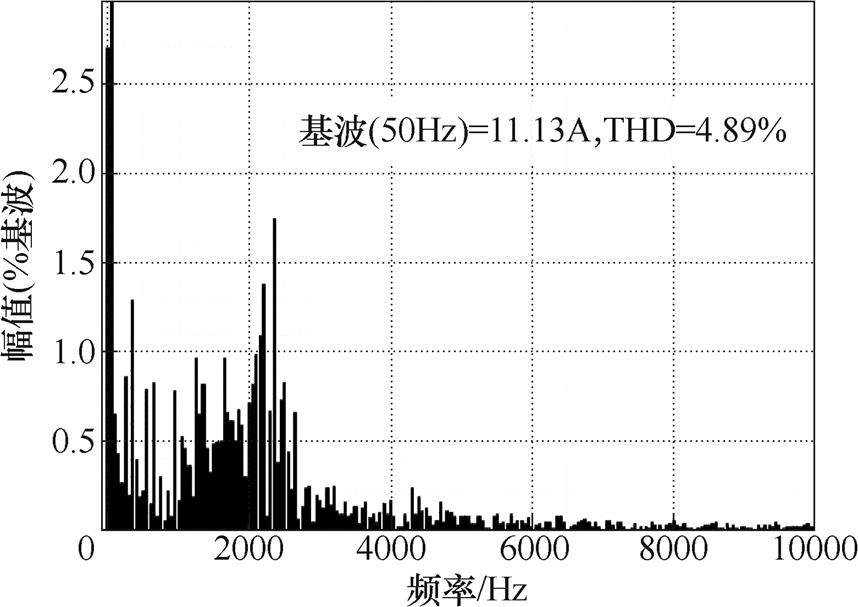
图12 SET-MPC目标改变前的电流谐波含量
Fig.12 Current THD of SET-MPC before target changed
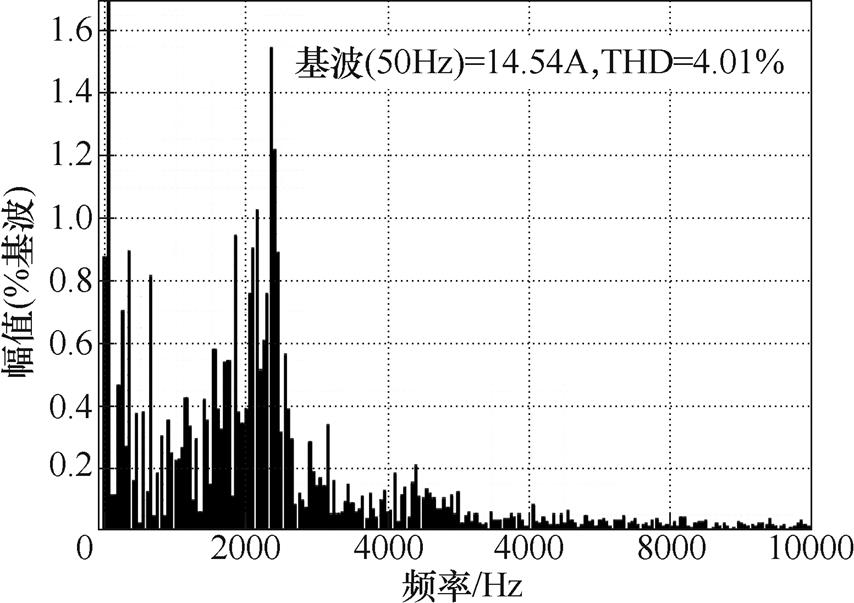
图13 SET-MPC目标改变后的电流谐波含量
Fig.13 Current THD of SET-MPC after target changed
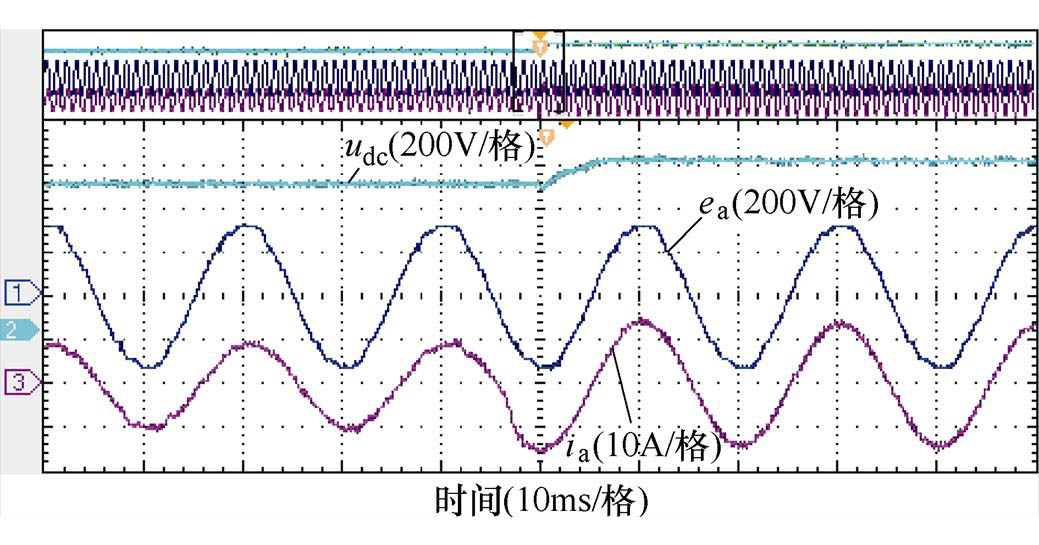
图14 DET-MPC目标改变的实验结果
Fig.14 Experimental results of DET-MPC while target changed
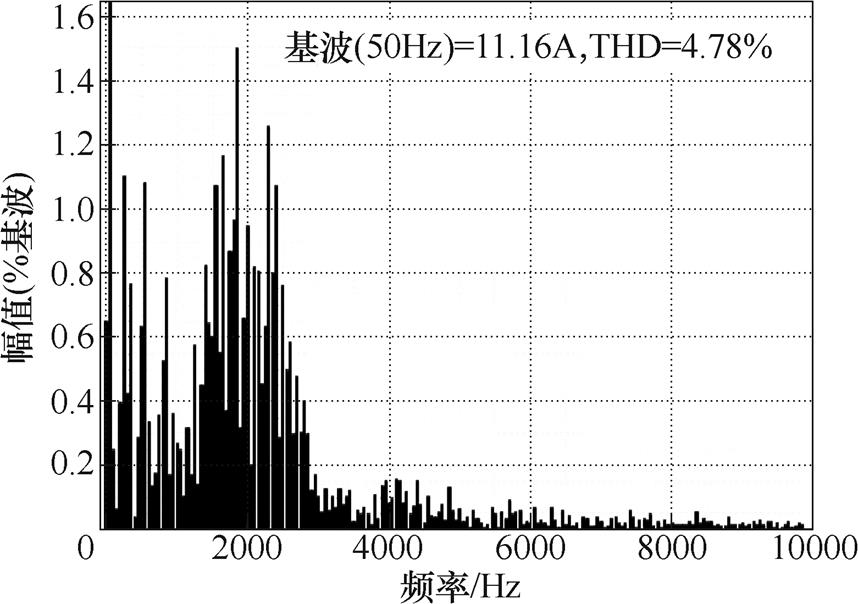
图15 DET-MPC目标改变前的电流谐波含量
Fig.15 Current THD of DET-MPC before target changed
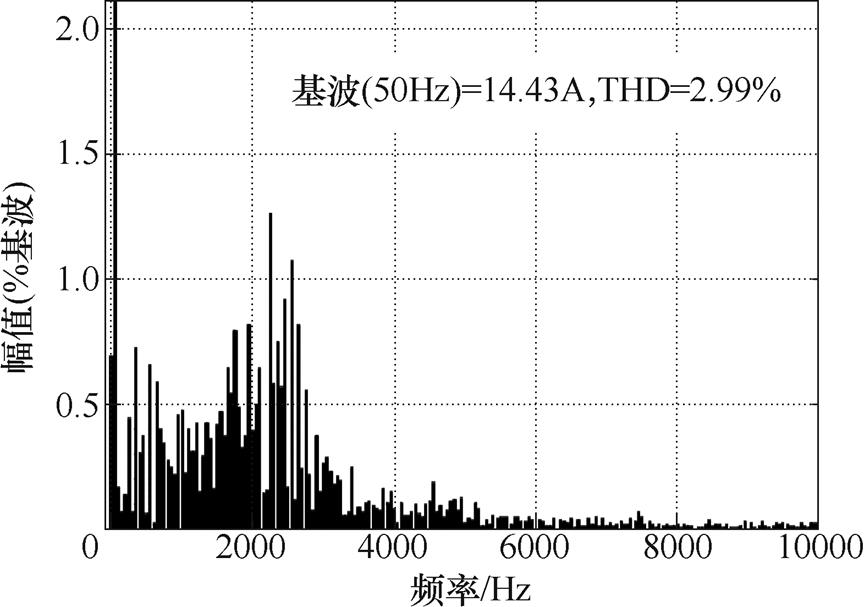
图16 DET-MPC目标改变后的电流谐波含量
Fig.16 Current THD of DET-MPC after target changed
从图11可以看出,SET-MPC在电压设定值变化后,直流电压和交流电流在经过短暂的调整后迅速进入稳态,电压波动由原有的1.40V变为1.70V。图12、图13为控制目标改变前后电流谐波含量的变化情况,系统输入电流由4.89%降为4.01%。
从图14可以看出,在电压设定值变换后,直流电压和交流电流经过快速调整后稳定,电压纹波从1.39V到1.58V。图15、图16为控制目标改变前后电流谐波含量的变化情况,交流电流THD由4.78%下降为2.99%。可以看到,系统稳态性能在控制目标切换后变化不大,动态事件触发能及时调节触发阈值保证系统稳态性能。
为了对比各控制策略在减少计算负担的性能效果,引入 表示模型预测算法触发与否,当MPC算法被触发时,将翻转。而
表示模型预测算法触发与否,当MPC算法被触发时,将翻转。而 表示A相的开关信号,当为高电平时,表示开关导通,电流可以通过;当为低电平时,表示开关闭合,电流无法通过。系统在一个工频周期(20ms)内和的波形如图17~图19所示。
表示A相的开关信号,当为高电平时,表示开关导通,电流可以通过;当为低电平时,表示开关闭合,电流无法通过。系统在一个工频周期(20ms)内和的波形如图17~图19所示。
在图17中,可以看出FCS-MPC在每个控制周期都进行模型预测计算,在一个工频周期中,模型预测控制计算400次,表明FCS-MPC触发次数 = 400,但其开关次数
= 400,但其开关次数 只有48,开关次数远小于模型预测的次数。
只有48,开关次数远小于模型预测的次数。
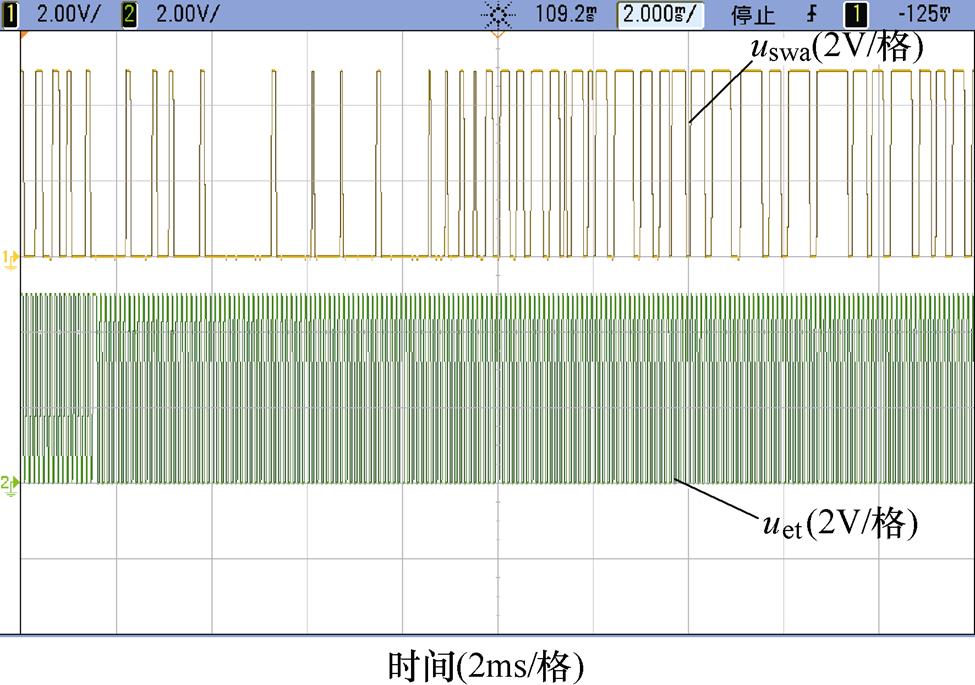
图17 FCS-MPC事件触发结果
Fig.17 Results of events triggered of FCS-MPC
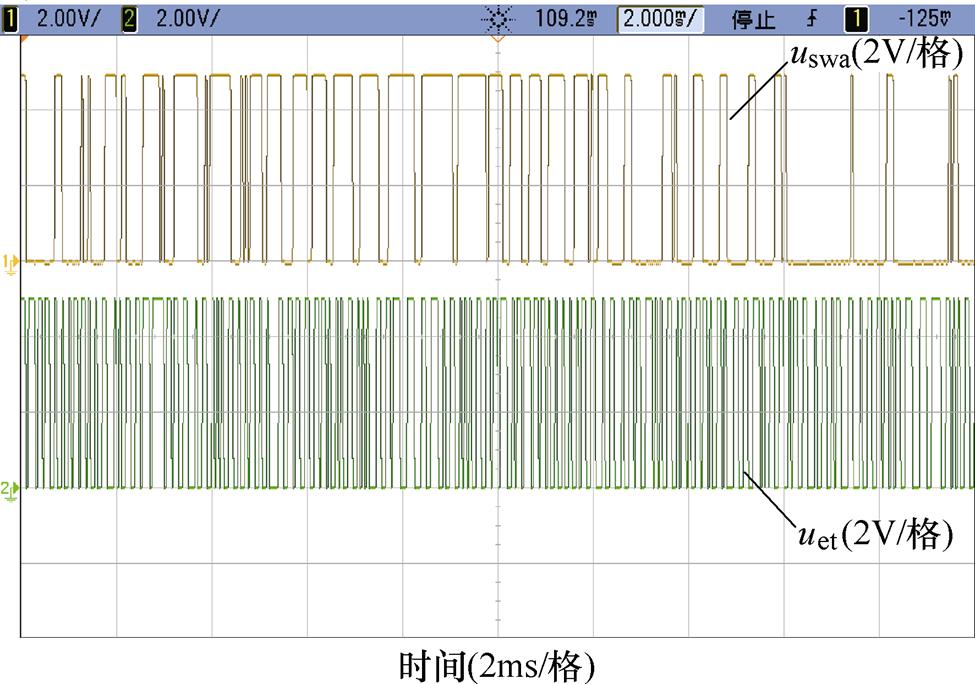
图18 SET-MPC事件触发结果
Fig.18 Result of events triggered of SET-MPC
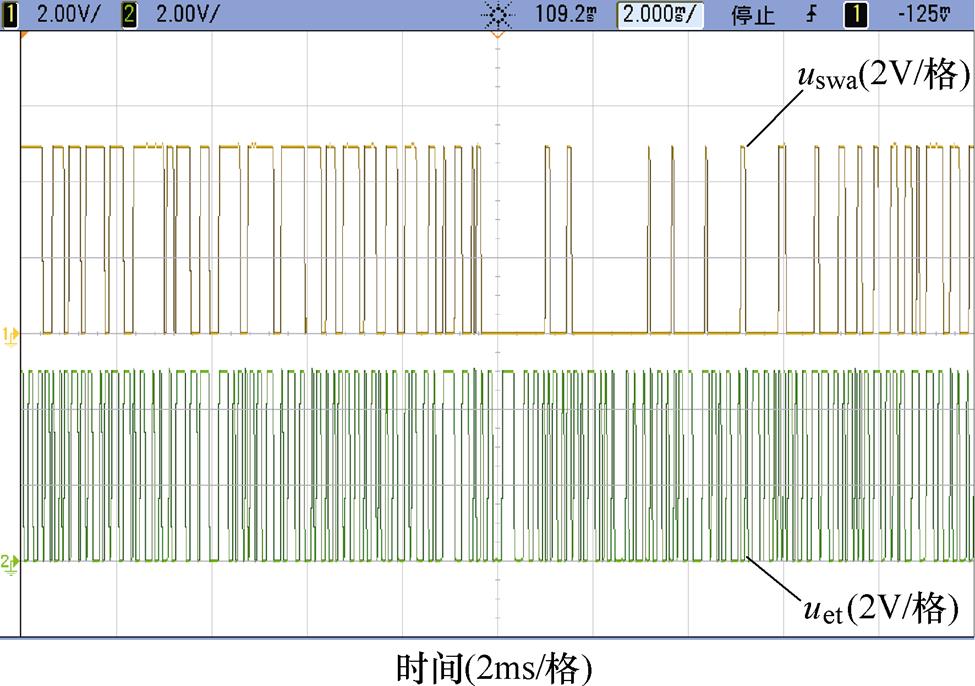
图19 DET-MPC事件触发结果
Fig.19 Results of events triggered of DET-MPC
在图18中,SET-MPC在一个工频周期内进行模型预测控制计算次数明显少于传统FCS-MPC。在一个工频周期内,事件触发次数=232,而开关次数=40。SET-MPC大大减少了不必要的模型预测计算,降低了系统计算负担,也降低了一定的开关次数。
在图19中,DET-MPC在一个工频周期时间内动态事件触发次数=216,也明显少于FCS-MPC导致的触发次数,同时其开关次数=39。其触发次数及开关次数都略小于SET-MPC控制算法的数据。结果表明,DET-MPC在保证系统满意的控制性能前提下,能有效地减少系统计算负担,降低开关损耗。
三种模型控制算法的性能对比见表2。
表2 控制算法性能对比
Tab.2 Performance comparison of algorithms
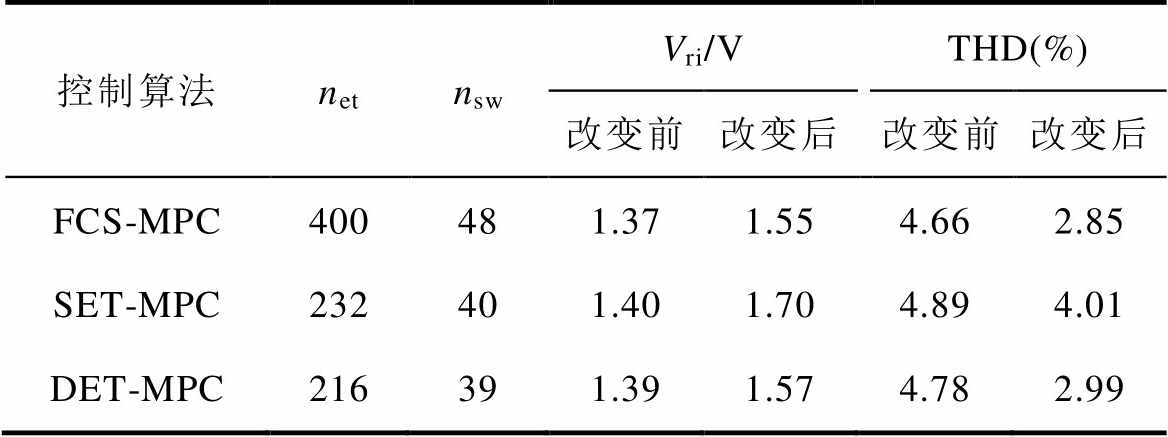
控制算法netnswVri/VTHD(%) 改变前改变后改变前改变后 FCS-MPC400481.371.554.662.85 SET-MPC232401.401.704.894.01 DET-MPC216391.391.574.782.99
从实验结果可知,在系统设定直流电压为700V时,三种控制算法性能相近,但SET-MPC和DET- MPC在模型计算次数以及开关次数方面明显少于传统的FCS-MPC,而在系统直流设定电压从700V切换到800V后,DET-MPC能有效地调节触发条件阈值,使得系统性能更接近于传统FCS-MPC的性能,相比于SET-MPC其电流THD更小,说明DET- MPC在系统状态切换后的事件触发条件更能保证系统的稳态性能。
本文提出了一种应用于Vienna整流器的动态事件触发模型预测控制策略,通过事件触发控制减少传统模型预测控制对计算资源的过度占用,只有当系统状态满足事件触发条件时,才进行后续的模型预测计算,否则将保持之前时刻的开关输出状态,减少开关损耗;而在事件触发条件中引入动态变量,当系统遭遇扰动而引起系统状态变化时,动态事件触发条件能根据新的系统状态及时调整,相较于静止事件触发模型预测控制能在各系统状态下提供更好的系统稳态性能。实验结果表明,所提DET-MPC在减少计算负担以及开关损耗的同时仍能保证满意的系统稳态控制性能。
参考文献
[1] Ding Wenlong, Zhang Chenghui, Gao Feng, et al. A zero-sequence component injection modulation with compensation for current harmonic mitigation of Vienna rectifier[J]. IEEE Transactions on Power Electronics, 2019, 34(1): 801-814.
[2] 李春杰, 黄文新, 卜飞飞, 等. 电动汽车充电与驱动集成化拓扑[J]. 电工技术学报, 2017, 32(12): 138-145.
Li Chunjie, Huang Wenxin, Bu Feifei, et al. The integrated topology of charging and drive for electric vehicles[J]. Transactions of China Electrotechnical Society, 2017, 32(12): 138-145.
[3] Zhu Wenjie, Chen Changsong, Duan Shanxu, et al. Carrier-based discontinuous PWM method with varying clamped area for Vienna rectifier[J]. IEEE Transactions on Industrial Electronics, 2019, 66(9): 7177-7188.
[4] 常伟, 王久和, 陈启丽. 基于NSGA-Ⅱ算法Vienna整流器多目标优化[J]. 中国电机工程学报, 2016, 36(增刊1): 179-185.
Chang Wei, Wang Jiuhe, Chen Qili. Multi-objective optimization of Vienna rectifier based on NSGA-Ⅱ algorithm[J]. Proceedings of the CSEE, 2016, 36(S1): 179-185.
[5] 邹宇航, 张犁, 赵瑞, 等. 三相Vienna整流器的不连续空间矢量脉宽调制及电压谐波分析方法[J]. 中国电机工程学报, 2020, 40(24): 8123-8130.
Zou Yuhang, Zhang Li, Zhao Rui, et al. Dis- continuous pulse width modulation and voltage harmonic analysis method for three-phase Vienna- type rectifiers[J]. Proceedings of the CSEE, 2020, 40(24): 8123-8130.
[6] Khaligh A, Dusmez S. Comprehensive topological analysis of conductive and inductive charging solutions for plug-in electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2012, 61(8): 3475-3489.
[7] 朱文杰, 陈昌松, 段善旭. 一种基于离散空间矢量调制的Vienna整流器模型预测控制方法[J]. 中国电机工程学报, 2019, 39(20): 6008-6016.
Zhu Wenjie, Chen Changsong, Duan Shanxu. A model predictive control method with discrete space vector modulation of Vienna rectifier[J]. Proceedings of the CSEE, 2019, 39(20): 6008-6016.
[8] 年珩, 叶余桦. 三端口隔离双向DC-DC变换器模型预测控制技术[J]. 电工技术学报, 2020, 35(16): 3478-3488.
Nian Heng, Ye Yuhua. Model predictive control of three-port isolated bidirectional DC-DC converter[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3478-3488.
[9] 党超亮, 同向前, 黄晶晶, 等. 基于降阶模型的三相Vienna整流器交流级联稳定性分析[J]. 电力自动化设备, 2018, 38(10): 133-139.
Dang Chaoliang, Tong Xiangqian, Huang Jingjing, et al. Stability analysis of three-phase Vienna rectifier AC cascade system based on reduced order model[J]. Electric Power Automation Equipment, 2018, 38(10): 133-139.
[10] 柳志飞, 杜贵平, 杜发达. 有限集模型预测控制在电力电子系统中的研究现状和发展趋势[J]. 电工技术学报, 2017, 32(22): 58-69.
Liu Zhifei, Du Guiping, Du Fada. Research status and development trend of finite control set model predictive control in power electronics[J]. Transa- ctions of China Electrotechnical Society, 2017, 32(22): 58-69.
[11] Rodriguez J, Kazmierkowski M P, Espinoza J R, et al. State of the art of finite control set model predictive control in power electronics[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 1003-1016.
[12] 王祯, 尹项根, 陈玉, 等. 基于连续控制集模型预测控制的MMC桥臂电流控制策略[J]. 电力系统自动化, 2020, 44(10): 85-91.
Wang Zhen, Yin Xianggen, Chen Yu, et al. Arm current control strategy of modular multilevel converter based on continuous control set model predictive control[J]. Automation of Electric Power Systems, 2020, 44(10): 85-91.
[13] Kouro S, Cortes P, Vargas R, et al. Model predictive control-a simple and powerful method to control power converters[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6): 1826-1838.
[14] 杨兴武, 徐依明, 杨帆, 等. 模块化多电平换流器有限状态分层模型预测控制方法[J]. 电力系统自动化, 2020, 44(15): 148-155.
Yang Xingwu, Xu Yiming, Yang Fan, et al. Hierarchical model predictive control method based on finite state for modular multilevel converter[J]. Automation of Electric Power Systems, 2020, 44(15): 148-155.
[15] Liu Xing, Qiu Lin, Fang Youtong, et al. Finite- level-state model predictive control for sensorless three-phase four-arm modular multilevel converter[J]. IEEE Transactions on Power Electronics, 2020, 35(5): 4462-4466.
[16] Huang Jingjing, Yang Bo, Guo Fanghong, et al. Priority sorting approach for modular multilevel converter based on simplified model predictive control[J]. IEEE Transaction on Industrial Electronics, 2018, 65(6): 4819-4830.
[17] 邹甲, 王聪, 程红, 等. 三相线电压级联VIENNA变换器调制及直流侧电压控制[J]. 电工技术学报, 2018, 33(16): 3835-3844.
Zou Jia, Wang Cong, Cheng Hong, et al. Research on modulation strategy and balance control for DC-Link voltages in triple line-voltage vascaded VIENNA converter[J]. Transactions of China Electrotechnical Society, 2018, 33(16): 3835-3844.
[18] 朱文杰, 陈昌松, 段善旭. 一种改善Vienna整流器输入电流品质的载波钳位调制方法[J]. 电工技术学报, 2019, 34(8): 1677-1688.
Zhu Wenjie, Chen Changsong, Duan Shanxu. A carrier-based modulation method with clamped area for input current performance of Vienna rectifier[J]. Transactions of China Electrotechnical Society, 2019, 34(8): 1677-1688.
[19] 张永昌, 杨海涛, 魏香龙. 基于快速矢量选择的永磁同步电机模型预测控制[J]. 电工技术学报, 2016, 31(6): 66-73.
Zhang Yongchang, Yang Haitao, Wei Xianglong. Model predictive control of permanent magnet synchronous motors based on fast vector selection[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 66-73.
[20] Duran M J, Prieto J, Barrero F, et al. Predictive current control of dual three-phase drives using restrained search techniques[J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3253-3263.
[21] Li Xing, Sun Yao, Wang Hui, et al. A hybrid control scheme for three-phase Vienna rectifiers[J]. IEEE Transactions on Power Electronics, 2018, 33(1): 629- 640.
[22] Lee J S, Lee K B. Predictive control of Vienna rectifiers for PMSG systems[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 2580-2591.
[23] Tabuada P. Event-triggered real-time scheduling of stabilizing control tasks[J]. IEEE Transactions on Automatic Control, 2007, 52(9): 1680-1685.
[24] 郭伟, 赵洪山. 基于事件触发机制的直流微电网多混合储能系统分层协调控制方法[J]. 电工技术学报, 2020, 35(5): 1140-1151.
Guo Wei, Zhao Hongshan. Coordinated control method of multiple hybrid energy storage system in DC microgrid based on event-triggered mechanism[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 1140-1151.
[25] Wang Benfei, Huang Jingjing, Wen Changyun, et al. Event-triggered model predictive control for power converters[J]. IEEE Transactions on Industrial Elec- tronic, 2021, 68(1): 715-720.
[26] Gao Yongfeng, Wang Rui, Wen Changyun, et al. Digital event-based control for nonlinear systems without the limit of ISS[J]. IEEE Transactions on Circuits and Systems: Express Briefs, 2017, 64(7): 807-811.
[27] Ge Xiaohua, Han Qinglong, Wang Zidong. A dynamic event-triggered transmission scheme for distributed set-membership estimation over wireless sensor net- works[J]. IEEE Transactions on Cybernetics, 2019, 49(1): 171-183.
[28] Romain P, Paulo T, Dragan N, et al. A framework for the event-triggered stabilization of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2015, 60(4): 982-996.
[29] Li Qi, Shen Bo, Wang Zidong, et al. Synchronization control for a class of discrete time-delay complex dynamical networks: a dynamic event-triggered approach[J]. IEEE Transactions on Cybernetics, 2019, 49(5): 1979-1986.
[30] Antoine G. Dynamic triggering mechanisms for event-triggered control[J]. IEEE Transactions on Automatic Control, 2015, 60(7): 1992-1997.
Dynamic Event-Triggered Model Predictive Control for Vienna Rectifier
Abstract A dynamic event-triggered model predictive control (DET-MPC) strategy is proposed for the Vienna rectifier in the DC charging system. In the proposed method, the MPC scheme is carried out only when the event-triggered condition of the system is met. Otherwise, the switch state signal is held to reduce the calculation burden. Meanwhile, a dynamic function is introduced into the event-triggered condition to guarantee the steady-state performance of the system. Compared with the conventional finite control set model predictive control, the DET-MPC has advantages of less computational burden and less switching losses, while ensuring satisfactory regulation performance. The experimental results in the three-phase Vienna rectifier from the comparison with FCS-MPC demonstrate the effectiveness of the proposed DET-MPC method.
keywords:Vienna rectifier, model predictive control, dynamic event-triggered, DC charge system
DOI: 10.19595/j.cnki.1000-6753.tces.210420
中图分类号:TM461
周运红 男,1994年生,博士研究生,研究方向为大功率机车充电系统中高性能Vienna整流器关键控制方法。E-mail: zhouyunhong1234yy@126.com
张爱民 女,1962年生,教授,主要研究方向为新能源控制技术、网络化控制系统、自适应鲁棒控制理论及其在柔性输配电系统中的应用。E-mail: zhangam@mail.xjtu.edu.cn(通信作者)
收稿日期 2021-03-28
改稿日期 2021-07-21
国家重点研发计划(2016YFF0201205)、四川省科技计划(2021YJ0490)和陕西省技术创新引导计划(2020TG-011)资助项目。
(编辑 陈 诚)