 大于信号中最高频率
大于信号中最高频率 的2倍时,采样后的信号中完整保留了原始信号中的信息。为了明确舰船磁场的谱特征,得到磁性分布曲线与能量谱分布的关系,基于采样定理,在实验室典型模型试验数据基础上,对不同深度下磁场信号三分量进行能量谱分析,提取频域特征量,得出舰船目标的磁性特征分布与频谱能量之间的关系。
的2倍时,采样后的信号中完整保留了原始信号中的信息。为了明确舰船磁场的谱特征,得到磁性分布曲线与能量谱分布的关系,基于采样定理,在实验室典型模型试验数据基础上,对不同深度下磁场信号三分量进行能量谱分析,提取频域特征量,得出舰船目标的磁性特征分布与频谱能量之间的关系。摘要 为了实现对舰船磁场信号的准确重构及换算,在缩比模型试验数据分析的基础上,对磁性处理后的船模磁场时频特性进行分析,建立起截止频率与最大能谱的关系,得到采样间隔与船长间的数学模型,提出适用于磁场的最大采样间隔计算方法,结合磁体模拟法进行磁场深度换算完成对该文方法的验证。结果表明,该方法对目标形状鲁棒性好,水面舰艇和水下潜艇目标皆适用,在较大采样间隔条件下能完成较高精度的信号重构,当由浅向深进行换算时,换算误差皆小于7%,当换算的基准深度不小于3倍船宽时,能完成由浅向深和由深向浅双向的磁场换算,换算误差均小于10%。
关键词:舰船磁场 能量谱 最大采样间隔 信号重构 深度换算
磁场的计算及建模方法在医学、电机、舰船等不同领域对不同对象有着不同方面的研究和应用[1-3],通过测量得到有限的舰船磁场数据反演其等效源磁场强度,或推算不同深度的磁场数据是研究舰船磁场特征分布规律的重要手段[4]。如何在采样间隔较大、采样点数有限的条件下实现对舰船目标磁场的反演,获得其完整的磁性特征,从而为未来获得舰船模型参数以及实现大深度水下探测提供理论基础是本文要解决的关键问题。
目前国外用于舰艇磁场建模的方法主要有积分方程法[5-6]、边界元法[7-9]和广义多极技术[10-11],利用磁体模拟法进行舰艇磁场建模的研究相对较少。国内在磁体模拟法方面研究较多:文献[12]建立了基于旋转椭球体和磁偶极子阵列的舰艇磁场模型;文献[13-15]采用优化算法从一定程度上减小了人为因素设置分布参数对模型的影响;文献[16]提出了一种磁单极子阵列反演建模方法。以上基于磁体模拟法的舰船磁场建模研究都是在采集到完整连续的磁场分布曲线的前提下进行的。在实际的磁场测量中,由于舰船磁隐身性能的提高,采集到的磁场信息较少,无法获得其准确完整的通过特性,剔除干扰数据后的散点又无法正确反映舰船真实的磁场分布曲线,影响反演精度。因此,需要研究一种新的磁场信号重构方法,克服对于磁场测量曲线的依赖性,使其能在磁场信号点之间间隔较大、磁场分布曲线不连续的条件下完成对舰船真实磁场曲线的信号重构。
本文在船模试验的基础上,基于采样定理提出一种舰船下方磁场的信号重构方法。该方法无需满足舰船磁场采样曲线完全准确和完整的要求,只需获取最大采样间隔,即能实现通过零散采样重构舰船真实的磁场分布曲线。实际工程应用中,采样点之间的间隔只要在计算所得的最大采样间隔内,即可有效剔除冗余和干扰数据,在保证模型精度的同时提高模型稳定性。
根据采样定理可知,当采样频率大于信号中最高频率的2倍时,采样后的信号中完整保留了原始信号中的信息。为了明确舰船磁场的谱特征,得到磁性分布曲线与能量谱分布的关系,基于采样定理,在实验室典型模型试验数据基础上,对不同深度下磁场信号三分量进行能量谱分析,提取频域特征量,得出舰船目标的磁性特征分布与频谱能量之间的关系。
以典型潜艇模型作为试验目标(长l=6m,宽b=0.6m),假设船模在传感器正上方以 匀速通过,采用动态连续采样,测量距离
匀速通过,采用动态连续采样,测量距离 ,设置采样频率
,设置采样频率 ,b为船模宽度,采样深度分别设置为1.5b、2.0b、3.0b和4.0b四个深度,取龙骨下磁场的三分量分别进行分析。试验布置如图1所示。
,b为船模宽度,采样深度分别设置为1.5b、2.0b、3.0b和4.0b四个深度,取龙骨下磁场的三分量分别进行分析。试验布置如图1所示。
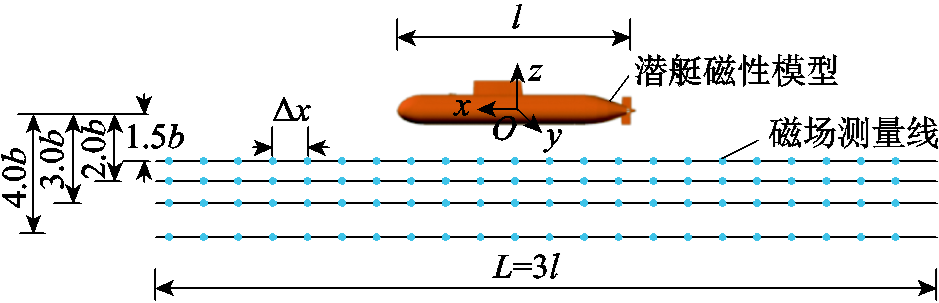
图1 船模实验布置图
Fig.1 Ship model experiment layout
图中,船长为 ,测量范围为
,测量范围为 ,
, 为正数,代表测量范围与船长之间的倍率因子,测量间隔为
为正数,代表测量范围与船长之间的倍率因子,测量间隔为 ,采样时间为
,采样时间为 ,采样点数为
,采样点数为 ,船模通过速度为
,船模通过速度为 ,采样频率为
,采样频率为 ,则有
,则有
 (1)
(1)
采取磁性处理技术后,船模在不同深度产生的磁场分布如图2所示,能量谱分布如图3所示。
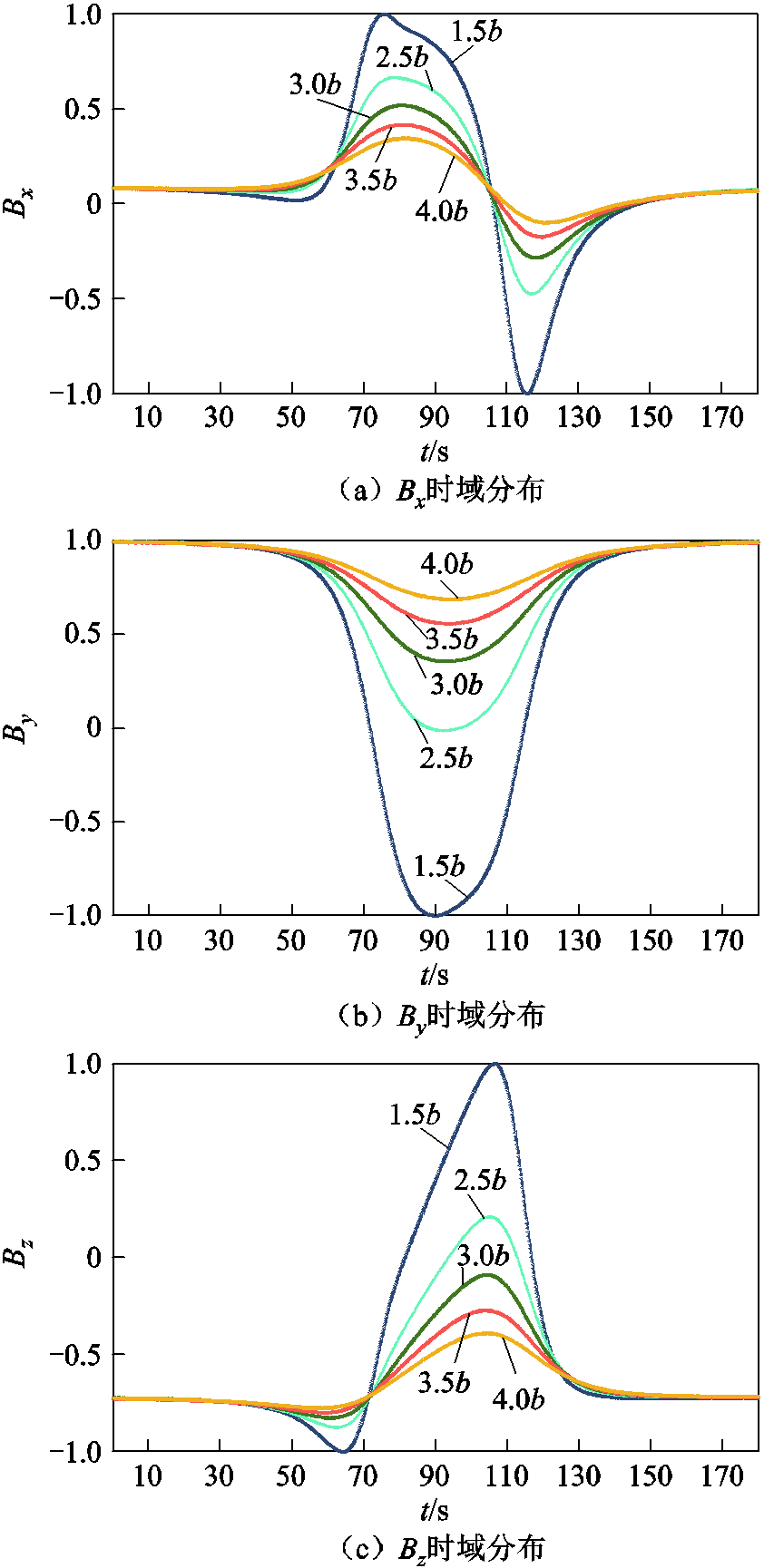
图2 磁性处理后,不同深度下的磁场分布
Fig.2 After magnetic treatment, magnetic field distribution at different depths
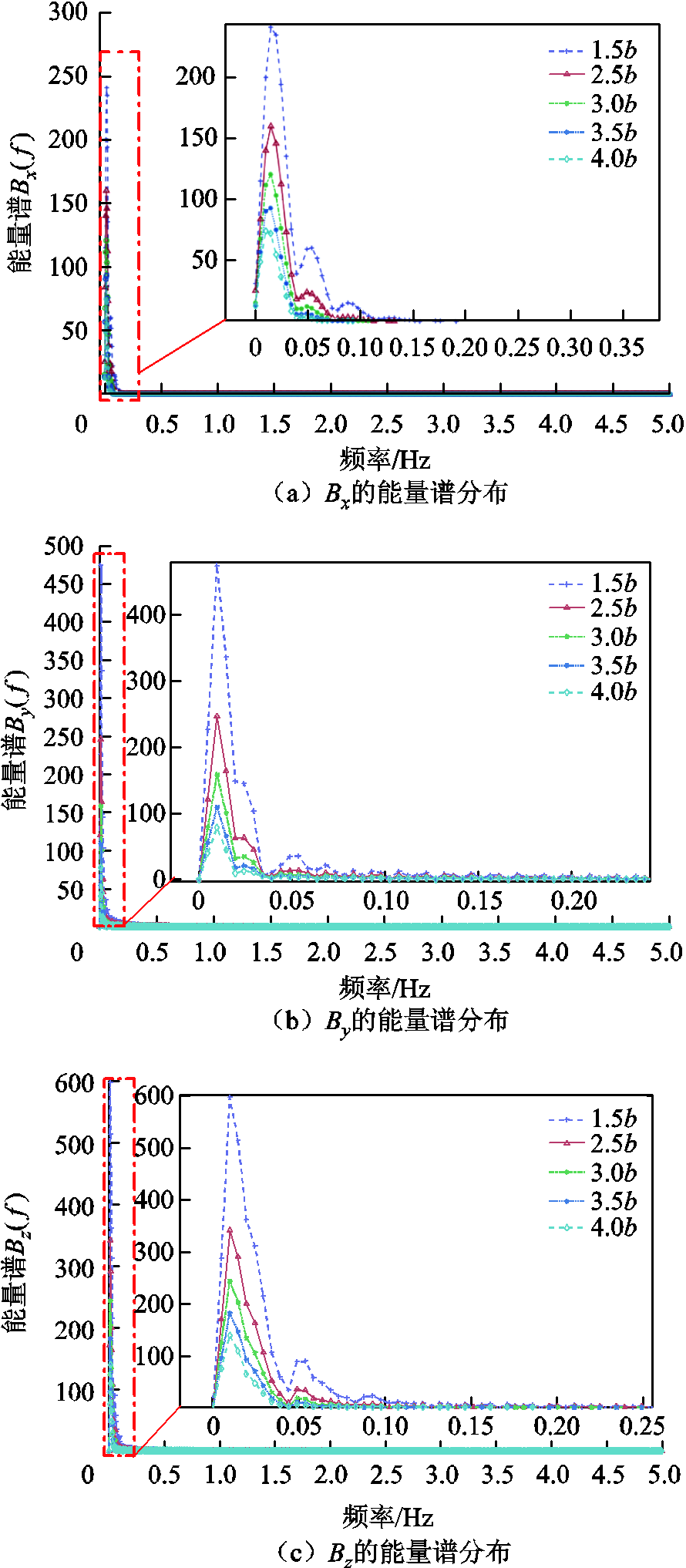
图3 磁性处理后,不同深度下的磁场能量谱分布
Fig.3 After magnetic treatment, the magnetic field energy spectrum distribution at different depths
为了便于观察曲线的变化,磁场分布数据采用归一化处理,能量谱采用局部放大处理。
由图3可知,磁场三分量最大能谱的分布呈现一定规律,根据最大能谱的变化规律有助于为后续获得磁场能谱的截止频率门限值提供理论依据,因此不同深度下磁场三分量最大能谱对应频率见表1。同时为了更好地分析磁场能谱,绘制磁场三分量的累积能量随频率的变化曲线如图4所示。
由上述分析计算可知:
(1)当测量深度小于3.0b时,磁场三分量的最大能谱频率相同,当测量深度大于3.0b时,磁场纵向分量 和垂向分量
和垂向分量 的最大能谱频率逐渐向低频方向移动。
的最大能谱频率逐渐向低频方向移动。
表1 采样频率为10Hz时,不同深度下磁场三分量最大能量谱对应频率
Tab.1 When the sampling frequency is 10Hz, the frequencytable corresponding to the maximum energy spectrum of the three components of the magnetic field at different depths

深度/m 1.5b0.0140.0090.009 2.5b0.0140.0090.009 3.0b0.0140.0090.009 3.5b0.0140.0090.004 4.0b0.0090.0090.004

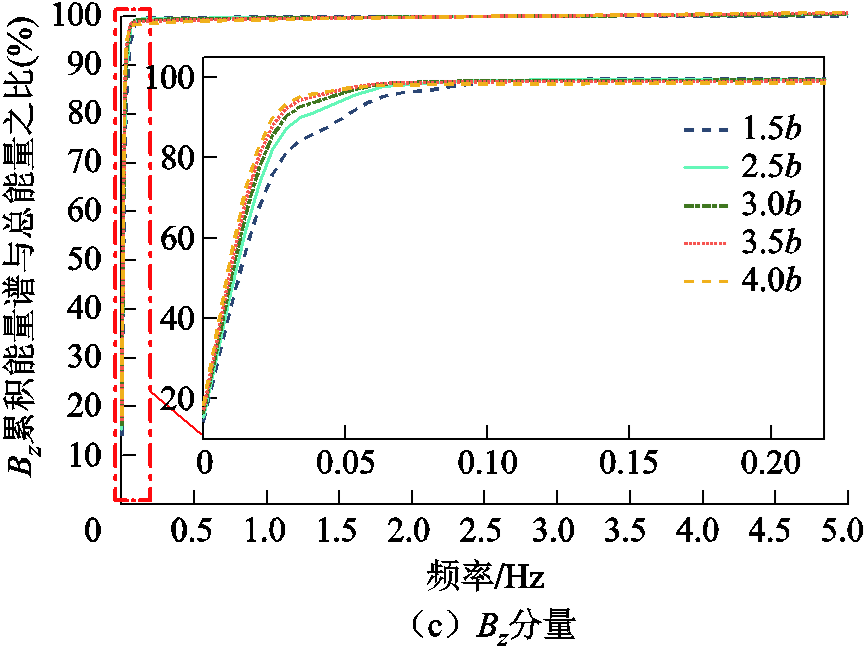
图4 磁场三分量的累积能量与总能量之比随频率变化曲线
Fig.4 The ratio of the accumulated energy to the total energy of the three magnetic field components varies with frequency
(2)当测量深度较小时,频谱存在多个谱峰值,这是由于局部磁化的原因。
(3)由图3可知,能量谱幅值呈快速衰减趋势,磁场信号主要频率成分集中在极低频区域。计算其累积能量(即能量谱估计曲线下的面积积分),得到累积能量与总能量之比随频率变化的曲线如图4所示。由图4可知,舰船匀速通过时,磁场95%的能量集中在0.05Hz以下,近98%的能量集中在0.1Hz以下。
因此,如何有效选取合适的截止频率,舍弃高频成分,使剩余能谱能重构完整原始信号的同时减少运算量和高频噪声的引入,是首要解决的问题。
为了有效选取合适的截止频率,一种合适的方法是建立起截止频率 与最大能谱
与最大能谱 的关系。由第1节可知,对应的信号带宽大小能同时从能量谱图和累积能量变化图中获得,相较而言,累积能量易受高频干扰的影响,因此,本节采用分析能量谱的方法建立与的关系,从而获得。
的关系。由第1节可知,对应的信号带宽大小能同时从能量谱图和累积能量变化图中获得,相较而言,累积能量易受高频干扰的影响,因此,本节采用分析能量谱的方法建立与的关系,从而获得。
具体步骤如下:
(1)去除磁场信号中的直流分量。假设通过时域采集得到的磁场三分量为 去除直流分量的磁场分布
去除直流分量的磁场分布 ,则
,则
 (2)
(2)
式中, 分别为表采集磁场的
分别为表采集磁场的 分量的平均值。
分量的平均值。
(2)对 进行快速傅里叶变换(Fast Fourier Transformation, FFT)计算得到能量谱
进行快速傅里叶变换(Fast Fourier Transformation, FFT)计算得到能量谱 ,并获得不同深度下的最大能谱
,并获得不同深度下的最大能谱 。
。
(3)建立截止频率与最大能谱的关系,确定截止频率。信号频带宽度的大小与允许误差的大小有关,工程上通常把频谱幅值下降到最大幅值的十分之一时所对应的频率作为信号的频宽。为了建立起截止频率与最大能谱 的关系,本文定义
的关系,本文定义 为截止频率门限值,根据能谱幅值
为截止频率门限值,根据能谱幅值 与最大能谱
与最大能谱 的比值确定截止频率,即:当
的比值确定截止频率,即:当 时,对应频率即为截止频率。分别将取为0.1、0.01、0.001、0.000 1,对比不同门限值对信号重构的影响。
时,对应频率即为截止频率。分别将取为0.1、0.01、0.001、0.000 1,对比不同门限值对信号重构的影响。
(4)建立截止频率与采样间隔的关系。设初始采样频率为 ,初始采样点数为
,初始采样点数为 ,截止频率为,对应采样点数为
,截止频率为,对应采样点数为 ,在相同的船模通过速度和采样范围下,存在以下比例关系
,在相同的船模通过速度和采样范围下,存在以下比例关系
 (3)
(3)
由式(1)可得最大采样间隔与最少采样点数之间存在关系
 (4)
(4)
(5)建立采样间距与船长之间的关系,定义 为采样间距系数,则最大采样间隔与船长之间的关系为
为采样间距系数,则最大采样间隔与船长之间的关系为
 (5)
(5)
根据定义的带宽选择及采样距离计算方法,对船模消磁后三分量的能量谱进行分析,得出带宽,从而得出最小采样频率、采样距离与船长之间的关系。结果见表2。
表2 门限值Q取不同值时,最小采样频率、采样距离与船长之间的关系
Tab.2 The relationship between the cutoff frequency frequency, sampling distance and the length of the ship when the threshold value Q is different
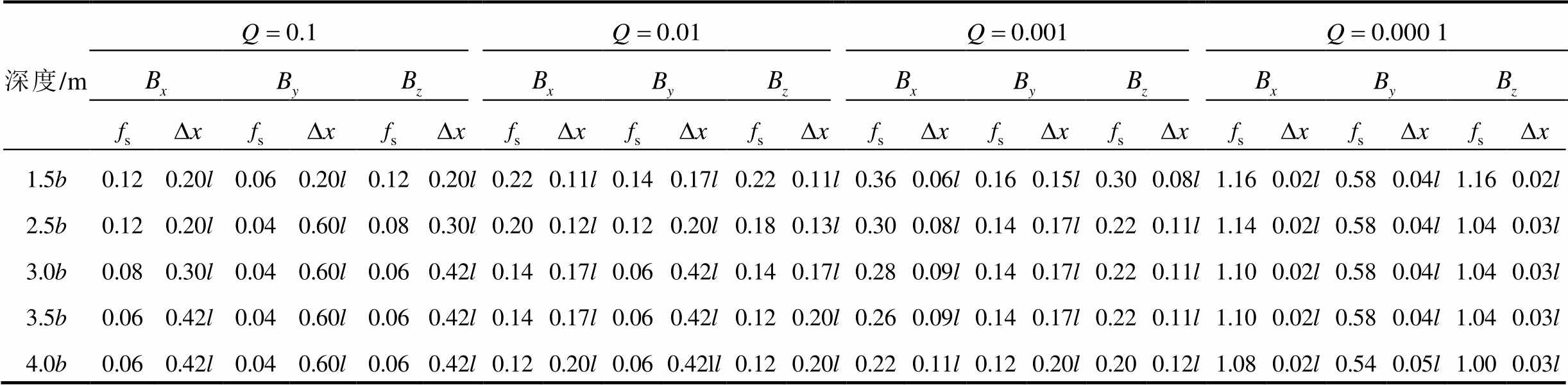
深度/m 1.5b0.120.20l0.060.20l0.120.20l0.220.11l0.140.17l0.220.11l0.360.06l0.160.15l0.300.08l1.160.02l0.580.04l1.160.02l 2.5b0.120.20l0.040.60l0.080.30l0.200.12l0.120.20l0.180.13l0.300.08l0.140.17l0.220.11l1.140.02l0.580.04l1.040.03l 3.0b0.080.30l0.040.60l0.060.42l0.140.17l0.060.42l0.140.17l0.280.09l0.140.17l0.220.11l1.100.02l0.580.04l1.040.03l 3.5b0.060.42l0.040.60l0.060.42l0.140.17l0.060.42l0.120.20l0.260.09l0.140.17l0.220.11l1.100.02l0.580.04l1.040.03l 4.0b0.060.42l0.040.60l0.060.42l0.120.20l0.060.42ll0.120.20l0.220.11l0.120.20l0.200.12l1.080.02l0.540.05l1.000.03l
由表2可知:①采样深度越小,最大采样间隔越小,重构原始信号所需的采样点越多,这是由于近场磁场分布更复杂;②磁场时域分布越复杂,对应分量最大采样间隔越小。因此,在实际应用中,只需分析磁场三分量中时域分布最复杂的能量谱即可获得最佳最大采样间隔。
为了保证采样间距能同时满足磁场三分量的重构需求,取同一深度下,对比磁场三分量的最大采样间隔,取其最小值,作为适用于此深度磁场三分量信号重构的最大采样间隔,得出不同值对应的不同深度最佳采样间隔见表3。
表3 不同门限值Q对应的不同深度最大采样间隔表
Tab.3 Table of maximum sampling intervals of different depths corresponding to different threshold values Q

深度/mQ=0.1Q=0.01Q=0.001Q=0.000 1 1.5b0.20l0.11l0.06l 0.02l 2.5b0.20l0.12l0.08l0.02l 3.0b0.30l0.17l0.09l0.02l 3.5b0.42l0.17l0.09l0.02l 4.0b0.42l0.20l0.11l0.02l
第2节通过选取不同的门限比计算得出能实现完整信号重构的不同深度的磁场最大采样间隔。为了比较不同最大采样间隔对磁场换算精度的影响,本节将磁场采样间隔设置为不同门限比Q所获得的对应最大采样间隔,对舰船磁场信号进行重构,并通过深度换算得出换算精度最佳的磁场最大采样间隔。
舰船磁场深度换算即根据舰船下方较浅处的磁场分布推算较深的磁场分布,一种可行的方法是磁体模拟法。磁体模拟法是一种构建等效源模拟舰船磁场分布从而实现舰船磁场仿真计算的方法,磁偶极子模型、均匀磁化的旋转椭球体模型、均匀磁化的旋转椭球体和磁偶极子混合模型都属于磁体模拟法。磁偶极子模型的计算精度较高,但磁偶极子的空间分布和个数易受人为因素的干扰,难以保证模型稳定性;单椭球体模型的稳定性高,但精度不足;均匀磁化的旋转椭球体和磁偶极子混合模型,能同时兼顾计算精度和模型稳定性,更具优势[17]。因此本文将船模简化为均匀磁化的旋转椭球体和磁偶极子混合模型进行深度换算。
为了直观简便地建立混合模型的数学计算过程,将磁偶极子的分布布置简化为在椭球体中轴线上均匀分布。假设均匀磁化的旋转椭球体的几何尺寸与舰船相当,如图5所示,将 个(为奇数)磁偶极子以相同的距离
个(为奇数)磁偶极子以相同的距离 沿着椭球体的纵向进行排列,长半轴为
沿着椭球体的纵向进行排列,长半轴为 ,短半轴为
,短半轴为 ,椭球体的几何中心和舰船的几何中心重合,从左到右分别记为
,椭球体的几何中心和舰船的几何中心重合,从左到右分别记为 那么第
那么第 个(
个( )磁偶极子的坐标为
)磁偶极子的坐标为 。
。

图5 均匀磁化的椭球体与磁偶极子混合模型
Fig.5 A hybrid model of ellipsoid and magnetic dipole with uniform magnetizationt
设磁性目标在 处产生的磁场三分量为
处产生的磁场三分量为 ,则有
,则有
 (6)
(6)
式中, 为磁偶极子阵列磁场计算的系数,均为已知的空间分布函数,其作用为建立起磁偶极子与场点之间的距离与场点空间坐标的几何关系,表达式为
为磁偶极子阵列磁场计算的系数,均为已知的空间分布函数,其作用为建立起磁偶极子与场点之间的距离与场点空间坐标的几何关系,表达式为
 (7)
(7)
式中

当 时,
时, 分别为第i个磁偶极子沿
分别为第i个磁偶极子沿 轴、
轴、 轴、
轴、 轴方向的磁矩分量。
轴方向的磁矩分量。
综合均匀磁化的旋转椭球体和磁偶极子混合阵列中的各个磁偶极子所满足的方程,可以得到测量点处的磁场应该满足的方程为
 (8)
(8)
 (9)
(9)
 (10)
(10)
 (11)
(11)
采集舰船通过传感器时测得的磁场三分量 ,就可以反推出混合模型中每一个磁偶极子的磁矩和空间三维坐标,进而得到椭球体的磁性分布,从而计算舰船周围空间的磁场,实现深度换算。
,就可以反推出混合模型中每一个磁偶极子的磁矩和空间三维坐标,进而得到椭球体的磁性分布,从而计算舰船周围空间的磁场,实现深度换算。
由式(11)可知,要获得磁偶极子的三维空间坐标,便要求解系数矩阵F,本文在文献[9]的模型基础上,同样采用遗传算法对稀疏矩阵的条件数进行求解,矩阵条件数的优化问题表达式及其约束方程为
 (12)
(12)
算法中具体参数设定见表4。
表4 算法参数设定表
Tab.4 Algorithm parameter setting table

磁偶极子个数种群大小最大代数变异率交叉率 1010200.20.3
完成算法的参数设定后,确定舰船磁场等效源的具体反演及深度换算流程步骤如图5所示。
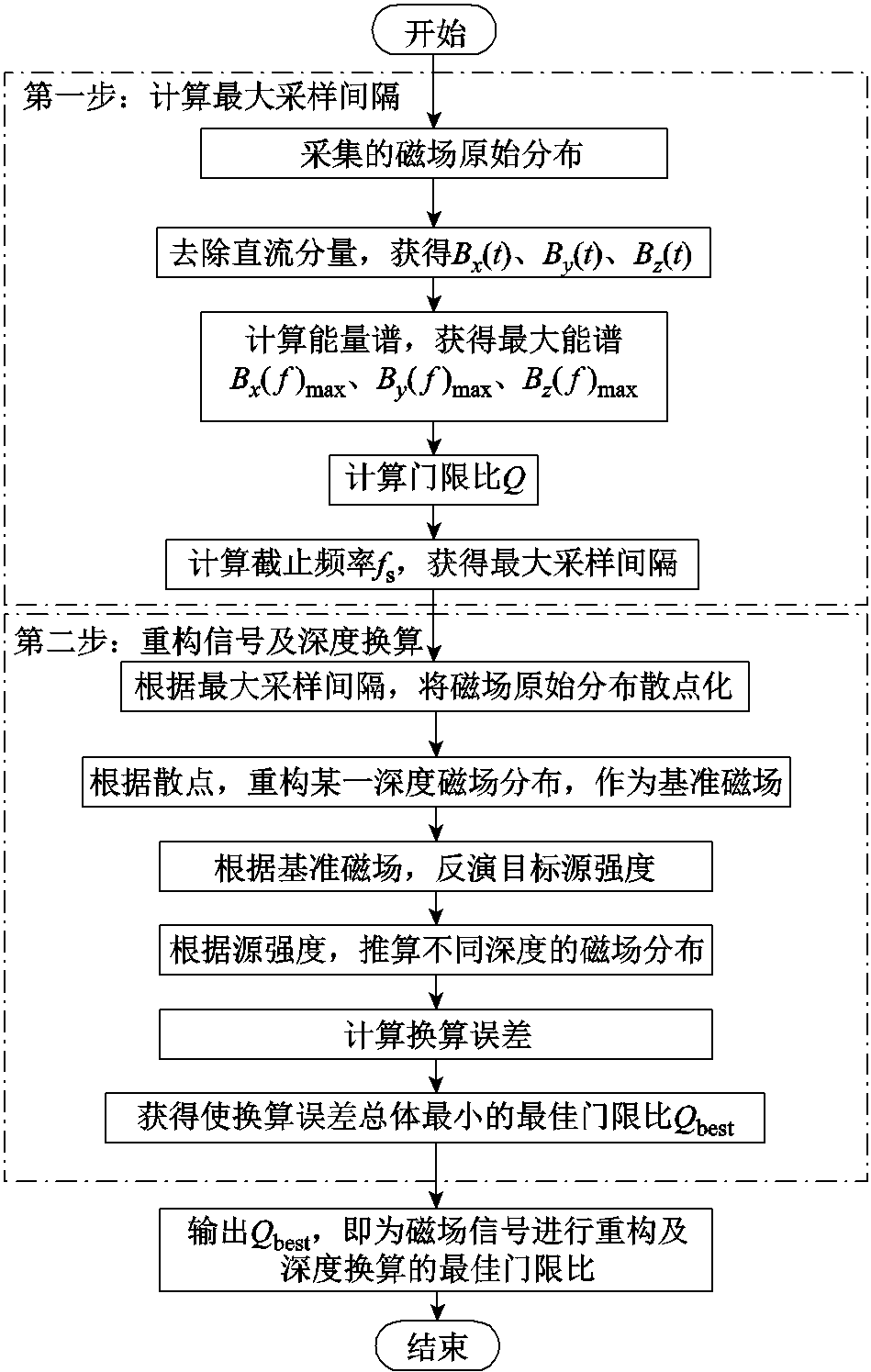
图6 舰船磁场等效源反演及深度换算流程
Fig.6 Flow chart of ship magnetic field equivalent source inversion and depth conversion
具体步骤为:
(1)根据第2节的算法推导,计算获得门限比Q。
(2)根据门限比Q获取磁场不同分量对应截止频率,计算磁场最大采样间隔,对信号进行平滑滤波。
(3)根据磁场最大采样间隔,在符合最大采样间隔范围内散点化原始采集的磁场数据,以模拟实际磁场测量中信号采集不完整的情况,并将散点进行线性连接,将其分布作为该深度的重构曲线,即得到不同深度磁场分布的基准值。
(4)根据浅深度的磁场信号的反演计算目标源的条件系数矩阵F和磁偶极子的磁矩M。
(5)根据系数矩阵F计算出磁偶极子的位置坐标,结合磁矩M得到模拟体的磁性分布。
(6)根据式(6)和 进行深度换算,得到不同深度的磁场分布
进行深度换算,得到不同深度的磁场分布 。
。
(7)将与对应深度的原始磁场采集数据 进行换算误差的计算,可以对重构后曲线进行深度换算的精度进行验证。本文采用相对残差来表示拟合误差,并通过二范数来定义相对残差RRE,即
进行换算误差的计算,可以对重构后曲线进行深度换算的精度进行验证。本文采用相对残差来表示拟合误差,并通过二范数来定义相对残差RRE,即
 (13)
(13)
(8)统一换算误差,取磁场三分量中相对残差最大值 作为对应深度的换算误差。
作为对应深度的换算误差。
根据3.2节的计算步骤,可计算得到门限值Q的取值与换算误差之间的关系见表5。
表5 不同门限值Q对应的不同深度之间换算误差表
Tab.5 Conversion error table for different depths corresponding to different threshold values Q
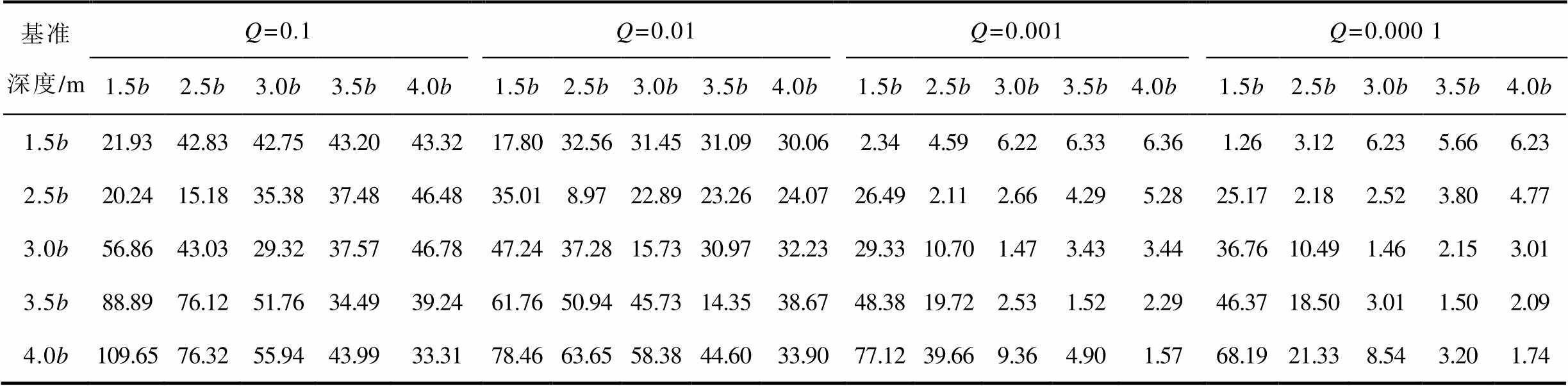
基准深度/mQ=0.1Q=0.01Q=0.001Q=0.000 1 1.5b2.5b3.0b3.5b4.0b1.5b2.5b3.0b3.5b4.0b1.5b2.5b3.0b3.5b4.0b1.5b2.5b3.0b3.5b4.0b 1.5b21.9342.8342.7543.2043.3217.8032.5631.4531.0930.062.344.596.226.336.361.263.126.235.666.23 2.5b20.2415.1835.3837.4846.4835.018.9722.8923.2624.0726.492.112.664.295.2825.172.182.523.804.77 3.0b56.8643.0329.3237.5746.7847.2437.2815.7330.9732.2329.3310.701.473.433.4436.7610.491.462.153.01 3.5b88.8976.1251.7634.4939.2461.7650.9445.7314.3538.6748.3819.722.531.522.2946.3718.503.011.502.09 4.0b109.6576.3255.9443.9933.3178.4663.6558.3844.6033.9077.1239.669.364.901.5768.1921.338.543.201.74
由计算结果可得:
(1)换算误差随着Q的取值减小而减小,当门限值Q=0.000 1时,换算误差最小。
(2)门限值Q=0.001对应的采样间隔为Q=0.000 1的3倍,但Q=0.000 1时换算误差无显著改善,因此当门限值取Q=0.001能在较少测量点的条件下实现较高的换算精度。
(3)对于同一基准深度来说,换算误差随着换算深度的增加而增大。这是由于信号重构后,基准深度本身存在一定误差,在进行深度换算时也会产生进一步的误差叠加造成的。
(4)由浅向深换算的误差远小于由深向浅,这是由于浅的磁场局部信息更复杂导致的。
(5)当门限值Q=0.001、基准深度为3.0b~4.0b范围时,能实现此范围内任意深度之间的高拟合度换算,换算误差皆小于10%。
为了验证结果的可靠性,本文在对潜艇模型进行分析后,采用相同方法对消磁后某型水面舰艇进行试验,(模型长度l=4.82m、船宽b=0.53m,其余实验布置与潜艇试验相同),试验对所提方法的有效性进行了检验,试验过程中,获取消磁后船模在1.5b、2.5b、3.0b、3.5b、4.0b和4.5b深度下的原始磁场分布,进行信号的特征提取和重构,并采用本文反演算法得到磁源分布,最后通过深度换算对方法进行验证。
值得注意的是,由于在实际舰船探测中,无法控制船体的航向,无法进行舰船固定磁性的分离,因此,试验将基于实际采集的数据进行。试验中磁通门传感器分别置于1.5b、2.5b、3.0b、3.5b、4.0b和4.5b六个不同深度,电机拖动装置控制船模以 的速度匀速通过传感器上方,测量距离为18m,实时测量舰船磁性分布,采样频率f=10Hz。
的速度匀速通过传感器上方,测量距离为18m,实时测量舰船磁性分布,采样频率f=10Hz。
船模通过时测得的不同深度磁场信号分布如图7所示。磁性处理后,不同深度下的磁场分布如图8所示。为了便于观察曲线的变化,磁场分布数据采用归一化处理,能量谱采用局部放大处理。
根据能量谱分布,取门限值为 ,根据式(4)计算得出的不同深度的磁场最大采样间隔见表6。
,根据式(4)计算得出的不同深度的磁场最大采样间隔见表6。
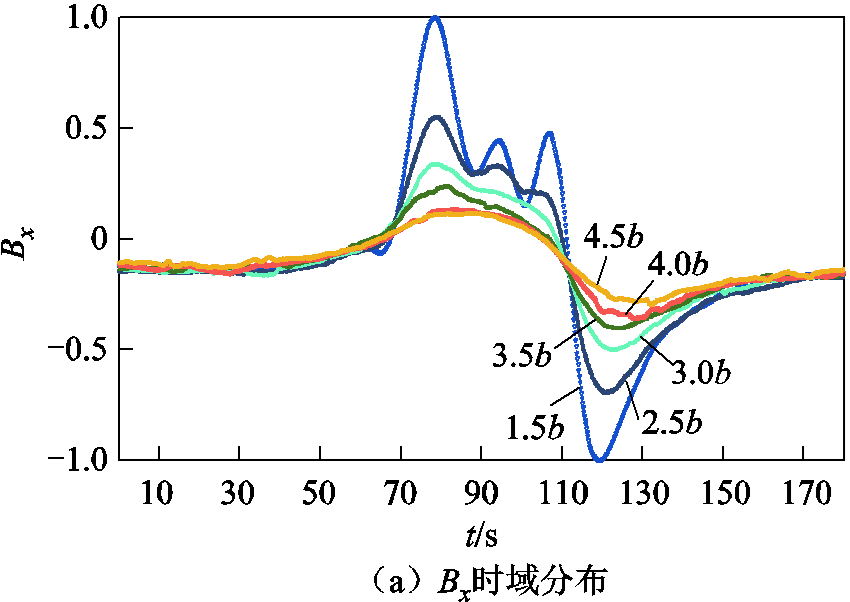
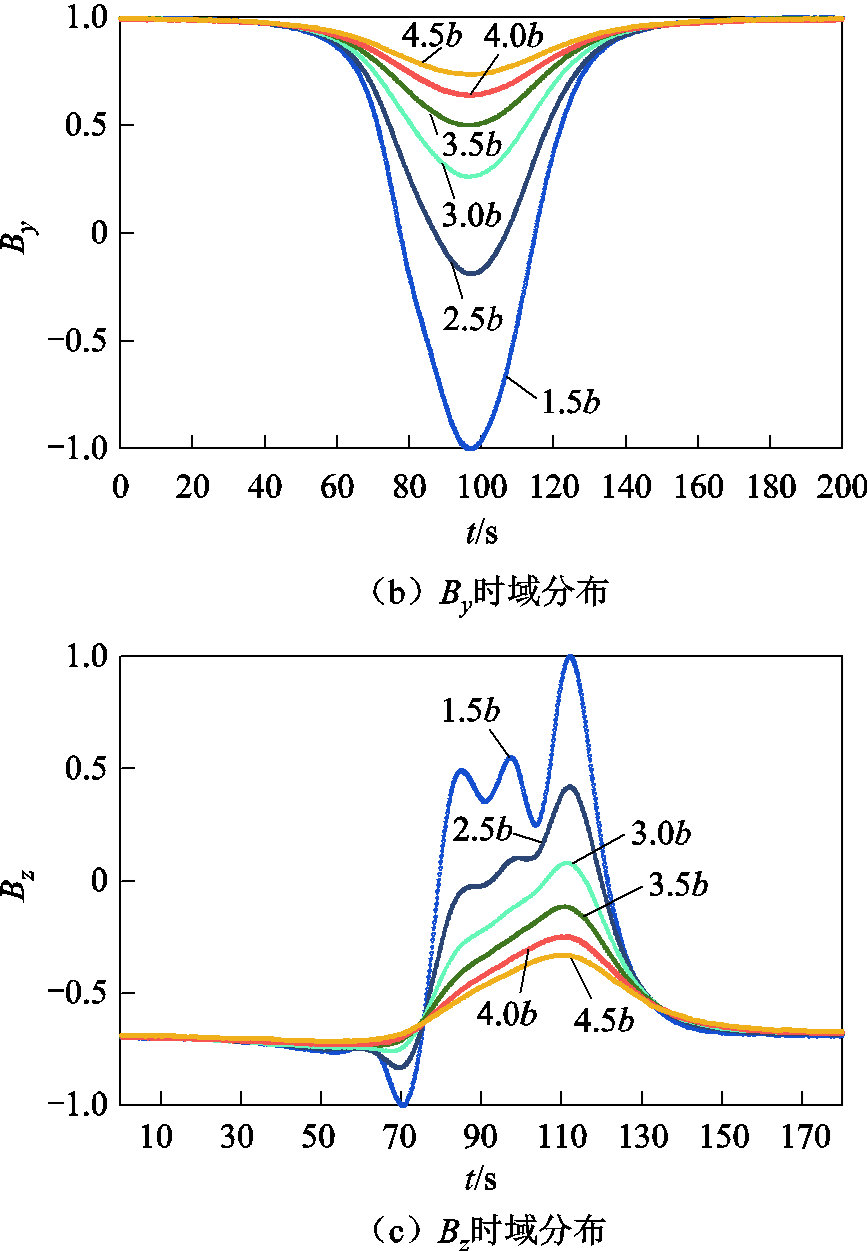
图7 磁性处理后,不同深度下的磁场分布
Fig.7 After magnetic treatment, magnetic field distribution at different depths
根据第4节中的算法步骤寻找磁偶极子分布及反演源强度,对磁场等效源强度进行计算并以不同深度为换算基准面,进行深度换算,不同深度之间的换算误差见表7。
由表6和表7可发现,由浅向深的换算误差皆小于7%,当基准深度不小于3.0b时,能同时完成由浅向深和由深向浅双向的深度换算,误差均小于10%。
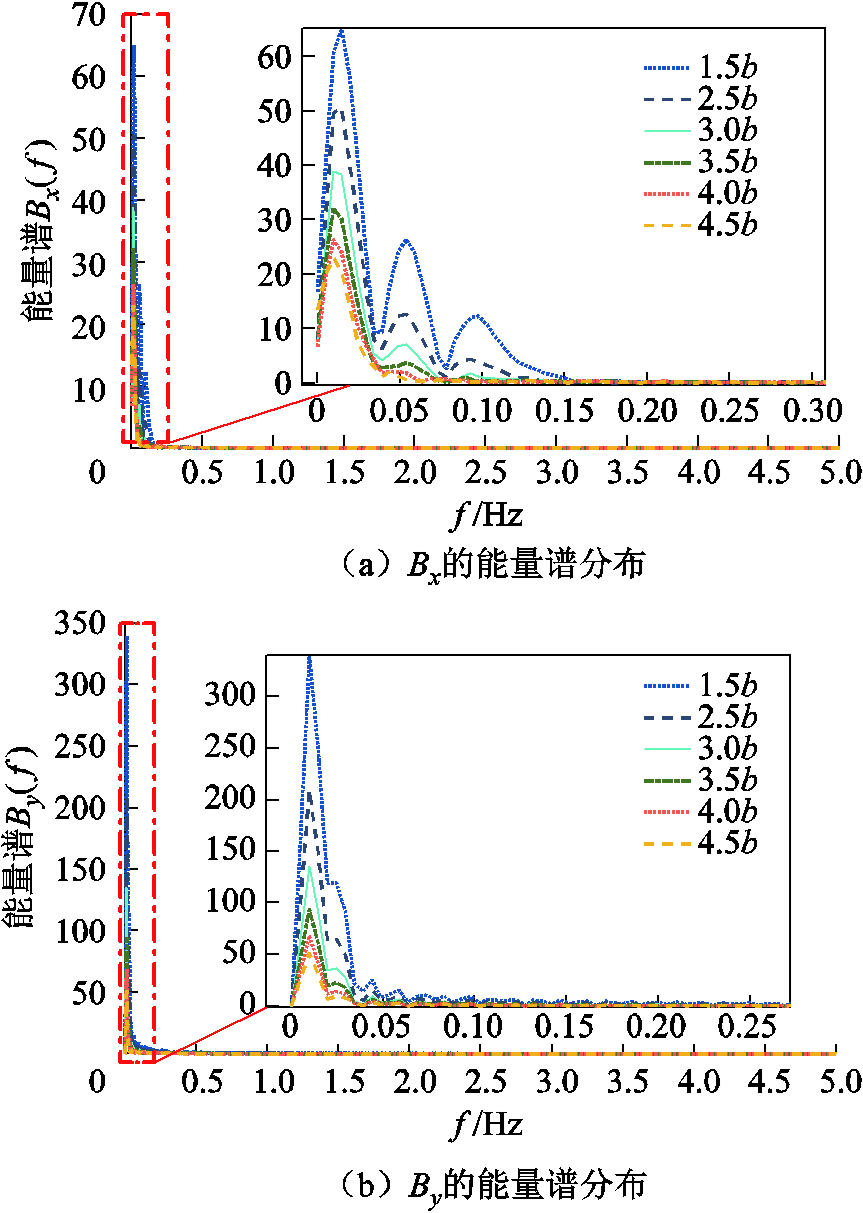
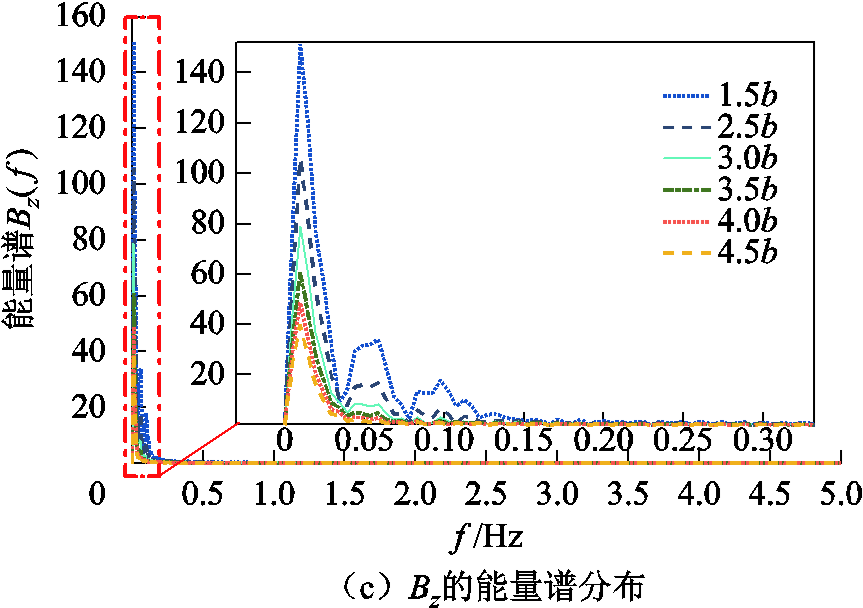
图8 船模消磁后,不同深度下的能量谱分布
Fig.8 After magnetic treatment, the magnetic field energy spectrum distribution at different depths
表6 不同深度的磁场最大采样间隔表
Tab.6 Nyquist interval table of magnetic fields at different depths

深度/m1.5b2.5b3.0b3.5b4.0b4.5b 采样间隔0.08l0.09l0.09l0.10l0.10l0.11l
表7 采用重构信号进行深度换算的误差分布表
Tab.7 Error distribution table of depth conversion using reconstructed signals(%)
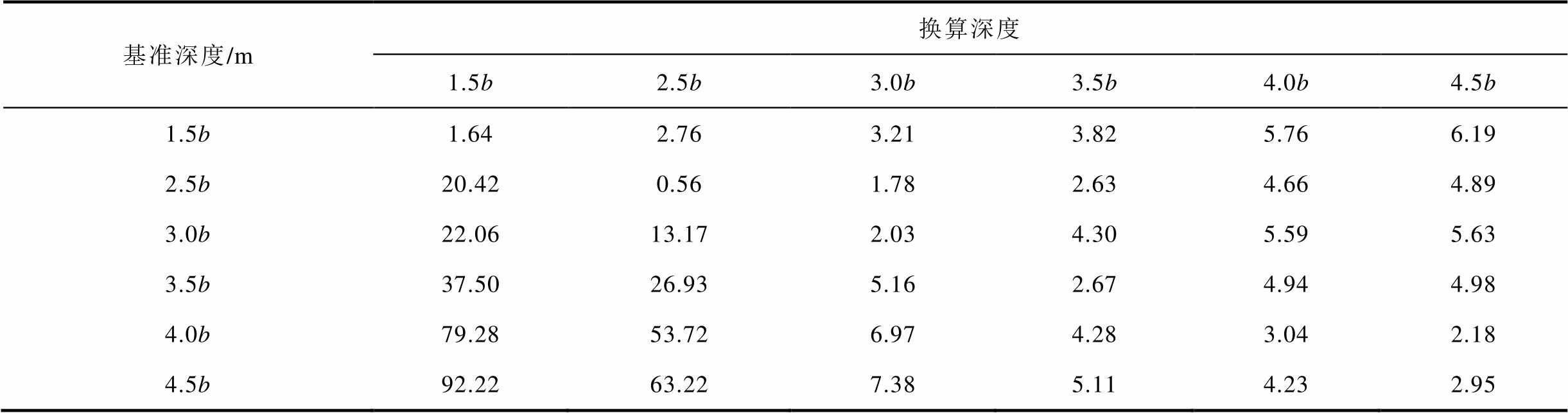
基准深度/m换算深度 1.5b2.5b3.0b3.5b4.0b4.5b 1.5b1.642.763.213.825.766.19 2.5b20.420.561.782.634.664.89 3.0b22.0613.172.034.305.595.63 3.5b37.5026.935.162.674.944.98 4.0b79.2853.726.974.283.042.18 4.5b92.2263.227.385.114.232.95
实际采样中,不同大小的信噪比会对换算精度产生不同的影响。信噪比的单位为dB,其计算表达式为
 (14)
(14)
式中, 为目标信号的峰-峰值;
为目标信号的峰-峰值; 为噪声的峰-峰值。信噪比越大,噪声越小,输出信号越有效。为了进一步验证所提方法的有效性,在原始信号中加入峰-峰值分别为5、10和20的高斯白噪声后进行深度换算,误差分布见表8。其中,反演误差表征位置均为舰船龙骨下方。
为噪声的峰-峰值。信噪比越大,噪声越小,输出信号越有效。为了进一步验证所提方法的有效性,在原始信号中加入峰-峰值分别为5、10和20的高斯白噪声后进行深度换算,误差分布见表8。其中,反演误差表征位置均为舰船龙骨下方。
表8 不同噪声状态条件下深度换算的误差分布表
Tab.8 Error distribution table of depth conversion under different noise conditions(%)
基准深度/mNp-p=5Np-p=10Np-p=20 1.5b2.5b3.0b3.5b4.0b4.5b1.5b2.5b3.0b3.5b4.0b4.5b1.5b2.5b3.0b3.5b4.0b4.5b 1.5b2.142.764.324.186.476.934.184.825.135.056.876.888.3411.3912.3913.1813.8214.02 2.5b22.131.872.382.985.215.8225.722.013.283.975.865.9230.9313.2410.269.318.718.32 3.0b25.3913.253.124.875.986.0329.3219.244.315.286.326.4443.1320.189.288.247.337.66 3.5b39.8728.835.833.285.015.1342.1830.275.914.275.815.9152.3134.2310.327.376.196.21 4.0b81.8353.727.134.824.034.2284.1260.249.195.296.216.32102.3471.3211.248.297.247.39 4.5b84.2358.328.335.824.484.1184.2358.329.236.116.376.4284.2358.3220.3113.289.249.13
由表8可知,加入噪声后,深度换算的误差随着噪声的增大而增大。当噪声峰-峰值Np-p为5和10、基准深度不小于3.0b时,系统信噪比较大,能同时完成由浅向深和由深向浅双向的深度换算,换算误差均小于10%。当噪声峰-峰值Np-p为20时,信噪比较小,此时换算出现较大误差。
为了实现对舰船磁场信号的准确重构及换算,在缩比模型试验数据分析的基础上,建立截止频率与最大能谱的关系,得出适用于磁场信号的最大采样间隔并完成磁场信号的重构,通过深度换算完成对本文方法的验证。
结果显示,该方法对舰船目标的形状鲁棒性好,能同时适用于潜艇和水面舰艇的磁场反演和不同深度的磁场换算,换算效果较好,相较传统的磁场重构方法,减少了数据处理量。在较大的采样间隔下完成了高精度的磁场拟合,能实现信号采集不全的情况下完成对完整曲线的正确反演,并在后续的深度换算中实现高精度深度换算。在信噪比较大、基准深度不小于3.0b条件下,由浅向深和由深向浅双向的深度换算误差均小于10%。下一步工作重点是通过海上试验验证方法的有效性。
参考文献
[1] 苑曦宸, 张彬, 孟智悦, 等. 磁场促进生物体内氧气利用的机制及其医学应用[J]. 电工技术学报, 2021, 36(4): 676-684.
Yuan Xichen, Zhang Bin, Meng Zhiyue, et al. Mechanism of magnetic field promoting oxygen utilization in organism and its medical application[J]. Transactions of China Electrotechnical Society, 2021, 36(4): 676-684.
[2] 王明杰, 徐伟, 杨存祥, 等. 基于精确子域模型的永磁直线同步电机空载磁场解析计算[J]. 电工技术学报, 2020, 35(5): 942-953.
Wang Mingjie, Xu Wei, Yang Cunxiang, et al. Analytical calculation of no-load magnetic field in permanent magnet linear synchronous motors based on an accurate subdomain model[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 942-953.
[3] 于占洋, 李岩, 井永腾, 等. 基于混合磁场解析法的磁极偏心型表贴式永磁同步电机空载特性分析[J]. 电工技术学报, 2020, 35(18): 3811-3820.
Yu Zhanyang, Li Yan, Jing Yongteng, et al. No-load characteristic analysis of surface-mounted permanent magnet synchronous motor with non-concentric pole based on hybrid magnetic field analysis method[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3811-3820.
[4] Chang Shuai, Lin Ye, Zheng Y R, et al. Simultaneous detection of multiple magnetic dipole sources[J]. IEEE Transactions on Magnetics, 2020, 56(9): 1-11.
[5] Chadebec O, Coulomb J L, Leconte V, et al. Modeling of static magnetic anomaly created by iron plates[J]. IEEE Transactions on Magnetics, 2000, 36(4): 667-671.
[6] Chadebec O. Modelisation Du Champ Magnetique Induit Par Des Toles Identification De L’aimantation[D].Grenoble: Institut National Polytechnique de Grenoble, 2001.
[7] Kahler G R, Della Torre E. Minimizing the deformation of a static magnetic field by the presence of a ferromagnetic body[J]. IEEE Transactions on Magnetics, 1991, 27(6): 5025-5027.
[8] Rioux-Damidau F, Bandelier B. Perturbation of a static magnetic field by a thin shell ferromagnetic device[J]. IEEE Transactions on Magnetics, 1993, 29(6): 2434-2436.
[9] Rioux-Damidau F, Bandelier B, Penven P. A fast and precise determination of the static magnetic field in the presence of thin iron shells[J]. IEEE Transactions on Magnetics, 1995, 31(6): 3491-3493.
[10] Kildishev A V, Nyenhuis J A. Multipole imaging of an elongated magnetic source[J]. IEEE Transactions on Magnetics, 2000, 36(5): 3108-3111.
[11] Kildishev A V, Nyenhuis J A, Morgan M A. Multipole analysis of an elongated magnetic source by a cylindrical sensor array[J]. IEEE Transactions on Magnetics, 2002, 38(5): 2465-2467.
[12] 王金根, 龚沈光, 刘胜道. 磁性目标的高精度建模方法[J]. 海军工程大学学报, 2001, 13(3): 49-52.
Wang Jingen, Gong Shenguang, Liu Shengdao. High accuracy method for modelling magnetic objects[J]. Journal of Naval University of Engineering, 2001, 13(3): 49-52.
[13] 王桓, 周耀忠, 周国华. PSO算法在舰船磁场磁体模拟中的应用[J]. 海军工程大学学报, 2007, 19(1): 105-107, 112.
Wang Huan, Zhou Yaozhong, Zhou Guohua. Application of particle swarm optimism to magnet simulation[J]. Journal of Naval University of Engineering, 2007, 19(1): 105-107, 112.
[14] 徐杰, 刘大明, 周国华, 等. 一种基于遗传优化算法的潜艇高空磁场换算方法[J]. 舰船科学技术, 2009, 31(1): 156-159, 163.
Xu Jie, Liu Daming, Zhou Guohua, et al. Application of genetic algorithm in continuation of magnetic field of submarines in high areas[J]. Ship Science and Technology, 2009, 31(1): 156-159, 163.
[15] 戴忠华, 周穗华, 单珊. 基于模拟退火算法的舰船磁场高精度建模方法[J]. 电子学报, 2018, 46(6): 1524-1529.
Dai Zhonghua, Zhou Suihua, Shan Shan. High accuracy method for ship magnetic field based on simulated annealing algorithm[J]. Acta Electronica Sinica, 2018, 46(6): 1524-1529.
[16] 郭成豹, 殷琦琦. 舰船磁场磁单极子阵列法建模技术[J]. 物理学报, 2019, 68(11): 106-115.
Guo Chengbao, Yin Qiqi. Magnetic monopole array model for modeling ship magnetic signatures[J]. Acta Physica Sinica, 2019, 68(11): 106-115.
[17] 常宜, 祝小雨. 磁偶极子与大椭球混合建模法在船舶磁场推算中的研究[J]. 舰船电子工程, 2016, 36(1): 140-142.
Chang Yi, Zhu Xiaoyu. Research of magnetic dipole and ellipsoid hybrid modeling in marine magnetic field calculation[J]. Ship Electronic Engineering, 2016, 36(1): 140-142.
A Signal Reconstruction and Conversion Method of Magnetic Field under Ship
Abstract In order to realize the accurate reconstruction and conversion of the ship magnetic field signal, based on the analysis of the scaled model test data, this paper first analyzes the time-frequency characteristics of the ship model magnetic field after magnetic treatment, establishes the relationship between the cutoff frequency and the maximum energy spectrum, and obtains the mathematical model between the sampling interval and the ship length, and then puts forward the calculation method of the maximum sampling interval suitable for the magnetic field. Finally, the magnetic field depth conversion is carried out by combining the magnet simulation method to verify the method in this paper. The results show that the method has good robustness to target shape, and it is suitable for both surface ships and underwater submarine targets. Under the condition of large sampling interval, high precision signal reconstruction can be completed. When the conversion is carried out from shallow to deep, the conversion error is less than 7%. When the conversion reference depth is not less than 3 times the ship width, the magnetic field conversion from shallow to deep and from deep to shallow can be completed, and the conversion error is less than 10%.
Keywords:Ships magnetic field, energy spectrum, maximum sampling interval, signal reconstruction, depth conversion
DOI:10.19595/j.cnki.1000-6753.tces.210801
中图分类号:TM 153
收稿日期 2021-05-28
收稿日期 2021-10-25
刘 琪 女,1996年生,博士,研究方向为电磁环境及防护技术。E-mail:751795894@qq.com
姜润翔 男,1982年生,助理研究员,硕士生导师,研究方向为电磁环境及防护技术。E-mail:jiang_runxiang@163.com(通信作者)
(编辑 郭丽军)