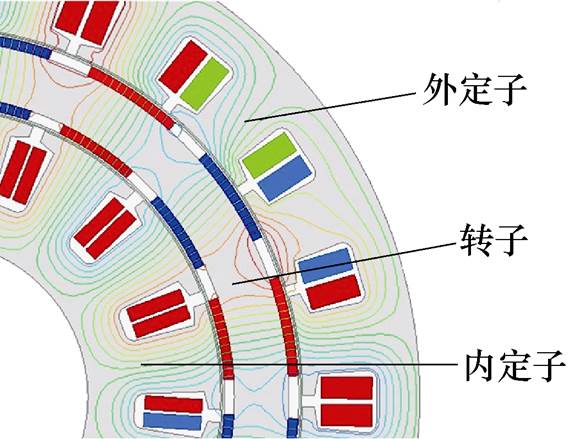
图1 电机磁力线分布
Fig.1 Distribution of the flux lines of the motor
摘要 针对双定子低速大转矩永磁同步电动机的转矩脉动问题,该文基于相位分析研究了内外定子槽数配合以及内外定子相对位置对双定子永磁同步电动机转矩脉动的影响。利用叠加原理,将整个电机分为两个部分,即内、外两个电机分开研究转矩脉动。在内外定子槽数不同的情况下,通过分析反电动势,发现谐波的绕组系数正负性会对内外电机反电动势的相位产生影响,基于此,对内外电机反电动势相位进行了预测,并进一步预测内外电机各自的纹波转矩相位,分析了内外电机纹波转矩相位对整个电机纹波转矩的影响。在内外定子槽数相同时,基于电动势和电流的转矩模型,论证了内外定子A相轴线的相对位置会影响整个电机的转矩脉动大小。通过有限元仿真,验证了以上的理论预测。
关键词:双定子低速大转矩永磁同步电动机 转矩脉动 叠加原理 反电动势 相位分析
近年来永磁材料迅速发展,使得永磁电机在工业生产中得到了较为广泛的应用。其中低速大转矩永磁同步电动机由于取消了传统驱动系统中的减速环节,同时相比较于异步电动机又具有高功率因数、高效率等一系列优点,在油田开采、电力推进、港口起重等方面有更为良好的应用前景[1-2]。然而传统的低速大转矩永磁同步电动机普遍存在体积大导致的功率密度或者转矩密度低的情况,为了提高低速大转矩电机的空间利用率,国内外学者提出用双定子拓扑来取代传统的单定子拓扑[1, 3-4]。
电动机转矩脉动的研究一直是一个相当重要的课题,国内外学者对传统单定子永磁同步电动机的转矩脉动都有相当丰富的研究成果。文献[5]提出一种基于比例积分-准谐振控制器的方法改善了定子电流波形达到降低转矩脉动的效果。文献[6]采用梯度下降法对注入的谐波电流进行优化,不仅降低了电机的转矩脉动也降低了注入的谐波电流的幅值。文献[7]提出一种基于轴向永磁体组合的方法达到降低表贴式永磁同步电动机齿槽转矩的效果。文献[8]采用多层绕组的方法降低了特定极槽配合下偶数次反电动势谐波引起的转矩脉动。文献[9]利用不等宽齿对定子饱和引起的转矩脉动进行了削弱。双定子永磁同步电动机转矩脉动研究虽然较单定子的稍欠丰富,但不乏优秀成果。文献[10]分析和研究了内外定子绕组匝数对串联式绕组双定子永磁同步电动机转矩脉动的影响。文献[11]提出了一种新型永磁体拓扑用于提高气隙磁通密度正弦度进而降低了双定子永磁同步电动机的转矩脉动。文献[12]利用相位因素削弱了双定子永磁同步电动机的齿槽转矩。文献[13]采用电枢或者磁极错位的方法有效地降低了双边型永磁直线电机的推力波动。
通过对一些关于谐波电流注入抑制永磁同步电动机纹波转矩文献的研究可知,谐波电流注入是最经典的方法,即提取谐波反电动势的幅值和相位,在此基础上,匹配相应的谐波电流并注入定子绕组。因此,只要能估计或者大致计算出谐波反电动势的相位,就可以对纹波转矩的相位进行评估,而在研究单定子永磁同步电动机转矩脉动的过程中,基于有限元方法,注意到极槽配合对电机转矩脉动相位存在影响,进一步地,应用在双定子永磁同步电动机中就是通过调整电机的内外定子槽数,使得内外电机纹波转矩相位反相以获得较低转矩脉动的效果,并为双定子永磁同步电动机的设计提出指导。
本文在文献[12-13]的基础上,对双定子永磁同步电动机内外定子槽数配合和内外定子轴线错开对整个电动机转矩脉动的影响进行了研究并着重讨论了转矩脉动的相位问题。对于内外定子槽数的配合,由于双定子电机中内定子部分尺寸的限制,如果内外定子槽数取得同样多,可能会使得内定子齿部饱和严重,进而导致内定子和转子间的气隙磁场含有大量谐波,恶化转矩脉动。因此,设计电机时,让内定子槽数少于外定子,可以减少内定子饱和的风险。但是不同的槽数配合,意味着绕组形式不同,绕组电动势的谐波也会有所变化,进而对转矩脉动也有所影响,考虑通过不同的内外定子槽数配合,使内外电机转矩脉动相位相反,进而使两者相互削弱,从而降低整个电机的转矩脉动。本文基于叠加原理,首先在直轴与A相轴线对齐的条件下,对绕组进行分析,给出整个电机在仅包含纹波转矩的数学模型,对内外定子槽数对纹波转矩相位的影响进行了讨论,研究了影响纹波转矩相位的关键因素。在内外定子槽数相等的情况下,基于电动势和电流建立的转矩模型分析了内外定子A相轴线位置的相对位置对电机纹波转矩以及齿槽转矩的影响,给出了当整个电机转矩脉动最小时,内外定子轴线的错开角度。最后利用有限元方法对以上的理论分析进行了验证。本文两种方法采用较为简单的电机拓扑,使电机整体的转矩脉动较低,实际工程中降低了设计成本。
本文研究所涉及的电机的磁力线分布如图1所示,从图1中可以看到,相同充磁方向的磁极在转子的同一位置。由于表贴式永磁同步电动机,交轴、直轴电抗近似相等,在分析时,更多地考虑空载下电机的磁路。因此,在忽略漏磁场和不考虑电枢反应的情况下,主磁路中,内气隙N极发出的磁力线经由转子到达外气隙侧的N极,再从外气隙侧的N极由外气隙进入外定子,磁力线穿出外定子,进入外气隙中的S极,再由转子进入内气隙侧的S极、内定子,最后进入内气隙侧的N极。图2是从图1中抽象出忽略漏磁场的磁路模型。图中,Rs_o和Rs_i分别为外定子和内定子部分的磁阻,Rd_o和Rd_i分别为外气隙和内气隙的磁阻,Rr为转子磁阻,Fm为每个永磁体提供的磁动势,Fm为主磁路的磁通。
图1 电机磁力线分布
Fig.1 Distribution of the flux lines of the motor
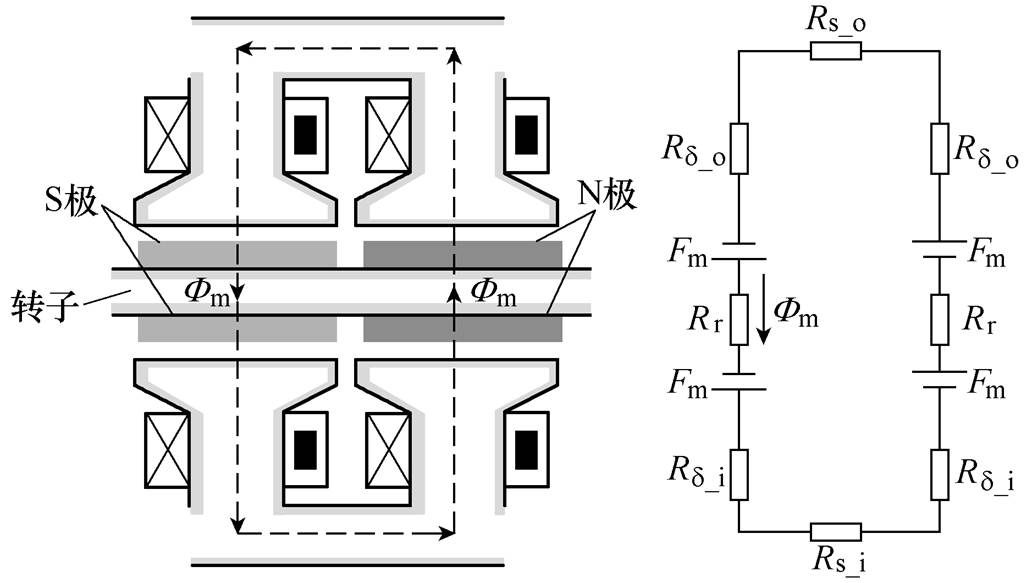
图2 忽略漏磁场的磁路模型
Fig.2 Magnetic circuit model ignoring the leakage magnetic field
从图2可知,在铁心磁导率无穷大的情况下,可以忽略转子的磁压降,那么一侧气隙上的磁压降约等于一侧永磁体提供的磁压降,因而,利用叠加原理将双定子表贴式永磁同步电动机拆开成内外两个电机分别研究是合理的。
对于本研究而言,基于以上论述,采用叠加原理来考虑整个电机的转矩脉动时式(1)成立。
 (1)
(1)
式中,Trip_tot为整个电机的转矩脉动;Trip_o和Trip_i分别为外电机和内电机的转矩脉动。对永磁同步电动机而言,转矩脉动中包含两个方面:一方面是6及6整数倍频的纹波转矩,其中危害最大的是6倍频成分;另一方面是永磁电机独有的齿槽转矩。
这一节中,双定子电机内外定子的槽数不一样,另外考虑到分数槽集中绕组的优点[14-15],本文选择了外定子槽数/内定子槽数为18/15、21/15、24/15以及27/18。
对于单定子永磁同步电动机,在定子只通入初相为0的基波正弦波电流且直轴电流分量为0的情况下,通过反电动势和定子电流,可以得到6倍频纹波转矩表达式为
 (2)
(2)
式中,E7、E5和j7、j5分别为7次、5次反电动势幅值和初相位;I为定子电流幅值;W 为机械角速度。利用正余弦定理,式(2)可写成
 (3)
(3)
其中
 (4)
(4)
 (5)
(5)
可以看到,6倍频纹波转矩的相位由5次和7次反电动势共同决定。
为方便分析问题,用电机空载时的反电动势代替实际的反电动势来分析绕组对6倍频纹波转矩相位的影响。
空载时,按电动机惯例,在A相轴线与直轴对齐以及id=0的情况下,处于绕组A相轴线位置的单个线圈上产生的反电动势可以表示为
 (6)
(6)
式中,Nc为线圈的匝数;FPM为处于轴线位置处该线圈交链的永磁体磁通。
本文中的电机其一侧永磁体(Permanent Mag- nets, PMs)磁场在空间中沿电枢表的分布可近似如图3所示,由于本文中的电机采用集中绕组,每个线圈都是缠绕在一个定子上,因此线圈轴线应与定子齿中心线重合。图3中直轴与绕组的A相轴线位置重合。
如果认为永磁体的相对磁导率为1,且不计及开槽的情况,气隙中的磁通密度表达式为
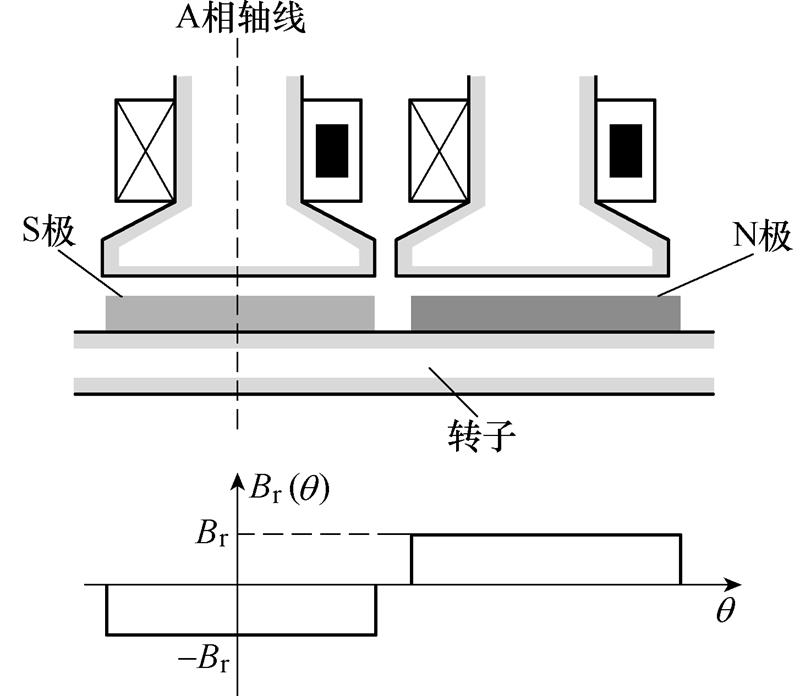
图3 永磁体磁场在空间中的分布
Fig.3 The spatial distribution of the magnetic field of PMs
 (7)
(7)
将式(7)进行傅里叶分解,则有
 (8)
(8)
式中,Br(q)为永磁体剩余磁通密度沿圆周方向分布;Br为剩余磁通密度的大小;hm为充磁长度;d 为气隙长度;ap为永磁体的极弧系数。对该线圈交链的磁场进行积分,并将静止磁场替换为旋转磁场后,永磁体与线圈相交链的磁链为
 (9)
(9)
式中,w 为旋转磁场角速度;t 为电机的极距; 为电枢表面半径;Lef为铁心轴向有效长度;kdn= sin(np/2t)即为绕组的谐波短距系数。
为电枢表面半径;Lef为铁心轴向有效长度;kdn= sin(np/2t)即为绕组的谐波短距系数。
由式(6)及式(9),处于A相轴线位置处的线圈上产生的反电动势e为
 (10)
(10)
如果一台电机可以分成t个单元电机,每个单元电机每相槽数为j,且j为奇数,考虑到本研究中电机的并联支路数为1,那么结合式(6)整个电机的A相反电动势就有
 (11)
(11)
其分布情况可以由分布系数kpn表达,绕组的分布系数由式(12)计算。
 (12)
(12)
综合短距系数和分布系数的情况,绕组系数为
 (13)
(13)
对式(11)进行分析,可以发现无论n取多少,随时间变化的正弦量sin(nwt)的初相位总是0,但由于其前面相乘的三个系数:kdn、kpn以及sin(npap/2)的乘积kn随定子槽数的不同而或正或负,这会为正弦量增加一个kp 的初相位,乘积为正值表示谐波与基波初相位同相,k为偶数;乘积为负值,则表示谐波与基波初相位相反,k为奇数。结合式(5)可以得出,永磁体参数以及绕组系数会直接影响纹波转矩的相位。
以16极、永磁体极弧系数ap取0.7的电机为例,系数kn的计算结果见表1。
表1 kn的计算结果
Tab.1 The calculation results of kn
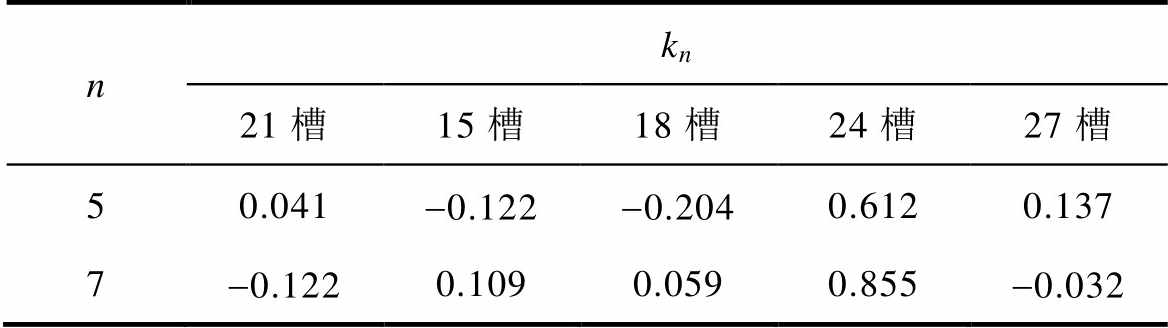
nkn 21槽15槽18槽24槽27槽 50.041-0.122-0.2040.6120.137 7-0.1220.1090.0590.855-0.032
基于表1的结果,以角度制表示,预测的反电动势初相位见表2。
表2 反电动势初相位的预测结果
Tab.2 The predictive initial phase angle of the back-EMF
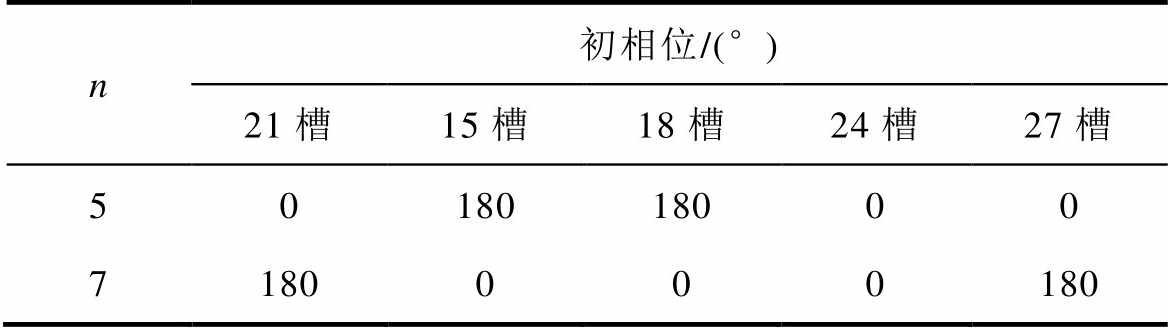
n初相位/(°) 21槽15槽18槽24槽27槽 5018018000 7180000180
有限元仿真得到的5次及7次反电动势的初相位如图4所示,与理论分析不同的是,有限元得到的相位由余弦表示,其数值上会滞后理论预测值p/2。图4的结果表明,理论预测的反电动势相位与有限元结果较为接近,印证了上述分析。
本文以一台额定转矩为573N×m、额定转速为75r/min的双定子永磁同步电动机为例,对纹波转矩相位进行验证,该电机的相关尺寸和性能参数见表3。
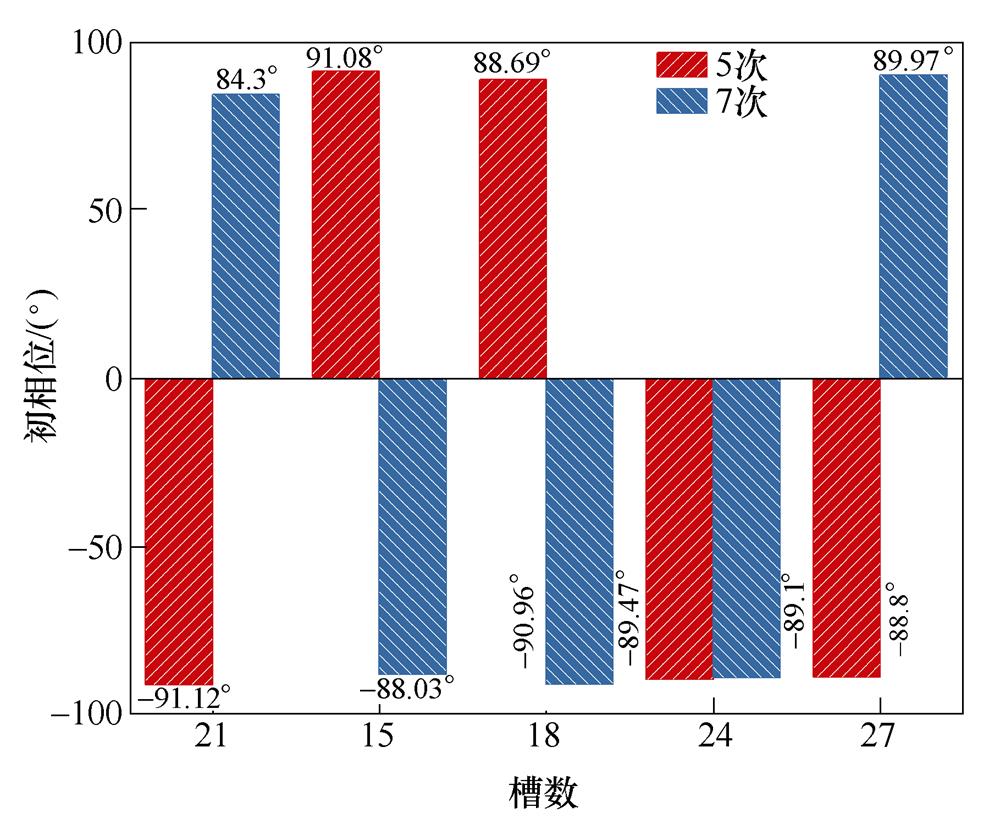
图4 有限元下的反电动势初相位
Fig.4 Initial phase angle of the back-EMF by FEM
表3 电机的尺寸和性能参数
Tab.3 The size and performance parameters of the investigated motor
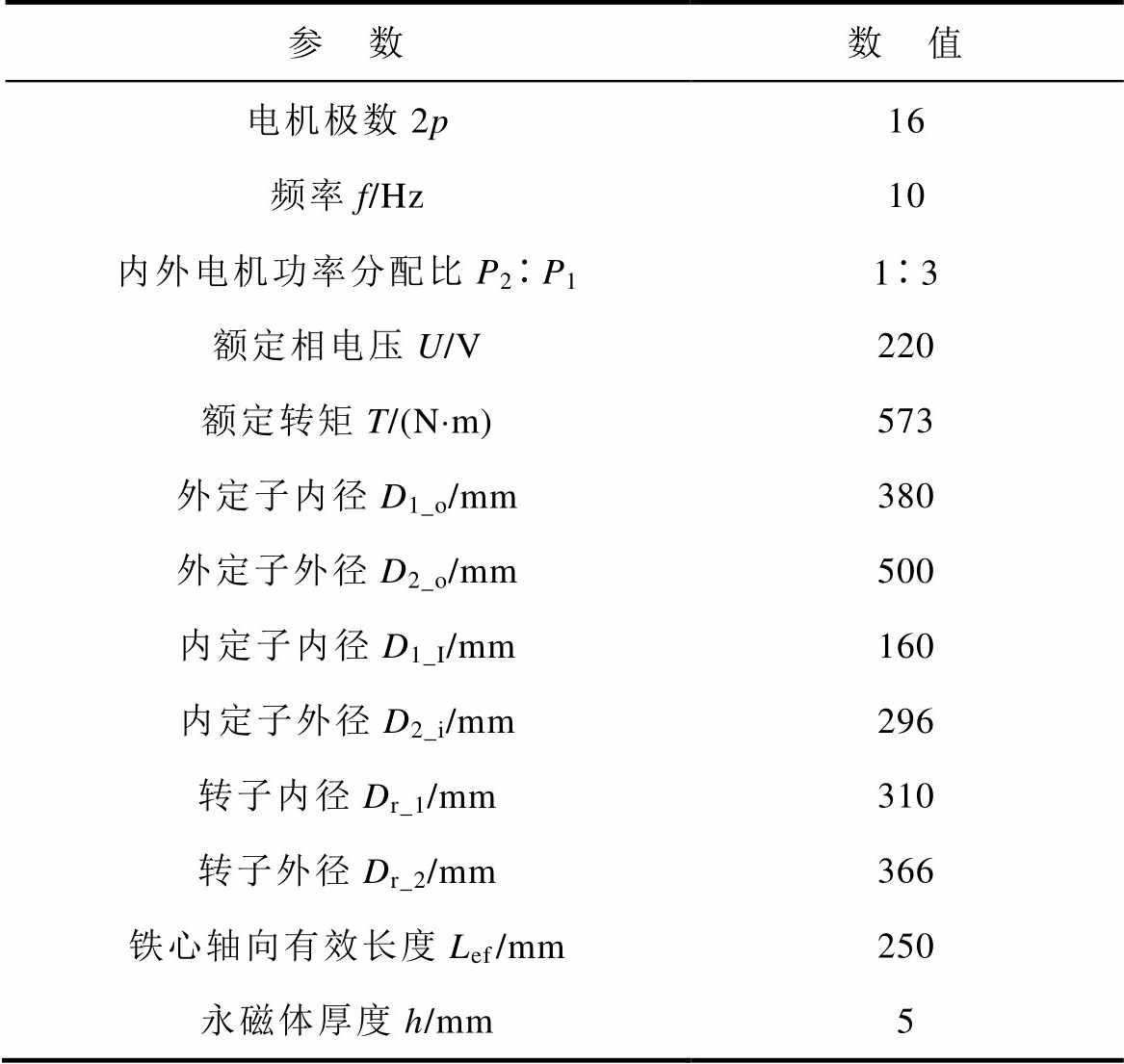
参 数数 值 电机极数2p16 频率f/Hz10 内外电机功率分配比P2P113 额定相电压U/V220 额定转矩T/(N×m)573 外定子内径D1_o/mm380 外定子外径D2_o/mm500 内定子内径D1_I/mm160 内定子外径D2_i/mm296 转子内径Dr_1/mm310 转子外径Dr_2/mm366 铁心轴向有效长度Lef/mm250 永磁体厚度h/mm5
由理论分析得到的相位结合式(5)可以预测电机在不同槽数下6倍频纹波转矩的相位,以角度值表示,结果见表4。
表4 6倍频纹波转矩初相位的预测结果
Tab.4 The predictive initial phase angle of the 6th order component of the ripple torque
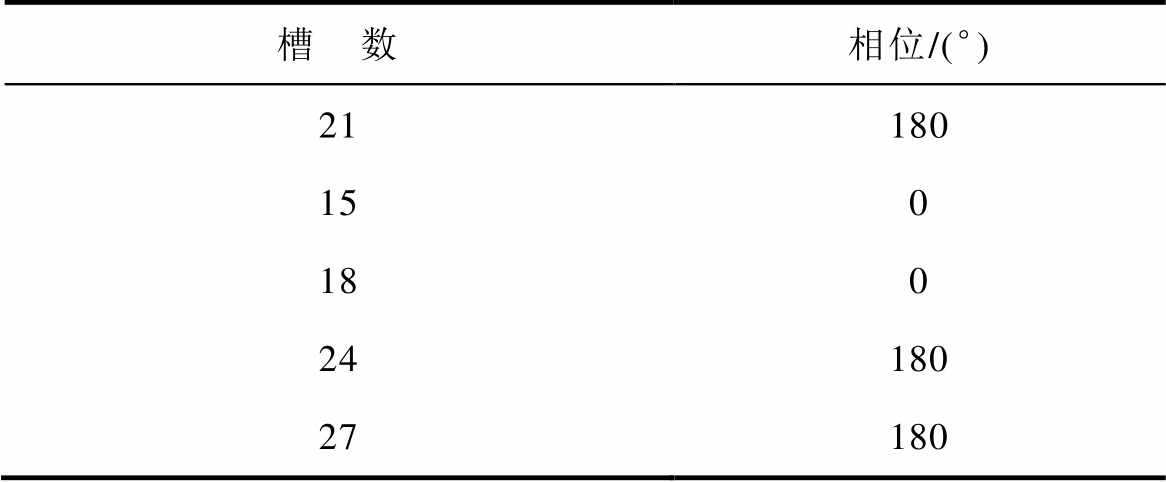
槽 数相位/(°) 21180 150 180 24180 27180
从预测的结果上看,如果将不同槽数进行两两组合,就能够使双定子永磁同步电动机内外电机的转矩脉动出现相互增强或者相互削弱的效果。表5是外/内定子槽数分别是21/15、18/15、24/15以及27/18的双定子永磁同步电动机6倍频纹波转矩通过有限元得到的相位结果。
表5 有限元下的内外电机6倍频纹波转矩相位
Tab.5 Phase angle of the 6th order component of the ripple torque of the inner and outer motor by FEM
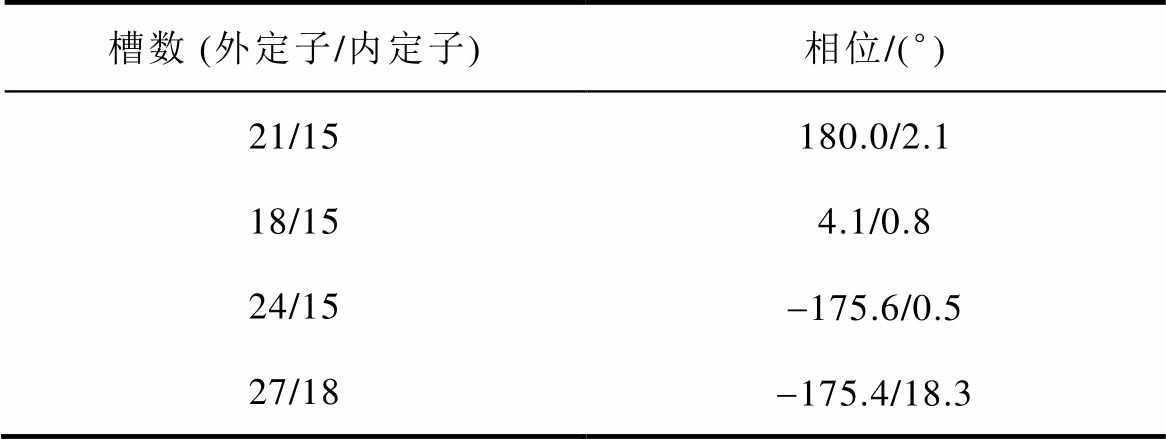
槽数 (外定子/内定子)相位/(°) 21/15180.0/2.1 18/154.1/0.8 24/15-175.6/0.5 27/18-175.4/18.3
从实际的有限元仿真结果来看,21槽的相位预计值是最接近仿真值。其中外/内定子槽数位21/15、24/15及27/18这几个内外定子槽数配合下的双定子永磁同步电动机,其内外电机6倍频纹波转矩是相互削弱的,这一点表4与有限元结果是吻合的。虽然内定子18槽的情况,与预计的值有较大的误差,但是从相位上看,也基本上与外电机的纹波转矩相位差达到了180°,实现了内外电机纹波转矩相互削弱的效果,其余的情况下,理论预测的相位都较为接近仿真值。
尽管对相位的预测在一定范围内是准确的,但是内外电机纹波转矩之间的相互增强或者削弱程度还与纹波转矩幅值的大小有关。然而对于内外电机各自6倍频纹波转矩幅值的预测,从以上分析出发是较为困难的,原因在于:其一,没有考虑电机开槽,即没有计及卡特系数对气隙磁场的影响;其二,用矩形波来代替实际永磁体在空间中产生的磁场是存在误差的;其三,稀土永磁体的剩磁很高,容易使铁心磁路饱和,尤其是铁心齿部,以上的分析是基于磁路是线性的情况。
图5为有限元仿真得到的双定子永磁同步电动机6倍频纹波转矩幅值随内外定子槽数配合的情况。
从图5中可以看到,在总的输出转矩不变,即都为573N×m的情况下,外电机中18槽的纹波转矩幅值最小,然而由于内电机的纹波转矩相位与外电机的基本上同相,使得整个电机的纹波转矩幅值相对较高,21/15内外电机的6倍频纹波转矩相互削弱,同时其外电机纹波转矩的幅值相对于外电机24和27又更小,在内外电机纹波转矩叠加后,幅值在所考察的四个组合里是最低的,因此21/15的纹波转矩引起的转矩脉动应当在这四个组合中是最小的,另外对于24/15,外电机24槽,其齿槽转矩的周期数与其余槽数下的齿槽转矩周期数相比,要远小于其余槽数下的,因而,从齿槽转矩的角度看,24/15配合下的电机转矩脉动最高,综合这两点,在内外电机6倍频纹波转矩能够相互削弱的三组(21/15、24/15以及27/18)中,24/15配合的转矩脉动应当是最大的。图6和图7分别是负载时在时域下这四个组合输出转矩的比较以及各种配合下内外电机与整个电机的输出转矩。
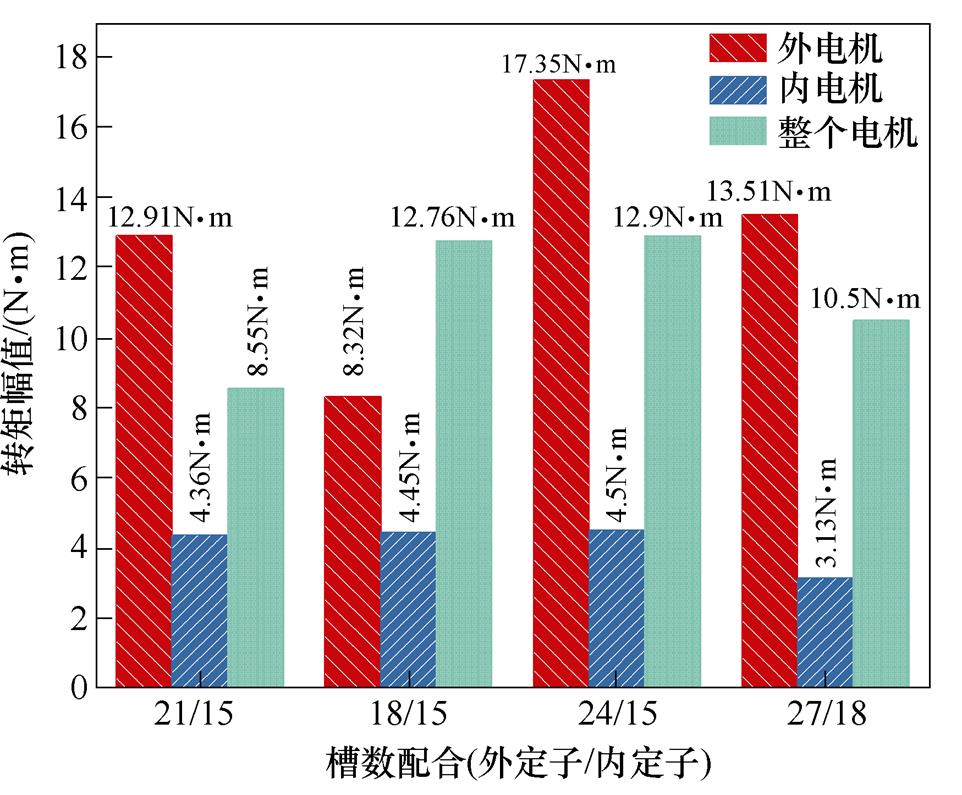
图5 有限元下的6倍频纹波转矩幅值
Fig.5 Amplitude of the 6th order component of the ripple torque by FEM
图6的结果表明,对于双定子永磁同步电动机,其内外定子槽数配合确实会产生不同大小的转矩脉动,其中21/15配合下的电机转矩脉动最小,为5.86%,18/15配合下的转矩脉动最大,达到了8.89%。图7是更直观的时域下的结果,表明在电机直轴初始时与A相轴线对齐,极数一定的情况下,某一侧定子槽数会对该侧的6倍频纹波转矩的相位产生影响,使内外电机的脉动相互增强或者削弱。通过合理选取内外定子的槽数,可以使得双定子永磁同步电动机的转矩脉动得到削弱。
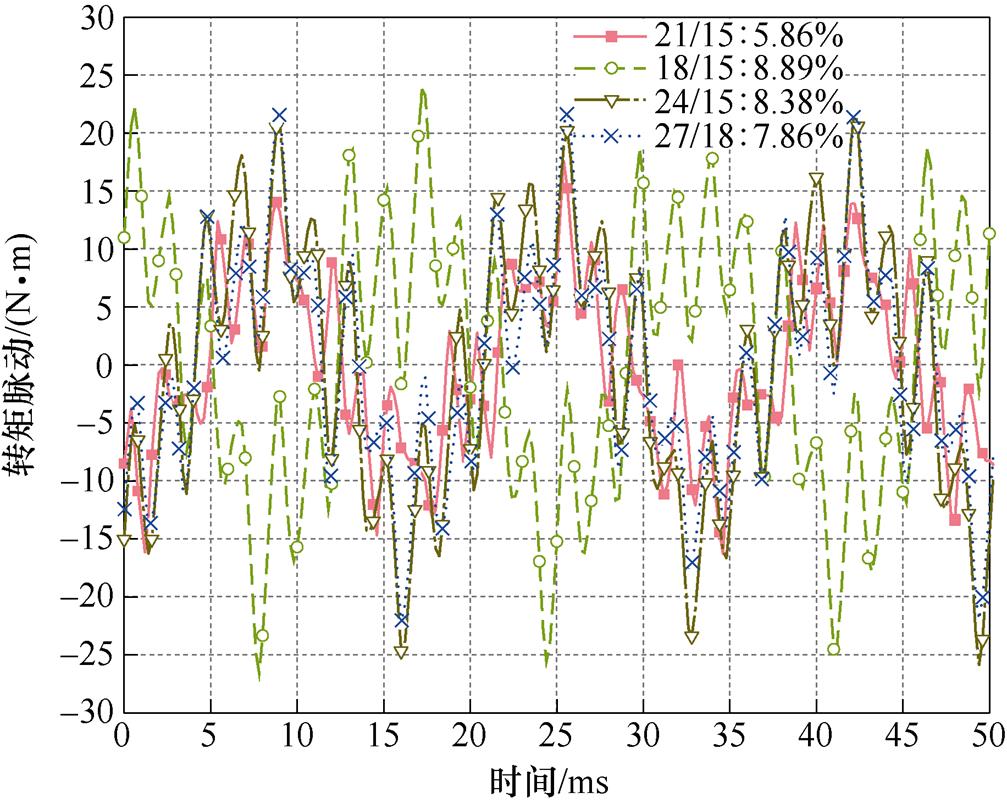
图6 时域中四个组合下电机转矩脉动的比较
Fig.6 Comparison of the torque ripple of the motor with the four combinations under the time domain
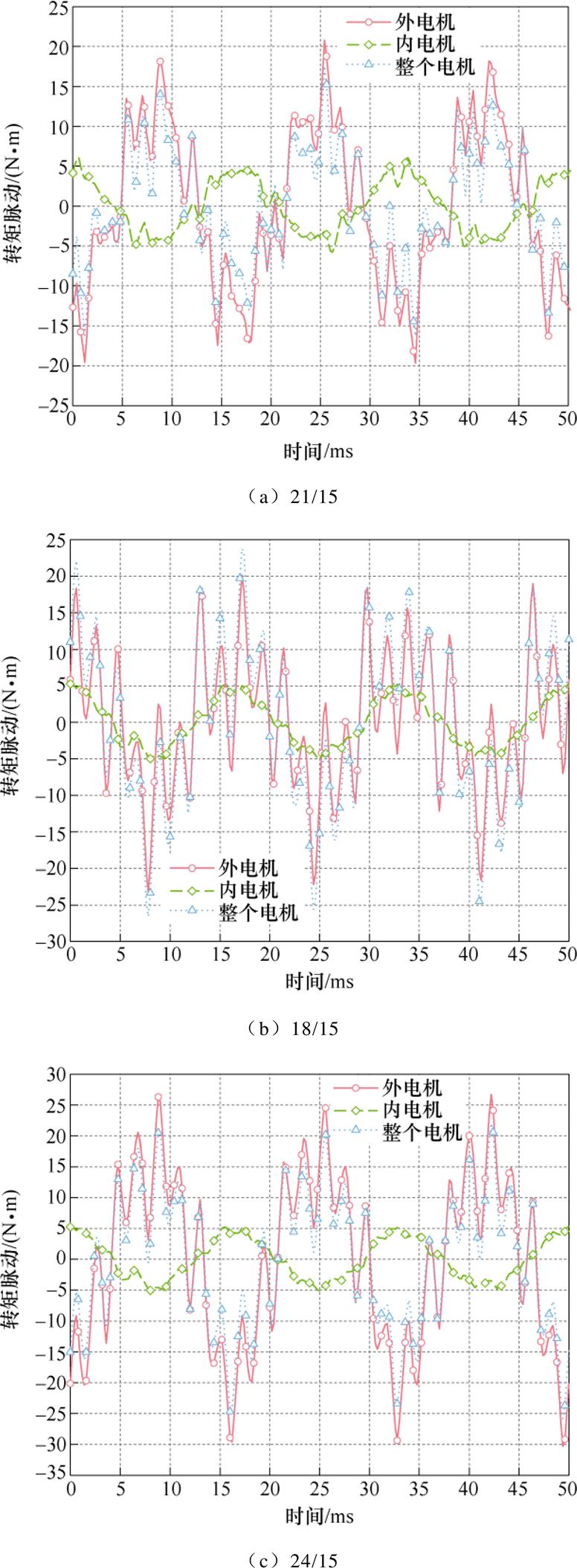
图7 各个槽数配合下内外和整个电机的转矩脉动
Fig.7 The torque ripple of the inner and outer and whole motor with each combination
初始状态下,电机A相轴线偏移直轴z 电角度如图8所示。
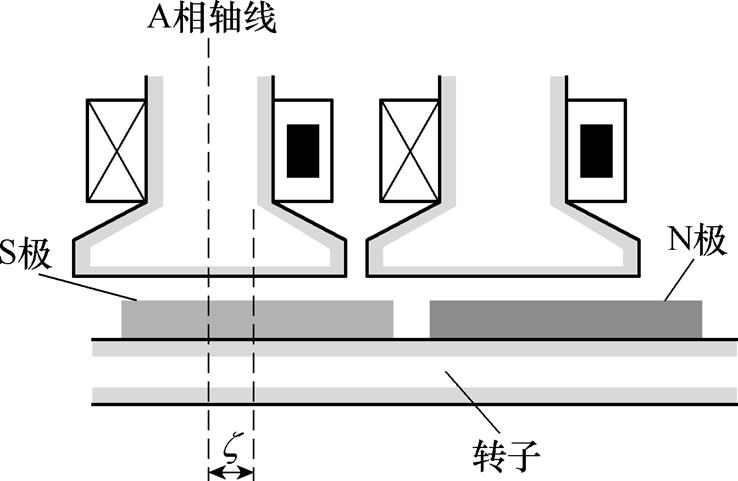
图8 A相轴线偏移直轴z 电角度
Fig.8 The A-phase axis offsetting the d-axis by z
那么式(8)可改写成
 (14)
(14)
因此,电机三相的反电动势有
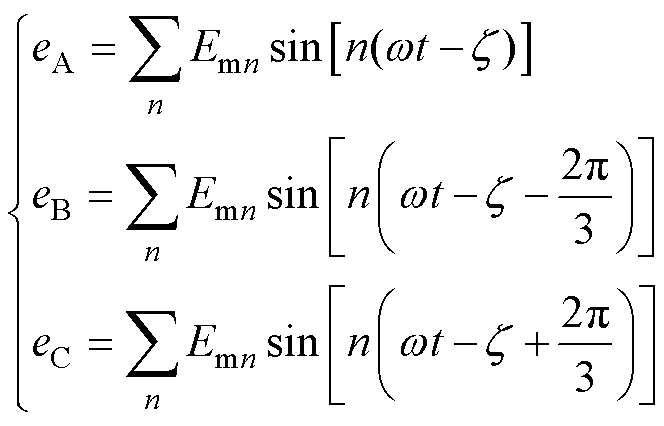 (15)
(15)
考虑到转子初始位置未动,电机的直轴位置便未发生改变,由于定子偏移了z 电角度,因此交轴电流也偏移了原来位置即交轴z 电角度,如图9所示。
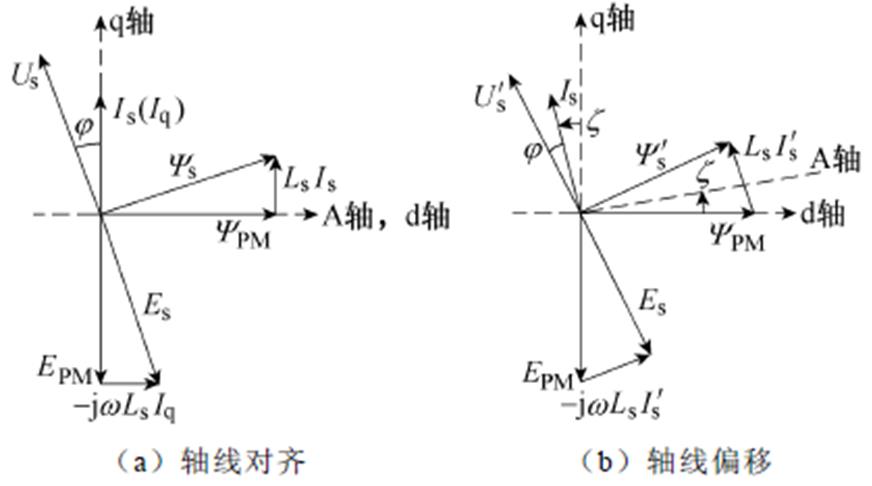
图9 定子轴线对齐和偏移时的相量图
Fig.9 Phasor diagrams when the stator axis is aligned and offset
由图9可知,要保持电机直轴电流为0的控制策略就需要对输入的电流相位进行调整,具体而言,有
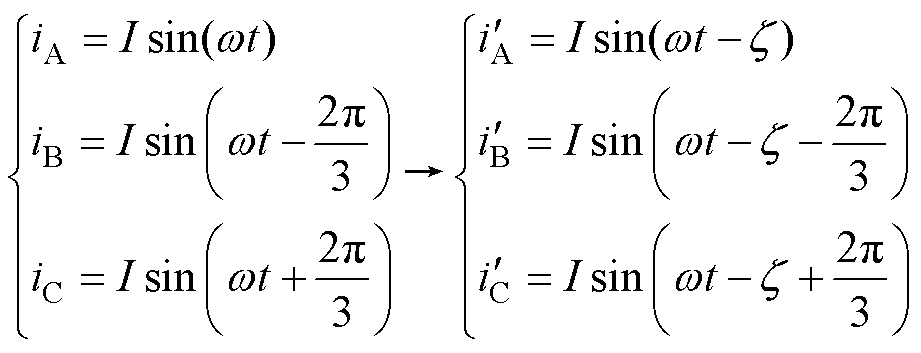 (16)
(16)
式(16)箭头左端是相位调整前,右端是调整之后。
基于式(15)和式(16),调整后6倍频纹波转矩式为
 (17)
(17)
式(17)表明,A相轴线与电机直轴的初始相对位置只要发生变化,则6倍频纹波转矩的相位也会发生相应变化。这对双定子永磁同步电动机的意义在于,双边定子只需要恰当调整其中一个的A相轴线与直轴的相对位置,就可以使内外电机的6倍频纹波转矩相互削弱。
以内外定子槽数都是18槽的双定子永磁同步电动机为例,其额定的输出转矩不变。另外,实际上由于本节中内外定子的槽数一样,这给讨论齿槽转矩创造了条件。在电机A相轴线与直轴对齐时,内外电机6倍频纹波转矩的相位显然由前述分析是同相的。如果内定子轴线偏移一定角度,使偏移后内电机6倍频纹波转矩与外电机部分反相,偏移的电角度z 需要满足
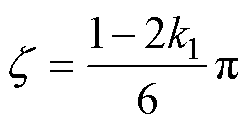 (18)
(18)
式中,k1为整数。
对于齿槽转矩,一般有方程式
 (19)
(19)
式中,Nco=LCM(Q, 2p)为齿槽转矩的周期数,即槽数与极数的最小公倍数,Q为整个电机的槽数;qM为机械角度。对本节中18槽16极电机而言,Nco为144。在内定子轴线偏移了z 的电角度后,式(19)可改写为
 (20)
(20)
同时考虑到齿槽转矩由于仿真是基于瞬态场,且齿槽转矩是电机在空载并以同步转速旋转的情况下得到,因此,对齿槽转矩方程需要做一些修改以匹配同步速瞬态场的情况。修改后的方程为
 (21)
(21)
对于齿槽转矩的基波也就是18倍频而言,希望内外电机的齿槽转矩基波相位差为p,因此在齿槽转矩下,z 还需要满足
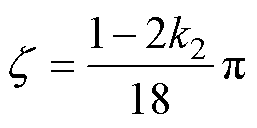 (22)
(22)
式中,k2为整数。由于轴线偏移的角度一定,因此对本节的电机而言,k1与k2满足
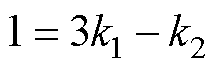 (23)
(23)
取k1和k2分别为-1和-4,即z =p/2。内定子偏移p/2后,内电机的齿槽转矩相较于轴线偏移前也产生了p 的相位变化,即与偏移前反相。
图10和图11分别是内电机定子轴线对齐和偏移后两种情况下时域下内电机和整个电机的转矩。
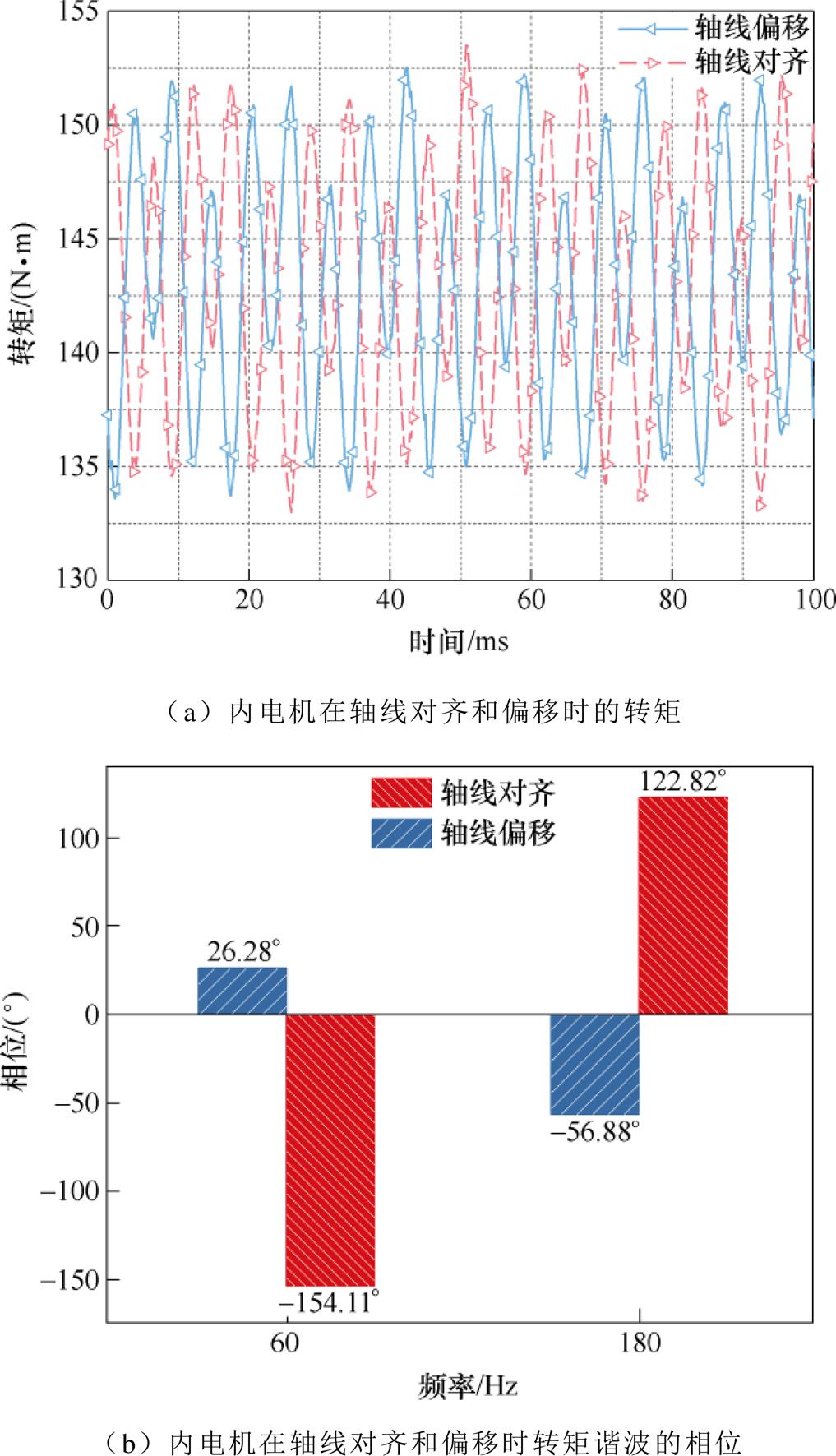
图10 内定子轴线对齐和偏移时内电机的转矩
Fig.10 The torque of the inner motor when the inner stator axis is aligned and offset
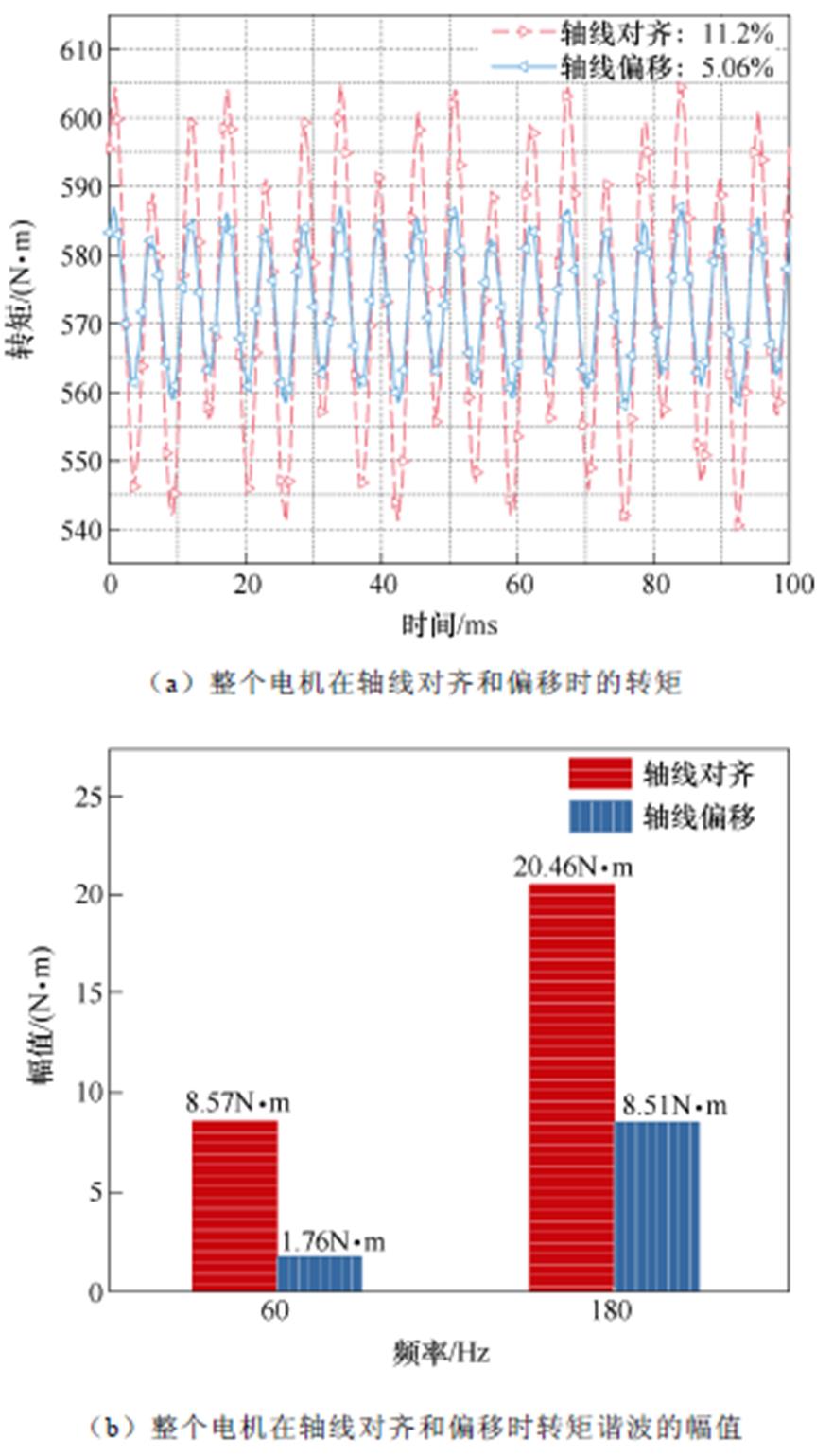
图11 内定子轴线对齐和偏移时整个电机的转矩
Fig.11 The torque of the whole motor when the inner stator axis is aligned and offset
图10表明从相量图出发的分析与有限元的结果吻合得较好,在内定子轴线偏移p/2电角度后,内电机6倍频纹波转矩相位增加了p,同时在偏移后齿槽转矩同偏移前相比,相位同样增加了p。图11证明在内定子轴线偏移p/2电角度后,内外电机主要的转矩谐波能够相互削弱,使整个电机的转矩脉动大大降低,在偏移后相较于偏移前,6倍频纹波转矩,降幅达到79.46%,齿槽转矩降幅达到58.41%,整个转矩脉动由偏移前的11.2%降至5.06%,降幅达到54.8%,因而在内外电机转矩脉动同相的情况下,可以通过调整一侧定子A相轴线位置与电流相位,降低整个电机的转矩脉动。
本文对双定子低速大转矩分数槽集中绕组永磁同步电动机的转矩脉动进行了研究。从叠加原理出发,将双定子永磁同步电动机分为内外两个电机分别研究各自的转矩脉动。对两种情况下的相位问题进行了分析,第一种情况是内外定子槽数不同而定子A相轴线与直轴对齐,第二种情况是内外定子槽数相同而定子A相轴线不与直轴对齐,研究结论如下:
1)在第一种情况下,通过理论推导,发现了影响纹波转矩相位的关键因素,即谐波绕组系数以及含有永磁体极弧系数的傅里叶系数,这两者乘积的正负性会影响纹波转矩的相位,根据该系数的正负性可以对6倍频纹波转矩的相位进行预测,由此可以恰当地选择内外定子槽数配合,使内外电机纹波转矩的相位相差接近p 电角度,以使内外两部分纹波转矩相互削弱。
2)第二种情况下,当A相轴线初始位置与直轴有偏移角度时,推导了反电动势关于偏移角度的表达式,并通过相量图,对原始的电流源相位进行修正,进一步得到第二种情况下纹波转矩的表达式,通过对表达式的考察,确定了6倍频纹波转矩被削弱时的偏移的电角度需要满足的条件,即p/6的奇数倍,当有其他阶次如n倍频谐波的转矩时,削弱该阶次时的偏移电角度为p/n的奇数倍,取以上两者的交集即为整个电机转矩脉动较低时的偏移电 角度。
3)通过有限元仿真,验证了在以上两种情况下理论分析的结果,从电机本体设计的角度出发,减小了双定子永磁同步电动机的转矩脉动。第一种情况下,在本文所选择的四种内外定子槽数配合中,转矩脉动最低的是21/15,其转矩脉动为5.86%,最大的是18/15,为8.89%,相差了34%。第二种情况下,内定子轴线偏移后,使整个电机的转矩脉动降低了54.8%。
参考文献
[1] 鲍晓华, 刘佶炜, 孙跃, 等. 低速大转矩永磁直驱电机研究综述与展望[J]. 电工技术学报, 2019, 34(6): 1148-1160.
Bao Xiaohua, Liu Jiwei, Sun Yue, et al. Review and prospect of low-speed high-torque permanent magnet machines[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1148-1160.
[2] 陈浩, 刘向东, 赵静. 高带宽低速大转矩永磁同步电动机的优化设计[J]. 电工技术学报, 2014, 29(增刊1): 108-114.
Chen Hao, Liu Xiangdong, Zhao Jing. Design and optimization of a high-bandwidth low-speed high- torque permanent magnetic synchronous motor[J]. Transactions of China Electrotechnical Society, 2014, 29(S1): 108-114.
[3] Zhang Jiaxu, Zhang Bingyi, Feng Guihong, et al. Design and analysis of a low-speed and high-torque dual-stator permanent magnet motor with inner enhanced torque[J]. IEEE Access, 8: 182984-182995.
[4] Zhang Zhaoyu, Yu Siyang, Zhang Fengge, et al. Electromagnetic and structural design of a novel low- speed high-torque motor with dual-stator and PM- reluctance rotor[J]. IEEE Transactions on Applied Superconductivity, 2020, 30(4): 1-5.
[5] 张海洋, 许海平, 方程, 等. 基于比例积分-准谐振控制器的直驱式永磁同步电机转矩脉动抑制方法[J]. 电工技术学报, 2017, 32(19): 41-51.
Zhang Haiyang, Xu Haiping, Fang Cheng, et al. Torque ripple suppression method of direct-drive permanent magnet synchronous motor based on proportional-integral and quasi resonant controller[J]. Transactions of China Electrotechnical Society, 2017, 32(19): 41-51.
[6] Yan Luocheng, Liao Yong, Lin Hao, et al. Torque ripple suppression of permanent magnet synchronous machines by minimal harmonic current injection[J]. IET Power Electronics, 2019, 12(6): 1368-1375.
[7] 鲍晓华, 吴长江, 方金龙. 轴向永磁体组合削弱表贴式永磁同步电机齿槽转矩的方法[J]. 电工技术学报, 2018, 33(18): 4231-4238.
Bao Xiaohua, Wu Changjiang, Fang Jinlong. Cogging torque reduction in surface-mounted permanent magnet synchronous motor by combining different permanent magnets in axial direction[J]. Transactions of China Electrotechnical Society, 2018, 33(18): 4231-4238.
[8] Li F, Wang K, Li J, et al. Suppression of even-order harmonics and torque ripple in outer rotor consequent- pole PM machine by multilayer winding[J]. IEEE Transactions on Magnetics, 2018, 54(11): 1-5.
[9] Petrov I, Ponomarev P, Alexandrova Y, et al. Unequal teeth widths for torque ripple reduction in permanent magnet synchronous machines with fractional-slot non-overlapping windings[J]. IEEE Transactions on Magnetics, 2015, 51(2): 1-9.
[10] Chai Feng, Xia Jing, Guo Bin, et al. Double-stator permanent magnet synchronous in-wheel motor for hybrid electric drive system[J]. IEEE Transactions on Magnetics, 2009, 45(1): 278-281.
[11] Asgari S, Mirsalim M. A novel dual-stator radial-flux machine with diametrically magnetized cylindrical permanent magnets[J]. IEEE Transactions on Indu- strial Electronics, 2019, 66(5): 3605-3614.
[12] Meng Ying, Lu Kaiyuan, Wu Lijian, et al. Reduction methods using canceling effect for cogging torque in dual-stator PM synchronous machines[C]//2019 IEEE International Electric Machines & Drives Conference, San Diego, CA, USA, 2019: 714-720.
[13] 卢琴芬, 张新敏, 黄立人, 等. 错位式双边型永磁直线同步电机优化设计[J]. 电工技术学报, 2013, 28(11): 35-41.
Lu Qinfen, Zhang Xinmin, Huang Liren, et al. Opti- mal design of shifted type double-sided permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2013, 28(11): 35-41.
[14] 许孝卓, 汪旭东, 封海潮, 等. 分数槽集中绕组永磁同步直线电机磁场解析计算[J]. 电工技术学报, 2015, 30(14): 122-129.
Xu Xiaozhuo, Wang Xudong, Feng Haichao, et al. Magnetic field calculation of the permanent magnet synchronous linear motor with fractional-slot con- centrated windings[J]. Transactions of China Electro- technical Society, 2015, 30(14): 122-129.
[15] 郑军强, 赵文祥, 吉敬华, 等. 分数槽集中绕组永磁电机低谐波设计方法综述[J]. 中国电机工程学报, 2020, 40(增刊1): 272-280.
Zheng Junqiang, Zhao Wenxiang, Ji Jinghua, et al. Review on design methods of low harmonics of fractional-slot concentrated-windings permanent- magnet machine[J]. Proceedings of the CSEE, 2020, 40(S1): 272-280.
Torque Ripple Analysis of Dual-Stator Surface Mounted Low-Speed High-Torque Permanent Magnet Synchronous Motors Based on Phase Analysis
Abstract For the torque ripple of dual-stator low-speed high-torque permanent magnet synchronous motor, this paper studies the influence of the slot number combinations and the relative position of inner and outer stators on the torque ripple of dual-stator permanent magnet synchronous motor based on the phase analysis. The whole motor is divided into inner and outer motors by the superposition principle, and the torque ripple is studied separately. When the slot numbers of the inner stators and outer stators are different, by analyzing the back EMF, it is found that the positive and negative harmonic winding factors will affect the phases of the back EMF of the inner and outer motors. Based on this, the phases of the back EMF of the inner and outer motors are predicted, the respective ripple torque phases of the inner and outer motors are further predicted, and the influence of the inner and outer motors’ ripple torque phases on the whole motor ripple torque is analyzed. When the slot numbers of the inner and outer stators are the same, based on the torque model of the back EMF and currents, it is demonstrated that the relative positions of the A-phase axis of the inner and outer stators will affect the torque ripple of the whole motor. The finite element simulation verifies the above theoretical predictions.
Keywords:Dual-stator surface mounted low-speed high-torque permanent magnet synchronous motor, torque ripple, superposition principle, back electromotive force (EMF), phase analysis
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.220692
国家自然科学基金项目(51977055)和安徽省重大科技项目(201903a05020042)资助。
收稿日期 2022-04-27
改稿日期 2022-05-24
E-mail: sukz@ustc.edu(通信作者)
朱 然 男,1997年生,硕士研究生,研究方向为永磁电机设计及优化。
E-mail: 2019110371@mail.hfut.edu.cn
(编辑 郭丽军)