 (1)
(1)
摘要 针对高度复杂的电力系统存在的建模误差和不确定性等问题,该文基于无模型自适应控制算法提出一种不依赖电力系统模型信息的负荷频率控制策略。首先将电力系统的动力学模型抽象为一般的非线性函数,在其I/O数据之间引入时变的伪偏导数,将非线性电力系统等效为动态线性数据模型;然后构建一个径向基神经网络在线估计系统的伪偏导数,并使用优化理论设计数据驱动的负荷频率控制方案,在理论上严格分析了闭环电力系统的稳定性和径向基神经网络估计方法的收敛性;最后在互联电力系统上验证该负荷频率控制方法在不利用模型信息的前提下,能够取得良好的跟踪性能。
关键词:互联电力系统 负荷频率控制 无模型自适应控制 径向基函数神经网络 数据驱动控制
频率是电力系统运行质量的一个关键因素,负荷侧和发电侧功率失衡会发生严重的频率波动,长期的频率偏差会导致联络线过负荷运转,甚至损害发电机设备。对于大规模的互联电力系统,频率控制是维持频率波动和联络线交换功率偏差处于设定范围内的必要措施。负荷频率控制(Load Frequency Control, LFC)对于保障电力系统安全稳定的运行有着重要的意义和研究价值[1-2]。
在过去的几十年里,研究人员提出了很多LFC策略成果[3-9]。这些LFC方法基于电力系统线性模型进行负荷频率控制器的设计,并且部分工作中使用线性矩阵不等式技术求解控制器的可行增益。它们的控制效果严格依赖预先建立的数学模型以及模型参数的准确性。然而,实际电力系统是一个复杂的非线性系统,各种物理限制和饱和约束使得建立准确的数学模型十分困难。前述基于模型的控制器设计方法在实际应用中遇到很多困难;另一方面,线性矩阵不等式技术也会大大加重控制器的计算负担,并且其增益的可行性又直接受到模型和参数的准确性影响。因此,设计不依赖模型信息的LFC具有重要意义。
数据驱动控制算法能够直接基于电力系统的I/O数据设计负荷频率控制器,避免了预先建模和辨识的过程。在电力系统中引入数据驱动控制算法设计频率控制器极具吸引力和研究价值[10]。现有的数据驱动LFC方案包括同步扰动随机逼近算法[11]、深度强化学习算法[12-13]和无模型自适应控制(Model-Free Adaptive Control, MFAC)算法[14-15]。其中同步扰动随机逼近算法和深度强化学习算法是迭代优化算法,并且其算法的实现需要在闭环电力系统中进行实验并采集数据,不可避免地会加重电力系统处理器的计算负担。而MFAC算法兼顾了自适应能力和在线控制特性,计算负担较小,能够在不使用电力系统模型信息的前提下,实现比较好的调频效果。在MFAC方案的设计过程中[14-15],将电力系统看作一般非线性模型,使用线性化手段将其等效为含有时变伪偏导数的动态线性数据模型,这就导致了电力系统的物理限制和未建模动态等非线性因素以及变化的负荷扰动会被压缩进时变参数伪偏导数(Pseudo Partial Derivative, PPD)中,其内部十分复杂,致使文献[14-15]中采用的改进投影辨识算法可能无法跟踪电力系统的PPD变化量。
事实上,PPD估计值是否准确直接影响到MFAC控制器的调频效果。文献[16-17]提出了一种基于自适应观测器的PPD辨识算法,但是仅证明了PPD的估计值是有界的,没有分析估计值与真实值之间误差的收敛性。为设计一种合适的PPD估计算法,径向基神经网络以其简单的结构和无限逼近的能力[18-19]成为一种可替代的选择。文献[20]利用径向基函数神经网络(Radial Basis Function Neural Network, RBFNN)的上述优点设计了一种PPD辨识算法,但文献中并没有给出辨识算法的稳定分析,并且RBFNN输入向量只包括控制输入数据,仅更新权重向量,并不适合高度复杂的电力系统。
考虑上述因素,为了弱化LFC控制器设计对电力系统模型精确性的依赖性,本文首先利用实时I/O数据构建一种基于数据的电力系统线性模型,采用RBF神经网络在线估计系统参数PPD;其次,基于MFAC算法设计数据驱动LFC方案(以下简称为RBFNN-MFAC),并且使用李雅普诺夫稳定理论严格分析闭环电力系统的稳定性;最后,在三区域互联电力系统中验证了本文方案的有效性。
在互联电力系统中,各个区域之间通过联络线连接,每个区域的频率波动都将影响到与其互联的区域。为了保证频率偏差和联络线功率偏差同时收敛到设定值内,定义每个控制系统的综合输出信号为区域控制偏差信号(Area Control Error, ACE),即
(1)
式中, 为频率偏差因子,
为频率偏差因子, ,
, 和
和 分别为下垂特性系数和等效阻尼系数。
分别为下垂特性系数和等效阻尼系数。
文献[8]给出了互联电力系统的简化线性模型,其中第 个控制区域的模型框图如图1所示。其动力学方程可以描述为
个控制区域的模型框图如图1所示。其动力学方程可以描述为
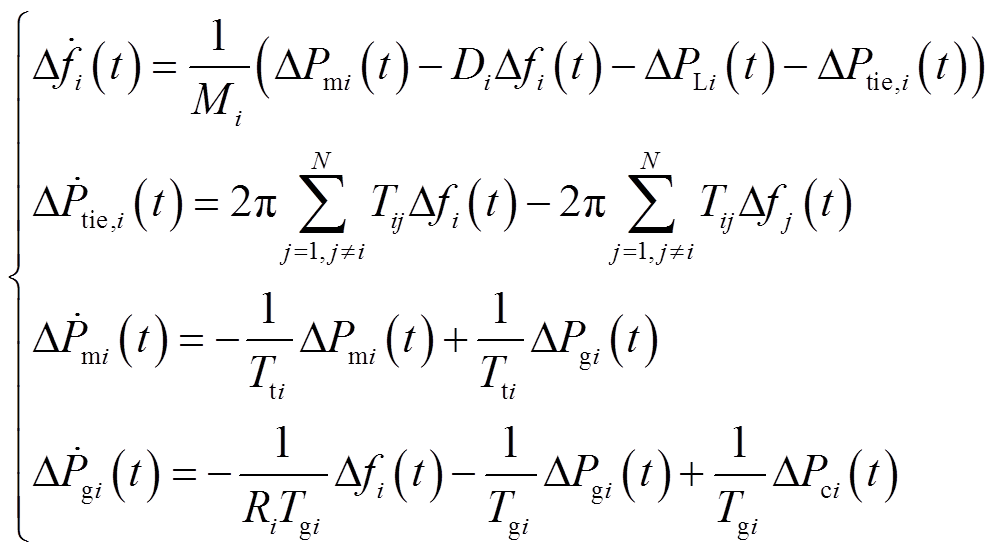 (2)
(2)
式中相关的电力系统参数和变量定义见表1。
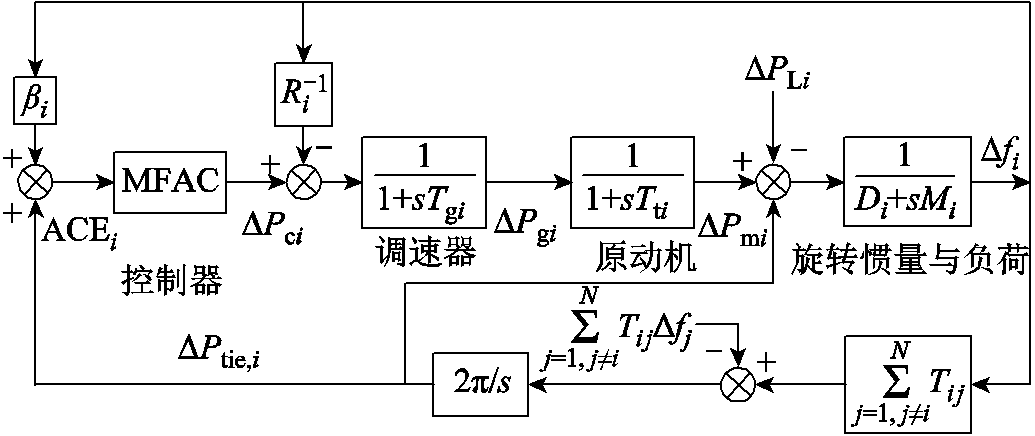
图1 互联电力系统模型
Fig.1 Interconnected power system model
表1 电力系统信号定义
Tab.1 Definition of the power system signal

符号定义 频率偏差/Hz 发电机机械功率变化量(pu) 调速器动作量(pu) 负荷扰动(pu) 联络线功率偏差(pu) 二次调频动作(pu) 调速器时间常数/s 联络线同步系数/(pu/Hz) 原动机时间常数/s 等效惯性系数/(pu·s) 等效阻尼系数/(pu/Hz) 下垂特性/(Hz/pu)
进一步,将电力系统的动力学方程(2)表述为状态空间方程形式,即
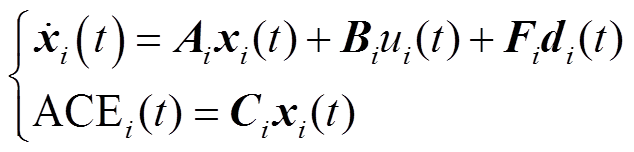 (3)
(3)
其中
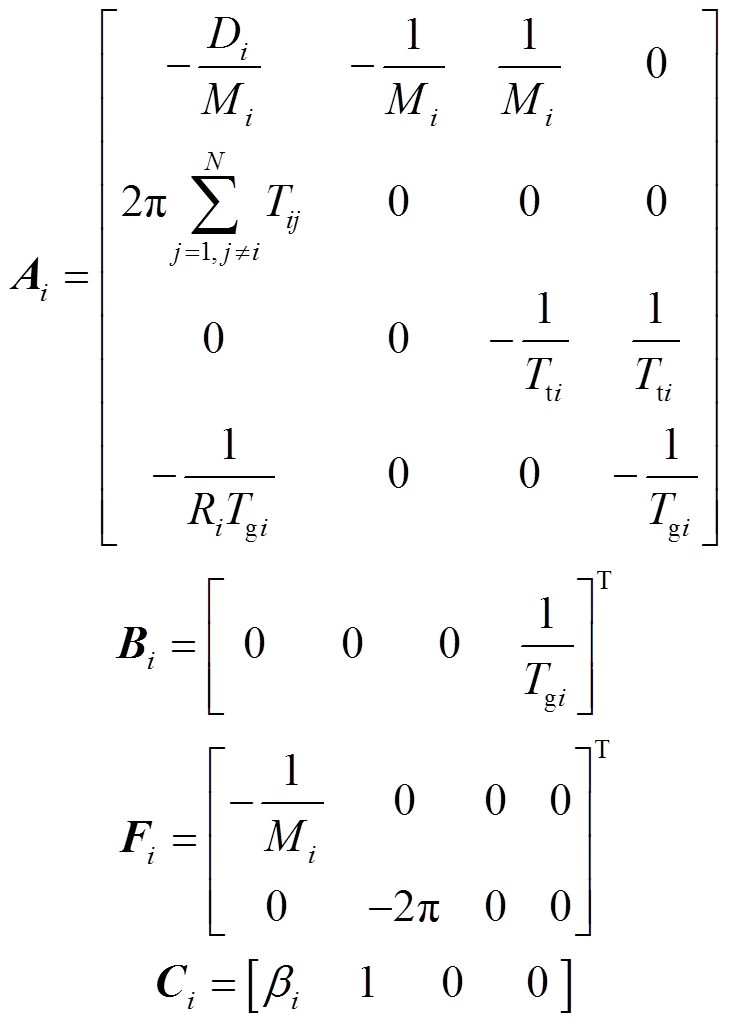
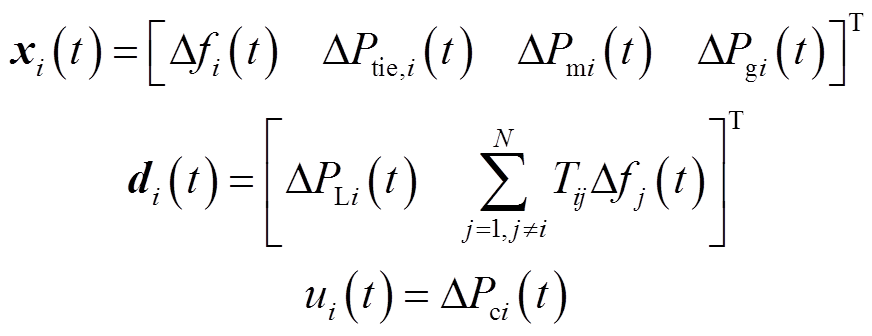
在电力系统状态空间方程(3)中,
 为系统矩阵,其元素由电力系统基本参数决定。在本文设计过程中,表1中的相关参数均假设未知,因此
为系统矩阵,其元素由电力系统基本参数决定。在本文设计过程中,表1中的相关参数均假设未知,因此 亦为未知矩阵。
亦为未知矩阵。
考虑到电力系统的实际工作情况,本文首先将连续的状态空间方程进行离散化处理。给定一个采样周期 ,离散后的电力系统线性模型可以重新表述为
,离散后的电力系统线性模型可以重新表述为
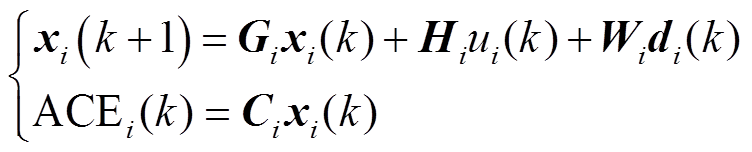 (4)
(4)
式中,Gi、Hi、Wi均为未知矩阵,
 ;
; 为离散采样时刻。
为离散采样时刻。
可以将电力系统的模型表述为
 (5)
(5)
综合来看,电力系统可以视为一个高度复杂的非线性系统。为了设计数据驱动的频率控制器,本文首先将LFC未知离散模型通过动态线性化方法等效为线性数据方程。
由式(5)可得,第 时刻的系统输出
时刻的系统输出 取决于第时刻的
取决于第时刻的 、
、 和负荷扰动,因此将线性离散模型(5)抽象化为
和负荷扰动,因此将线性离散模型(5)抽象化为
 (6)
(6)
式中, 为一个未知的非线性电力系统模型函数;wi(k)为有界扰动,
为一个未知的非线性电力系统模型函数;wi(k)为有界扰动, 。对非线性电力系统线性化之前,首先给出以下两个常规假设。
。对非线性电力系统线性化之前,首先给出以下两个常规假设。
假设1:在任意采样时刻,关于变量的偏导数是连续的。
假设2:对所有 时刻,非线性系统(6)满足广义的Lipschitz条件,即当
时刻,非线性系统(6)满足广义的Lipschitz条件,即当 时,系统满足
时,系统满足
 (7)
(7)
式中, 为一个常数,
为一个常数, 。
。
从电力系统实际的运行情况考虑,上述两个假设是满足的。假设1是一个对非线性函数典型的限制条件,电力系统连续性可以从等效的模型(5)中看出;假设2针对电力系统的输出增量的限制,如果输入信号 是有界的,考虑到负荷扰动的有界性,那么电力系统的输出信号
是有界的,考虑到负荷扰动的有界性,那么电力系统的输出信号 必定是有界的。
必定是有界的。
尽管物理限制和不确定性导致了电力系统的动力学特性是未知的,但是其I/O数据可以量测和储存,并且可以用于控制方案的设计。
定理1:对于满足假设1和假设2的一般非线性电力系统(6),在的时刻,一定存在一个时变的系统参数PPD,使得非线性电力系统模型可等效为动态线性化数据方程,即
 (8)
(8)
式中, 为时变的PPD,并且在任意时刻有界。
为时变的PPD,并且在任意时刻有界。
证明:由式(6)可得
 (9)
(9)
定义
使用假设1和中值定理,可以将式(9)重新表述为
 (10)
(10)
式中, 定义为
定义为 对于的偏导数在
对于的偏导数在 和
和 之间的某个值。
之间的某个值。
在每个采样瞬间,考虑如下数据方程
 (11)
(11)
由于 ,式(11)一定存在一个唯一的解
,式(11)一定存在一个唯一的解 。定义
。定义 ,式(10)便可重新表达为。
,式(10)便可重新表达为。
此外,由于存在Lipschitz常数使得电力系统满足假设2,可得任意时刻有界,即 ,定理1证明完毕。
,定理1证明完毕。
式(8)表明,时变参数PPD中隐含着电力系统不确定因素,其内部十分复杂,无法通过数学表达式精确描述。因此,本文的目标之一是设计某种可靠的估计算法,尽可能使得PPD估计值与实际值之间的估计误差最小。
此外,随着采样时刻趋向于无穷,需设计MFAC控制输入,使得电力系统的实际输出能够跟踪上期望轨迹,达到比较理想的调频效果。
为了设计数据驱动的LFC方案,将动态数据模型(8)写为
 (12)
(12)
考虑如下关于控制输入的准则函数
式中, 为限制控制输入变化量的权重因子;
为限制控制输入变化量的权重因子; 为LFC系统的期望输出。
为LFC系统的期望输出。
将式(12)代入准则函数式(13)中,使用最优条件 ,可得
,可得
 (14)
(14)
式中, 为步长因子,
为步长因子, 。
。
控制算法(14)的实现需要用到PPD的具体数值,但是其数值未知并且不可精确计算。为此,本文提出一种基于RBFNN的PPD在线估计算法,RBFNN的逻辑结构如图2所示,其中包含一个输入层、一个隐含层和一个输出层,其输出量可以表示为
 (15)
(15)
式中, 为时变参数PPD
为时变参数PPD 的估计值;
的估计值; 为网络的权重向量,
为网络的权重向量,
 ;
; 为RBFNN隐含层神经元节点的输出向量,
为RBFNN隐含层神经元节点的输出向量, ,其中第
,其中第 个隐含层输出节点的值为
个隐含层输出节点的值为
 (16)
(16)
式中, 为神经元基函数的宽度;
为神经元基函数的宽度; 为隐含层的中心矢量。输入向量定义为
为隐含层的中心矢量。输入向量定义为 ,其中包含
,其中包含 个系统电力输出数据
个系统电力输出数据 和
和 个控制输入数据
个控制输入数据 。
。 和
和 为两个正整数,代表了网络输入向量中电力系统I/O数据的个数。
为两个正整数,代表了网络输入向量中电力系统I/O数据的个数。
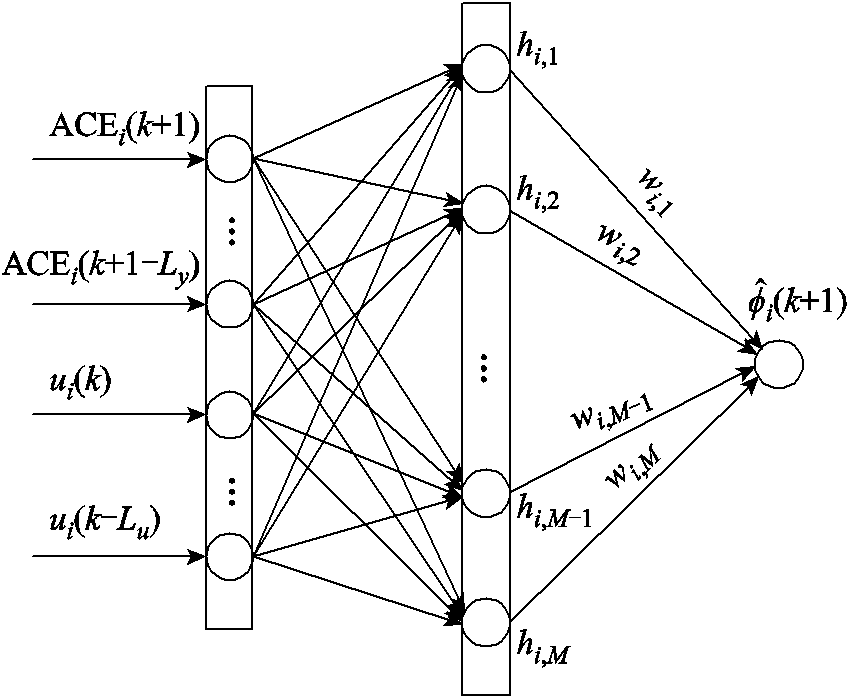
图2 RBF神经网络结构
Fig.2 RBF neural network structure
假设存在一个最优权重向量 ,可以使得
,可以使得
 (17)
(17)
则可以通过最小化输出估计误差 ,找到这个最优权重向量。定义误差准则函数为
,找到这个最优权重向量。定义误差准则函数为
 (18)
(18)
式中, 为电力系统时刻的真实输出;
为电力系统时刻的真实输出; 为RBF神经网络估计输出,定义为
为RBF神经网络估计输出,定义为
 (19)
(19)
考虑准则函数(18),并且使用式(15)和式(16),待更新的参数 、和使用梯度下降法进行在线训练和更新,具体的训练过程如下:
、和使用梯度下降法进行在线训练和更新,具体的训练过程如下:
式(20)~式(22)选取相同的学习速率 ,下标
,下标 为区分互联电力系统中不同控制区域的编号。
为区分互联电力系统中不同控制区域的编号。
参数更新算法为
 (23)
(23)
上述基于RBF神经网络PPD估计算法(16)和控制算法(15)仅利用LFC系统的I/O数据,而不涉及具体的模型结构和参数,同样没有利用诸如联络线交换功率偏差等任何状态变量的信息。因此本文提出的算法为数据驱动的LFC方案,针对区域 的控制方案总结为
的控制方案总结为
 (24)
(24)
 (25)
(25)
 (26)
(26)
式中, 为一个很小的正数,
为一个很小的正数, ;
; 为
为 的初始值;sign为符号函数。
的初始值;sign为符号函数。
引入重置条件(25)是为了保证RBFNN-MFAC算法的稳定性。另外,从实际电力系统控制问题的角度来看,任何控制信号必须有界。由于神经网络的估计输出参与控制器的设计,故对其施加合理的限制,令
 (27)
(27)
式中, 为饱和函数,定义为
为饱和函数,定义为
 (28)
(28)
式中, 和
和 分别为的上、下界。由于PPD是有界的,因此,可以根据的值进行选择,而可以根据采样数据估算出来。又由于重置函数(25)保证了
分别为的上、下界。由于PPD是有界的,因此,可以根据的值进行选择,而可以根据采样数据估算出来。又由于重置函数(25)保证了 ,故可以根据进行选取。
,故可以根据进行选取。
本节从数学角度严格分析算法(式(24)~式(26))的稳定性,首先给出估计过程的收敛性条件定理[21-22]。
定理2:满足假设1和假设2的非线性电力系统(6),如果选取控制区域的学习因子满足收敛条件,那么在任意时刻训练过程是稳定的。收敛条件为
 (29)
(29)
其中
证明:通过使用多元函数的中值定理公式,可以将估计误差 的增量表述为
的增量表述为
式中, 。
。
将式(20)~式(22)代入式(31),其可以重新表述为
 (32)
(32)
将式(30)代入式(32),可以进一步表述为
 (33)
(33)
定义RBFNN估计算法的李雅普诺夫函数为
 (34)
(34)
因此,上述能量函数的增量可以表达为
 (35)
(35)
将式(33)代入式(35)可得

式(36)表明,随着时间的推移,能量函数逐渐减小,也就是说估计误差最终会收敛到零,RBFNN估计系统是稳定的,证明完毕。
定理2证明了RBF神经网络训练过程是稳定的,实际电力系统闭环回路的稳定性仍需要进一步分析。首先给出以下必要假设:
假设3:对于任意 的时刻
的时刻 ,电力系统的
,电力系统的 符号不变,即满足
符号不变,即满足 或
或 。本文讨论
。本文讨论 的情况。
的情况。
假设3的物理意义在于:当互联电力系统的实际输入信号增加时,其对应的输出信号 应该是不减小,由式(5)可以看出电力系统满足这种“拟线性”特征。
应该是不减小,由式(5)可以看出电力系统满足这种“拟线性”特征。
为了确保频率偏差和联络线交换功率变化量始终处在允许的设定范围内,设定信号的期望轨迹为 。
。
定理3:对于本文提出的RBFNN-MFAC算法(式(24)~式(26)),如果选取算法参数时满足 和
和 ,那么闭环电力系统区域实际输出一定可以跟踪上期望信号
,那么闭环电力系统区域实际输出一定可以跟踪上期望信号 ,即
,即
 (37)
(37)
式中, 为跟踪误差。
为跟踪误差。
证明:首先,定义闭环电力系统的李雅普诺夫函数为
 (38)
(38)
由式(8)可得
令
 (40)
(40)
定理3保证了PPD估计值 ,假设3保证
,假设3保证 ,那么一定存在一个常数
,那么一定存在一个常数 满足
满足
 (41)
(41)
利用二次方和不等式 ,以及定理3的条件,一定存在常数
,以及定理3的条件,一定存在常数 使得式(42)成立。
使得式(42)成立。
 (42)
(42)
因此,闭环电力系统的李雅普诺夫函数增量可以表述为
随着运行时间的增加,函数 是逐渐减小的。并且最终当
是逐渐减小的。并且最终当 时,
时, ,意味着跟踪误差
,意味着跟踪误差 最终会收敛到零,证明完毕。
最终会收敛到零,证明完毕。
本文方法和文献[11]提出的数据驱动LFC方案的主要区别在于:①文献[11]的方法是迭代优化算法,本文方法为在线控制算法;②文献[11]需要在电力系统中采集两次闭环实验数据进行梯度估计,本文并不需要实验过程;③本文方法仅利用电力系统的I/O信息设计数据驱动的LFC方案,没有使用任何模型信息和状态变量。
本节不失一般性地选用三区域互联LFC模型进行测试,以验证所提算法在负荷扰动作用下的调频性能,图3为三区域仿真电力系统模型框图。模型参数[8]数值选取见表2,其中联络线系数选为
值得说明的是,电力系统的模型和参数在本文设计过程中均假设未知,表1中给出仿真参数仅为产生I/O数据,用以测试本文算法的调频性能,并不决定控制器的结构和增益。
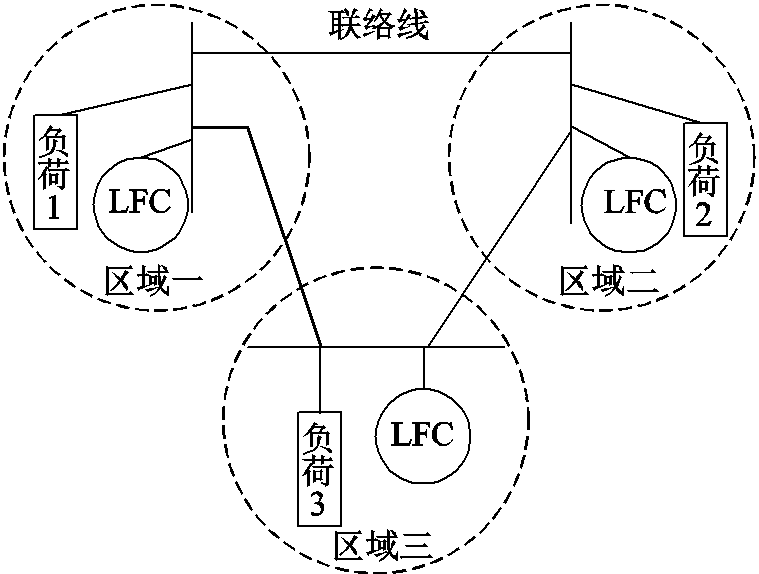
图3 三区域互联电力系统
Fig.3 Three-area interconnected power system
表2 电力系统仿真参数
Tab.2 Simulation parameters of power system
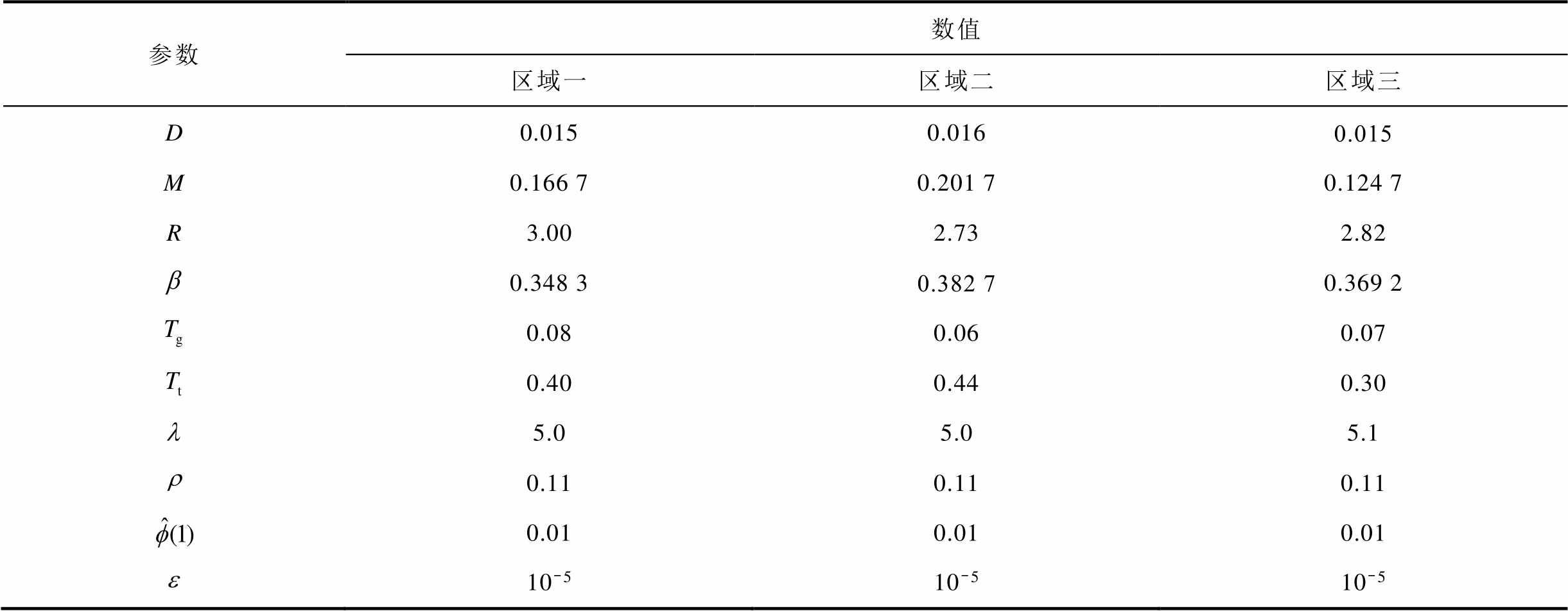
参数数值 区域一区域二区域三 D0.0150.0160.015 M0.166 70.201 70.124 7 R3.002.732.82 0.348 30.382 70.369 2 0.080.060.07 0.400.440.30 5.05.05.1 0.110.110.11 0.010.010.01 10-510-510-5
本节测试算法在常负荷扰动作用下的控制性能。RBFNN选用4-4-1的网络结构,即 ,
, 。初始参数均随机选取,三个不同控制区域的学习速率均取
。初始参数均随机选取,三个不同控制区域的学习速率均取 ;电力系统仿真参数见表1,总仿真时间选为60s,采样时间为0.001s。
;电力系统仿真参数见表1,总仿真时间选为60s,采样时间为0.001s。
假设在5s时三个控制区域同时受到0.02(pu)的负荷扰动。频率波动和联络线偏差的输出曲线如图4所示。仿真数据表明,本文算法能够很好地处理负荷扰动带来的频率波动问题,显示了理论分析的正确性和本文算法的有效性。
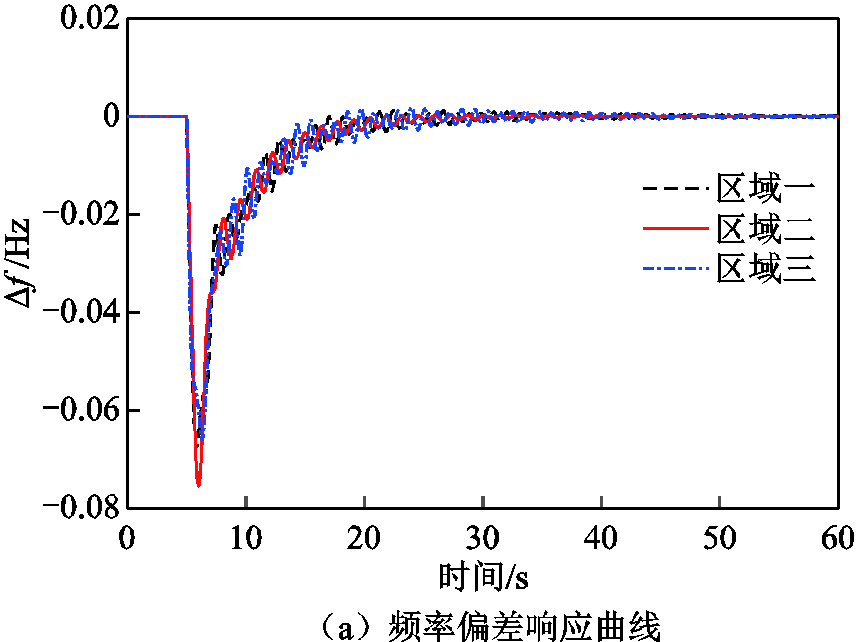
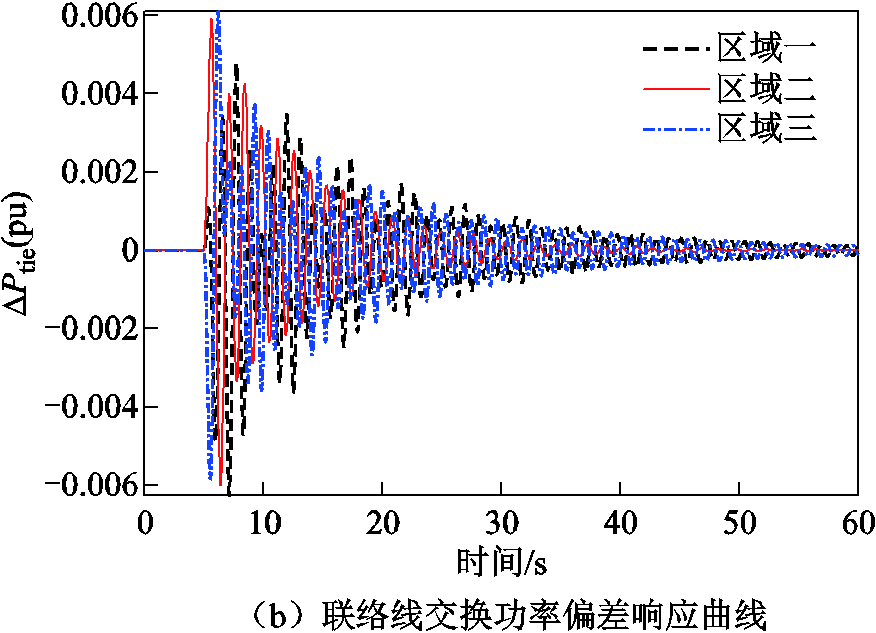
图4 常负荷扰动下响应曲线
Fig.4 Response curves under constant load disturbance
接下来将本文提出的LFC算法与经典MFAC算法[15]、神经元MFAC算法[20]和基于迭代反馈整定(Iterative Feedback Tuning, IFT)优化方案的PI算法的控制性能进行比较,比较结果如图5所示。仿真数据显示本文提出的算法在控制性能上与IFT算法相差无几,并且优于神经元MFAC和经典MFAC控制算法。值得指出的是,IFT算法需要在闭环电力系统中做两次实验进行梯度估计,并且需要迭代收敛的过程,会带来比较繁重的计算负担。而本文算法在性能上与其相仿,但不需要闭环实验和迭代过程,大大降低了控制器的计算量。此外,不同于文献[20],本文LFC方案使用电力系统的I/O信号作为RBF神经网络的输入数据,直接估计未知的系统参数PPD。仿真对比结果亦显示了本文算法的良好改进效果。
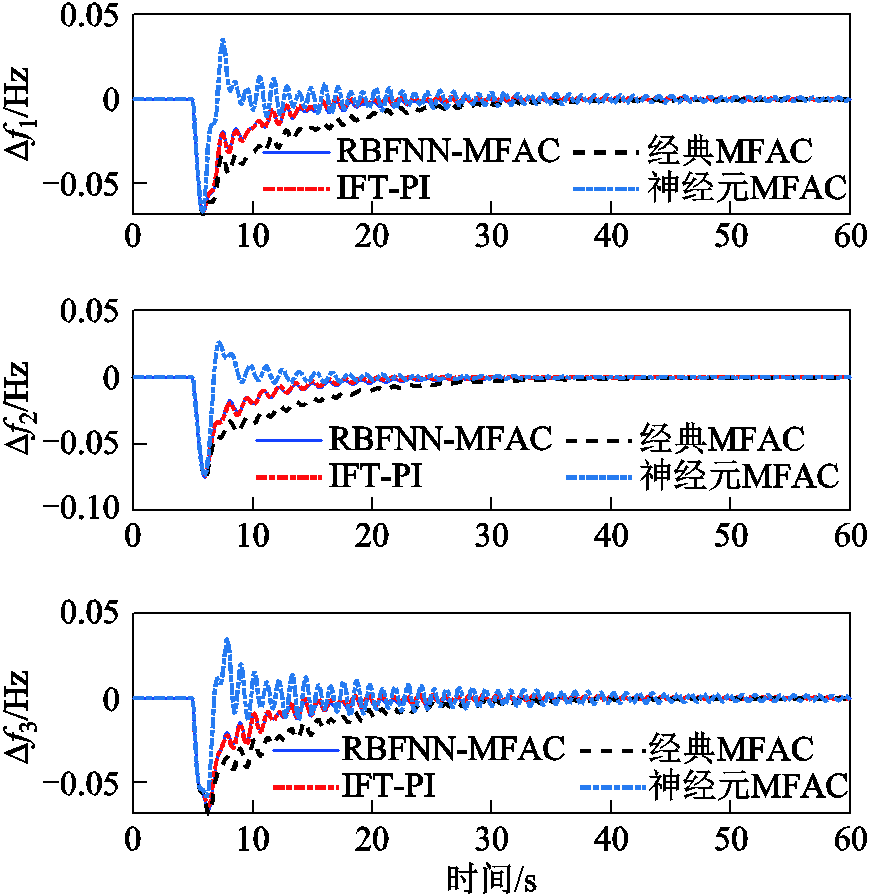
图5 常负荷扰动下 对比曲线
对比曲线
Fig.5 Compared curves ofunder constant load disturbance
本节测试改进的MFAC算法在变负荷扰动下的控制性能。图6为变负荷扰动下的频率偏差和联络线功率偏差曲线,负荷扰动变化如图7所示。可以看出在变负荷扰动的干扰下,本文算法仍然具有良好的调频作用,能够将联络线偏差控制在设定范围内,并且调节时间较快,控制效果理想。
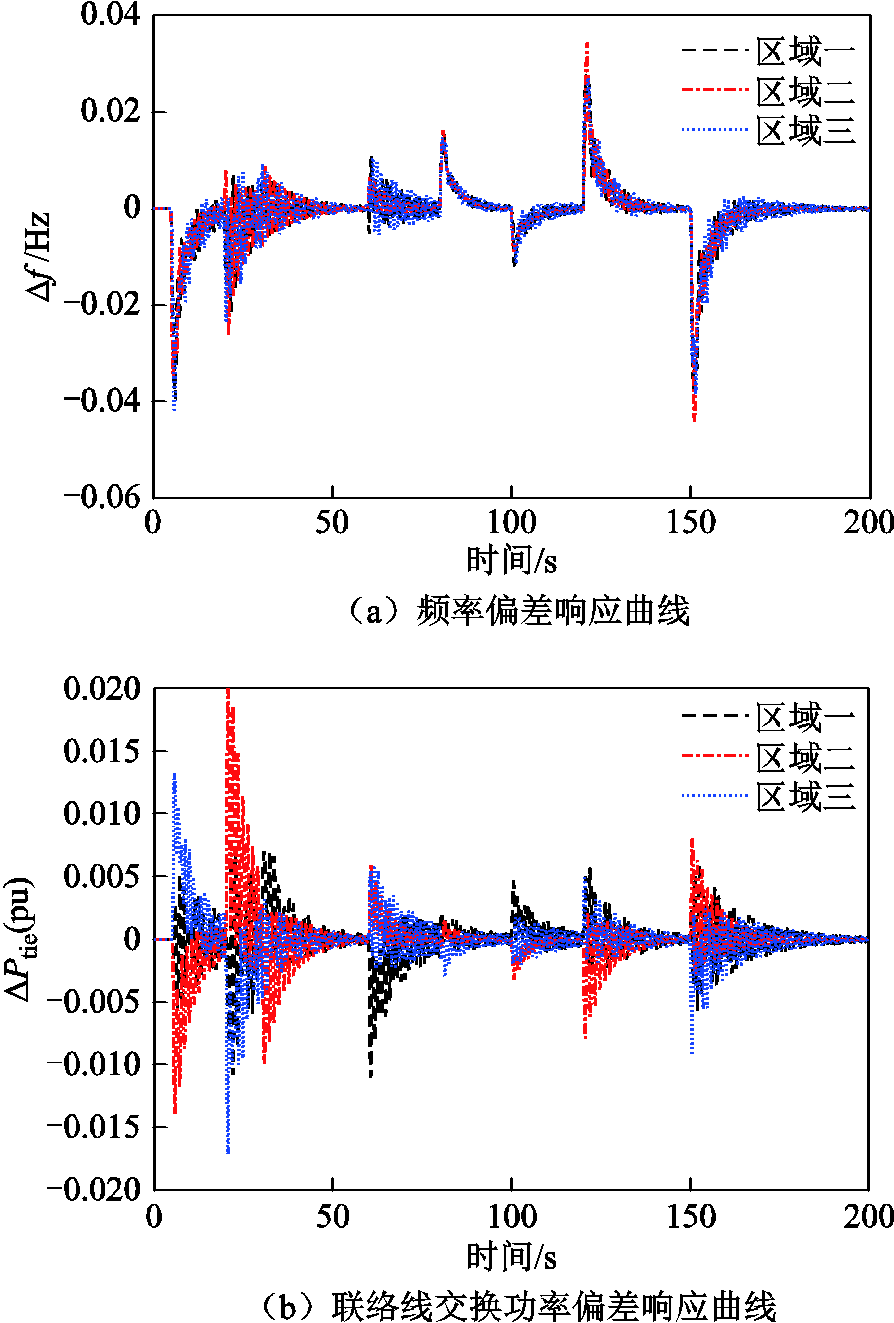
图6 变负荷扰动下响应曲线
Fig.6 Response curves under changed load disturbance
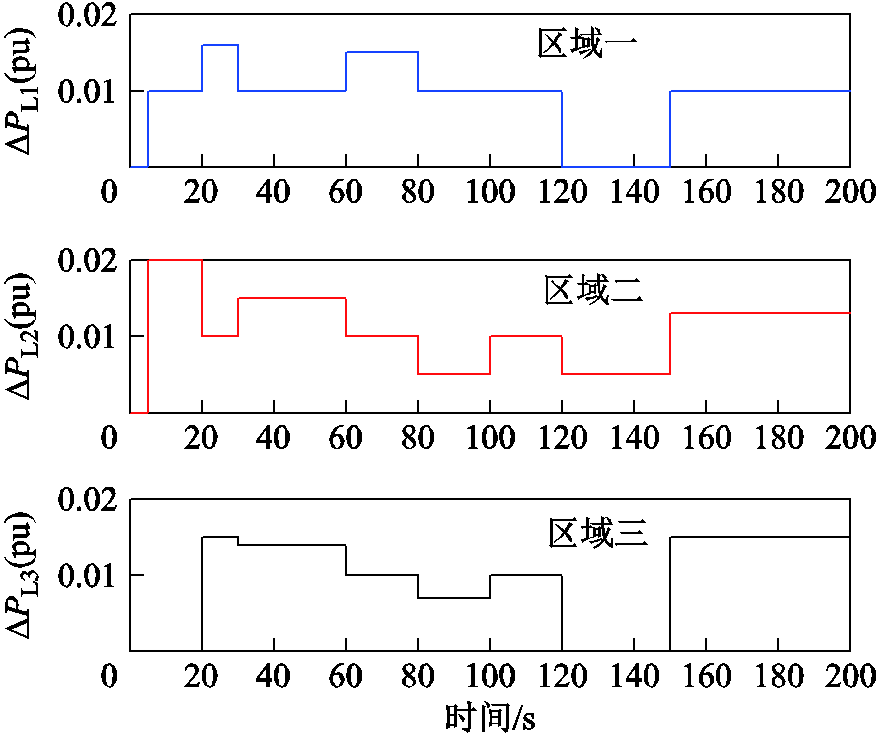
图7 负荷扰动变化
Fig.7 Changed trajectory of load disturbance
不同算法的频率偏差控制效果对比如图8所示。相较于经典MFAC和文献[20]改进的神经元MFAC算法,本文方案依然可以兼顾超调量和调节时间的要求,变负荷仿真同样印证了本文算法具有良好的动态性能。
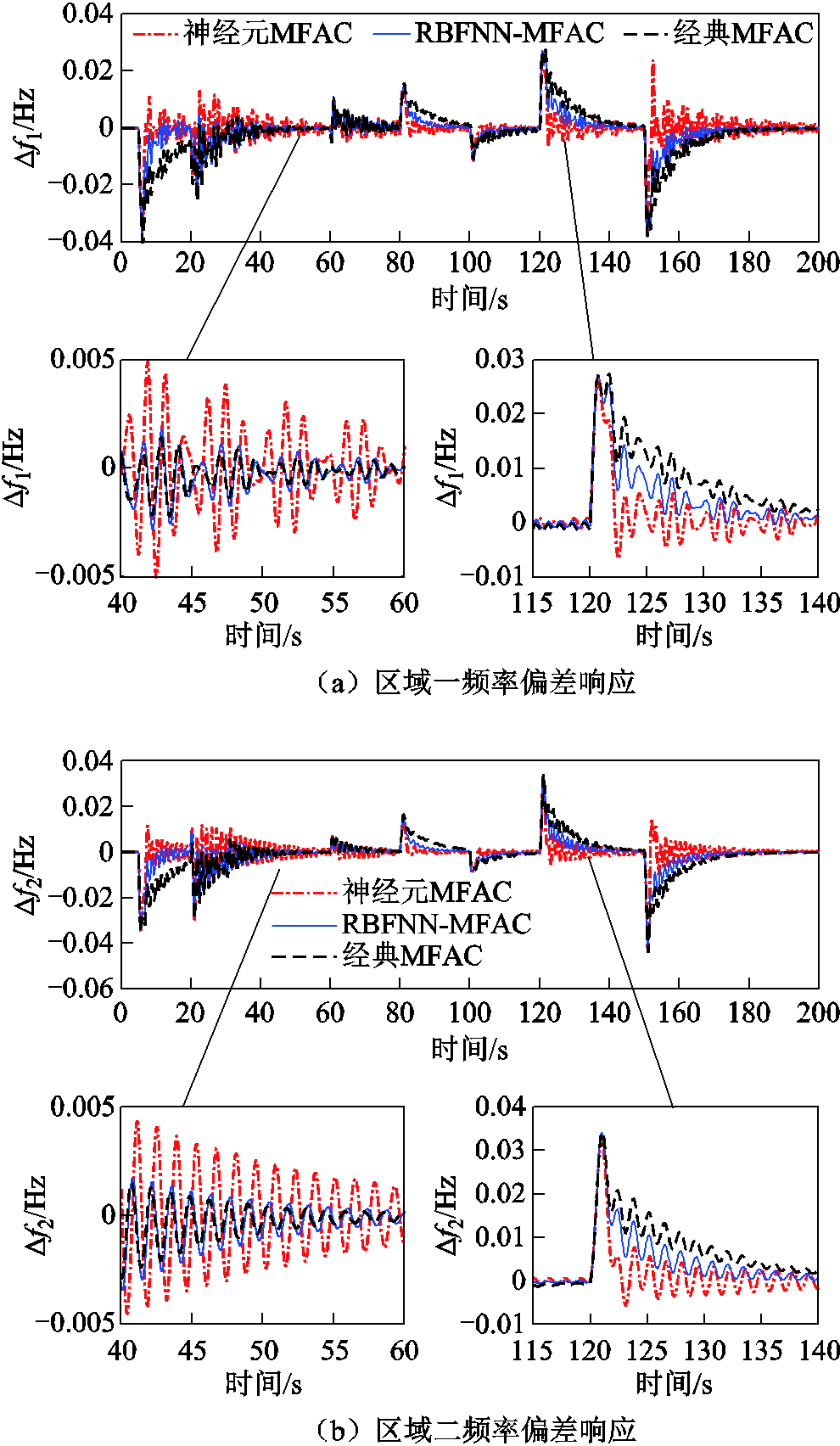
图8 变负荷扰动下对比曲线
Fig.8 Compared curves under changed load disturbance
为了能够全面测试本文算法的有效性,本节考虑含有死区、调速器出力限制和测量噪声的电力系统。其中死区阈值设置为0.016Hz,调速器出力限制设置为0.021(pu),噪声幅值为 Hz。
Hz。
常负荷扰动下的频率偏差响应曲线如图9所示。对比图4a中的线性系统的仿真数据,图9中曲线显示物理限制会影响本文算法的调节时间等动态性能,但是在25s后,RBFNN-MFAC算法能够将频率偏差收敛到 Hz的区域内,并不会影响算法的收敛性。
Hz的区域内,并不会影响算法的收敛性。
四种算法的频率偏差对比如图10所示。结果显示,IFT算法不能够很好地应对物理限制因素对调频性能的影响,频率波动较大,而本文提出的LFC策略能够兼顾调节时间和超调量的要求,达到比较理想的调频效果。综合图5和图10的对比数据来看,本文算法的调频性能优于IFT、经典MFAC和神经元MFAC,再一次印证了本文算法具有良好的控制效果和调频性能。
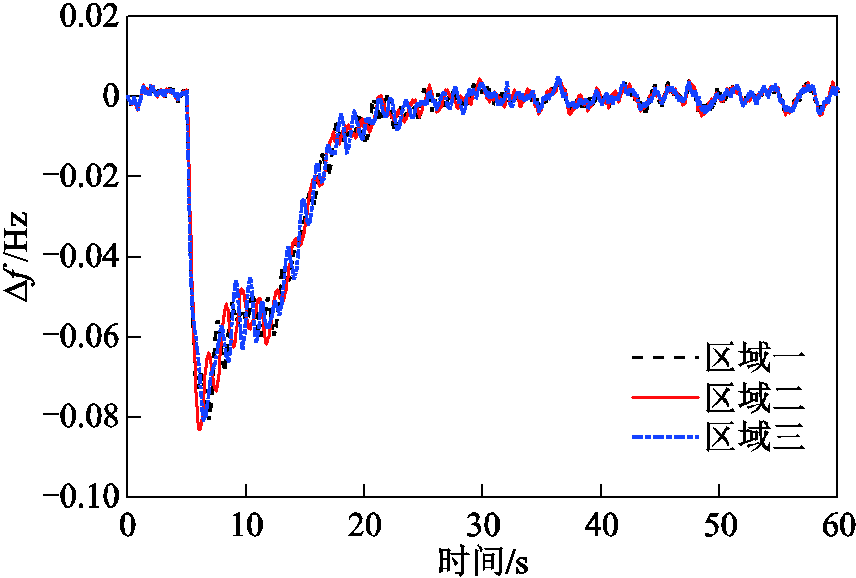
图9 非线性电力系统响应曲线
Fig.9 Response curves of nonlinear power system
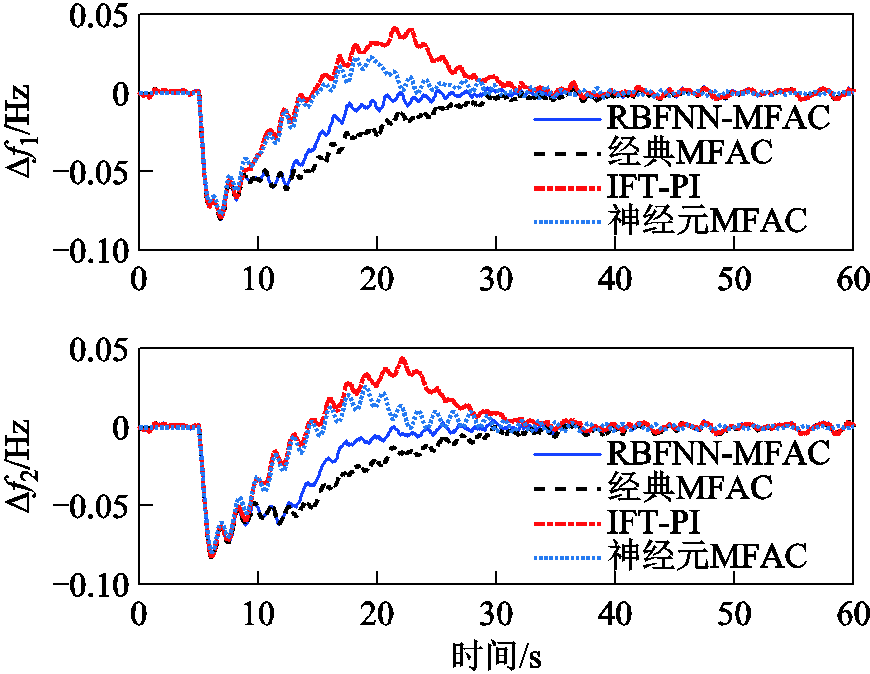
图10 非线性电力系统对比曲线
Fig.10 Compared curves of nonlinear power system
针对互联电力系统,本文基于RBF神经网络和MFAC算法提出了一种数据驱动LFC策略。该方法弱化了控制器设计对电力系统精确模型的依赖,仅利用其输入输出数据实现负荷频率控制算法的设计。首先引入时变参数PPD,将未知的电力系统等效为一个动态数据模型,并且使用RBF神经网络对未知的PPD进行在线估计。基于此数据模型,设计了数据驱动的RBFNN-MFAC调频方法,使用李雅普诺夫稳定理论对闭环控制系统和PPD估计过程进行严格的收敛性分析。最后在三区域互联电力系统测试算法的实用性和有效性,仿真信息显示本文提出的LFC方法具有良好的控制性能,能够解决复杂的扰动变化带来的频率波动问题,证实了本文算法的有效性。
参考文献
[1] 李军徽, 侯涛, 穆钢, 等. 电力市场环境下考虑风电调度和调频极限的储能优化控制[J]. 电工技术学报, 2021, 36(9): 1791-1804.
Li Junhui, Hou Tao, Mu Gang, et al. Optimal control strategy for energy storage considering wind farm scheduling plan and modulation frequency limitation under electricity market environment[J]. Transactions of China Electrotechnical Society, 2021, 36(9): 1791-1804.
[2] 颜湘武, 崔森, 常文斐. 考虑储能自适应调节的双馈感应发电机一次调频控制策略[J]. 电工技术学报, 2021, 36(5): 1027-1039.
Yan Xiangwu, Cui Sen, Chang Wenfei. Primary frequency regulation control strategy of doubly-fed induction generator considering supercapacitor SOC feedback adaptive adjustment[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 1027-1039.
[3] Liao Kai, Xu Yan. A robust load frequency control scheme for power systems based on second-order sliding mode and extended disturbance observer[J]. IEEE Transactions on Industrial Informatics, 2018, 14(7): 3076-3086.
[4] Yan Shen, Gu Zhou, Park J H. Memory-event-triggered ![]() load frequency control of multi-area power systems with cyber-attacks and communication delays[J]. IEEE Transactions on Network Science and Engineering, 2021, 8(2): 1571-1583.
load frequency control of multi-area power systems with cyber-attacks and communication delays[J]. IEEE Transactions on Network Science and Engineering, 2021, 8(2): 1571-1583.
[5] 杨丽, 孙元章, 徐箭, 等. 基于在线强化学习的风电系统自适应负荷频率控制[J]. 电力系统自动化, 2020, 44(12): 74-83.
Yang Li, Sun Yuanzhang, Xu Jian, et al. Adaptive load frequency control of wind power system based on online reinforcement learning[J]. Automation of Electric Power Systems, 2020, 44(12): 74-83.
[6] 吕永青, 窦晓波, 杨冬梅, 等. 含荷电状态修正和通信延迟的储能电站负荷频率鲁棒控制[J]. 电力系统自动化, 2021, 45(10): 59-67.
Lü Yongqing, Dou Xiaobo, Yang Dongmei, et al. Load-frequency robust control for energy storage power station considering correction of state of charge and communication delay[J]. Automation of Electric Power Systems, 2021, 45(10): 59-67.
[7] 左剑, 谢平平, 李银红, 等. 基于智能优化算法的互联电网负荷频率控制器设计及其控制性能分析[J]. 电工技术学报, 2018, 33(3): 478-489.
Zuo Jian, Xie Pingping, Li Yinhong, et al. Intelligent optimization algorithm based load frequency controller design and its control performance assessment in interconnected power grids[J]. Transactions of China Electrotechnical Society, 2018, 33(3): 478-489.
[8] Bevrani H. Robust power system frequency control[M]. New York: Springer, 2009.
[9] Zhang He, Liu Jun, Xu Shengyuan. H-infinity load frequency control of networked power systems via an event-triggered scheme[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 7104-7113.
[10] 侯庆春, 杜尔顺, 田旭, 等. 数据驱动的电力系统运行方式分析[J]. 中国电机工程学报, 2021, 41(1): 1-12, 393.
Hou Qingchun, Du Ershun, Tian Xu, et al. Data-driven power system operation mode analysis[J]. Proceedings of the CSEE, 2021, 41(1): 1-12, 393.
[11] Dong Na, Han Xueshuo, Gao Zhongke, et al. SPSA-based data-driven control strategy for load frequency control of power systems[J]. IET Generation, Transmission and Distribution, 2018, 12(2): 414-422.
[12] Yan Ziming, Xu Yan. A multi-agent deep reinforcement learning method for cooperative load frequency control of a multi-area power system[J]. IEEE Transactions on Power Systems, 2020, 35(6): 4599-4608.
[13] Yan Ziming, Xu Yan. Data-driven load frequency control for stochastic power systems: a deep reinforcement learning method with continuous action search[J]. IEEE Transactions on Power Systems, 2019, 34(2): 1653-1656.
[14] 黄伟峰, 姚建刚, 韦亦龙, 等. 无模型自适应控制算法在互联电网AGC中的应用[J]. 电力系统及其自动化学报, 2016, 28(4): 78-84.
Huang Weifeng, Yao Jiangang, Wei Yilong, et al. Application of model-free adaptive control algorithm into AGC control of interconnected power grid[J]. Proceedings of the CSU-EPSA, 2016, 28(4): 78-84.
[15] Asadi Y, Farsangi M M, Bijami E, et al. Data-driven adaptive control of wide-area non-linear systems with input and output saturation: a power system application[J]. International Journal of Electrical Power and Energy Systems, 2021, 133: 107225.
[16] Xu Dezhi, Jiang Bin, Shi Peng. A novel model-free adaptive control design for multivariable industrial processes[J]. IEEE Transactions on Industrial Electronics, 2014, 61(11): 6391-6398.
[17] Xu Dezhi, Jiang Bin, Shi Peng. Adaptive observer based data-driven control for nonlinear discrete-time processes[J]. IEEE Transactions on Automation Science and Engineering, 2014, 11(4): 1037-1045.
[18] 王天鹤, 赵希梅, 金鸿雁. 基于递归径向基神经网络的永磁直线同步电机智能二阶滑模控制[J]. 电工技术学报, 2021, 36(6): 1229-1237.
Wang Tianhe, Zhao Ximei, Jin Hongyan. Intelligent second-order sliding mode control based on recurrent radial basis function neural network for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1229-1237.
[19] 付东学, 赵希梅. 基于径向基函数神经网络的永磁直线同步电机反推终端滑模控制[J]. 电工技术学报, 2020, 35(12): 2545-2553.
Fu Dongxue, Zhao Ximei. Backstepping terminal sliding mode control based on radial basis function neural network for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2020, 35(12): 2545-2553.
[20] Su Chengli, Liu Bin, Zhang Guanghui, et al. Application of RBF neural network in the model-free adaptive control[C]//Proceedings of the 2011 Chinese Control and Decision Conference, Mianyang, 2011: 3322-3325.
[21] Yu Qiongxia, Hou Zhongsheng, Bu Xuhui, et al. RBFNN-based data-driven predictive iterative learning control for nonaffine nonlinear systems[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(4): 1170-1182.
[22] Zhu Yuanming, Hou Zhongsheng, Qian Feng, et al. Dual RBFNNs-based model-free adaptive control with aspen HYSYS simulation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(3): 759-765.
Neural Network Based Data-Driven Load Frequency Control for Interconnected Power Systems
Abstract To the problems of modeling errors and uncertainties in highly complex power systems, a load frequency control (LFC) strategy was proposed in this paper without using any model information of power system based on model-free adaptive control (MFAC) algorithm. First, the dynamic model of the power system was abstracted as a general nonlinear function. By introducing a time-varying pseudo partial derivative (PPD) between historical I/O data, the nonlinear power system was equivalent to a dynamic linear data model. Secondly, an RBF neural network was constructed to estimate the PPD of the system online, and the optimization theory was used to design the data-driven LFC scheme. In theory, the stability of the closed-loop power system and the convergence of the RBF neural network estimation method were strictly analyzed. Finally, it is verified on the interconnected power system that the LFC method in this paper can achieve good tracking performance without using model information.
keywords:Interconnected power system, load frequency control, model-free adaptive control, radial basis function (RBF) neural network, data driven control
DOI:10.19595/j.cnki.1000-6753.tces.211208
中图分类号:TM732; TP273
国家自然科学基金(61573130, U1804147)、河南省高校科技创新团队(20IRTSTHN019)、河南理工大学创新型科技团队项目(T2019-2, T2017-1)和河南省创新型科技团队项目(CXTD2016054)资助。
收稿日期 2021-08-04
改稿日期 2021-10-22
陈宗遥 男,1998年生,硕士研究生,研究方向为电力系统的数据驱动控制。E-mail:1556771859@qq.com
卜旭辉 男,1981年生,教授,博士生导师,研究方向为数据驱动控制,电力系统运行控制,网络化控制。E-mail:buxuhui@gmail.com(通信作者)
(编辑 赫蕾)