图1 脉冲负载交直流供电系统
Fig.1 AC-DC power system for pulsed load
摘要 高峰均比低频脉冲功率负载给机载交直流电源系统的安全稳定运行带来挑战。该文提出面向高峰均比低频脉冲功率负载的脉冲电流补偿器,利用双向AC-DC变换器和小容量储能电容实现高峰均比脉冲负载电流与交流源输出电流的解耦,同时实现低频脉动电流和高频谐波电流补偿,使得交流源仅需提供平稳的负载平均功率。为了改善脉冲电流补偿器对脉冲负载电流的补偿精度,减小解耦电容电压在脉冲负载功率突变时的过冲和跌落,提出了解耦电容电压和脉冲电流基准前馈相结合的控制方法。该文详细分析脉冲电流补偿器的工作原理和特性,并通过实验验证了所提出的脉冲电流补偿器及其控制方法的有效性。
关键词:脉冲电源 脉冲电流补偿器 双向交直流变换器 前馈控制
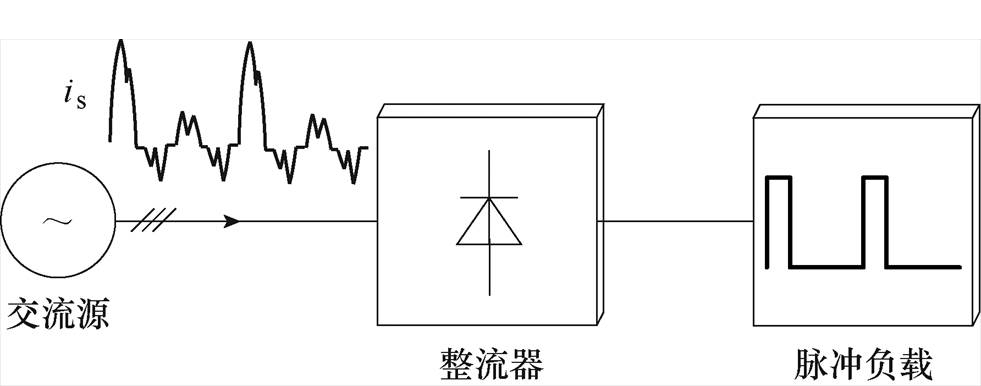
多电/全电飞机是当前航空技术发展的主要方向[1-2]。相比于传统飞机,多电/全电飞机发电机功率容量明显增加,这为搭载诸如大功率相控阵雷达、电子战装备等新型机载电子装备创造了条件[3]。然而,大功率雷达等对于通信、作战等不同模式需求的功率明显不同。同时雷达收发组件在信号接收模式功率很小,但在信号发射模式功率很大,使其呈现出强脉冲功率负载特性[4-5]:负载峰均功率比甚至能达到10倍以上;脉冲通常在数Hz到数十Hz波动,波动频率低且不固定;脉冲功率起停、切换速度极快,在数十ms内即能实现模式切换。
相比于有源整流,无源整流以其特有的结构简单、可靠性高、效率高的优势而广泛应用于各类装备电源系统[6-7]。针对上述脉冲负载,可以将三相交流源经整流后进行供电,脉冲负载交直流供电系统如图1所示。然而,高峰均比脉冲功率负载的高峰值功率、低频脉动特性将对交直流电源系统造成强谐波电流、电压失稳等一系列问题[8-9]。而负载的低频脉动特性对电源系统形成反复加卸载效应,甚至会造成发电机共振、断轴等严重事故[10-11],严重威胁装备电源系统的安全稳定运行。为了消除高峰均比低频脉冲功率对交流源侧的负面影响,有必要引入脉冲功率主动平抑环节。
图1 脉冲负载交直流供电系统
Fig.1 AC-DC power system for pulsed load
针对单相交直流电源系统中的二次功率脉动问题,国内外学者提出了一系列二次脉动功率主动抑制电路及其控制方法[12-13],其本质是利用双向电路将二次脉动功率转移至电容、电感等储能元件,并利用储能元件电压或电流的大幅波动来减小所需储能元件的体积、质量。根据二次脉动功率主动抑制电路的实现方式,可以是独立的双向直流变换器,也可以与单相逆变器、整流器或者其他直流变换器集成为一体[14-16]。相比于将脉动功率主动抑制电路与整流器、逆变器或者直流变换器集成为一体的方式,采用独立双向直流变换器的解决方案对负载功率波动具有更好的适应性,它不仅适用于单相交直流电源系统二次脉动功率抑制,也适用于负载功率高峰均比低频脉动的直流电源系统[17]。然而,对于图1所示的交直流电源系统,若采用双向直流变换器的脉动功率抑制方案,则双向直流变换器只能并联于负载侧。一方面,受负载侧体积、质量的限制,很难将脉冲功率主动平抑电路与负载就近配置在一起;另一方面,脉动功率主动平抑电路也无法对无源整流器引起的高频谐波进行有效补偿。有源滤波器是应对三相交流系统高频谐波的有效方案[18-19],但不能直接用于高峰值功率低频脉动功率的平抑。
本文提出了兼具高峰均比低频脉动电流和高频谐波电流平抑的电流补偿器,设计了相应的电压电流控制策略,消除了高峰均比低频脉动功率对交流源的负面影响。
图2给出了加入电流补偿器的脉冲负载交直流电源系统。图中,iSx为三相交流源提供的电流,iLx为负载交流侧电流,iCx为电流补偿器输出电流,x= a, b, c,Vdc为负载侧电压,vCs为解耦电容Cs上的 电压。
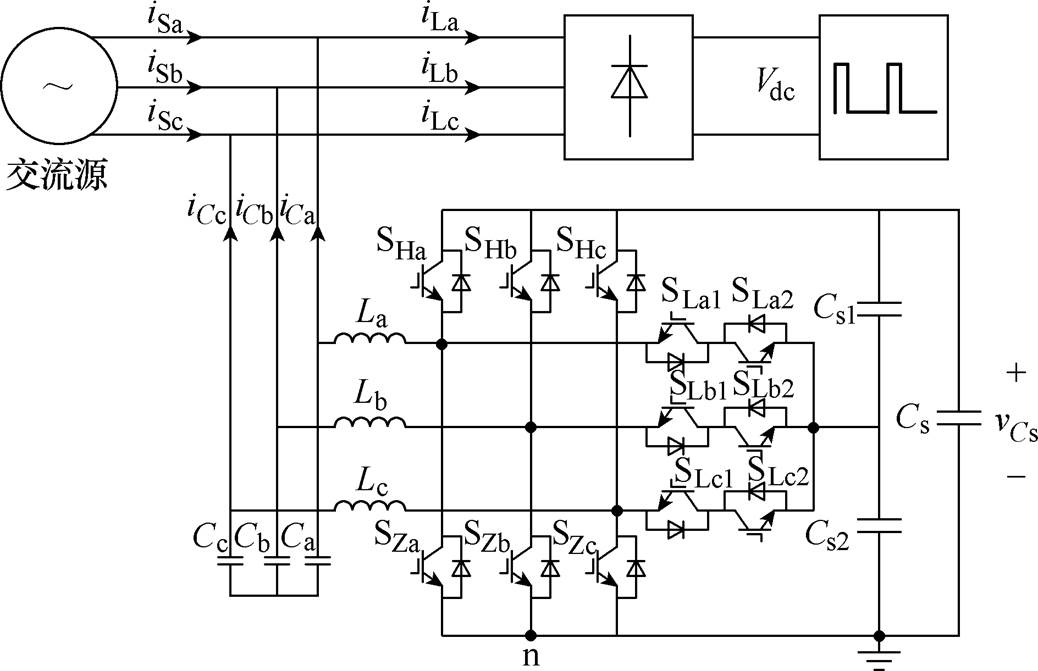
图2 带电流补偿器的脉冲负载交直流电源系统
Fig.2 AC-DC power system with pulsed load with a current compensator
交流源经无源整流后向脉冲负载供电,为了消除高峰均比低频脉动功率对交流源的负面影响,基于原有供电系统的基础上,在交流源输出侧并接由三相三电平双向AC-DC变换器和解耦电容Cs构成的电流补偿器。从图中可以看到,电流补偿器的电路结构和接入方式与传统的有源滤波器类似,但与有源滤波器仅对高频谐波电流进行补偿明显不同,本文所研究的电流补偿器将同时对高频谐波电流和负载低频脉动电流进行补偿,因此从工作过程、电压电流控制方法和设计实现考虑,均与传统的有源滤波器有明显差异。
图3给出了电流补偿器的主要工作波形,图中,po为负载瞬时功率,Pp、Pv、Pav分别为脉冲负载峰值、谷值、平均功率,iLx为负载交流侧电流,iSx为交流源电流,iCx为电流补偿器输出电流,vCs为解耦电容电压,DvCs为解耦电容电压变化量,T1、T2分别为脉冲峰值和谷值持续时间。脉冲峰值时间段内,负载瞬时功率远大于平均功率Pav,电流补偿器工作在逆变模式,释放解耦电容中储存的能量补偿负载电流和交流源输出电流的差值,解耦电容电压vCs下降。脉冲谷值时间段内,负载瞬时功率低于平均功率,电流补偿器工作在整流模式,将交流源输出功率与负载功率的差值转移至解耦电容,电容电压vCs上升。同时,在整个负载周期内,电流补偿器都始终补偿无源整流电路导致的高频谐波电流,从而使得交流源只需输出平稳的正弦波电流。
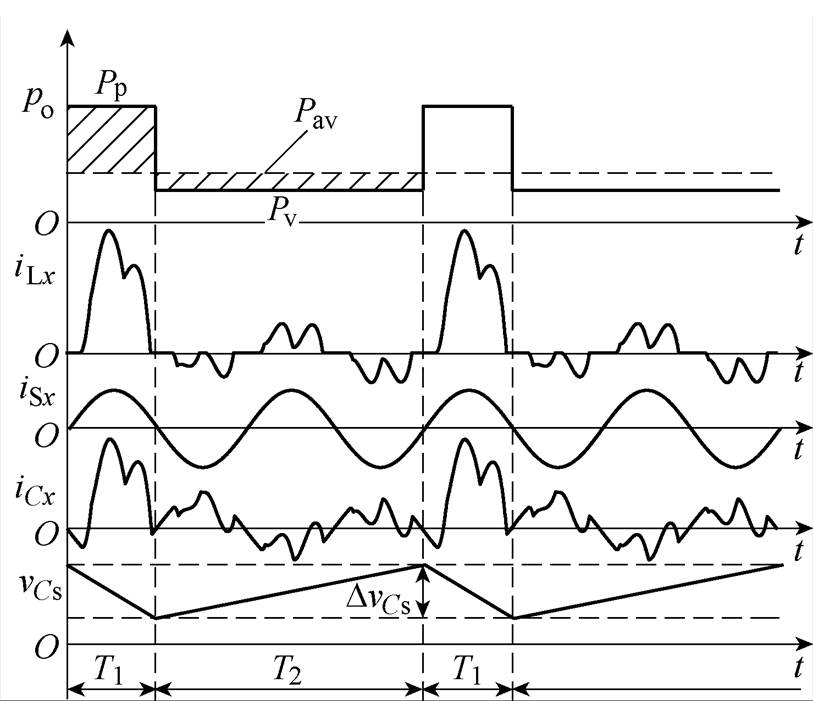
图3 主要工作波形
Fig.3 Key working waveforms
图4给出了脉冲电流补偿器的控制框图,图中,iLdH为负载交流侧电流的d轴分量的交流量,iLq为负载交流侧电流的q轴分量,vCs_ea为解耦电容电压控制器的输出,ua、ub和uc分别为电流补偿器的三相电压调制波,vCs1和vCs2分别为分压电容Cs1和Cs2上的电压,SHx和SZx为电流补偿器的开关管。
控制系统由解耦电容电压控制、补偿电流基准产生、补偿电流跟踪控制和PWM等部分构成。电流补偿器采用电压电流双环控制,其中,电压外环用于调节解耦电容电压,电流内环则直接调节电流补偿器的输出电流,使得补偿器输出功率等于负载功率的交流分量。
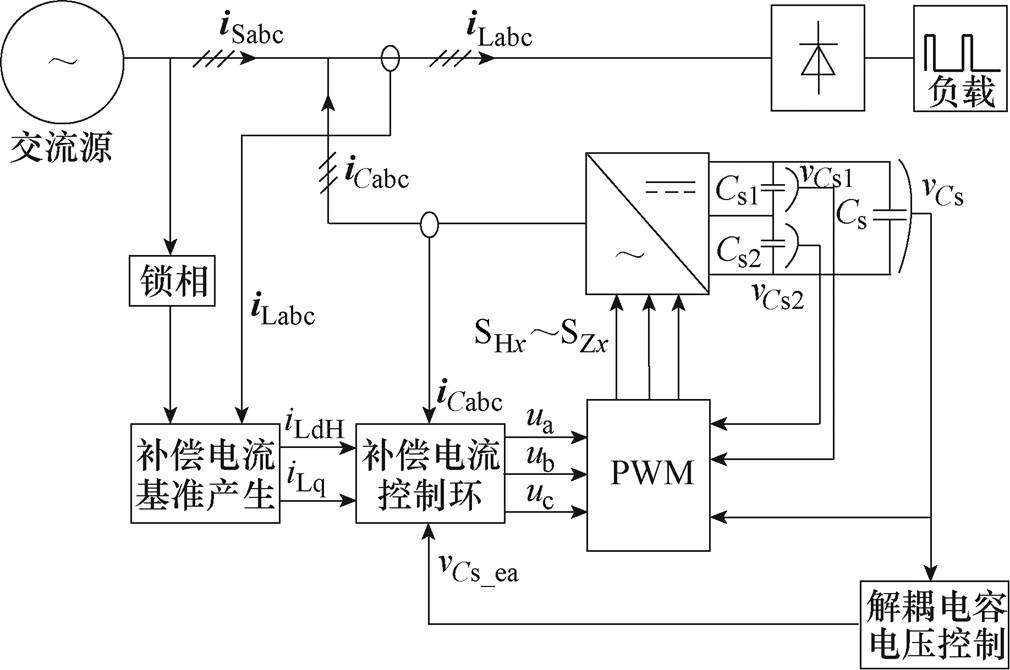
图4 脉冲电流补偿器控制框图
Fig.4 Control block diagram of the pulsed current
1)解耦电容电压控制
脉冲负载峰值功率期间,负载峰值功率和平均功率之差由解耦电容提供。电容储存的能量正比于其两端电压的二次方,为了充分利用电容的储能能力,在负载功率谷值期间使电容储存足够的能量,解耦电容电压采用峰值控制,即控制解耦电容电压的峰值在负载峰值功率开始时刻恒定,电容电压控制器的输出叠加于补偿电流基准。为了避免电流补偿器储能电压环造成补偿电流基准畸变,电容电压环的控制带宽应远低于脉冲负载电流重复频率。过慢的电容电压控制环,在负载功率大幅变化时可能引起电容电压出现较大的电压过冲和跌落,甚至导致系统失效。针对该问题,将进行详细分析并给出解决方案。图5给出了解耦电容电压控制框图。图中, 为解耦电容电压峰值基准,vCs_ea为解耦电容电压控制器的输出。
为解耦电容电压峰值基准,vCs_ea为解耦电容电压控制器的输出。
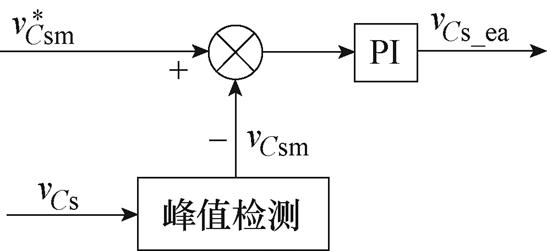
图5 解耦电容电压控制框图
Fig.5 Control block diagram of vCs
2)补偿电流基准产生
电流补偿器的最终目标是使交流源侧输出功率保持恒定,脉冲负载所引起的低频交流功率以及高频谐波电流、无功电流等都由电流补偿器提供。补偿电流基准产生环节的作用,即为获取补偿电流的参考值。
假设交流源侧电压稳定,在dq坐标系下,脉冲负载在交流侧引起的功率波动表现为三相电流的d轴分量波动。因此,整流器三相输入电流iLx的d轴分量的交流量,同时包含了电流补偿器需要提供的低频脉动电流和高频谐波电流。而整流器三相输入电流iLx的q轴分量,则代表了负载在交流源侧引起的无功电流分量,该无功电流也可以由电流补偿器提供。基于上述分析,图6给出了补偿电流基准产生环节的构成框图。图6中,在dq轴坐标系下,三相电流d轴分量iLd经低通滤波器后获得其直流分量ILd,将d轴分量瞬时值iLd与低通滤波器的输出直流量ILd做差,即得到三相输入电流d轴分量的交流量iLdH。而三相电流的q轴分量iLq则直接作为补偿器输出电流对应q轴的基准值。
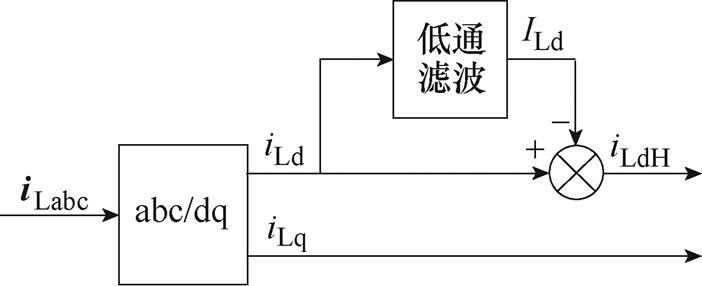
图6 补偿电流基准产生框图
Fig.6 Compensation current reference generation block diagram
需要特别说明的是,为了获取补偿电流在d轴下的直流分量,图6中低通滤波器的截止频率要远低于负载脉动功率的最低重复频率。在负载功率突变时,d轴电流基准中将存在直流分量,使得解耦电容电压出现大幅度下降或上升,影响系统的稳定运行。针对该问题,第3节将进行详细分析并给出解决方案。
3)补偿电流控制环
补偿电流控制框图如图7所示。三相输入电流d轴分量的交流量iLdH叠加解耦电容电压环vCs_ea的输出,作为最终补偿器输出电流在d轴的基准值。d轴的基准值与q轴的基准值iLq分别与电流补偿器输出电流iCx的d轴分量iCd及q轴分量iCq进行比较和控制。为了使补偿电流控制环能够快速响应负载脉动功率,同时对三相电流中的5次、7次等高频谐波有较好的补偿效果,本文采用了比例-积分-谐振(Proportional Integral Resonant, PIR)控制器,控制器的输出ud和uq经坐标变换后,得到电流补偿器三相电压调制波ua、ub和uc。

图7 补偿电流控制框图
Fig.7 Control block diagram of compensation current
4)PWM
本文采用载波PWM策略,如图8所示,其工作原理与传统三相三电平变换器相同。然而,由于解耦电容电压随负载功率脉动而大幅度低频波动,变化的直流侧电压将引起环路增益的波动。根据已有分析,对三相三电平变换器的任一相,PWM环节和高频开关桥臂的增益可以表示为
 (1)
(1)
式中, 为三相三电平变换器三角载波的幅值。为了消除直流侧电容电压大幅快速波动造成的影响,本文在PWM环节引入电容电压前馈系数k2,使得加入前馈后的增益为恒定值k,即
为三相三电平变换器三角载波的幅值。为了消除直流侧电容电压大幅快速波动造成的影响,本文在PWM环节引入电容电压前馈系数k2,使得加入前馈后的增益为恒定值k,即
 (2)
(2)
 (3)
(3)
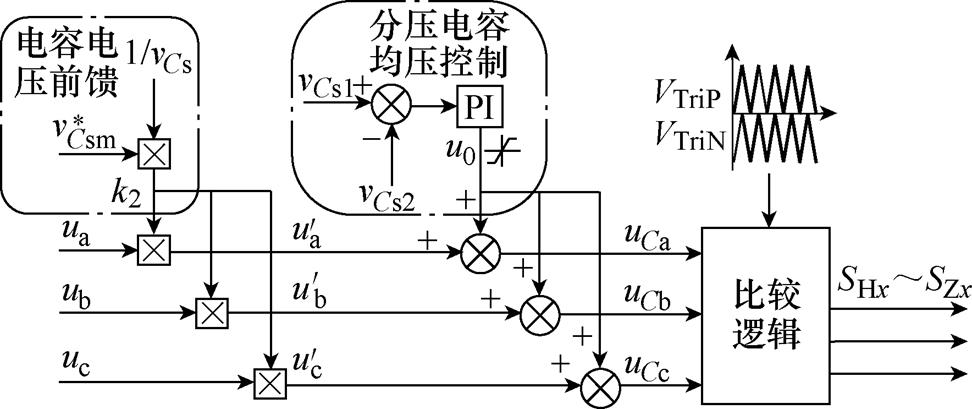
图8 PWM策略
Fig.8 PWM scheme
 、
、 和
和 为引入电容电压前馈系数的电流补偿器三相电压调制波。同时,为了避免三相三电平变换器直流分压电容电压不均衡,引入了电容电压均衡调节。由此,得到PWM环节的完整框图如图8所示。
为引入电容电压前馈系数的电流补偿器三相电压调制波。同时,为了避免三相三电平变换器直流分压电容电压不均衡,引入了电容电压均衡调节。由此,得到PWM环节的完整框图如图8所示。
根据第2节可知,交流侧电流d轴分量经低通滤波器后,与其瞬时值作差即可得到补偿电流基准为
 (4)
(4)
式中,GLPF(s)为低通滤波器的传递函数,相应的转折频率为fLPF,其表达式为
 (5)
(5)
环节1-GLPF(s)引起的相位滞后可以表示为
 (6)
(6)
因此,最终得到的补偿电流基准d轴分量与实际的补偿电流基准d轴分量的相对误差为
 (7)
(7)
由式(7)可知,若要使得补偿电流基准的相对误差限制在1%以内,则低通滤波器的转折频率应不高于1%脉冲重复频率。这将导致低通滤波器的动态响应很慢。
图9给出了脉冲功率突增时的工作波形。在Tn+1周期,由于脉冲重复频率或脉冲峰谷值持续时间变化,导致脉冲负载平均功率由Po_av(n)变为Po_av(n+1)。理想的补偿器功率为负载功率po的交流分量pC_idea,但由于低通滤波器和电压环不能及时响应,使得实际补偿基准pC中存在正向直流分量PC_av,因此在脉冲重复周期内电流补偿器释放能量大于吸收能量,储能电容电压下降。若电容电压最小值vCsmin下降至交流侧电压峰值以下时,电流补偿器不能正常工作,将失去补偿效果;反之,当脉冲功率突然减少时,低通滤波器及电压环的慢速响应能力将导致储能电容电压快速上升,可能造成系统过电压失效。虽然通过大幅增加储能电容的容值,可以在一定程度上缓解低通滤波器响应速度慢导致的电容电压快速上升或跌落,但会导致解耦电容体积、质量过大。为了解决负载功率大幅变化时可能引起的电容电压大幅过冲和跌落,本文提出了以下两个改善方法。

图9 脉冲功率突增时的工作波形
Fig.9 Dynamic waveforms when load power step-up
1)基准前馈控制
本文首先采用了脉冲电流基准前馈控制的方法。脉冲功率突增时的工作波形如图9所示,脉冲负载变化前后的平均功率分别为Po_av(n)和Po_av(n+1)分别为
 (8)
(8)
 (9)
(9)
式中,Tn、Tn+1和Tn+2分别为第n、n+1和n+2个周期的时间;Tpn和Tvn分别为第n个周期负载处于峰值和谷值的时间;Tp(n+1)和Tv(n+1)分别为第n+1个周期负载处于峰值和谷值的时间。
为了解决系统响应不及时导致的补偿基准中存在正向直流分量PC_av的问题,可以在原补偿电流基准iLdH中,通过前馈方式减去脉冲功率突变引起的直流分量。脉冲功率变化前后的负载平均功率差值
 为
为
 (10)
(10)
负载平均功率差值对应的基准电流直流分量差值 为
为
 (11)
(11)
引入脉冲电流基准前馈的补偿电流基准产生框图如图10所示。图中,Vo和io分别为脉冲负载电压和电流。在Tn+2周期的初始时刻,引入前两个周期负载平均功率差值对应的基准电流直流分量差值,得到新的电流基准iLdH为
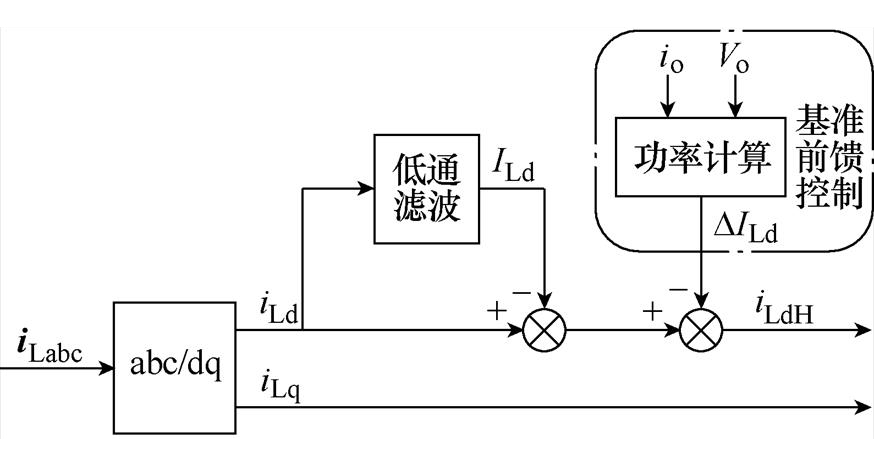
图10 带基准前馈的补偿电流基准产生框图
Fig.10 Compensation current reference generation block diagram with reference feedforward
 (12)
(12)
引入基准前馈后,突增负载导致的解耦电容电压最小值vCsmin下将比引入前馈前有明显改善。
2)电压限幅控制
为了进一步保护系统在负载功率大幅变化时可能出现的电容电压过冲、跌落、甚至系统失效问题,本文引入了解耦电容电压快速环,包括电容电压上限控制器和电容电压下限控制器。上、下限控制器可以采用滞环控制或比例控制等,以实现电容电压达到上、下限值时的快速调节。加入快速电压环后的解耦电容电压控制器的实现框图如图11所示,其中电压上、下限控制器采用了比例控制。图中,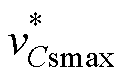 和
和 分别为电容电压上限控制器和下限控制器的上限值和下限值。
分别为电容电压上限控制器和下限控制器的上限值和下限值。
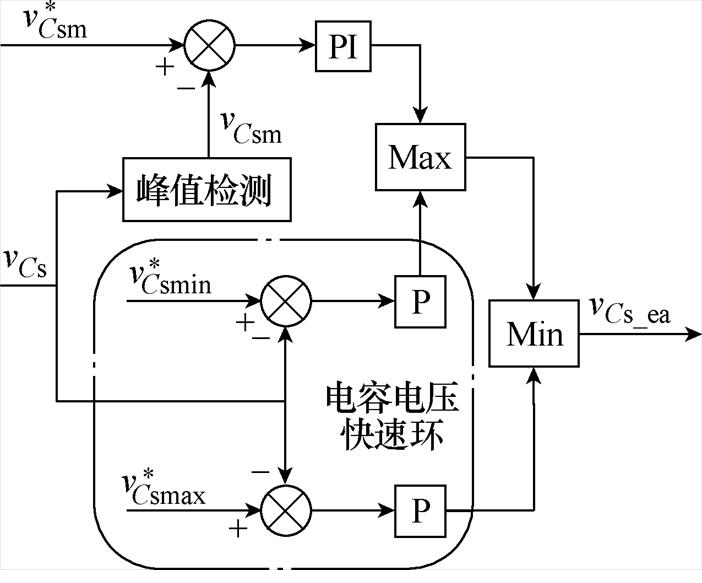
图11 带快速环的解耦电容电压控制框图
Fig.11 Control block diagram of vCs with fast voltage loop
为了验证本文所提出的电流补偿器及其控制方法的有效性,研制了实验样机并进行了实验验证。系统输入输出关键参数见表1。样机采用的数字控制芯片为TI公司的TMS320F28335,电流补偿器中IGBT选用型号为IKW30N65H5,滤波电感Lx= 1.6mH(x=a, b, c),滤波电容Cx=4μF,开关频率fC= 20kHz,解耦电容Cs=0.47mF,解耦电容电压范围vCs为285~400V。
表1 交流输入源及负载相关参数
Tab.1 The relationship between voltages and currents in different intervals
参 数数 值 交流源电压有效值Vsrms/VAC 110 交流源频率fs/Hz50 脉冲峰值电流Ip/A8 谷值电流Iv/A2 负载侧电压Vo/V250 脉冲负载频率fo/Hz12.5~25 解耦电容电压vCs/V285~400 解耦电容Cs/mF0.47
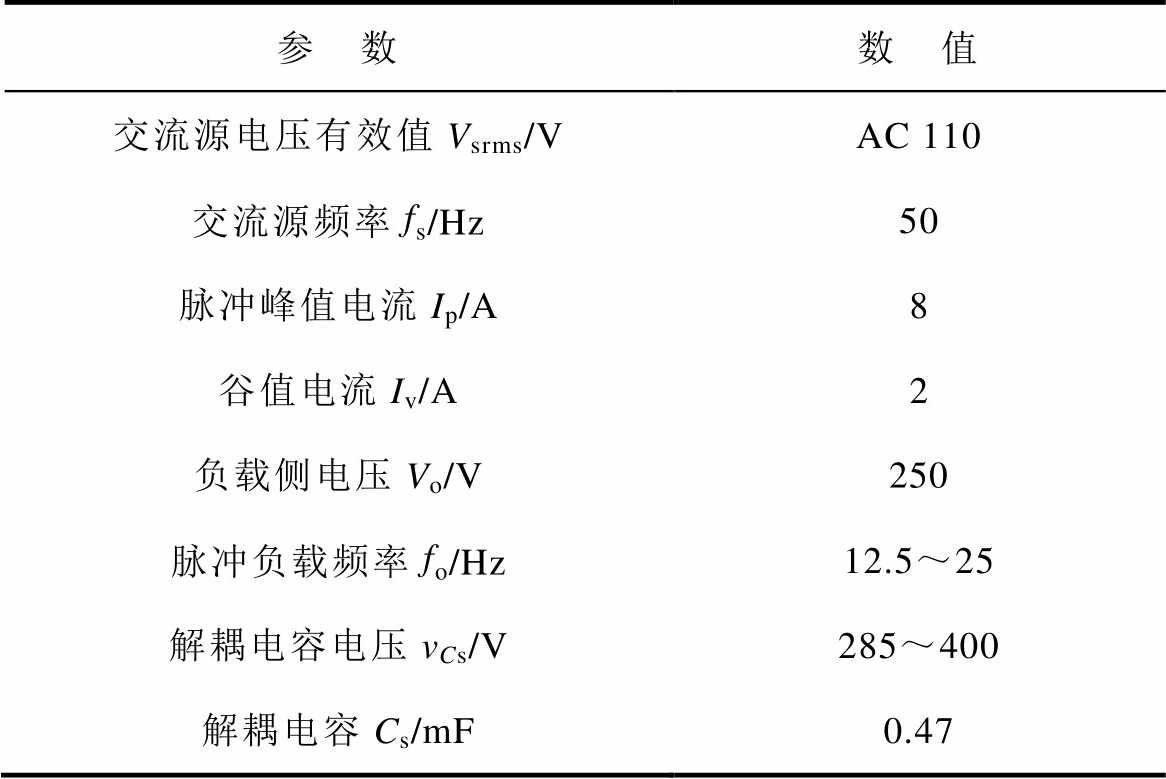
图12给出了不同脉冲负载频率下加入电流补偿器后的稳态波形。图中,ip为输出侧电流波形。从图中可以看出,解耦电容电压vCs随脉冲负载状态宽幅波动,在脉冲功率峰值期间,Cs与交流源一起向脉冲负载供电,vCs下降;在脉冲功率谷值期间,交流源向解耦电容Cs和脉冲负载供电,vCs上升;未经电流补偿器补偿的整流桥输入电流iLa包含脉冲尖峰电流和高频谐波,而经补偿后的交流源输入电流iSa为稳定的正弦波形,显著改善了交流输入源的电能质量。
图12 稳态波形
Fig.12 Steady state waveforms
图13给出了动态补偿性能改善前的电流补偿器动态波形。从图中可以看出,当脉冲负载频率提高引起负载平均功率突增时,解耦电容电压vCs大幅跌落,导致电流补偿器工作异常,交流源输入电流iSa得不到有效补偿,供电电能质量变差。
图14给出了动态补偿性能改善后的电流补偿器动态波形,图14a~图14d分别为脉冲功率谷值时间增加、脉冲功率谷值时间减少、脉冲功率峰值时间增加和脉冲功率峰值时间减少而引起负载平均功率突变时的实验波形。从图中可以看出,加入改善措施后,电流补偿器能够快速响应负载功率波动,避免了负载平均功率突变对解耦电容电压造成的影响。实验结果表明,本文所提出的补偿电流基准前馈控制方法的有效性。
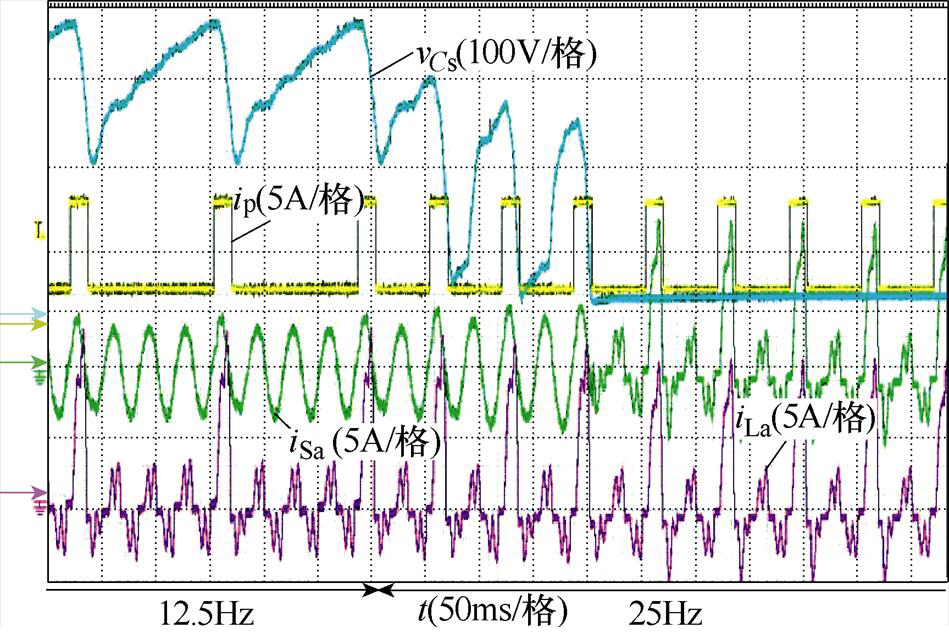
图13 动态性能提升前的动态波形
Fig.13 Dynamic waveforms without dynamic performance improvement

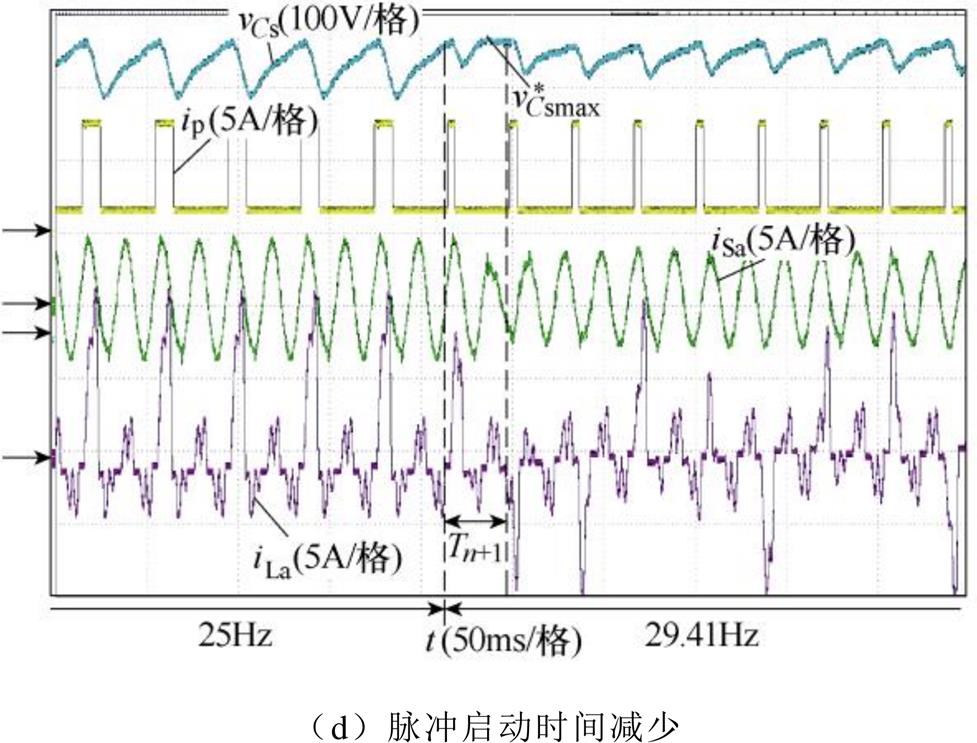
图14 动态性能提升后的动态波形
Fig.14 Dynamic waveforms with dynamic performance improvement
针对带低频脉冲负载的三相交直流电源系统,本文研究了一种兼具低频脉动电流和高频谐波电流补偿功能的电流补偿器。本文详细分析了电流补偿器的基本电路结构和工作原理,提出了相应的调制控制策略。在此基础上,为了改善系统在脉冲负载功率大幅变化时的动态性能,提出了基准前馈控制方法。实验结果表明,采用本文所提出的方案,实现了三相交直流电源系统中12.5~25Hz低频脉冲负载电流的有效补偿,采用所提出的基准前馈控制方法,使得控制器能够在单个脉冲负载周期内响应负载功率变化,避免了脉冲负载功率突变时的解耦电容电压大幅波动,消除了负载低频脉动功率对交流输入源的负面影响。
参考文献
[1] 宋清超, 陈家伟, 蔡坤城, 等. 多电飞机用燃料电池-蓄电池-超级电容混合供电系统的高可靠动态功率分配技术[J]. 电工技术学报, 2022, 37(2): 445- 458.
Song Qingchao, Chen Jiawei, Cai Kuncheng, et al. A highly reliable power allocation technology for the fuel cell-battery-supercapacitor hybrid power supply system of a more electric aircraft[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 445- 458.
[2] Sarlioglu B, Morris C T. More electric aircraft: review, challenges, and opportunities for commercial transport aircraft[J]. IEEE Transactions on Trans- portation Electrification, 2015, 1(1): 54-64.
[3] Stailey J E, Hondl K D. Multifunction phased array radar for aircraft and weather surveillance[J]. Pro- ceedings of the IEEE, 2016, 104(3): 649-659.
[4] 孙勇, 林松, 卢胜利, 等. 长脉宽模式下雷达供电系统功率波动机理研究[J]. 电源学报, 2021, 19(3): 134-141.
Sun Yong, Lin Song, Lu Shengli, et al. Study on power fluctuation mechanism of radar power system in long pulse width mode[J]. Journal of Power Supply, 2021, 19(3): 134-141.
[5] 严鋆, 王金全, 陈颖, 等. 基于开关函数的脉冲功率负载大信号模型研究[J]. 电工技术学报, 2020, 35(16): 3509-3517.
Yan Jun, Wang Jinquan, Chen Ying, et al. Study on large-signal model for pulsed power load based on switching functions[J]. Transactions of China Elec- trotechnical Society, 2020, 35(16): 3509-3517.
[6] Park Y J, Lyu S C, You T S. Development of high density high voltage power supply for phased array transmitters[C]//IEEE Pulsed Power Conference, Monterey, USA, 2005: 182-185.
[7] 李春, 马凡, 付立军, 等. 十二脉波不控整流器直流单极接地短路的动态数学模型[J]. 电工技术学报, 2020, 35(7): 1529-1537.
Li Chun, Ma Fan, Fu Lijun, et al. Dynamic mathematical model of twelve-pulse diode rectifier with pole-to-ground DC fault[J]. Transactions of China Electrotechnical Society, 2020, 35(7): 1529- 1537.
[8] Smolleck H A, Ranade S J, Prasad N R, et al. Effects of pulsed-power loads upon an electric power grid[J]. IEEE Transactions on Power Delivery, 1991, 6(4): 1629-1640.
[9] 甄洪斌, 张晓锋, 沈兵, 等. 脉冲负荷对舰船综合电力系统的冲击作用研究[J]. 中国电机工程学报, 2006, 26(12): 85-88.
Zhen Hongbin, Zhang Xiaofeng, Shen Bing, et al. Research on impact of pulsed power loads on naval integrated power system[J]. Proceedings of the CSEE, 2006, 26(12): 85-88.
[10] 史晓阳, 王立华. 航空发电机弹性轴脉冲负载下疲劳强度分析方法[J]. 船电技术, 2019, 39(8): 55-58.
Shi Xiaoyang, Wang Lihua. Analysis method about fatigue strength of aviation generator elastic shaft with pulse torque[J]. Marine Electric & Electronic Engineering, 2019, 39(8): 55-58.
[11] 何东欣, 张涛, 陈晓光, 等. 脉冲电压下电力电子装备绝缘电荷特性研究综述[J]. 电工技术学报, 2021, 36(22): 4795-4808.
He Dongxin, Zhang Tao, Chen Xiaoguang, et al. Research overview on charge characteristics of power electronic equipment insulation under the pulse voltage[J]. Transactions of China Electrotechnical Society, 2021, 36(22): 4795-4808.
[12] Sun Yao, Liu Yonglu, Su Mei, et al. Review of active power decoupling topologies in single-phase systems[J]. IEEE Transactions on Power Electronics, 2016, 31(7): 4778-4794.
[13] Vitorino M A, Alves L F S, Wang Ruxi, et al. Low frequency power decoupling in single-phase appli- cations: a comprehensive overview[J]. IEEE Transa- ctions on Power Electronics, 2017, 32(4): 2892-2912.
[14] 汪飞, 钟元旭, 李林, 等. 基于集成三端口变换器的无电解电容LED驱动[J]. 电工技术学报, 2016, 31(23): 189-198.
Wang Fei, Zhong Yuanxu, Li Lin, et al. An elec- trolytic capacitor-less LED driver based on an integrated three-port converter[J]. Transactions of China Electrotechnical Society, 2016, 31(23): 189-198.
[15] Chen Runruo, Liu Yunting, Peng Fangzheng. DC capacitor-less inverter for single-phase power con- version with minimum voltage and current stress[J]. IEEE Transactions on Power Electronics, 2015, 30(10): 5499-5507.
[16] 李红波, 张凯, 赵晖, 等. 基于功率解耦的高功率密度单相整流器[J]. 电工技术学报, 2011, 26(增刊1): 77-82.
Li Hongbo, Zhang Kai, Zhao Hui, et al. A high power density single rectifier with power decoupling function[J]. Transactions of China Electrotechnical Society, 2011, 26(S1): 77-82.
[17] Huang Xinze, Ruan Xinbo, Du Fangjun, et al. A pulsed power supply adopting active capacitor converter for low-voltage and low-frequency pulsed loads[J]. IEEE Transactions on Power Electronics, 2018, 33(11): 9219-9230.
[18] 徐群伟, 吴俊, 吕文韬, 等. 基于双分数阶快速重复控制的有源电力滤波器电流控制策略[J]. 电工技术学报, 2019, 34(增刊1): 300-311.
Xu Qunwei, Wu Jun, Lü Wentao, et al. Current control strategy of active power filter based on double fractional-order rapid repetitive control[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(S1): 300-311.
[19] 孟令辉, 舒泽亮, 闫晗, 等. 基于特征次谐波补偿的单相统一电能质量调节器并联变换器控制策略[J]. 电工技术学报, 2020, 35(24): 5125-5133.
Meng Linghui, Shu Zeliang, Yan Han, et al. Control strategy for single-phase unified power quality conditioner of parallel converter based on specific order harmonics compensation[J]. Transactions of China Electrotechnical Society, 2020, 35(24): 5125- 5133.
A Pulsed Current Compensator and Control Strategy for High Peak-to-Average-Ratio Low Frequency Pulsed Load
Abstract The pulsed power load with high peak-to-average ratio and low-frequency brings challenges to the safe and stable operation of airborne AC-DC power systems. A pulse current compensator for high peak-to-average ratio and low frequency pulse power loads is proposed in this paper. A bi-directional AC-DC converter and a small capacity energy storage capacitor are used to decouple the high peak-to-average ratio pulse load current from the output current of the AC source, and the compensation of low frequency pulsating current and high frequency harmonic current is realized, so that the AC source only needs to provide stable average load power. In order to improve the compensation accuracy of the pulse current compensator and reduce the overshoot and dip of the decoupling capacitor voltage during the sudden change of the pulse load power, a control method combining the decoupling capacitor voltage and the pulse current reference feedforward is proposed. The operation principle and characteristics of the pulse current compensator are analyzed in detail, and the effectiveness of the proposed compensator and its control method is verified through experiments.
keywords:Pulsed power supply, pulse current compensator, bi-directional AC-DC converter, feedforward control
DOI: 10.19595/j.cnki.1000-6753.tces.211352
中图分类号:TM46
南京邮电大学引进人才科研启动基金(NY220144, NY220148)、国家自然科学基金(51977105, U2141227)和江苏省青蓝工程资助项目。
收稿日期 2021-08-27
改稿日期 2021-11-08
杨 帆 女,1985年生,博士,讲师,研究方向为电力电子与电力传动。E-mail: yangfan@njupt.edu.cn
朱建鑫 男,1991年生,博士,讲师,研究方向为电力电子与电力传动。E-mail: zhujianxin@njupt.edu.cn(通信作者)
(编辑 陈 诚)