 (1)
(1)
式中,q1、q2分别为基波平面和2次谐波平面在任意速坐标系下的相位电角度;a 为相带,a=2p/5。
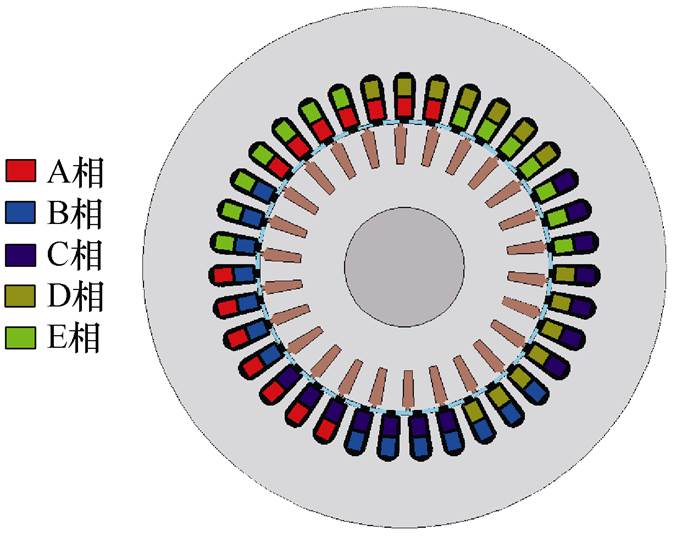
图1 FIM绕组结构
Fig.1 The FIM’s winding schematic
摘要 针对五相感应电机(FIM)指数响应转矩跟踪电子变极运行不平稳问题,分析得出转子磁链饱和是导致该问题的主要原因之一,计及磁链饱和提出一种转子磁链优化(RFO)电子变极控制策略。分析了FIM电子变极过程中两个控制平面转子磁链叠加是导致磁链饱和的原因,设计了转子磁链控制函数,并采用磁链幅值和电磁转矩约束函数使转子磁链逼近临界值,优化了转子磁链控制。基于FIM的Speedgoat半实物实验平台,对所提RFO方法进行了实验验证,对采用和未采用RFO的指数响应转矩跟踪电子变极控制策略进行对比实验研究。实验结果表明,所提策略使转速波动减小了50%,转矩波动减小了67%,有效改善了电子变极过程中电机运行平稳性。
关键词:五相感应电机(FIM) 电子变极 磁链饱和 约束函数 转子磁链优化(RFO)
多相感应电机(Multi-phase Induction Motor, MIM)因其具有高速高效率、高过载能力、高可靠性和容错性、相对简单的设计、低成本、结构紧凑等[1-4],同时在运行过程中可有效地降低谐波、减小转矩脉动等优点,特别适合应用于电动汽车驱动、舰船全电驱动、航空器驱动等领域[5-6]。以电动汽车的驱动系统[7-9]和混合动力电动汽车的起动/发电一体机[10]为例,要求电机恒功率运行,能在起动和低速时提供大的转矩和宽广的调速范围,为了满足该要求,可以使用更大功率电机,但是这会导致电机尺寸更大,对功率器件的要求也更高;还可以通过设计电机的转子槽等方法来降低漏感,然而往往会导致电机转矩脉动增大。另外,MIM可以通过变极满足该要求,MIM变极可在恒功率运行时扩展速度范围且在加载条件下比固定极对数运行具有更好的效率,最大限度地减少了不同操作区域的损耗和定子电流,提高了机器的过载能力,可以在高速下降低互感[11]。
近年来,国内外学者对多相电机变极技术做了广泛研究。文献[12]基于搭建的六相感应电机模型,采用斜坡响应的变极方法实现了不停电的极对数变换,但在变极过程中仍存在较大的转矩跌落。文献[13]实现了MIM的三相/十二极和九相/四极之间的变极切换,但电机系统的动态响应慢。文献[14]提出一种基于指数响应转矩电流切换的MIM电子变极策略,减小了电机在动态变极过程中的转矩和转速波动。文献[15]在文献[14]的基础上,采用指数响应策略结合电流滑模控制器实现了1平面和2平面之间更为平滑的电子变极切换。文献[16]研究了五相感应电机(Five phase Induction Motor, FIM)斜坡响应转矩跟踪的电子变极方法,相比转矩电流切换的方法,有效降低了转矩和转速波动。文献[17-18]研究了线性起动永磁电机的变极控制策略,实现六极/八极的转换,在变极过程中,存在速度下降、过渡不平稳等问题。文献[19]探索了在MIM变极前、后分别运行在四极和十二极模式下减小转矩脉动和提高直流电压利用率的方法。文献[20]提出一种改进的MIM四极/十二极的变极结构,在故障情况下提高了系统的可靠性,在高极模式下通过改进逆变器实现转矩脉动降低,在低极模式下利用3次谐波注入提高了直流电压利用率。文献[21]提出MIM变极根据转矩和速度选择极对数,以减小稳态功率损耗和定子电流。文献[22]在MIM上实现了四极/八极的转换,采用阶跃响应的转矩控制和斜坡响应的转子磁链控制,以提高变极时转矩的平稳性。文献[23-24]基于六相感应电机提出一种变极方法,改善了电机的峰值转矩并提高了电机效率,但需要对逆变器、传感器等硬件进行改进。文献[25-27]研究了MIM极对数与相位数组合的变极方法,实现了宽广的调速范围,但是需要改进定子槽的结构和数量,且会使空间谐波的幅度变大导致转矩脉动较大。综上所述,多相电机变极主要在变极动态切换过程和变极前、后稳态控制策略,以及对逆变器、定子槽等硬件设计优化方面展开研究[28]。目前,多相电机的电子变极控制优化主要是对q轴电流的控制,而变极过程中存在的磁链交叉问题未被考虑。
三相感应电机等考虑磁饱和特性来优化磁链以提高电机效率的控制算法已有研究[29-34]。文献[29]提出一种考虑感应电机磁饱和特性的转矩控制算法来搜索最优转子磁链,进一步减小了定子电流。文献[30]设计了一种感应电机的最大转矩电流比控制算法,补偿了由磁饱和引起的电感变化,获得了更高的转矩电流比,提高了电机效率。文献[31]基于感应电机提出了考虑电流和电压交叉耦合问题的一种统一的复矢量磁场控制方法。但MIM电子变极过程中磁饱和问题未被提出和研究。
本文分析了FIM在电子变极过程中存在的磁链饱和问题,采用指数响应和转矩跟踪结合的方法来控制变极切换,基于该方法设计了转子磁链优化(Rotor Flux Optimization, RFO)控制策略,以改善变极过程中磁链饱和导致的电机运行不平稳问题。首先分析了两个控制平面转子磁链叠加会导致磁链饱和;接着设计了转子磁链控制函数和RFO约束函数,从而确定d轴电流变极控制策略,实现磁链优化控制;最终将本文所提基于RFO电子变极控制策略在FIM的Speedgoat半实物实验平台上进行了验证。
本文所用的FIM为对称分布式绕组,相带为2p/5含有偶次谐波,可以实现基波1平面和2次谐波2平面的连续变极切换,FIM绕组结构如图1所示。
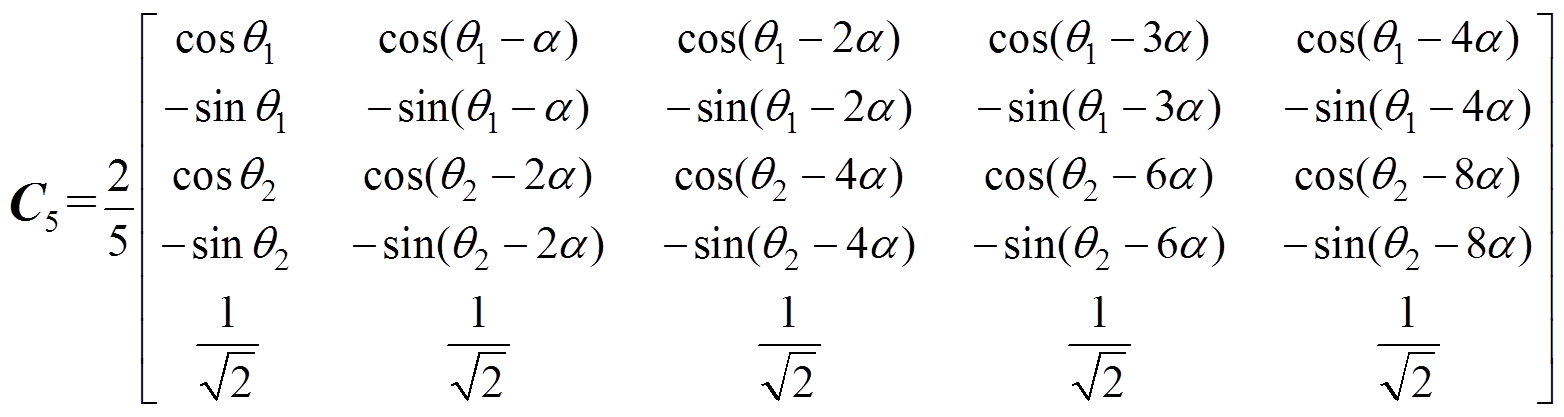
将实验用FIM从自然坐标系下电机的状态方程进行恒幅值坐标矩阵变换,有
(1)
式中,q1、q2分别为基波平面和2次谐波平面在任意速坐标系下的相位电角度;a 为相带,a=2p/5。
图1 FIM绕组结构
Fig.1 The FIM’s winding schematic
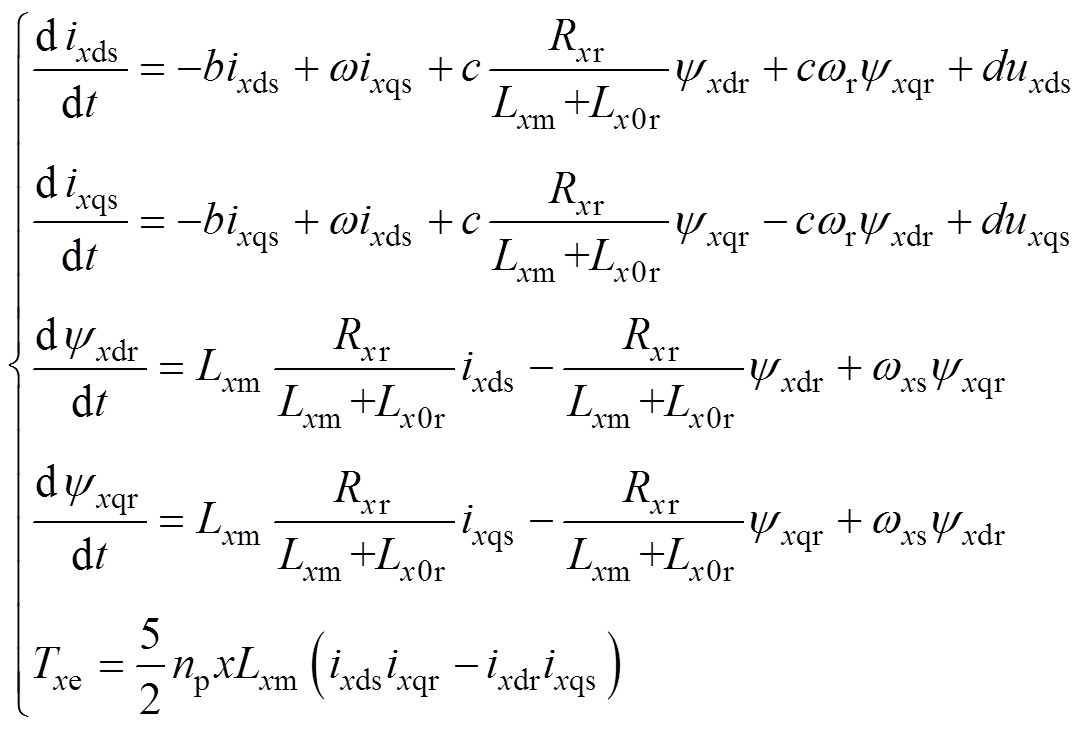
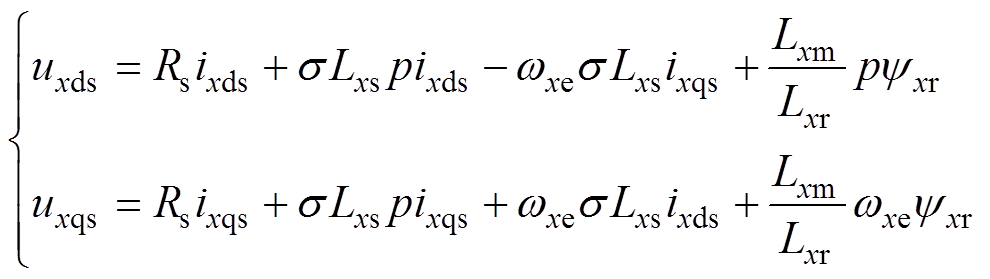
基于转子磁场定向矢量控制的FIM在同步速坐标系下的直流分量构成d1q1基波平面和d2q2 2次谐波平面,dq同步旋转坐标系下基波和谐波平面的数学模型为
 (2)
(2)
其中
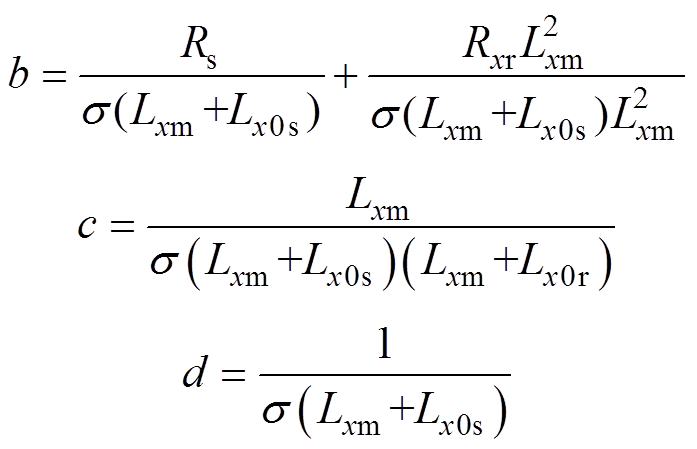
式中,x为FIM的dq平面(取值为1或2,取1时为基波平面,取2则为2次谐波平面);uxds、uxqs分别为各次谐波定子电压的d、q分量;ixds、ixqs、ixdr、ixqr分别为各次谐波的定子电流和转子电流的d、q分量;yxdr、yxqr分别为x平面d轴和q轴磁链;Lxm、Lx0s、Lx0r分别为各次谐波的定子励磁电感、定子漏感和转子漏感;w、wr分别为定子和转子的电角度;Txe为各次谐波的电磁转矩;np为电机的极对数;Rs、Rxr分别为各次谐波的定子电阻和折算后的转子电阻;wxs为各次谐波的转差频率;s 为漏感因子。
当两相同步旋转坐标系按转子磁场定向时,有
 (3)
(3)
式中,yxr为x平面的转子磁链;Txr为x平面的转子时间常数;p为微分算子。
电子变极的工作原理为:利用多相感应电机具有多个控制自由度,即经过坐标变换形成多个相互解耦的控制平面,在不同的控制平面内生成相应极对数的旋转磁场,通过控制不同平面的dq电流切换,则可实现电子变极[10-12]。本文FIM有d1q1和d2q2两个相互正交的控制平面,基于转子磁场定向矢量控制把定子电流分解为励磁电流分量i1ds、i2ds和转矩电流分量i1qs、i2qs,变极的切换本质就是i1ds、i2ds和i1qs、i2qs相互切换的过程,在此过程中进行电流的分配,顺利完成变极。
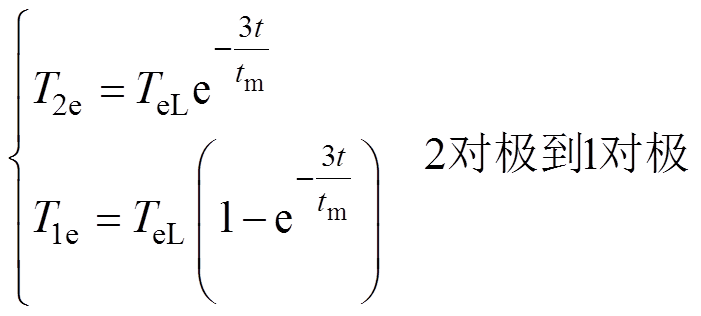
根据现有研究文献可知,电子变极切换的响应方法主要有阶跃响应、斜坡响应和指数响应,已有研究结果表明,同等条件下指数响应控制的转矩和转速波动更小[14-16];而在响应方法相同时,比转矩电流控制效果更优的是电磁转矩跟踪控制,该控制是对电磁转矩直接进行控制切换[16],根据式(2)可得电磁转矩T1e、T2e。
本文采用文献[15]中的指数响应与文献[16]中的转矩跟踪相结合的方法来控制电子变极,即通过控制指数响应的电磁转矩T1e、T2e切换和给定的励磁电流i1ds、i2ds实现电子变极,将指数响应速度优化为 ,并将指数响应的电磁转矩跟踪归一化设计,其表达式为
,并将指数响应的电磁转矩跟踪归一化设计,其表达式为
 (4)
(4)
 (5)
(5)
式中,t为变极时刻减去变极开始时刻;tm为变极总时长。
 (6)
(6)
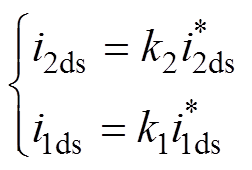
式中,k1和k2为常系数; 和
和 分别为1、2平面励磁电流给定分量的参考值。在文献[15]中指出,在变极的过程中励磁电流分量保持不变比按照斜坡变化更有利于减少转矩的波动。以1对极向2对极变化为例,变极结束前k1取1,变极结束后k1取0;变极开始前k2取0,变极开始后k2取0。
分别为1、2平面励磁电流给定分量的参考值。在文献[15]中指出,在变极的过程中励磁电流分量保持不变比按照斜坡变化更有利于减少转矩的波动。以1对极向2对极变化为例,变极结束前k1取1,变极结束后k1取0;变极开始前k2取0,变极开始后k2取0。
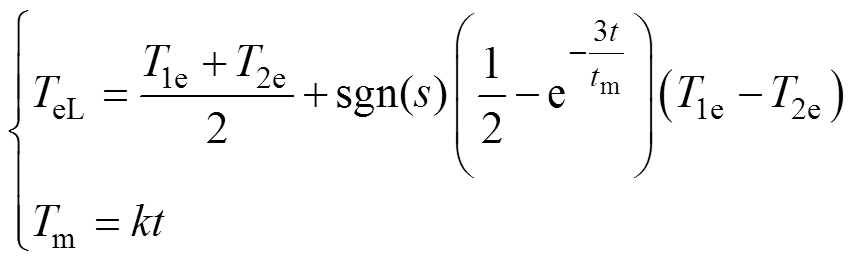
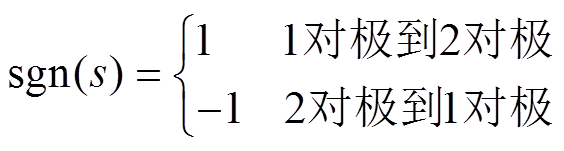
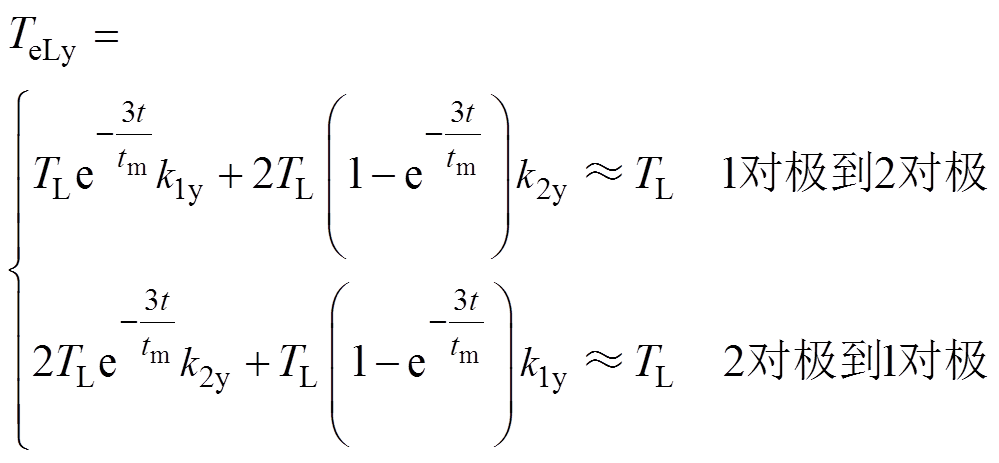
将1对极向2对极变化和2对极向1对极变化的电磁转矩跟踪TeL归一化表达为
 (7)
(7)
 (8)
(8)
式中, 为电子变极模式。
为电子变极模式。
2.1.1 电子变极前后转子磁链特性分析
本文研究的电子变极的运行条件是在额定转速以下,稳态时电机运行在恒转矩区域。采用基于转子磁场定向的矢量控制实现稳态解耦,d轴电流为励磁电流ixds控制转子磁链的大小,q轴电流为转矩电流ixqs控制电磁转矩的大小[35]。那么电流约束要满足
 (9)
(9)
式中,ismax为最大定子相电流。
电压约束要满足
 (10)
(10)
式中,Usmax为最大定子相电压;Udc为直流母线电压。
FIM的ismax取值通常由逆变器器件及电机本身散热等条件决定;Usmax由当前直流端输入电压Udc决定。
d轴电流ixds和转子磁链 的关系见式(3)。若在变极之前或变极之后处于稳态时,转子磁链几乎不变,转子时间常数近似为定值,则可将式(3)进一步简化为
的关系见式(3)。若在变极之前或变极之后处于稳态时,转子磁链几乎不变,转子时间常数近似为定值,则可将式(3)进一步简化为
 (11)
(11)
式中, 、
、 分别为各次谐波转子磁链的额定值和定子电流的d轴分量的额定值。
分别为各次谐波转子磁链的额定值和定子电流的d轴分量的额定值。
由式(11)可便捷算出FIM在变极之前和变极之后处于不同平面时励磁电流与转子磁链的关系。电流额定值的设定要考虑磁链饱和、最大转矩输出和电机效率等因素,确保电机处于良好工作状态。ixds的取值若为满足电磁转矩最大,则有式(2)中的电磁转矩公式和式(11)结合推导出
 (12)
(12)
式中,Lxr为各次谐波的转子电感。
对Txe求极值,则可得 而一般情况其取值
而一般情况其取值
2.1.2 电子变极过程中转子磁链特性分析
基于转子磁场定向矢量控制的FIM在电子变极过程中既有基波1平面的额定磁链 又有谐波2平面的额定磁链
又有谐波2平面的额定磁链 ,有
,有
 (13)
(13)
式中,和分别为基波1平面的额定磁链和谐波2平面的额定磁链。
两个磁链的叠加导致变极过程中磁链交叉饱和,可将变极过程中的转子磁链表示为
 (14)
(14)
式中, 为变极过程中的转子磁链;q1、q2分别为1和2控制平面的磁链偏移角度;w1、w2分别为1和2控制平面的定子电压频率。由FIM的1和2控制平面关系以及电子变极磁链特性可知:w2= 2w1,q1=q2。
为变极过程中的转子磁链;q1、q2分别为1和2控制平面的磁链偏移角度;w1、w2分别为1和2控制平面的定子电压频率。由FIM的1和2控制平面关系以及电子变极磁链特性可知:w2= 2w1,q1=q2。
若采用实验电机的值0.6Wb和幅值关系 =
= ,设定转速为800r/min,由式(13)和式(14)可得电子变极过程中的转子磁链分布如图2所示,可见两个平面磁链叠加形成的变极转子磁链幅值
,设定转速为800r/min,由式(13)和式(14)可得电子变极过程中的转子磁链分布如图2所示,可见两个平面磁链叠加形成的变极转子磁链幅值 ,高于1平面的值,明显高于2平面的值,而1平面和2平面的磁链值是额定值即临界饱和值,那么在电子变极过程中两者叠加的磁链对1平面和2平面来说,均出现磁饱和而导致电感参数呈现明显的饱和非线性特性,使变极过程中转矩、转速波动加剧和相电流变大,使磁场定向不准控制偏差增大。
,高于1平面的值,明显高于2平面的值,而1平面和2平面的磁链值是额定值即临界饱和值,那么在电子变极过程中两者叠加的磁链对1平面和2平面来说,均出现磁饱和而导致电感参数呈现明显的饱和非线性特性,使变极过程中转矩、转速波动加剧和相电流变大,使磁场定向不准控制偏差增大。

图2 FIM电子变极过程中转子磁链分布
Fig.2 The rotor magnetic flux distribution of the FIM electronic pole-changing process
同时,分析各平面定子电压平衡方程式(15),由于变极过程中磁链突变,磁链微分项不再为零,且转矩电流按照指数响应变化,则d、q轴存在有交叉耦合 将进一步加剧电子变极动态切换过程中的控制系统偏差。
将进一步加剧电子变极动态切换过程中的控制系统偏差。
 (15)
(15)
其中
式中,Lxs为各次谐波的定子电感; 为各次谐波同步电角频率。
为各次谐波同步电角频率。
综上所述,电子变极过程中的磁链饱和还会导致磁链交叉耦合等问题。由式(13)和式(14)可知,通过控制1平面与2平面的励磁电流分配则可控制,从而改善电子变极过程中电机运行不平稳问题。
在未采用RFO的FIM电子变极过程中,两个平面的励磁电流均使用额定励磁电流,会导致磁饱和以及磁链交叉耦合,对电感产生影响,进而对电磁转矩和控制系统造成影响。为改善变极过程中的上述问题,本文设计了RFO电子变极控制策略,通过对励磁电流的控制来优化变极过程中转子磁链。
在RFO设计时,要同时兼顾1平面和2平面,数值上不能过大会导致磁饱和,也不能过小导致磁链不饱和使电机效率降低,要使其尽量逼近临界磁链值,即对两个平面来说均较为接近临界饱和磁链。
由此设定变极过程中转子磁链幅值的取值范围为
 (16)
(16)
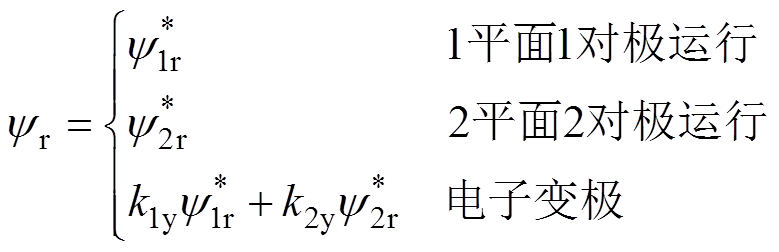
依据FIM变极为1平面和2平面的切换,设计出变极过程中优化磁链 的控制函数为
的控制函数为
 (17)
(17)
式中,k1y、k2y分别为磁链 、
、 的待定优化系数。
的待定优化系数。
对的幅值限值约束,有
 (18)
(18)
根据1平面转子磁链幅值为2平面的2倍,两个平面的参数关系转换为统一用1平面转子磁链表示为
 (19)
(19)
设定式(19)为RFO待定优化系数k1y和k2y的约束函数一。
设定电子变极过程中总电磁转矩TeLy逼近负载转矩TL,以减小转矩波动为目标,定义两者的误差值为eT,使其接近零值,有
 (20)
(20)
电子变极过程中总电磁转矩为
 (21)
(21)
式中,TeLy、T1ey、T2ey分别为变极过程中的总电磁转矩、1平面的电磁转矩和2平面的电磁转矩。
由式(4)、式(12)和式(13),推导出1对极向2对极变极过程中1和2平面的电磁转矩函数为
 (22)
(22)
式中,i1dsy、i2dsy分别为变极时1平面和2平面定子电流d轴分量的动态变化值。
由式(5)、式(12)和式(13),推导出2对极向1对极变极过程中1和2平面的电磁转矩函数为
 (23)
(23)
由式(20)~式(23)以及变极过程电机物理量之间演变关系,推得电磁转矩约束函数为
 (24)
(24)
设定式(24)为RFO待定优化系数k1y和k2y的约束函数二。
满足上述约束函数式(19)和式(24),并考虑电子变极过程两个控制平面的共存和互相交替特性,确定RFO系数取值为k1y 0.8,k1y0.7,则采用RFO的如图3所示,其幅值近似等于
0.8,k1y0.7,则采用RFO的如图3所示,其幅值近似等于 ,且有约2/3段的幅值在和
,且有约2/3段的幅值在和 之间。
之间。
结合式(13)和式(17)设计FIM电子变极转子磁链归一化表达式为
 (25)
(25)
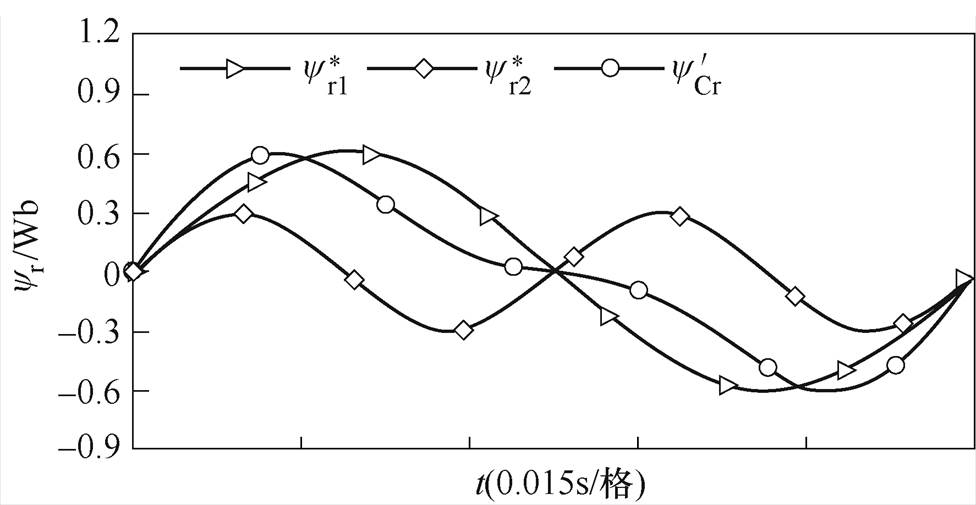
图3 采用RFO的FIM电子变极过程中转子磁链分布
Fig.3 The rotor magnetic flux distribution with RFO of the FIM electronic pole-changing process
那么根据式(19)、式(24)和式(25),确定电子变极过程中的励磁电流 ,则采用RFO的励磁电流控制式为
,则采用RFO的励磁电流控制式为
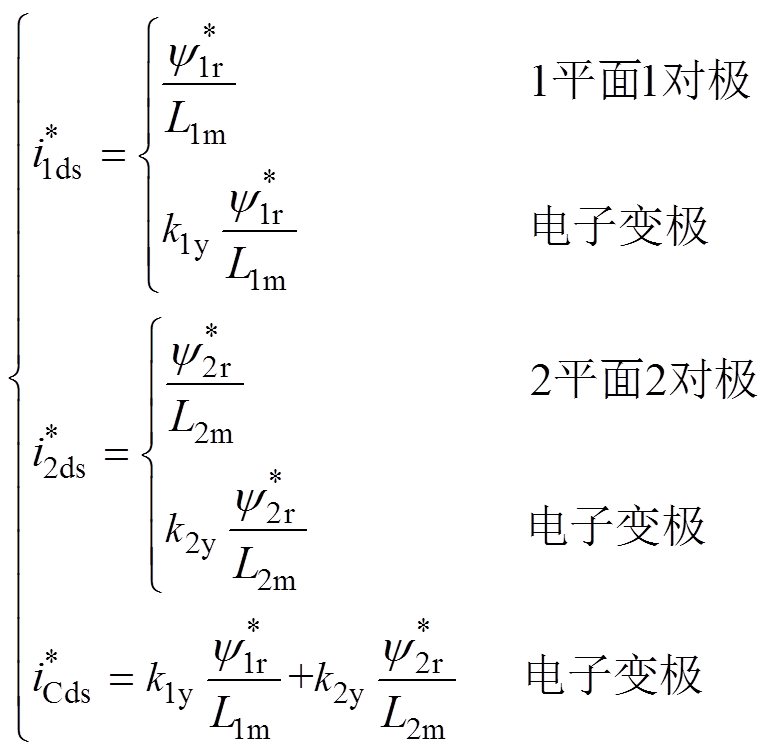 (26)
(26)
基于RFO的FIM指数响应转矩跟踪电子变极系统控制框图如图4所示。
图4中,点画线框内为RFO控制策略,根据式(19)、式(24)和式(26)设计,是将电子变极过程中的励磁电流分为1平面与2平面两部分,采用RFO系数对这两个平面的励磁电流优化控制,从而迫使逼近磁链临界饱和值,则其不会过大饱和或过小不饱和,与未采用RFO的电流给定方法式(6)相比,可有效抑制转子磁链饱和,削弱变极过程中转矩、转速的波动,减小系统控制偏差。图4中点画线框内的指数响应转矩跟踪变极切换,按照式(4)、式(5)和式(7)设计,本文电子变极实验均基于该变极切换方法。
为了验证所提RFO电子变极控制策略的有效性,搭建如图5所示的Speedgoat半实物实验平台。实验用FIM参数见表1。本文实验中设置五相逆变器直流母线电压300V,Speedgoat驱动控制的电流采样周期为100ms,转速为800r/min。
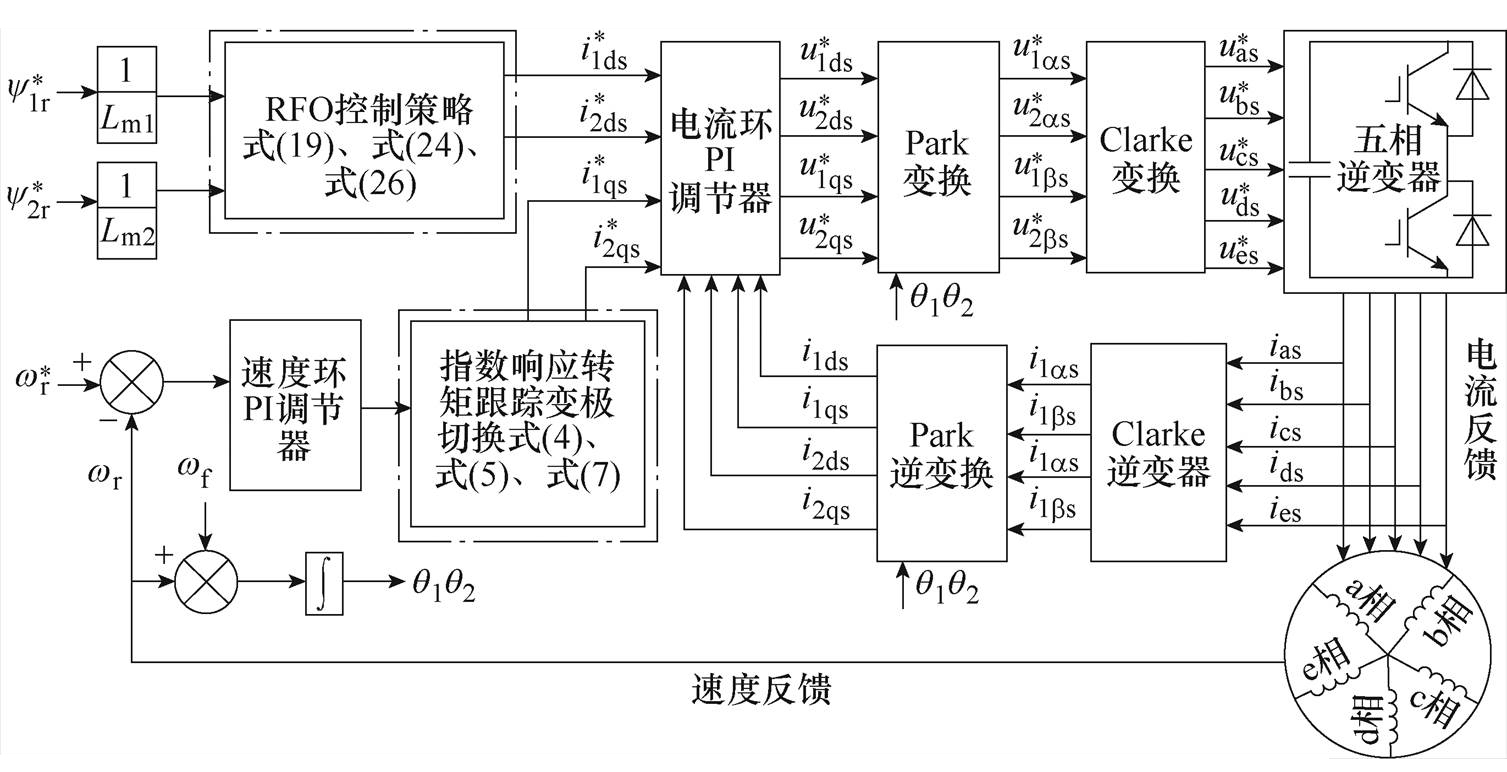
图4 基于RFO的FIM电子变极控制系统框图
Fig.4 The electronic pole-changing control system block diagram of FIM based on RFO
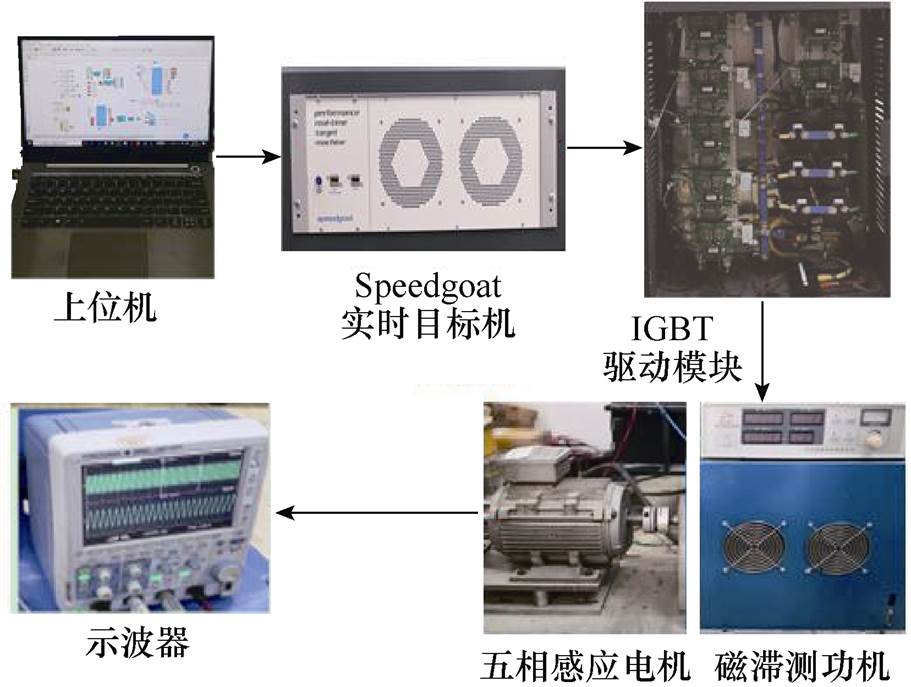
图5 FIM电子变极控制系统实验平台
Fig.5 The electronic pole-changing control system experimental platform of FIM
表1 FIM的参数
Tab.1 Parameters of FIM
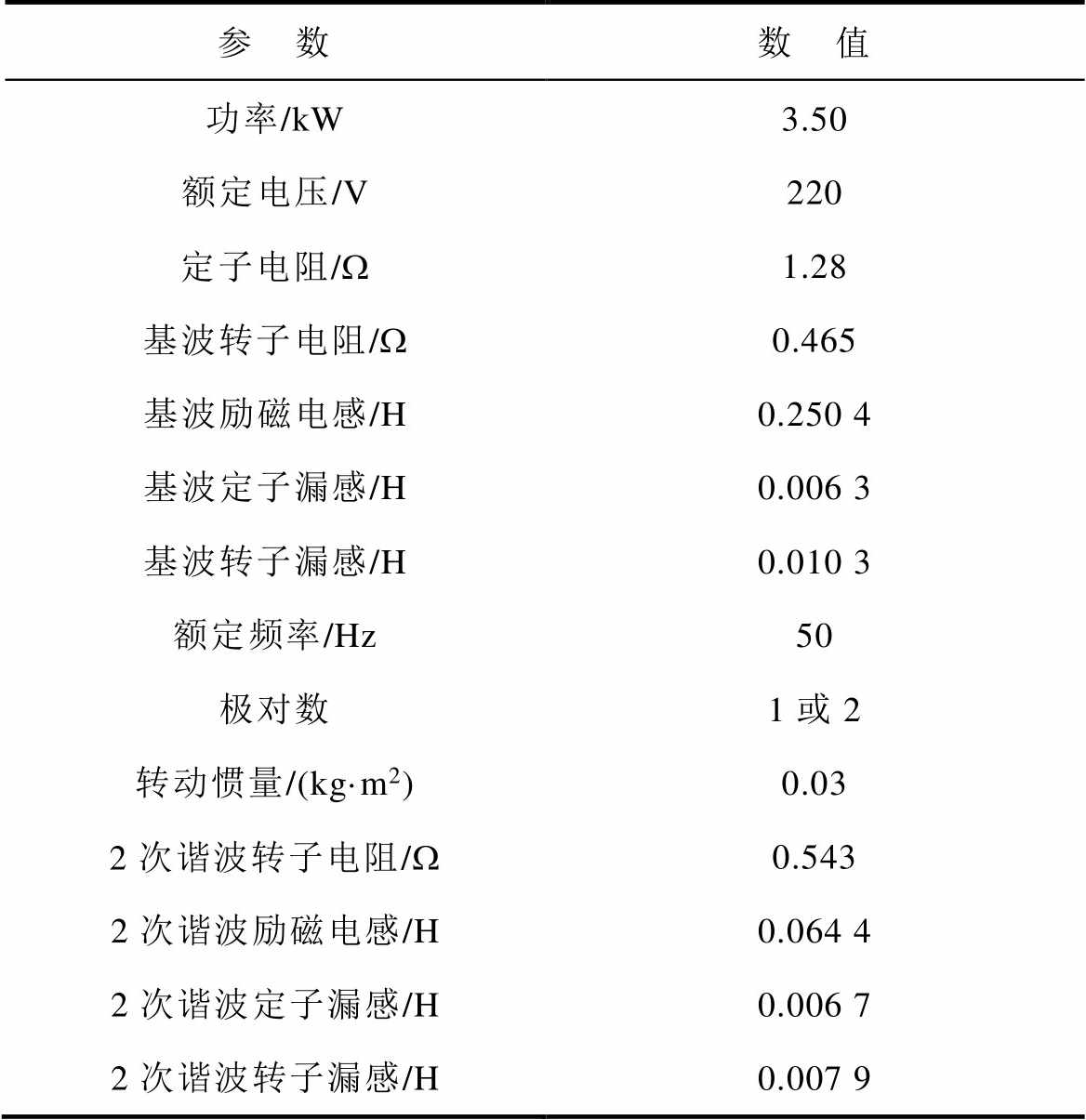
参 数数 值 功率/kW3.50 额定电压/V220 定子电阻/W1.28 基波转子电阻/W0.465 基波励磁电感/H0.250 4 基波定子漏感/H0.006 3 基波转子漏感/H0.010 3 额定频率/Hz50 极对数1或2 转动惯量/(kg·m2)0.03 2次谐波转子电阻/W0.543 2次谐波励磁电感/H0.064 4 2次谐波定子漏感/H0.006 7 2次谐波转子漏感/H0.007 9
对FIM分别给定额定磁链 、饱和磁链
、饱和磁链 、不饱和磁链
、不饱和磁链 ,负载10N·m做对比实验,不同转子磁链对FIM转矩电流和相电流的影响如图6所示。
,负载10N·m做对比实验,不同转子磁链对FIM转矩电流和相电流的影响如图6所示。
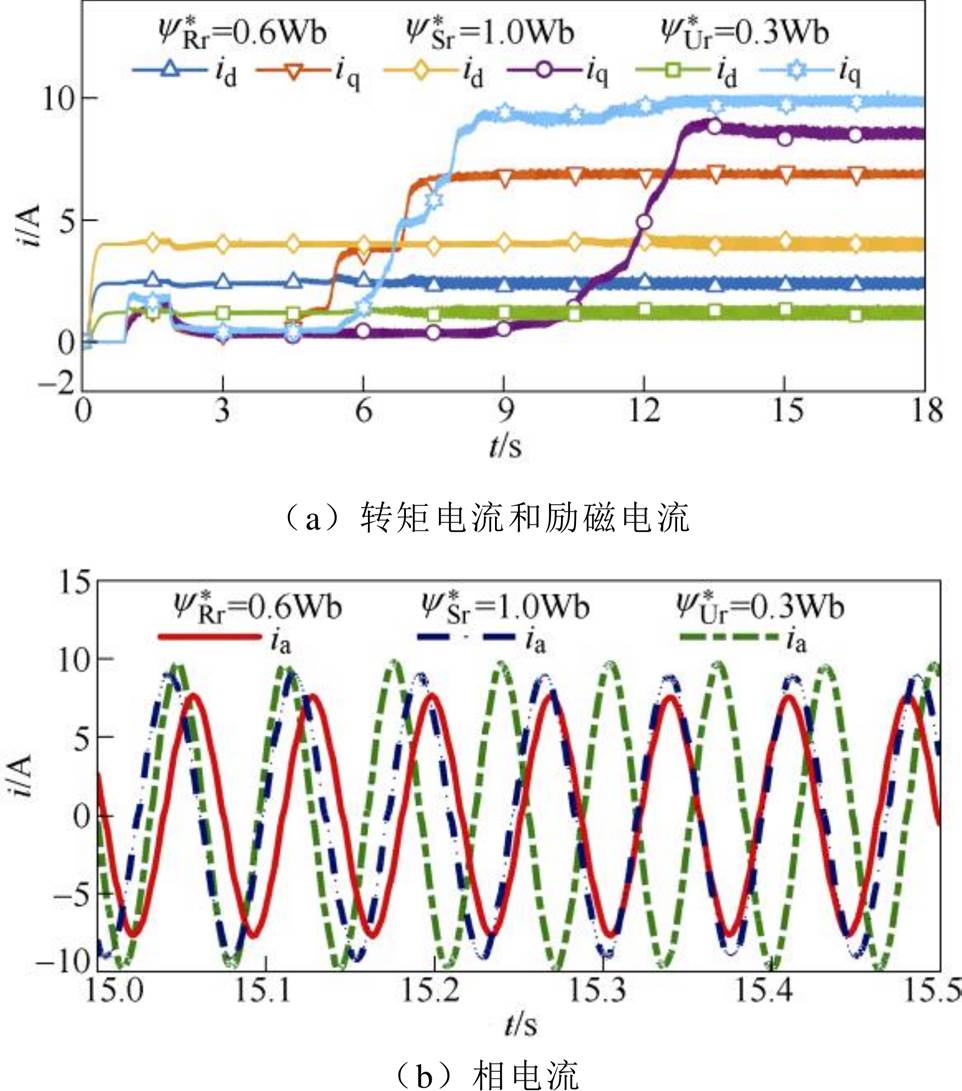
图6 不同转子磁链对FIM转矩电流和相电流的影响
Fig.6 The influence of different rotor flux on FIM torque current and phase current
由图6a可得,给定额定磁链=0.6Wb时,对应的转矩电流iq约7A,明显低于给定饱和磁链=1.0Wb的转矩电流iq的值8.8A和给定不饱和磁链=0.3Wb的转矩电流iq的值9.7A;由图6b可得,额定磁链时对应的相电流ia约为7.5A,明显低于给定饱和磁链=1.0Wb的相电流ia的值约9.4A和给定不饱和磁链=0.3Wb的相电流ia的值约10A,显然同等条件下,对FIM给定额定磁链时电机的转矩电流和相电流更小。该组实验数据说明,在电机负载运行时,转子磁链的大小对转矩电流比影响很大,进而影响电机效率,同时证明了RFO方法理论基础的正确性。
对FIM在1对极模式运行时,做采用和未采用RFO的对比实验。电机负载为15N·m,设定电机运行在基波1平面,第15s前给定基波1平面额定磁链 =0.6Wb运行,在第15s后叠加2次谐波2平面额定磁链
=0.6Wb运行,在第15s后叠加2次谐波2平面额定磁链 =0.3Wb,等效变极过程两个磁链叠加状态。实验结果如图7所示,
=0.3Wb,等效变极过程两个磁链叠加状态。实验结果如图7所示, 、
、 、
、 、
、 为采用RFO的数据,
为采用RFO的数据, 、i1d、i1q、i1a为未采用RFO的数据。
、i1d、i1q、i1a为未采用RFO的数据。
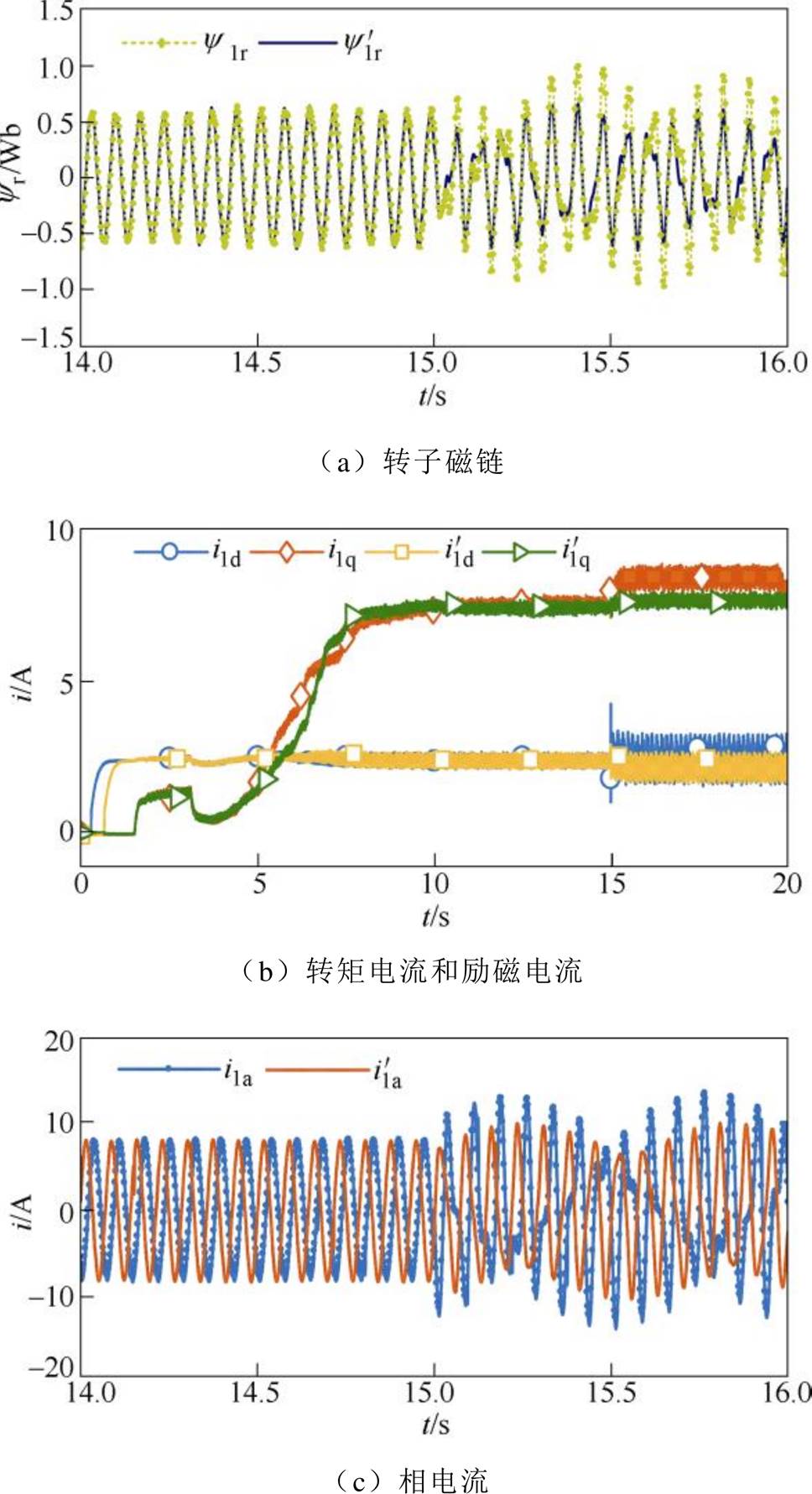
图7 1对极模式FIM采用和未采用RFO波形对比
Fig.7 The waveforms comparison with and without RFO of FIM in 1 pair of poles
由图7a可得,电机在基波1平面运行时,未采用RFO的最大约0.9Wb,最小约-0.9Wb,而采用RFO的最大约0.6Wb,最小约-0.6Wb,磁链波动明显减小,说明所提控制策略在1平面运行时可有效约束磁链。
由图7b可得,在两个转子磁链叠加的15~20s期间,波形较稳定且纹波小,而i1d数值变大且纹波大;与 相比,数值较小且纹波小;由图7c可得,的幅值最大约10A,i1a的幅值最大约13A,优化后的相电流幅值波动明显减小;该组实验数据说明在基波1平面运行时叠加2平面磁链,会导致电机转矩电流、相电流的波动变大,使电机运行不平稳和效率降低,而采用RFO控制可明显改善,说明所提控制策略对FIM在基波1平面即1对极运行时有效。
相比,数值较小且纹波小;由图7c可得,的幅值最大约10A,i1a的幅值最大约13A,优化后的相电流幅值波动明显减小;该组实验数据说明在基波1平面运行时叠加2平面磁链,会导致电机转矩电流、相电流的波动变大,使电机运行不平稳和效率降低,而采用RFO控制可明显改善,说明所提控制策略对FIM在基波1平面即1对极运行时有效。
对FIM在2对极模式运行时做采用和未采用RFO的对比实验。电机负载为15N·m,设定电机运行在2平面,在第15s前给定2平面额定磁链= 0.3Wb运行,在第15s后叠加1平面额定磁链=0.6Wb,等效变极过程两个磁链叠加状态。实验结果如图8所示, 、
、 、
、 、
、 为采用RFO的数据,
为采用RFO的数据, 、i2d、i2q、i2a为未采用RFO的数据。
、i2d、i2q、i2a为未采用RFO的数据。
由图8a可得,电机在谐波2平面运行时,未采用RFO的最大约0.9Wb,最小约-0.9Wb,而采用RFO的最大约0.6Wb,最小约-0.6Wb,磁链波动明显减小,说明所提控制策略在2平面运行时可有效约束磁链。
由图8b可得,在两个转子磁链叠加期间, 波形的数值较低且纹波小,而i2d波形的数值较大且纹波大;
波形的数值较低且纹波小,而i2d波形的数值较大且纹波大; 与i2q相比,数值较小且纹波小;由图8c可得,
与i2q相比,数值较小且纹波小;由图8c可得, 的幅值最大约10.5A,i2a的幅值最大约13.5A,优化后的相电流幅值波动明显减小;该组实验数据说明在谐波2平面运行时叠加基波磁链,同样会导致电机转矩电流和相电流的数值波动变大,使电机运行不平稳和效率降低,而采用RFO控制可明显改善,说明该控制策略对FIM在谐波2平面运行时有效。
的幅值最大约10.5A,i2a的幅值最大约13.5A,优化后的相电流幅值波动明显减小;该组实验数据说明在谐波2平面运行时叠加基波磁链,同样会导致电机转矩电流和相电流的数值波动变大,使电机运行不平稳和效率降低,而采用RFO控制可明显改善,说明该控制策略对FIM在谐波2平面运行时有效。
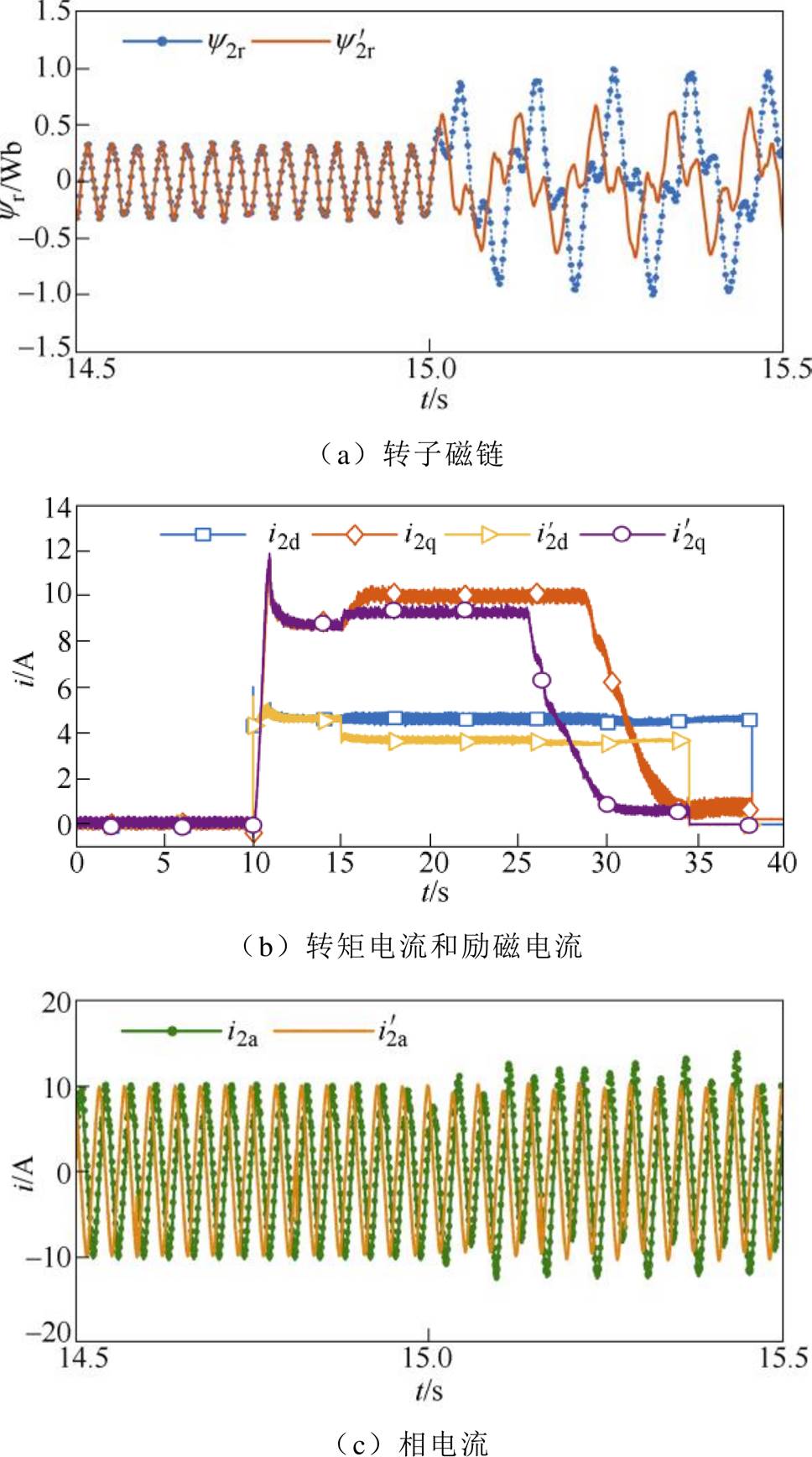
图8 2对极模式FIM采用和未采用RFO波形对比
Fig.8 The waveforms comparison with and without RFO of FIM in 2 pair of poles
基于指数响应转矩跟踪变极切换,对FIM做采用和未采用RFO控制的对比实验。本实验为从基波1平面1对极向2次谐波2平面2对极变极,电机负载为15N·m。实验结果如图9所示,对应转子磁链变化曲线、1平面和2平面的转矩电流变化曲线、相电流变化曲线、转速波动曲线和转矩波动曲线。图中,第15s前为基波1平面运行,第15~16s为变极过程,第16s后为谐波2平面运行, 、
、 、、
、、 、
、 、
、 为采用RFO控制策略的数据,
为采用RFO控制策略的数据, 、i1q、i2q、ia、n、
、i1q、i2q、ia、n、 为未采用RFO控制策略的数据。
为未采用RFO控制策略的数据。
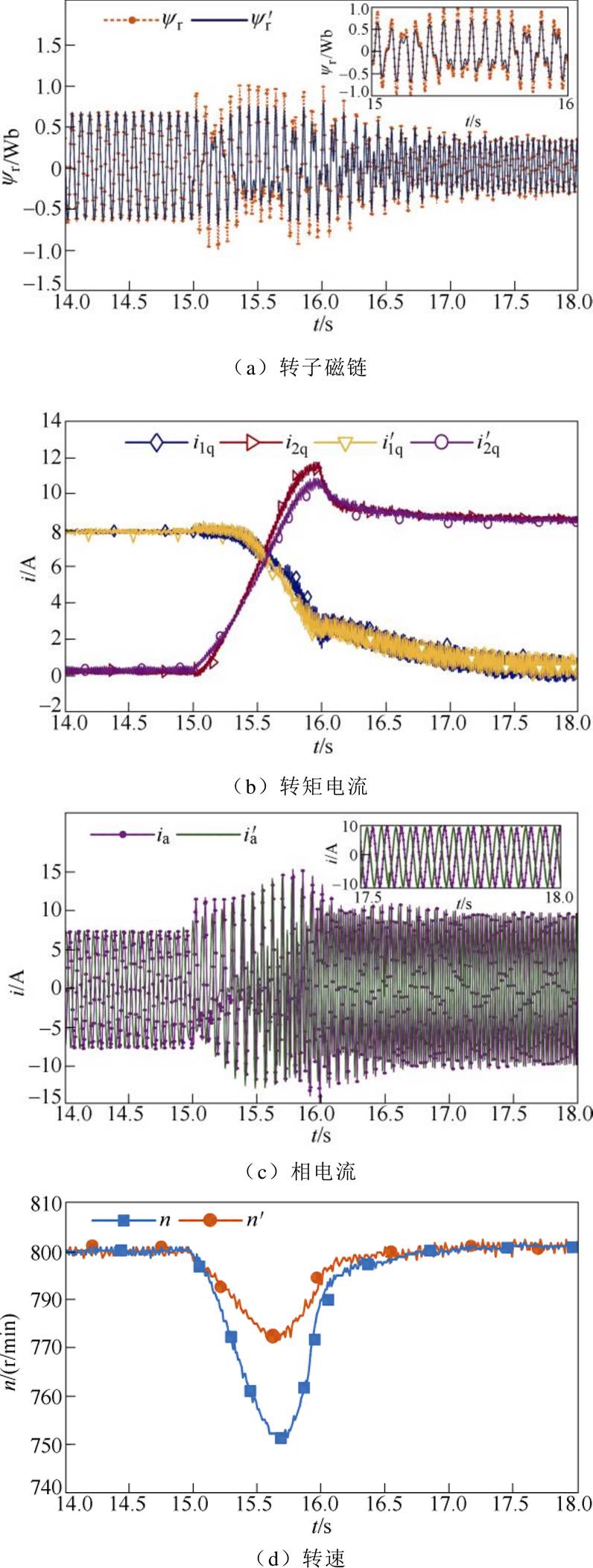
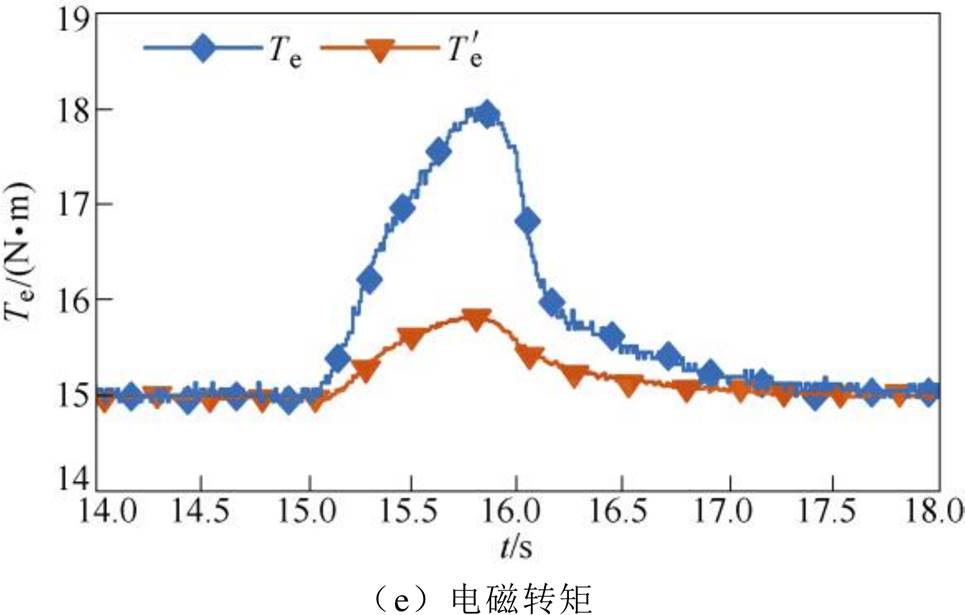
图9 电子变极时FIM采用和未采用RFO的波形对比
Fig.9 The waveforms comparison with and without RFO of FIM during electronic pole-changing
由图9a可得,变极过程中未采用RFO的最大约1Wb,最小约-1Wb,而采用RFO的最大约0.65Wb,最小约-0.65Wb,磁链波动明显减小,说明所提控制策略在变极过程中可有效约束转子 磁链。
由图9b可得,1平面转矩电流渐变为零,2平面转矩电流逐渐上升到稳定值,完成1对极向2对极的切换,在此期间与i1q、与i2q比较,采用RFO的波形、变化更平滑且波动小,其中转矩电流超调最大差值约有1.5A左右;由图9c可得,与 相比幅值波动明显变小,波动相差最大约有25%,的幅值波动小,说明采用RFO控制策略后转矩电流比降低的少;由图9d可见,与n相比,波动了约25r/min,而n波动了约50r/min,最大波动减小了约50%,波动明显变小和平缓;由图9e可得,与相比,波动了约1N·m,而波动了约3N·m,波动明显变小和平缓,最大波动减小了约67%;上述比较结果充分说明所提RFO的FIM电子变极控制策略能够有效提高变极过程中电机运行平稳性和转矩电流比。
相比幅值波动明显变小,波动相差最大约有25%,的幅值波动小,说明采用RFO控制策略后转矩电流比降低的少;由图9d可见,与n相比,波动了约25r/min,而n波动了约50r/min,最大波动减小了约50%,波动明显变小和平缓;由图9e可得,与相比,波动了约1N·m,而波动了约3N·m,波动明显变小和平缓,最大波动减小了约67%;上述比较结果充分说明所提RFO的FIM电子变极控制策略能够有效提高变极过程中电机运行平稳性和转矩电流比。
本文提出并分析了转子磁链饱和是导致FIM电子变极运行不平稳的主要原因之一。所设计的RFO电子变极控制策略有效地解决了变极过程中存在的磁链饱和问题,提高了电机变极切换时电机运行的平稳性。实验结果表明,所提策略在电子变极过程中能大幅降低转矩、转速和相电流的波动。另外,所提算法运算简便和结构归一化简洁表示,具有广泛的适用性和工程应用价值。本文的RFO控制策略为多相感应电机电子变极控制的设计和优化提供了一种便捷高效的新方法。
参考文献
[1] Liu Chunhua. Emerging electric machines and drives- an overview[J]. IEEE Transactions Energy Con- version, 2018, 33(4): 2270-2280.
[2] Zhao Nan, Schofield N A. Induction machine design with parameter optimization for a 120kW electric vehicle[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 592-601.
[3] 闫文举, 陈昊, 马小平, 等. 不同转子极数下磁场解耦型双定子开关磁阻电机的研究[J]. 电工技术学报, 2021, 36(14): 2945-2956.
Yan Wenju, Chen Hao, Ma Xiaoping, et al. Develop- ment and investigation on magnetic field decoupling double stator switched reluctance machine with different rotor pole numbers[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2945-2956.
[4] 卿龙, 王惠民, 葛兴来. 一种高效率开关磁阻电机转矩脉动抑制方法[J]. 电工技术学报, 2020, 35(9): 1912-1920.
Qing Long, Wang Huimin, Ge Xinglai. A high efficiency torque ripple suppression method for switched reluctance motor[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1912-1920.
[5] EL-Refaie A M, Osama M. High specific power electrical machines: a system perspective[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(1): 88-93.
[6] Li Kaibo, Bouscayrol A, Cui Shumei, et al. A hybrid modular cascade machines system for electric vehicles using induction machine and permanent magnet synchronous machine[J]. IEEE Transactions on Vehicular Technology, 2021, 70(1): 273-281.
[7] Baloch N, Atiq S, Kwon B A. Wound-field pole- changing vernier machine for electric vehicles[J]. IEEE Access, 2020, 8: 91865-91875.
[8] 葛晓琳, 郝广东, 夏澍, 等. 考虑规模化电动汽车与风电接入的随机解耦协同调度[J]. 电力系统自动化, 2020, 44(4): 54-62.
Ge Xiaolin, Hao Guangdong, Xia Shu, et al. Stochastic decoupling collaborative dispatch con- sidering integration of large-scale electric vehicles and wind power[J]. Automation of Electric Power Systems, 2020, 44(4): 54-62.
[9] 宋雨浓, 林舜江, 唐智强, 等. 基于动态车流的电动汽车充电负荷时空分布概率建模[J]. 电力系统自动化, 2020, 44(23): 47-62.
Song Yunong, Lin Shunjiang, Tang Zhiqiang, et al. Spatial temporal distribution probabilistic modeling of electric vehicle charging load based on dynamic traffic flow[J]. Automation of Electric Power Systems, 2020, 44(23): 47-62.
[10] Nøland J K, Leandro M, Suul J A, et al. High-power machines and starter-generator topologies for more electric aircraft: a technology outlook[J]. IEEE Access, 2020, 8: 130104-130123.
[11] Barrero F, Duran M J. Recent advances in the design, modeling, and control of multiphase machines-part I[J]. IEEE Transactions on Industrial Electronics, 2016, 63(1): 449-458.
[12] Osama M, Lipo T A. Modeling and analysis of a wide-speed-range induction motor drive based on elecmnic pole changing[J]. IEEE Transactions on Industry Applications, 1997, 33(5): 1177-3184.
[13] Ge Baoming, Sun Dongsen, Wu Weiliang, et al. Winding design, modeling, and control for pole-phase modulation induction motors[J]. IEEE Transactions on Magnetics, 2013, 49(2): 898-911.
[14] 杨家强, 高健, 黄进. 多相感应电机指数响应电子变极方法研究[J]. 中国电机工程学报, 2013, 33(27): 105-111.
Yang Jiaqiang, Gao Jian, Huang Jin. Electronic pole- changing methods of multiphase induction motor based on exponent response[J]. Proceedings of the CSEE, 2013, 33(27): 105-111.
[15] Yang Jiaqiang, Yin Rongsen, Zhang Xiaojun, et al. Exponential response electrical pole-changing method for a five-phase induction machine with a current sliding mode control strategy[J]. Frontiers of Infor- mation Technology & Electronic Engineering, 2017, 18(8): 1151-1167.
[16] 尹溶森, 杨磊, 杨家强, 等. 五相感应电机转矩跟踪电子变极方法[J]. 电机与控制学报, 2015, 19(1): 1-7.
Yin Rongsen, Yang Lei, Yang Jiaqiang, et al. Elec- tronic pole-changing methods of five-phase induction machine based on torque tracking[J]. Electric Machines and Control, 2015, 19(1): 1-7.
[17] Ershad N F, Mirsalim M, Aliabad A D. Line-start permanent magnet motors: proper design for pole- changing starting method[J]. IET Electric Power Applications, 2013, 7(6): 470-476.
[18] Tian Mengmeng, Wang Xiuhe, Wang Daohan, et al. A novel line-start permanent magnet synchronous motor with 6/8 pole changing stator winding[J]. IEEE Transactions on Energy Conversion, 2018, 33(3): 1164-1174.
[19] Umesh B S, Sivakumar K. Pole-phase modulated multiphase IM drive with reduced torque ripple and improved DC link utilization[J]. IEEE Transactions on Power Electronics, 2017, 32(10): 7862-7869.
[20] Reddy B P, Keerthipati S A. Multilevel inverter configuration for an open-end-winding pole-phase- modulated-multiphase induction motor drive using dual inverter principle[J]. IEEE Transactions on Industrial Electronics, 2018, 65(4): 3035-3044.
[21] Libbos E, Ku B, Agrawal S, et al. Loss minimization and maximum torque-per-ampere operation for variable-pole induction machines[J]. IEEE Transa- ctions on Transportation Electrification, 2020, 6(3): 1051-1064.
[22] Latif T, Jaffar M Z M, Husain I. Modeling and control of a 4-pole/8-pole induction motor for smooth torque production during electronic pole changing[C]//IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 2020: 2052-2057.
[23] Mallampalli S, Zhu Z Q, Mipo J C, et al. 48V starter-generator induction machine with pole- changing windings[J]. IEEE Transactions on Industry Applications, 2020, 56(6): 6324-6337.
[24] Mallampalli S, Zhu Z Q, Mipo J C, et al. Six-phase pole-changing winding induction machines with improved performance[J]. IEEE Transactions on Energy Conversion, 2021, 33(3): 534-546.
[25] Reddy B P, Rao A M, Sahoo M, et al. A fault-tolerant multilevel inverter for improving the performance of a pole-phase modulated nine-phase induction motor drive[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1107-1116.
[26] Reddy B P, Keerthipati S. Linear modulation range and torque ripple profile improvement of PPMIM drives[J]. IEEE Transactions on Power Electronics, 2019, 34(12): 12120-12127.
[27] Reddy B P, Keerthipati S. Multilayer fractional slot pole-phase modulated induction motor drives for traction applications[J]. IEEE Transactions on Industrial Electronics, 2020, 67(11): 9112-9119.
[28] Lee J S, Choi G. Modeling and hardware-in-the-loop system realization of electric machine drives-a review[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(3): 194-201.
[29] 刘璐, 杜旭东, 王晓年. 考虑磁饱和的感应电机MTPA转矩控制[J]. 电工技术学报, 2017, 32(23): 42-50.
Liu Lu, Du Xudong, Wang Xiaonian. MTPA torque control of induction motor considering magnetic saturation[J]. Transactions of China Electrotechnical Society, 2017, 32(23): 42-50.
[30] Bozhko S, Dymko S, Kovbasa S, et al. Maximum torque-per-amp control for traction IM drives: theory and experimental results[J]. IEEE Transactions on Industry Applications, 2017, 53(1): 181-193.
[31] Wang Bo, Zhang Jing, Yu Yong, et al. Unified complex vector field-weakening control for induction motorhigh-speed drives[J]. IEEE Transactions on Power Electronics, 2021, 36(6): 7000-7011.
[32] 程明, 文宏辉, 曾煜, 等. 电机气隙磁场调制行为及其转矩分析[J]. 电工技术学报, 2020, 35(5): 921- 930.
Cheng Ming, Wen Honghui, Zeng Yu, et al. Analysis of airgap field modulation behavior and torque component in electric machines[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 921- 930.
[33] 孟繁庆, 易新强, 刘海涛, 等. 三次谐波注入下多相感应电机稳态性能分析[J]. 电工技术学报, 2020, 35(16): 3396-3405.
Meng Fanqing, Yi Xinqiang, Liu Haitao, et al. Steady-state performance analysis of multiphase induction motor with third-order harmonic injection[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3396-3405.
[34] 王明杰, 徐伟, 杨存祥, 等. 基于精确子域模型的永磁直线同步电机空载磁场解析计算[J]. 电工技术学报, 2020, 35(5): 942-953.
Wang Mingjie, Xu Wei, Yang Cunxiang, et al. Analytical calculation of no-load magnetic field in permanent magnet linear synchronous motors based on an accurate subdomain model[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 942-953.
[35] Levi E, Sokola M, Vukosavic S N. A method for magnetizing curve identification in rotor flux oriented induction machines[J]. IEEE Transactions on Energy Conversion, 2000, 15(2): 157-162.
Electronic Pole-Changing Strategy for Five-Phase Induction Motor Based on Rotor Flux Optimization
Abstract The electronic pole-changing with exponential response torque tracking of five-phase induction motor (FIM) suffers from the problem of unsmooth operation. The analysis shows that that the rotor flux saturation is one of the main reasons. Therefore, a rotor flux optimization (RFO) electronic pole- changing control strategy is proposed considering the flux saturation. The superposition of the rotor flux of two control planes during the process of electronic pole-changing is the cause of flux saturation. The control function of the rotor flux is thus designed by the constraint functions of flux amplitude and electromagnetic torque to make the rotor flux approach the critical value, which optimizes the rotor flux control. Based on the Speedgoat hardware in the loop experimental platform of FIM, the proposed RFO method is verified through an experiment, and the electronic pole-changing control strategies of exponential response torque tracking with and without RFO are compared. The experimental results show that the proposed strategy reduces the speed fluctuation by 50% and the torque fluctuation by 67%, which effectively improves the smoothness of the motor during electronic pole-changing process.
keywords:Five phase induction motor (FIM), electronic pole-changing, magnetic saturation, constraint function, rotor flux optimization (RFO)
DOI: 10.19595/j.cnki.1000-6753.tces.210843
中图分类号:TM346
浙江省自然科学基金项目(LCZ19E070001)、安徽省高校优秀青年人才支持计划重点项目(gxyqZD2021150)、校级项目_学术技术带头人(060200210004)、安徽省高校自然科学研究重点项目(KJ2020A0909)和国家自然科学基金项目(51777191)资助。
收稿日期 2021-06-14
改稿日期 2021-11-03
贾慧利 女,1981年生,硕士,副教授,研究方向为多相感应电机驱动系统及其控制。E-mail: jiahuili66@126.com
杨家强 男,1970年生,教授,博士生导师,主要研究方向为电机控制和驱动技术。E-mail: yjq1998@163.com(通信作者)
(编辑 崔文静)