Tab.1 Typicallarge-scale wind power off-grid accident caused by FRT failure

事故时间事故地点风机脱网台数脱网功率/ kW 2011.2.24甘肃酒泉59884.0万 2011.4.17甘肃瓜州70297.6万 2011.4.17河北张家口64485.0万 2011.4.25甘肃酒泉1278153万 2012.5.14河北沽源58473.71万 2016.9.28澳大利亚9个风电场45.6万
摘要 风机故障穿越失败导致大面积连锁脱网,严重威胁电力系统的安全稳定运行。撬棒是双馈风电机组广泛采用的故障穿越方案,但存在可控性差、转矩脉动大和吸收无功多等固有缺陷,难以适应日趋严格的电网标准。近年来,国内外学者针对无撬棒故障穿越技术开展了广泛研究,并提出了一系列控制方法,但鲜有针对该研究工作进行归纳整理和分析总结。为此,该文整理了各国电网标准中故障穿越相关的最新技术规范,梳理了双馈风电机组实现无撬棒故障穿越的技术要点,并对技术现状进行了分类与对比。最后,从新的技术规范、新的运行场景和新的控制模式等方面对未来发展方向进行讨论与展望。
关键词:双馈风电机组 无撬棒 故障穿越 电网标准
随着能源危机、环境污染和气候变化等问题的日益突出,大力发展风电已成为世界各国贯彻国家能源安全和低碳化战略的重大需求[1]。近年来,风电在全球范围内发展迅猛,据国际风能理事会(Global Wind Energy Council, GWEC)统计:截止2021年底,全球风电累计装机容量达8.37亿kW,其中,我国约3.2亿kW,占比38.2%,位居世界第一[2]。此外,四百余家风能企业联合发布的《风能北京宣言》指出,为实现“碳达峰、碳中和”目标,我国风电总装机容量到2030年至少要达到8亿kW,到2060年至少要达到30亿kW[3]。由此可见,风电正逐渐成为电力系统的重要电源。
不同于传统发电,风力发电广泛采用电力电子变换器接入电网,对电网电压波动的抗扰性差,易于故障穿越失败而发生风电大面积连锁脱网事故,严重危害电力系统的安全稳定运行[4-5]。表1列举了一些国内外典型事故案例[6-9],例如:我国甘肃酒泉“425”事故中,因天气原因诱发玉门变电所330kV母线故障失压,继而引发该地区1 278台风机连锁脱网,损失出力达153万kW,直接导致敦煌变电所330kV母线跌至247kW,西北电网频率下降到49.765Hz;南澳“9·28”事故中,因极端天气影响,三条275kV输电线路故障导致电网电压骤降,引发九个风电场连锁脱网,损失出力45.6万kW,最终导致50h后恢复供电的全南澳州大停电。因此,故障穿越已成为风电大规模开发利用亟待解决的关键问题。
表1 典型故障穿越失败导致的风电大面积脱网事故
Tab.1 Typicallarge-scale wind power off-grid accident caused by FRT failure
事故时间事故地点风机脱网台数脱网功率/ kW 2011.2.24甘肃酒泉59884.0万 2011.4.17甘肃瓜州70297.6万 2011.4.17河北张家口64485.0万 2011.4.25甘肃酒泉1278153万 2012.5.14河北沽源58473.71万 2016.9.28澳大利亚9个风电场45.6万
在诸多风电机型中,双馈风电机组因具有变速恒频运行和变流器容量小等优点,已占据国内60%以上的市场份额[10],是当前最主流的风电机型。然而,双馈风电机组的定子绕组直接并网,对电网电压波动非常敏感,实现故障穿越也最为困难,双馈风电机组的结构示意如图1所示。为此,国内外学者提出了一系列硬件保护方案,例如:在转子侧接入撬棒(Crowbar)[11]、直流斩波器(DC-Chopper)[12]、储能装置[13]等,在定子侧接入动态电压恢复器(Dynamic Voltage Regulator, DVR)[14]、额外并网变换器[15]、故障限流器(Superconducting Fault Current Limiter, SFCL)[16]和统一电能质量调节器(Unified Power Quality Conditioner, UPQC)[17]等。其中,撬棒装置因成本低且控制简单而备受青睐,是当前应用最为广泛的故障穿越方案。但是该方案存在一些固有缺陷,一方面会产生极大的电磁转矩脉动,危害风机轴系健康;另一方面风机会失去可控性,并从电网中吸收大量无功,加剧恶化电网电压,撬棒投入时转矩和无功的实验波形如图2所示。随着各国电网对风电主动参与系统调节需求的日益迫切,传统的撬棒保护方案将难以适应日益严苛的风电并网标准和新型电力系统的建设需要,发展无撬棒故障穿越技术具有重要的理论意义与应用价值。
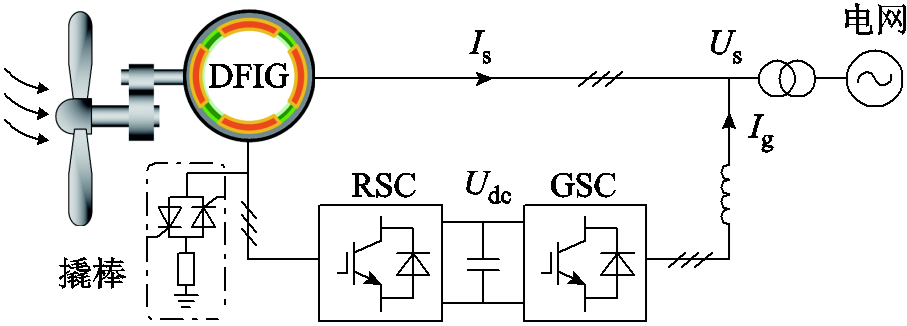
图1 双馈风电机组的结构示意图
Fig.1 Schematic diagram of DFIG-based wind turbine
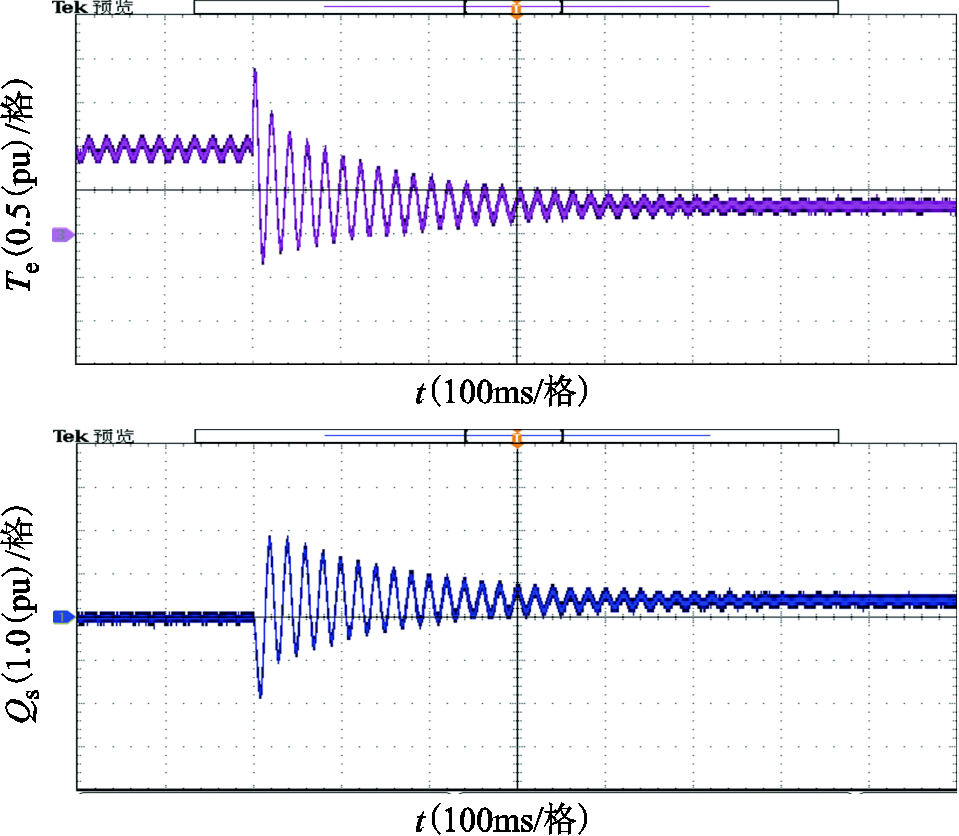
图2 撬棒投入时转矩和无功的实验波形
Fig.2 Experimentalwaveforms when crowbar is activated
近年来,无撬棒故障穿越技术蓬勃发展,受到国内外学者的广泛关注。文献[18]分析了双馈风电机组实现无撬棒故障穿越的物理机理,并给出控制设计的一般化指导建议。文献[19-20]计及转子侧电流控制的影响,分析了电网故障下双馈风电机组的动态行为。文献[21]量化分析了有/无撬棒控制下双馈风电机组定子磁链的衰减时间尺度。文献[22]分析了无撬棒控制下双馈风电机组的故障电流特性。文献[23]分析了双馈风电机组无撬棒故障穿越的运行极限及其影响因素。除上述理论分析外,国内外学者还提出了一系列无撬棒故障穿越控制方法,如优化控制指令的电感模拟控制[24]、优化控制器的H∞控制[25]、优化前馈项的暂态电流前馈控制[26]、优化被控对象的虚拟电感[27]、优化控制结构的磁链跟踪控制[28]等。这些方法均可实现无撬棒故障穿越,但是其解决思路和手段各不相同,有必要对现有技术方案进行归纳整理和分析总结,以便相关研究学者快速了解该技术领域的研究背景、技术现状与最新动态。虽然已有文献对电网故障下风力发电的电网标准[29]、热点问题[30]、运行控制[31]、穿越技术[32]、电流控制[33]进行了综述,但上述文献并非专门针对无撬棒故障穿越技术这一主题。
为此,本文针对双馈风电机组无撬棒故障穿越技术进行了综合性回顾、总结与展望。首先梳理了世界各国电网标准中故障穿越相关的最新技术规范,接着分析了暂态过电流的产生机理和无撬棒故障穿越的技术要点。然后,从电流控制环的优化环节入手,将现有穿越控制方法分为修改控制器、优化被控对象、优化前馈项和优化电流指令四类,并进行了对比分析与总结。最后,从新的技术规范、新的运行场景和新的控制模式等方面,对无撬棒故障穿越技术的发展方向进行了讨论与展望。
目前,世界主要国家的风电并网标准均提出了故障穿越技术要求,其核心指标主要包括不脱网运行与无功支撑两个方面。为此,本节将对国际上最新电网标准中故障穿越要求进行概述,见表2。
表2 世界主要国家和组织的电网标准
Tab.2 Grid codes of major countries and organizations

国家/组织标准来源更新时间网址 中国[34]国标委2021年8月std.samr.gov.cn 丹麦[35]Energinet2016年7月en.energinet.dk 英国[36]National Grid2021年11月www.nationalgrideso.com
(续)

国家/组织标准来源更新时间网址 德国[37]TenneT2012年12月www.tennet.eu 美国[38]NERC2021年10月www.nerc.com 爱尔兰[39]EirGrid2021年12月www.eirgridgroup.com 加拿大[40]Hydro-Québec2019年1月www.hydroquebec.com 澳大利亚[41]AEMC2022年3月www.aemc.gov.au IEEE[42]IEEE2022年4月standards.ieee.org
从穿越的故障类型上看,主要包括低电压穿越(Low Voltage Ride Through, LVRT)、高电压穿越(High Voltage Ride Through, HVRT)和连续故障穿越三种。其中LVRT是最基本要求,各国电网标准均提出了严苛的技术规范,如我国要求风电机组在并网点电压跌落至标称电压20%时,至少保持不脱网连续运行625ms,即风电机组需要在规定的LVRT运行曲线上方保持不脱网运行,电网标准中故障穿越运行曲线如图3所示。其他国家对于LVRT的要求与我国基本类似,其差异主要体现在电压跌落深度和不脱网运行时间要求。其中,IEEE、澳大利亚、德国、加拿大和美国还要求风电机组在并网点电压跌落至零时,仍保持不脱网连续运行100ms以上,即具备零电压穿越(Zero Voltage Ride Through, ZVRT)能力。
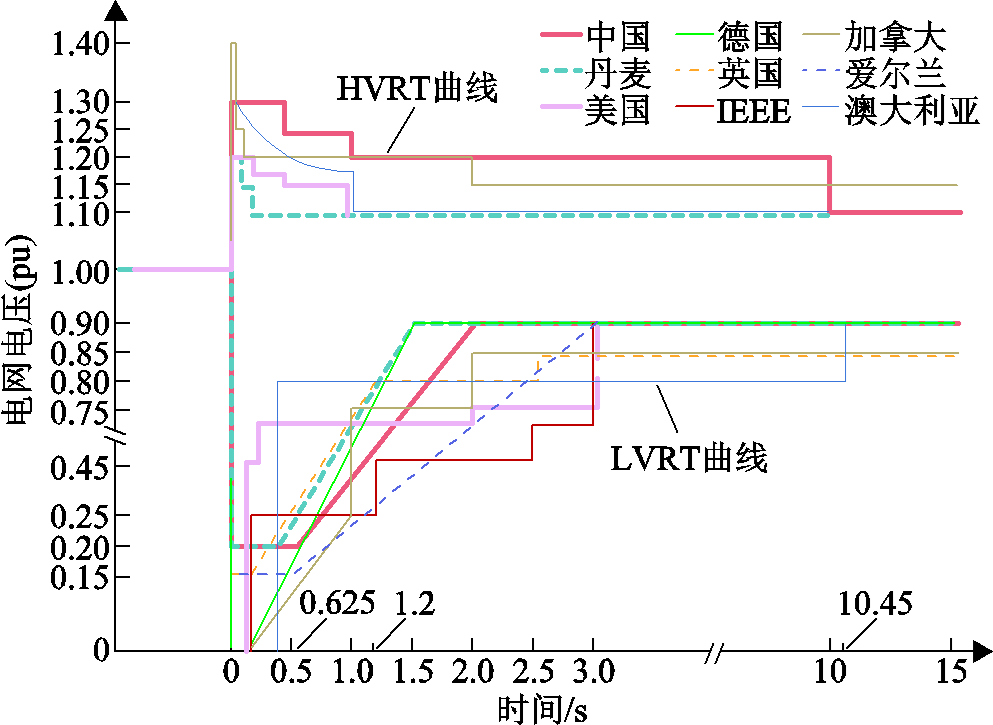
图3 电网标准中故障穿越运行曲线
Fig.3 The FRT operation curves in grid codes
在高电压穿越方面,中国、美国、IEEE、丹麦、澳大利亚、德国和加拿大均提出相关的技术规范,要求风电机组在规定HVRT曲线下方保持不脱网连续运行,如我国要求风电机组在并网点电压升高至标称电压的125%~130%之间时,应保持不脱网连续运行500ms;在120%~125%之间时,应保持不脱网连续运行1s;在110%~120%之间时,应保持不脱网连续运行10s,如图3所示。表3总结了各国电网标准中不脱网运行的主要技术指标。
表3 不脱网运行的具体指标要求
Tab.3 Specific requirements for non-off-grid operation
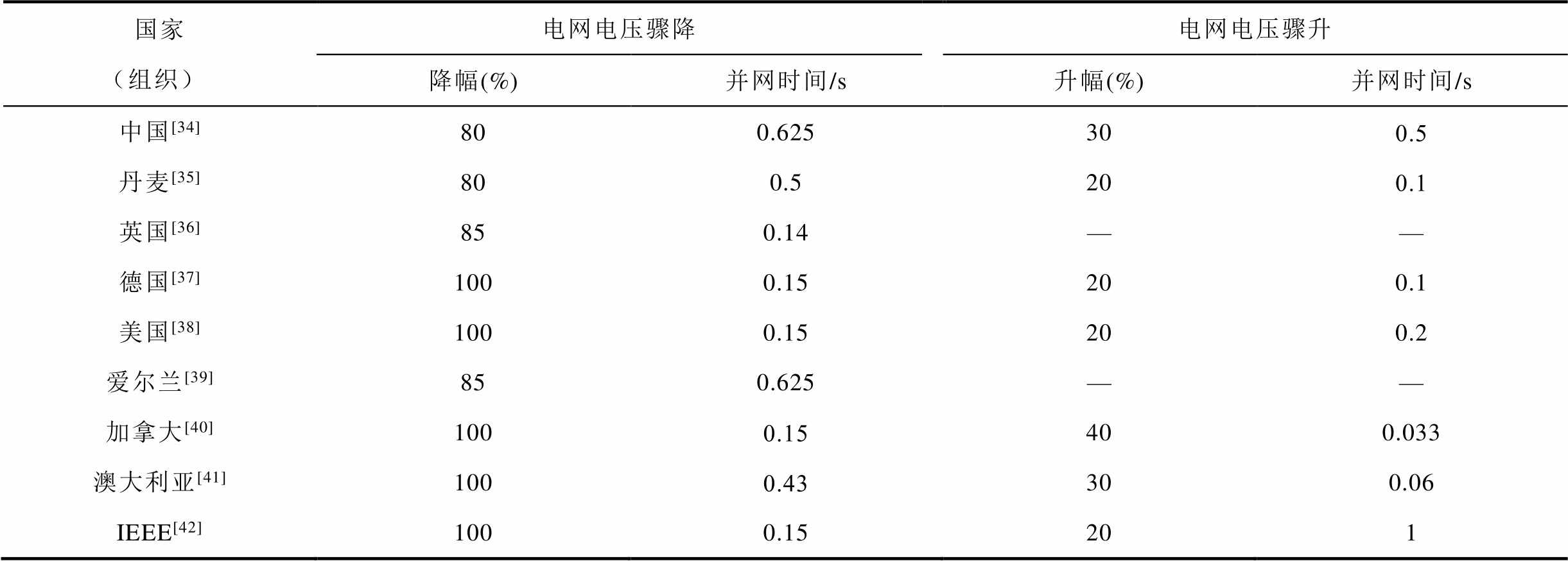
国家(组织)电网电压骤降电网电压骤升 降幅(%)并网时间/s升幅(%)并网时间/s 中国[34]800.625300.5 丹麦[35]800.5200.1 英国[36]850.14—— 德国[37]1000.15200.1 美国[38]1000.15200.2 爱尔兰[39]850.625—— 加拿大[40]1000.15400.033 澳大利亚[41]1000.43300.06 IEEE[42]1000.15201
在连续故障穿越方面,我国和丹麦提出了相关的技术要求,但具体指标尚无统一标准。我国规定连续低-高穿越的次数至少为两次,并限制了低电压阶段过渡至高电压阶段的不脱网连续运行区域,但未对低、高压阶段时间及过渡阶段时间等具体指标作明确规定。而丹麦则规定了不同故障类型下所需要承受重复故障的时间,例如,在相间短路的工况下,风机需要承受故障150ms,然后0.5~3s后再次承受150ms的故障。
除前述不脱网运行要求外,部分国家和组织(中国、德国、丹麦、西班牙、爱尔兰、IEEE等)还要求风电机组在故障穿越期间提供适当的无功电流,以支撑电网电压的恢复,即具备动态无功支撑能力。该技术要求主要包括无功电流幅值和响应时间两个方面,下文将具体介绍。
在无功电流的幅值要求方面,我国要求风电场在对称故障穿越期间向电网注入的无功电流增量应响应并网点电压变化,即满足
 (1)
(1)
式中,Ug为并网点电压标幺值;IN为额定电流;K1为动态无功电流比例系数,且K1Î[1.5, 3]。
其他国家针对无功电流的幅值要求与我国类似,图4给出了各国电网标准中无功电流的最小幅值曲线。值得说明的是,上述要求针对的是对称电网故障,而仅有极少数国家提出了不对称故障期间动态无功支撑的相关要求,故在此不再赘述。
在无功电流的响应时间方面,我国规定低电压穿越期间的无功支撑响应时间为60ms,在高电压穿越期间的无功支撑响应时间为40ms,但大多数国家并未区分高、低电压穿越期间的无功支撑响应时间。因此,本节将以低电压穿越期间的无功响应时间技术指标进行总结,见表4。可以看出,德国和西班牙的风电并网标准最为苛刻,要求无功支撑的响应时间在20ms以内。
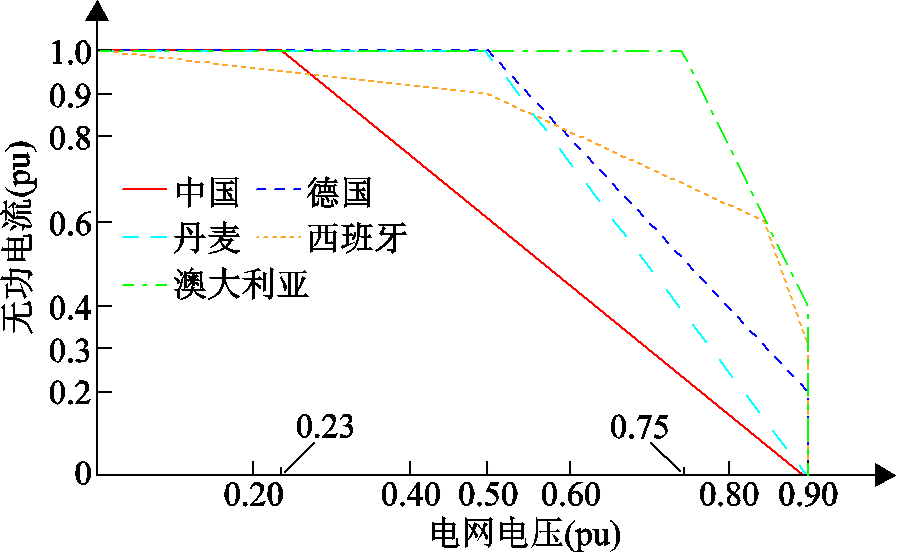
图4 电网标准中无功电流的最小幅值曲线
Fig.4 Minimum reactive current curve in grid codes
表4 世界各国标准规定的无功响应时间
Tab.4 Specific requirements for reactive power repsonse

国家(组织)响应时间/ms 德国/西班牙20 中国60 丹麦100 爱尔兰100 IEEE约120
不脱网运行是实现故障穿越的首要前提,也是双馈风电机组面临的最严峻挑战,并且由于变换器容量约束,通常需要采用无功补偿装置来实现快速无功支撑[21]。因此,下文将主要关注不脱网运行相关的技术现状。此外,转子电流应力超标是双馈风电机组穿越失败而脱网的魁首[43],抑制过电流是实现无撬棒故障穿越的关键举措。为此,本节将重点分析暂态过电流的形成机理,并剖析穿越控制的技术要点。
图5给出了双馈风电机组的转子侧等效电路[18]。图中,ur和ir为转子电压和电流;sLr和Rr为转子暂态电感和转子电阻;er为感应电动势(Electromotive Force, EMF),其在电网对称故障下的表达式为
 (2)
(2)
式中,前者为正序分量,后者为自由分量;l为转差率,lÎ[−0.3, 0.3];Ls和Lm分别为定子电感和励磁电感;Vs和ws分别为定子电压的幅值和角频率;wr为转子电气角速度;h为电网电压跌落深度;ts为定子磁链的衰减时间常数。
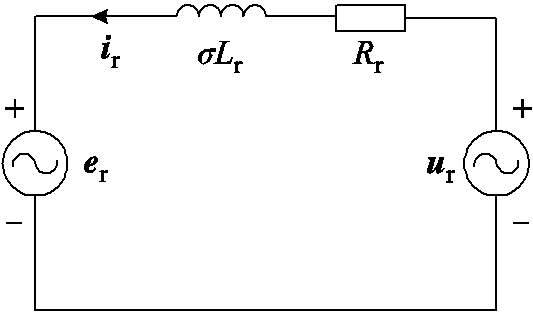
图5 双馈风电机组的转子侧等效电路
Fig.5 Rotor-side equivalent circuit of DFIG
由式(2)可以看出,EMF的自由分量正比于1−l,因此电网故障后EMF幅值非常高。以零电压故障和转差率l=−0.3为例,EMF初始幅值约为1.3Vs,远超直流母线电压(约为0.4Vs)。
图6给出了高EMF工况下a相转子电流动态行为的示意图[18]。其中,Umax为转子侧变换器的最大输出a相电压值;当−Umax<era<Umax时,可通过调控转子电压来自由控制电流上升或下降,故该区域被称为电流自由可控区(Current Free Control Area, CFCA);而当era>Umax或era<−Umax时,转子电流的幅值必然增大,故被称为电流必然上升区(Current-Inevitable-Rising-Area, CIRA)。可以看出,CIRA阶段结束时转子电流ir2为暂态电流最大值,即
 (3)
(3)
式中,ir1为CIRA的初值;Δi为电流增量,与电流的上升率与持续时间密切相关。其中,持续时间取决于EMF幅值和直流母线电压值,而上升率取决于EMF、转子电压ur及暂态电感sLr。
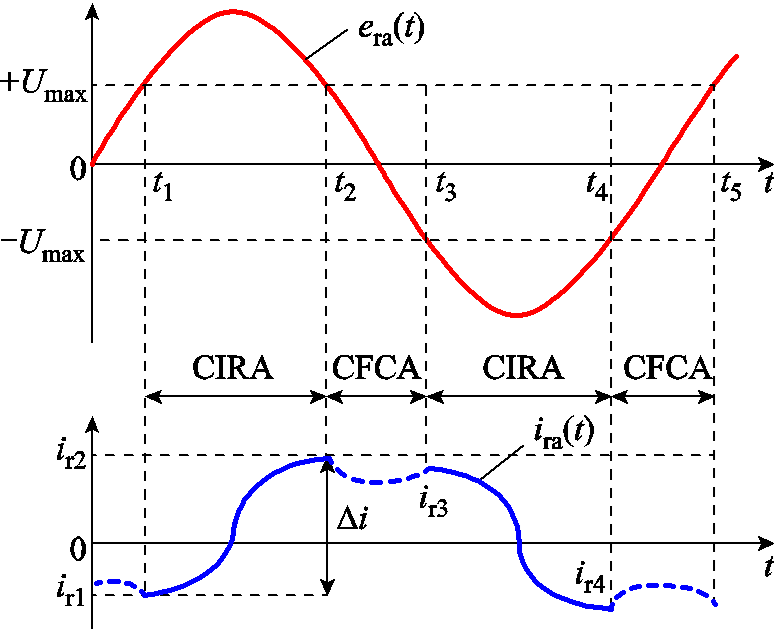
图6 高EMF工况下转子电流动态行为示意图
Fig.6 Rotor current behavior under high EMF
因此,无论采取何种措施,只要电网故障后EMF幅值高于直流母线电压,转子电流都将必然增大。此外,如果电网故障越严重(即EMF越大),变换器输出的转子电压越小(如不合理的控制),越易于引发转子暂态过电流现象,触发过电流保护而造成风电机组脱网。
对于风机控制系统而言,控制指令的准确设计和精确跟踪是实现无撬棒故障穿越的核心,下面将从这两个方面详细阐释具体的技术要点。
1)有限变换器容量约束下暂态控制指令的准确设计
由上述分析可知,抑制暂态过电流主要可以从两方面入手,即缩短CIRA持续时间和降低上升率。针对前者,只能通过降低故障后EMF幅值和提高直流母线电压值来实现,但都需要改变双馈风电机组原有的硬件结构或参数,如增设DVR[14]或SFCL[16]来降低故障后EMF幅值。值得补充说明的是,定子侧硬件保护方案大多基于该工作原理。针对后者,在不改变机组硬件结构和参数的条件下,即EMF和暂态电感sLr均维持不变,那么只能优化转子侧变换器的输出电压ur。然而,由于变换器容量通常仅为双馈风电机组额定容量的30%,即转子电流ir和转子电压ur同时受限。因此,如何在有限变换器容量约束下准确地设计暂态电流指令,以实现转子电压-电流裕度的协调利用是实现无撬棒故障控制的核心技术要点之一。
2)多重频率共存和高EMF工况下暂态控制指令的精确实施
由式(2)和图6可知,电网故障后EMF和转子电流中都存在多种频率分量,即正序分量、自由分量和负序分量(不对称故障引入),在dq旋转坐标系下分别表现为0Hz、50Hz和100Hz。而对于双馈风电机组的控制系统而言,EMF是扰动量,转子电流是控制量。因此,如何实现对多重频率共存工况下高EMF的有效抑制和转子电流的有效控制,以保障暂态控制指令的精确实施,将是破解无撬棒故障穿越难题的另一个核心技术要点。
根据电网故障后是否修改控制指令,现有穿越控制方法主要可以被分为两种类型,即维持指令型和优化指令型,双馈风电机组故障穿越控制方法的分类如图7所示。
图8给出了转子电流环的控制框图[44],其中 i* r(s)为电流指令;uf(s)为前馈项;er(s)为扰动项,即EMF。可以看出,若维持故障前的电流指令i* r(s)不变,那么电流控制主要受EMF扰动影响。由2.2节分析可知:电网故障后的EMF迥异于正常运行工况,其幅值较大且包含多个频率分量。若电流环无法有效抑制故障后EMF扰动,就会导致转子电流在EMF扰动激励下产生过电流问题。为此,一些学者从修改控制器、优化被控对象和优化前馈项等视角,通过增强电流环对EMF扰动的抑制能力,提出了一系列故障穿越控制方法。
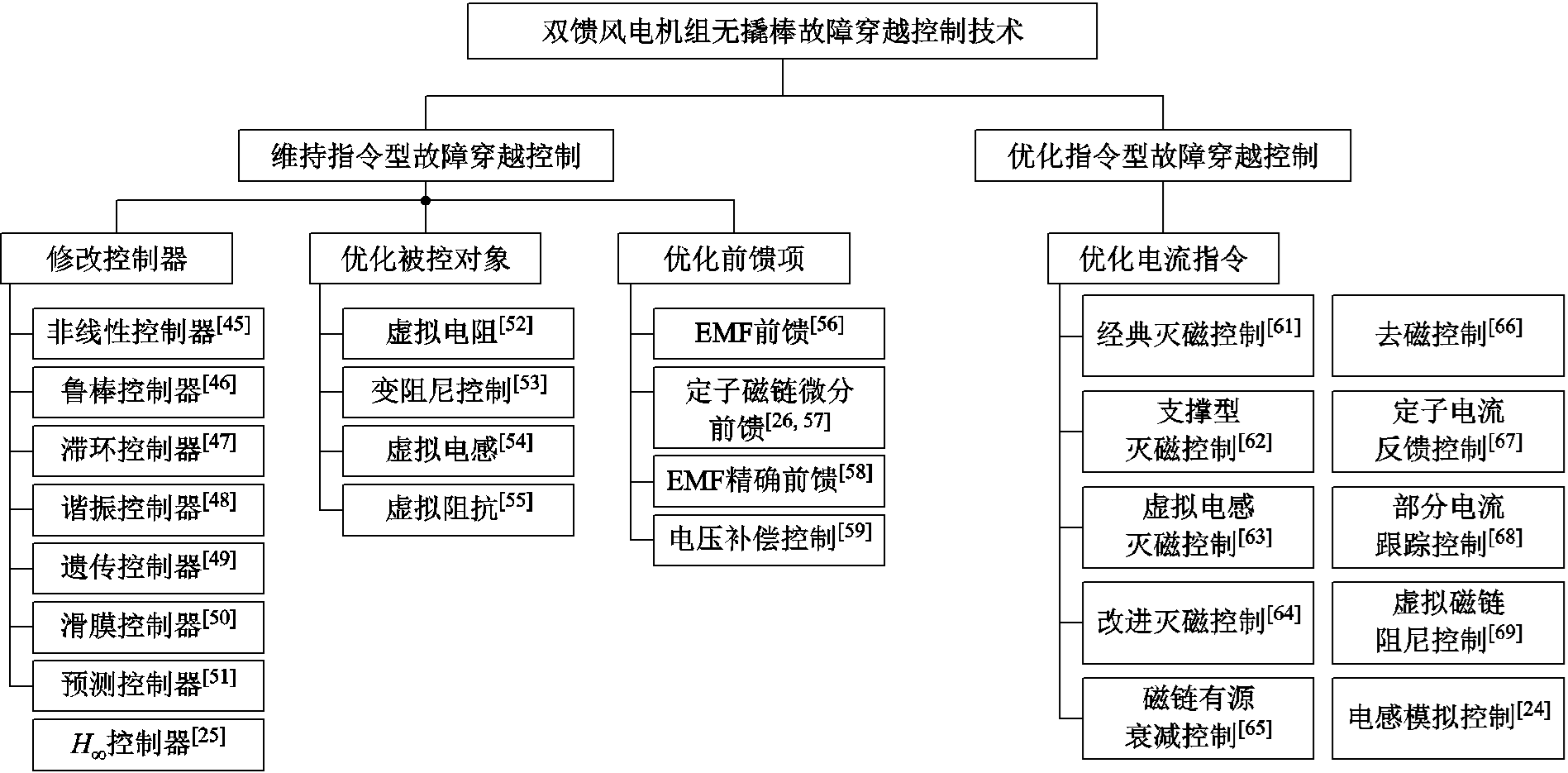
图7 双馈风电机组故障穿越控制方法的分类
Fig.7 Classification of state-of the-art FRT controltechniques of DFIG-based wind turbines
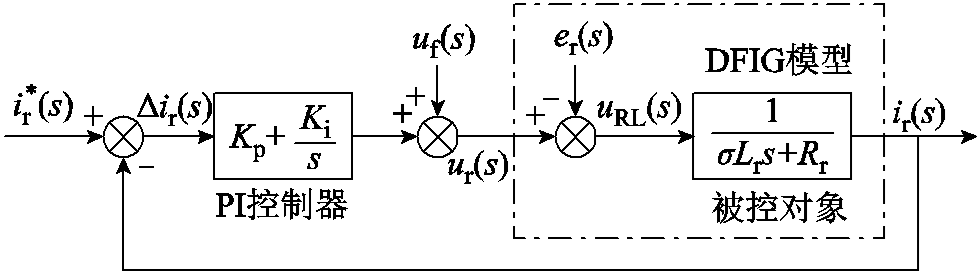
图8 转子电流环的控制框图
Fig.8 Control bolck of rotor current loop
3.1.1 修改控制器
对于MW级风电机组而言,为降低功率器件的开关损耗,其开关频率通常比较低,因此电流环的控制带宽十分有限(约100~200Hz),导致其对故障后EMF扰动的抑制能力不足[44]。为此,一些学者通过采用动态响应更快、抗扰性能更强的新型控制器来代替传统PI控制器,以增强电流环对故障后EMF的抗扰动能力,例如:非线性控制器[45]、鲁棒控制器[46]、滞环控制器[47]、谐振控制器[48]、遗传算法控制器[49]、滑模控制器[50]、预测控制器[51]、H∞控制器[25]等。这些新型控制器可以有效抑制EMF扰动,并避免转子过电流问题,但是这类方法在设计和控制上通常都比较复杂,在一定程度上限制了其大规模应用。
3.1.2 优化被控对象
文献[52]分析指出电流环对EMF抑制能力不足的原因在于其弱阻尼特性,为此通过引入虚拟电阻来优化被控对象的等效阻抗,提升了电流环对EMF扰动的阻尼效应,进而增强了双馈风电机组的故障穿越能力。文献[53]提出了变阻尼控制方法,通过改变虚拟电阻值进一步提高了电流环的阻尼特性。针对虚拟电阻仅能改善低频段阻尼特性的缺陷,文献[54]提出了虚拟电感控制方法,提升了对EMF扰动的高频段阻尼特性。文献[55]综合了虚拟电阻和电感的优缺点,提出了虚拟阻抗控制方法,实现了对低频和高频段阻尼特性的协同优化,有力提升了双馈风电机组的故障穿越控制性能,虚拟阻抗控制方法如图9所示。该类控制方法具有设计简单、物理意义清晰等优点,但是无法快速衰减定子磁链自由分量,导致暂态过渡时间较长。
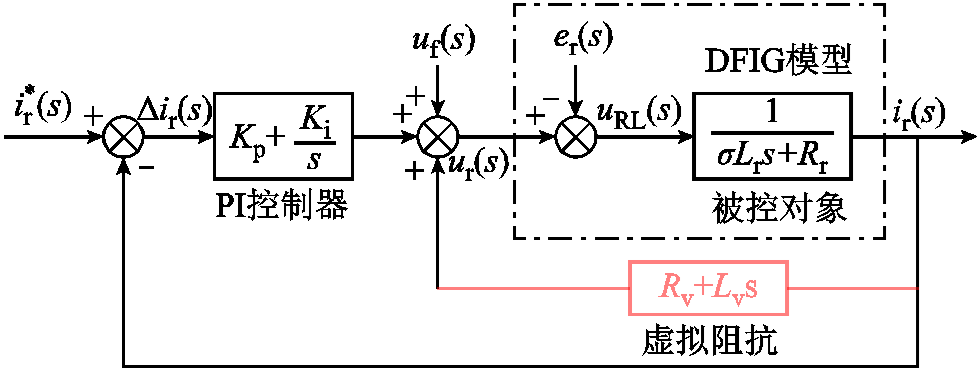
图9 虚拟阻抗控制方法
Fig.9 Virtual impedance control method
3.1.3 优化前馈项
一些学者还提出了基于优化前馈项uf(s)的故障穿越控制方法。文献[56]推导了电网故障下EMF的精确表达式,并将其作为前馈项引入电流环中,有效消除了EMF扰动对电流控制的不利影响,在电网对称和不对称故障工况均表现出较好的穿越性能,如图10所示。类似地,文献[26, 57]将通常被忽略的定子磁链微分项前馈到电流环,该微分项实际上就是故障后EMF的自由分量,从而实现了对故障后EMF扰动的有效抑制。进一步地,文献[58]考虑了控制延时的影响,设计了更为精确的EMF前馈补偿控制。此外,文献[59]在电流环中引入与EMF自由分量成正比的前馈项,以进一步提升双馈风电机组的故障穿越能力。这类方法通过将前馈项优化为与故障后EMF密切相关的分量,可以有效抵消EMF扰动,进而实现转子过电流的抑制。
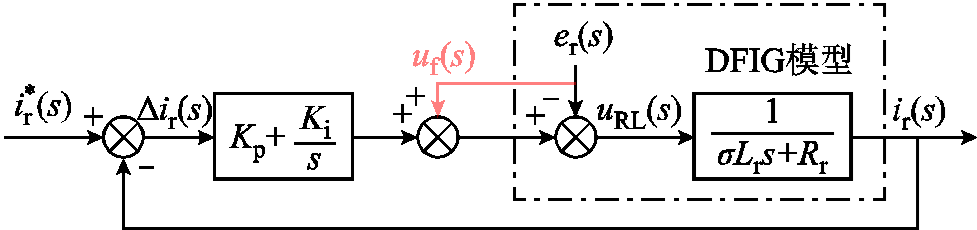
图10 EMF全前馈控制方法
Fig.10 EMF full feedforward control method
前述控制方法通过修改控制器、优化被控对象和前馈项提升了双馈风电机组的故障穿越能力,其本质在于提高了变换器对转子电流的控制能力,使转子电流可以快速准确地跟踪传统矢量控制下的正序电流指令,进而实现过电流的有效抑制。但是,这类方法存在两点不足:①由于转子电流中只包含正序分量,导致定子磁链暂态分量的衰减速率十分缓慢,类似于转子开路工况,因此将存在非常漫长的暂态过渡过程,并难以实现快速无功支撑;②由于转子电流中只包含正序分量,导致这类方法无论如何提高转子电流控制能力,都必然要求转子侧变换器的输出电压(即转子电压ur)能够充分抵消故障后EMF。然而,电网严重故障下EMF幅值将远超变换器的最大输出电压,这将导致电流环饱和并失去可控性,进一步造成故障穿越失败,因此该类方法主要适用于电网轻度故障。
显然,上述两点不足均与维持故障前正序电流指令有关,因此一些学者提出了通过优化电流指令的故障穿越控制方法,以弥补上述缺陷。这些方法通过在转子电流中注入一定的自由或负序分量,在加快定子磁链衰减的同时,利用暂态电感sLr上产生的较大压降来降低变换器的输出电压需求,进而拓展了双馈风电机组的故障穿越运行区域[60]。下面将从控制指令的优化设计和优化后指令的精确跟踪两个方面来综述该类方法的研究现状。
3.2.1 控制指令的优化设计
文献[61]提出了一种经典的灭磁控制方法,其将定子磁链的自由分量 和负序分量
和负序分量 注入电流指令中,并通过计算得到可充分抵消EMF的转子电流指令,如图11a所示。该方法不但大幅降低了转子电压需求,而且加快了定子磁链的衰减速度,有效提升了故障穿越性能。但是,该方法仅考虑如何最快灭磁,一方面忽视了变换器电流裕度对于电流指令设计的限制,导致其灭磁电流很大,在严重故障下易于过电流;另一方面,未涉及无功电流和电磁转矩的控制,存在无功支撑弱和电磁转矩脉动大等缺陷。为此,文献[62]在灭磁电流指令上叠加无功控制指令,可同时实现快速灭磁和无功支撑,但是该方法对转子侧变换器电流容量的要求更高。针对灭磁电流过大的问题,文献[63]提出了结合虚拟电感的新型灭磁控制方法,以满足转子侧变换器的电流容量约束。文献[64]分析了灭磁电流对变换器热应力的影响机理,并据此优化了灭磁控制系数。基于灭磁控制的工作原理,文献[65]提出了磁链有源衰减控制方法,通过在电流指令中仅保留灭磁电流的自由分量,不但实现了定子磁链的快速衰减,而且降低了灭磁电流需求,如图11b所示。然而,上述方法均需要定子磁链观测和相序分离环节,实施较为复杂。为此,文献[66]提出了一种在转子电流指令中注入定子电流自由分量ist的去磁控制方法,如图11c所示。该方法避免了定子磁链观测,但是仍需要进行定子电流的相序分离,并且也存在较大的电磁转矩脉动。进一步地,文献[67]提出了定子电流反馈控制方法,其直接将定子电流作为转子电流指令,如图11d所示。该方法避免了磁链观测和相序分离,实施简单,但所需的变换器输出电压较高,控制系统极易因饱和而失效。针对该问题,文献[68]提出了一种部分电流跟踪控制方法,其将定子电流乘以一个反向跟踪系数后再作为转子电流指令,有效降低转子电压需求,拓展了故障穿越运行区域,如图11e所示。此外,文献[69]提出了虚拟磁链阻尼控制方法,其工作原理与文献[68]类似。针对前述方法均未协同考虑转子电压和电流约束的问题,文献[24]揭示了当转子侧端口阻抗表现为电感特性时,控制系统可最优协调电压和电流裕度,据此提出了一种电感模拟控制方法,实现了电网严重故障下的无撬棒故障穿越,并同时抑制了电磁转矩脉动。
注入电流指令中,并通过计算得到可充分抵消EMF的转子电流指令,如图11a所示。该方法不但大幅降低了转子电压需求,而且加快了定子磁链的衰减速度,有效提升了故障穿越性能。但是,该方法仅考虑如何最快灭磁,一方面忽视了变换器电流裕度对于电流指令设计的限制,导致其灭磁电流很大,在严重故障下易于过电流;另一方面,未涉及无功电流和电磁转矩的控制,存在无功支撑弱和电磁转矩脉动大等缺陷。为此,文献[62]在灭磁电流指令上叠加无功控制指令,可同时实现快速灭磁和无功支撑,但是该方法对转子侧变换器电流容量的要求更高。针对灭磁电流过大的问题,文献[63]提出了结合虚拟电感的新型灭磁控制方法,以满足转子侧变换器的电流容量约束。文献[64]分析了灭磁电流对变换器热应力的影响机理,并据此优化了灭磁控制系数。基于灭磁控制的工作原理,文献[65]提出了磁链有源衰减控制方法,通过在电流指令中仅保留灭磁电流的自由分量,不但实现了定子磁链的快速衰减,而且降低了灭磁电流需求,如图11b所示。然而,上述方法均需要定子磁链观测和相序分离环节,实施较为复杂。为此,文献[66]提出了一种在转子电流指令中注入定子电流自由分量ist的去磁控制方法,如图11c所示。该方法避免了定子磁链观测,但是仍需要进行定子电流的相序分离,并且也存在较大的电磁转矩脉动。进一步地,文献[67]提出了定子电流反馈控制方法,其直接将定子电流作为转子电流指令,如图11d所示。该方法避免了磁链观测和相序分离,实施简单,但所需的变换器输出电压较高,控制系统极易因饱和而失效。针对该问题,文献[68]提出了一种部分电流跟踪控制方法,其将定子电流乘以一个反向跟踪系数后再作为转子电流指令,有效降低转子电压需求,拓展了故障穿越运行区域,如图11e所示。此外,文献[69]提出了虚拟磁链阻尼控制方法,其工作原理与文献[68]类似。针对前述方法均未协同考虑转子电压和电流约束的问题,文献[24]揭示了当转子侧端口阻抗表现为电感特性时,控制系统可最优协调电压和电流裕度,据此提出了一种电感模拟控制方法,实现了电网严重故障下的无撬棒故障穿越,并同时抑制了电磁转矩脉动。

图11 典型优化指令型故障穿越控制方法
Fig.11 Typical FRT control methods by optimizing the current reference
为了更清晰地展示不同暂态指令的效果差异,图12中给出了电网三相对称跌落80%故障下,典型优化指令型穿越控制方法的实验波形。可以看出,经典灭磁控制方法显著降低了转子电压需求,大大加快了定子磁链的衰减速度,但灭磁电流却超过了转子电流限制值,且电磁转矩脉动较大;图12b表明定子电流反馈控制方法可以降低转子电流,但对转子电压需求过高,导致控制系统饱和而失控,定子磁链几乎不衰减;图12c表明部分电流跟踪控制方法在有效抑制转子电流的同时也降低了转子电压需求,且有效抑制了电磁转矩脉动,综合提升了双馈风电机组的故障穿越性能。

图12 典型优化指令型故障穿越控制方法的实验波形
Fig. 12 Experimental waveforms of typical FRT control methods by optimizing current reference
3.2.2 控制指令的精确跟踪
控制指令的精确跟踪是实现故障穿越控制的前提。由第3.2.1小节可知,优化指令型穿越控制方法的典型特征在于电流指令中包含正序、自由和负序分量,即电流指令呈现出多频(0 Hz、50 Hz、100Hz)特性。然而,经典的PI控制器仅能精准跟踪正序电流(dq坐标系下为直流分量),无法保证暂态控制指令的精准实施,将导致故障穿越性能大打折扣。
针对上述问题,国内外学者提出了一些多频电流指令跟踪控制方法。文献[70-71]提出了多坐标系PI控制方法,通过正序、自由和负序等三个旋转坐标系下PI控制器来分别跟踪各相序电流指令。然而,该方法需要建立多个旋转坐标系下的PI控制系统,不但控制复杂度高、技术实施困难,而且相序分离环节还会引入控制误差和相位延迟,进而恶化系统的动态响应和稳定性[72]。为此,文献[72-73]提出了比例-积分-谐振(PI-Resonance, PI-R)控制方法,通过谐振控制器来实现对交流电流指令的精确跟踪,如图13所示。图13中,Kr和wc分别为谐振控制器的增益系数和带宽,w0为谐振角频率。该方法控制精度高,但是谐振控制器对电网频率非常敏感,控制鲁棒性不佳,并且需要两个谐振控制器,其参数设计过程也比较复杂。为此,文献[74]从电路等价性视角阐明了电流指令无静差跟踪的物理本质,并提出了一种指令前馈控制方法,如图14所示。该方法可以实现对多频控制指令的“稳、准、快”统一控制,具有鲁棒性强、控制简单等优点。表5对比了上述多频电流跟踪方法的控制性能。
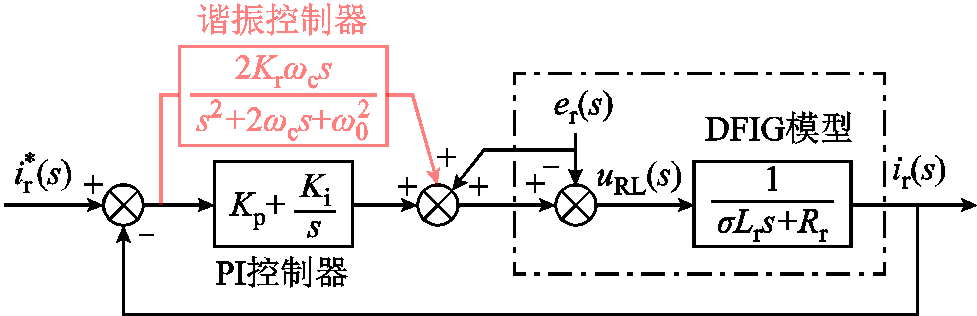
图13 PI-R控制方法
Fig.13 PI-R control method
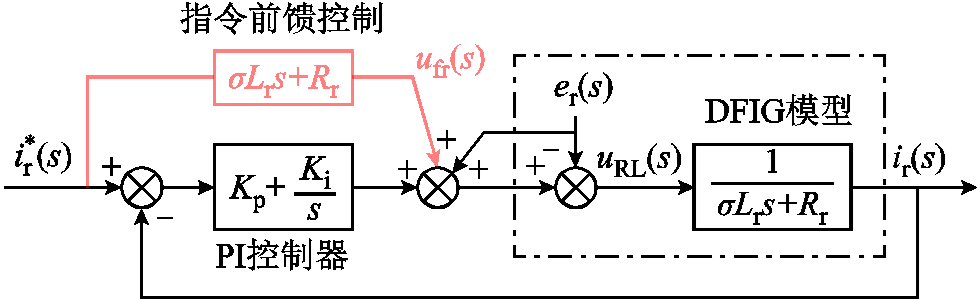
图14 电流指令前馈控制方法
Fig.14 Feedforward current reference control method
表5 典型多频电流跟踪方法的对比
Tab.5 Comparison of typical current control methods

控制方法控制精度设计实施动态响应鲁棒性 多坐标系PI控制[70-71]★☆☆★☆☆★☆☆★★☆ PIR控制[72-73]★★★★★☆★★☆★★☆ 指令前馈控制[74]★★★★★★★★★★★★
从改进控制环节上看,故障穿越控制主要可以分为四类:修改控制器、优化被控对象、优化前馈项和优化控制指令。根据前述分析,本节从暂态控制性能和方法实施难度两个维度,对前述四类故障穿越控制方法进行了综合性对比,见表6。其中,暂态控制性能是评估故障穿越性能的主要因素,包括转子电压(影响系统可控性)、转子电流(影响风机安全性)、定子磁链衰减速率(影响电网支撑性)、电磁转矩脉动(影响轴系可靠性)和输出无功特性(影响电网稳定性)等五大指标。此外,从工程实施应用角度,还引入实施难度、鲁棒性、是否需要磁链观测及相序分离等评价指标。
表6 现有故障穿越控制方法的综合性能对比
Tab.6 Comprehensive performance comparison of the existing FRT control methods
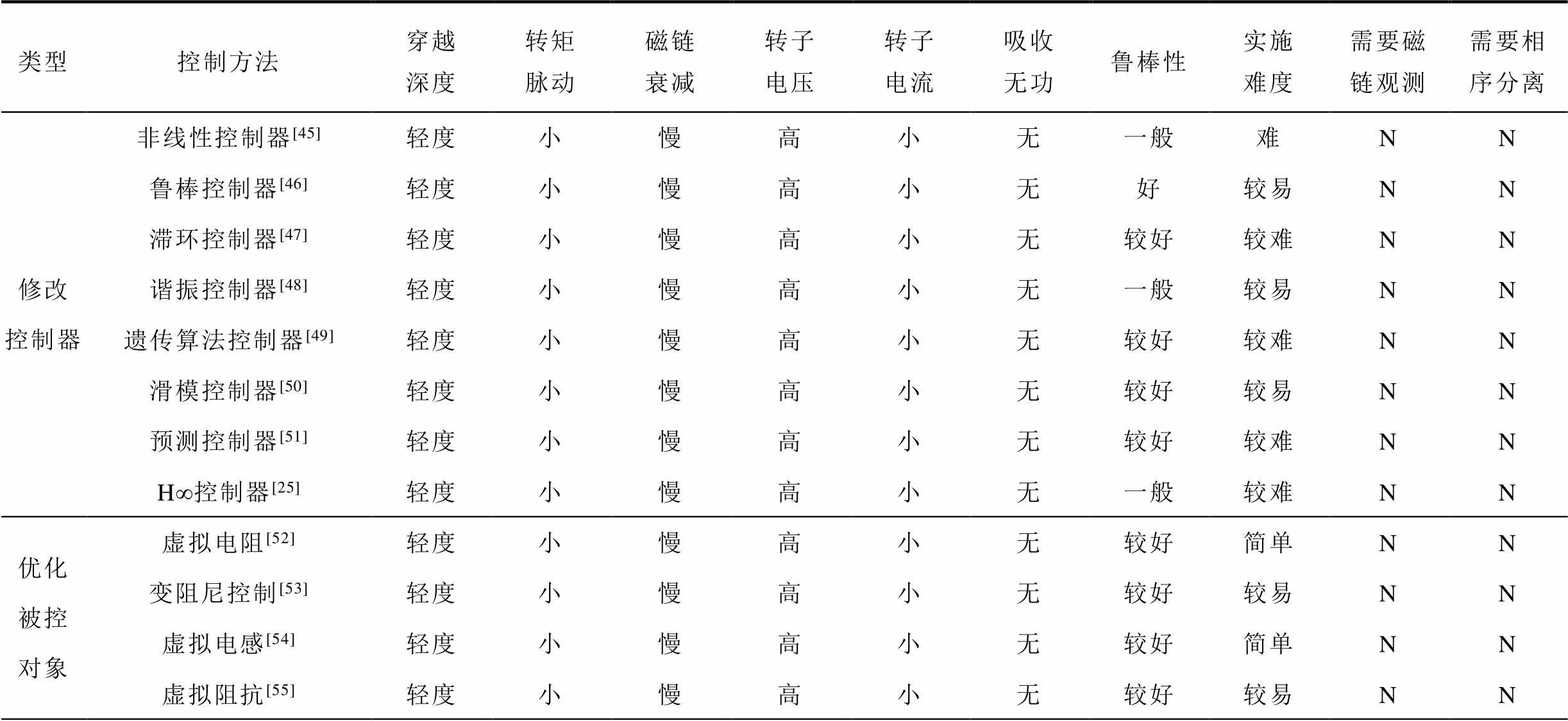
类型控制方法穿越深度转矩脉动磁链衰减转子电压转子电流吸收无功鲁棒性实施难度需要磁链观测需要相序分离 修改控制器非线性控制器[45]轻度小慢高小无一般难NN 鲁棒控制器[46]轻度小慢高小无好较易NN 滞环控制器[47]轻度小慢高小无较好较难NN 谐振控制器[48]轻度小慢高小无一般较易NN 遗传算法控制器[49]轻度小慢高小无较好较难NN 滑模控制器[50]轻度小慢高小无较好较易NN 预测控制器[51]轻度小慢高小无较好较难NN H∞控制器[25]轻度小慢高小无一般较难NN 优化被控对象虚拟电阻[52]轻度小慢高小无较好简单NN 变阻尼控制[53]轻度小慢高小无较好较易NN 虚拟电感[54]轻度小慢高小无较好简单NN 虚拟阻抗[55]轻度小慢高小无较好较易NN
(续)
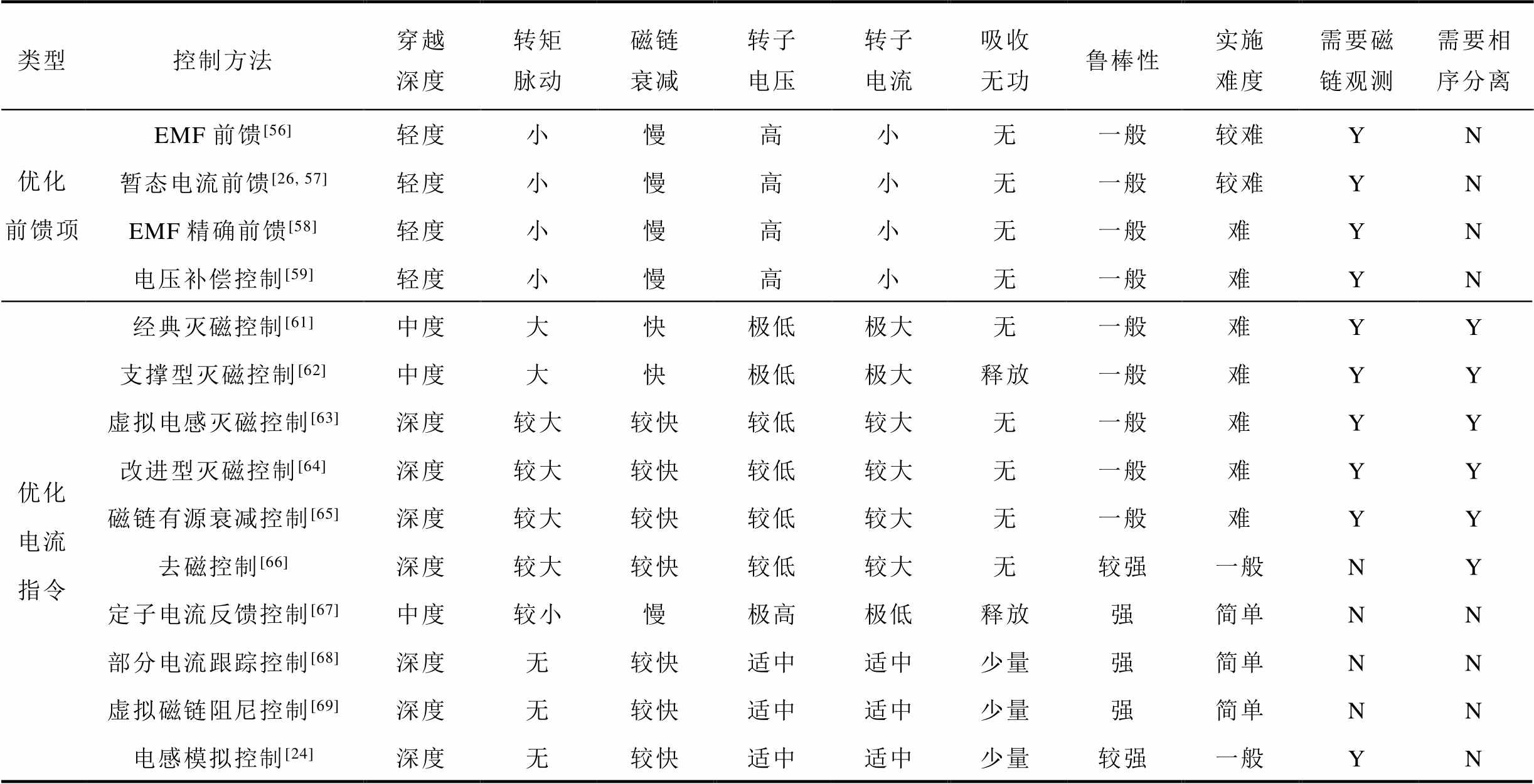
类型控制方法穿越深度转矩脉动磁链衰减转子电压转子电流吸收无功鲁棒性实施难度需要磁链观测需要相序分离 优化前馈项EMF前馈[56]轻度小慢高小无一般较难YN 暂态电流前馈[26, 57]轻度小慢高小无一般较难YN EMF精确前馈[58]轻度小慢高小无一般难YN 电压补偿控制[59]轻度小慢高小无一般难YN 优化电流指令经典灭磁控制[61]中度大快极低极大无一般难YY 支撑型灭磁控制[62]中度大快极低极大释放一般难YY 虚拟电感灭磁控制[63][[kongzhi[63][60][63][63][63][61][63]深度较大较快较低较大无一般难YY 改进型灭磁控制[64]深度较大较快较低较大无一般难YY 磁链有源衰减控制[65]深度较大较快较低较大无一般难YY 去磁控制[66]深度较大较快较低较大无较强一般NY 定子电流反馈控制[67]中度较小慢极高极低释放强简单NN 部分电流跟踪控制[68]深度无较快适中适中少量强简单NN 虚拟磁链阻尼控制[69]深度无较快适中适中少量强简单NN 电感模拟控制[24]深度无较快适中适中少量较强一般YN
注:Y代表“需要”,N代表“不需要”,吸收无功指双馈风电机组是否从电网中吸收无功。
由表6可以看出,维持指令型故障穿越控制方法可以抑制暂态过电流,但是需要输出较大的转子电压以抵消EMF,主要适用于电网轻度故障。优化指令型故障穿越控制方法可以同时降低转子暂态电流及电压需求,更适合电网严重故障。综合而言,每种故障穿越控制方法各有优缺,可取长补短,结合实际需求来综合应用。
以我国最新的风电并网标准GB/T 19963—2021为例,在故障穿越技术要求的更新之处主要包括:①在不脱网运行方面,新增了高电压穿越和连续故障穿越的技术要求;②在无功支撑方面,提高了无功响应时间(75ms提升至60ms),新增了负序无功电流要求。可以看出,新国标对故障穿越类型和无功支撑能力均提出了更高的技术要求,双馈风电机组故障穿越控制技术的升级改造十分迫切。
虽然国内外学者已提出多种故障穿越控制方法,但大多针对低电压故障,能否转化用于高电压故障和连续故障工况仍有待进一步研究。并且电网电压的骤升和连续波动往往出现在低电压穿越之后,低电压穿越控制会对后续阶段的暂态特性和控制设计产生重要影响[75],因此需要对整个穿越过程进行统一建模、综合分析与协同控制,这将是未来故障穿越技术的研究热点和重要发展趋势。此外,随着电网标准对负序无功电流和无功响应时间等技术要求的日益严苛,如何充分利用变换器容量来优化分配转子电流的正序、自由和负序分量,提出可协同实现抑制故障电流、快速衰减磁链和负序电流支撑等多重目标的新型故障穿越控制方法,将是另一个重要发展趋势。值得说明的是,考虑到双馈风电机组的变换器容量有限,对故障穿越控制与风机硬件参数进行协同设计也许是破解上述难题的另一把“金钥匙”,或者将故障穿越控制与硬件保护/无功补偿装置相结合以实现取长补短,也可能是未来故障穿越技术的重要发展趋势。
由于我国风能资源与负荷中心在地理上呈逆向分布,大型风电场大多位于电网末端的“三北”地区,且广泛采用远距离输送的风电消纳模式,因此弱电网是风电机组面临的典型场景之一[76]。然而,风电机组与弱电网会通过并网点电压产生复杂的交互作用,易于造成风电机组在正常运行工况下小扰动失稳[77]和电网故障工况下暂态失稳[78],如图15所示。此外,相比于小扰动失稳,暂态失稳问题更为复杂,这是由于故障穿越控制和电网电压跌落会进一步加剧交互耦合作用,并且需要考虑非线性的影响。目前,双馈风电机组的故障穿越控制均严重依赖强电网条件,在弱电网场景下存在暂态失稳风险,可能导致故障穿越控制失效而保护脱网。因此,研究弱电网下计及暂态稳定性约束的新型故障穿越控制方法具有重要的研究价值与现实意义。
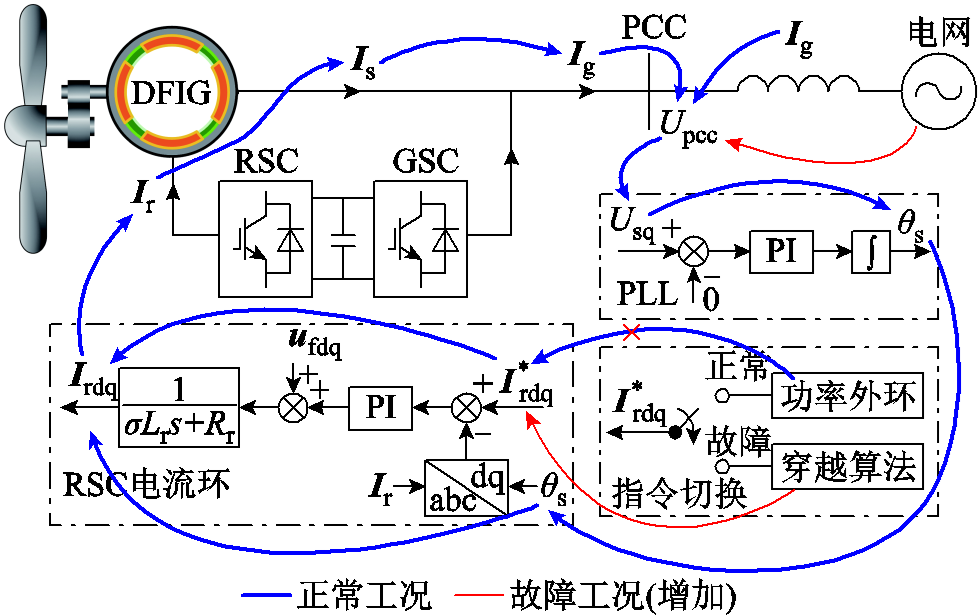
图15 双馈风电机组与弱电网交互作用的示意图
Fig.15 Schematic diagram of the interaction between DFIG-based wind turbine and weak grid
建设千万kW级大型陆上/海上风电基地,利用超高压直流送出是我国风电开发利用的主要形式。目前,我国已投运的直流输电工程仍以电网换相换流器型高压直流(Line-Commutated Converter High Voltage Direct Current, LCC-HVDC)为主[79]。然而,LCC-HVDC在受端电网故障下易发生换相失败问题,此时风电场与直流系统之间会出现不平衡的无功交换,将导致送端交流电压呈现出“先降后升”且电压幅值连续变化的复杂特性[80-81],易于导致风机故障穿越失败并造成风电连锁脱网,但以往的风机故障穿越控制鲜有考虑该工况。因此,LCC-HVDC换相失败对双馈风机的故障穿越控制技术形成了巨大考验,这将是未来重要的研究方向之一。
此外,随着柔性直流输电技术的快速发展与进步,风电经柔性直流送出方案已被广泛应用于在建工程,在受端交流侧故障或直流侧故障下双馈风机与柔性直流系统的联合故障穿越技术也将是后续重要发展趋势。
风电机组广泛采用基于锁相同步的矢量控制方法,不具备传统同步发电机的惯量和阻尼特性,难以对电网提供有效的频率和电压支撑。为此,借鉴大电网百余年形成的同步运行机制,虚拟同步控制技术应运而生[82],它通过模拟传统同步机的运动方程来提供虚拟惯量和阻尼,进而可以主动参与系统调节,提高新型电力系统的电压和频率稳定性。因此,虚拟同步控制技术也被认为是风电机组友好并网控制技术的重要发展趋势之一。然而,对于虚拟同步控制的双馈风电机组而言,其转子电压幅值将由端电压或无功控制为目标的励磁控制调节产生,无法在电网故障时快速生成适当的转子电压以抵消EMF扰动,进而易于出现暂态过电流问题[83]。此外,为模拟同步机的转子运动方程,虚拟同步控制通常被设计为慢动态响应特性,进而难以在故障穿越期间快速提供无功电流,以支撑电网电压的恢复。因此,过电流抑制能力差和快速无功支撑能力弱是虚拟同步控制下双馈风电机组故障穿越面临的严峻挑战,可以预见随着虚拟同步控制的快速发展与广泛应用,其故障穿越技术将成为另一个研究热点。
无撬棒故障穿越技术是双馈风电机组适应日益严苛电网标准的重要举措,已成为国际并网控制领域的研究前沿与热点。为此,本文针对双馈风电机组的无撬棒故障穿越技术展开综述,梳理了国内外相关电网标准和技术现状,探讨了未来的技术发展趋势,主要研究结论总结如下:
1)电网标准中故障穿越相关技术要求主要分为不脱网运行与无功支撑两类。虽然各主要国家的具体技术指标不尽相同,但是要求都是越来越严,例如:要求穿越的故障深度和类型越来越多,需要提供的无功支撑能力也越来越高。
2)双馈风电机组实现无撬棒故障穿越控制的技术要点关键在于:①有限变换器容量约束下暂态控制指令的准确设计;②多种频率共存和高EMF工况下暂态控制指令的精确实施。
3)从故障前后电流指令是否一致的角度上看,已有故障穿越控制方法主要分为维持指令型和优化指令型故障穿越控制方法两类,其中前者的优化思路主要有修改控制器、优化被控对象和优化前馈项三种。此外,前者主要适用于轻度电网故障,后者更适合严重电网故障。
4)从新的技术规范、新的运行场景和新的控制模式等三个层面上看,预测无撬棒故障穿越控制技术的未来发展趋势和研究热点主要有:面向高电压/连续故障穿越、快速无功响应与负序无功支撑等技术要求下故障穿越控制的优化,适应弱电网和直流送出场景的新型故障穿越控制方法,虚拟同步控制下双馈风电机组的新型故障穿越控制技术。
参考文献
[1] 陈鹏伟, 戚陈陈, 陈新, 等. 附加频率控制双馈风电场频率响应特性建模与参数辨识[J]. 电工技术学报, 2021, 36(15): 3293-3307.
Chen Pengwei, Qi Chenchen, Chen Xin, et al. Frequency response modeling and parameter identification of doubly-fed wind farm with additional frequency control[J]. Transactions of China Electrotechnical Society, 2021, 36(15): 3293-3307.
[2] Global Wind Energy Council (GWEC). Global Wind Report 2022 [EB/OL]. https://gwec.net/global-wind- report-2022, 2022-04-08.
[3] 每日经济新闻. 风电企业联合发布《风能北京宣言》:2030年总装机容量至少达8亿千瓦[EB/OL], https://www.sohu.com/a/424613259_115362, 2020-10-14.
[4] 陈鉴庆, 邹旭东, 梁宗泽, 等. 基于反向电流跟踪的双馈风机低电压穿越控制策略[J]. 电工技术学报, 2016, 31(2): 221-229.
Chen Jianqing, Zou Xudong, Liang Zongze, et al. An improved control strategy of doubly-fed wind turbine under voltage dips based on reverse current tracking[J]. Transactions of China Electrotechnical Society, 2016, 31(2): 221-229.
[5] 汪宁渤, 马彦宏, 丁坤, 等. 酒泉风电基地脱网事故频发的原因分析[J]. 电力系统自动化, 2012, 36(19): 42-46.
Wang Ningbo, Ma Yanhong, Ding Kun, et al. Analysis on root reasons of WTGs nuisance tripping in Jiuquan wind power base[J]. Automation of Electric Power Systems, 2012, 36(19): 42-46.
[6] 国家电力监管委员会.关于近期三起风电机组大规模脱网事故的通报[EB/OL]. http://www.gov.cn/ gzdt/2011-05/06/content_1859103.htm,2011-5-6.
[7] 中国经营报. 风机脱网事故频发风电业或临20亿元改造账单[EB/OL]. https://www.in-en.com/ finance/html/energy-1014141.shtml, 2011-5-16.
[8] 杜剑行, 朱冬雪. 张北地区风电汇集区域风机脱网问题探讨[J]. 华北电力技术, 2017(9): 49-54.
Du Jianxing, Zhu Dongxue. Discussion on wind turbine off-grid problem in Zhangbei[J]. North China Electric Power, 2017(9): 49-54.
[9] Australian Energy Market Operator (AEMO).Black system south Australia 28 September 2016–integrated final report[EB/OL]. http://www.aemo.com. au/-/media/Files/Electricity/NEM/Market_Notices_and_ Events/Power_System_Incident_Reports/2017/ IntegratedFinal-Report-SA-Black-System-28-September-2016.pdf, 2016-9-28.
[10] 北京国际风能大会暨展览会组委会. 风电回顾与展望2021[R]. 2021.
[11] Morren J, de Haan S W H. Ride through of wind turbines with doubly-fed induction generator during a voltage dip[J]. IEEE Transactions on Energy Conversion, 2005, 20(2): 435-441.
[12] Pannell G, Zahawi B, Atkinson D J, et al. Evaluation of the performance of a DC-link brake chopper as a DFIG low-voltage fault-ride-through device[J]. IEEE Transactions on Energy Conversion, 2013, 28(3): 535-542.
[13] Xiao Xianyong, Yang Ruohuan, Zheng Zixuan, et al. Cooperative rotor-side SMES and transient control for improving the LVRT capability of grid-connected DFIG-based wind farm[J]. IEEE Transactions on Applied Superconductivity, 2019, 29(2): 1-5.
[14] Zhu Rongwu, Deng Fujin, Chen Zhe, et al. Enhanced control of DFIG wind turbine based on stator flux decay compensation[J]. IEEE Transactions on Energy Conversion, 2016, 31(4): 1366-1376.
[15] 姚骏, 郭利莎, 曾欣, 等. 采用串联网侧变换器的双馈风电系统不对称高电压穿越控制研究[J]. 电网技术, 2016(7): 2067-2074.
Yao Jun, Guo Lisha, Zeng Xin, et al. Research on HVRT control of DFIG system based on series grid-side converter during asymmetrical grid voltage swell[J]. Power System Technology, 2016(7): 2067-2074.
[16] Firouzi M, Gharehpetian G B. LVRT performance enhancement of DFIG-based wind farms by capacitive bridge-type fault current limiter[J]. IEEE Transactions on Sustainable Energy, 2018, 9(3): 1118-1125.
[17] Yang Ruohuan, Jin Jianxun. Unified power quality conditioner with advanced dual control for performance improvement of DFIG-based wind farm[J]. IEEE Transactions on Sustainable Energy, 2021, 12(1): 116-126.
[18] Zou Xudong, Zhu Donghai, Hu Jiabing, et al. Mechanism analysis of the required rotor current and voltage for DFIG-based WTs to ride-through severe symmetrical grid faults[J]. IEEE Transactions on Power Electronics, 2018, 33(9): 7300-7304.
[19] Zhu Rongwu, Chen Zhe, Wu Xiaojie. Dynamic performance of doubly-fed induction generator stator flux during consecutive grid voltage variations[J]. IET Renewable Power Generation, 2015, 9: 720-728.
[20] Ma Yumei, Zhu Donghai, Zou Xudong, et al. Transient characteristics and quantitative analysis of electromotive force for DFIG-based wind turbines during grid faults[J]. Chinese Journal of Electrical Engineering, 2022, 8(2): 3-12.
[21] Zhou Shiying, Zhu Donghai, Yang Yihang, et al. Analysis and assessment of stator flux attenuation time-scales of type-3 wind turbines with different LVRT control modes[C]//2020 IEEE 9th International Power Electronics and Motion Control Conference. Nanjing, China, 2020: 1162-1166.
[22] 马玉梅, 黄清军, 朱东海, 等. 计及变换器输出电压约束的双馈风电机组故障电流特性分析[J]. 电网技术, 2021, 45(11): 4233-4241.
Ma Yumei, Huang Qingjun, Zhu Donghai, et al. Fault current characteristic analysis for DFIG-based wind turbine considering voltage constraint of power converter[J]. Power System Technology, 2021, 45(11): 4233-4241.
[23] Villegas Pico H N, Aliprantis D C. Voltage ride-through capability verification of DFIG-based wind turbines using reachability analysis[J]. IEEE Transactions on Energy Conversion, 2016, 31(4): 1387-1398.
[24] Zhu D, Zou X, Deng L, et al. Inductance-emulating control for DFIG-based wind turbine to ride-through grid faults[J]. IEEE Transactions on Power Electronics, 2017, 32(11): 8514-8525.
[25] Wang Y, Wu Q, Gong W, et al. H∞ Robust current control for DFIG-based wind turbine subject to grid voltage distortions[J]. IEEE Transactions on Sustainable Energy, 2017, 8(2): 816-825.
[26] Liang Jiaqi, Howard D F, Restrepo J A, et al. Feedforward transient compensation control for DFIG wind turbines during both balanced and unbalanced grid disturbances[J]. IEEE Transactions on Industry Applications, 2013, 49(3): 1452-1463.
[27] 杨淑英, 杨浩, 张兴, 等. 非对称故障情况下双馈电机虚拟电感自灭磁控制算法研究[J]. 太阳能学报, 2018, 39(7): 2044-2051.
Yang Shuying, Yang Hao, Zhang Xing, et al. Study on virtual inductance-based self-demagnetization algorithm for dfig under asymmetrical grid faults[J]. Acta Energiae Solaris Sinica, 2018, 39(7): 2044-2051.
[28] Xiao Shuai, Yang Geng, Zhou Honglin, et al. An LVRT control strategy based on flux linkage tracking for DFIG-based WECS[J]. IEEE Transactions on Industrial Electronics, 2013, 60(7): 2820-2832.
[29] Tsili M, Papathanassiou S. A review of grid code technical requirements for wind farms[J]. IET Renewable Power Generation, 2009, 3(3): 308.
[30] 贺益康, 胡家兵. 双馈异步风力发电机并网运行中的几个热点问题[J]. 中国电机工程学报, 2012, 32(27): 1-15.
He Yikang, Hu Jiabing. Several hot-spot issues associated with the grid-connected operations of wind-turbine driven doubly fed induction generators[J]. Proceedings of the CSEE, 2012, 32(27): 1-15.
[31] 王涛, 诸自强, 年珩. 非理想电网下双馈风力发电系统运行技术综述[J]. 电工技术学报, 2020, 35(3): 455-471.
Wang Tao, Zhu Ziqiang, Nian Heng. Review of operation technology of doubly-fed induction generator-based wind power system under nonideal grid conditions[J]. Transactions of China Electrotechnical Society, 2020, 35(3): 455-471.
[32] 贺益康, 周鹏. 变速恒频双馈异步风力发电系统低电压穿越技术综述[J]. 电工技术学报, 2009, 24(9): 140-146.
He Yikang, Zhou Peng. Overview of the low voltage ride-through technology for variable speed constant frequency doubly fed wind power generation systems[J]. Transactions of China Electrotechnical Society, 2009, 24(9): 140-146.
[33] Abdul Basit B, Nguyen A T, Ryu S W, et al. A state-of-the-art comprehensive review of modern control techniques for grid-connected wind turbines and photovoltaic arrays distributed generation systems[J]. IET Renewable Power Generation, 2022, 16(11): 2191-2222.
[34] 国家市场监督管理总局, 国家标准化管理委员会. GB/T 19963.1—2021风电场接入电力系统技术规定第1部分:陆上风电[S]. 北京: 中国标准出版社, 2021.
[35] Energinet. Technical regulation 3.2.5 for wind power plants above 11 kW [S]. https://en.energinet.dk/ Electricity/Rules-and-Regulations/Regulations-for-grid-connection, 2016.
[36] National Grid Electricity System Operator. The grid code-issue 6, revision 13[S]. https://www. national-grideso.com/industry-information/codes/grid-code/code- documents, 2021.
[37] TenneT. Grid Code-High and Extra-High Voltage[S]. https://docplayer.net/17055474-Grid-code-high-and-extra-high-voltage-tennet-tso-gmbh-bernecker-strasse-70-95448-bayreuth.html, 2012.
[38] North American Electric Reliability Corporation (NERC). Reliability standards for the bulk electric systems of north America[S]. https://www.nerc.com/ pa/Stand/Reliability%20Standards%20Complete%20Set/RSCompleteSet.pdf, 2021.
[39] EirGrid. EirGrid grid code, version 10[S]. https:// www.eirgrid. com, 2021.
[40] Hydro-Québec. Technical requirements for the connection of generating stations to the hydro-québec transmission system[S]. https://www.hydroquebec. com/transenergie/en/connecting-to-hydroquebec-system. html, 2019.
[41] Australian Energy Market Commission (AEMC). National electricity rules version 179[S]. https:// energy-rules.aemc.gov.au/ner/379, 2022.
[42] The Institute of Electrical and Electronics Engineers (IEEE). IEEE standard for interconnection and interoperability of inverter-based resources (IBRs) interconnecting with associated transmission electric power systems[S]. https://standards.ieee.org/project/ 2800.html, 2022.
[43] Agha Kashkooli M R, Madani S M, Lipo T A. Improved direct torque control for a DFIG under symmetrical voltage dip with transient flux damping[J]. IEEE Transactions on Industrial Electronics, 2020, 67(1): 28-37.
[44] Zhu Donghai, Zou Xudong, Dong Wen, et al. Disturbance feedforward control for type-3 wind turbines to achieve accurate implementation of transient control targets during LVRT[J]. International Journal of Electrical Power & Energy Systems, 2020, 119: 105954.
[45] Rahimi M, Parniani M. Transient performance improvement of wind turbines with doubly fed induction generators using nonlinear control strategy[J]. IEEE Transactions on Energy Conversion, 2010, 25(2): 514-525.
[46] da Costa J P, Pinheiro H, Degner T, et al. Robust controller for DFIGs of grid-connected wind turbines[J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4023-4038.
[47] Mohseni M, Islam S, Masoum M A S. Fault ride-through capability enhancement of doubly-fed induction wind generators[J]. IET Renewable Power Generation, 2011, 5(5): 368.
[48] 张禄, 金新民, 唐芬, 等. 电网电压对称跌落下的双馈感应发电机PI-R控制及改进[J]. 中国电机工程学报, 2013, 33(3): 106-116, 9.
Zhang Lu, Jin Xinmin, Tang Fen, et al. Improved PI-R control for doubly fed induction generators under grid voltage symmetrical dip[J]. Proceedings of the CSEE, 2013, 33(3): 106-116, 9.
[49] Vrionis T D, Koutiva X I, Vovos N A. A genetic algorithm-based low voltage ride-through control strategy for grid connected doubly fed induction wind generators[J]. IEEE Transactions on Power Systems, 2014, 29(3): 1325-1334.
[50] Sun Dan, Wang Xiaohe, Nian Heng, et al. A sliding-mode direct power control strategy for DFIG under both balanced and unbalanced grid conditions using extended active power[J]. IEEE Transactions on Power Electronics, 2018, 33(2): 1313-1322.
[51] Taveiros F E V, Barros L S, Costa F B. Heightened state-feedback predictive control for DFIG-based wind turbines to enhance its LVRT performance[J]. International Journal of Electrical Power & Energy Systems, 2019, 104: 943-956.
[52] 程鹏, 年珩, 诸自强. 电网对称故障时双馈电机虚拟电阻控制技术[J]. 电机与控制学报, 2014, 18(6): 1-8.
Cheng Peng, Nian Heng, Zhu Ziqiang. Control technique of DFIG based on virtual resistance under symmetrical grid fault[J]. Electric Machines and Control, 2014, 18(6): 1-8.
[53] 谢震, 张兴, 宋海华, 等. 电网电压骤升故障下双馈风力发电机变阻尼控制策略[J]. 电力系统自动化, 2012, 36(3): 39-46.
Xie Zhen, Zhang Xing, Song Haihua, et al. Variable damping based control strategy of doubly fed induction generator based wind turbines under grid voltage swell[J]. Automation of Electric Power Systems, 2012, 36(3): 39-46.
[54] 杨淑英, 陈银, 周天保, 等. 低电压穿越过程中双馈风电机组虚拟电感暂态自灭磁控制[J]. 电力系统自动化, 2015, 39(4): 12-18.
Yang Shuying, Chen Yin, Zhou Tianbao, et al. Virtual inductance based self-demagnetization control for doubly-fed induction generator wind turbines during low voltage ride-through process[J]. Automation of Electric Power Systems, 2015, 39(4): 12-18.
[55] Xie Zhen, Zhang Xuguang, Zhang Xing, et al. Improved ride-through control of DFIG during grid voltage swell[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3584-3594.
[56] 胡家兵, 孙丹, 贺益康, 等. 电网电压骤降故障下双馈风力发电机建模与控制[J]. 电力系统自动化, 2006, 30(8): 21-26.
Hu Jiabing, Sun Dan, He Yikang, et al. Modeling and control of DFIG wind energy generation system under grid voltage dip[J]. Automation of Electric Power Systems, 2006, 30(8): 21-26.
[57] Rafiee Z, Heydari R, Rafiee M, et al. Enhancement of the LVRT capability for DFIG-based wind farms based on short-circuit capacity[J]. IEEE Systems Journal, 2022, 16(2): 3237-3248.
[58] Zhu Rongwu, Chen Zhe, Tang Yi, et al. Dual-loop control strategy for DFIG-based wind turbines under grid voltage disturbances[J]. IEEE Transactions on Power Electronics, 2016, 31(3): 2239-2253.
[59] 朱晓荣, 刘世鹏, 王毅. 电网电压对称故障时双馈风电机组转子电压补偿控制策略[J]. 高电压技术, 2016, 42(10): 3280-3288.
Zhu Xiaorong, Liu Shipeng, Wang Yi. Rotor voltage compensation control strategy for doubly fed induction generators during balanced voltage fault[J]. High Voltage Engineering, 2016, 42(10): 3280-3288.
[60] Hu Jiabing, He Yikang. DFIG wind generation systems operating with limited converter rating considered under unbalanced network conditions-analysis and control design[J]. Renewable Energy, 2011, 36(2): 829-847.
[61] Xiang Dawei, Ran Li, Tavner P J, et al. Control of a doubly fed induction generator in a wind turbine during grid fault ride-through[J]. IEEE Transactions on Energy Conversion, 2006, 21(3): 652-662.
[62] Shen Yangwu, Ke Deping, Qiao Wei, et al. Transient reconfiguration and coordinated control for power converters to enhance the LVRT of a DFIG wind turbine with an energy storage device[J]. IEEE Transactions on Energy Conversion, 2015, 30(4): 1679-1690.
[63] Hu Sheng, Lin Xinchun, Kang Yong, et al. An improved low-voltage ride-through control strategy of doubly fed induction generator during grid faults[J]. IEEE Transactions on Power Electronics, 2011, 26(12): 3653-3665.
[64] Zhou Dao, Blaabjerg F. Optimized demagnetizing control of DFIG power converter for reduced thermal stress during symmetrical grid fault[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10326-10340.
[65] 张禄, 金新民, 战亮宇, 等. 电网电压对称跌落下的双馈感应风力发电机磁链有源衰减控制[J]. 电工技术学报, 2012, 27(9): 191-197.
Zhang Lu, Jin Xinmin, Zhan Liangyu, et al. Flux active damping control of the doubly fed induction generator under grid voltage symmetrical dip[J]. Transactions of China Electrotechnical Society, 2012, 27(9): 191-197.
[66] Zhou Linyuan, Liu Jinjun, Zhou Sizhan. Improved demagnetization control of a doubly-fed induction generator under balanced grid fault[J]. IEEE Transactions on Power Electronics, 2015, 30(12): 6695-6705.
[67] Lima F K A, Luna A, Rodriguez P, et al. Rotor voltage dynamics in the doubly fed induction generator during grid faults[J]. IEEE Transactions on Power Electronics, 2010, 25(1): 118-130.
[68] Huang Qingjun, Zou Xudong, Zhu Donghai, et al. Scaled current tracking control for doubly fed induction generator to ride-through serious grid faults[J]. IEEE Transactions on Power Electronics, 2016, 31(3): 2150-2165.
[69] Zhu Rongwu, Chen Zhe, Wu Xiaojie, et al. Virtual damping flux-based LVRT control for DFIG-based wind turbine[J]. IEEE Transactions on Energy Conversion, 2015, 30(2): 714-725.
[70] Reyes M, Rodríguez P, Vázquez S, et al. Decoupled double synchronous reference frame current controller for unbalanced grid voltage conditions[C]//2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 2012: 4676-4682.
[71] Geng Hua, Liu Cong, Yang Geng. LVRT capability of DFIG-based WECS under asymmetrical grid fault condition[J]. IEEE Transactions on Industrial Electronics, 2013, 60(6): 2495-2509.
[72] Hu Jiabing, He Yikang, Xu Lie, et al. Improved control of DFIG systems during network unbalance using PI-R current regulators[J]. IEEE Transactions on Industrial Electronics, 2009, 56(2): 439-451.
[73] Liserre M, Teodorescu R, Blaabjerg F. Multiple harmonics control for three-phase grid converter systems with the use of PI-RES current controller in a rotating frame[J]. IEEE Transactions on Power Electronics, 2006, 21(3): 836-841.
[74] Zhu Donghai, Zou Xudong, Zhou Shiying, et al. Feedforward current references control for DFIG-based wind turbine to improve transient control performance during grid faults[J]. IEEE Transactions on Energy Conversion, 2018, 33(2): 670-681.
[75] Chen Wenjie, Xu Dehong, Zhu Nan, et al. Control of doubly-fed induction generator to ride-through recurring grid faults[J]. IEEE Transactions on Power Electronics, 2016, 31(7): 4831-4846.
[76] 李光辉, 王伟胜, 刘纯, 等. 直驱风电场接入弱电网宽频带振荡机理与抑制方法(一):宽频带阻抗特性与振荡机理分析[J]. 中国电机工程学报, 2019, 39(22): 6547-6561.
Li Guanghui, Wang Weisheng, Liu Chun, et al. Mechanism analysis and suppression method of wideband oscillation of PMSG wind farms connected to weak grid (partⅠ): analysis of wideband impedance characteristics and oscillation mechanism[J]. Proceedings of the CSEE, 2019, 39(22): 6547-6561.
[77] 徐海亮, 吴瀚, 李志, 等. 低短路比电网下含负序控制双馈风机稳定性研究的几个关键问题[J]. 电工技术学报, 2021, 36(22): 4688-4702.
Xu Hailiang, Wu Han, Li Zhi, et al. Several key issues on stability study of DFIG-based wind turbines with negative sequence control during low short-circuit ratio power grids[J]. Transactions of China Electrotechnical Society, 2021, 36(22): 4688-4702.
[78] Yang Yihang, Zhu Donghai, Zou Xudong, et al. Power compensation control for DFIG-based wind turbines to enhance synchronization stability during severe grid faults[J]. IEEE Transactions on Power Electronics, 2022, 37(9): 10139-10143.
[79] 郭春义, 吕乃航, 张加卿. 提高LCC-HVDC在弱交流系统下的稳定性和动态性能的控制参数优化方法[J/OL]. 电工技术学报, 2022. DOI:1019595/j.cnki. 1000-6753.tces.
Guo Chunyi, Lü Naihang, Zhang Jiaqing, et al. Optimization of control parameters to enhance stability and dynamic performance of LCC-HVDC under weak AC condition[J/OL]. Transactions of China Electrotechnical Society, 2022. DOI:1019595/j.cnki. 1000-6753.tces.
[80] Zheng Zixuan, Ren Jie, Xiao Xianyong, et al. Response mechanism of DFIG to transient voltage disturbance under commutation failure of LCC-HVDC system[J]. IEEE Transactions on Power Delivery, 2020, 35(6): 2972-2979.
[81] Zhang Tian, Yao Jun, Sun Peng, et al. Improved continuous fault ride through control strategy of DFIG-based wind turbine during commutation failure in the LCC-HVDC transmission system[J]. IEEE Transactions on Power Electronics, 2021, 36(1): 459-473.
[82] 马伟明. 关于电工学科前沿技术发展的若干思考[J]. 电工技术学报, 2021, 36(22): 4627-4636.
Ma Weiming. Thoughts on the development of frontier technology in electrical engineering[J]. Transactions of China Electrotechnical Society, 2021, 36(22): 4627-4636.
[83] Wang Shuo, Shang Lei. Fault ride through strategy of virtual-synchronous-controlled DFIG-based wind turbines under symmetrical grid faults[J]. IEEE Transactions on Energy Conversion, 2020, 35(3): 1360-1371.
Review of Crowbarless Fault Ride Through Technology for Doubly-Fed Induction Generator-Based Wind Turbines
Abstract The failure of fault ride through (FRT) will lead to large-scale chain off-grid accidents of wind power, which seriously threatens the safe and stable operation of modern power system. For doubly-fed induction generator (DFIG)-based wind turbines, the crowbar circuit is widely used to realize FRT. Nevertheless, this scheme has some inherent defects, such as the loss of control ability, large torque ripple, and excessive reactive power absorption, etc., and it is difficult to adapt to increasingly strict grid standards. In recent years, many scholars have carried out extensive research on crowbar-less FRT technology and proposed a series of FRT control methods. However, there are few works dedicated to summarizing and analyzing this topic. For this issue, this paper presents a comprehensive review of crowbar-less FRT technology for DFIG-based wind turbines. Firstly, the latest technical specifications related to FRT in the grid code of various countries are summarized. Then, the technical points and state quo of crowbar-less FRT technology are sorted out and compared. Finally, the future research and development direction is discussed and prospected from the aspects of new technical specifications, new operation scenarios and new control modes of wind turbines.
keywords:Doubly-fed induction generator (DFIG)-based wind turbines, crowbar-less, fault ride through (FRT), grid code
DOI:10.19595/j.cnki.1000-6753.tces.221536
中图分类号:TM614
国家自然科学基金(51907072, 52077093)和中央高校基本科研业务费专项经费(2021XXJS004)资助项目。
收稿日期 2022-08-08
改稿日期 2022-08-17
朱东海 男,1991年生,副研究员,博士,研究方向为风电安全并网与稳定控制技术。E-mail:zhudh@hust.edu.cn
邹旭东 男,1974年生,教授,博士生导师,研究方向为新能源并网运行与控制、电力电子变换器等。E-mail:xdzou@mail.hust.edu.cn(通信作者)
(编辑 郭丽军)