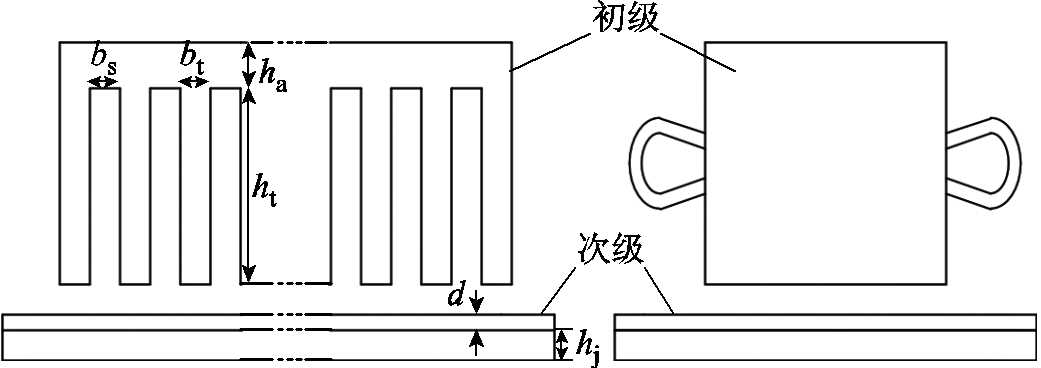
图1 直线感应电机的纵向和横向截面示意图
Fig.1 Longitudinal and transverse sections of LIM
摘要 由于轨道交通用直线感应电机固有的大气隙、端部效应和逆变器谐波等影响,该类电机难以获得较高的效率和功率因数。为克服相关问题,该文提出一种考虑逆变器谐波影响的多层次多目标优化方法。首先,基于传统的基波等效电路,建立考虑逆变器影响的直线感应电机谐波解析模型,进而得到优化目标函数的解析表达式;随后,通过对电机参数敏感性进行分析,明确了七个主要的参数,并将其作为后续的优化变量;然后,为减少优化时间和提高优化效果,该文对皮尔逊系数和方差进行了深入研究,找出了影响电机性能的主要和次要变量,从而将单层优化转化为多层优化;最后,大量仿真和实验结果表明,基于该文优化方法得到的直线感应电机可以提升效率和功率因数约5.0%和12.7%。
关键词:直线感应电机 谐波模型 多目标优化 多层次优化 轨道交通
当前,城市轨道交通系统主要由旋转感应电机驱动,但其依靠滚轮的摩擦力,同时需要齿轮箱、曲柄连杆等中间传动装置,存在体积大、噪声高、维修量大、爬坡能力差、加减速小、选线困难等问题。若采用直线感应电机(Linear Induction Motor, LIM)轨道交通驱动系统(后面简称“直线驱动系统”),它将借助电磁力直接驱动车辆,可省去中间传动装置,从而克服传统旋转感应电机驱动系统存在的缺点[1-3],因而在轨道交通中逐步得到应用。迄今为止,全世界直线驱动系统线路超过30条,尤其在日本和中国应用较多。2005年以来,中国先后建成直线驱动系统6条,包括广州地铁4~6号线、北京机场快轨线、长沙中低速磁悬浮线、北京S1线等,另外还有在建线路多条,成为近年全世界直线驱动系统发展最快的国家之一。
虽然LIM在直线驱动系统中得到大量应用,但受其大气隙和端部效应等影响,该类电机的效率和功率因数明显低于相应的旋转感应电机,其驱动能力亟需进一步提升[4-6]。迄今为止,为提升直线电机的效率和功率因数等关键指标,大量学者从数学建模、降维优化求解、优化效率提升等方面开展了广泛的研究。文献[7]采用遗传算法对LIM的效率和功率因数同时进行优化,电机功效(功率因数和效率乘积)成功提升了12.5%;但因其电机等效模型没有考虑铁耗和次级漏感,随着速度增加,其理论分析和实验测量误差逐步增大。文献[8]建立的LIM等效模型考虑铁耗和次级漏感的影响,并在优化前进行了单参数和双参数敏感性分析,但优化过程仍和传统的单层次多目标优化方法相同。文献[9]采用遗传算法对直线电机性能进行优化,提高了电机功效、降低了初级质量和端部力等。文献[10]提出一种开槽的次级结构,并对开槽的相关参数依次进行优化,一定程度上降低了电机横向端部效应;但因该方法采用单变量逐个优化,很容易陷入局部最优解。文献[11-12]同样采用单个变量逐次优化,并缺少对优化变量的敏感性分析,很难保证优化结果是全局最优值。文献[13-14]从直线电机系统的角度出发,以降低电机和逆变器损耗为目的,同时对电机结构参数和最优控制量进行了优化,取得了一定的效果,但求解过程较为繁琐。
为降低LIM优化模型的难度,文献[15]基于有限元模型和试验点法,得到电机的响应面模型;然后从提高电机功率密度的角度出发,求解得到最优的初级长度与次级导体板厚度的比值。该方法不需要推导LIM等效电路或解析模型,特别适用于结构复杂的LIM,可明显降低优化模型的建立难度[16]。文献[17]利用有限元软件建立电机结构参数模型;然后以高转矩密度和低转矩波动为优化目标,基于敏感性分析对关键尺寸参数进行敏感度分层,并根据参数敏感度分层结果将单参数扫描法和多目标遗传算法等多种优化方法相结合,从而确定电机的最优结构尺寸参数。文献[18-19]分别基于拉丁超立方试验和正交试验表方法,得到直线电机的响应面,从而确定优化模型。文献[20-21]基于Kriging代理模型得到LIM的解析模型,并结合高效全局优化算法的加点准则,可以明显加快算法的收敛速度,从而减少优化时间。
为提升传统多目标优化方法的优化效率,文献[22]通过引入灵敏度指数将优化参数进行分层,对不同层的参数分别采用Box-Behnken试验设计、优化模型方程最小值搜索和单变量参数化方法对电机转矩大小和转矩脉动进行优化设计,在保证优化结果的可靠性与准确性的前提下,明显提升了电机工作效率。文献[23]针对五种典型工况下混合电动汽车用驱动电机,对电机参数进行敏感性分析,确定不同工况下的主要结构参数,把优化过程分为三步,每一步优化不同工况下的关键结构参数和性能指标,从而得到最终优化方案。文献[24]考虑到多目标优化时不同优化目标和参数之间的耦合关系,通过相关性和方差分析,确定影响较大的变量或变量组合,明确不同优化目标之间的关联性,从而有效建立相关优化模型。
在逆变器驱动下,LIM受到脉宽调制(Pulse Width Modulation, PWM)电压和非均匀磁路影响。当输入电压(电流)中包含谐波时,会产生额外的推力波动和损耗,从而对推力、效率和功率因数等驱动性能造成负面影响。如果仍采用传统不考虑谐波影响的基波数学模型来分析和优化电机的性能,会导致理论与实际情况之间存在较大误差。此外,考虑到在城轨交通场合,逆变器由于容量限制导致其开关频率较低,再叠加LIM初次开断和绕组不对称的作用,使得逆变器谐波对LIM影响较传统旋转感应电机(Rotary Induction Motor, RIM)更加突出。
为了同时提高LIM的效率和功率因数,并提升优化速度(减小计算量),本文提出了一种考虑逆变器谐波影响的多层次多目标优化方法。首先,建立了考虑逆变器影响的谐波解析分析模型,从而得出优化变量和优化目标之间的表达式;其次,为减少优化时间和提高优化效果,通过对电机参数进行敏感性分析,找到影响电机性能的主要和次要变量,从而将单层优化问题转化为多层优化问题;然后,采用优化算法对多目标优化问题逐层进行优化及求解;最后,通过大量的有限元仿真和实验,充分验证了优化结果的合理性。
图1为一轨道交通用的平板型LIM的拓扑结构示意图。图1中标注了LIM的主要结构参数,其中ht为初级槽高,bs为初级槽宽,bt为初级齿宽,ha为初级轭高,d为导板厚度,hj为次级轭厚。由图1可看到,因LIM的初级磁路开断,其铁心无法闭合,从而引入了特有的端部和半填充槽,给LIM的解析模型带来了很强的非线性影响,其求解过程相对传统旋转感应电机更为复杂和困难。
图1 直线感应电机的纵向和横向截面示意图
Fig.1 Longitudinal and transverse sections of LIM
为了得到优化目标的数学表达式,需要采用合适的解析模型来评估电机的性能。和LIM传统的基波等效电路类似,本文提出了可以考虑逆变器影响的谐波等效电路,如图2所示。
对于逆变器产生的特定u次时间谐波,都有与之对应的谐波等效电路。由于u次时间谐波的同步速度V1u和基波的同步速度V1满足[25]
 (1)
(1)
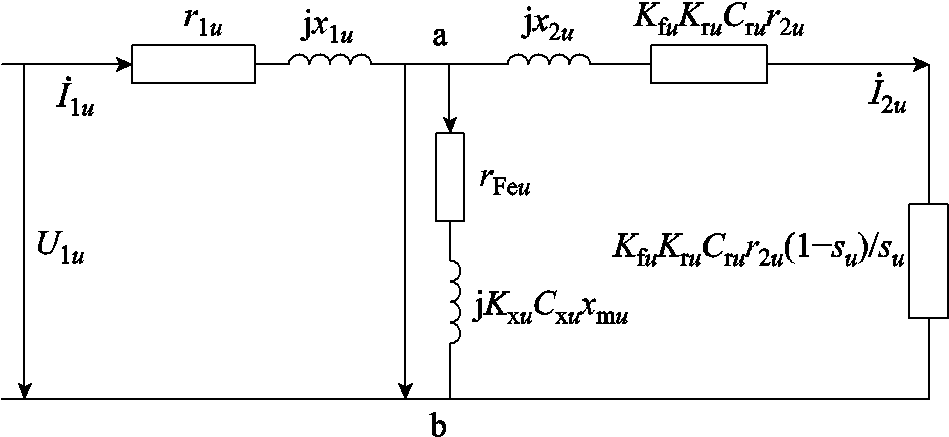
图2 直线感应电机的谐波等效电路
Fig.2 Harmonic equivalent circuits of LIM
因此,LIM相应的谐波转差率su可表述为
 (2)
(2)
式中,s为基波转差率。
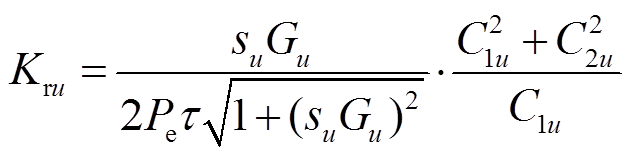
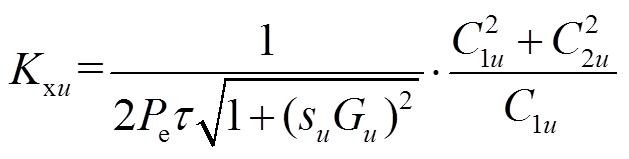
采用文献[1, 3]推导基波等效电路的方法,本文依次对各次时间谐波建立一维和二维解析模型,进而得到考虑端部效应和趋肤效应的修正系数。其中,次级电阻和励磁电感的纵向端部效应修正系数 、
、 分别为
分别为
 (3)
(3)
 (4)
(4)
式中,Gu为谐波品质因数;Pe为等效极对数;t为极距;C1u和C2u为与su、Gu和电机结构参数相关的函数。
次级电阻和励磁电感的横向端部效应修正系数 、Cxu分别为
、Cxu分别为
 (5)
(5)
 (6)
(6)
式中,Tu为与su、Gu和电机结构参数相关的函数。Re和Im分别为复数的实部和虚部。
趋肤效应系数 为
为
 (7)
(7)
式中,A1u和B1u分别为与谐波转差频率和电机结构参数有关的函数;d为次级导板厚度; 为考虑齿槽及磁路饱和影响的等效气隙长度,计算公式为
为考虑齿槽及磁路饱和影响的等效气隙长度,计算公式为
 (8)
(8)
式中,de为机械气隙长度;Ks为卡特系数;Kc为磁路饱和系数,具体计算公式可参考文献[4]。
由于电机功率较小,可忽略初级绕组的趋肤效应,认为两者阻值相等,因此谐波初级电阻的表达式为
 (9)
(9)
式中, 为铜电阻率;lc为单匝绕组长度;W1为每相串联匝数;SCu为单匝绕组截面积。
为铜电阻率;lc为单匝绕组长度;W1为每相串联匝数;SCu为单匝绕组截面积。
谐波初级漏抗和励磁电抗与谐波频率和结构参数有关,可看作相应基波电抗的u倍,其表达式为
 (10)
(10)
 (11)
(11)
式中,fu为谐波频率;a1为初级铁心宽度的一半;q为每极每相槽数; 为极对数;ls、lt、le、ld分别为槽、齿、端部和绕组谐波漏磁导;
为极对数;ls、lt、le、ld分别为槽、齿、端部和绕组谐波漏磁导; 为真空磁导率;KW1为绕组系数。
为真空磁导率;KW1为绕组系数。
谐波次级电阻由谐波次级导板电阻和次级背铁电阻并联而成,其中谐波背铁电阻大小与其谐波透入深度有关,即
 (12)
(12)
式中, 为铁电阻率;
为铁电阻率; 为铁磁导率。因此谐波次级背铁、谐波次级导板和谐波次级电阻分别为
为铁磁导率。因此谐波次级背铁、谐波次级导板和谐波次级电阻分别为
 (13)
(13)
 (14)
(14)
 (15)
(15)
式中, 为次级导板电阻率。
为次级导板电阻率。
进一步,谐波次级漏抗的表达式为
 (16)
(16)
在前面的推导基础上,进一步求得初级、励磁和次级支路的阻抗大小为
 (17)
(17)
 (18)
(18)
 (19)
(19)
整个电路的阻抗为
 (20)
(20)
式中,ju为u次谐波等效电路的功率因数角。
因此,初级、次级电流可分别表示为
 (21)
(21)
 (22)
(22)
基于叠加原理,总电磁力大小为
 (23)
(23)
总有功功率、复功率和功率因数分别为
 (24)
(24)
 (25)
(25)
 (26)
(26)
总铜耗为
 (27)
(27)
忽略初级阻抗压降,初级齿、初级轭和次级轭的谐波铁耗PFetu、PFeau和PFeju分别为
 (28)
(28)
 (29)
(29)
 (30)
(30)
式中,PFet1、PFea1和PFej1分别为初级齿、初级轭和次级轭的基波铁耗,具体计算公式可参考文献[4]。
因此,电机总铁耗 和效率
和效率 可表示为
可表示为
 (31)
(31)
 (32)
(32)
针对城市轨道交通需求,本文选取LIM的额定速度40km/h,并把该点的效率和功率因数作为优化目标。表1为LIM主要结构参数及初始值。根据三水平三因素实验设计原则,本文建立了目标函数的正交试验表,并基于第1节的谐波解析模型得到了电机各个试验点下的性能,见表2。表中的每个组合为7维的向量,值1、2和3分别代表该变量取较小、适中和较大值情况。由表2得知,采用传统的单参数扫描法需37=2 187次试验,而采用正交实验设计后,仅需知道18个点下的响应值即可充分反映电机的整体性能,进而显著减少优化时间。
表1 直线感应电机基本结构参数
Tab.1 Basic structure parameters of LIM
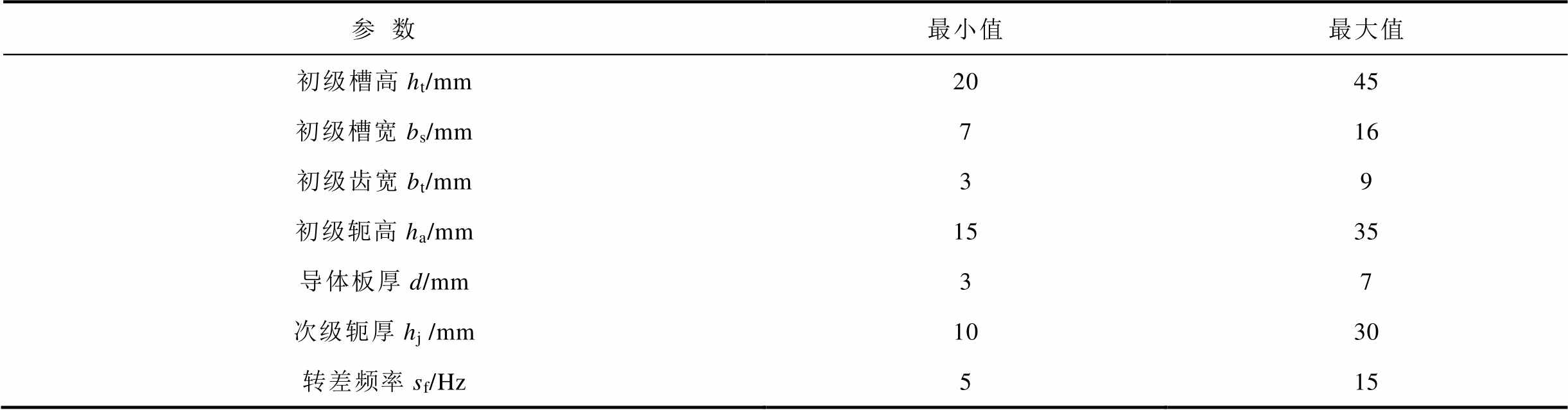
参数最小值最大值 初级槽高ht/mm2045 初级槽宽bs/mm716 初级齿宽bt/mm39 初级轭高ha/mm1535 导体板厚d/mm37 次级轭厚hj /mm1030 转差频率sf/Hz515
表2 正交试验矩阵及试验结果
Tab.2 Orthogonal experimental matrix and results
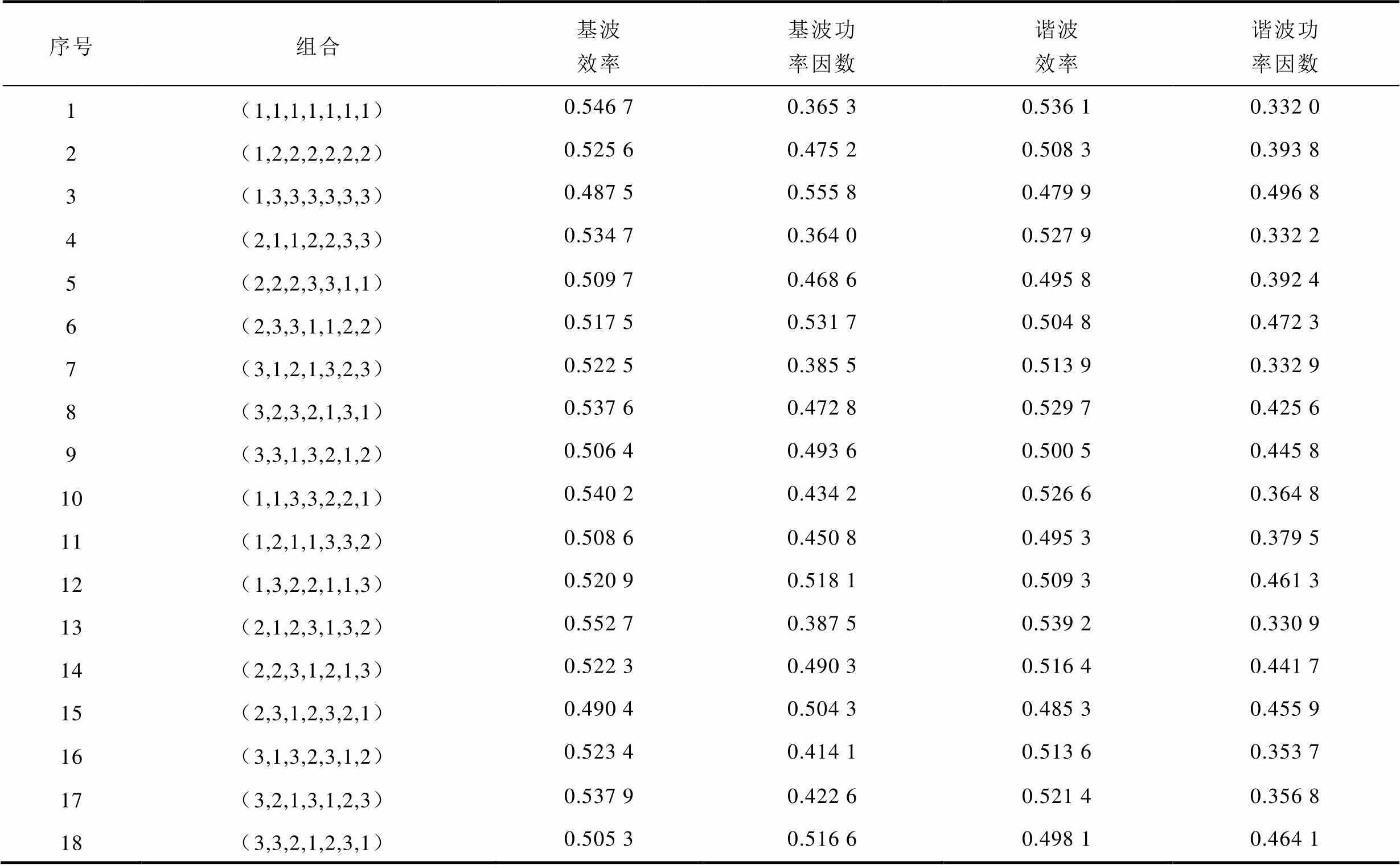
序号组合基波效率基波功率因数谐波效率谐波功率因数 1(1,1,1,1,1,1,1)0.546 7 0.365 3 0.536 1 0.332 0 2(1,2,2,2,2,2,2)0.525 6 0.475 2 0.508 3 0.393 8 3(1,3,3,3,3,3,3)0.487 5 0.555 8 0.479 9 0.496 8 4(2,1,1,2,2,3,3)0.534 7 0.364 0 0.527 9 0.332 2 5(2,2,2,3,3,1,1)0.509 7 0.468 6 0.495 8 0.392 4 6(2,3,3,1,1,2,2)0.517 5 0.531 7 0.504 8 0.472 3 7(3,1,2,1,3,2,3)0.522 5 0.385 5 0.513 9 0.332 9 8(3,2,3,2,1,3,1)0.537 6 0.472 8 0.529 7 0.425 6 9(3,3,1,3,2,1,2)0.506 4 0.493 6 0.500 5 0.445 8 10(1,1,3,3,2,2,1)0.540 2 0.434 2 0.526 6 0.364 8 11(1,2,1,1,3,3,2)0.508 6 0.450 80.495 3 0.379 5 12(1,3,2,2,1,1,3)0.520 9 0.518 1 0.509 3 0.461 3 13(2,1,2,3,1,3,2)0.552 7 0.387 5 0.539 2 0.330 9 14(2,2,3,1,2,1,3)0.522 3 0.490 3 0.516 4 0.441 7 15(2,3,1,2,3,2,1)0.490 4 0.504 3 0.485 3 0.455 9 16(3,1,3,2,3,1,2)0.523 4 0.414 1 0.513 6 0.353 7 17(3,2,1,3,1,2,3)0.537 9 0.422 6 0.521 4 0.356 8 18(3,3,2,1,2,3,1)0.505 3 0.516 6 0.498 1 0.464 1
在确定了优化变量和优化目标后,本文通过相关分析,可以确定每个优化变量对不同优化目标的影响。采用传统的单参数扫描法来进行敏感性分析时,其优化时间会随优化变量或目标数量增加而急剧增长,同时还受初始方案的影响。为克服上述缺点,本文引入Pearson相关系数r来衡量优化变量对优化目标的影响,其表达式为
 (33)
(33)
式中, 和SX为变量X的样本平均值和标准差;
和SX为变量X的样本平均值和标准差; 和SY为变量Y的样本平均值和标准差;n为样本数量。
和SY为变量Y的样本平均值和标准差;n为样本数量。
图3为基于表2的样本点和式(33)得到的电机结构参数与性能指标间的Pearson相关系数。由图3可以看出,相关系数的变化范围为[-1, 1],其绝对值越大,表明两者关联性越大:正值为正相关,负值为负相关。进一步分析,可以得出以下两点结论:①初级槽宽和齿宽对LIM的铜损电阻和铁损电阻影响较大,进而明显影响LIM驱动性能;②次级背铁厚度对电机性能的影响较小:因为次级电阻为次级导板电阻和次级背铁电阻并联而成,而后者相比前者值较小,所以背铁厚度的变化对次级电阻的影响较小。
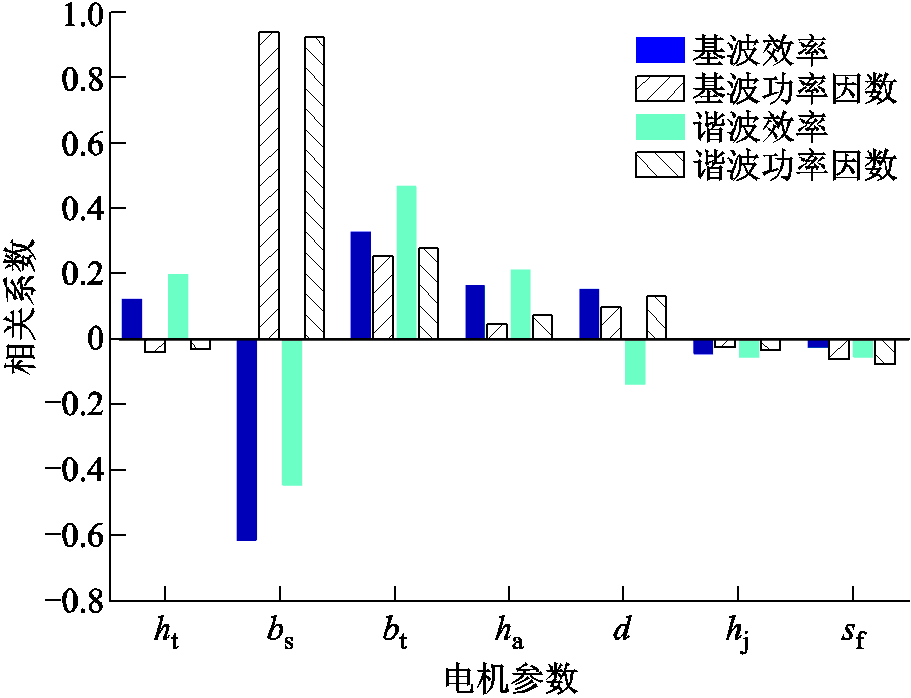
图3 电机结构参数与性能指标间的相关系数
Fig.3 Correlation coefficients between motor structure parameters and performance indexes
前面的相关分析能够评估每个参数对不同目标函数是否有影响,并且还能用相关系数来衡量具体影响程度的大小。不足的是,相关分析无法考虑不同变量之间的交互作用:即变量A相关系数较大,而变量B相关系数较小,但A和B合为一个整体后对目标函数的影响又较大;针对此类情况,在进行分层分析时,必须将A和B变量分到同一层进行深入研究。
为考虑变量之间的交互作用,需要进行方差分析。首先基于表2的样本点,得到衡量样本间显著性差异的水平样本的F值,具体计算式为
 (34)
(34)
 (35)
(35)
 (36)
(36)
式中,MSb为组间方差;MSw为组内方差;k为变量数;n为含有某个变量的数据个数;Z为目标函数值。
进一步,将得到的结果与F值表的临界值进行对比:若计算得到的F值大于F临界值,则表明组间差异显著,也即相应的交叉因子对目标函数的影响较大。表3为基于方差分析,筛选出的对优化目标影响较大的交叉因子。由表3得知,本文没有同时含有初、次级参数的影响较大的交叉因子,即后续优化时,可将初、次级参数放在不同层进行优化。同时可以看出,虽然LIM初级槽高的相关系数较小,但其与初级槽宽和初级齿宽的交叉因子的交互作用较强,为此必须将初级槽高与后两个参数放在同一层来进行优化。
表3 对优化目标影响较大的交叉因子
Tab.3 Cross-factors with significant influence on optimization objectives

优化目标基波效率基波功率因数谐波效率谐波功率因数 交叉因子
采用Pearson相关系数和方差对优化变量进行参数敏感性分析后,本文将优化变量分为三层:影响较大的初级参数(包括ht、bs和bt)、影响较大的次级参数(包括d和sf)、其他参数(包括ha和hj)。图4给出了LIM的多层次优化流程。
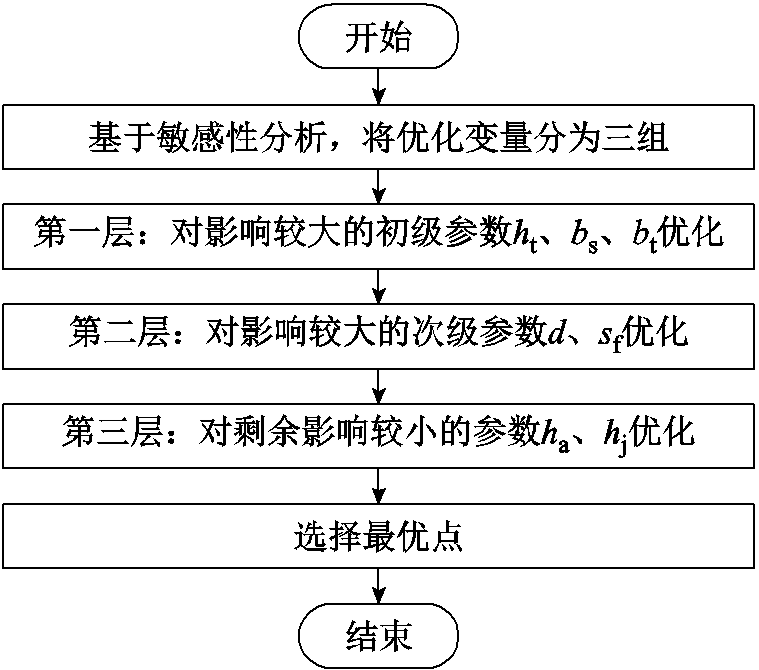
图4 LIM多层次优化流程
Fig.4 Multi-level optimization flow chart for LIM
LIM的优化目标函数为
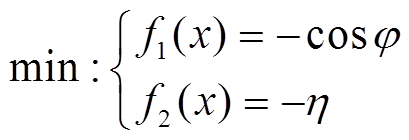 (37)
(37)
考虑到一般优化算法都是求最小值,而本文的优化目标是使功率因数和效率最大,所以建立目标函数时需要在这两个变量前添加负号(后文图中所示值的大小有意义,负号无特殊含义)。
优化过程中,气隙长度为固定值10mm,同时电机额定功率、额定推力、额定速度、初级宽度、次级宽度和绕组参数也保持恒定不变,具体取值见表4。
表4 优化过程中恒定参数
Tab.4 Constant parameters in the process of optimization
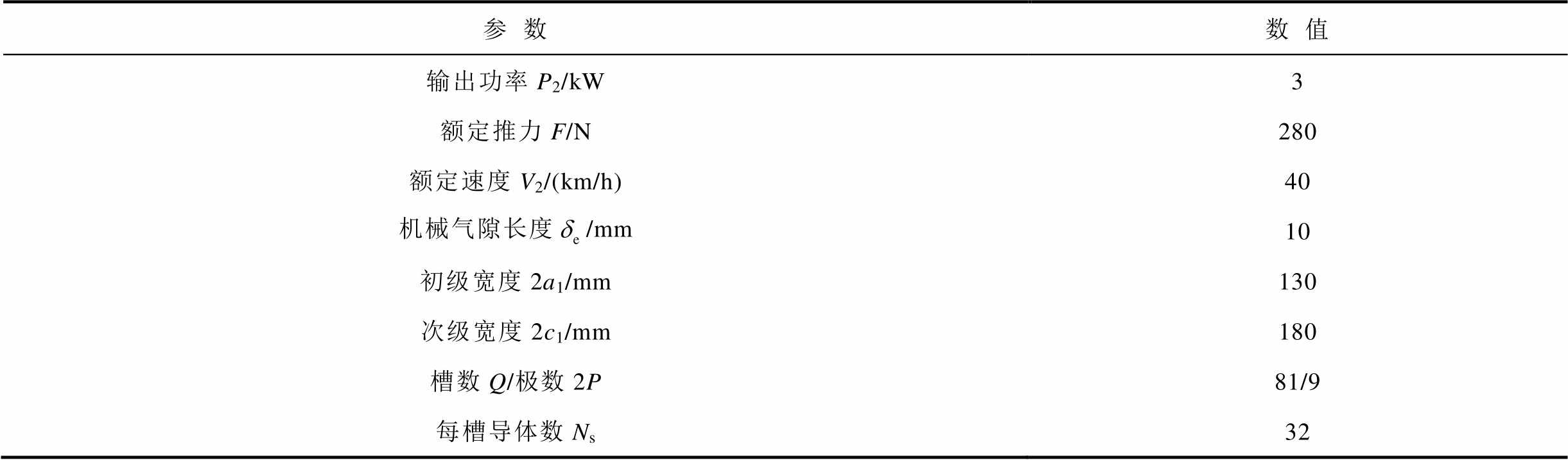
参数数值 输出功率P2/kW3 额定推力F/N280 额定速度V2/(km/h)40 机械气隙长度/mm10 初级宽度2a1/mm130 次级宽度2c1/mm180 槽数Q/极数2P81/9 每槽导体数Ns32
考虑轨道交通实际工程经验,并经过初始电磁分析,在表1中给出了各优化变量的取值范围,和如下的不等式约束条件为
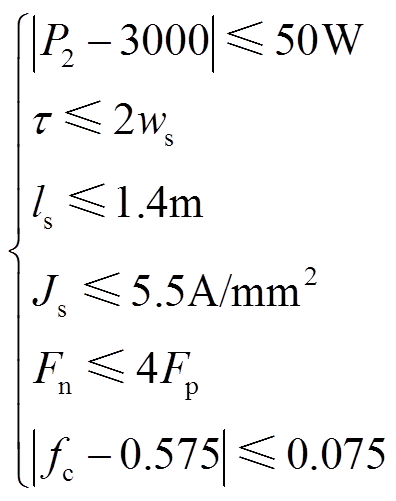 (38)
(38)
式中,P2为电机输出功率(W); 为初级宽度(m);ls为初级长度(m);Js为初级电枢绕组电流密度(A/mm2);Fn为法向力;Fp为电磁推力;fc为槽满率。
为初级宽度(m);ls为初级长度(m);Js为初级电枢绕组电流密度(A/mm2);Fn为法向力;Fp为电磁推力;fc为槽满率。
LIM多层次优化步骤具体总结如下:
(1)首先,当第一层优化完成后,从得到的Parato前沿选取三个有一定间隔的点作为下一层多目标优化的初始点。
(2)其次,对三个点采用和第一层同样的优化方法,得到三个Parato前沿,并从每个Parato前沿选取一个点作为下一层优化的初始点。
(3)然后,第三层优化采用和第二层优化相同的优化步骤,得到三个点。
(4)最后,基于优化目标综合考虑,从第三层得到的三个点选出最终的优化方案。
在多目标优化问题中,因各目标间通常是相互制约的,即一个目标性能改善往往是以牺牲其他目标性能为代价,很难找到能保证所有目标性能都能达到最优的完美解;因此,通常所言的最优解,其实是对多个目标的折中,可采用Parato解集来表示。
多目标问题有几种常用的优化算法,比如多目标粒子群算法、多目标进化算法、非支配排序遗传算法(Nondominated Sorting Genetic Algorithm, NSGA)及其改进版NSGAⅡ。其中,NSGAⅡ是一种快速非支配的排序算法,可明显降低NSGA算法的复杂度,并引入了精英策略和拥挤度比较算子,能确保非劣最优解的均匀分布,因而优化效果很好,近年来得到了广泛应用[26]。为此,本文选取NSGAⅡ算法,对后续的LIM多目标优化问题进行求解。
图5为第一层优化后的结果,可以看出初始方案的效率和功率因数分别为0.509 2和0.388 7,同时Parato曲线的中段存在的两者数值都优于初始值的点集:效率为0.509 8~0.535 5,功率因数为0.390 5~0.446 9。为让选取点相比初始点有一定优势,并能较好地代表Parato解集,本文根据功率因数大小,将较优的解集范围划为三个区间(分别为0.39~0.41, 0.41~0.43,0.43~0.45),同时选取的三个点保持一定距离,从而能覆盖较宽范围。第一层优化后选取的三个代表点见表5,它们将被作为第二层优化的初始点。
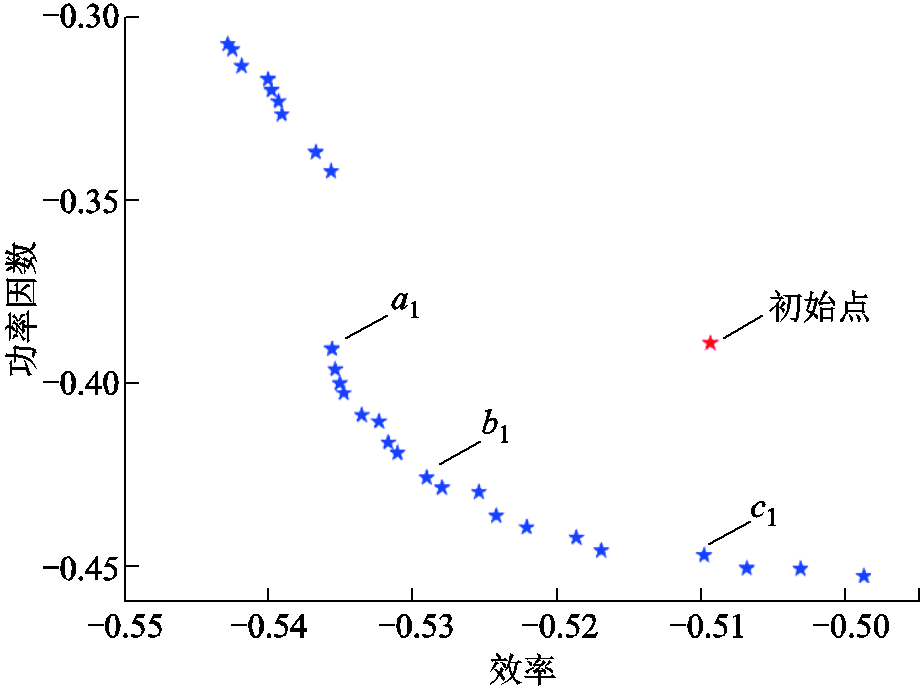
图5 第一层优化后的Parato前沿
Fig.5 Pareto solutions after Level 1 optimization
表5 第一层优化结果
Tab.5 Optimization results in Level 1

参数优化值 点a1点b1点c1 Level 1优化变量ht/mm44.031.425.6 bs/mm8.39.012.5 bt/mm8.68.55 优化目标h0.535 50.529 00.509 8 cosj0.390 50.425 70.446 9
图6为第二层优化后的结果,其中图6a~图6c分别为每个点的Parato解集。由图6可以看出,LIM的功效最优值可从第一层0.229 3提高达到0.236 9,即通过第二层优化后,LIM的功效水平获得了进一步的提升。采用类似方法,本文分别从三个Parato前沿上各选一个性能较优的点作为第三层优化的初始点,具体值见表6。
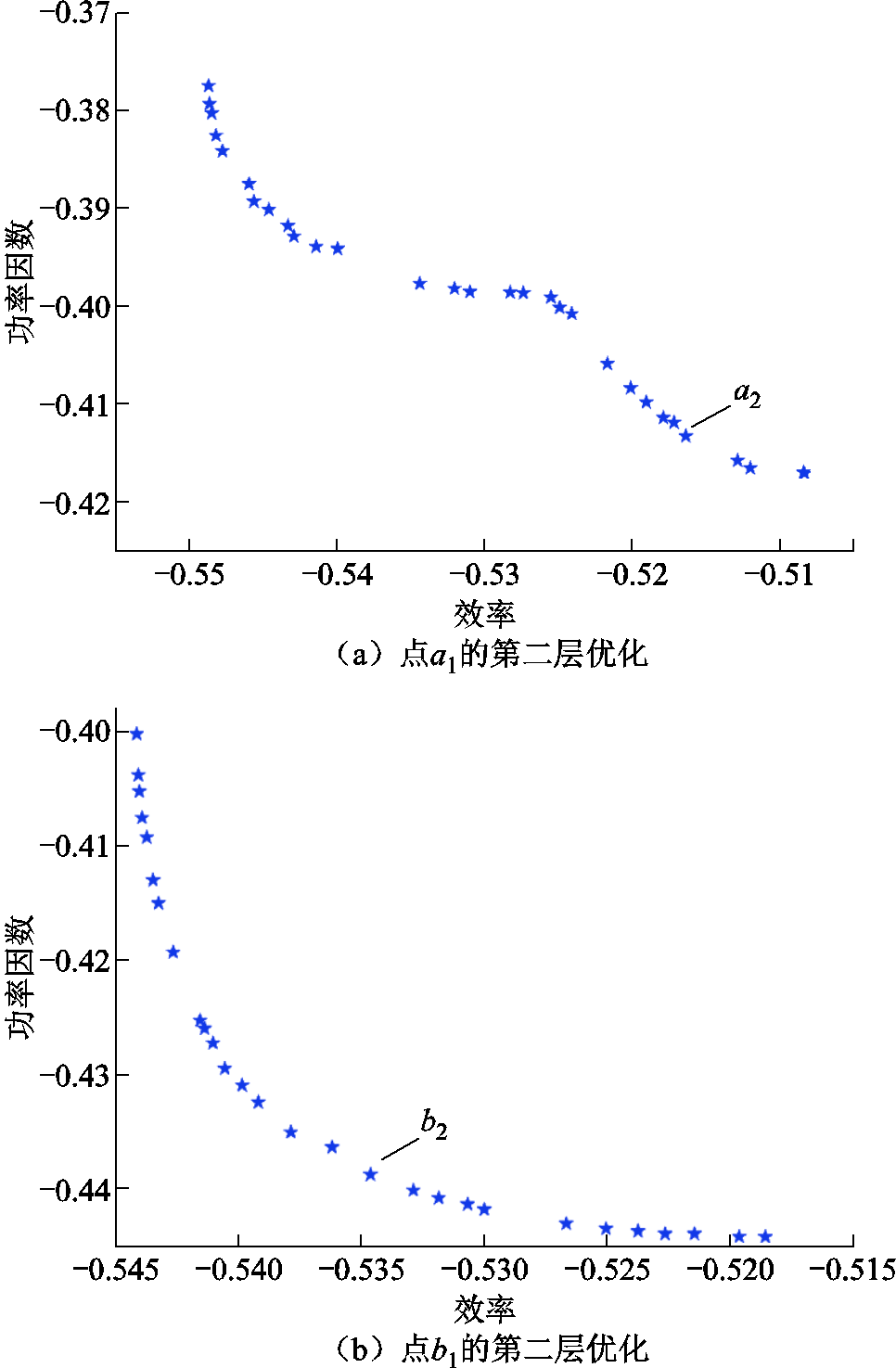
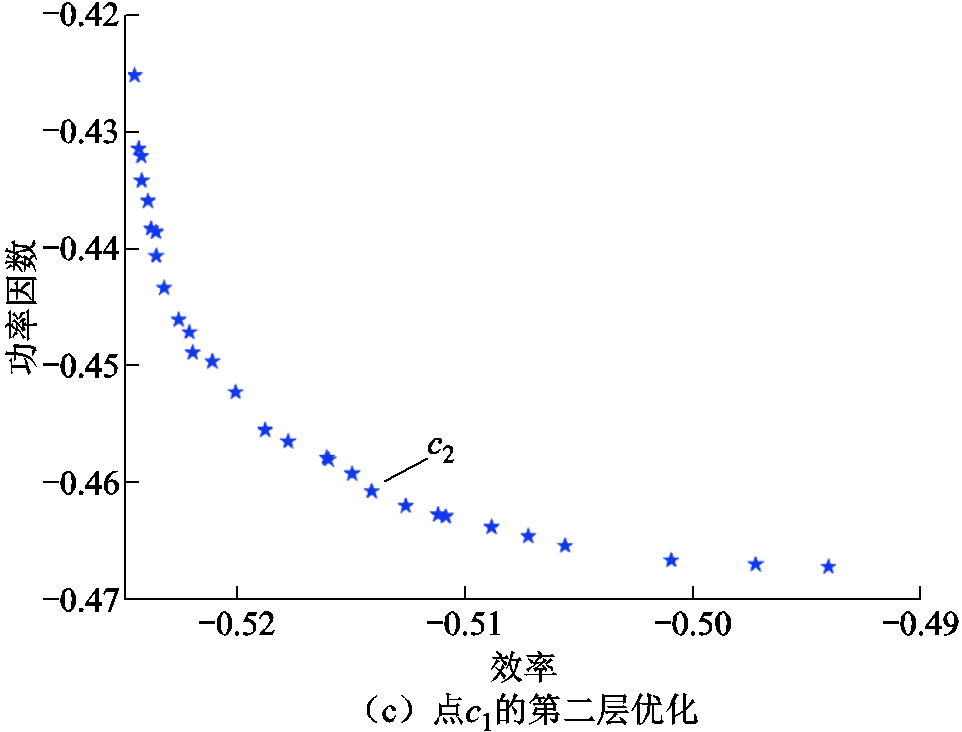
图6 第二层优化后的帕累托前沿
Fig.6 Pareto solutions after Level 2 optimization
表6 第二层优化结果
Tab.6 Optimization results in Level 2

参数点a2点b2点c2 Level 1优化变量和表4相同 Level 2优化变量d/mm3.44.14.3 sf14.9410.8710.86 优化目标h0.518 60.534 70.514 2 cosj0.409 40.438 60.460 6
图7为第三层优化后的结果,可以看到,参数对目标函数的影响很小,这也符合之前参数敏感性分析的结果。但是随着初级轭厚ha和次级轭厚hj的增加,电机轭部磁通密度降低,铁耗减小,导致电机的效率和功率因数同时单调增加,即在没有其他条件的约束下,轭部越厚,LIM性能越好。因此,在这一层优化时,本文选取LIM的质量M作为优化目标,从而约束变量ha和hj的取值大小;优化目标变为在LIM质量变化不大的前提下,希望能取得较大的效率和功率因数。考虑到通过三维Parato前沿去评估最优点不直观,本文引入功效来同时评估效率和功率因数,得到的二维Parato前沿分布情况如图8所示。由图8可知,因为LIM效率和功率因数的变化较小,导致其功效的变化也较小。此外,三个点变化趋势基本相同,随着LIM质量的增加,其功效的增加逐渐变缓,即LIM质量提升到一定程度后,优化方案对电机性能的提升效果将会变得较小。此时,本文选取变化趋势开始变缓的三个点作为第三层的优化结果,具体见表7。可以看出,三个点的质量都与初始方案接近,并且功效都优于初始方案:点b3和c3的方案要优于a3,其中b3的效率比c3的高0.038,但功率因数低0.05。综合考虑,本文选择b3点作为最终的优化方案。
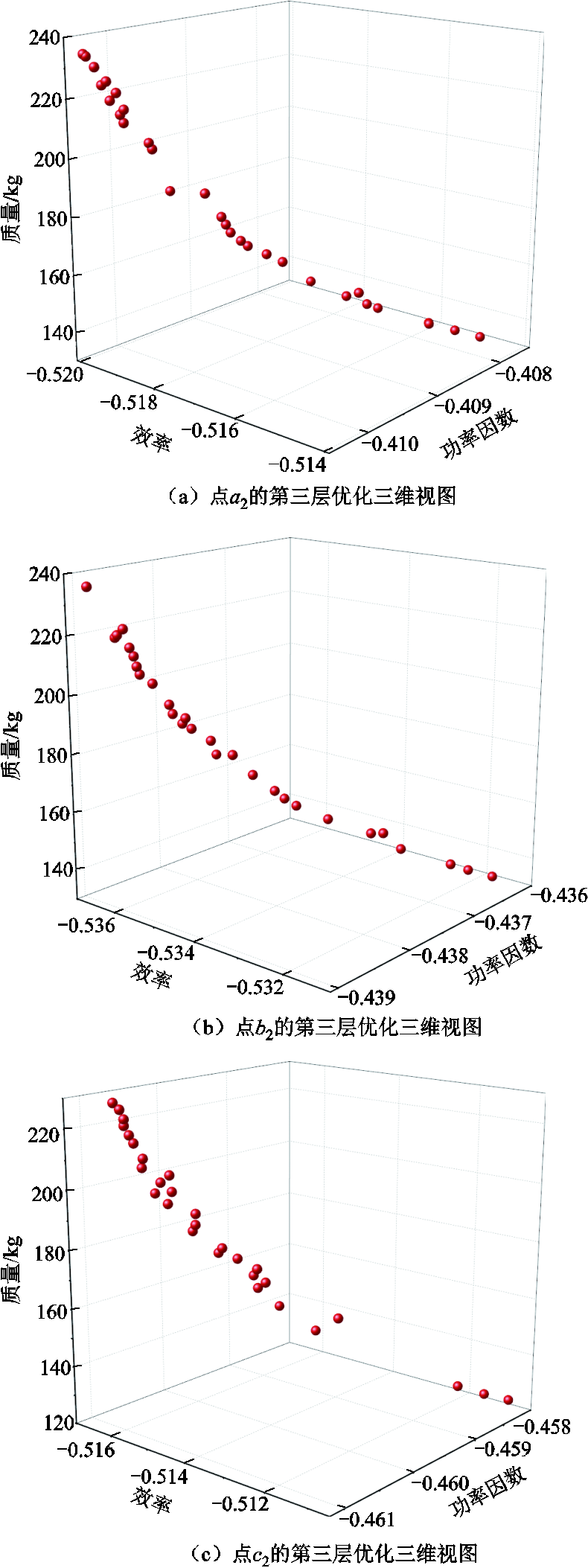
图7 第三层优化后的帕累托前沿三维视图
Fig.7 Pareto 3D solutions after Level 3 optimization
直线感应电机优化前后主要尺寸见表8,可以看出,优化后,增加齿高,降低了初次级轭部厚度,使磁通密度的分布更加均匀,从而最大程度地利用了铁心材料,提高了电机的功率因数;此外,由于齿槽尺寸的调制,电负荷磁的配比更加均匀,从而提高了电机的功率因数。
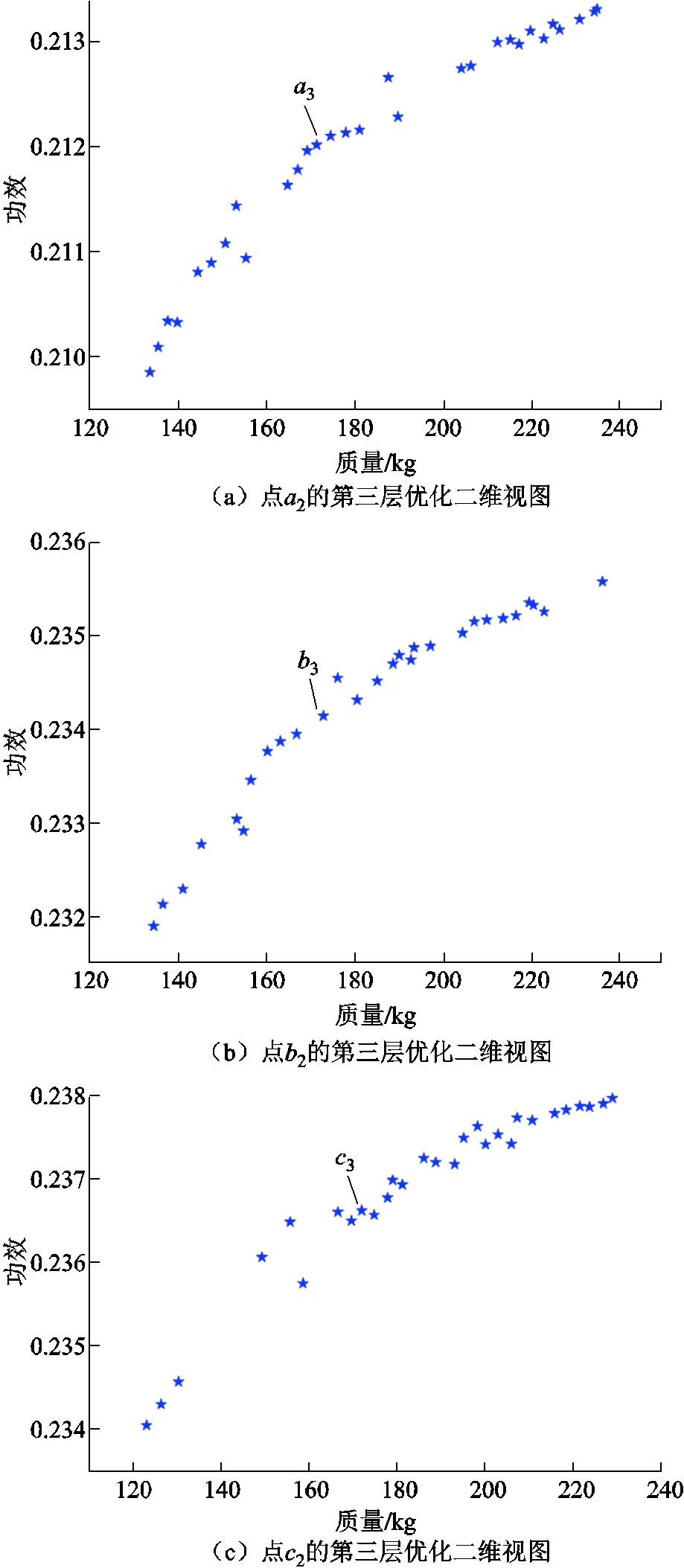
图8 第三层优化后的帕累托前沿二维视图
Fig.8 Pareto 2D solutions after Level 3 optimization
表7 第三层优化结果
Tab.7 Optimization results in Level 3
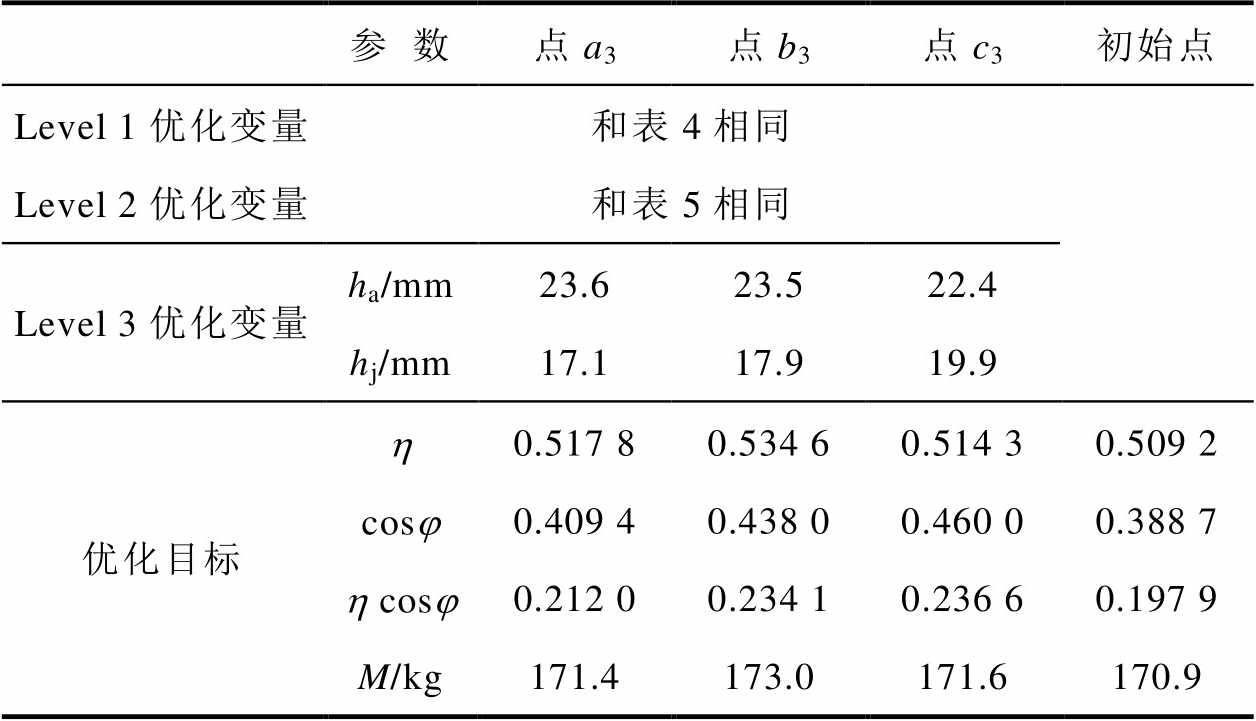
参数点a3点b3点c3初始点 Level 1优化变量和表4相同 Level 2优化变量和表5相同 Level 3优化变量ha/mm23.623.522.4 hj/mm17.117.919.9 优化目标h0.517 80.534 60.514 30.509 2 cosj0.409 40.438 00.460 00.388 7 h cosj0.212 00.234 10.236 60.197 9 M/kg171.4173.0171.6170.9
表8 优化前后主要尺寸
Tab.8 Main parameters before and after optimizition
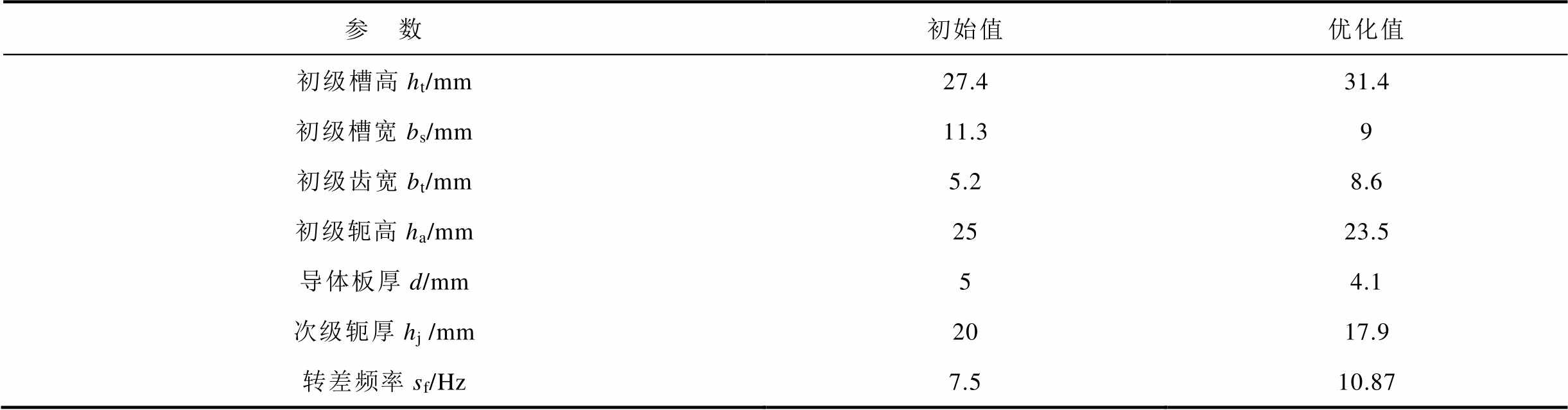
参 数初始值优化值 初级槽高ht/mm27.431.4 初级槽宽bs/mm11.39 初级齿宽bt/mm5.28.6 初级轭高ha/mm2523.5 导体板厚d/mm54.1 次级轭厚hj /mm2017.9 转差频率sf/Hz7.510.87
图9为在Ansoft Maxwell软件里搭建的LIM有限元分析模型。有限元模型采用外电路供电,该外电路为三相两电平电压型逆变器;和实际情况相同,该逆变器经过调制输出PWM波,含有丰富的谐波成分。该模型和解析模型采用相同的结构参数,并保持相同的出力、次级速度和初级频率。

图9 直线感应电机有限元模型
Fig.9 FEA model of LIM
图10为分别采用解析法和有限元法得到的LIM性能曲线,电机整个运行过程中的性能参数误差见表9。由图10和表9可以看出,LIM的推力、效率和内功率因数(反电动势和电流夹角的余弦)的平均误差小于6%,特别是额定点的误差小于1%,说明建立的解析模型可以满足工程应用需求。进一步,对高速和低速工况进行分析:
(1)高速运行时,通过有限元模型计算的LIM反电动势比解析模型略大;在输出功率一定时,采用有限元计算的电流偏低。相关原因是本文的二维有限元模型没有考虑横向端部效应对气隙磁场的削弱作用。
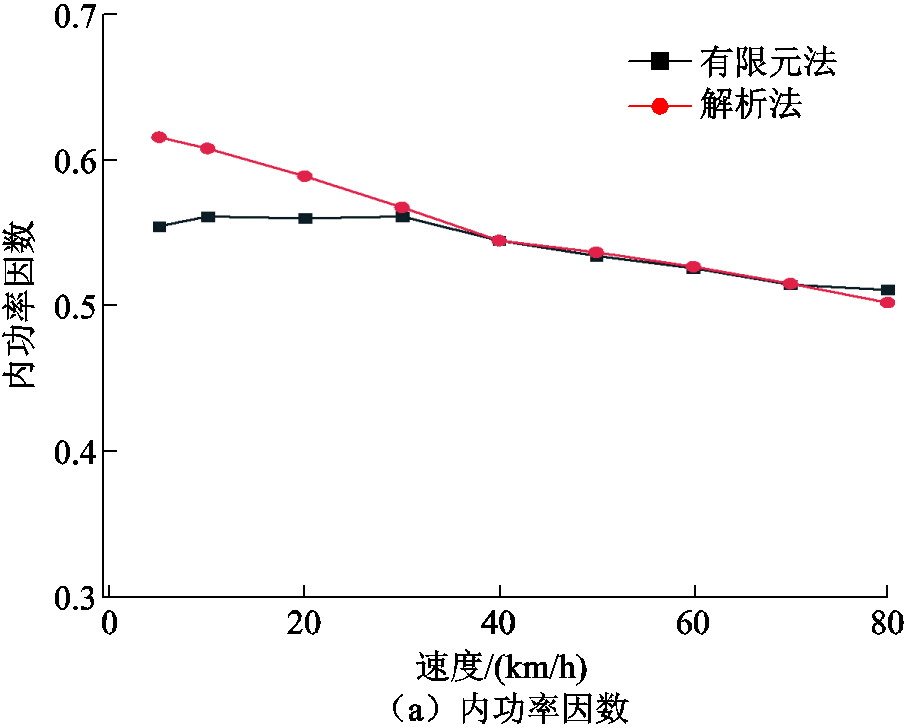

图10 直线感应电机性能指标曲线
Fig.10 Performance indexes of the LIM
(2)低速运行时,解析法得到的电流比有限元仿真结果偏小;在有功功率不变的情况下,其内功率因数和效率比有限元仿真结果要大。相关原因是LIM有限元模型中增加了槽靴,电机的初级漏抗增加,在同样大小气隙磁场的前提下需要的励磁电流增加。
表9 性能参数误差
Tab.9 Error analysis of performance indexes

误差(%) 最大平均额定点 相电流1361 内功率因数1030 反电动势1131 效率1361
为模拟直线轨道交通用LIM驱动性能,本文研制了3kW弧型感应电机,如图11所示:直径1.25 m的转子作为次级运行,可被近似看做直线运动;开断的弧形定子可以合理模拟LIM特有的半填充槽和边端效应。该弧型感应电机(Arc Induction Motor, AIM)充分保留了LIM的特点,因此可认为两者等效。由图11可知,LIM模拟测试平台由电压源逆变器供电,负载永磁同步电机通过齿轮箱连接弧形感应电机的机械轴。模拟平台的输入功率由功率分析仪测量,输出功率由转矩传感器获得。
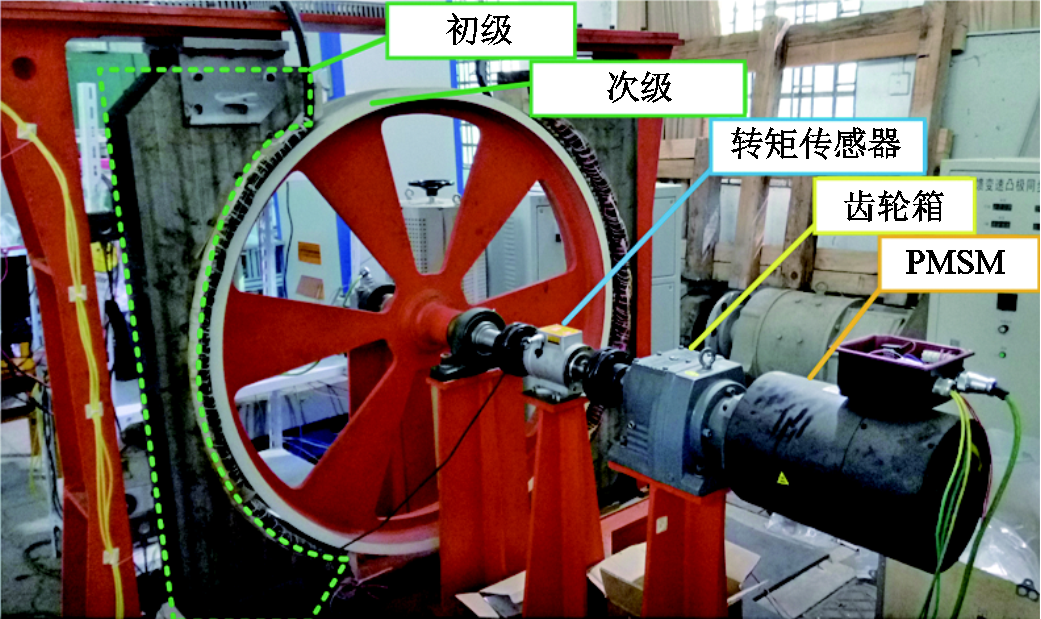
图11 LIM模拟平台
Fig.11 LIM demonstration platform
图12为电机在相同工况下,不同开关频率下的实测相电流波形。可以看出,随着开关频率的降低,电流波形的毛刺和不对称性增加,谐波含量增多。

图12 不同开关频率下的相电流波形
Fig.12 Measured phase current under different switching frequency
图13和图14分别为恒流恒频和恒压恒频工况下的LIM推力曲线,其中虚线为解析法结果,实线为实验测量结果。通过两幅图看出,解析法和实验测量结果基本吻合。当电源频率从20Hz增加到50Hz时,因为LIM的边端效应增加,LIM的最大推力逐步被削弱。
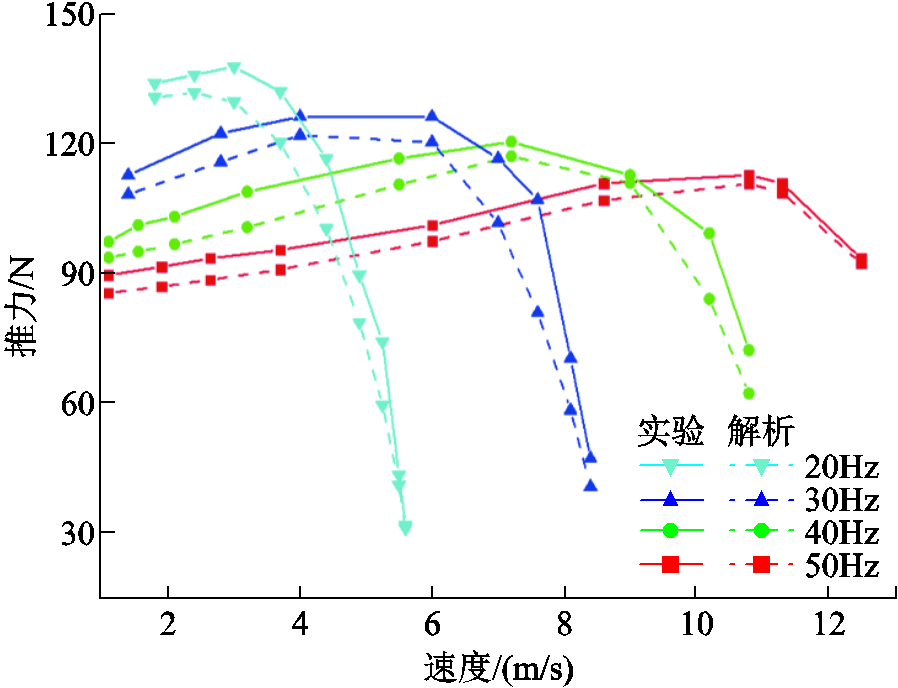
图13 恒流恒频下计算和测量推力
Fig.13 Calcultaed and measured force under constant current costant frequency
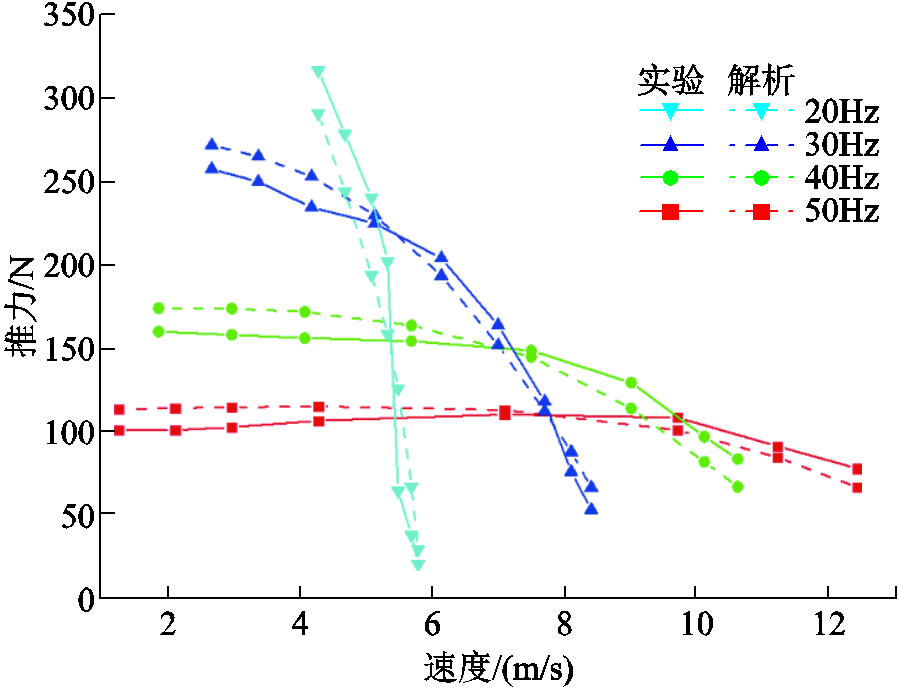
图14 恒压恒频下计算和测量推力
Fig.14 Calcultaed and measured force under constant voltage costant frequency
不同开关频率时,基于不考虑谐波影响的解析法计算得到的损耗与实验测量的损耗随负载变化的曲线如图15所示。从图15中可以看出,随着开关频率的降低,调制比减小,谐波对LIM性能的影响增大,导致解析计算与实验测量的误差逐渐增大。当开关频率从2.5kHz降低到500Hz时,平均误差从2%增加到16%。因此,当开关频率较低时,不考虑谐波影响的解析法难以满足要求。
图15c给出开关频率为500Hz,考虑谐波和不考虑谐波影响的解析法与实验测量的损耗。考虑谐波影响后,计算损耗的平均误差由16%减小到5%。这表明,采用本文提出的谐波模型能更准确地分析LIM的性能。误差的主要原因在于,为简化分析过程,本文计算逆变器谐波损耗时只考虑了主要谐波成分,而忽略了其他阶次的影响。整体而言,相关实验结果和仿真分析基本吻合,验证了本文谐波等效电路的合理性,也证明了多目标优化方案的可靠性。
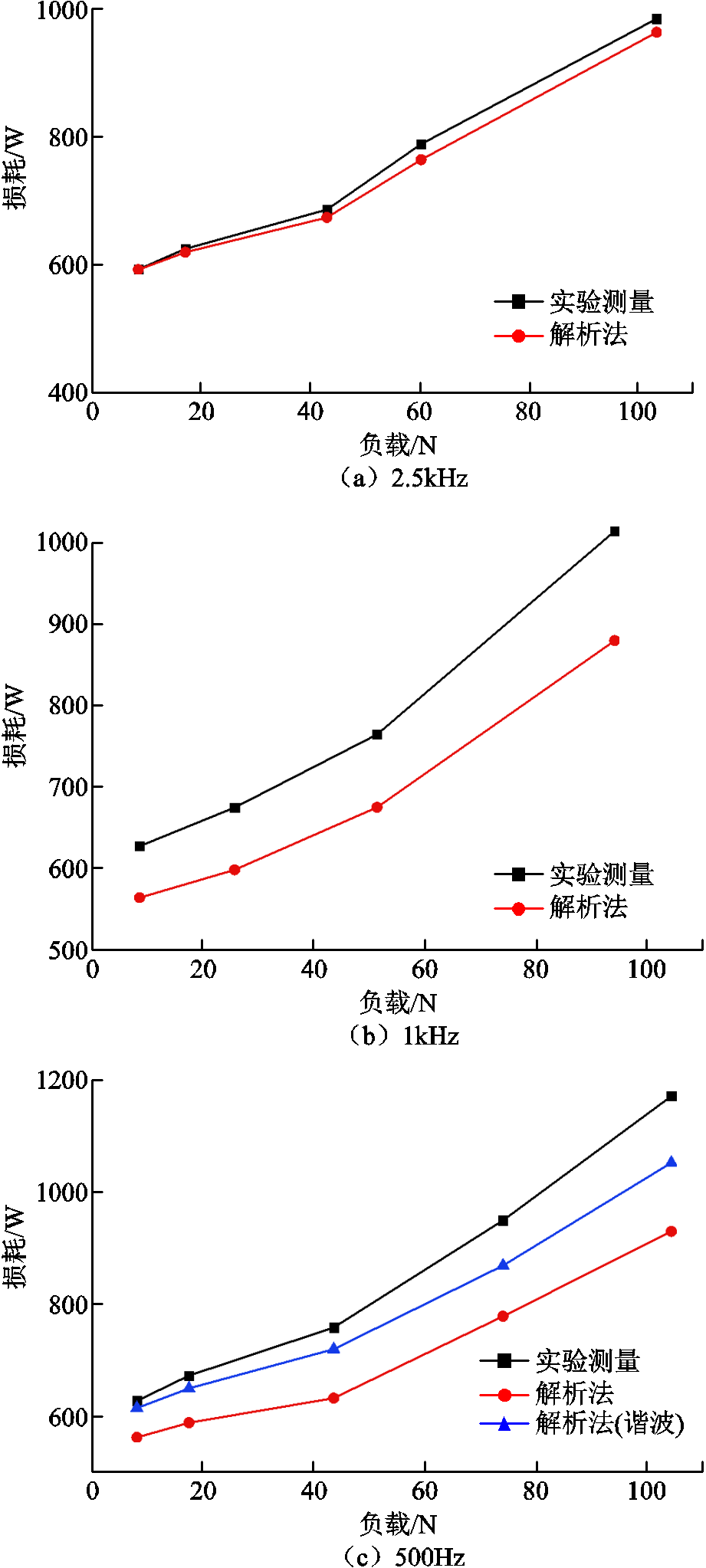
图15 不同开关频率下的计算损耗和实验测量损耗
Fig.15 Calculated losses and measured losses with different switching frequencies
本文提出了一种考虑逆变器谐波影响的LIM多层次多目标优化方法。论文通过推导求得LIM谐波等效电路,并根据轨道交通应用需求建立多目标优化函数,引入相关系数和方差对LIM参数敏感性进行深入分析,并将单层优化问题转换为多层优化问题。优化过程及结果表明:相对原始方案,优化后的LIM在质量不变的前提下,效率提升约5.0%,功率因数提升约12.7%。相关仿真分析和实验测试与对应的解析分析结果基本一致,充分说明了谐波模型的准确性和优化方案的可靠性。
参考文献
[1] 龙遐令. 直线感应电动机的理论和电磁设计方法[M]. 北京: 科学出版社, 2006.
[2] Boldea I. Linear electric machines, drives, and MAGLEVs handbook[M]. Boca Raton: CRC Press, 2013.
[3] Xu Wei, Islam R, Pucci M. Advanced linear machines and drive systems [M]. Berlin: Springer Verlag, 2019.
[4] Xu Wei, Zhu Jianguo, Zhang Yongchang, et al. Equivalent circuits for single-sided linear induction motors[J]. IEEE Transactions on Industry Applications, 2010, 46(6): 2410-2423.
[5] Boldea I, Xu Wei, Pucci M. Linear electric machines, drives and MAGLEVs: an overview[J]. IEEE Transa-ctions on Industrial Electronics, 2018, 65(9): 7504-7515.
[6] 徐伟, 肖新宇, 董定昊, 等. 直线感应电机效率优化控制技术综述[J]. 电工技术学报, 2021, 36(5): 902-915, 934.
Xu Wei, Xiao Xinyu, Dong Dinghao, et al. Review on efficiency optimization control strategies of linear induction machines[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 902-915, 934.
[7] Isfahani A, Ebrahimi B, Lesani H. Design optimization of a low-speed single-sided linear induction motor for improved efficiency and power factor[J]. IEEE Transactions on Magnetics, 2008, 44(2): 266-272.
[8] Shiri A, Shoulaie A. Design optimization and analysis of single-sided linear induction motor, considering all phenomena[J]. IEEE Transactions on Energy Conversion, 2012, 27(2): 516-525.
[9] Ravanji M, Nasiri-Gheidari Z. Design optimization of a ladder secondary single-sided linear induction motor for improved performance[J]. IEEE Transactions on Energy Conversion, 2015, 30(4): 1595-1603.
[10] Lu Qinfen, Li Longxiang, Zhan Jiawen, et al. Design optimization and performance investigation of novel linear induction motors with two kinds of secondaries[J]. IEEE Transactions on Industry Applications, 2019, 55(6): 5830-5842.
[11] 罗俊, 寇宝泉, 杨小宝. 双交替极横向磁通直线电机的优化与设计[J]. 电工技术学报, 2020, 35(5): 991-1000.
Luo Jun, Kou Baoquan, Yang Xiaobao. Optimization and design of dual-consequent-pole transverse flux linear machine[J]. Transactions of China Electrote-chnical Society, 2020, 35(5): 991-1000.
[12] Ullah W, Khan F, Umair M. Multi-objective optimization of high torque density segmented PM consequent pole flux switching machine with flux bridge[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 30-40.
[13] Xu Wei, Hu Dong, Lei Gang, et al. System-level efficiency optimization of a linear induction motor drive system[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(3): 285-291.
[14] Xu Wei, Xiao Xinyu, Du Guanghui, et al. Comprehensive efficiency optimization of linear induction motors for urban transit[J]. IEEE Transactions on Vehicular Technology, 2020, 69(1): 131-139.
[15] Lee B, Kim K, Hong J, et al. Optimum shape design of single-sided linear induction motors using response surface methodology and finite-element method[J]. IEEE Transactions on Magnetics, 2011, 47(10): 3657-3660.
[16] Zhang Shuangshuang, Zhang Wei, Wang Rui, et al. Optimization design of halbach permanent magnet motor based on multi-objective sensitivity[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(1): 20-26.
[17] 李祥林, 李金阳, 杨光勇, 等. 电励磁双定子场调制电机的多目标优化设计分析[J]. 电工技术学报, 2020, 35(5): 972-982.
Li Xianglin, Li Jinyang, Yang Guangyong, et al. Multi-objective optimization analysis of electric-excitation double-stator field-modulated machine[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 972-982.
[18] 李雄松, 崔鹤松, 胡纯福, 等. 平板型永磁直线同步电机推力特性的优化设计[J]. 电工技术学报, 2021, 36(5): 916-923.
Li Xiongsong, Cui Hesong, Hu Chunfu, et al. Optimal design of thrust characteristics of flat-type permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 916-923.
[19] 赵玫, 于帅, 邹海林, 等. 聚磁式横向磁通永磁直线电机的多目标优化[J]. 电工技术学报, 2021, 36(17): 3730-3740.
Zhao Mei, Yu Shuai, Zou Hailin, et al. Multi-objective optimization of transverse flux permanent magnet linear machine with the concentrated flux mover[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3730-3740.
[20] 孔令星, 肖嵩, 郭小舟. 基于Kriging代理模型的直线感应电机多目标优化设计[J]. 微电机, 2018, 51(7): 12-15.
Kong Lingxing, Xiao Song, Guo Xiaozhou. Multiobjective optimum design of linear induction motor using kriging surrogate model[J]. Micromotors, 2018, 51(7): 12-15.
[21] 宫金林, 王秀和. 基于多目标有效全局优化算法的直线感应电动机优化设计[J]. 电工技术学报, 2015, 30(24): 32-37.
Gong Jinglin, Wang Xiuhe. Optimal design of a linear induction motor using multi-objective efficient global optimization[J]. Transactions of China Electrotechnical Society, 2015, 30(24): 32-37.
[22] 刘国海, 王艳阳, 陈前. 非对称V型内置式永磁同步电机的多目标优化设计[J]. 电工技术学报, 2018, 33(增刊2): 385-393.
Liu Guohai, Wang Yanyang, Chen Qian. Multi-objective optimization of an asymmetric V-shaped interior permanent magnet synchronous motor[J]. Transactions of the China Electrotechnical Society, 2018, 33(S2): 385-393.
[23] Zhu Xiaoyong, Xiang Zixuan, Quan Li, et al. Multimode optimization design methodology for a flux-controllable stator permanent magnet memory motor considering driving cycles[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5353-5366.
[24] Sun Xiaodong, Shi Zhou, Lei Gang, et al. Multi-objective design optimization of an IPMSM based on multilevel strategy[J]. IEEE Transactions on Industrial Electronics, 2021, 68(1): 139-148.
[25] Gieras J. Linear induction drives[M]. Oxford: Clarendon Press, 1994.
[26] Deb K, Pratap A, Agarwal S, et al. A fast and elitist multiobjective genetic algorithm: NSGA-Ⅱ[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197.
Multi-Level Multi-Objective Optimization Algorithm for Linear Induction Motor Applied to Urban Transit Considering Converter Hamonics
Abstract Due to the inherent large air gap, end effect and inverter harmonics,the linear induction motor (LIM) applied in rail transit has great difficulty to obtain high efficiency and power factor. In order to overcome related problems, a multi-level and multi-objective optimization method considering the influence of inverter harmonics is proposed in this paper. First of all, based on the traditional fundamental equivalent circuit, the harmonic analysis model of the LIM considering the influence of converter is established, and the analytical expression of the optimization objective is obtained. Then, through the sensitivity analysis of the motor parameters, seven main parameters are identified and used as subsequent optimization variables for the LIM drive. Furthermore, in order to reduce the optimization time and improve the optimization effect, the primary and secondary variables that affect the motor performance are found through Pearson coefficient correlation analysis and variance analysis, so that the single-level optimization problem is transformed into a multi-level optimization problem. Comprehensive simulation and experimental results have shown that the LIM based on the proposed optimization method in this paper can improve the efficiency and power factor by about 5.0% and 12.7%, respectively.
keywords:Linear induction motor (LIM), harmonics equivalent, multi-level optimization, multi-objective optimization, urban transit
DOI:10.19595/j.cnki.1000-6753.tces.211407
中图分类号:TM359.4
国家自然科学基金(51877093)、国家重点研发计划金砖国际合作重点项目(2018YFE0100200)和湖北省重大科技创新项目(2019AAA026)资助。
收稿日期 2021-09-05
改稿日期 2021-10-14
徐 伟 男,1980年生,教授,博士生导师,研究方向为直线电机设计及控制。E-mail:weixu@hust.edu.com(通信作者)
肖新宇 男,1994年生,博士,研究方向为直线电机设计及控制。E-mail:xinyuxiao@hust.edu.cn
(编辑 郭丽军)