 (1)
(1)
式中,Vm为星形电压幅值;w 为供电电源角频率。
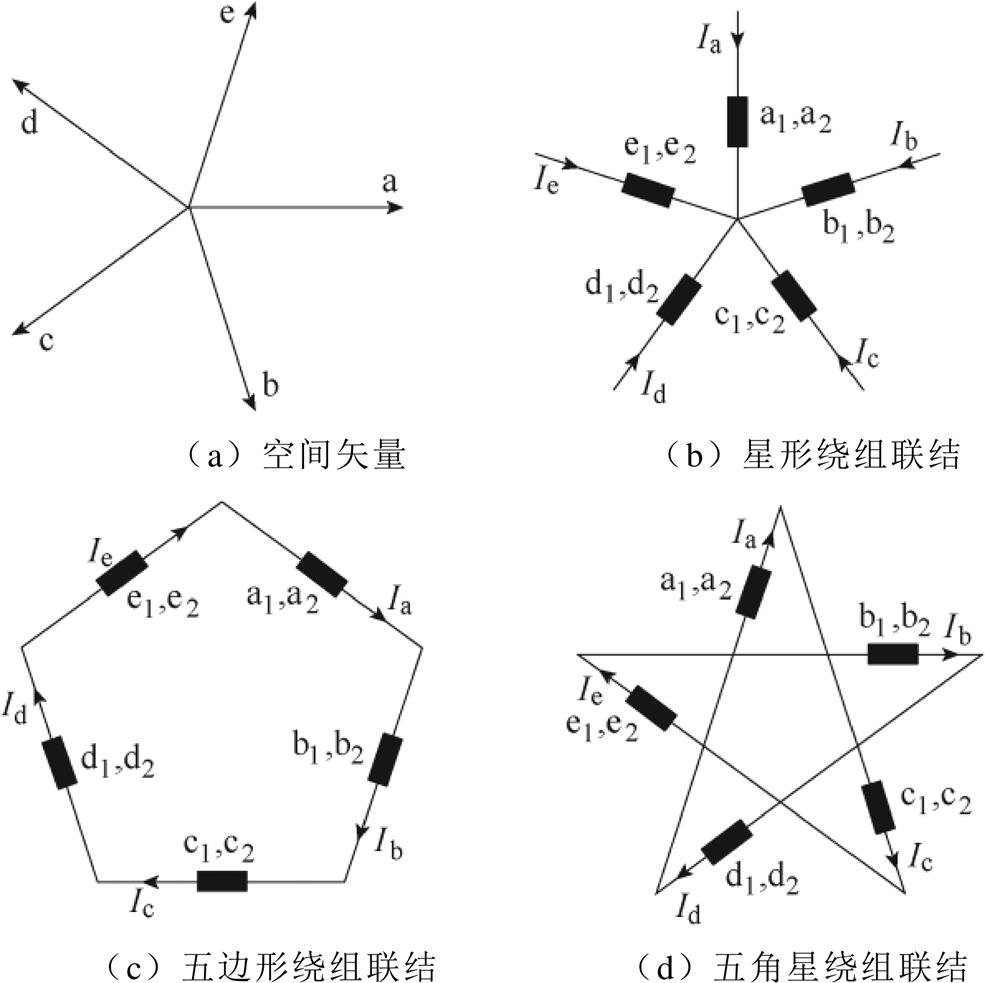
图1 单绕组联结方式
Fig.1 The single winding connection modes
摘要 为研究不同绕组结构对五相电机的影响,在现行单绕组及星形-五边形组合绕组的基础上,该文提出三种新型组合绕组:五边形-星形绕组、五角星-星形绕组与星形-五角星绕组。首先,建立绕组磁动势模型与电压不平衡系数(VUF)计算模型,利用有限元方法计算电机绕组磁动势(MMF)谐波含量、电压不平衡系数。其次,制作15kW五相感应电机,并以此为样机对不同绕组结构五相感应电机开路故障下的稳态性能进行分析。仿真及实验结果表明,对于单绕组结构,开路状态下五边形绕组最有利于电机运行;而对于组合式绕组,该文提出的五边形-星形绕组相比于现行的星形-五边形绕组,既有磁动势谐波含量低的优点,又可以进一步减小电压不平衡系数,提高可带负载转矩,更有利于电机在开路情况下运行。
关键词:五相电机 组合绕组 开路故障 最大转矩倍数 电压不平衡系数
随着大功率电力电子技术的不断发展,感应电机具有的结构简单、运行可靠、维修便捷、起动性能好和调速范围广等特点[1]。大容量的多相感应电机在航空、船舶、电动汽车等领域的备受关注[2-4]。电机作为驱动系统中的重要组成部分,其性能对系统的稳定性具有重要影响。五相电机具有转矩波动小、效率高、容错性能好等优点[5]。对比六相电机[6-7],五相电机故障后能提供更大的负载转矩,电机一相开路并采取最优电流控制时,所带负载可以达到额定负载的70%[8]。近年来,对于五相电机的研究开始走热,并集中在电机的容错控制、减小转矩脉动方面[9-10]。但关于五相电机绕组理论方面的研究国内少之又少,且针对五相电机的研究多集中在星形绕组,对其他绕组联结方式五相电机的研究十分有 限[11-12]。目前,五相电机领域处于技术发展期,对五相电机的研究具有重要的理论价值和实际意义。
五相电机有三种单绕组联结方式[13-14],不同绕组联结方式五相电机在发生开路故障下的容错性能不同。S. A. Ayman等通过对比在正常运行和一相开路情况下采用开环控制和最优电流控制方法时星形绕组与五边形绕组的特性曲线,证明星形绕组在健康运行时铜耗小,五边形绕组在一相开路下降额系数小[15],但该研究没有涉及五角星绕组,对一相开路下三种单绕组联结方式五相电机的研究并不充分。I. M. Mahmoud等证明了单绕组中五边形绕组发生开路故障后的电压不平衡系数(Voltage Unbalanced Factor, VUF)最小[16],但仅考虑电压不平衡系数不能综合评价三种单绕组在开路情况下的容错性能,需多个开路故障下参数综合进行判断。Z. Pavel等通过分析电机定转子电流在矢量空间的运动轨迹,推导出一相开路下五角星绕组感应电机电磁转矩脉动的波形[17],该方法应用于星形绕组与五边形绕组还未有相关成果。为综合不同绕组联结五相绕组的优点,将两条绕组支路在空间上相差一定角度构成组合绕组视为一种研究方向。
目前,针对五相电机组合绕组的文献还较少。S. A. Ayman等为了使电机同时具有星形绕组与五边形绕组的优点,通过将电机绕组分为两套绕组支路,提出了星形-五边形组合绕组[18]。绕组内部的相带分布与十相绕组相同,外部仅有5个出线端。通过建立电机的稳态模型[19]和动态模型[20],证明一相开路后,这种组合式绕组同时具有星形绕组可消除三阶谐波磁通分量和五边形绕组降额系数小的优点。但根据已有文献,关于五相电机组合绕组的研究局限于星形-组合绕组,通过将两条绕组支路在空间上相差一定角度构成其他形式组合绕组还未有研究涉及。
为充分研究绕组联结方式对五相感应电机的影响,本文提出五边形-星形绕组、五角星-星形绕组和星形-五角星绕组三种新型组合绕组。以本文制作15kW电机为样机,通过有限元方法计算绕组磁动势(Magnetic Motive Force, MMF)谐波含量及负载状态下一相开路时各绕组磁动势分布;建立了对称分量变换下电机开路后的稳态模型,包括一相开路、相邻两相开路及非相邻两相开路;并基于IEC标准,计算电压不平衡系数。最后通过实验测量各绕组形式电机一相开路后的电流,进而计算出电机磁动势分布。结果表明,组合绕组电机健康运行时磁动势谐波含量更少,相比于现行的星形-五边形绕组,五边形-星形绕组在三种开路情况下开路后的磁动势分布更接近圆形,电压不平衡系数更小,更有利于电机在开路下运行。
五相电机定子绕组根据联结方式分为两类:单绕组和组合绕组。单绕组包括星形绕组、五边形绕组和五角星绕组;组合绕组由在空间上相差一定角度的两条绕组支路构成,内部相带分布与十相绕组相同。为方便表述,将五相绕组分为10条支路:a1、b1、c1、d1、e1和a2、b2、c2、d2、e2。
单绕组各相绕组分别由相应两条支路串联构成,其相位差为72°,联结方式如图1所示。
定义vstar、vpentagon、vpentacle分别为星形绕组、五边形绕组、五角星形绕组相电压。忽略电源谐波分
量,设星形绕组相电压为
(1)
式中,Vm为星形电压幅值;w 为供电电源角频率。
图1 单绕组联结方式
Fig.1 The single winding connection modes
五边形绕组相电压为
 (2)
(2)
五角星绕组相电压为
 (3)
(3)
定义Nstar、Npentagon、Npentacle分别为星形绕组、五边形绕组、五角星形绕组每槽匝数。则
 (4)
(4)
 (5)
(5)
改变两条绕组支路端部连接可构成六种组合绕组模式。但五边形-五角星和五角星-五边形组合模式相应两条支路的电压矢量空间位置相同,不能构成可用的组合绕组。因此,本文只对图2所示四种组合绕组模式进行研究。从空间排列上,a2、b2、c2、d2、e2支路分别滞后于a1、b1、c1、d1、e1支路18°。
定义va1、va2分别为a1绕组、a2绕组支路电压。a1支路的电压为
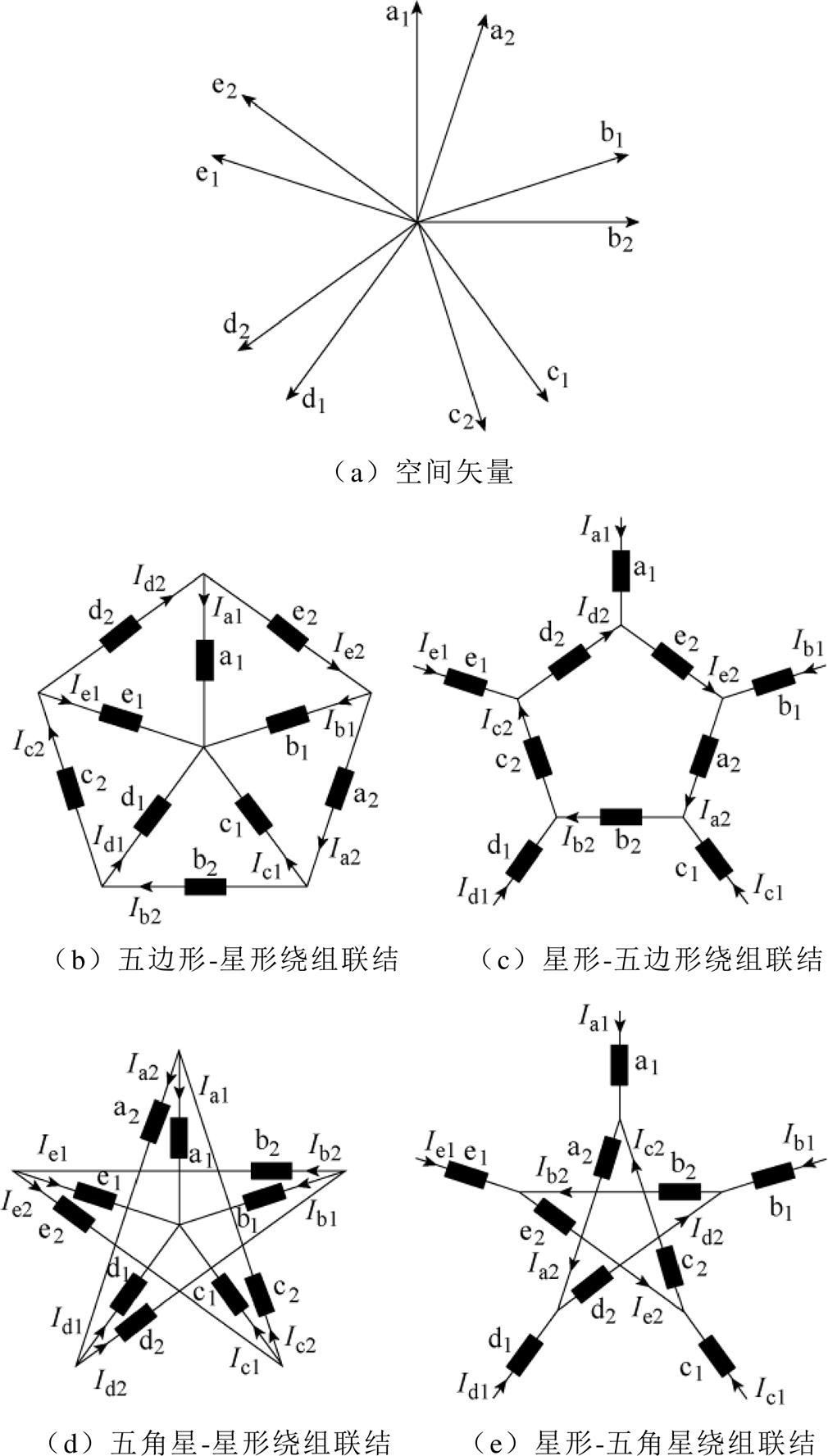
图2 组合绕组联结方式
Fig.2 The combined winding connection modes
 (6)
(6)
为保证两条支路产生的磁动势相同,五边形-星形绕组与星形-五边形绕组中相应两条支路电压关系为
 (7)
(7)
定义Na1、Na2分别为a1绕组、a2绕组每槽匝数。每槽匝数关系为
 (8)
(8)
五角星-星形绕组与星形-五角星绕组的五角星支路电压与星形支路电压关系为
 (9)
(9)
每槽匝数关系为
 (10)
(10)
以额定功率15kW的Y160L-4型三相异步感应电机为基准,保持电机额定功率与定、转子内、外圆尺寸及气隙长度不变的条件下,改变定转子槽数配合以及定转子槽形尺寸,并对定子绕组重新设计,制作了不同绕组结构的五相电机。表1与图3为不同绕组结构的几个规格五相感应电机与原三相感应电机的异同之处。
除表1与图3所示的定转子槽型尺寸外,五相电机样机其余材料与尺寸均与Y160L-4型三相异步感应电机完全一致。
表1 五相电机与原三相电机异同的参数
Tab.1 Differences of parameters between the five-phase motor and the three-phase motor

定子绕组形式单层整距 定/转子槽数40/34 转子斜槽无 槽内导体数 (星形)18 槽内导体数 (五边形)21 槽内导体数 (五角星)34 线规 (星形)/mm2×f1.06, 2×f1.0 线规 (五边形)/mm1×f1.35, 1×f1.40 线规 (五角星)/mm2×f1.06 定子槽满率 (星形)0.78 定子槽满率 (五边形)0.776 定子槽满率 (五角星)0.77
单位: mm
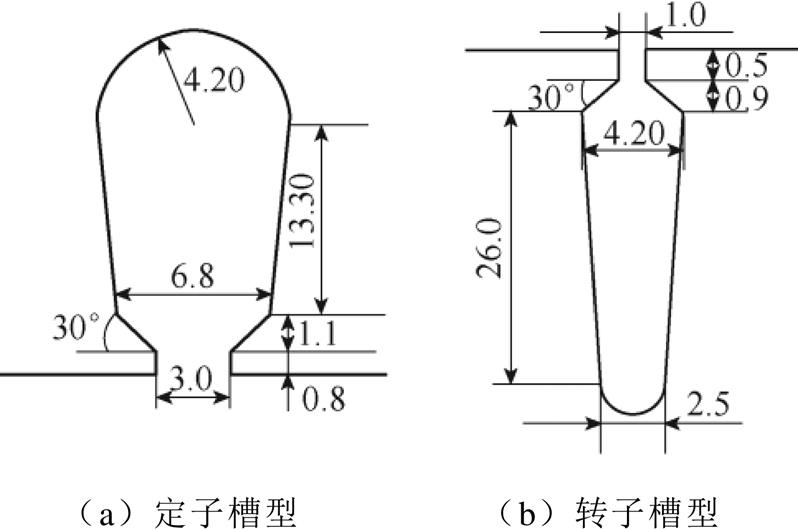
图3 五相电机的定转子槽形
Fig.3 The stator and rotor slots of a five-phase motor
对不同绕组联结方式五相电机健康状态进行仿真,电机磁通密度的有限元仿真模型如图4所示。
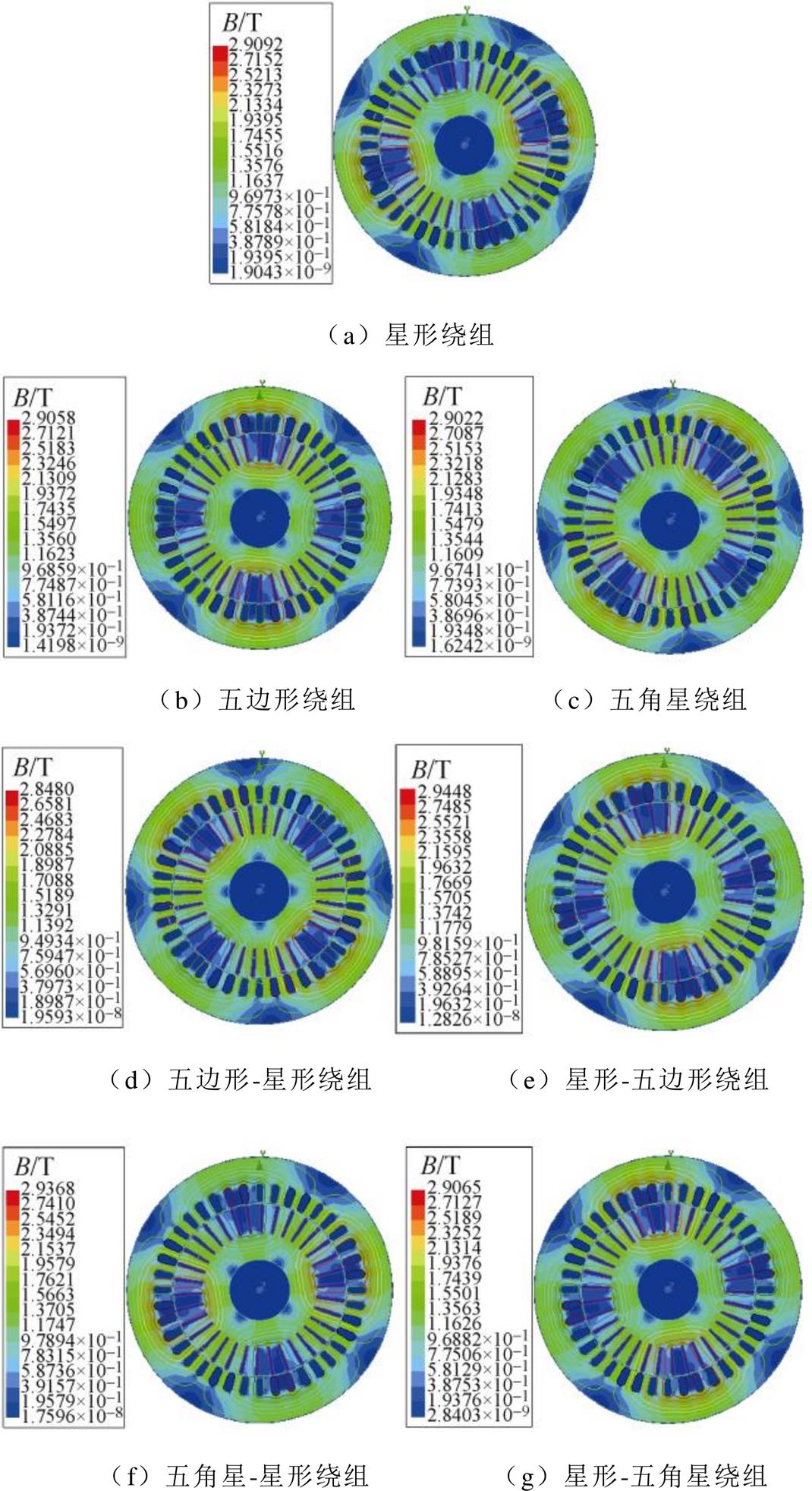
图4 健康运行下磁通密度分布的有限元仿真
Fig.4 Finite element simulation of flux density distribution under healthy condition
为研究绕组联结方式对磁动势谐波含量及磁动势分布的影响,建立各支路绕组函数。单绕组三种联结方式产生的空间谐波相同,每相两条绕组支路具有相同的时间谐波,故三种绕组产生的时空谐波磁动势波形相同。以气隙圆周运动角度q 为横轴,设a1支路在q=0rad的位置,a1支路与a2支路的绕组函数N1(q)、N2(q)如图5所示。
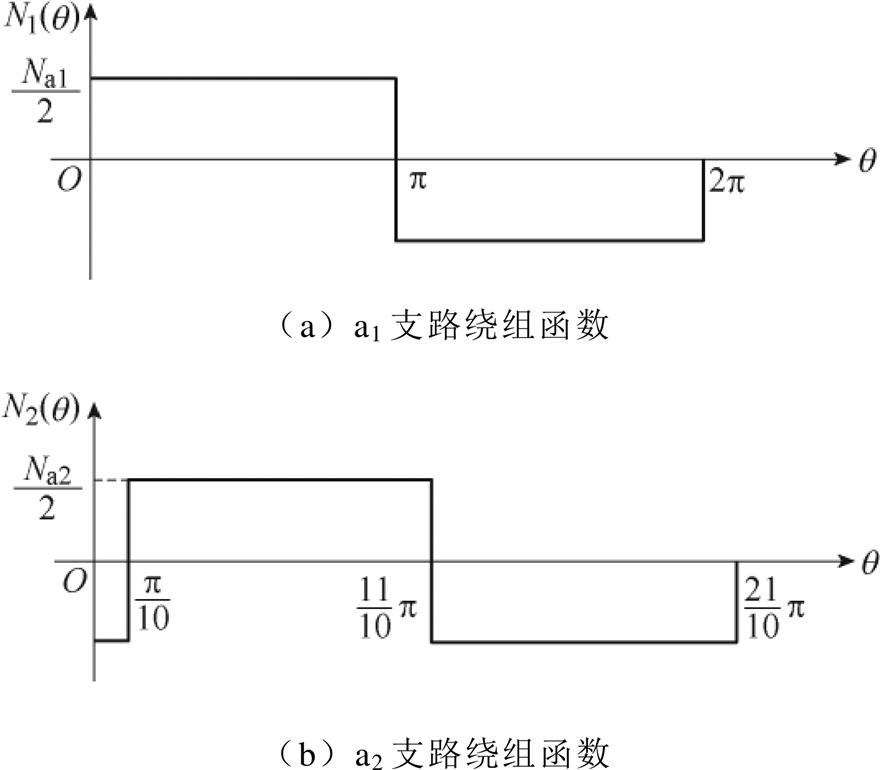
图5 a1与a2支路绕组函数
Fig.5 Winding function for winding a1 and a2
不计电源谐波,单绕组各相绕组电流为
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
 (15)
(15)
式中,Im为单绕组支路电流幅值。
单绕组总磁动势为
 (16)
(16)
式中,F为磁动势; 为谐波次数。
为谐波次数。
对于组合绕组各相支路电流为
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
 (24)
(24)
 (25)
(25)
 (26)
(26)
式中,Im1、Im2分别为a1、a2绕组电流幅值。组合绕组总磁动势为
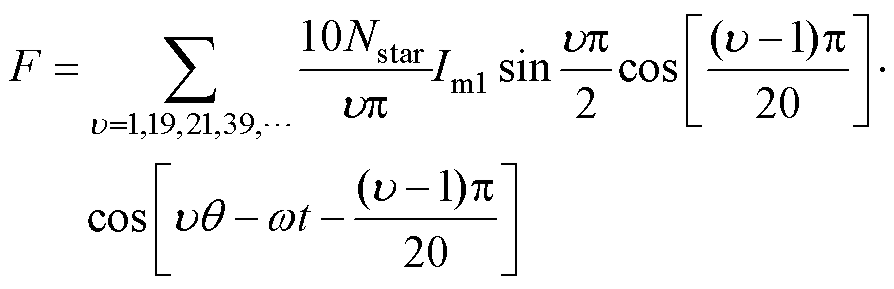 (27)
(27)
以星形绕组基波磁动势为1单位,单绕组与组合绕组气隙磁动势空间谐波含量见表2。
表2 气隙磁动势谐波含量
Tab.2 Air gap MMF harmonic content
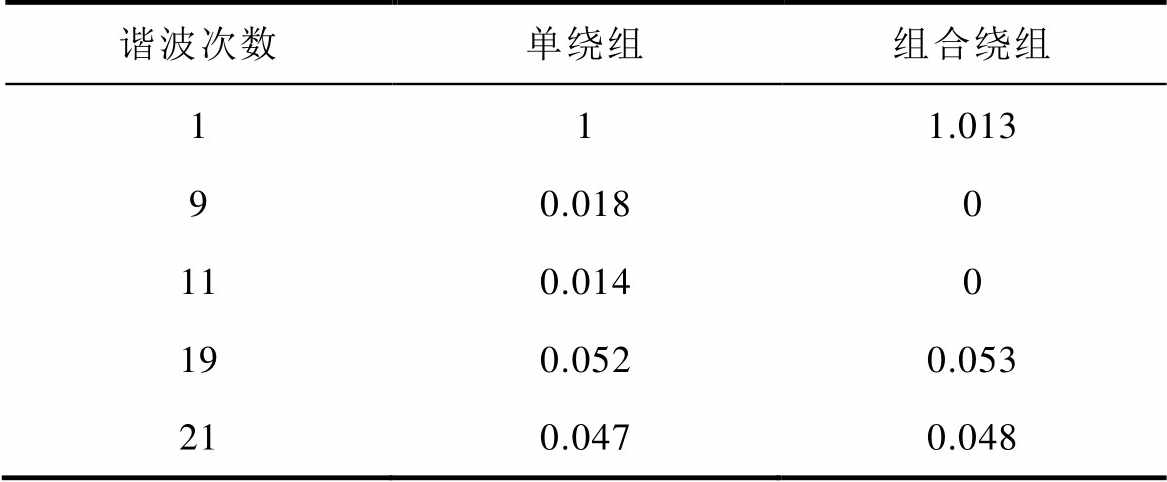
谐波次数单绕组组合绕组 111.013 90.0180 110.0140 190.0520.053 210.0470.048
由表2可知,电机健康运行时,组合绕组的气隙磁动势不包含9次与11次谐波,基波磁动势为单绕组的1.013倍。
一相开路后,电机各相电流不对称,磁动势分布受电流影响不再呈圆形。对电机发生开路后的磁动势分布进行仿真,设电机稳定运行后发生开路故障,负载转矩保持为30N·m。假定一相开路时为E相故障,相邻两相开路时为D相与E相故障,非相邻两相开路时为C相与E相故障。根据有限元方法仿真电机故障后电流,并计算出三种开路故障下的磁动势分布如图6所示。
由磁动势分布可见,组合绕组的磁动势畸变程度与两条支路的磁动势畸变程度呈正相关。受五角星支路的影响,星形与五角星两种组合绕组的磁动势畸变程度高;而受五边形支路的影响,星形与五边形两种组合绕组的磁动势畸变程度低。
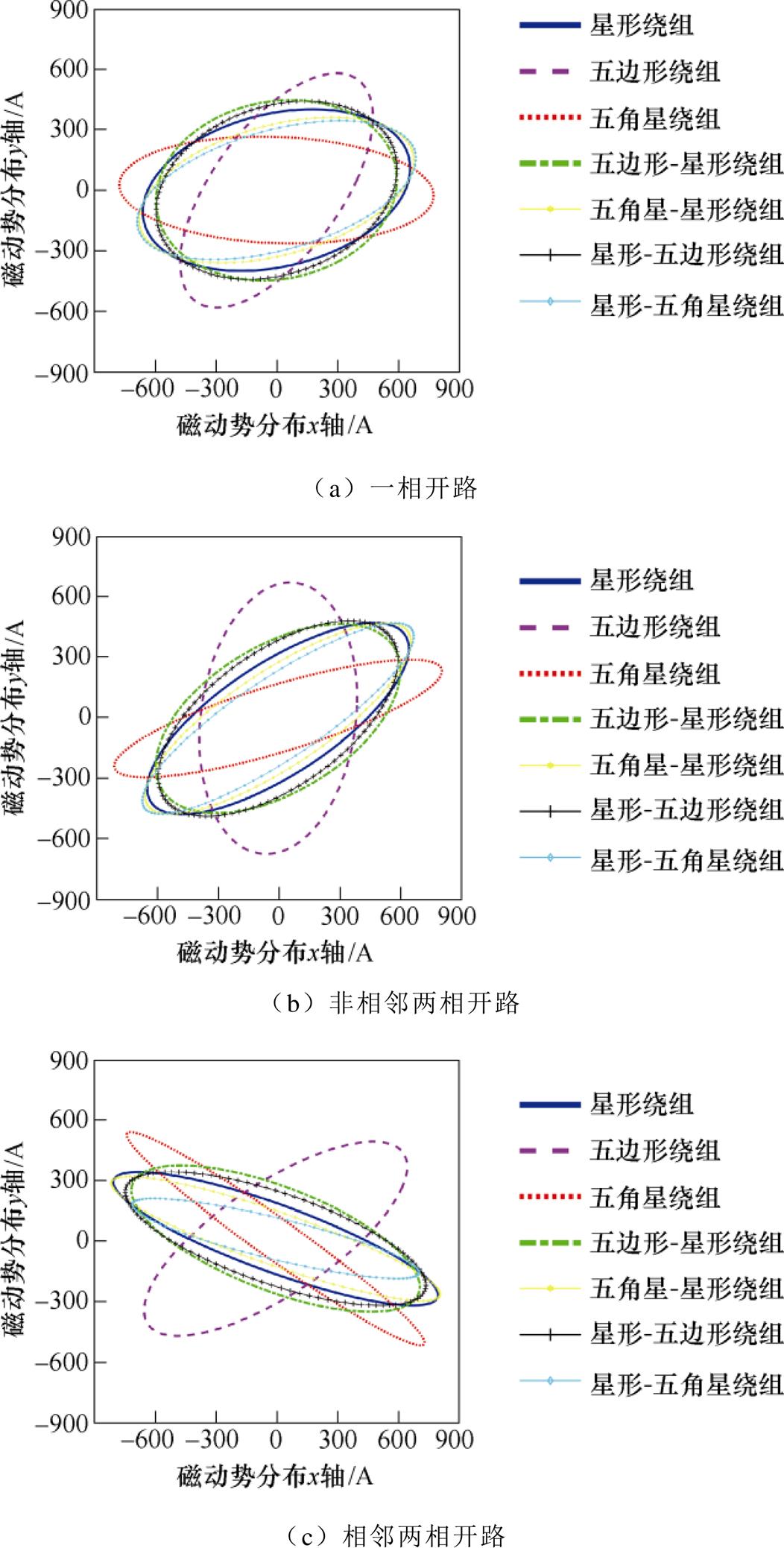
图6 磁动势分布
Fig.6 Distribution of MMF
相比于其他单绕组联结,五边形绕组磁动势三种开路故障状态下的畸变程度低,有利于电机运行。文献[15]证明,星形-五边形绕组在一相开路下既有较好的磁通分布,也具有磁动势谐波含量少的优点;与之相比,本文提出的五边形-星形绕组除了上述优点外进一步减小了电机的磁动势畸变。
电机开路故障后,各支路电压不再对称,以电压不平衡系数来评价电机故障后的表现。根据IEC国际电工委员会给出的电压不平衡系数定义[13],有
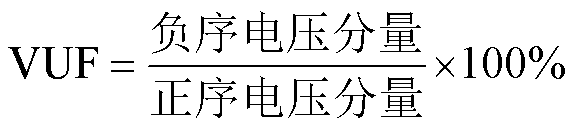 (28)
(28)
采用对称分量变换建立稳态运行数学模型,将对称循环矩阵变为对角阵,各维度的方程为独立关系,构成一端口网络。根据绕组各序向量图,对称分量变换矩阵为
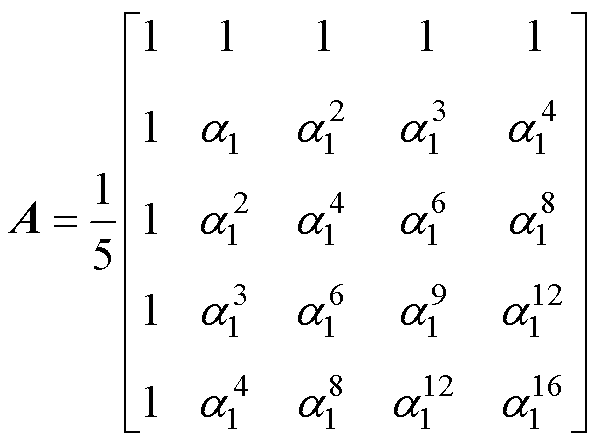 (29)
(29)
式中,A为对称分量变换矩阵;a1为绕组间电角度,a1=2p/5。每相电压和序电压关系为
 (30)
(30)
式中,V0为零序电压分量;V1为正序电压分量;V4为负序电压分量;V2、V3为第三序平面的电压分量;Va~Ve分别为A~E相相电压。
组合绕组相应两条支路电压不同,利用式(29)和式(30)分别计算支路电压不平衡系数,取平均值为组合绕组电压不平衡系数,有
 (31)
(31)
式中,VUF为总电压不平衡系数;VUFw1为第一套绕组电压不平衡系数;VUFw2为第二套绕组电压不平衡系数。
电机开路故障后带载能力降低,为计算电机开路后从空载到最大转矩倍数的电压不平衡系数,先通过有限元方法得出不同绕组联结的电机最大转矩倍数见表3。
表3 最大转矩倍数
Tab.3 Max torque ratio
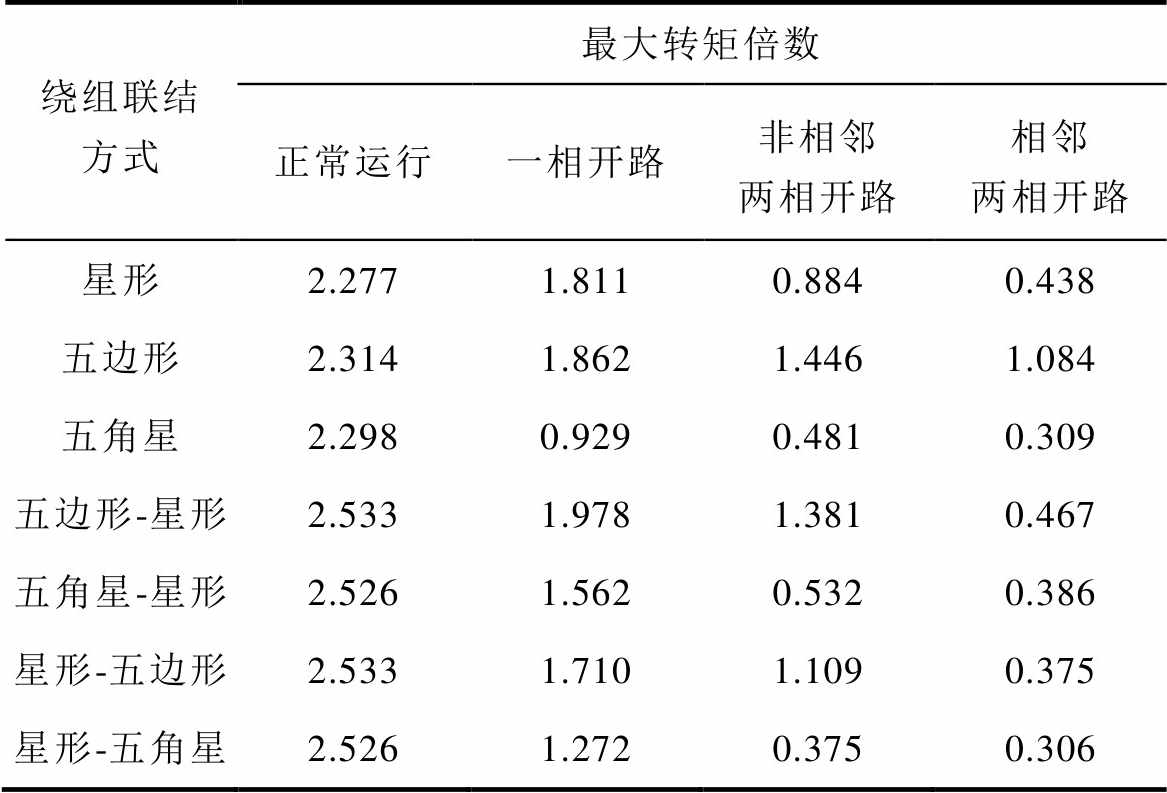
绕组联结方式最大转矩倍数 正常运行一相开路非相邻两相开路相邻两相开路 星形2.2771.8110.8840.438 五边形2.3141.8621.4461.084 五角星2.2980.9290.4810.309 五边形-星形2.5331.9781.3810.467 五角星-星形2.5261.5620.5320.386 星形-五边形2.5331.7101.1090.375 星形-五角星2.5261.2720.3750.306
根据表3计算出三种开路故障下电机从空载到最大转矩倍数的电压不平衡系数曲线如图7所示。
根据表3与图7可知,单绕组联结方式中五边形绕组的最大转矩降额最低、电压不平衡系数最小;组合绕组联结方式中,五边形-星形绕组的最大转矩降额最低、电压不平衡系数最小。总体而言,在三种开路故障状态下,后者稍逊于前者。然而,文献[11]已经证明星形与五边形组合绕组同时具备健康状态星形绕组运行效率高和五边形绕组开路故障时容错能力强的特点,有综合优势。相比之下,本文提出的五边形-星形绕组在三种开路故障状态下都进一步减小了最大转矩倍数的降额及最大电压不平衡系数,更具优势。
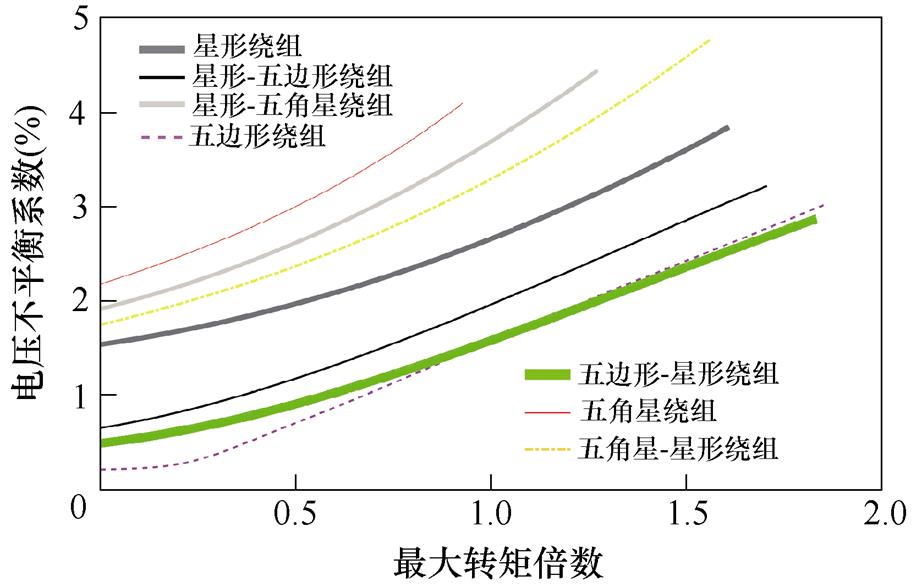
(a)一相开路
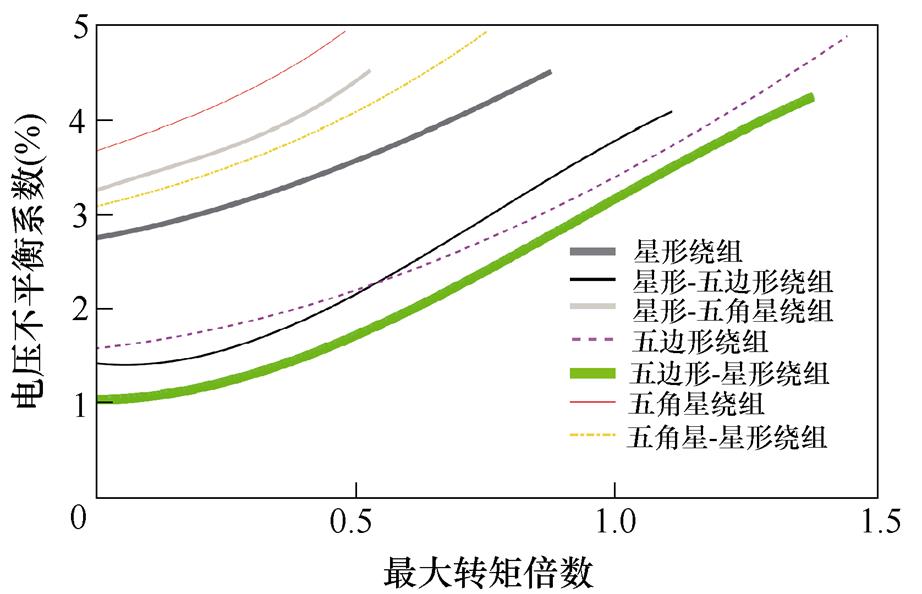
(b)非相邻两相开路
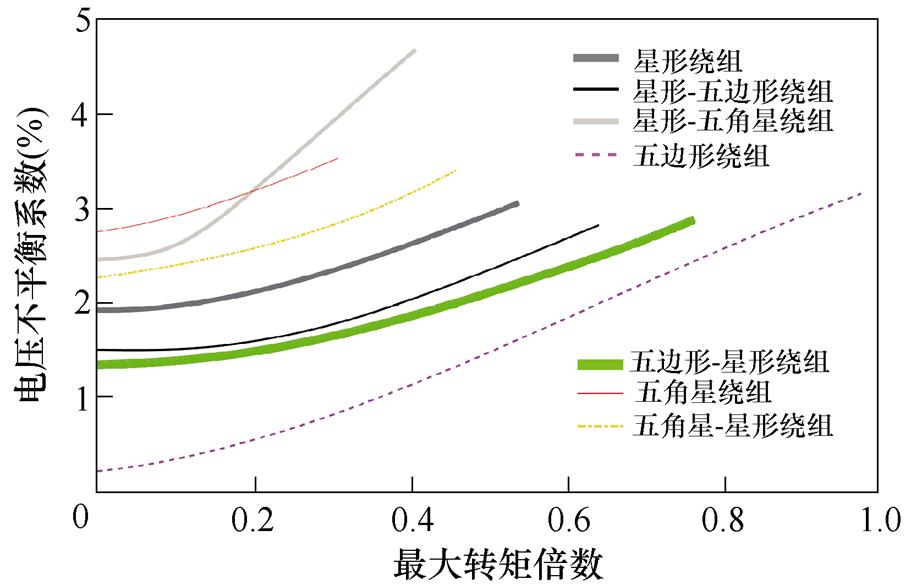
(c)相邻两相开路
图7 电压不平衡系数曲线
Fig.7 Unbalanced voltage factor curves
为验证不同绕组联结方式对五相感应电机的影响,对样机进行一相开路实验,电机所带负载为30N·m。为保证电机额定输出功率为15kW以及符合式(1)~式(3)的相电压关系,各绕组联结方式下变频器供电的线电压分别为:星形绕组、五边形绕组、星形-五边形绕组与星形-五角星绕组为252V;五角星绕组为409V;五边形-星形绕组为126V;五角星-星形绕组为204.5V。电机起动正常稳定运行后,令E相开路,测量电机开路后的稳态电流。五相感应电机实验设备如图8所示。各绕组支路电流如图9所示,并用引线将绕组电流各相引出标记。
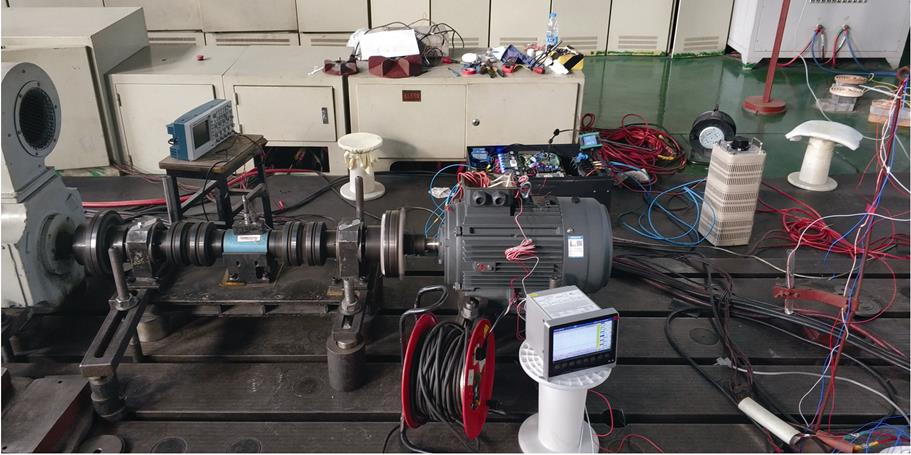
图8 五相感应电机实验设备
Fig.8 Experiment equipment for five-phase motor
图9对由实验设备产生的谐波电流进行处理,根据各相电流值计算出一相开路下电机磁动势分布如图10所示。

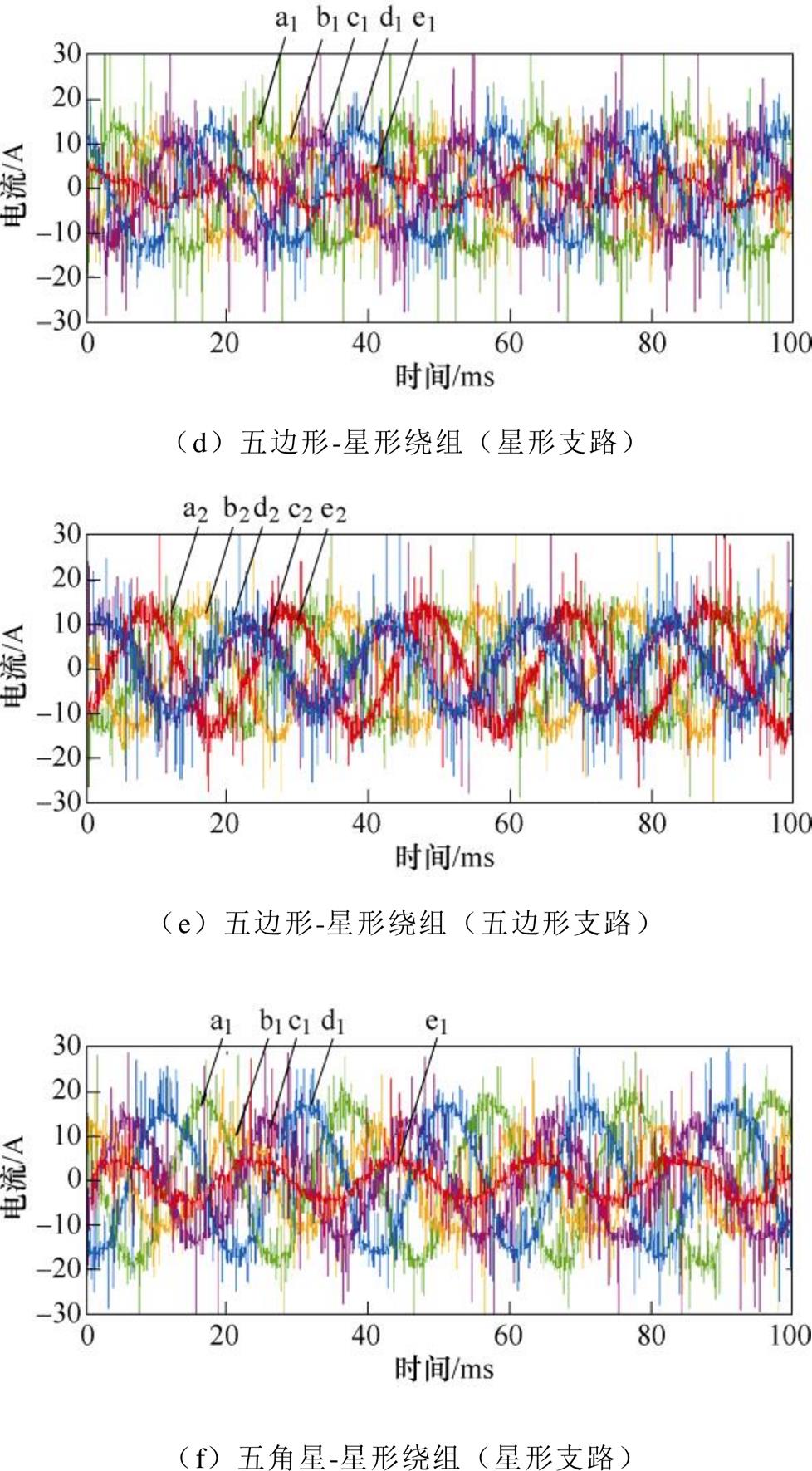
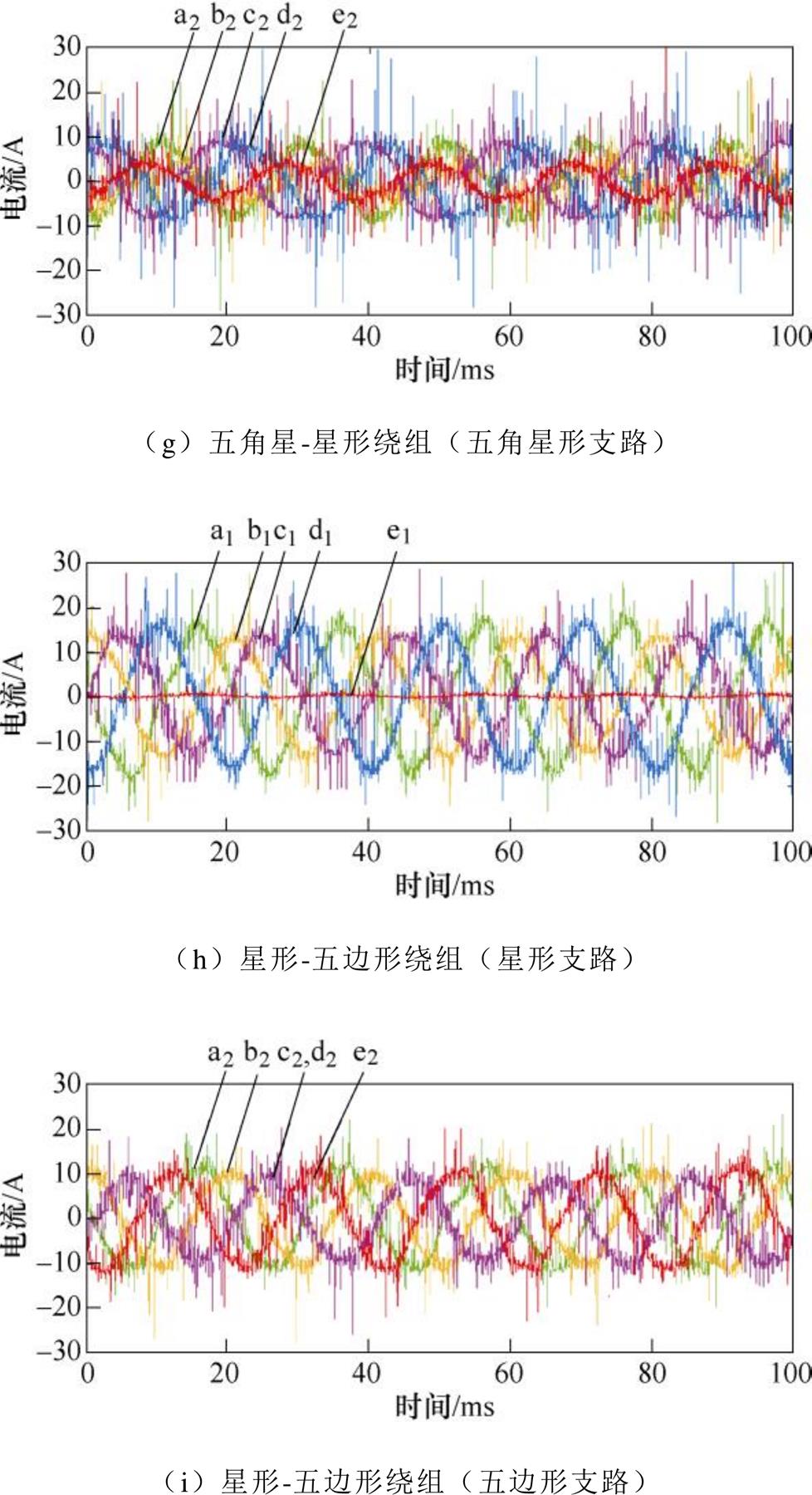
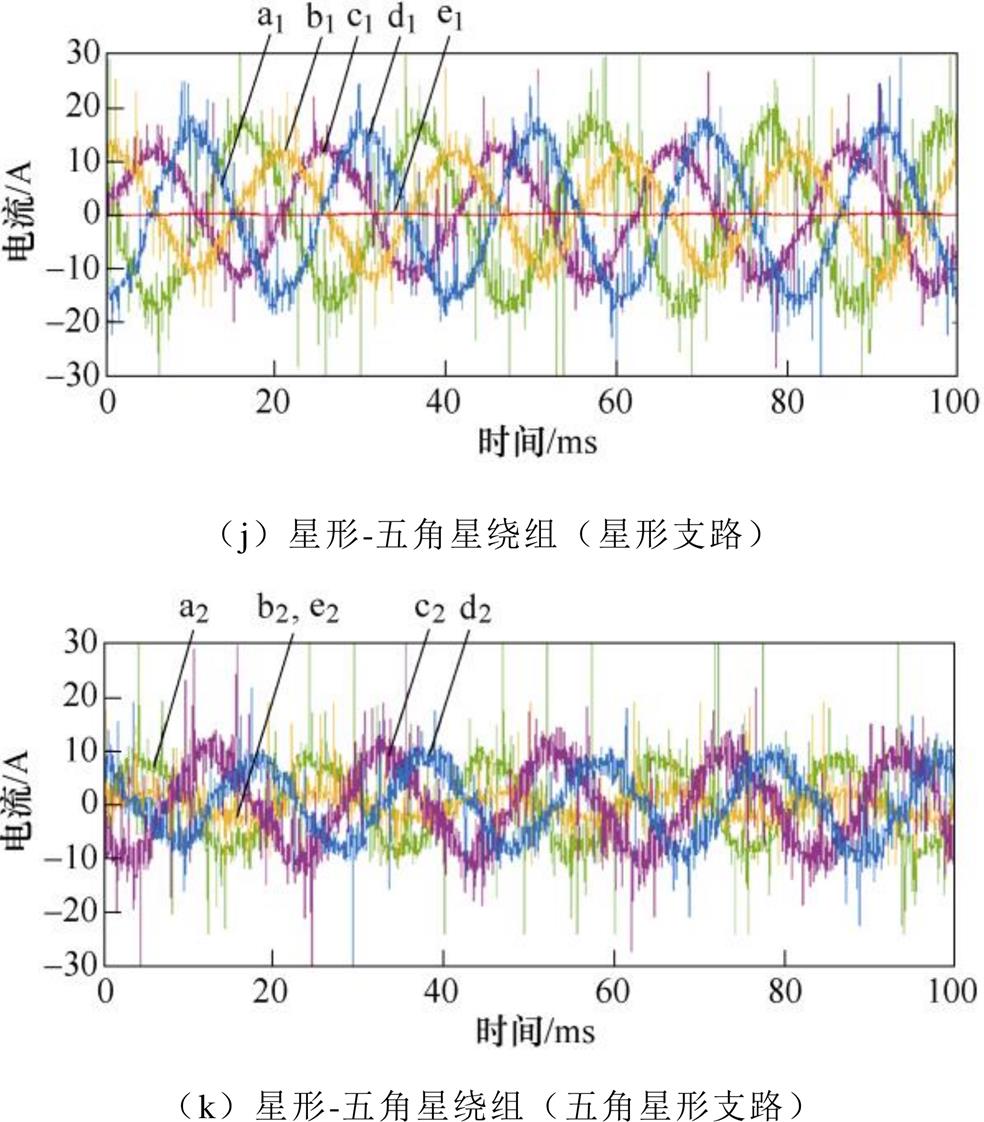
图9 一相开路各支路电流
Fig.9 Each winding current under one-line open circuit
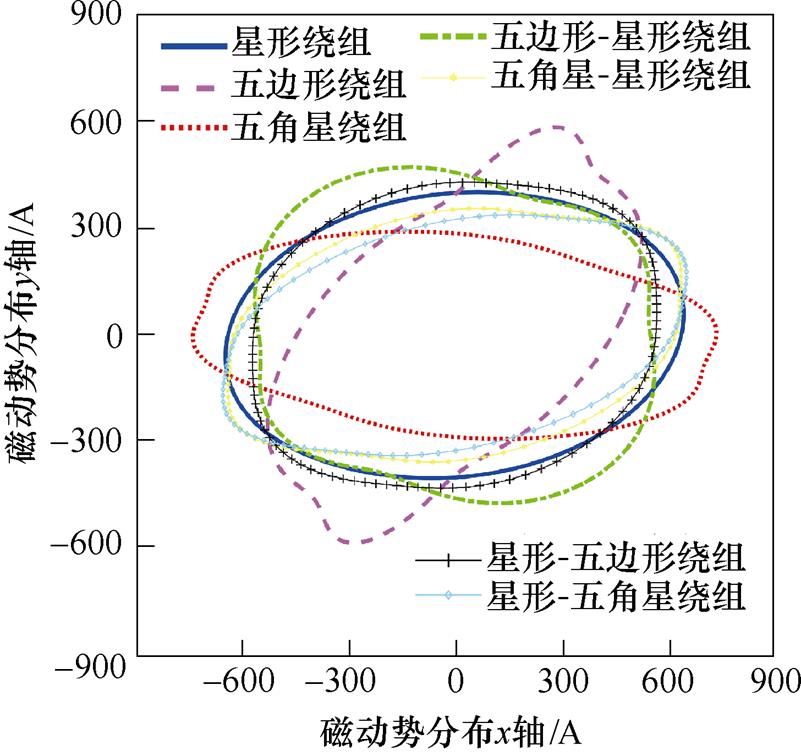
图10 一相开路下磁动势分布
Fig.10 Distribution of magnetomotive force under one-line open circuit
图9中各绕组支路电流表明,电机的供电端断开,电机各相相电压不再对称,各相电流大小不同。一相开路后:星形绕组e1、e2绕组不是通路,电流为0,其他四相绕组不对称,中性点不为0,各相绕组电流幅值不再相等。五边形绕组d1、d2与e1、e2绕组相当于串联,两端电压不为0,两相电流重合。五角星与五边形绕组相似,b1、b2与e1、e2绕组相当于串联,两端电压不为0,两相电流重合。星形-五边形绕组星形绕组支路中,a1相绕组不是通路,电流为0,c2、d2两相绕组串联,电流重合,且各相邻两端电源之间绕组不再对称,各相电流不再对称,幅值不同。星形-五角星绕组与星形-五边形绕组类似,星形支路开路电流为0,b2、e2电流重合,其余各相电流不一致。五边形-星形绕组c2与d2两端电压不为0,绕组中点电位不为0,故绕组e1相电压不为0,e1相电流不为0。五角星-星形绕组与五边形-星形绕组类似,b2与e2两端电压不为0,e1相电压不为0,故e1相电流不为0。
由图10一相开路下磁动势分布对比图6a可知,两者分布大体一致,说明仿真模型与结果是正确的。图10仿真结果包含谐波磁动势,这是由于各绕组联结方式不同。根据图9,一相开路后各相电流中电流大小与相位不对称,电流中的高次谐波电流产生的谐波磁动势不能抵消,叠加在基波磁动势中,导致电机的磁动势分布不为圆形。根据图中的磁动势分布,尽管五边形绕组在电压不平衡系数和最大转矩倍数上有较好的表现,但五边形-星形绕组在仿真下的磁动势畸变程度低于五边形绕组,更有利于电机在故障情况下运行。
本文对五相感应电机各种可行的绕组结构在开路故障状态下进行对比分析,得出以下结论:
1)组合绕组的性能受两条支路的影响,星形与五边形的两种组合相比于星形与五角星的两种组合,在开路故障下前者电压不平衡系数低、最大转矩倍数高、磁动势基波畸变程度小。
2)在三种故障状态下,五边形绕组的最大转矩降额最低、电压不平衡系数最小,五边形-星形组合绕组其次。但总体考虑健康状态与开路故障状态运行的综合评价,星形与五边形组合绕组更具优势。而这两种组合绕组对比,本文提出五边形-星形绕组明显优于现行的星形-五边形绕组。
参考文献
[1] 马伟明. 关于电工学科前沿技术发展的若干思考[J]. 电工技术学报, 2021, 36(22): 4627-4636.
Ma Weiming. Thoughts on the development of frontier technology in electrical engineering[J]. Transactions of China Electrotechnical Society, 2021, 36(22): 4627-4636.
[2] 黄林森, 赵文祥, 吉敬华, 等. 稳态性能改善的双三相永磁电机直接转矩控制[J]. 电工技术学报, 2021, 37(1): 355-367.
Huang Linsen, Zhao Wenxiang, Ji Jinghua, et al. Direct torque control for dual three-phase permanent- magnet machine with improved steady-state perfor- mance[J]. Transactions of China Electrotechnical Society, 2021, 37(1): 355-367.
[3] 卜飞飞, 罗捷, 刘皓喆, 等. 双绕组感应发电机系统无差拍电流预测控制策略[J]. 电工技术学报, 2021, 36(24): 5213-5224.
Bu Feifei, Luo Jie, Liu Haozhe, et al. Deadbeat predictive current control strategy of dual winding induction generator system[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5213-5224.
[4] 韩一, 聂子玲, 许金, 等. 双三相非周期瞬态直线感应电机能量链切换控制策略[J]. 电工技术学报, 2021, 36(1): 258-267.
Han Yi, Nie Ziling, Xu Jin, et al. Energy chain switching control of a dual three-phase linear induction motor operating in non-periodic transient conditions[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 258-267.
[5] 朱鹏, 乔鸣忠, 于飞, 等. 基于磁动势平衡分析的多相感应电机容错控制[J]. 电工技术学报, 2019, 34(增刊1): 62-69.
Zhu Peng, Qiao Mingzhong, Yu Fei, et al. Tolerant control for multi-phase induction motor based on magnetmotive force balance analysis[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 62-69.
[6] 赵勇, 黄文新, 林晓刚, 等. 基于权重系数消除和有限控制集优化的双三相永磁容错电机快速预测直接转矩控制[J]. 电工技术学报, 2021, 36(1): 3-14.
Zhao Yong, Huang Wenxin, Lin Xiaogang, et al. Fast predictive direct torque control of dual three-phase permanent magnet fault tolerant machine based on weighting factor elimination and finite control set optimization[J]. Transactions of China Electrotech- nical Society, 2021, 36(1): 3-14.
[7] 黄守道, 赵礼, 郑剑, 等. 基于加权路径内点法的六相电机SVPWM四矢量调制方法[J]. 电工技术学报, 2019, 34(2): 264-274.
Huang Shoudao, Zhao Li, Zheng Jian, et al. Four- vector modulation method for six-phase motor SVPWM based on interior point algorithm of weighted path[J]. Transactions of China Electro- technical Society, 2019, 34(2): 264-274.
[8] Ayman S A, Shehab A, Ahmed M M. Steady-state equivalent circuit of five-phase induction machines with different stator connections under open-line conditions[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 4651-4662.
[9] 刘海涛, 易新强, 王东, 等. 五相感应电机缺相容错运行的全转矩范围效率优化控制策略[J]. 中国电机工程学报, 2020, 40(5): 1642-1653.
Liu Haitao, Yi Xinqiang, Wang Dong, et al. Optimal efficiency control strategy in full torque range for five-phase induction motor fault tolerant operation[J]. Proceedings of the CSEE, 2020, 40(5): 1642-1653.
[10] Prasoon C M, Rajeevan P P. A space vector based PWM scheme for realization of virtual pentagon, pentacle connections in open-end winding five phase machine drives with single DC source[C]//2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 2018: 1-6.
[11] 陈超, 陈振, 赵静, 等. 基于五相电流源型逆变器的一种新型PMSM就近空间矢量容错组合策略[J]. 电工技术学报, 2020, 35(增刊2): 404-412.
Chen Chao, Chen Zhen, Zhao Jing, et al. A novel PMSM near space vector fault tolerant combination strategy based on five-phase current source inverter[J]. Transactions of China Electrotechnical Society, 2020, 35(S2): 404-412.
[12] 刘国海, 宋成炎, 徐亮, 等. 基于SVPWM的五相永磁同步电机两相开路故障容错控制策略[J]. 电工技术学报, 2019, 34(1): 23-32.
Liu Guohai, Song Chengyan, Xu Liang, et al. SVPWM-based fault-tolerant control strategy under two-phase opencircuit fault of five-phase permanent- magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(1): 23-32.
[13] Sonali C R, Hiralal M S, Bhavika S. Harmonic content testing for different stator winding con- nections of five-phase induction motor[C]//IEEE 6th International Conference on Power Systems (ICPS), New Delhi, India, 2016: 1-5.
[14] Siavash S, Leila P, Hamid A T. Extending speed range of five-phase PM machines by changing the stator windings connections[C]//IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 2011: 1540-1545.
[15] Ayman S A, Ahmed M S, Shehab A, et al. Effect of stator winding connection on performance of five- phase induction machines[J]. IEEE Transactions on Industrial Electronics, 2014, 61(1): 3-19.
[16] Mahmoud I M, Ayman S A, Rashid S A, et al. Effects of unbalanced voltage on the steady-state per- formance of a five-phase induction motor with three different stator winding connections[C]//International Conference on Electrical Machines (ICEM), Berlin, Germany, 2014: 1583-1589.
[17] Pavel Z. Behavior of a five-phase pentacle connected IM operated under one-phase fault[C]//International Aegean Conference on Electrical Machines and Power Electronics (ACEMP) & 2019 International Con- ference on Optimization of Electrical and Electronic Equipment (OPTIM), Istanbul, Turkey, 2019: 126-131.
[18] Ayman S A, Mohamed A E, Shehab A, et al. An improved fault-tolerant five-phase induction machine using a combined star/pentagon single layer stator winding connection[J]. IEEE Transactions on Indu- strial Electronics, 2016, 63(1): 618-628.
[19] Ayman S A, Shehab A, Ahmed M M, Steady-state mathematical modeling of a five-phase induction machine with a combined star/pentagon stator winding connection[J]. IEEE Transactions on Industrial Elec- tronics, 2016, 63(3): 1331-1343.
[20] Ayman S A, Shehab A, Ahmed M M, Dynamic modeling of a five-phase induction machine with a combined star/pentagon stator winding connection[J]. IEEE Transactions on Energy Conversion, 2016, 31(4): 1645-1656.
(编辑 崔文静)
Comparison and Analysis of the Performance of Five-Phase Induction Motors with Different Stator Winding Connections under Open-Circuit Conditions
Abstract Based on the existing single winding and star-pentagon combined winding, this paper proposed three new types of combined windings: pentagon-star winding, pentacal-star winding, and star-pentacal winding, to study the effects of different winding connections on five-phase motors. First, the winding magnetomotive force (MMF) model and the voltage unbalance ratio measurement model were developed. The harmonic content of the motor winding MMF and the voltage unbalance ratio were calculated using the finite element method. Secondly, a 15kW five-phase induction motor was designed. Using this as a prototype, the steady-state output of a five-phase induction motor with various winding connections was investigated under open-circuit faults. According to the simulation and experimental results, the pentagon winding is most beneficial to the motor's operation for the single winding connection under open-circuit faults. Comparing with the existing star-pentagon winding for the combined winding, the pentagon-star winding introduced in this paper not only has a low MMF harmonic content, but can reduce the voltage unbalance ratio and increase the maximum load torque, which is beneficial to the motor running under open-circuit.
keywords:Five-phase motor, combined winding, open-circuit fault, max torque ratio, voltage unbalanced factor (VUF)
DOI: 10.19595/j.cnki.1000-6753.tces.201643
中图分类号:TM343
范舒婷 女,1995年生,博士研究生,研究方向为特种电机的设计及其物理场分析。E-mail: 804296248@qq.com
孟大伟 男,1956年生,教授,博士生导师,研究方向为特种电机CAD及优化设计的理论与应用。E-mail: mengdawei@hrbust.edu.cn(通信作者)
国家自然科学基金(52077047)和黑龙江省自然基金(LH2020E092)资助项目。
收稿日期 2020-12-15
改稿日期 2021-03-02