
图1 形状记忆合金发展历程
Fig.1 Development history of shape memory alloy
摘要 智能材料家族中的形状记忆合金(SMA)具有独特的形状记忆效应、超弹性、高阻尼、自感知和生物相容等特性。形状记忆合金执行器(SMAA)具有高功重比、高应变应力、高驱动频率和高设计自由度等特点,目前在航空航天、机器人、生物医疗、汽车自动化和信息电子领域已经开展了相关的理论研究和应用设计工作。基于SMAA的新型现代驱动技术与传统基于电磁、气动和液压原理的技术相比,在某些领域和应用场景下具有高功率密度、高精度和低成本的优势,因此SMAA工程应用前景和潜力较大,然而SMAA的本体设计、系统建模和控制涉及多学科的理论分析和设计思想,目前还没有发展出综合性的设计理论,因此该文总结归纳和分析了SMAA理论研究和应用发展的现状和趋势,进一步探索了SMAA综合设计理论,为SMAA今后发展综合设计理论提供参考,并为SMAA相关领域的科研人员提供理论研究和实际应用的参考。
关键词:形状记忆合金执行器 理论研究 应用研究 设计理论 关键问题
先进材料技术作为高新科技的核心之一,是国家核心竞争力的体现[1]。第四代材料中智能材料是现代高新技术新材料研究发展中最活跃和最先进的方向,其不仅促进功能材料和结构材料的融合发展,而且能够促进智能化机电设备研究应用的发展[2-3]。
智能材料通常指具有感知、驱动、响应、诊断、修复或适应特性的材料,主要包括形状记忆材料、压电材料、磁致伸缩材料、电致伸缩材料和智能高分子材料等[4-5]。形状记忆合金(Shape Memory Alloy, SMA)属于形状记忆材料中金属类,它具有在特定的外界激励条件下如热或磁激励的情况下记忆或者保留原来形状的能力。选用智能材料作为驱动材料时,SMA与其他类型智能材料相比,驱动应力、驱动应变、驱动频率、能量密度和功重比等关键性能指标均较高[6-7],适合高功率密度、高功重比、高驱动力和大行程执行器的应用场景。
形状记忆合金执行器(Shape Memory Alloy Actuator, SMAA)与传统基于电磁、气动和液压原理的执行器相比,结构简单、功重比大、无噪声(电磁噪声),同时具有自感知功能、低压驱动、轻量化、小型化、结构多样化等特点[8-10]。经过学界和工业界多年的探索和应用,目前在某些特殊领域已经得到应用,SMAA不仅能够在功能上替代和性能上超越传统执行器,而且可以有效降低执行器的制造和使用成本,尤其是在高功重比、轻量小型化执行器的应用领域。。
SMAA具有广阔的应用前景,如在航空航天、机器人、生物医疗、汽车自动化和信息电子领域内具有特殊需求的场合。尽管目前国内外有很多以SMAA作为执行器的机电结构,文章发表和专利申请数量逐年递增,各国也相继开展了大量的立项研究工作,但真正能够应用于实际系统中的设计却十分有限,不能完全发挥SMAA的优良特性,主要原因是SMAA的理论和应用涉及多学科的理论分析和综合设计,因此目前还没有发展出一套完整的综合设计理论,对SMAA理论、结构、驱动控制和实际应用中的研究和探索仍有不足。
本文为了提供给今后针对SMAA研究全面的理论研究和应用设计参考,初步探索了SMAA综合设计理论,总结归纳和深入分析了SMAA的发展历程、基本特性、理论研究现状、应用研究现状、亟需解决的关键问题以及未来发展方向等方面的研究现状和未来展望。
SMA的发展历程主要可以分为四个阶段,如图1所示,第1阶段在20世纪30~50年代,1932年瑞典化学家A. Olande首次发现SMA金属相变引起材料宏观特性变化的现象[11],L. C. Chang等在1945年发现了AuCd类合金在马氏体状态下发生形变后,在加热到高温情况下能够恢复原来的形状[12]。第2阶段在20世纪50~70年代,1962年,美国海军军械实验室W. J. Buehler等发现了NiTi合金具有良好的形状记忆特性,并研发出成本较低和性能较好的Nitinol系列SMA产品,随后工程技术人员开始在航空航天领域利用SMA的特殊特性设计了新型的应用[13-15]。第3阶段在20世纪70~90年代,随着SMA的性能进一步提高,工程应用出现了爆炸性的增长[16-17]。第4阶段在20世纪90年代~21世纪20年代,SMA的基础理论研究飞速发展,科研人员和工程师针对SMA在航空航天、军事、机器人、民用消费产品、生物医疗领域进行了深入研究和广泛应用[18-20]。目前,SMA材料主要有铁基、铜基和NiTi基材料,尽管铁基和铜基SMA具有价格优势,如FeMnSi、CuZnAl和CuAlNi,但其稳定性、工程实用性和热力学性能均较差,因此目前绝大多数实际应用中均采用基于NiTi基材料的SMA,后文主要针对NiTi基SMA进行研究[21]。目前,生产热控型SMA的公司主要有美国Dynalloy、英国Memry Corporation和日本Toki Corporation,国内的生产公司主要有江阴佩尔科技、兰州西脉股份有限公司和有研亿金有限公司。
图1 形状记忆合金发展历程
Fig.1 Development history of shape memory alloy
SMA根据外加的激励条件不同,主要分为磁控型SMA和热控型SMA,磁控型SMA由于发现较晚,通常所提到的SMA均指热控型SMA。磁控型SMA虽然具有较高的驱动频率,但需要体积和质量较大且复杂的磁场驱动控制设备,而且受磁场、温度和应力的影响,控制比较复杂,材料制备困难,价格较高,不方便工程应用,限制了磁控型SMA的应用场景[22-23];而热控型SMA可以通过电流产生焦耳热的方式来控制,通电加热的同时SMA本身的电阻变化可作为反馈量,避免了采用复杂的磁场控制设备和传感器,提高了功率密度和集成度,进一步使执行器从原来的控制器、执行器和传感器的组合转变为控制器和传感执行集成的智能化执行机构,因此目前工程上常选用热控型SMA作为驱动元件,后文中将主要讨论热控型SMA[24-25]。
形状记忆合金具有的形状记忆效应和超弹性等特性都是由其内部微观固态相变机制引起的,SMA微观晶体结构如图2所示,形状记忆合金在不同温度情况下具有两种不同的固态相,在高温状态下主要为奥氏体相,为立方晶体结构,在低温情况下主要为马氏体相,为单斜晶体心立方晶体结构,在低应力情况下主要为孪晶马氏体,高应力情况下主要为非孪晶马氏体[26]。图中,Mt为孪晶马氏体,Md为非孪晶马氏体。

图2 SMA微观晶体结构
Fig.2 SMA microscopic crystal structure
SMA的温度-应力-应变相变过程如图3所示,图中,A为奥氏体,Ms为马氏体相变开始温度,Mf为马氏体相变结束温度,As为奥氏体相变开始温度,Af为奥氏体相变结束温度,Md为奥氏体不受应力影响的最高温度, 和
和 分别为应力诱发Mt向Md转变的开始和结束的应力。SMA会在三种相之间发生相变,共有三类五种相变:Mt↔A,Md↔A,Mt→Md。
分别为应力诱发Mt向Md转变的开始和结束的应力。SMA会在三种相之间发生相变,共有三类五种相变:Mt↔A,Md↔A,Mt→Md。
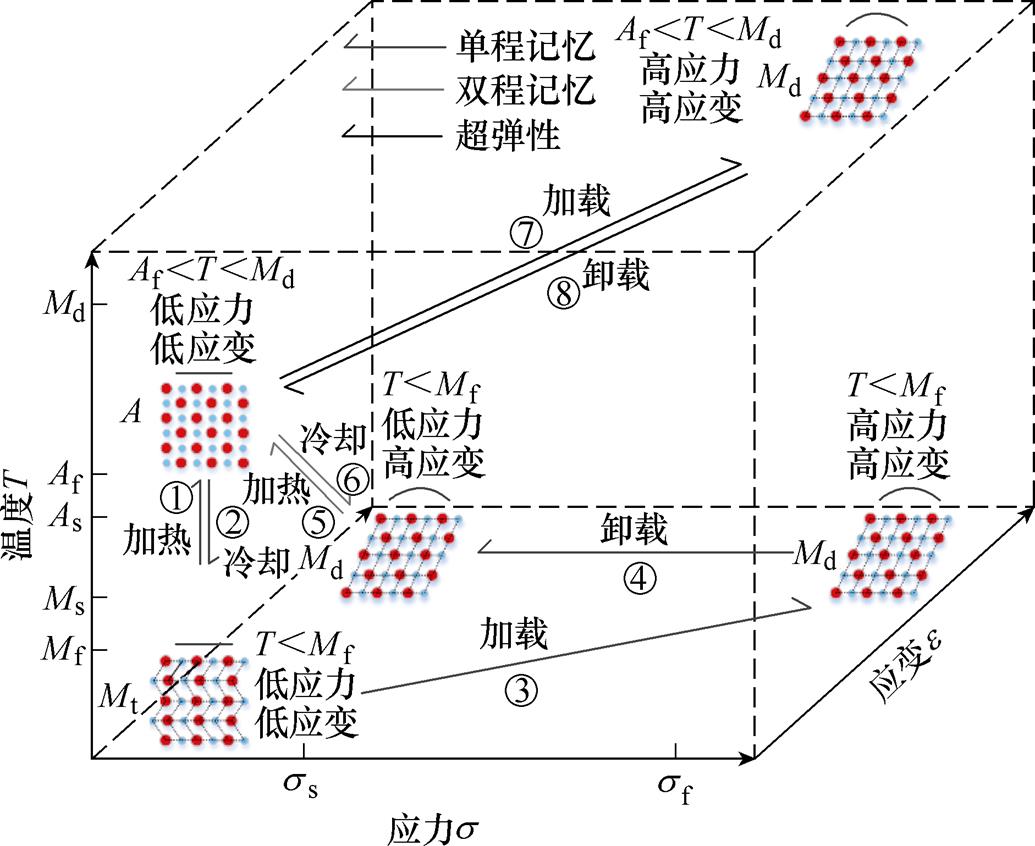
图3 SMA相变过程
Fig.3 SMA phase transition
形状记忆效应的相变过程如①~⑥所示,超弹性的相变过程如⑦、⑧所示,其中形状记忆效应在低应力情况下表现为Mt↔A,温度低于Mf为孪晶马氏体,温度高于Af为奥氏体,此时因应力较小,应变回复也较小。形状记忆效应在高应力情况下,主要表现为Md↔A,温度低于Mf为非孪晶马氏体,温度高于Af为奥氏体,高应力情况下,应变回复也较大,工程上主要利用在高应力情况下高应变的回复能力。通过在Mt情况下施加较大应力,表现为Mt→Md,此种相变为不可逆相变。超弹性或称伪弹性是在温度高于Af的情况下,通过外力作用使其在弹性应变极限范围内产生变形,当外力去除时,SMA回复到原来形状的能力[27-28]。
根据智能材料的性能差异,主要分为传感器用智能材料和驱动器用智能材料,用于驱动器的智能材料主要关注其驱动应力、应变、频率和能量密度等性能指标[29],图4和图5为目前常用智能材料的关键指标对比,从图中可以看出,热控型SMA的驱动应力最大,工程上常用的磁或电致伸缩材料和压电材料驱动应力也较高,但其驱动应变非常低,通常只能应用于微小位移驱动器中,如果需要较大位移的驱动,需要增加位移放大装置,如超声波电机,压电材料在超声波频段产生微观机械振动,通过定子和转子之间的摩擦作用,将微观振动转换成宏观的单方向转动或直线运动,常应用到相机的对焦马达,虽然超声波电机具有响应快、无磁场干扰和噪声小等优势,但其需要高压驱动、装置复杂、摩擦损耗大、输出功率低和寿命低的缺点限制了它的应用场景[30-31]。SMA在具有高应力和应变特点的同时还有较高的功重比,驱动频率为30Hz左右,在所有智能材料中驱动频率处于中等水平,综上所述,在现有智能材料中,SMA能量密度最高,同时也具有相对较高的驱动应力、应变和频率,综合性能突出,因此SMA非常适合作为执行器材料。
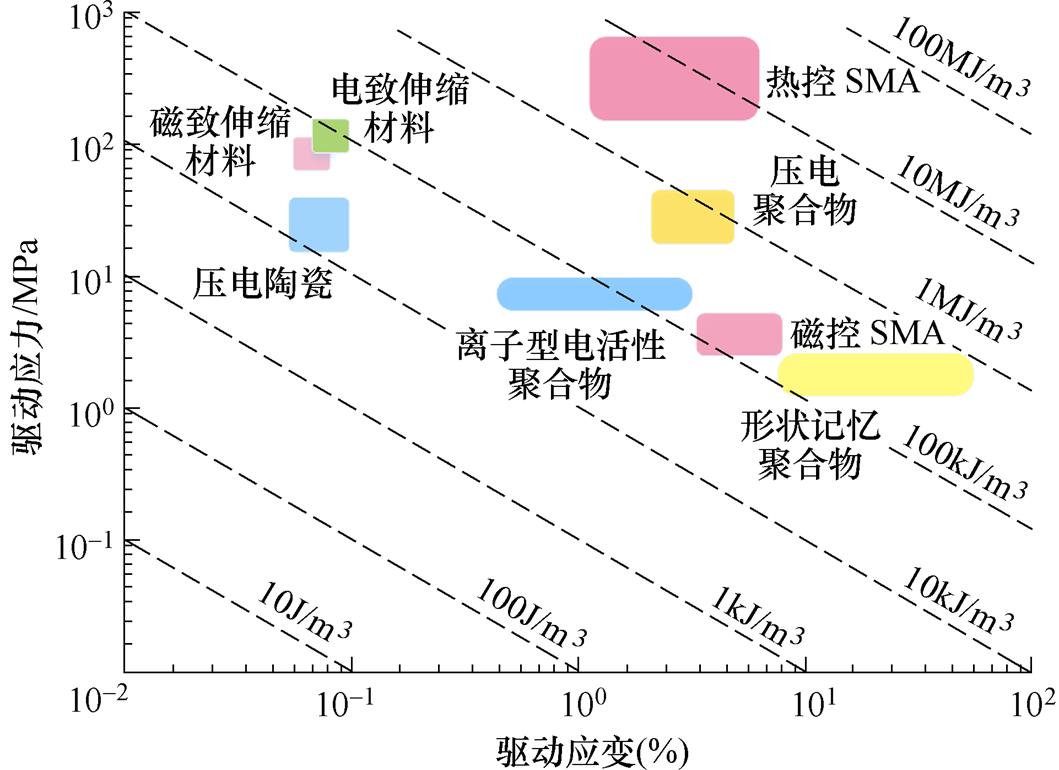
图4 智能材料驱动应力-应变和能量密度对比
Fig.4 Comparison of smart materials drive stress-strain and energy density
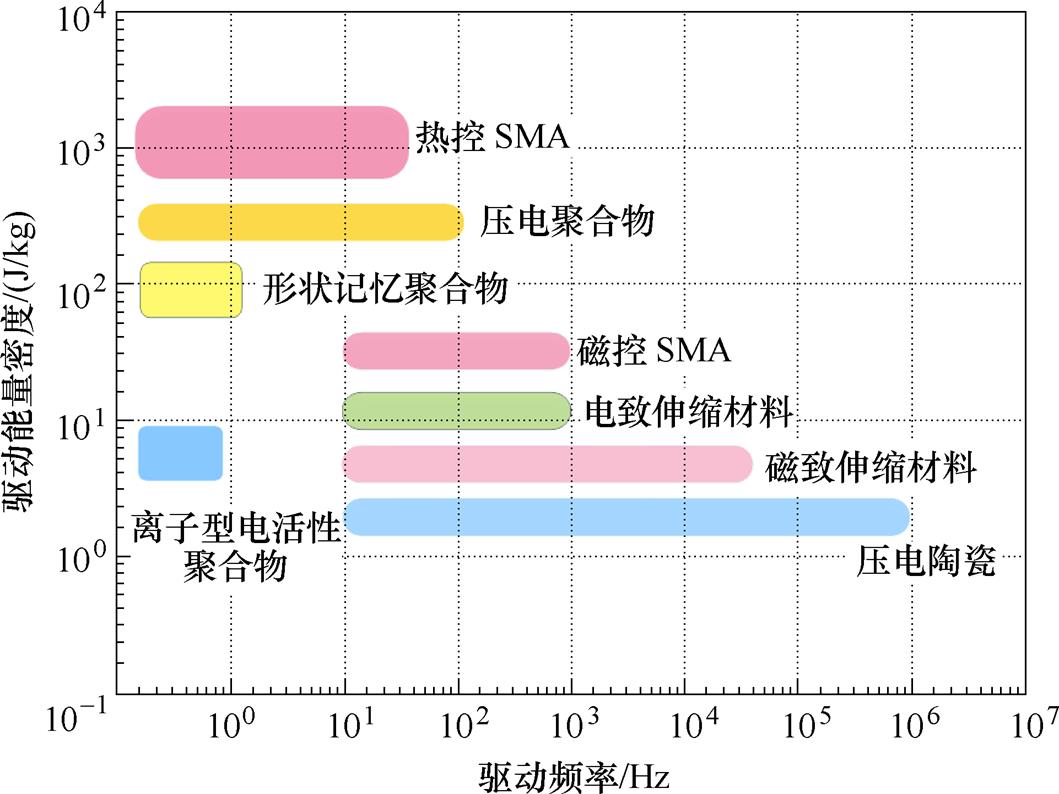
图5 智能材料驱动频率-能量密度对比
Fig.5 Comparison of smart material driving frequency-energy density
SMA宏观力学特性示意图如图6所示,一般金属材料经历弹性变形阶段(a1~b1)、屈服阶段(c1~d1)、强化阶段(d1~e1)和颈缩阶段(e1~f1),当经过屈服阶段后,逐渐伸长,经过颈缩阶段后,材料发生塑性变形,不能再恢复原来形状,但SMA在不超过一定载荷情况下加载产生变形后(a~b~c~d),通过升温,其能够恢复原来的形状(f~g)。图7所示为SMA丝式执行器运动原理,图中展示了SMAA一个运动循环过程,在状态a无负载的情况下,SMA丝内部为孪晶马氏体状态,通过加负载转变为状态b,SMA丝内部主要为非孪晶马氏体,此时SMA伸长长度为Lb-La,当通过外界加热后,SMA转变为状态c,SMA丝内部主要为奥氏体,长度恢复到状态a,当冷却后,SMA被负载再一次拉伸到状态d,图7中的循环过程对应图6中的a~g的加载产生应变和加热产生应变回复的过程。
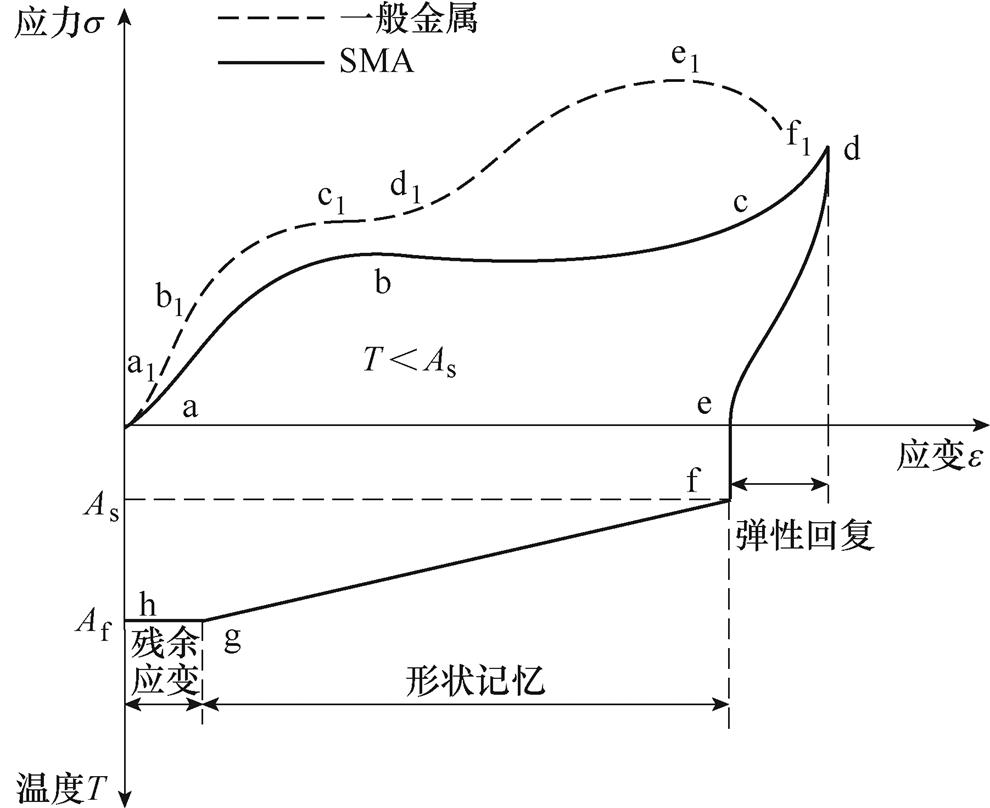
图6 SMA宏观力学特性示意图
Fig.6 Schematic diagram of the macro-mechanical properties of SMA
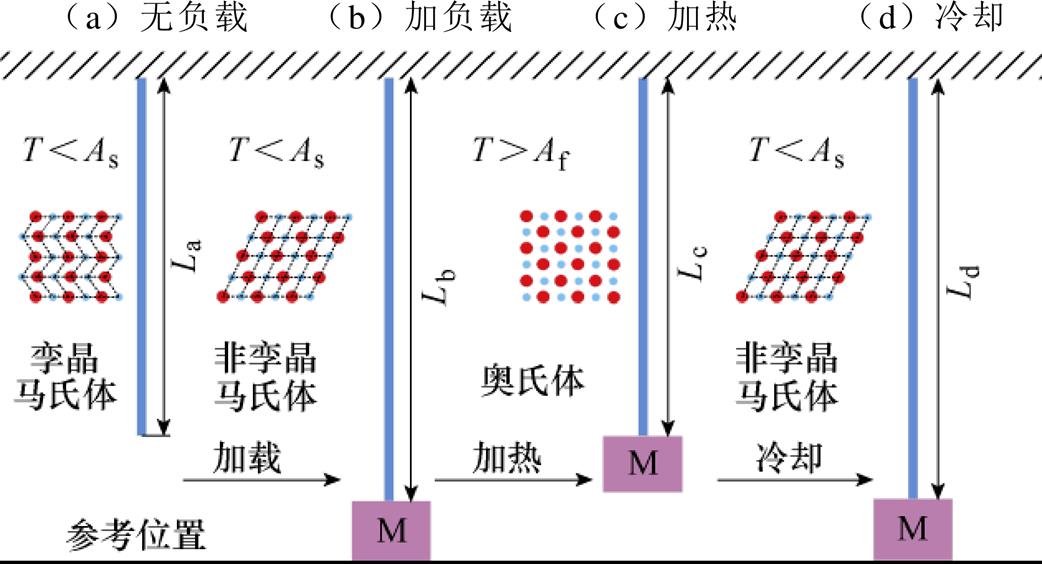
图7 SMA丝式执行器运动原理
Fig.7 Schematic diagram of SMA wire actuator motion
图8所示为SMA应变与马氏体体积分数对应的示意图,在加载的情况下,一般SMA丝产生最大应变不超过总长度的8%~10%,工程中为了提高使用寿命,通常选取在4%以下[32-33],从图7中可以看出,在低温情况(T<Mf 下,马氏体体积分数为100%,随着温度的提升,阶段A→B→C过程中,马氏体体积分数和应变同时减小,当完全转化为奥氏体时,马氏体体积分数为0,当温度降低,阶段C→D→A过程中,马氏体体积分数和应变同时增大,从图中可以看出,SMA驱动循环过程是一个典型的非线性滞后环节,这种特性给系统建模和控制带来一定的困难和挑战。
下,马氏体体积分数为100%,随着温度的提升,阶段A→B→C过程中,马氏体体积分数和应变同时减小,当完全转化为奥氏体时,马氏体体积分数为0,当温度降低,阶段C→D→A过程中,马氏体体积分数和应变同时增大,从图中可以看出,SMA驱动循环过程是一个典型的非线性滞后环节,这种特性给系统建模和控制带来一定的困难和挑战。
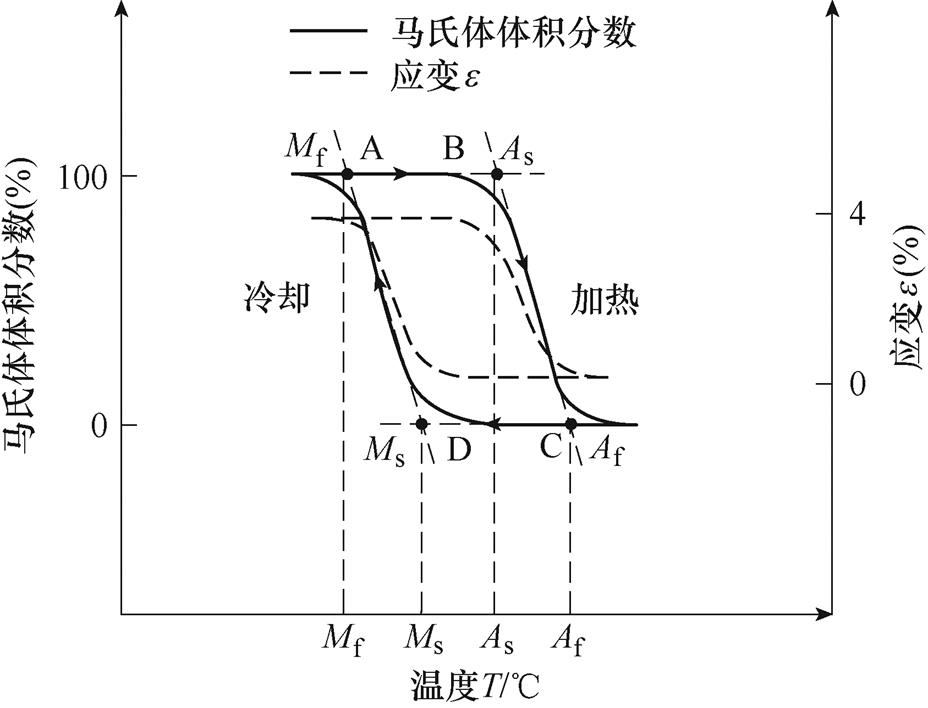
图8 SMA应变和马氏体体积分数示意图
Fig.8 Schematic diagram of SMA strain and martensite volume fraction
SMAA的综合设计理论主要包括针对实际工程应用建立合理的控制模型、针对SMAA迟滞非线性的系统特性设计合适的闭环控制系统和针对实际应用场景设计合理的本体结构,三个部分相互联系相互制约,因此下文将分别总结各部分的研究现状和主要研究内容,并通过综合分析各部分研究工作中的重点内容,探索SMAA的综合设计理论。
通常SMAA主要由SMA丝作为驱动元件,包括偏执式和对抗式两种配置方式,偏置式由SMA丝和弹簧构成,SMA丝为驱动元件,弹簧为复位元件,对抗式的驱动元件和复位元件均由SMA丝构成,偏置式的结构和控制相对对抗式简单,因此应用较广。相关研究中学者称SMAA为SMA驱动器、致动器或作动器,但在外文文献和自动控制领域中均称其为Shape Memory Alloy Actuator,为了避免歧义,本文均称为SMA执行器。
图9和图10分别为SMAA与常用执行器功重比的对比和输出位移-输出力的对比,从图9中可以看出,SMAA具有较高的功重比,而传统基于电磁式的电机和气动液压执行器都需要较大的体积和质量才能正常工作,因此在要求轻量化、小体积、高功重比和带负载能力强的应用场景下,传统执行器技术很难适用[34-36],SMAA却能够发挥其优势特性。图10中进一步对比了目前微位移执行器的性能,SMAA具有较大输出位移的同时具有较大的输出力和带载能力[37],因此SMAA特别适用于高功率密度、高精度和多功能性的执行器领域,如航空航天领域、机器人、生物医疗、汽车自动化和信息电子领域。
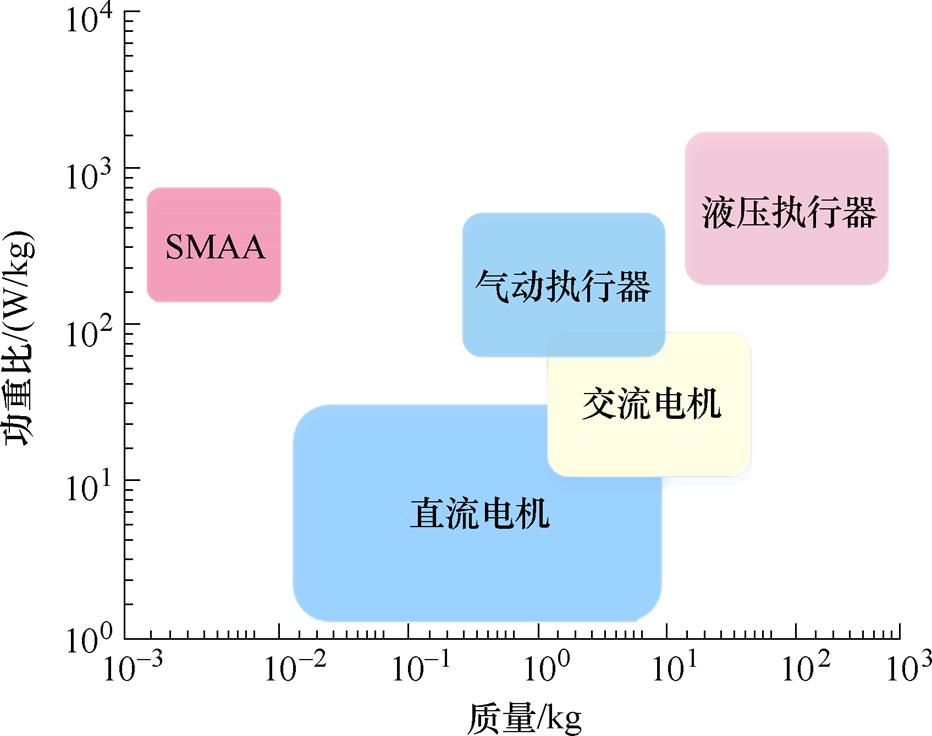
图9 执行器功重比对比
Fig.9 Comparison of actuator power-to-weight ratio

图10 执行器输出位移-输出力对比
Fig.10 Comparison of actuator output displacement and output force
SMAA按照不同分类标准的本体分类情况如图11所示,主要按照不同的载荷情况、运动形式和结构形式进行分类,定载荷情况下通常应用于实验室相关研究[38];线性变载荷形式通常采用弹簧作为快速回复元件[33];突变载荷则通常应用于航天非火工压紧释放装置中[39];直线驱动式在汽车发动机和电控阀领域逐步得到应用[40];旋转驱动式通过转换结构将直线运动转换为旋转运动[41];弯曲驱动器则通常利用仿生方法模拟动物的软体组织[42];装配驱动式直接利用SMA丝或弹簧以机械装配式集成到结构中[43];嵌入复合式通常采用SMA材料与其他材料复合的方式作为驱动元件[44];直接构件式为直接采用SMA作为元件构造外星球探测器新型轮胎结 构[45]。通过总结大量的研究发现,SMA丝和弹簧通电加热不仅控制方便,而且丝式SMA容易生产,因此大部分研究和应用均采用SMA丝和弹簧,较少采用SMA棒、板或薄膜形式。
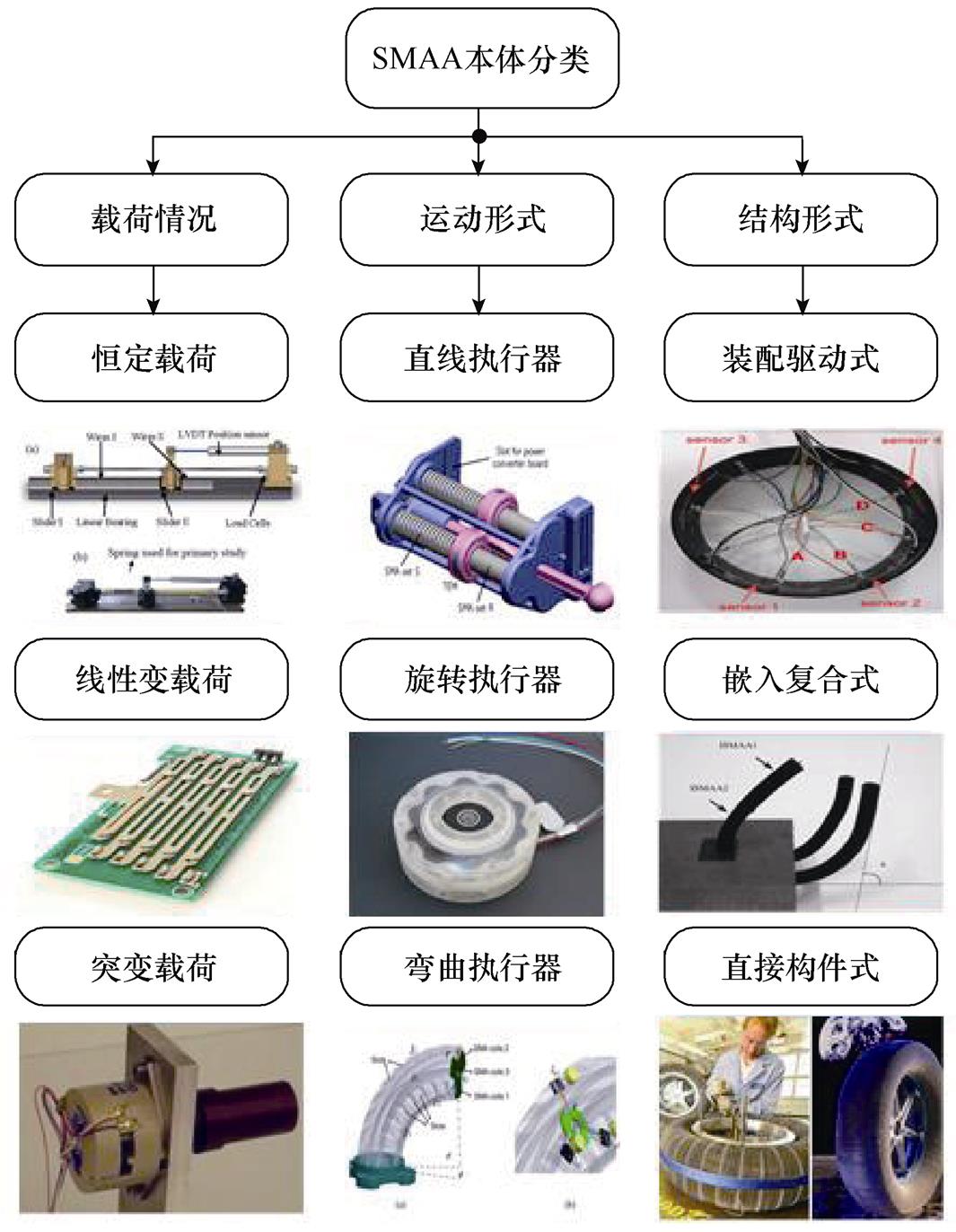
图11 SMAA本体分类
Fig.11 SMAA ontology classification
SMAA的控制模型作为分析和设计闭环控制系统的基础,在SMAA理论研究中具有非常重要的地位,不同学科背景的学者们在此方向发展出一系列控制模型,主要包括材料领域和控制领域的学者发展出的控制模型。SMAA控制模型分类如图12所示,材料领域的学者主要针对材料的本构模型进行建模研究工作,本构模型是SMA在不同温度情况下的应力应变模型,可以理解为温度-应力-应变三维控制模型,根据研究的尺度不同,主要分为微观热力学模型、细观力学模型和宏观维象模型。控制领域的学者主要采用机理建模和数据建模两种方法建立SMAA的控制模型。机理建模方法主要根据热力学模型、本构模型、相变模型和运动学模型建立SMAA的控制模型,数据建模的方法主要包括参数辨识、数值建模和逆模型补偿建模方法。
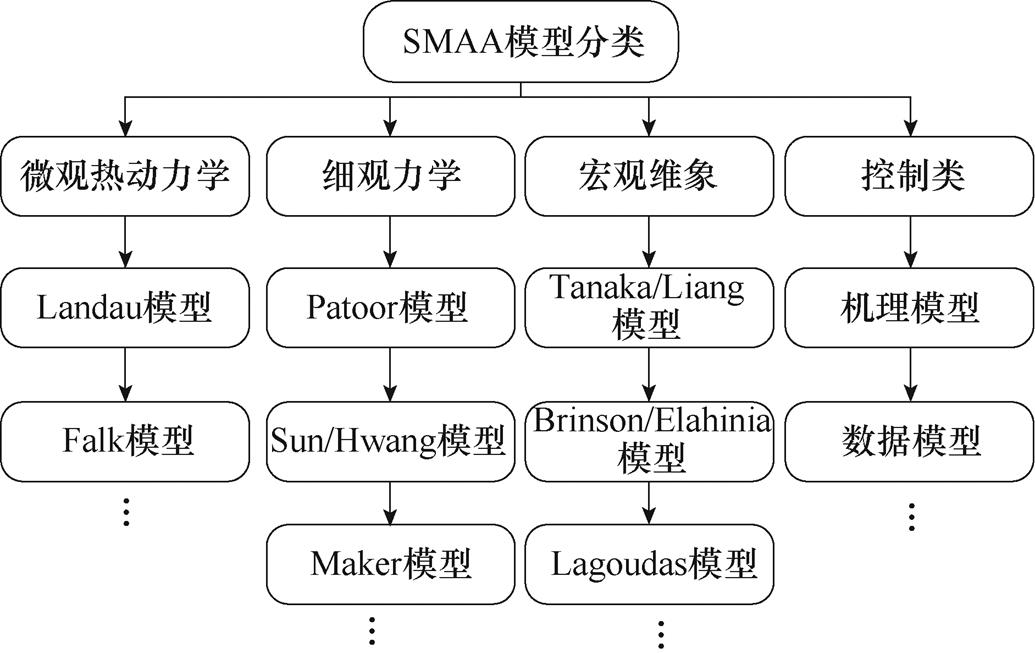
图12 SMAA控制模型分类
Fig.12 Classification of SMAA control model
微观热力学本构模型主要分析一个无限小体积内的微尺度力学行为,能够从微观角度揭示材料相变机理,从最底层物理方面揭示SMA各种宏观力学行为,如Landau模型和基于Landau模型发展出的Falk模型[46-47],此类模型参数非常多,计算精度较差,适合基础理论研究,不利于工程中应用。细观力学本构模型从单个晶粒的力学行为描述入手,从而实现SMA宏观力学性能的描述,如Patoor模型、Sun/Hwang模型和Maker模型[48-50],但模型参数也非常多,三维计算非常复杂,同样不利于工程应用。宏观维象模型直接重点研究SMA的宏观力学模型,不侧重从物理机理上研究SMA的力学行为,能够采用较少的内变量和材料参数简单高效地对形状记忆效应和超弹性特性进行数学描述,如Tanka模型、Liang模型、Brinson模型、Elahinia模型和Lagoudas模型[51-55],目前在工程中已经被广泛采用。目前的本构模型虽经历了一维、三维和循环衰减模型三个研究发展阶段,但仍有很多未考虑的因素,如循环加载、蠕变、多轴载荷、跨尺度和多维本构模型的建立,以上有待建立的模型将有助于SMA在工程中的应用,并有利于工程设计过程中仿真阶段的精确建模仿真,提高SMAA工程实现的可靠性和快速性。
非线性迟滞现象普遍存在于智能材料中,但不同种类智能材料的非线性滞回曲线的形状各不相 同[56-58]。为了更好地说明SMAA的非线性迟滞特性对建模和控制提出新挑战的问题,如图13所示为通过开环实验对一自由度丝式SMAA直线型执行器进行的开环响应实验。图13a所示为通过频率较低的1/160Hz的三角波电流驱动,SMAA的应变变化情况,从图中明显地看出,加热电流激励信号与输出应变具有典型的非线性迟滞特性,图13b采用不同幅值的三角波电流进行加热和冷却实验,从图中可以进一步看出,加热曲线和冷却曲线不重合,且具有一定的迟滞宽度,不同幅值的电流激励情况下大滞环内出现了小滞环,传统的建模和控制方法对这种特性的适用性较差,需要采用新的建模和控制策略实现SMAA位置的精确控制。

图13 SMAA非线性迟滞实验曲线
Fig.13 SMAA nonlinear hysteresis experimental curves
SMAA机理模型与逆模型补偿示意图如图14所示。针对SMAA非线性迟滞特性,控制领域的机理建模方法如图14a所示,机理建模方法在实际应用中的热力学模型、本构模型和相变模型在相同材料的情况下具有通用性的优点,只需结合不同本体结构运动学方程即可方便地建立控制模型,但热力学模型、本构模型和相变模型不仅在数学推导建模过程中有较多的理想化条件,而且需要较多的参数测量,导致建模的误差较大。如文献[59]中采用提出的机理建模方法应用到机械手的变结构位置控制器的仿真设计过程中,实验结果表明,该控制系统具有快速、准确、鲁棒的特点。文献[60]采用机理建模方法结合神经网络预测控制进一步对比了变结构控制和神经网络预测控制的效果,最终得出神经网络预测控制效果较好的结论。
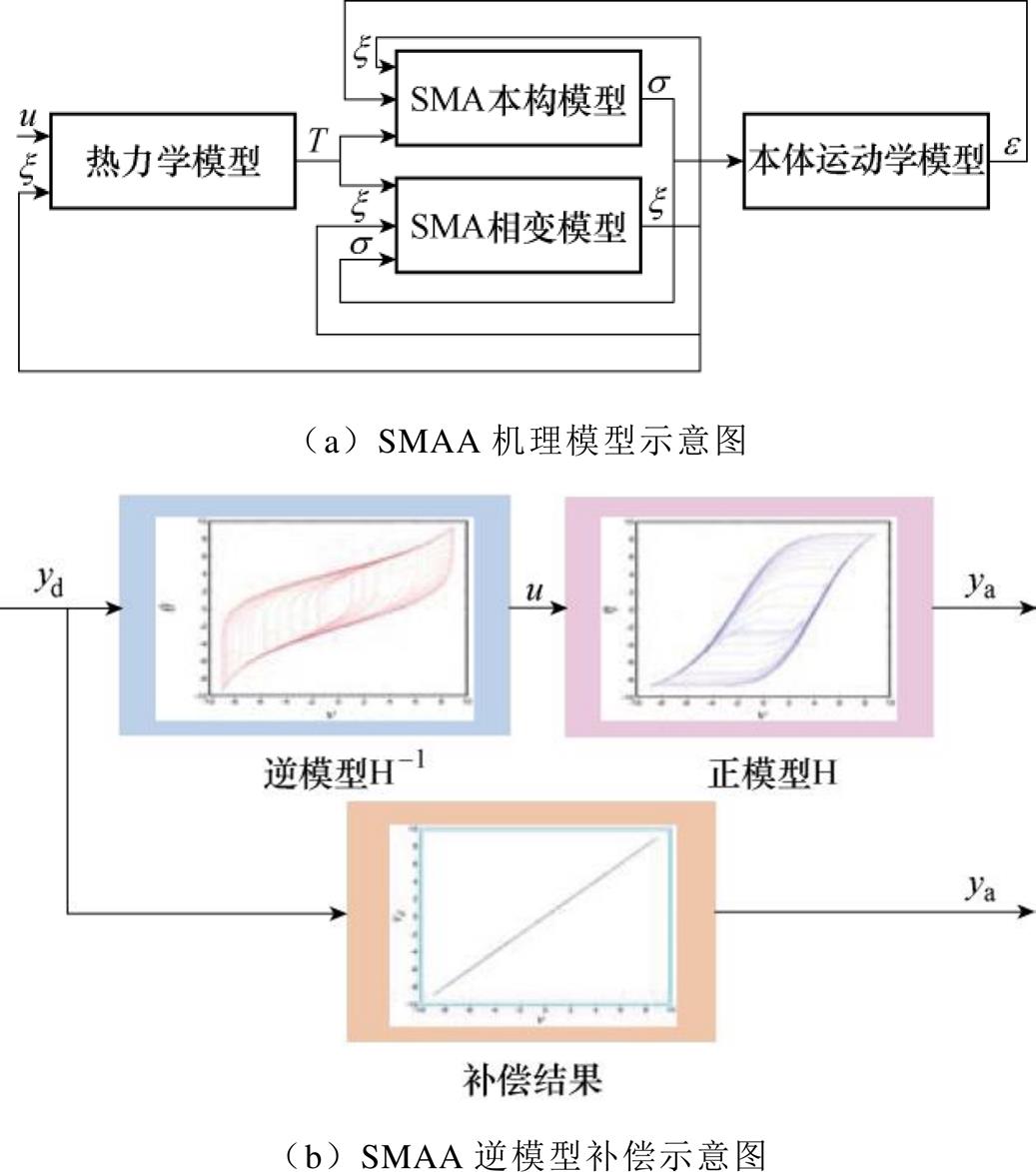
图14 SMAA机理模型与逆模型补偿示意图
Fig.14 Schematic diagram of SMAA mechanism model and inverse compensation model
控制领域针对SMAA非线性迟滞特性的数据建模主要采用控制领域灰箱或黑箱的辨识思想,参数较少且实现简单,因此得到SMAA领域研究学者的青睐。如文献[38]中采用基于Liang模型和经验模型的非线性SMA动态模型,提出了一种基于卡尔曼滤波的主动建模方法,实验结果证明了该建模方法的可行性和准确性。文献[61-63]为了实现SMAA的自感知控制,在不同温度、应力实验条件下通过数值建模的方法建立了SMAA的多项式自感知控制模型,实验结果表明了该建模方法可以实现SMAA自感知位置的准确控制。
数据建模方法中逆模型补偿建模方法主要分为物理模型和唯像模型,基于物理量的回滞模型对回滞的物理意义进行分析,给出相应的方程式来表征,方程中的参数主对应系统的物理量,如文献[64]中针对磁滞材料提出的Jiles-Atherton模型,由于主要针对磁性材料且涉及的参数较多,较难应用于SMAA的建模过程中。唯像模型不考虑回滞的物理意义,根据回滞的输入输出特性和状态特性,利用等效或者平均原则等变换得到的数学模型,主要包括基于算子的回滞建模方法(Preisach模型[65]、Prandtl-Ishlinskii模型[66]和KP模型[67])和基于微分方程的回滞建模方法(Backlash-like模型[68]、Duhem模型[69]和Bouc-Wen模型[70]),逆模型的补偿建模示意图如图14b所示,通过在不同激励信号情况下采集到的输出数据,建立系统的逆模型来补偿系统本身的非线性滞后特性,最终实现系统线性化的目的,其逆模型可作为系统前馈控制器进而实现系统的开环控制。
SMAA的控制模型是一个具有低带宽非线性迟滞特征的环节,因此为了实现SMAA在速度、尺度、力度、精度、维度和力密度上的精确控制需要采用合理的控制策略。SMAA的控制策略发展与控制领域的控制策略发展历程相似,主要包括经典控制策略、现代控制策略和智能控制策略。
工业领域经典PID控制策略使用率超过95%,但常规的PID控制策略并不适用SMAA的非线性迟滞特征的控制,因此相关研究中常采用改进型PID控制策略,SMAA控制策略框图如图15所示。如图15a为文献[71]中提出一种采用滞后补偿器和误差调节器的增强型PID控制器,并通过实验证明了该方法的有效性和可行性。图15b为文献[72-73]中提出的一种以传统PID控制器为基础的PID-P3控制器,用来实现精确的位置跟踪,通过在传统PID控制器上增加一项三次定位误差项,在减少定位系统的沉降时间和超调方面具有十分明显的效果。图15c为文献[74]中提出的一种双线性PID控制器作为非线性控制器的子集对SMAA的驱动位移进行控制,与经典PID对比,结果证明了双线性PID性能更好,但增加了功耗。
SMAA的现代控制策略研究中,如图15d为文献[75]中提出了一种SMA丝与支撑盘编织而成的新型执行器,并将鲁棒控制策略(变结构控制)应用到系统控制中,实验结果证明了非线性的鲁棒控制策略具有更好的系统控制性能。图15e为文献[76]中提出采用滑模控制器作为SMAA驱动的旋转机械臂的控制策略,采用扩展卡尔曼滤波器计算了实际应力,并与期望应力进行了比较。然后通过比例积分控制器对应力误差进行控制,结果表明,变结构控制器设计在跟踪静止和变输入信号方面具有较高的精度。图15f为文献[77]提出的一种应用于SMAA的直接自适应控制策略,具有参数整定和噪声鲁棒性等优点,并引入了卡尔曼滤波器来消除输出测量噪声和在线估计系统状态,通过仿真和实验结果,验证了带有卡尔曼滤波器的直接自适应控制器具有良好的控制效果,几乎补偿了所有的迟滞现象。


图15 SMAA控制策略框图
Fig.15 SMAA control strategy block diagram
SMAA智能控制策略研究中,如图15g中所示为文献[78]中提出的以Mamdani模糊算法为基础的模糊控制器,以机器人手指的参考位置与实际位置的误差和误差变化率作为系统的输入变量,实验证明了模糊控制方法的高效性。图15h为文献[79]中提出的基于简单逆经验滞回模型和神经网络的精确位置控制方法,该方法具有非常好的准确性和快速性。另外,很多文献中提出了基于智能控制与经典和现代控制相结合的控制方法,在此不在赘述。
SMAA本体分类2.1节已概述,但未详细表述其研究方法和设计理论,SMAA的本体设计理论主要涉及设计要求、设计规范和设计方法。本体研究中根据SMAA执行器运动形式的不同主要分为线性、弯曲和旋转执行器。
SMAA线性执行器相关研究和工程设计如文献[40]中采用SMA弹簧对抗式设计的发动机进气管装置,主要用来替代传统电磁和气动执行器,其在体积、质量、装置复杂性和成本等方面均要优于传统执行器,但其功耗略高。SMAA本体设计分类如图16所示。图16a所示为Kinitic Automation公司开发设计并经过严格测试量产的SMA电动线性执行器,在位置控制、峰值力保持和自驱动等方面均优于传统电磁式和气动执行器[80]。图16b所示为Miga Motor公司生产的印制电路板(Printed Circuit board, PCB)载线性执行器,采用弹簧或弹性金属棒作为偏置元件,并采用并联式结构实现较小空间内较大位移的输出,同时设计了板载驱动电路,只需外接电源和控制信号就可实现线性或PWM控制方式的切换[81]。
SMAA弯曲执行器的研究前文多次提及,如仿生软体蠕动机器人和辅助医疗器械软体驱动等,其中文献[42]中由象鼻启发采用SMA弹簧与支架结构构成的弯曲执行器,充分利用了机电一体化的设计理念,其通过内部安装的位置传感器和外部控制器,能够实现多种弯曲变形形状。图16c所示为文献[82]中提出采用SMA丝作为驱动器的神经外科主动变刚度执行器,与2.1节所述用于医疗器械软体驱动应用中类似,其不仅能够实现功能需求,而且具有传统驱动方式不具备的优点和特征。图16d所示为文献[83]中提出了一种采用SMA薄板驱动的折纸机器人,通过合理的材料形状热处理过程,并采用自感知PWM控制,能够实现折纸机器人的不同形状的变形。

图16 SMAA本体设计分类
Fig.16 SMAA ontology design classification
SMAA旋转执行器的研究是三种执行器中最复杂和最具有意义的研究方向,因其具有可替代传统电磁式旋转电机的潜力,为低频大转矩旋转电机的设计提供了新的思路和发展方向。文献[41, 84]中所提均为平面旋转执行器,文献[41]中根据摆动步进电机的工作原理设计了旋转驱动机构,在该驱动器中,由渐开线齿轮组和曲轴组成的驱动机构能够有效地将SMA线的膨胀和收缩转化为高转矩的旋转运动。图16e所示为采用双盘式摆线减速器作为转矩放大器,具有配置简单,可变尺寸和转矩放大特点,从而使电机结构紧凑同时能够产生较大转矩。图16f所示为文献[85]中提出的一种立体式连续旋转执行器,将5个旋转执行器串联固定在一个轴上,当每个执行器依次执行时,SMA电机可以实现连续旋转。
SMA在航空航天中用于实现飞行器轻量化、高效率和高精度的设计需求,SMAA作为实现飞行器较高设计需求的先进手段,主要作为驱动特定结构运动从而改变结构特性或触发预设动作,分为直接构件式智能结构、机翼调节结构、发动机进排气调节结构和航天压紧释放结构。
SMAA航空航天应用如图17所示。SMAA直接构件式智能结构如图17a~图17c所示,图17a为阿波罗11号登月舱的智能天线,也是最早SMA应用之一,通过在地面将天线设计好后,折叠放入登月舱内,有效降低了天线所占的空间,登月舱到达后,可通过加热方式将其恢复原来形状。图17b为Aerofit开发的SMA管接头,已经被大量应用于军用飞机,大大降低了飞机管线漏液情况的发生。图17c为星球车上采用SMA作为太阳能翻板展开时的驱动器和传感器位置操作的应用,在功能上完全替代电机执行方式外,减小了体积和质量以及对驱动电路传感器的需求[86]。
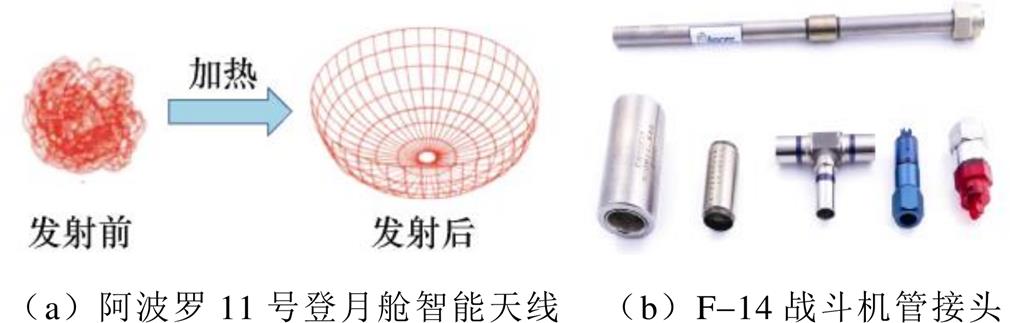

图17 SMAA航空航天应用
Fig.17 SMAA Aerospace Applications
SMAA机翼调节结构用于改变机翼形状和状态,使飞行器在不同环境和执行不同任务的过程中始终保持气动性能最优,同时提高安全性、可靠性和降低噪声。图17d和图17e所示为1995~2001年NGC公司与DARPA/AFRL/NASA合作开展的Smart Wing项目,主要采用对抗式和扭管式驱动器对机翼形状和扭转角度进行调节,在风洞的各项测试中,均达到了较优的效果,证明了SMA在机翼调节应用中的可行性和优越性[87-88]。
SMAA发动机进排气调节结构用于改变飞行器进排气通道的结构,改善发动机的气动性能和优化飞行噪声。图17f所示为波音公司为了降低飞机发动机外涵喷口喷射噪声设计变几何结构,采用SMA薄板与发动机外涵喷口V型锯齿结构复合,形成了可变结构的V型锯齿,有效降低了噪声。图17g所示为SAMPSON公司利用SMA束驱动器与蒙皮复合的结构,对F-15战斗机进气整流罩、导向前缘的俯仰调节及流道内壁形状调节,提升了进气道的气动性能[89]。
SMAA航天压紧释放结构主要利用SMA触发特殊设计的机构,实现航天器结构之间的压紧和释放功能。传统载人航天任务中连接分离装置主要采用火工装置,冲击载荷较大,可靠性、安全性较差,不能重复使用,容易产生太空垃圾,因此美国于1999年利用SMA驱动的形状记忆合金释放装置在Mightysat I卫星上进行了实验,如图17h、图17i所示为压紧释放装置的整体和内部结构,压紧释放装置主要通过电脉冲来实现释放功能,脉冲一般只需持续20~40ms的28V电压5A电流,不仅具备高安全性、高可靠性、低冲击载荷和重复使用的能力,而且只需简单的驱动电路和较少的驱动能量。目前,欧美国家已经将其成功应用于几十个型号的卫星上,完成了5 000多次的在轨释放任务。图17j所示为Arquimea公司生产的拔销器,目前也已成功应用于航天设备中[90-91]。
SMAA在机器人中的应用主要为了实现现代机器人仿生化、柔性化、智能化、轻量化、小型化等目标,SMAA能够打破传统基于电机、气动或者液压等驱方式设计机器人的原则,具有较高的设计灵活性,根据机器人仿生对象的不同,主要可以分为仿生物机器人和仿人机器人,仿生物机器人可分为行走、蠕动爬行、跳跃、游动和飞行等,仿人机器人可分为人工肌肉、人工手和人工眼等。
2005年,J. M. Conrad教授开发了一款用于SMA和机器人教育的SMA六足爬行机器人。图18a所示为六足机器人的足部由SMA丝通电加热控制,控制由PCB上携带的微型控制器实现,此款教育用机器人避免了采用由直流电机构成的驱动机构,也避免了采用齿轮变速传动等环节,实现了轻量化和小型化的设计目标[52]。图18b~图18e分别为蚯蚓启发、跳蚤启发、魔鬼鱼启发和蝙蝠启发而设计的机器人[53-55],可以看出,采用SMAA作为执行器不仅能够实现软体机器人的设计,而且具有较高的设计自由度,同样避免采用传统体积质量较大的直流电机和复杂易磨损的减速机构作为驱动机构。
目前,常见的仿人机器人多数为刚性部件构成,主要由伺服电动机、气动和液压等作为驱动源,而人类的身体和器官为软硬动态结合的系统,传统的刚性驱动系统不能很好地模仿人类的各种动作,而SMAA为仿人机器人提供了一种设计途径,图18f~图18h分别为仿人工肌肉、仿人机械手和仿人工眼球[92-96],SMAA不仅能够实现较好的动态性能,而且能够较好地模仿人类动作的平滑柔顺性。

图18 SMAA机器人应用
Fig.18 SMAA robot application
SMAA在生物医疗领域主要利用NiTi合金良好的生物相容性和高功重比的驱动能力来实现矫正整形固定、医疗手术器械和康复训练的性能。
SMAA生物医疗应用如图19所示。SMA在牙科的矫正整形和骨科的固定器应用分别如图19a和图19b所示,SMA矫正固定器与传统不锈钢矫正固定器相比,SMA矫正固定器能够在人体内维持在超弹性状态,不仅拥有较好的生物相容性,而且不容易发生变形,矫正力非常好[97],另外用于心血管支架的自蓬式SMA支架管和用于狭小空间套取结石的SMA网篮已经广泛应用于医疗手术中。
图19c~图19f分别为SMAA医疗器械中主要用于微创手术中的心房治疗、图像采集、肠道内窥镜和手术机器人[58-61],SMAA在这些狭小空间工作的优势要远远高于传统电磁式电机和其他智能驱动材料执行器。文献[98]中提出的用于房颤治疗的手术器械,不仅能够实现狭小空间的各种动作需求,而且由于通过电加热形式非电磁式驱动,能够很好地兼容核磁共振技术。文献[99]中提出了一种基于SMA的图像引导外科手术中尺度扭转驱动器,该扭力驱动器由一对对抗SMA扭力弹簧通过交替焦耳加热和自然冷却实现双向驱动,显著提高机器人的灵活性和机动性,最终通过集成到手术机器人原型机中验证了设计、建模和控制的效果。文献[100]中对比了SMAA、无刷直流电机和离子型金属聚合物执行器在微型内窥镜领域的性能对比,SMAA具有驱动电压低、力量大、结构简单和无需转换结构等优势。文献[101]提出了一种折纸启发基于SMAA驱动的微创手术四自由度抓手,实现了微创手术抓手平移和旋转灵活运动和狭小空间的设计要求的同时,大大简化了抓手的复杂结构。
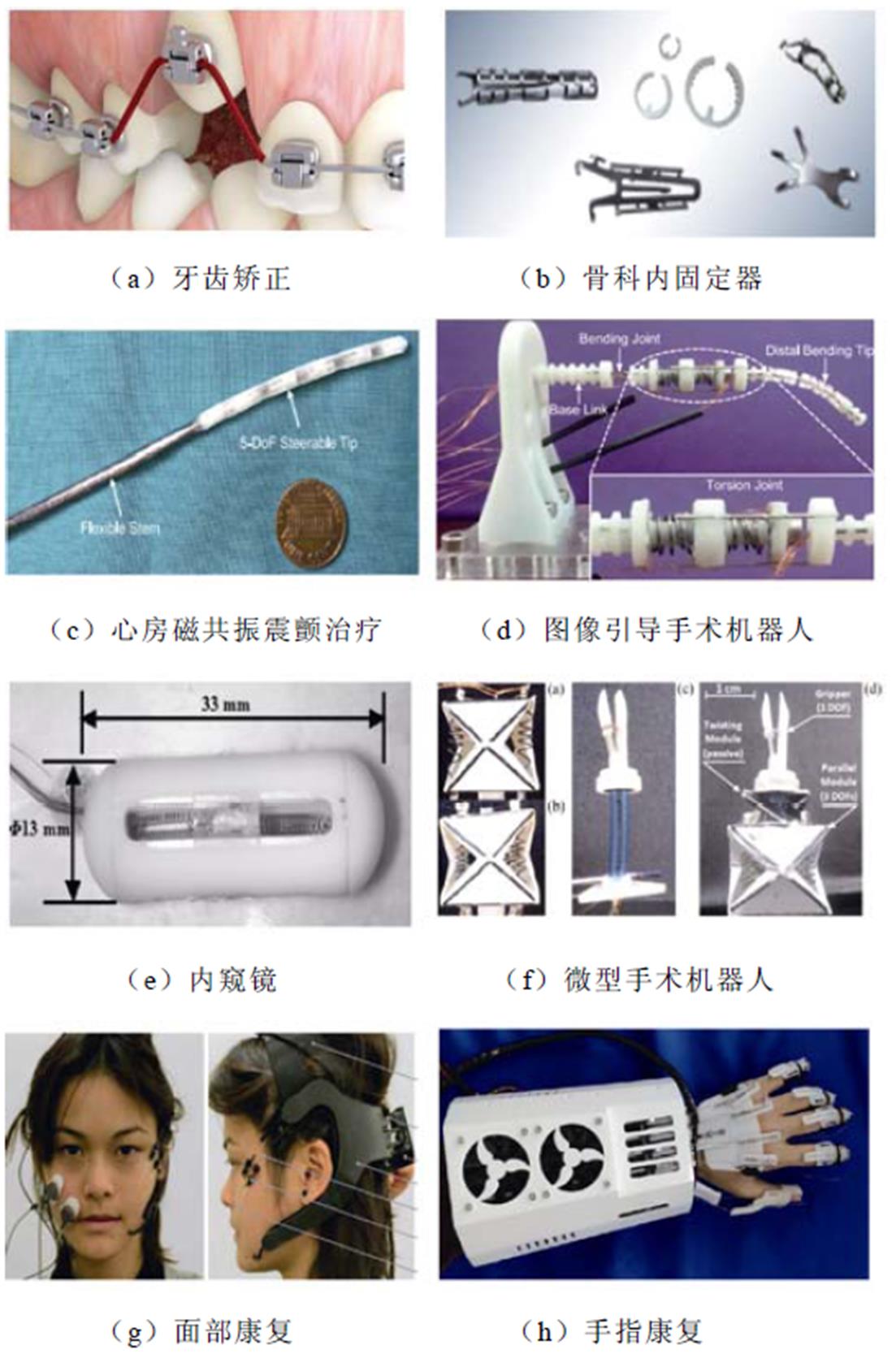
图19 SMAA生物医疗应用
Fig.19 SMAA biomedical applications
医疗康复领域的机器人通常采用传统基于电机和气动驱动手段的机器人,不仅设备体积质量较大,而且较复杂,如气动设备,不仅需要控制器还需要较多的中间气动控制机构。SMAA在人体康复训练中的应用如图19g和图19h所示[102-103],文献[102]中提出了一种基于SMAA驱动辅助治疗面瘫的机器人面具,通过SMA拉动机构来操纵肌肤,以增强面部的活动表情表现,此项研究中心通过人体解刨学的分析和利用深度图像传感器和距离传感器等手段优化机器人面具的动作,证实了面瘫辅助治疗机器人具有良好的辅助治疗效果。文献[103]中提出了一种基于SMAA手部康复治疗的机器人,极大地减轻了设备的体积和质量,具有非常好的驱动柔顺性,提高患者使用体验的同时,能够结合肌电反射并通过控制器不同的控制方法,实现多种康复模式的训练治疗。
SMAA在汽车自动化领域的应用主要为了实现轻量化、电动化和高效率等目标,主要可以分为车身系统和动力系统的应用。SMAA在信息电子产品中的应用主要分为通信天线、盲人触摸显示器和摄像头光学对焦防抖等。
SMAA汽车自动化和信息电子产品应用如图20所示。现代汽车电动化和智能化对传感器和执行器的市场需求猛增,而在整车中的执行器结构会越来越多,目前一台普通汽车中约有100~200个执行机构,而多采用技术成熟且安全的电机作为执行机构,很多线性或者简单的旋转执行机构并没有经过技术优化,因此汽车厂商在能够减小体积、质量和费用的新型执行机构方面开展了相关的研究,SMAA在汽车中的部分代表性应用如图20a~图20f所示,分别为仿炫光可控后视镜、油箱盖开启装置、换气格栅开关装置、后备箱通风孔开关、发动机进气管装置和利用尾气发电的装置[40, 104-105],这些应用在实现功能需求的同时,避免了采用电机作为驱动器和采用额外的传感器,大大简化了装置复杂的结构,有效地降低了体积质量和成本。
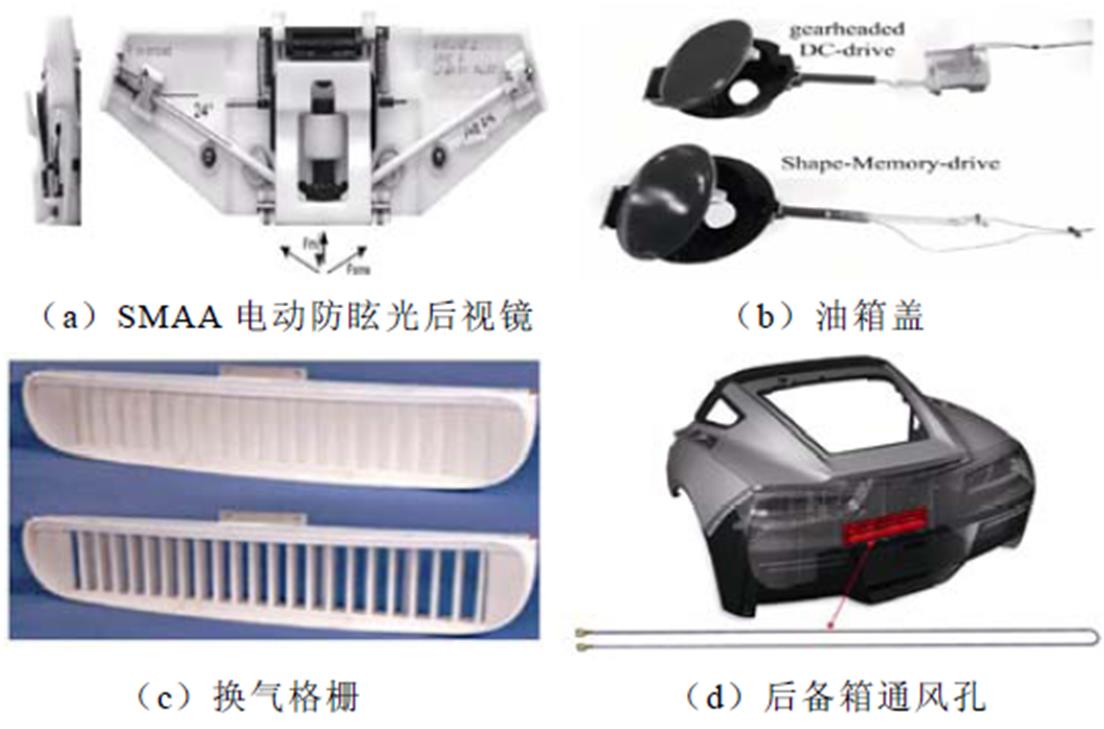
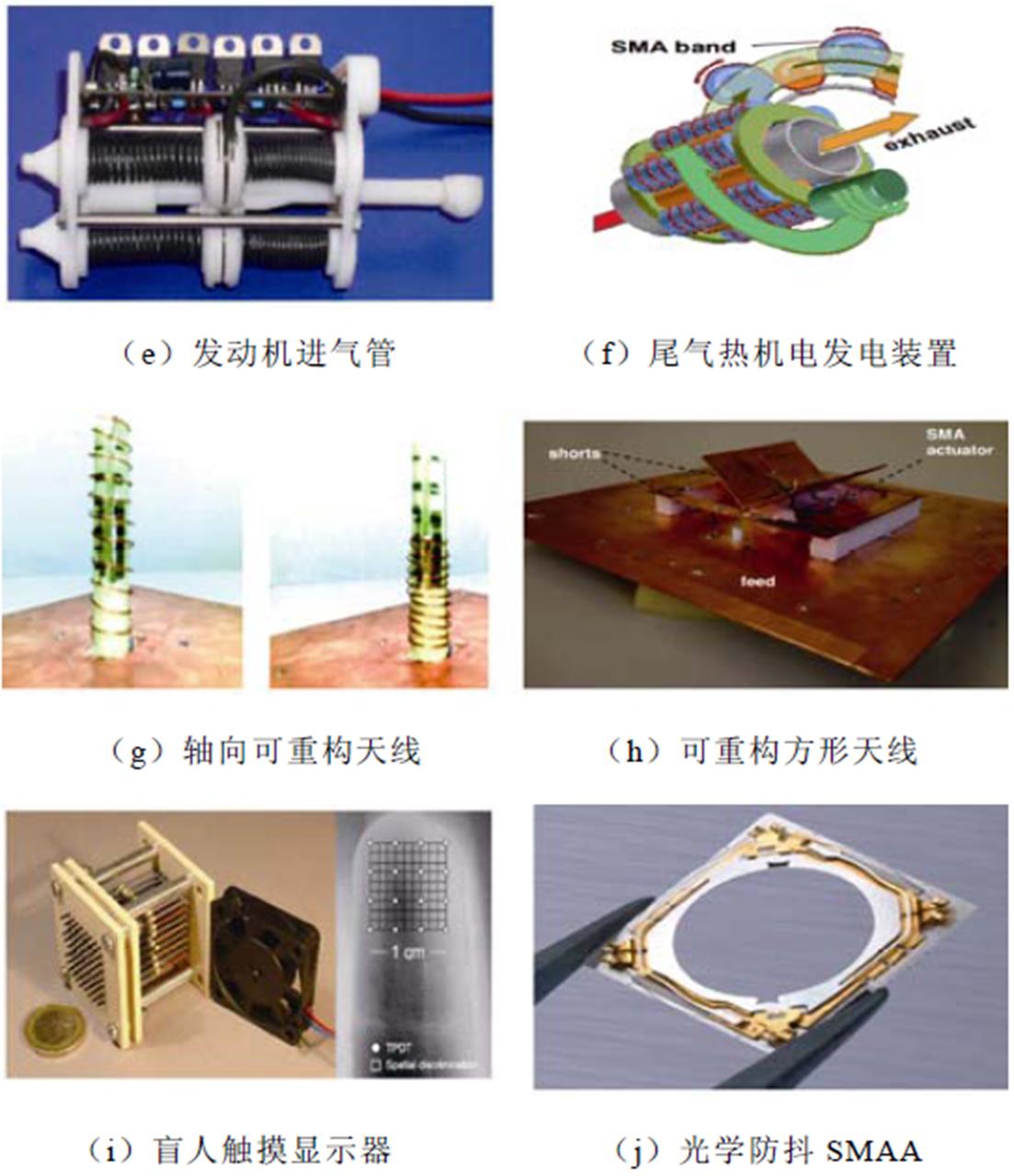
图20 SMAA汽车自动化和信息电子产品应用
Fig.20 SMAA automotive automation and information electronics product application
通信领域的可变结构天线能够实现天线不同的工作模式,基于智能材料的可重构智能自适应天线为可变结构天线提供了一种新的思路和新的解决方案,如图20g、图20h所示为轴向可变结构和方形可变结构天线[106-107],不仅能够实现可变天线增益,而且能够实现良好的阻抗匹配。文献[108]提出了一种基于SMAA弹簧驱动的盲人触觉显示装置,该装置具有成本低、质量轻、体积小、便携性高等优点,样机由64个SMA驱动的触感引脚组成,具有2.6mm的分辨率,以上特点非常有利于该装置的市场推广。由剑桥机电公司和华为公司联合开发的具有亚微米级精度的光学防抖执行器,不仅体积、质量和成本均比常用的音圈电机要低,而且具有较高的带负载能力、无电磁噪声和结构简单的特点,适用于手机较大像素和较大镜头的应用场景,目前在华为旗舰机中已经被广泛应用[109]。
为了探索性地提出和发展SMAA综合性的设计理论,首先对SMA的发展历史、微观材料特性和宏观力学进行详细介绍和讨论,将SMA材料特性和属性进行了详述,讨论了SMA不同材料种类的优缺点,对比了不同种类智能材料的性能,并详细介绍了SMA的宏观力学特性,能够为研究和设计人员提供基本的概念和对SMA适用场景的初步理解。其次针对SMAA的基本概念与其他原理的执行器进行了对比研究,进一步得出SMAA的特性和适用的应用场景。再次通过综述目前SMAA控制模型、控制策略和本体设计理论的研究现状,得出基本建模方法、控制器设计以及本体设计的基本依据和方法。最后通过综述目前SMAA在航空航天、机器人、生物医疗、汽车自动化和信息电子产品等领域的应用研究和设计,较全面地展示了SMAA目前针对不同场景情况下的应用设计的需求和目的,同时能够提供给相关领域的研究人员,借鉴已有的应用研究的理论和设计经验,为发展综合性的设计理论奠定了良好的理论基础。
虽然SMAA理论和应用研究的文章和专利数量逐年增加,但实际上真正可用的设计却非常少,主要原因包括无统一综合的设计理论、缺乏正式的指导方针和相关的设计工具来指导设计。为了发展综合设计理论,本文通过归纳总结目前大量理论研究和工程设计文献,探索性提出了如图21所示的本体综合设计理论的基本流程,首先,通过第1节和第2节的综述和分析得出SMAA适用于低频响高应力大行程的微驱动器应用场景。
图21中工程设计需求分析阶段,要明确SMAA是否适用此场景以及具体的功能需求和性能需求,如功率(力或负载)、位移(行程或角度)、带宽(速度或频率)、工作条件(温度、电压、电流)、外形(体积、质量)、驱动类型(线性或旋转)、寿命要求和价格等,这部分参数的确定可以结合实际需求和本文所提的相关研究内容进行确定。机电一体化设计阶段根据设计需求分析阶段的参数设计样机的机械结构和电气驱动电路,此部分设计内容可以参考本文所提的本体设计研究的相关研究内容和机械电子学领域的基本的工程设计实践思想。当本体设计与电气驱动电路设计完成后,应建立工程简化的本体模型并结合本文所提的控制模型研究和控制策略研究选择合适的建模方法和控制方法,此部分还可以根据实际情况提出新的建模和控制方法。在本体结构设计、控制模型以及控制策略初步确定的情况下,应首先借助计算机仿真手段验证本体、建模和控制的正确性和合理性,经过仿真验证,如果符合设计的基本要求,则进行实物的制作和实验测试,如果仿真验证阶段出现问题,则应先返回到机电一体化设计和控制模型以及控制策略阶段进行优化设计,如果实物实验阶段出现问题,则同样返回进行优化设计,最终经过优化设计的样机还需经过产品的工程化阶段验证,通过工程化的检验,最终才能确定一个合格的产品,但目前的相关研究普遍理论性强工程性弱,因此SMAA的综合设计理论还需经过科学家和工程师的不断探索才能进一步完善。
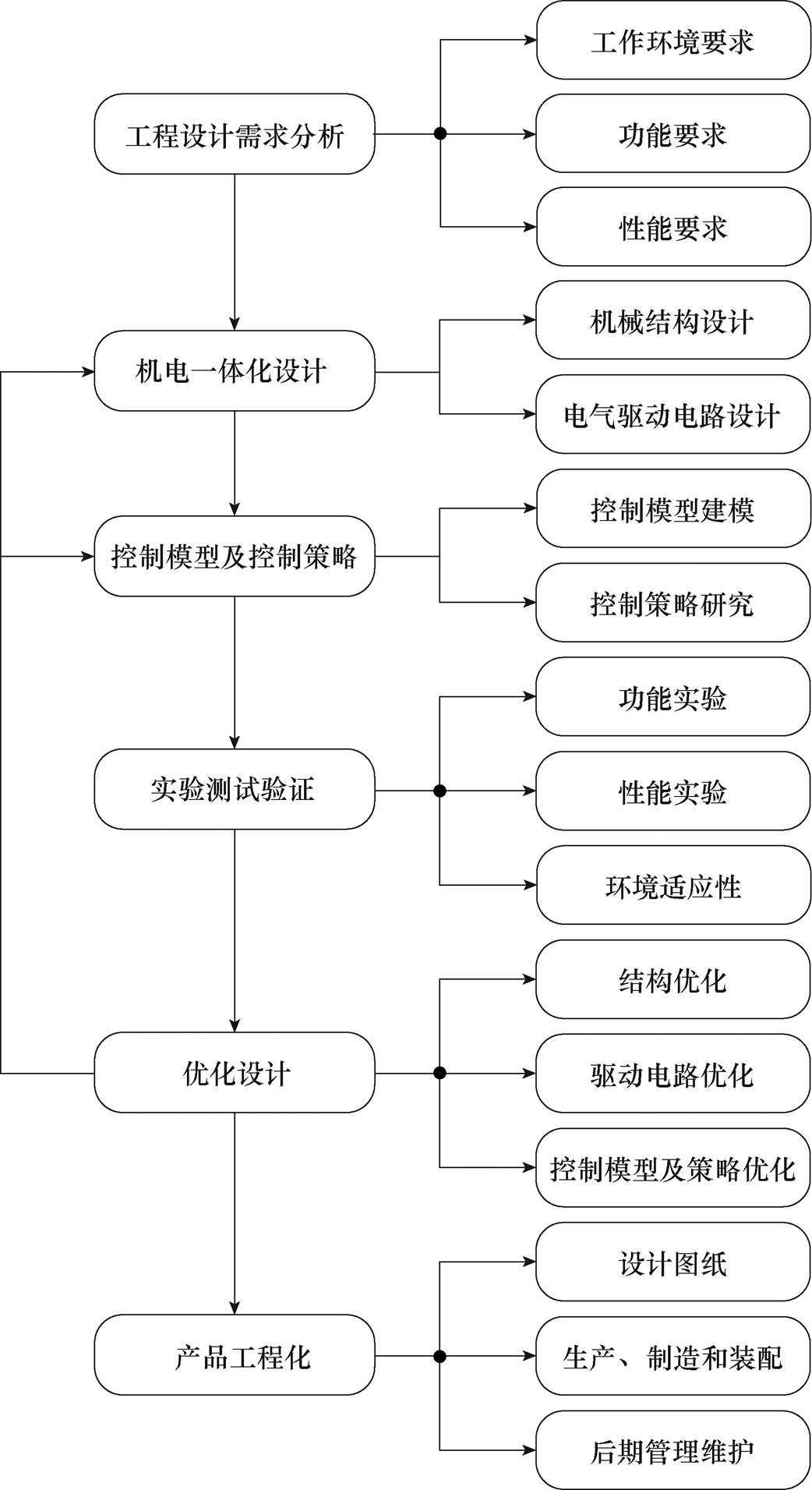
图21 SMAA综合设计理论
Fig.21 SMAA comprehensive design theory
(1)理论研究问题。主要包括材料特性理论、本体设计理论、控制模型理论和控制策略理论。目前,材料性能较好且较稳定的SMA材料均为低温相变,NiTi类合金不仅限制了SMAA在高温环境的应用,而且价格较高,因此需要进一步研究SMA材料理论特性,发展出性能较优、价格低廉的高温相变SMA材料。目前,关于SMA研究的主要课题集中于材料特性、处理过程和冶金性能上,材料科学家与工程师之间脱节,SMA的应用过于专业化,因此如何有效地整理相关材料信息,方便工程师使用和发展SMAA综合设计理论也是SMAA研究的主要问题之一。SMAA控制模型发展缓慢且工程化较难,以往建立的控制模型均来自材料领域,与系统控制的目标不能很好地匹配,因此发展适合工程的控制模型也尤为重要。SMAA的控制策略能够有效解决非线性迟滞问题,但目前并没有统一的控制方法,控制领域的学者正在尝试各种不同的控制方法在SMAA上的运用。
(2)工程应用问题。主要包括综合设计理论中设计要求、设计规范和设计方法等问题。工程师在设计执行器之前需要深入分析设计需求,准确确定SMAA功能、性能、力学环境和热环境的需求,确定设计目标。设计规范中应准确选用合适的材料、动作机构、设计类型以及加热和控制方式等。设计方法中要综合运用多学科的理论设计分析工具,最终还要进行仿真和样机的测试评估以及优化等过程。
另外,SMAA的工程应用领域也需要进一步拓展,如执行传感一体化执行器、微机电和微系统等领域。
SMAA未来发展主要围绕新材料、新理论和新应用展开:
(1)新材料。目前针对SMA材料的研究和发展已经取得了不错的成果,但未来新型SMA材料需要进一步研制和改进,如提高SMA的力学特性、机械特性、工作寿命和工作温度范围,如通过改变材料成分和添加其他元素提高SMA的相变温度,改善热处理或通过其他处理方法改善SMA的驱动性能和寿命。也可开展SMA与其他材料复合材料的研究,实现不同材料的优势互补,增强形状记忆复合材料的性能和功能。另外,发展形状记忆材料薄膜技术将有利于SMA在微机电系统的应用,能够推动在SMA在微机电领域的应用。
(2)新理论。SMAA在高温、多轴载荷以及微机电微系统中的应用,应该考虑循环加载、蠕变、多轴载荷、跨尺度和多维本构模型的建立,新的模型将有助于SMA在工程中的应用,并有利于工程设计过程中仿真阶段的精确建模仿真,提高SMAA工程实现的可靠性和快速性。需要针对SMAA的非线性迟滞特性继续发展SMAA的控制策略,以满足SMAA控制中稳定性、快速性、准确性和鲁棒性的控制性能和多应用场景的需求。本体设计理论应该发展出统一的综合设计理论,发展正式的指导方针和相关的设计工具,如数据库和可靠有效的仿真 模型。
(3)新应用。汽车和航空航天领域可以继续发展自愈合、自传感结构和元件(如智能轮胎和安全气囊)、可变形结构、高温执行器、主动噪声抑制结构和旋转执行器等。机器人领域可以继续发展微型快速高效稳定精确的执行器、仿生机器人、仿人机器人和软体机器人等。生物医疗领域可以继续发展微创手术器械和辅助康复治疗设备等。信息电子产品中可以继续发展微型相机防抖对焦执行器,可以结合视觉反馈设计视觉伺服反馈装置,另外可以将SMA应用于传感器、执行传感一体化执行器、微型驱动和微型机电系统中,将扩宽SMA的应用范围和领域,并充分发挥出SMA材料优势。
传统基于电磁式的驱动技术已日趋成熟,而基于智能材料的驱动技术具有全新的原理、概念和特性,如SMAA技术在某些领域和应用场景下具有高功率密度、高性能、高精度和低成本的优势,工程应用前景和潜力巨大,虽然SMAA技术被学界广泛关注和研究,文章专利数量逐年递增,同时在航空航天、机器人、生物医疗、汽车自动化和信息电子产品中已经逐步开始得到了应用,但其完整的设计理论并未形成。SMAA的理论分析和综合设计涉及多学科的交叉和融合,主要涉及材料学、机械学、热力学、力学、微电子、电力电子、控制理论和信号检测与处理等技术的理论分析方法和综合运用,迫切需要发展出一套综合设计理论,能够从设计需求→设计规范→设计理论计算→仿真验证→实物测试评估→设计优化→最终产品。本文系统性地总结归纳了SMAA的发展历程、基本特性、应用研究现状、理论研究现状、亟需解决的关键问题以及未来发展方向,并初步探索了SMAA综合设计理论,能够为今后SMAA领域的研究提供较全面的参考。
参考文献
[1] Willaim S, Javed H. Foundations of materials science and engineering[M]. New York: McGraw-Hill Education, 2019.
[2] Thompson B S, Gandhi M V, Kasiviswanathan S. An introduction to smart materials and structures[J]. Materials & Design, 1992, 13(1): 3-9.
[3] Joselle M M, Brian R D, Timothy J W. Materials as machines[J]. Advanced Materals, 2020, 32(20): 1-48.
[4] Sinapius J M. Adaptronics-smart structures and materials[M]. Berlin: Springer, 2021.
[5] Yang Xiufeng, Chang Longlong, Pérez-Arancibia N O. An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle[J]. Science Robotics, 2020, 5(45): eaba0015.
[6] 杨凯, 辜承林. 基于SMA弹簧紧凑型柔性电机的设计与研制[J]. 电工技术学报, 2010, 25(4): 59-64.
Yang Kai, Gu Chenglin. Research on a compact and flexible actuator consisting of SMA springs[J]. Transactions of China Electrotechnical Society, 2010, 25(4): 59-64.
[7] Zhang Jun, Sheng Jun, O’Neill C T, et al. Robotic artificial muscles: current progress and future perspectives[J]. IEEE Transactions on Robotics, 2019, 35(3): 761-781.
[8] 杨凯, 辜承林, 严新荣. 基于内嵌式SMA电机的柔性机械手研制[J]. 中国电机工程学报, 2002, 22(12): 74-79.
Yang Kai, Gu Chenglin, Yan Xinrong. A flexible robot hand with embedded SMA actuators[J]. Pro- ceedings of the CSEE, 2002, 22(12): 74-79.
[9] Hwang D, Higuchi T. A planar wobble motor with a XY compliant mechanism driven by shape memory alloy[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(1): 302-315.
[10] Elahinia M H. Shape memory alloy actuators: design, fabrication, and experimental evaluation[M]. https:// searchworks.stanford.edu/view/11959186.
[11] Olander A. An electrochemical investigation of solid cadmium-gold alloys[J]. Journal of the American Chemical Society, 1932, 54(10): 3819-3833.
[12] Chang L C, Read T A. Plastic deformation and diffusionless phase changes in metals-the gold- cadmium beta phase[J]. JOM, 1951, 3(1): 47-52.
[13] Buehler W J, Gilfrich J V, Wiley R C. Effect of low- temperature phase changes on the mechanical pro- perties of alloys near composition TiNi[J]. Journal of Applied Physics, 1963, 34(5): 1475-1477.
[14] Wang F E, Buehler W J, Pickart S J. Crystal structure and a unique “Martensitic” transition of TiNi[J]. Journal of Applied Physics, 1965, 36(10): 3232-3239.
[15] Kauffman G B, Mayo I. The story of nitinol: the serendipitous discovery of the memory metal and its applications[J]. The Chemical Educator, 1997, 2(2): 1-21.
[16] Andreasen G F, Hilleman T B. An evaluation of 55 cobalt substituted nitinol wire for use in ortho- dontics[J]. The Journal of the American Dental Association, 1971, 82(6): 1373-1375.
[17] 吴佳俊. 形状记忆合金平面涡卷式回转驱动器的研究[D]. 南京: 南京航空航天大学, 2014.
[18] Hartl D J, Lagoudas D C. Aerospace applications of shape memory alloys[J]. Proceedings of the Institu- tion of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2007, 221(4): 535-552.
[19] Mohd Jani J, Leary M, Subic A, et al. A review of shape memory alloy research, applications and opportunities[J]. Materials & Design, 2014, 56: 1078- 1113.
[20] Rodrigue H, Wang Wei, Han M W, et al. An overview of shape memory alloy-coupled actuators and robots[J]. Soft Robotics, 2017, 4(1): 3-15.
[21] Ma J, Karaman I, Noebe R D. High temperature shape memory alloys[J]. International Materials Reviews, 2010, 55(5): 257-315.
[22] 鲁军, 王凤翔. 磁控形状记忆合金旋转执行器研究[J]. 中国电机工程学报, 2008, 28(33): 115-120.
Lu Jun, Wang Fengxiang. Study on rotating actuator of magnetically controlled shape memory alloy[J]. Proceedings of the CSEE, 2008, 28(33): 115-120.
[23] Lu Yifan, Zhang Rongru, Xu Ye, et al. Resistance characteristics of SMA actuator based on the variable speed phase transformation constitutive model[J]. Materials (Basel, Switzerland), 2020, 13(6): 1479.
[24] Tzou H S, Anderson G L, Natori M C. Active structure, devices, and systems[M]. Singapore: World Science Publishing Company, 1997.
[25] Sreekanth M, Mathew A T, Vijayakumar R. A novel model-based approach for resistance estimation using rise time and sensorless position control of sub- millimetre shape memory alloy helical spring actuator[J]. Journal of Intelligent Material Systems and Structures, 2018, 29(6): 1050-1064.
[26] Lexcellent C. Shape-memory alloys handbook[M]. London: Iste, 2013.
[27] 汪菲菲. 基于形状记忆合金驱动的热电转换装置的结构设计与试验研究[D]. 长春: 吉林大学, 2020.
[28] Lagoudas D C. Shape memory alloys: modeling and engineering applications[M]. New York: Springer, 2008.
[29] Kode V R C, Cavusoglu M C. Design and chara- cterization of a novel hybrid actuator using shape memory alloy and dc micromotor for minimally invasive surgery applications[J]. IEEE/ASME Transa- ctions on Mechatronics, 2007, 12(4): 455-464.
[30] 王剑, 白洋, 郭吉丰. 旋转-直线型两自由度超声波电机建模与设计[J]. 电工技术学报, 2013, 28(11): 48-53.
Wang Jian, Bai Yang, Guo Jifeng. Modeling and optimal design of the rotary-linear type two- degree-of-freedom ultrasonic motors[J]. Transactions of China Electrotechnical Society, 2013, 28(11): 48-53.
[31] 程明,林明耀,花为. 微特电机及系统[M]. 2版. 北京: 中国电力出版社, 2014.
[32] Mohd Jani J, Leary M, Subic A. Designing shape memory alloy linear actuators: a review[J]. Journal of Intelligent Material Systems and Structures, 2017, 28(13): 1699-1718.
[33] Yuan Han, Fauroux J C, Chapelle F, et al. A review of rotary actuators based on shape memory alloys[J]. Journal of Intelligent Material Systems and Structures, 2017, 28(14): 1863-1885.
[34] Otsuka K, Wayman C M. Shape memory mate- rials[M]. New York: Cambridge University Press, 1998.
[35] Ikuta K. Micro/miniature shape memory alloy actu- ator[C]//Proceedings IEEE International Conference on Robotics and Automation,Cincinnati, OH, USA, 1990: 2156-2161.
[36] Mavroidis C. Development of advanced actuators using shape memory alloys and electrorheological fluids[J]. Research in Nondestructive Evaluation, 2002, 14(1): 1-32.
[37] Constantinos M, Pfeiffer C, Mosley M. Conventional actuators, shape memory alloys and electrorheological fluids[J]. Automation, Miniature Robotics and Sensors for Non-Destructive Testing and Evaluation, 2000, 4(3): 189-199.
[38] Zhang Daohui, Zhao Xingang, Han Jianda, et al. Active modeling and control for shape memory alloy actuators[J]. IEEE Access, 7: 162549-162558.
[39] Fosness E, Peffer A, Denoyer K. Overview of spacecraft deployment and release devices efforts at the air force research laboratory[C]//Space 2000, Albuquerque, New Mexico, USA, 2000: 312-315.
[40] Bellini A, Colli M, Dragoni E. Mechatronic design of a shape memory alloy actuator for automotive tumble flaps: a case study[J]. IEEE Transactions on Industrial Electronics, 2009, 56(7): 2644-2656.
[41] Hwang D, Ihn Y S, Kim K. Compact modular cycloidal motor with embedded shape memory alloy wires[J]. IEEE Transactions on Industrial Electronics, 2018, 65(5): 4028-4038.
[42] Yang Hao, Xu Min, Li Weihua, et al. Design and implementation of a soft robotic arm driven by SMA coils[J]. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6108-6116.
[43] Fei Yanqiong, Xu Hongwei. Modeling and motion control of a soft robot[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1737-1742.
[44] Yang Kai. Research and application of new inserted shape memory alloy actuators[J]. IEEE Transactions on Industrial Electronics, 2010, 57(8): 2845-2850.
[45] Reinventing the Wheel-NASA[EB/OL]. [2022-9-28]. https://www.nasa.gov/specials/wheels/.
[46] Abeyaratne R, Knowles J K. On the driving traction acting on a surface of strain discontinuity in a continuum[R]. Defense Technical Information Center, 1988.
[47] Patoor E, Eberhardt A, Berveiller M. Micro- mechanical modelling of superelasticity in shape memory alloys[J]. Le Journal De Physique IV, 1996, 6(C1): 277.
[48] Sun Qingping, Hwang K C. Micromechanics model- ling for the constitutive behavior of polycrystalline shape memory alloys-I. derivation of general relations[J]. Journal of the Mechanics and Physics of Solids, 1993, 41(1): 1-17.
[49] Sun Qingping, Hwang K C. Micromechanics model- ling for the constitutive behavior of polycrystalline shape memory alloys-II. study of the individual phenomena[J]. Journal of the Mechanics and Physics of Solids, 1993, 41(1): 19-33.
[50] Huang M, Gao Xiujie, Brinson L C. A multivariant micromechanical model for SMAs part 2: polycrystal model[J]. International Journal of Plasticity, 2000, 16(10-11): 1371-1390.
[51] Tanaka K, Nagaki S. A thermomechanical description of materials with internal variables in the process of phase transitions[J]. Ingenieur-Archiv, 1982, 51(5): 287-299.
[52] Liang Chen, Rogers C. One-dimensional thermo- mechanical constitutive relations for shape memory materials[C]//31st Structures, Structural Dynamics and Materials Conference, Long Beach, CA, 1990: 1027.
[53] Brinson L C. One-dimensional constitutive behavior of shape memory alloys: thermomechanical derivation with non-constant material functions and redefined martensite internal variable[J]. Journal of Intelligent Material Systems and Structures, 1993, 4(2): 229-242.
[54] Elahinia M H, Ahmadian M. An enhanced SMA phenomenological model: II. the experimental study[J]. Smart Materials and Structures, 2005, 14(6): 1309- 1319.
[55] Lagoudas D C, Bo Zhonghe, Qidwai M A. A unified thermodynamic constitutive model for SMA and finite element analysis of active metal matrix composites[J]. Mechanics of Composite Materials and Structures, 1996, 3(2): 153-179.
[56] Al Janaideh M, Rakheja S, Su Chunyi. An analytical generalized Prandtl-ishlinskii model inversion for hysteresis compensation in micropositioning con- trol[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(4): 734-744.
[57] Xu Rui, Zhou Miaolei. Elman neural network-based identification of krasnosel's kii-pokrovskii model for magnetic shape memory alloys actuator[J]. IEEE Transactions on Magnetics, 2017, 53(11): 1-4.
[58] Hu H, Ben Mrad R. On the classical Preisach model for hysteresis in piezoceramic actuators[J]. Mechatro- nics, 2003, 13(2): 85-94.
[59] Elahinia M H, Ashrafiuon H. Nonlinear control of a shape memory alloy actuated manipulator[J]. Journal of Vibration and Acoustics, 2002, 124(4): 566-575.
[60] Nikdel N, Nikdel P, Badamchizadeh M A, et al. Using neural network model predictive control for con- trolling shape memory alloy-based manipulator[J]. IEEE Transactions on Industrial Electronics, 2014, 61(3): 1394-1401.
[61] Lan C C, Fan C H. An accurate self-sensing method for the control of shape memory alloy actuated flexures[J]. Sensors and Actuators A: Physical, 2010, 163(1): 323-332.
[62] Lee S H, Kim S W. Improved position control of shape memory alloy actuator using the self-sensing model[J]. Sensors and Actuators A: Physical, 2019, 297: 111529.
[63] Shi Zhenyun, Tian Jiawen, Luo Ruidong, et al. Multifeedback control of a shape memory alloy actuator and a trial application[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(7): 1106-1119.
[64] Jiles D C, Atherton D L. Theory of ferromagnetic hysteresis (invited)[J]. Journal of Applied Physics, 1984, 55(6): 2115-2120.
[65] Nguyen B K, Ahn K K. Feedforward control of shape memory alloy actuators using fuzzy-based inverse preisach model[J]. IEEE Transactions on Control Systems Technology, 2009, 17(2): 434-441.
[66] Tan U X, Latt W T, Shee C Y, et al. Feedforward controller of ill-conditioned hysteresis using singularity- free Prandtl-ishlinskii model[J]. IEEE/ASME Transa- ctions on Mechatronics: a Joint Publication of the IEEE Industrial Electronics Society and the ASME Dynamic Systems and Control Division, 2009, 14(5): 598-605.
[67] Wang Y. Methods for modeling and control of systems with hysteresis of shape memory alloy actuators[M]. Montreal: Concordia University, 2007.
[68] Ren Beibei, San P P, Ge S S, et al. Adaptive dynamic surface control for a class of strict-feedback nonlinear systems with unknown backlash-like hysteresis[C]// IEEE American Control Conference, St Louis, MO, USA, 2009: 4482-4487.
[69] Feng Ying, Rabbath C A, Su Chunyi. Inverse duhem model based robust adaptive control for flap positioning system with SMA actuators[J]. IFAC Proceedings Volumes, 2011, 44(1): 8126-8131.
[70] Mishra S K, Gur S, Roy K, et al. Response of bridges isolated by shape memory-alloy rubber bearing[J]. Journal of Bridge Engineering, 2016, 21(3): 4015071.1- 4015071.15.
[71] Tharayil M L, Alleyne A G. Modeling and control for smart Mesoflap aeroelastic control[J]. IEEE/ASME Transactions on Mechatronics, 2004, 9(1): 30-39.
[72] Shameli E, Alasty A, Salaarieh H. Stability analysis and nonlinear control of a miniature shape memory alloy actuator for precise applications[J]. Mechatro- nics, 2005, 15(4): 471-486.
[73] Joseph F O M, Kumar M, Franz K, et al. Control of shape memory alloy actuated flexible needle using multimodal sensory feedbacks[J]. Journal of Auto- mation and Control Engineering, 2015, 3(5): 428-434.
[74] Martineau S, Burnham K J, Haas O C L, et al. Four-term bilinear PID controller applied to an industrial furnace[J]. Control Engineering Practice, 2004, 12(4): 457-464.
[75] Grant D, Hayward V. Variable structure control of shape memory alloy actuators[J]. IEEE Control Systems Magazine, 1997, 17(3): 80-88.
[76] Elahinia M H, Seigler T M, Leo D J, et al. Nonlinear stress-based control of a rotary SMA-actuated mani- pulator[J]. Journal of Intelligent Material Systems and Structures, 2004, 15(6): 495-508.
[77] Tai N T, Ahn K K. Output feedback direct adaptive controller for a SMA actuator with a Kalman filter[J]. IEEE Transactions on Control Systems Technology, 2012, 20(4): 1081-1091.
[78] Silva A F C, da Silva S A, dos Santos A J V, et al. Fuzzy control of a robotic finger actuated by shape memory alloy wires[J]. Journal of Dynamic Systems, Measurement, and Control, 2018, 140(6): 064502.
[79] Li Junfeng, Tian Huifang. Position control of SMA actuator based on inverse empirical model and SMC-RBF compensation[J]. Mechanical Systems and Signal Processing, 2018, 108: 203-215.
[80] Kinitic automation[EB/OL]. [2021-12-4]. https://www. Kiniticsautomation. com/.
[81] Miga motor[EB/OL]. [2021-12-4]. https://www.migaro- botics.com/.
[82] Kim Y, Cheng S S, Desai J P. Active stiffness tuning of a spring-based continuum robot for MRI-guided neurosurgery[J]. IEEE Transactions on Robotics, 2018, 34(1): 18-28.
[83] Zhakypov Z, Huang Jianlin, Paik J. A novel torsional shape memory alloy actuator: modeling, characteri- zation, and control[J]. IEEE Robotics & Automation Magazine, 2016, 23(3): 65-74.
[84] Hwang D, Higuchi T. A rotary actuator using shape memory alloy (SMA) wires[J]. IEEE/ASME Transa- ctions on Mechatronics, 2014, 19(5): 1625-1635.
[85] Zhang X Y, Yan X J. Continuous rotary motor actuated by multiple segments of shape memory alloy wires[J]. Journal of Materials Engineering and Performance, 2012, 21(12): 2643-2649.
[86] 李瑞. 形状记忆合金柔性驱动器的特性分析与控制研究[D]. 广州: 华南理工大学, 2019.
[87] Kudva J N. Overview of the DARPA smart wing project[J]. Journal of Intelligent Material Systems and Structures, 2004, 15(4): 261-267.
[88] Oehler S D, Hartl D J, Lopez R, et al. Design optimization and uncertainty analysis of SMA morphing structures[J]. Smart Materials and Stru- ctures, 2012, 21(9): 094016.
[89] Pitt D M, Dunne J P, White E V, et al. Wind tunnel demonstration of the SAMPSON smart inlet[C]// SPIE's 8th Annual International Symposium on Smart Structures and Materials. Proc SPIE 4332, Smart Structures and Materials 2001: Industrial and Com- mercial Applications of Smart Structures Tech- nologies, Newport Beach, CA, USA, 2001: 345-356.
[90] Peffer A, Denoyer K, Fosness E, et al. Development and transition of low-shock spacecraft release devices[C]//IEEE Aerospace Conference, Big Sky, MT, USA, 2000: 277-284.
[91] Nava N, Collado M, Cabás R. New deployment mechanisms based on SMA technology for space applications[C]//15th European Space Mechanisms & Tribology Symposium, Netherland, 2013: 1-6.
[92] James M Conrad. Controlled making a truly auto- nomous robot[M]. New Jersey: IEEE Wiley, 2005.
[93] Seok S, Onal C D, Cho K J, et al. Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(5): 1485-1497.
[94] Noh M, Kim S W, An S, et al. Flea-inspired catapult mechanism for miniature jumping robots[J]. IEEE Transactions on Robotics, 2012, 28(5): 1007-1018.
[95] Wang Zhenlong, Wang Yangwei, Li Jian, et al. A micro biomimetic manta ray robot fish actuated by SMA[C]//IEEE International Conference on Robotics and Biomimetics, Guilin, China, 2009: 1809-1813.
[96] Wolfe T B, Faulkner M G, Wolfaardt J. Development of a shape memory alloy actuator for a robotic eye prosthesis[J]. Smart Materials and Structures, 2005, 14(4): 759-768.
[97] Yoneyama T, Miyazaki S, Miyazaki S, et al. Shape memory alloys for biomedical applications[M]. Sawston: Woodhead Publishing, 2009.
[98] Sheng Jun, Wang Xuefeng, Dickfeld T M L, et al. Towards the development of a steerable and MRI- compatible cardiac catheter for atrial fibrillation treatment[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4038-4045.
[99] Sheng Jun, Gandhi D, Gullapalli R, et al. Develop- ment of a meso-scale SMA-based torsion actuator for image-guided procedures[J]. IEEE Transactions on Robotics: A Publication of the IEEE Robotics and Automation Society, 2017, 33(1): 240-248.
[100] Kim B, Lee S, Park J H, et al. Design and fabrication of a locomotive mechanism for capsule-type endos- copes using shape memory alloys (SMAs)[J]. IEEE/ASME Transactions on Mechatronics, 2005, 10(1): 77-86.
[101] Salerno M, Zhang Ketao, Menciassi A, et al. A novel 4-DOF origami grasper with an SMA-actuation system for minimally invasive surgery[J]. IEEE Transactions on Robotics, 2016, 32(3): 484-498.
[102] Jayatilake D, Isezaki T, Teramoto Y, et al. Robot assisted physiotherapy to support rehabilitation of facial paralysis[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(3): 644-653.
[103] 冯晓彬. 形状记忆合金丝驱动的手指康复机器人设计和分析[D]. 秦皇岛: 燕山大学, 2019.
[104] Luchetti T, Zanella A, Biasiotto M, et al. Electrically actuated antiglare rear-view mirror based on a shape memory alloy actuator[J]. Journal of Materials Engin- eering and Performance, 2009, 18(5/6): 717-724.
[105] Neugebauer R, Bucht A, Pagel K, et al. Numerical simulation of the activation behavior of thermal shape memory alloys[C]//Industrial and Commercial Appli- cations of Smart Structures Technologies, San Diego, California, USA, 2010: 847594.
[106] Jalali M S, Mahanfar A, Menon C, et al. Recon- figurable axial-mode helix antennas using shape memory alloys[J]. IEEE Transactions on Antennas and Propagation, 2011, 59(4): 1070-1077.
[107] Mazlouman S J, Mahanfar A, Menon C, et al. Square ring antenna with reconfigurable patch using shape memory alloy actuation[J]. IEEE Transactions on Antennas and Propagation, 2012, 60(12): 5627- 5634.
[108] Velazquez R, Pissaloux E E, Hafez M, et al. Tactile rendering with shape-memory-alloy pin-matrix[J]. IEEE Transactions on Instrumentation and Measure- ment, 2008, 57(5): 1051-1057.
[109]Cambridge mechatronics[EB/OL]. [2021-12-4]. https:// www.Cambridge mechatronics.com/.
A Review of the Research on Shape Memory Alloy Actuators
Abstract Shape memory alloys (SMAs) belong to the family of smart materials, which have the characteristics of shape memory effect (SME), superelasticity (SE), high damping, self-sensing, and biocompatibility. Shape memory alloy actuators (SMAAs) have the characteristics of high power- to-weight ratio, high strain stress, high driving frequency, and high design freedom, which are used in aerospace, robotics, biomedical, automotive automation, and information electronics. Actuators based on shape memory alloy are currently one of the most interesting research topics. Compared with traditional technologies based on electromagnetic, pneumatic, and hydraulic principles, SMAAs have the advantages of high power density, high precision, and low cost in some fields and application scenarios. However, multidisciplinary theoretical analysis and design ideas involve SMAA ontology design, system modeling, and control strategy, which makes it difficult to develop SMAA comprehensive design theory. This paper not only provides a review of recent SMAA research and commercial applications, but also explores SMAA comprehensive design theory. Key issues and future developments of SMAA research are discussed, which provides detailed references for researchers in SMAA-related fields.
keywords:Shape memory alloy actuators, theoretical research, applied research, design theory, key issues
DOI: 10.19595/j.cnki.1000-6753.tces.211043
中图分类号:TM301
黑龙江省自然科学基金资助项目(LH2020E050)。
收稿日期 2021-07-12
改稿日期 2021-11-30
徐殿国 男,1960年生,教授,博士生导师,研究方向为电力电子技术和电机与传动控制技术。E-mail: xudiang@hit.edu.cn
张相军 男,1971年生,副教授,博士生导师,研究方向为高功率密度特种电源技术和照明电子技术。E-mail: xiangjunzh@hit.edu.cn(通信作者)
(编辑 崔文静)