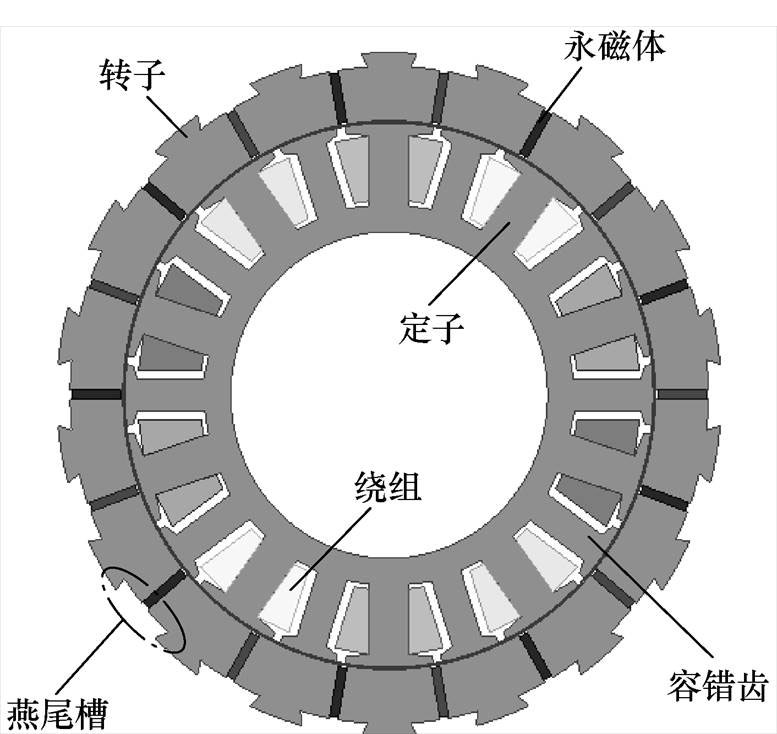
图1 轮辐式FPMM结构
Fig.1 Cross-section of spoke-type FPMM
摘要 在开路故障下,为了利用五相梯形反电动势永磁电机的3次谐波反电动势,需注入3次谐波电流。此时,静止坐标系下的容错参考电流为交流量,传统比例积分控制器由于带宽的限制,难以准确跟踪交流容错电流,维持系统的平稳运行。为此,该文提出采用无差拍电流跟踪的新型容错控制策略。首先,根据故障后转矩脉动为零的原则获取故障后的容错参考电流,使电机在故障情况下仍能输出平滑的转矩;其次,以欧拉离散的方法构建单相开路、两相开路故障状态下电机的离散模型,利用无差拍方法追踪交变的容错参考电流,为载波脉宽调制提供准确的参考电压;最后,构建驱动实验平台,实验验证所提控制策略的有效性。
关键词:五相永磁电机 梯形反电动势 开路故障 交变电流 无差拍
五相永磁电机(Five-phase Permanent Magnet Motor, FPMM)具有高效率、高转矩惯量比、高功率密度、质量轻、体积小等优点[1-4]。与传统三相电机相比,相数的增加,提供了更多的自由度,使得电机驱动系统拥有强容错能力。通过恰当的控制策略就能在不改变电路硬件结构的前提下实现容错运行[5-7]。在要求大功率及高可靠性的应用场合,如电动汽车、舰船电力推进、风力发电以及航空航天等领域得到了越来越多的关注和应用。
对于FPMM来说,除了人为的在气隙磁场中注入3次谐波分量[8],永磁体的加工设计误差、充磁不理想等都会使气隙中存在一定的3次谐波成分。对于含有3次谐波磁场的FPMM,通过注入特定比例的3次谐波电流,可以有效降低气隙磁通密度的峰值,提高铁心材料的利用率和电机的输出转 矩[9-10]。文献[11]提出了正常情况下的基波空间和3次谐波空间独立解耦控制,利用3次谐波电流提高了电机的输出转矩。当开路故障发生时[12-19],系统维数下降,基波空间和3次谐波空间不再解耦[20]。文献[21-22]提出3次谐波电流注入的方法使电机在故障状态下仍能平稳运行,但是需要配合额外的补偿矩阵来实现电机的解耦,增加了系统的复杂度。文献[23]以反电动势不变的原则推导了能够使电机在各自谐波空间上实现解耦的容错矩阵。文献[24]在解耦矩阵的基础上提出谐波注入式容错控制。通过注入3次谐波电流,使其产生幅值相等并且相位相反的转矩脉动来抵消由谐波磁动势产生的转矩脉动从而实现无脉动运行。然而,上述方法大多使用双闭环反馈的控制系统,需要多个PI调节器,从而使得系统结构复杂。同时,由于故障下解耦特性被打破,在同步旋转坐标系上容错参考电流将会变成交变的信号。根据内模原理,要实现对参考信号的无静差跟踪,控制器必须包括信号的模型。而比例积分(Proportional-Integral, PI)控制器内只有一个阶跃信号的内模,因此难以跟踪正弦信号,尤其当该正弦信号频率较高时,PI控制器的跟踪性能将明显下降。滞环控制能够实现对复杂参考电流的跟 踪[25],但是却存在着开关频率不固定的问题。无差拍模型预测控制由于结合了脉宽调制的控制方法,在解决交变电流跟踪问题的同时能够降低开关频率,被广泛应用于永磁电机驱动系统中[26-32]。但是现有无差拍电流跟踪方法仅用于电机正常运行,尚未被用于电机容错运行。
因此,本文针对梯形反电动势永磁电机,提出采用无差拍电流跟踪方式的容错控制,解决了容错运行下交流容错电流的跟踪难题,同时省去了电流闭环中的PI控制器、简化了系统的控制结构。本文首先根据转矩脉动为零的原则推导了多种开路状况下的容错参考电流,使电机在故障情况下也能够拥有输出平滑转矩的能力。其次提出单相、两相开路下的无差拍电流跟踪方法。最后设计五相梯形反电动势电机控制系统实验平台,实验验证了所提方法的可行性和有效性。
图1为18极20槽的轮辐式FPMM样机结构。该样机为外转子电机,永磁体幅向嵌装在转子内。图2展示了该样机的反电动势波形。对测量得到的反电动势数据进行快速傅里叶变换,得到该样机反电动势中3次谐波分量与基波分量的比值为20%。驱动FPMM的逆变电路采用了如图3所示的五相电压源型半桥逆变器。
图1 轮辐式FPMM结构
Fig.1 Cross-section of spoke-type FPMM
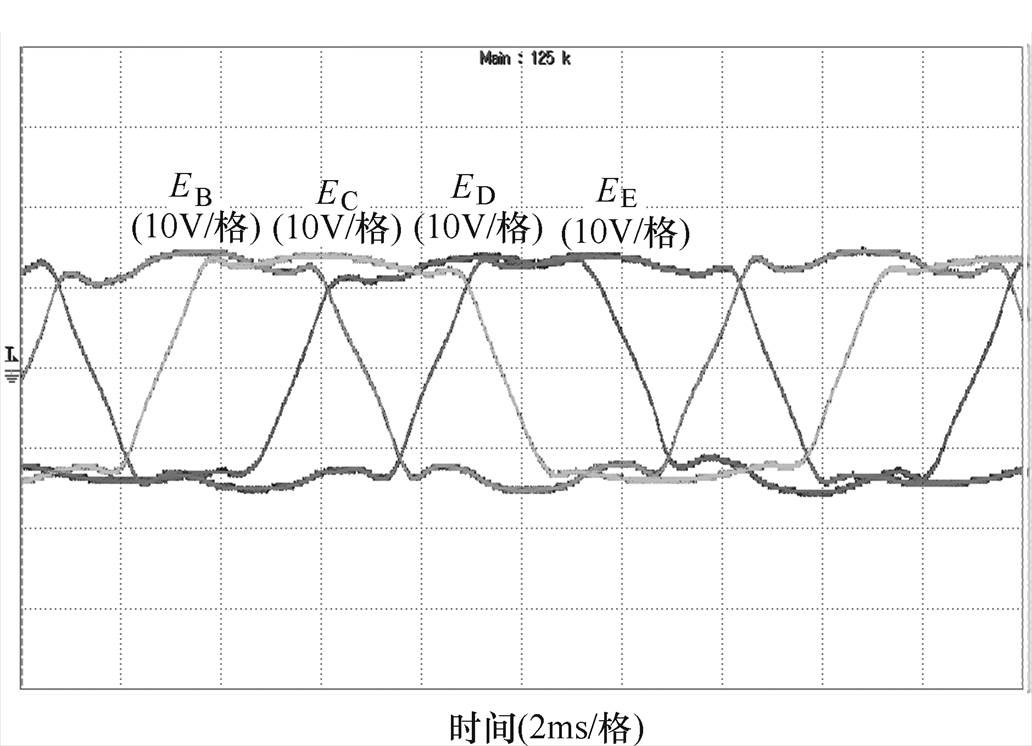
图2 轮辐式FPMM反电动势
Fig.2 Back-EMF of the spoke-type FPMM
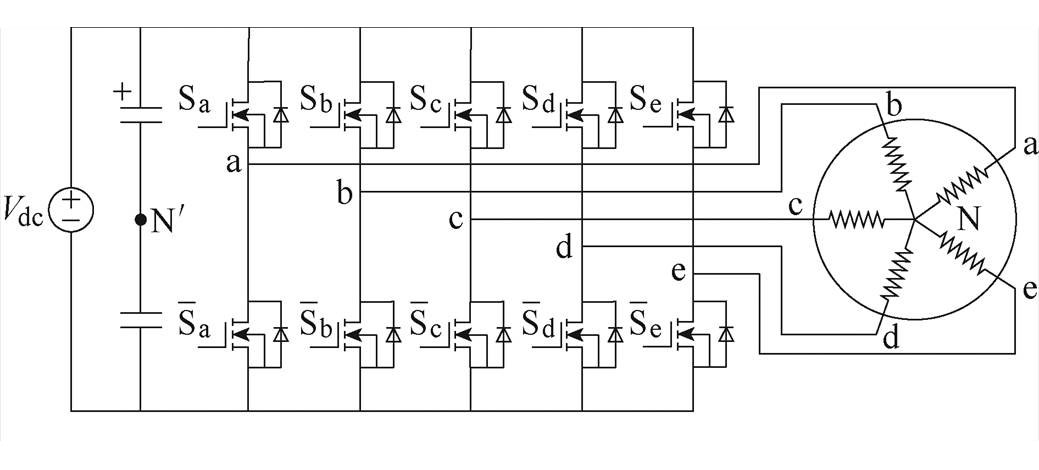
图3 五相半桥逆变器及FPMM
Fig.3 Five-phase half-bridge inverter and FPMM
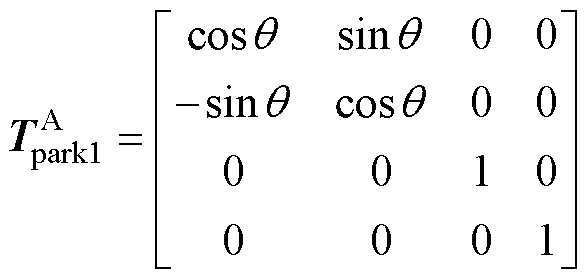
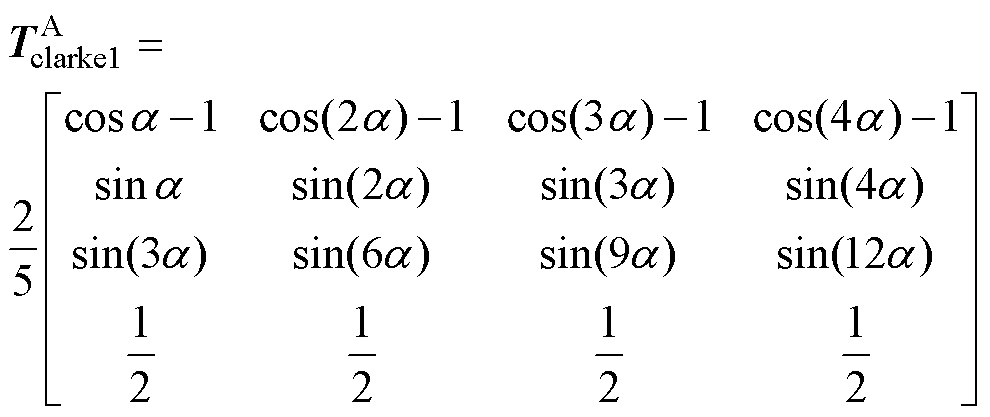
以A相开路故障为例,为了实现在故障情况下的容错控制,根据故障前后基波磁动势不变的原则重构基波降阶矩阵[23]为
 (1)
(1) (2)
(2)
 (3)
(3)
式中, 为A相开路故障后的基波空间降阶变换矩阵,能够将自然坐标系下剩余非故障相的电流变换到静止的正交坐标系中;
为A相开路故障后的基波空间降阶变换矩阵,能够将自然坐标系下剩余非故障相的电流变换到静止的正交坐标系中; 为故障后的旋转变换矩阵,可以将电机模型变换到d1、q1、z1、z0
为故障后的旋转变换矩阵,可以将电机模型变换到d1、q1、z1、z0
坐标系中;id1、iq1分别为基波旋转坐标系上的d1、q1轴电流;iz1不参与基波磁场之间的机电能量转换,可以称为基波空间上的广义零序分量;iz0为零序电流分量,对于星形绕组结构恒为0;q 为转子的位置角;a=0.4p。
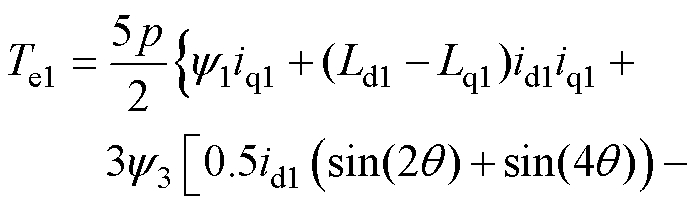
电机的电磁转矩等于电流不变时磁共能对电机机械角的偏导数,其在基波电流作用下的转矩表达式为
 (4)
(4)
式中,y1、y3分别为基波磁链幅值和3次谐波磁链幅值;p为电机极对数。
由于故障后系统的控制维数降低,基波电流与3次谐波空间之间存在耦合并产生转矩脉动。为了消除这些转矩脉动,本文将采用3次谐波电流注入的控制策略。
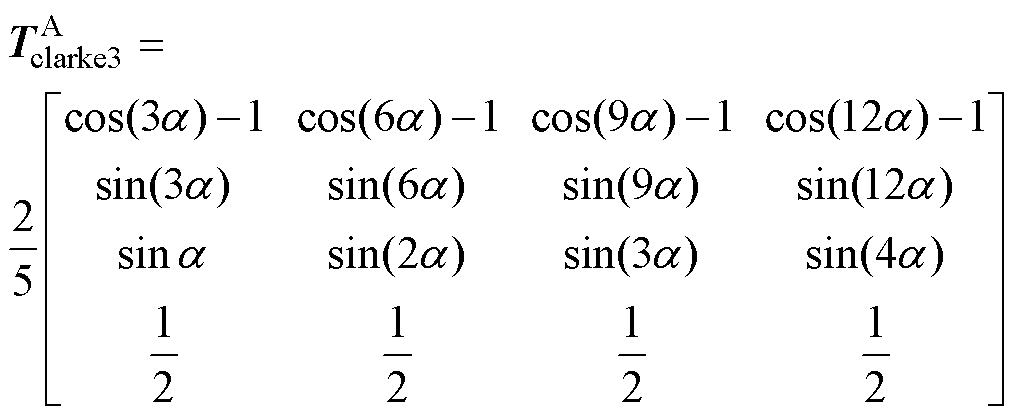
与1.1节方法类似,3次谐波空间的降阶矩阵的具体表达式[24]为
 (5)
(5) (6)
(6)
 (7)
(7)
式中, 为3次谐波空间中的静止坐标变换矩阵;
为3次谐波空间中的静止坐标变换矩阵; 为3次谐波空间中的旋转变换矩阵;故障后电机模型经过3次谐波空间变换矩阵变换到d3、q3、z3、z0坐标系中,id3、iq3为3次谐波旋转坐标系上的d3、q3轴电流;iz3为谐波空间上的广义零序分量。
为3次谐波空间中的旋转变换矩阵;故障后电机模型经过3次谐波空间变换矩阵变换到d3、q3、z3、z0坐标系中,id3、iq3为3次谐波旋转坐标系上的d3、q3轴电流;iz3为谐波空间上的广义零序分量。
由磁共能法,当施加3次谐波电流时,产生的电磁转矩表达式为
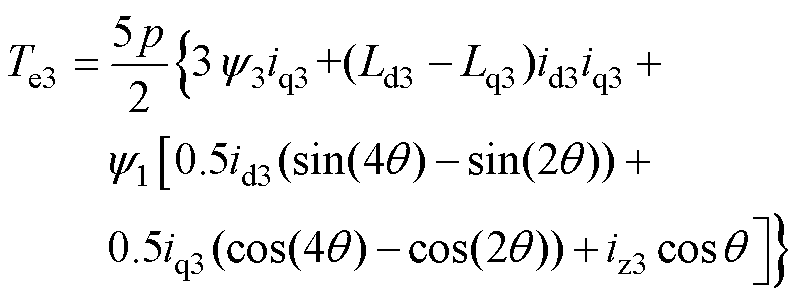 (8)
(8)通过式(4)和式(8)可以发现,当基波电流和3次谐波电流同时作用时,系统的维数增加至6。此时只要合理分配id1、id3、iq1、iq3、iz1、iz3这6个变量,就可以保证输出的转矩脉动为零,从而实现故障后的无扰容错运行。
为了能够输出平稳的转矩,需要对转矩脉动进行抑制,分析式(4)和式(8)可知,在基波电流和3次谐波电流的作用下,转矩中会产生1次、2次、3次以及4次脉动。
本文采用id=0的控制策略,使得id1=id3=0。当电流满足式(9)所示关系时,就可以抵消各个阶次的转矩脉动。
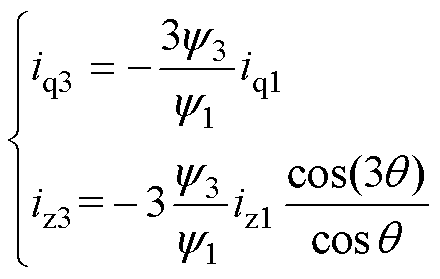 (9)
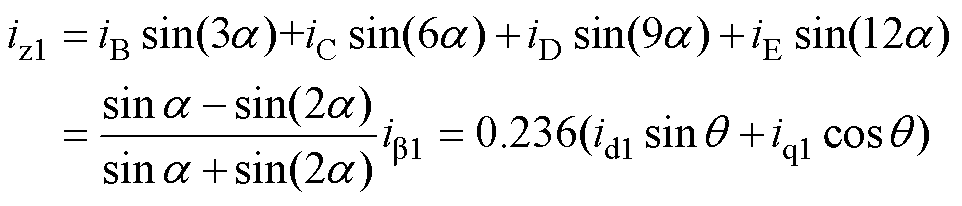
(9)此时,iq1可通过转速闭环得到。为了控制系统剩余的自由度iz1,可通过增加额外的约束条件来实现。此处,使用基波电流幅值相等的原则增加iB= -iD,iC=-iE两个条件,有
 (10)
(10)
 (11)
(11)当电流满足上述条件时,就可以实现单相开路故障下的无扰运行,其参考电流生成方法如图4所示。图中,idref、iqref、izref为合成后的容错参考电流在基波空间中的电流分量。
将式(9)和式(11)用图4所示方法进行变换,最终在自然坐标系上得到的容错电流为
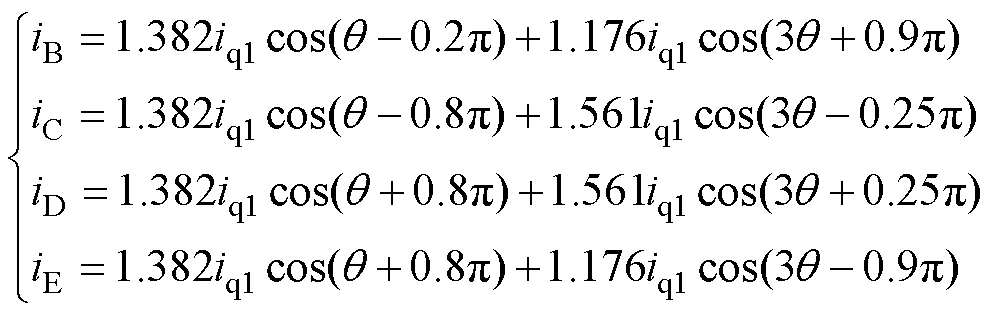 (12)
(12)式中,iq1为转速闭环后由PI控制器生成的参考电流。
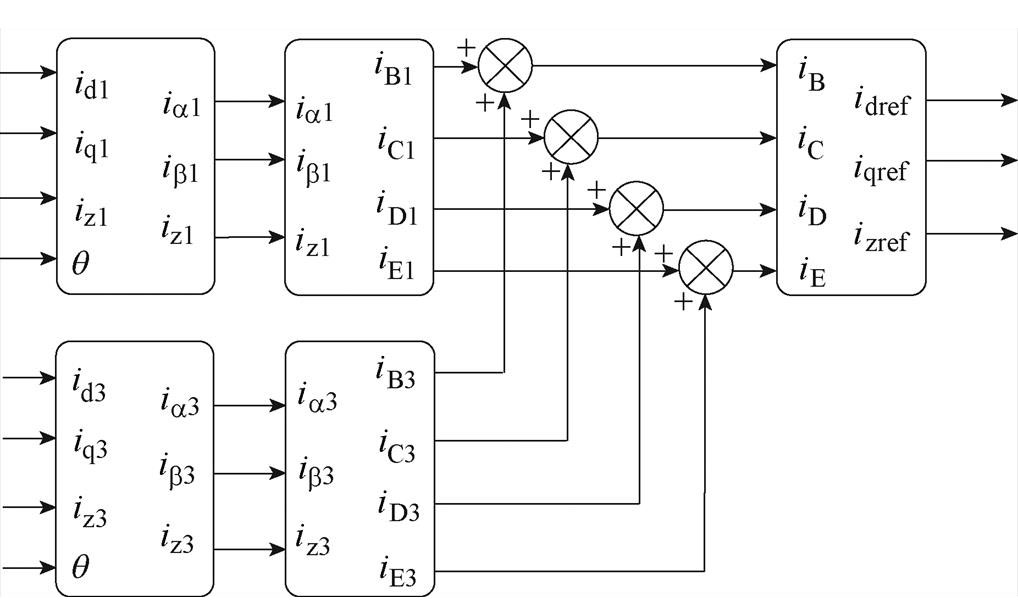
图4 A相开路容错电流生成框图
Fig.4 Block diagram of fault-tolerant current generation under A phases open-circuit
AB相发生开路故障时,根据磁链仍然保持圆形旋转的原理,可以得到故障下的矩阵表达式为
 (13)
(13)
 (14)
(14)
 (15)
(15)式中, 、
、 分别为AB相开路故障后的静止坐标变换矩阵和旋转坐标变换矩阵。
分别为AB相开路故障后的静止坐标变换矩阵和旋转坐标变换矩阵。
采用 =0的控制策略,根据降阶变化矩阵,此时AB相开路的基波容错电流为
=0的控制策略,根据降阶变化矩阵,此时AB相开路的基波容错电流为
 (16)
(16)式中, 为转速闭环后由PI控制器生成的参考电流。
为转速闭环后由PI控制器生成的参考电流。
根据磁共能法,AB相开路故障时,基波容错电流产生的转矩为
 (17)
(17)由式(17)可知,故障情况下,基波容错电流会产生与正常情况下相同的平均转矩。然而,基波电流也会和3次谐波反电动势相互作用,产生了额外的转矩脉动。针对这些由3次谐波反电动势引起的转矩脉动,可以通过3次谐波电流来抑制,现假设注入的3次谐波电流为
 (18)
(18)
式中,k1、k2、k3为3次谐波电流幅值的系数;j1、j2、j3为3次谐波电流的电流角。
根据磁共能法,可以得到3次谐波电流产生的电磁转矩,对其进行因式分解可以得到各个阶次的转矩脉动分别为
 (19)
(19)式中, 、
、 、
、 、
、 分别为A、B相开路故障时3次谐波容错电流与基波磁动势相互作
分别为A、B相开路故障时3次谐波容错电流与基波磁动势相互作
用产生的2次和4次转矩脉动的余弦分量和正弦分量。
同样地,将基波电流产生的电磁转矩式(17)进行因式分解,各个阶次的脉动分量为
 (20)
(20)式中, 、
、 、
、 和
和 分别为基波容错电流与3次谐波磁动势之间相互作用产生的2次和4次转矩脉动的余弦分量和正弦分量。
分别为基波容错电流与3次谐波磁动势之间相互作用产生的2次和4次转矩脉动的余弦分量和正弦分量。
增加中性点为零的约束条件,并且以抵消转矩脉动为目标,最终的容错电流表达式为
 (21)
(21)
当电流满足式(21)时,就可以实现AB两相开路故障下的无转矩脉动运行,其容错参考电流生成框图如图5所示。
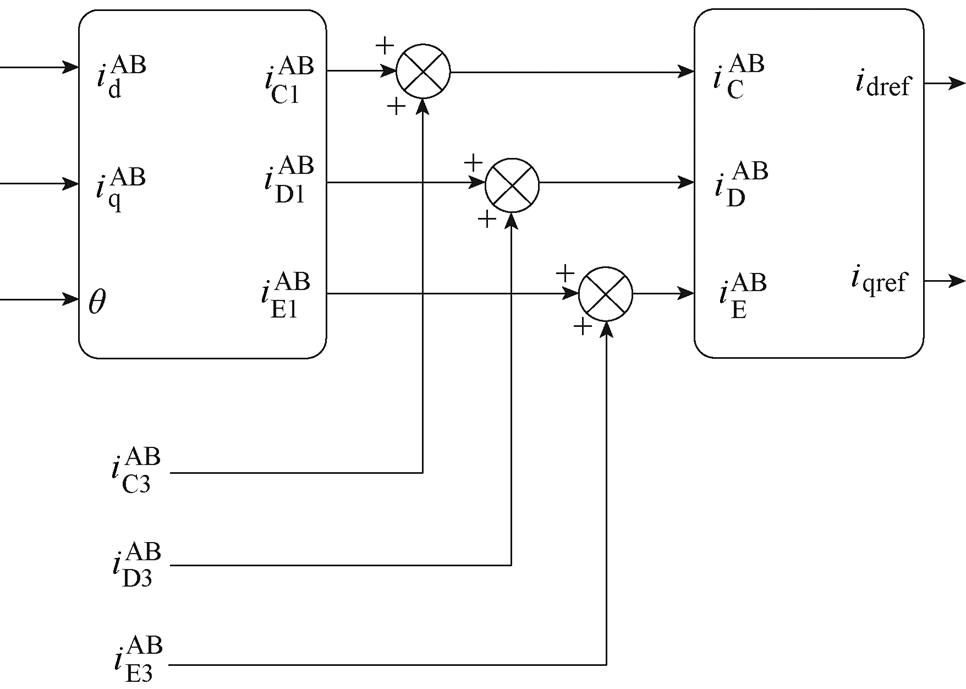
图5 AB相开路容错电流生成框图
Fig.5 Block diagram of fault-tolerant current generation under AB phases open-circuit
与AB两相开路方法类似,AC相开路时,可以得到故障下的容错矩阵表达式为
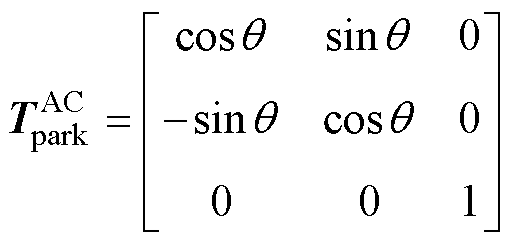 (22)
(22)
 (23)
(23) (24)
(24)式中, 、
、 分别为AC相开路故障后的静止坐标变换和旋转坐标变化。
分别为AC相开路故障后的静止坐标变换和旋转坐标变化。
与2.1节所述求解方法类似,此时要得到平滑的转矩输出,所需要的容错参考电流为
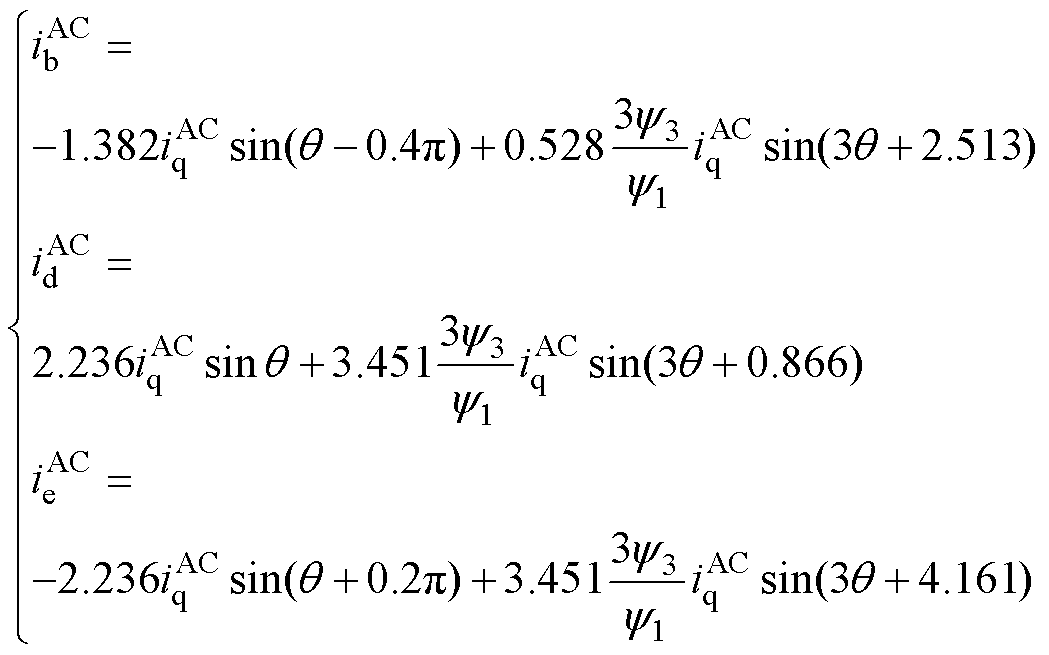 (25)
(25)此时,AC相开路的容错参考电流生成方法与图5类似。
由第2节可知,经过坐标变换,容错参考电流变换到了基波旋转空间,此时所需要跟踪的电流变成了一个交流信号。以A相开路为例,最终所需要的容错参考电流如图6所示。
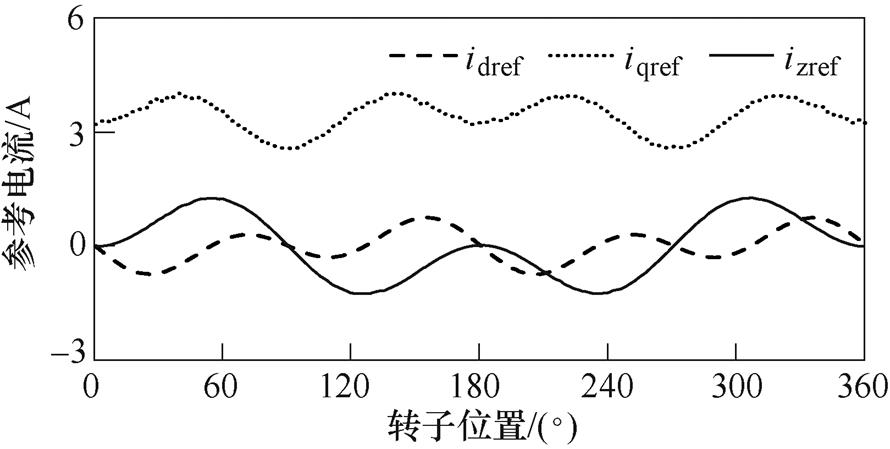
图6 A相容错下的参考电流
Fig.6 The reference of fault-tolerant current under A phases open-circuit
根据内模原理,在对交变信号跟踪时,需要在控制器内加入一个与交变信号一致的内模。此时,如果将PI控制器变为PR控制器,虽然能取得一定效果,但是PR控制器的调速范围窄。故此,本节采用无差拍电流跟踪的方法来准确追踪开路故障下的交变电流。
A相开路时,电机的定子电压方程可以表示为
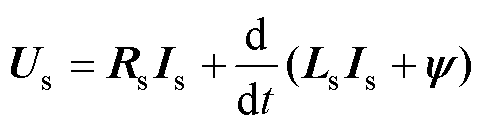 (26)
(26)式中,Us、Is分别为定子电压、电流矩阵;Rs为定子电阻矩阵;Ls为定子电感矩阵;y 为永磁磁链 矩阵。
故障后永磁磁链矩阵通过坐标变换在基波空间下的解耦表达式为
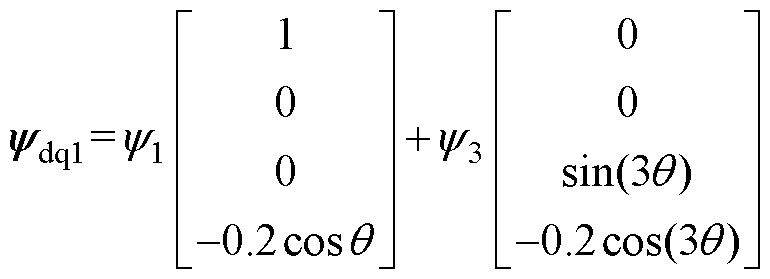 (27)
(27)电机的定子电压方程在基波空间同步旋转坐标系上的变换过程可以表示为
 (28)
(28)
将式(26)和式(27)代入式(28),忽略零序分量可得d1、q1、z1坐标系上的状态方程式为
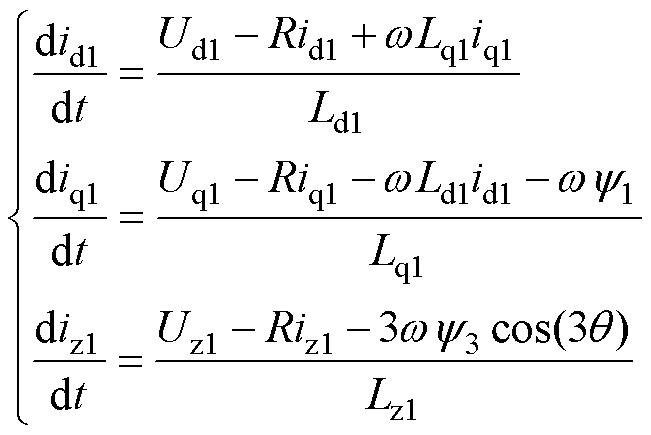 (29)
(29)式中,Ld1、Lq1、Lz1为基波空间旋转坐标系下各个坐标轴的电感分量;w 为电机旋转的电角速度。
此时,式(29)为连续的电机状态方程,利用欧拉前向离散的方法将连续的状态方程变为离散方程,有
 (30)
(30)式中,Ts为控制周期;id1(k)、iq1(k)、iz1(k)分别为当前时刻d1、q1、z1轴的电流分量;Ud1(k)、Uq1(k)、Uz1(k)分别为作用在当前控制周期内的d1、q1、z1轴电压分量;id1(k+1)、iq1(k+1)、iz1(k+1)为下一时刻的电流瞬时值。由式(30)可知,当前时刻下作用不同电压矢量会得到对应的下一时刻d1、q1、z1轴电流分量。
令下一时刻的电流等于参考电流,代入当前控制周期的电流,就能够得到当前时刻所需要的电压,写成矩阵形式为
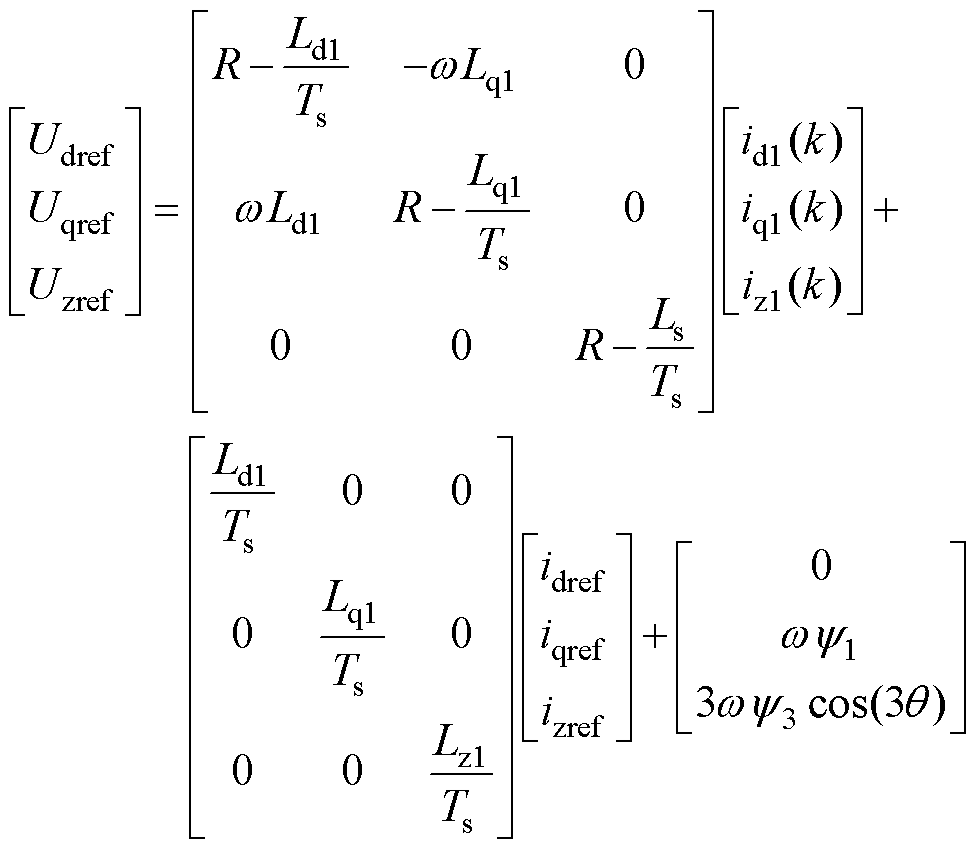 (31)
(31)将式(31)得到的电压经过旋转坐标变换,就能得到载波脉宽调制(Carrier Pulse Width Modu- lation, CPWM)控制所需要的静止坐标系上的参考电压。此时,系统的控制框图如图7所示。
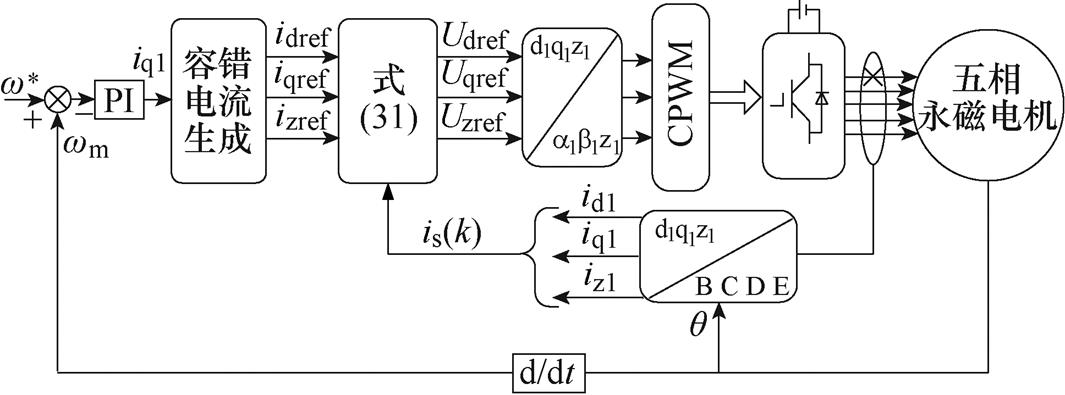
图7 无差拍电流跟踪的A相开路容错系统控制框图
Fig.7 Block diagram of proposed fault tolerant control under A phase open-circuit
无差拍电流跟踪技术的关键是利用欧拉离散的方法将连续的电机状态方程转换成离散模型[33],并且令下一时刻的预测电流等于参考电流,此时只需要结合当前时刻的实际采样电流,就能得到当前控制周期上最优的参考电压矢量。此方法既能解决传统PI控制器无法追踪交变信号的问题,同时还有着动态响应块、开关频率固定、易于实现等优点。
与A相开路类似,分别将AB、AC开路故障下的永磁磁链经由式(13)和式(14)、式(22)和式(23)变换到dq坐标系中,并代入定子电压方程式(26)。整理后的电压离散矩阵分别为

 (32)
(32)
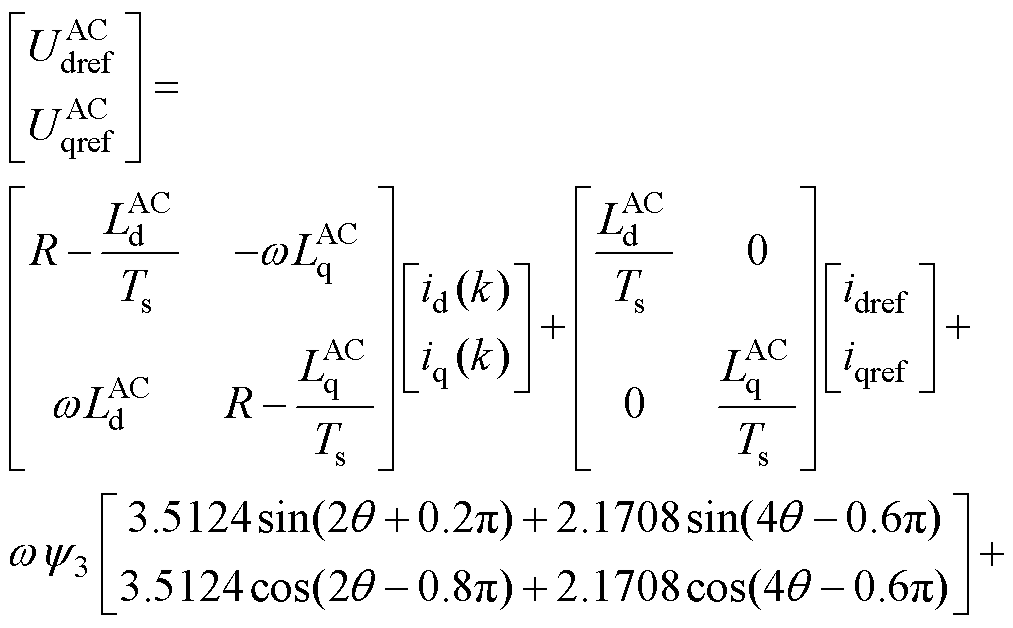
 (33)
(33)当容错参考电流经过此离散矩阵,就能够生成对应的电压参考值,再通过旋转坐标变换就能够得到静止坐标系上CPWM所需要的容错参考电压,从而实现电机两相开路故障状态下的无扰运行。
为了验证理论分析的有效性,搭建如图8所示的实验平台。实验平台包括FPMM、五相电压源型半桥逆变器和作为负载的磁粉制动器。利用dSPACE1005控制器实现整体控制算法以及信号采集。电机参数见表1。电机转矩由高精度转矩传感器(HBMT20WN/20NM)测得。IGBT的频率固定为10kHz,电流采样频率为10kHz,母线电压为50V。
表1 样机参数
Tab.1 Parameters of prototype machine

参 数数 值 永磁体极对数9 基波永磁磁链/Wb0.041 1 3次谐波永磁磁链/Wb0.003 3 相电阻/W0.52 d轴电感值/mH0.932 3 q轴电感值/mH1.261 4
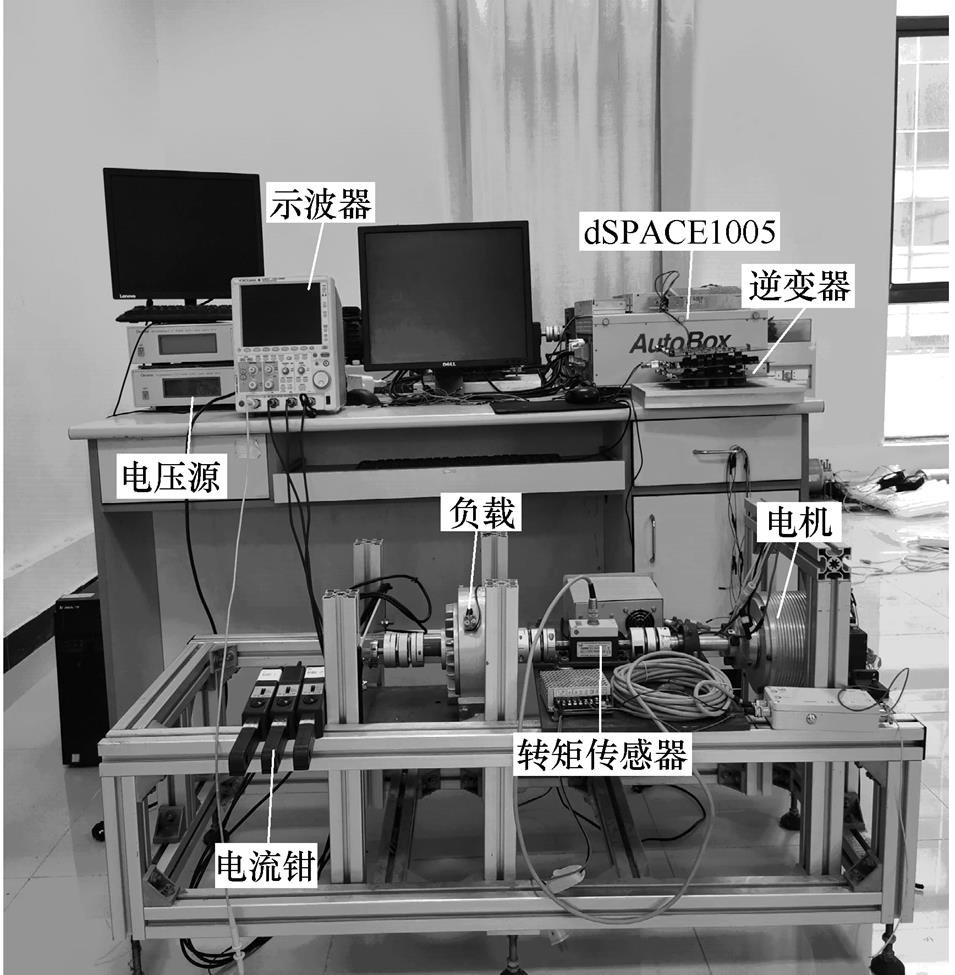
图8 五相PMSM控制系统实验平台
Fig.8 Experiment platform of control system for five phases PMSM
首先给出A相开路时电机在转速为200r/min,电磁转矩为3N·m下由正常到故障再到容错的切换运行。A相开路下正常、故障和容错切换转矩、电流波形如图9所示。可以看出,A相开路容错状态下3次谐波电流被成功注入,且容错电流与理论推导一致。电机的转矩脉动由故障情况下的36.4%降低到了容错运行下的17.3%。图10和图11分别为电机在转速200r/min,电磁转矩为1N·m时AB、AC相开路运行的情况,在短暂调节之后,容错电流波形趋于稳定,3次谐波电流成功注入,转矩脉动也明显降低。充分证明了本文所提容错算法能够使电机在几种故障状态下仍然能够平稳地输出转矩。
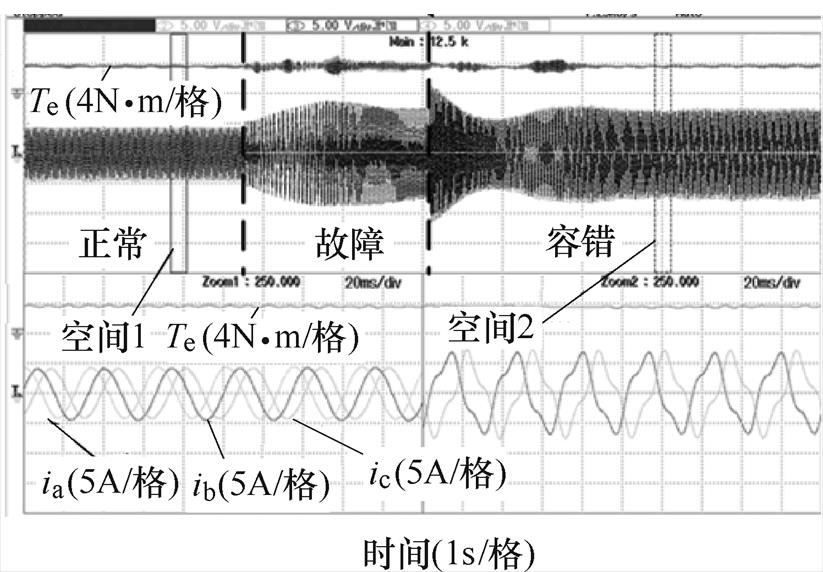
图9 A相开路下正常、故障和容错切换转矩、电流波形
Fig.9 Torque and phase currents waveforms under normal operation, fault operation and fault tolerant operation conditions under A phases open-circuit
图12~图14给出几种容错状态下静止坐标系上的参考电流以及实际电流的跟踪情况。可以看出,
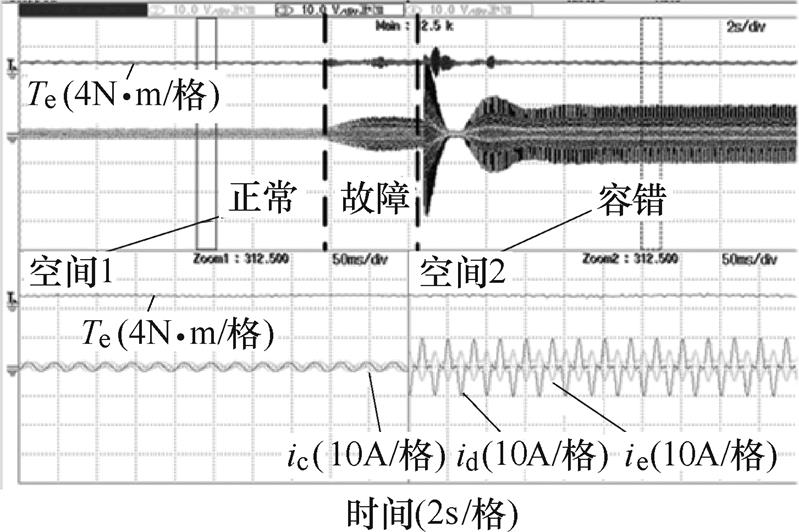
图10 AB相开路下正常、故障和容错切换转矩、电流波形
Fig.10 Torque and phase currents waveforms under normal operation, fault operation and fault tolerant operation conditions under AB phases open-circuit
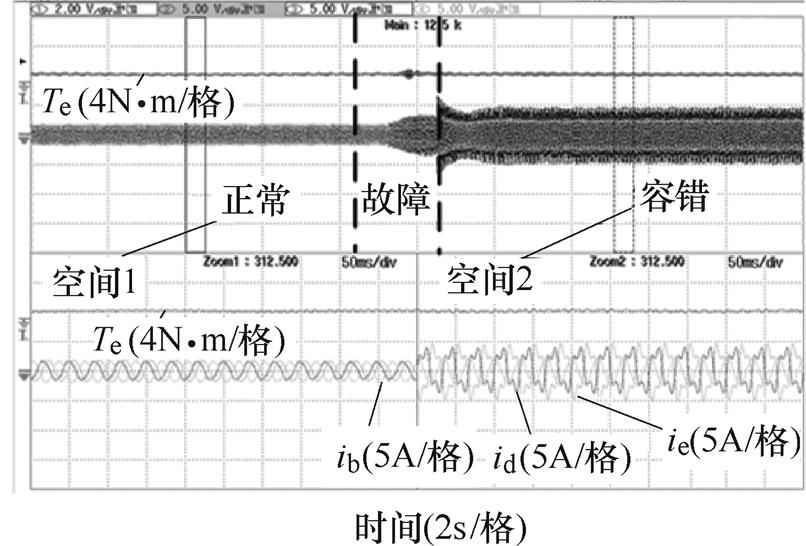
图11 AC相开路下正常、故障和容错切换转矩、电流波形
Fig.11 Torque and phase currents waveforms under normal operation, fault operation and fault tolerant operation conditions of AC phases open-circuit
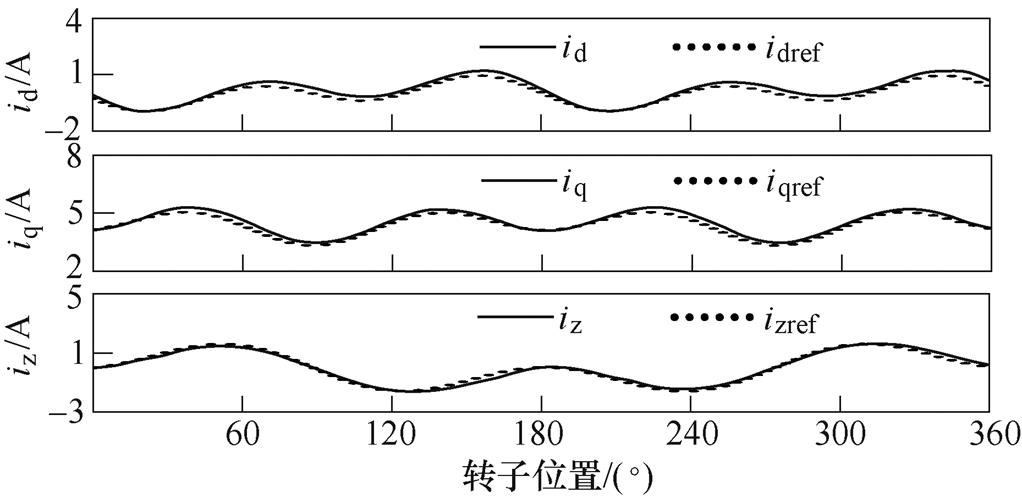
图12 A相开路情况下的d1、q1、z1轴参考电流和实际反馈电流波形
Fig.12 Waveforms of d1、q1、z1 frame reference and feedback currents under A phase open-circuit
三种故障容错状态下,q轴电流都成功跟踪上由转速闭环生成的参考电流。进一步分析可知,容错参考电流变换到静止坐标系上时,d、z轴参考电流均变成了交流信号。对于交变的d、z轴电流,通过本文所提出的无差拍电流跟踪策略后也有很好的跟踪效果,能为CPWM控制提供准确的参考电压。充分证明了本文所提的无差拍电流跟踪方法能够代替传统电流闭环中的PI控制器,且对于交变的信号也有着较好的跟踪性能。
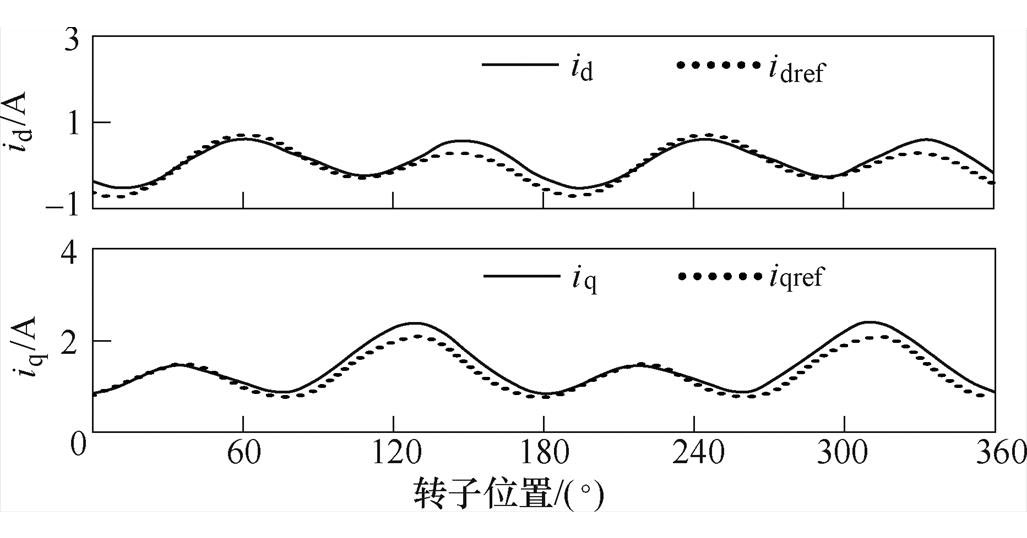
图13 AB相开路情况下的d、q轴参考电流和实际反馈电流波形
Fig.13 Waveforms of d, q frame reference and feedback currents under AB phase open-circuit
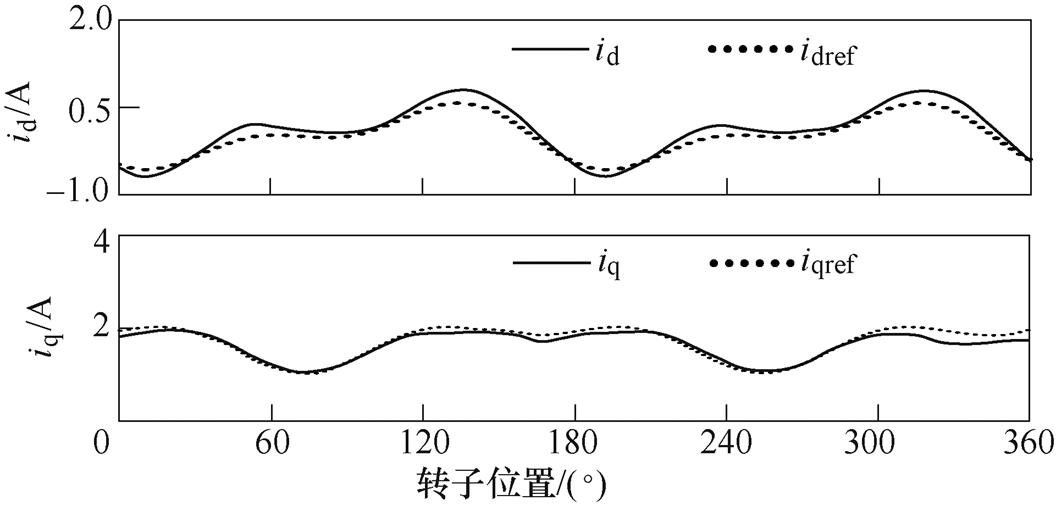
图14 AC相开路情况下的d、q轴参考电流和实际反馈电流波形
Fig.14 Waveforms of d, q frame reference and feedback currents under AC phase open-circuit
为了验证所提控制策略的动态性能,图15给出了转速突降时,几种故障容错运行下的电流跟踪情况。由图15a可知,电机给定转速在11s处发生突变,转速从原先的200r/min降到100r/min时的运行状况。
可以看到,在短暂的调节过程后,转速达到新的稳定状态。分析图15b~图15d可知,在转速突降时刻起一直到转速趋于稳定的过程中,参考电流随着转速闭环迅速调整。同时,实际电流在整个过程中都能很好地跟踪上参考电流,充分说明了所提方法的高动态性能。
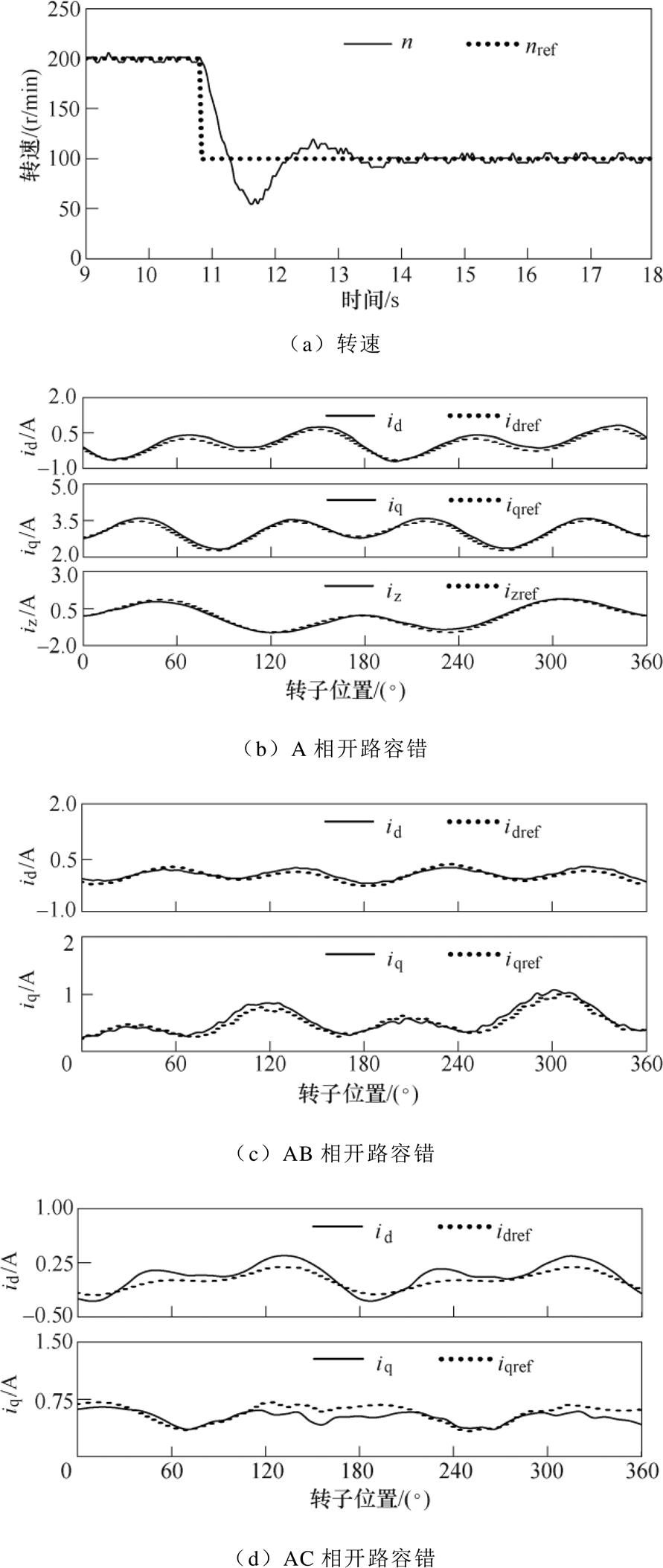
图15 突减转速的电流跟踪情况
Fig.15 Current tracking under sudden deceleration
针对FPMM的单相和两相开路故障,本文首先建立了容错状态下的转矩方程,以抑制转矩脉动为目标,计算得到3次谐波电流注入后的容错参考电流,实现了电机故障状态下的无扰动运行。其次为了跟踪静止坐标系上交变的容错参考电流,提出了无差拍电流跟踪的控制策略。该控制策略通过对电机状态方程的离散化处理,实现了对交变参考电流高精度的跟踪控制。实验结果表明,本文提出的模型离散容错控制策略能够很好地跟踪交变的参考电流。在省去电流环闭环中PI控制器的同时,也保证了电机在容错运行时对交变参考电流的跟踪性能,提高了电机容错运行的可靠性。
参考文献
[1] 刘自程, 李永东, 郑泽东. 多相电机控制驱动技术研究综述[J]. 电工技术学报, 2017, 32(24): 17-29.
Liu Zicheng, Li Yongdong, Zheng Zedong. Control and drive techniques for multiphase machines: a review[J]. Transactions of China Electrotechnical Society, 2017, 32(24): 17-29.
[2] 田代宗, 孙宇光, 王善铭, 等. 多相整流永磁同步发电机绕组内部相间短路的故障分析[J]. 电工技术学报, 2020, 35(6): 1262-1271.
Tian Daizong, Sun Yuguang, Wang Shanming, et al. Analysis of stator internal phase-to-phase short- circuit in the multiphase permanent magnet synchronous generator with rectifier load system[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1262-1271.
[3] 鲍晓华, 刘佶炜, 孙跃, 等. 低速大转矩永磁直驱电机研究综述与展望[J]. 电工技术学报, 2019, 34(6): 1148-1160.
Bao Xiaohua, Liu Jiwei, Sun Yue, et al. Review and prospect of low-speed high-torque permanent magnet machines[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1148-1160.
[4] Deng Wenzhe, Zuo Shuguang. Comparative study of sideband electromagnetic force in internal and external rotor PMSMs with SVPWM technique[J]. IEEE Transactions on Industrial Electronics, 2019, 66(2): 956-966.
[5] Wang Wei, Feng Yanan, Shi Yan, et al. Fault-tolerant control of primary permanent-magnet linear motors with single phase current sensor for subway applications[J]. IEEE Transactions on Power Elec- tronics, 2019, 34(11): 10546-10556.
[6] Zhou Xinxiu, Sun Jun, Li Haitao, et al. PMSM open-phase fault-tolerant control strategy based on four-leg inverter[J]. IEEE Transactions on Power Electronics, 2020, 35(3): 2799-2808.
[7] Zhao Yu, Li Dawei, Pei Tonghao, et al. Overview of the rectangular wire windings AC electrical mane[J]. China Electrotechnical Society Transactions on Electrical Machines and Systems, 2019, 3(2): 160- 169.
[8] Wang Kai, Gu Zhengyong, Liu Chuang, et al. Design and analysis of five phase SPM machine considering third harmonic current injection[J]. IEEE Transa- ctions on Energy Conversion, 2018, 33(3): 1108- 1117.
[9] 赵品志, 杨贵杰, 李勇. 三次谐波注入式五相永磁同步电机转矩密度优化[J]. 中国电机工程学报, 2010, 30(33): 71-77.
Zhao Pinzhi, Yang Guijie, Li Yong. Torque density optimization for five-phase PMSM with third harmonic injection[J]. Proceedings of the CSEE, 2010, 30(33): 71-77.
[10] 朱鹏, 乔鸣忠, 张晓锋, 等. 3次谐波电流注入对五相感应电机系统运行性能影响分析[J]. 电工技术学报, 2016, 31(20): 102-110.
Zhu Peng, Qiao Mingzhong, Zhang Xiaofeng, et al. The effects of third harmonic current injection on operation performance of five-phase induction motor[J]. Transactions of China Electrotechnical Society, 2016, 31(20): 102-110.
[11] 高宏伟, 杨贵杰, 刘剑. 三次谐波注入式五相永磁同步电机矢量控制策略[J]. 中国电机工程学报, 2014, 34(24): 4101-4108.
Gao Hongwei, Yang Guijie, Liu Jian. A vector control strategy for five-phase PMSM with third harmonic injection[J]. Proceedings of the CSEE, 2014, 34(24): 4101-4108.
[12] 刘国海, 宋成炎, 徐亮, 等. 基于SVPWM的五相永磁同步电机两相开路故障容错控制策略[J]. 电工技术学报, 2019, 34(1): 23-32.
Liu Guohai, Song Chengyan, Xu Liang, et al. SVPWM-based fault-tolerant control strategy under two-phase open-circuit fault of five-phase permanent- magnet motor[J]. Transactions of China Electro- technical Society, 2019, 34(1): 23-32.
[13] Liu Guohai, Song Chenyan, Chen Qian. FCS-MPC- based fault-tolerant control of five-phase IPMSM for MTPA operation[J]. IEEE Transactions on Power Electronics, 2020, 35(3): 2822-2894.
[14] 魏书荣, 吴锐, 符杨, 等. 海上双馈感应发电机定子绕组匝间短路容错技术可行性分析[J]. 电力系统自动化, 2019, 43(5): 114-124, 132.
Wei Shurong, Wu Rui, Fu Yang, et al. Feasibility analysis of fault-tolerant technology for stator winding turn-to-turn short-circuit fault of offshore doubly-fed induction generator[J]. Automation of Electric Power System, 2019, 43(5): 114-124, 132.
[15] 刘国海, 高猛虎, 周华伟, 等. 五相永磁同步电机磁链改进型容错直接转矩控制[J]. 中国电机工程学报, 2019, 39(2): 359-365, 633.
Liu Guohai, Gao Menghu, Zhou Huawei, et al. Flux-modification-based fault-tolerant DTC for five- phase PMSM[J]. Proceedings of the CSEE, 2019, 39(2): 359-365, 633.
[16] 刘胜, 郭晓杰, 张兰勇. 六相永磁同步电机鲁棒自适应反步滑模容错控制[J]. 电机与控制学报, 2020, 24(5): 68-78, 88.
Liu Sheng, Guo Xiaowei, Zhang Lanyong. Robust adaptive backstepping sliding mode control for six- phase PMSM system with open phases[J]. Electric Machines and Control, 2020, 24(5): 68-78, 88.
[17] Chen Qian, Zhao Wengxiang, Liu Guohai, et al. Extension of virtual-signal-injection-based MTPA control for five-phase IPMSM into fault-tolerant operation[J]. IEEE Transactions on Industrial Elec- tronics, 2019, 66(2): 944-955.
[18] Zhou Huaiwei, Zhao Wenxiang, Liu Guohai, et al. Remedial field-oriented control of five-phase fault- tolerant permanent-magnet motor by using reduced- order transformation matrices[J]. IEEE Transactions on Industrial Electronics, 2016, 64(1): 169-178.
[19] Ma Mingyao, Yuan Kexiang, Yang Qingqing, et al. Open-circuit fault-tolerant control strategy based on five-level power converter for SRM system[J]. China Electrotechnical Society Transactions on Electrical Machines and Systems, 2019, 3(2): 178-186.
[20] 郑萍, 唐佩伦, 隋义, 等. 电动汽车用五相永磁同步电机的容错控制策略[J]. 电机与控制学报, 2013, 17(10): 65-69, 84.
Deng Ping, Tang Peilun, Sui Yi, et al. Fault-tolerant control strategy of a five-phase permanent magnet synchronous machine used for EV[J]. Electrice Machines and Control, 2013, 17(10): 65-69, 84.
[21] 赵品志, 杨贵杰, 李勇. 五相永磁同步电动机单相开路故障的容错控制策略[J]. 中国电机工程学报, 2011, 31(24): 68-76.
Zhao Pinzhi, Yang Guijie, Li Yong. Fault-tolerant control strategy for five-phase permanent magnetic synchronous motor under single phase open-circuit fault condition[J]. Proceedings of the CSEE, 2011, 31(24): 68-76.
[22] 高宏伟, 杨贵杰. 五相永磁同步电机缺相运行的建模与控制[J]. 电工技术学报, 2016, 31(20): 93-101.
Gao Hongwei, Yang Guijie. Modeling and control of five-phase permanent magnet synchronous motor with one phase open-circuit fault[J]. Transactions of China Electrotechnical Society, 2016, 31(20): 93- 101.
[23] Tian Bing, Mirzaeva G, An Quntao, et al. Fault- tolerant control of a five-phase permanent magnet synchronous motor for industry applications[J]. IEEE Transactions on Industry Applications, 2018, 54(4): 3943-3952.
[24] Liu Guohai, Lin Zhipeng, Zhao Wengxiang, et al. Third harmonic current injection in fault-tolerant five-phase permanent-magnet motor drive[J]. IEEE Transactions on Power Electronics, 2018, 33(8): 6970-6979.
[25] 王培侠, 姜卫东, 王金平, 等. 基于电流滞环控制的无刷直流电机多状态换相转矩脉动抑制方法[J].电工技术学报, 2018, 33(22): 5261-5272.
Wang Peixia, Jiang Weidong, Wang Jinping, et al. A current hysteresis control method for brushless DC motor in multi-state with commutation torque ripple reduction[J]. Transactions of China Electrotechnical Society, 2018, 33(22): 5261-5272.
[26] 李争, 安金峰, 肖宇, 等. 基于自适应观测器的永磁同步直线电机模型预测控制系统设计[J]. 电工技术学报, 2021, 36(6): 1190-1200.
Li Zheng, An Jinfeng, Xiao Yu, et al. Design of model predictive control system for permanent magnet synchronous linear motor based on adaptive observer[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1190-1200.
[27] Yuan Xin, Zhang Chengning, Zhang Shuo. A novel deadbeat predictive current control scheme for OEW- PMSM drives[J]. IEEE Transactions on Power Electronics, 2019, 34(12): 11990-12000.
[28] Wang Jinyu, Tang Yi, Lin Pengfeng, et al. Deadbeat predictive current control for modular multilevel converters with enhanced steady-state performance and stability[J]. IEEE Transactions on Power Elec- tronics, 2020, 35(7): 6878-6894.
[29] 陈琢, 王琛琛, 成前. 基于单一矢量的两电平逆变器快速模型预测控制[J]. 电工技术学报, DOI: 10.19595/j.cnki.1000-6753.tces.L90107.
Chen Zhuo, Wang Chenchen, Cheng Qian. Fast model predictive control of two-level inverter based on single vector[J]. Transactions of China Elec- trotechnical Society, DOI: 10.19595/j.cnki.1000-6753. tces.L90107.
[30] 余晨辉, 汪凤翔, 林贵应. 基于在线扰动补偿的三电平PWM整流器级联式无差拍控制策略[J]. 电工技术学报, DOI: 10.19595/j.cnki.1000-6753.tces. 201112.
Yu Chenhui, Wang Fengxiang, Lin Guiying. Cascaded deadbeat control strategy with online disturbance compensation for three-level PWM rectifier[J]. Transactions of China Electrotechnical Society, DOI: 10.19595/j.cnki.1000-6753.tces. 201112.
[31] Dastjerdi R S, Abbasian M A, Saghafi H. Perfor- mance improvement of permanent-magnet synchronous motor using a new deadbeat-direct current con- troller[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3530-3543.
[32] 魏新迟, 许利通, 骆仁松, 等. 考虑饱和效应的无刷双馈发电机功率模型预测控制[J]. 电工技术学报, 2021, 36(17): 3721-3729.
Wei Xinchi, Xu Litong, Luo Rensong, et al. Model predictive power control of brushless doubly-fed induction generator considering saturation effect[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3721-3729.
[33] 王宏佳, 徐殿国, 杨明. 永磁同步电机改进无差拍电流预测控制[J]. 电工技术学报, 2011, 26(6): 39-45.
Wang Hongjia, Xu Dianguo, Yang Ming. Improved deadbeat predictive current control strategy of permanent magnet motor drives[J]. Transactions of China Electrotechnical Society, 2011, 26(6): 39-45.
Open-Circuit Fault-Tolerant Control for Five-Phase Permanent Magnet Motors with Trapezoidal Back-EMF by Deadbeat Current Tracking
Abstract When an open-circuit fault occurs, the third harmonic current needs to be injected to utilize the third harmonic back-EMF for the five-phase permanent magnet motor with trapezoidal back EMF. In this case, the fault-tolerant reference current in the static coordinate system is the AC quantity. Due to the bandwidth limitation, the traditional proportional-integral (PI) controller is difficult to track the AC fault-tolerant current accurately, which limits the smooth operation of the system. For this reason, this paper proposes a new fault-tolerant control strategy based on deadbeat current tracking. Firstly, to generate smooth torque under fault condition, the fault-tolerant reference current is obtained according to the principle of zero torque ripple. Secondly, by Euler’s discrete method, the discrete models of the motor under single-phase open-circuit and two-phase open-circuit faults are constructed respectively. And then, the deadbeat method is used to track the alternating fault-tolerant reference current, which provides accurate reference voltages for the carrier pulse width modulation (CPWM). Finally, an experimental platform is constructed, and the results verify the effectiveness of the proposed control strategy.
Keywords:Five-phase permanent magnet motor, trapezoidal back-EMF, open-circuit fault, alternating current, deadbeat
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.200897
国家自然科学基金(52077097, 51707083)和江苏省高校优势学科资助项目。
收稿日期 2020-07-22
改稿日期 2020-09-21
E-mail: chenqian0501@ujs.edu.cn(通信作者)
夏雨航 男,1996年生,硕士研究生,研究方向为永磁电机控制。
E-mail: 1035126613@qq.com
(编辑 崔文静)