图1 WPT电动汽车V2G模式下的光储直流微网系统
Fig.1 DC microgrid with PV, energy storage and EV-WPT in V2G mode
摘要 随着电动汽车数量与负荷的激增,构建实现低碳、灵活、稳定的电动汽车充电方式至关重要。该文融合直流微电网以及无线电能传输、车网互联(V2G)等技术,重点研究无线充电电动汽车V2G模式下光储直流微电网能量管理策略。分别建立光伏、无线充电电动汽车、网侧储能数学模型。考虑光伏出功与负载状态,推导无线充电电动汽车最优效率馈网的临界条件,给出超出临界点后网侧储能的出力函数。基于此,定义直流微电网三种运行模式及其边界条件,设计上层控制器实现三种模式间的切换。搭建实验系统,验证不同负荷下所提出的分层控制算法可有效维持母线电压稳定,并且保持光伏系统的最大功率与无线电能传输系统的最优效率运行。
关键词:直流微电网 光伏 无线电能传输 车网互联 电动汽车
近年来,在“双碳”目标的政策引领下,我国电动汽车(Electric Vehicle, EV)产业取得长足发展,大力普及新能源汽车已经成为我国的既定方针和未来趋势。然而随着EV数量与充电负荷的爆发性增长,如何实现低碳、灵活、稳定的EV充电成为当今研究的热点。
在电网构架方面,现有EV充电主要依赖传统电网,该方式存在以下两点问题:①EV快速充电的负荷冲击性以及时间-空间无序性给电网调峰调频带来巨大挑战;②我国当前的发电结构仍然以火电为主,新增的EV负荷会加剧使用化石能源导致的碳排放问题。因此,一种将EV充电桩与分布式可再生能源有机结合的光储直流微电网应运而生[1-4],有助于可再生能源的就地消耗,降低EV对大电网的依赖。
在车-网能量交互方面,为进一步平抑用电高峰和低谷期的电网波动,车网互联(Vehicle to Grid, V2G)技术被引入电网[5-9],将EV作为储能设备参与到电网的能量管理中,从而实现削峰填谷的作用。因此,基于光储直流微电网和V2G技术的EV与电网的交互模式具有诸多优势。
在车-网电气接口方面,目前常见的基于充电桩的有线接口在频繁插拔后容易出现接口磨损氧化、局部过热以及漏电等安全隐患。无线电能传输(Wireless Power Transfer, WPT)技术作为一种新兴供电模式,从根本上消除了电气接口的物理接触,具有灵活便捷、安全可靠等优势[10-17],是车-网电气接口的优选方案。
围绕基于直流微电网和WPT技术的EV充电,现有研究主要呈现两大特征:①微电网侧和EV-WPT侧相互独立;②仅针对EV-WPT系统的正向充电工况展开研究。文献[18]提出了采用光储组合系统为WPT电动汽车充电的微网系统,该系统可在提高充电灵活性的同时,有效解决电动汽车对电网产生的冲击。文献[19]研究了含无线充电路面的移动微网优化运行策略,通过无线充电路面实现节点间的功率转移,太阳能消纳量可提高20%。文献[20]针对无线充电系统特性以及电网特性,提出了将二者结合的微电网能量链路优化方法。文献[21]将无线充电电动汽车融入风光互补的微电网中,文中着重于微电网的上层控制器设计,建立了微电网的分层控制策略。文献[22]针对含有动态无线充电的直流微电网,基于Simulink优化工具包对系统的容量进行了优化配置,仿真结果表明优化后的系统可以在保证电动汽车充电功率需求下充分利用可再生能源。文献[23]提出一种由光伏电池供电的无线充电系统,该系统实现了在不同的光照环境下维持直流母线的电压稳定。总之,现有研究主要围绕结合直流微电网的EV无线充电过程,但是EV作为分布式储能单元,基于WPT技术的V2G模式下的光储直流微电网的能量管理问题也亟待研究。
本文以孤岛运行的光储直流微电网为研究对象,重点探究因光伏(Photovoltaic, PV)发电与网侧储能不足而无法满足电网负荷需求时,无线充电电动汽车V2G模式下的光储直流微电网能量管理策略。在确保PV最大功率运行、WPT系统最优效率馈能的前提下,填补电网功率缺额,实现母线电压稳定。最后搭建实验系统,在不同电网负载条件下,验证了所提策略的正确性与有效性。
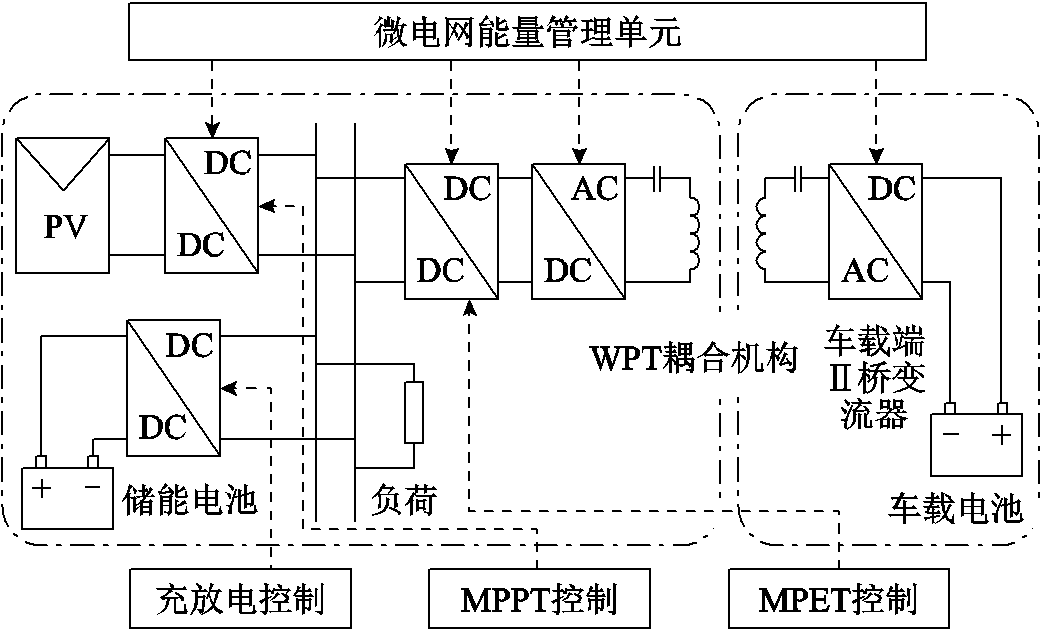
本文所研究的无线充电电动汽车V2G模式下的光储直流微电网如图1所示。
图1 WPT电动汽车V2G模式下的光储直流微网系统
Fig.1 DC microgrid with PV, energy storage and EV-WPT in V2G mode
微网系统由网侧储能、PV电池以及工作于V2G模式的EV-WPT系统组成。其中EV-WPT系统网侧级联双向Buck-Boost变换器以实现系统V2G模式最大效率追踪(Maximum Power Efficiency Tracking, MPET);PV电池级联Buck-Boost变换器实现在不同辐照强度及温度下的最大功率点跟踪(Maximum Power Point Tracking, MPPT);网侧储能级联双向DC-DC单元与EV-WPT系统DC-AC模块共同实现母线电压控制。除底层MPET、MPPT和母线电压控制外,系统设置有上层能量管理单元,依据负荷功率、PV最大功率等信息切换微电网工作模式,以保障各单元的合理运行和母线电压稳定。
由于光伏电池的I-V曲线具有非线性,为确保不同辐照强度与温度条件下PV系统输出最大功率Pm,本文采用四管Buck-Boost变换器进行MPPT控制[24-25]。光伏系统拓扑如图2所示。该拓扑具有输入输出同极性、输入电压范围宽、双向均可升降压和开关管应力小等优点,故在本文中被应用于PV系统以及EV-WPT系统。变换器驱动信号Q1与Q4、Q2与Q3分别对应相同,上下两桥臂开关交替导通,控制占空比α与变流器电压增益关系为
 (1)
(1)

图2 光伏系统
Fig.2 Photovoltaic system
V2G模式下EV-WPT系统电路如图3所示,系统采用串联补偿拓扑,该拓扑具有恒流输出特性,并网后不会带来环流问题[26]。其中Rp、Rs分别为两侧回路内阻,Cp、Cs为补偿电容,分别与线圈自感谐振。双向Buck-Boost实现WPT的最优效率跟踪,车载H桥变流器采用移相控制实现直流母线电压稳定。
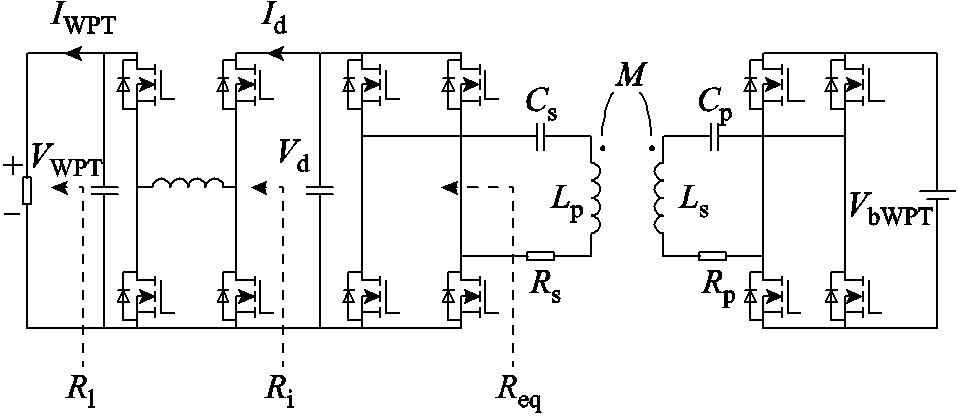
图3 V2G模式下EV-WPT系统
Fig.3 EV-WPT system in V2G mode
图3中,Rl为网侧等效阻抗,Vd、Id分别为地面端H桥变流器直流侧电压、电流, 为车载电池电压。当仅有光伏电池与EV-WPT系统工作时,则网侧等效阻抗Rl可表示为
为车载电池电压。当仅有光伏电池与EV-WPT系统工作时,则网侧等效阻抗Rl可表示为
 (2)
(2)式中,RL为微电网负载等效电阻;Vbus为母线电压;PPV为PV系统MPPT时的输出功率。
由控制双向DC-DC变换器占空比为β,可以得到DC-DC变换器电压增益,进而系统网侧等效负载阻抗折算到地面端H桥变流器直流侧为
 (3)
(3)进一步折算到地面端H桥变流器交流侧为
 (4)
(4)
EV-WPT系统在充电模式与放电模式下的等效电路一致,如图4所示。
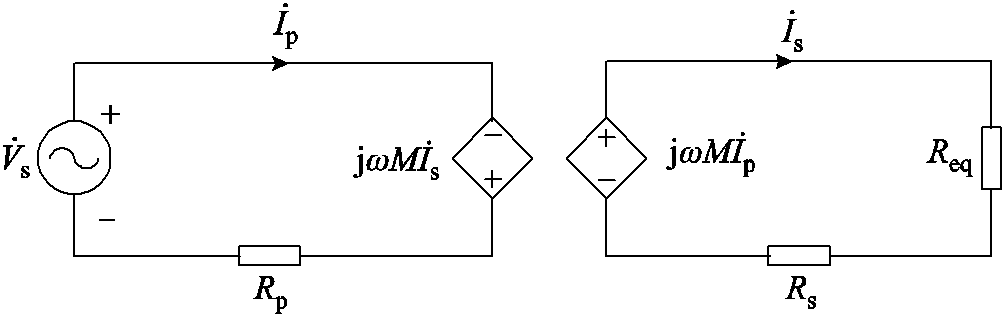
图4 EV-WPT系统等效电路
Fig.4 Equivalent circuit of EV-WPT system
列写等效电路的KVL方程为
 (5)
(5) (6)
(6)
联立式(5)和式(6)求解电流 、
、 ,则系统效率为
,则系统效率为
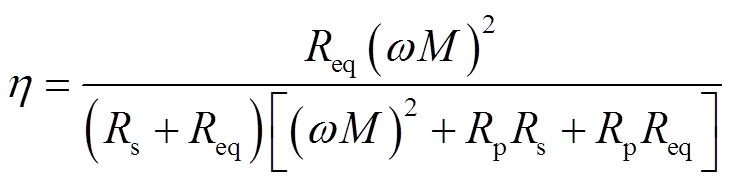 (7)
(7)该效率表达式适用于充电模式与放电模式。令dη/dReq=0,系统最优效率对应的等效负载为
 (8)
(8)
由于线圈内阻极小,即(ωM)2 RpRs,当一次、二次侧匝数相近时,可假设Rp≈Rs。因此,最优负载近似为
RpRs,当一次、二次侧匝数相近时,可假设Rp≈Rs。因此,最优负载近似为
 (9)
(9)由式(2)~式(4)和式(9)可得,EV-WPT系统最优效率所对应的占空比β应满足
 (10)
(10)
由于DC-DC占空比存在0<β<1的约束,对于上界,令 ,此时PV出功刚好满足负载需求,有
,此时PV出功刚好满足负载需求,有
 (11)
(11)对于β的下界,由于EV-WPT系统车载端H桥变流器采用移相控制,因此存在最大出力约束,即移相值为0时输出电流达最大值。此时,当等效负载为最优负载的条件下系统输出电流为
 (12)
(12)
此外,由于DC-DC变换器输入输出电流关系为
 (13)
(13)令Id≤Idmax,得到变换器占空比的约束条件为
 (14)
(14)
结合式(10)和式(14),以及0<β<1的取值范围,得到EV-WPT控制占空比D与微电网的源-荷关系如图5所示。联立曲面βlimit(PPV, RL)及β(PPV, RL),可知二者相交于一个曲线,该曲线在xy面上的投影PPV(RL)为
 (15)
(15)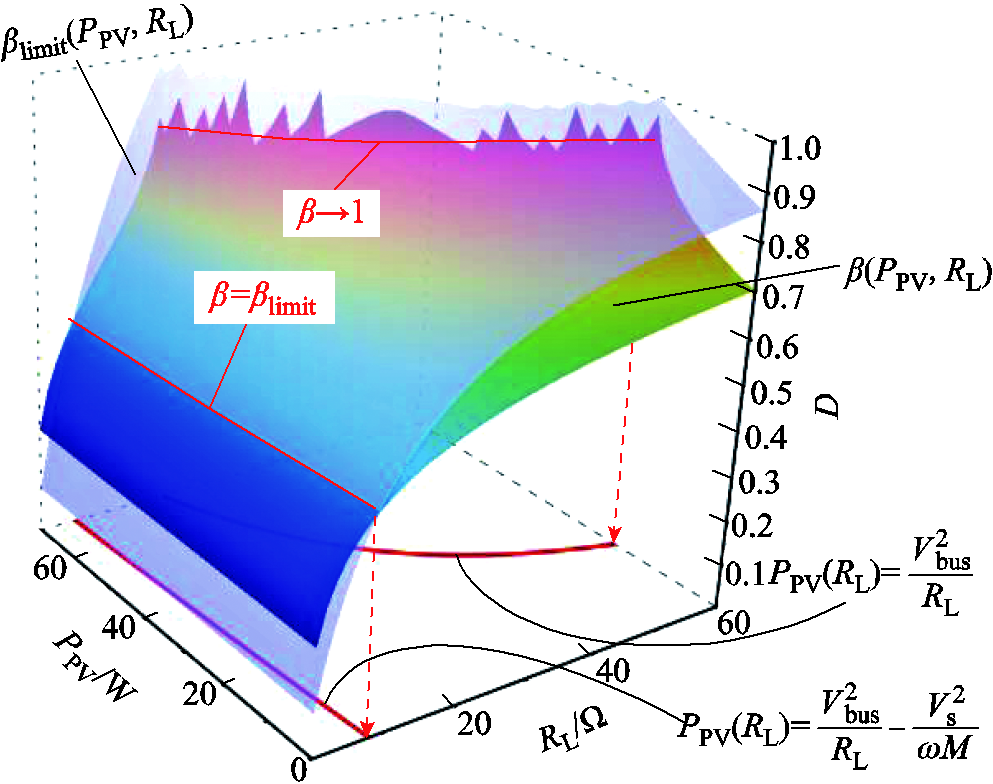
图5 EV-WPT系统与光伏电池工作时β的约束曲线
Fig.5 Constraint curves of the duty cycle β when the EV-WPT system and PV work
由图5及式(15)可知,EV-WPT系统出力受DC-DC变换器占空比限制,存在两个边界:当电网负载RL过小而PV出功充足时,DC-DC变换器占空比接近1,此时EV退出V2G模式,转入充电模式;当负载过大而PV出功不足时,即(PPV, RL)位于曲线左侧时,EV-WPT系统的最优效率与母线电压两个控制目标产生矛盾,此时为保证EV-WPT系统的高效运行,微网系统将启用网侧储能填补功率缺额,下节讨论网侧储能模型。
基于半桥式双向DC-DC变换器的网侧储能电路如图6所示。
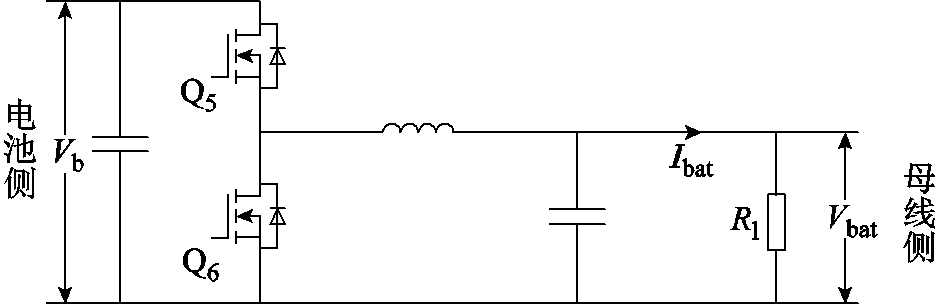
图6 网侧储能系统电路
Fig.6 Circuit of grid-side energy storage system
由KCL定律可知,在保持母线电压恒定的前提下,PV、EV-WPT及网侧储能三者协同时网侧储能输出电流Ibat应满足
 (16)
(16)式中,IWPT为EV-WPT系统全出力状态下的输出电流。母线电压由网侧储能电路进行控制,因此
 (17)
(17)
由式(9)的最大效率表达式可得
 (18)
(18)联立式(17)和式(18)解出β与IWPT并代入式(16),可解得PV电池-WPT-网侧储能协同运行下,网侧储能的出力函数Ibat (PPV, RL)如图7所示。
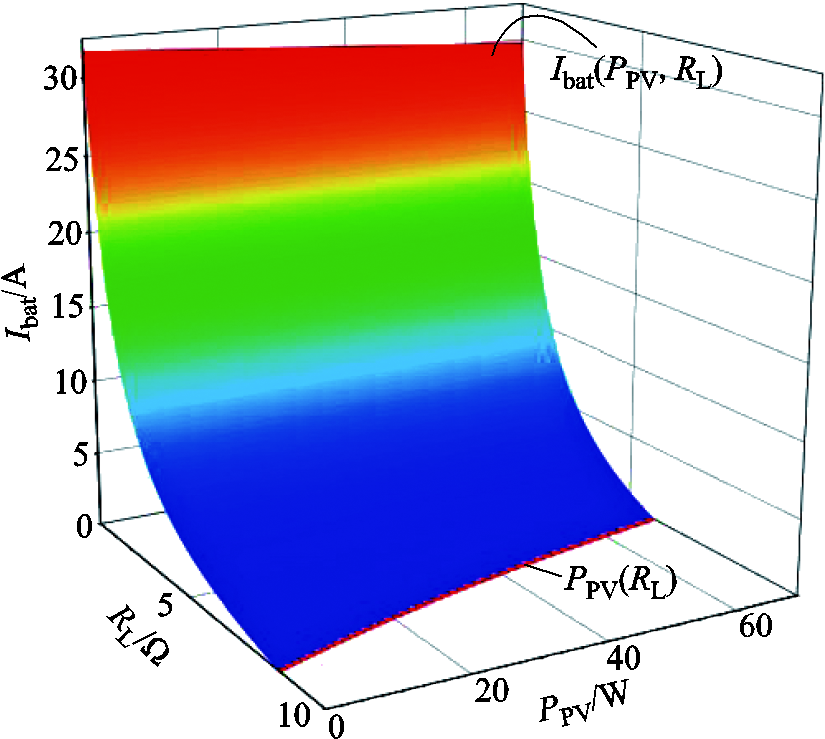
图7 网侧储能输出电流与PV出力、电网负载关系
Fig.7 Relationship between output current of the grid-side energy storage against photovoltaic power and load
为实现孤岛微电网能量利用效率的最大化,即PV电池的MPPT与EV-WPT系统MPET,本文提出能量梯次利用的三种运行模式,如图8所示。
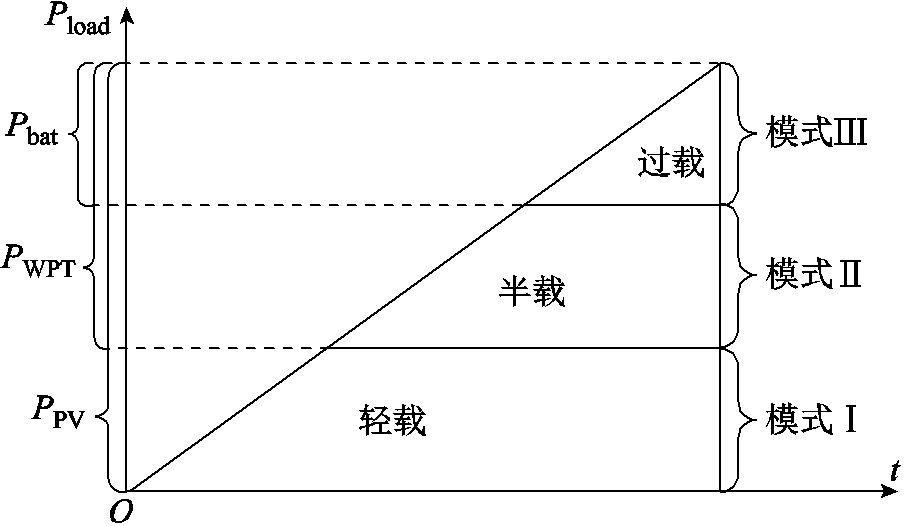
图8 直流微电网模式划分
Fig.8 Mode division of DC microgrid
图8中,纵坐标表示不同负荷功率需求,根据功率需求的大小将微网系统分为三种不同运行模式。
模式Ⅰ:仅PV系统出功。此时负载功率较低,网侧储能及EV作为负荷进行充电。若所有负荷仍无法消纳PV系统工作于MPPT下的输出功率,则PV系统采取恒压控制,该模式不属于本文范畴。
模式Ⅱ:工作于MPPT下的PV系统与工作于V2G模式下的EV-WPT系统协同出力。PV系统提供基础功率,剩余的功率缺额由工作于MPET下的EV-WPT系统馈网填补。同时,母线电压由EV-WPT车载端H桥变流器移相调节进行控制。
模式Ⅲ:PV、工作于V2G模式下的EV-WPT、网侧储能协同出力。此时负荷功率较大,为保证运行于MPET模式,仅依靠EV-WPT系统无法填补功率缺额,因此投入网侧储能填补功率缺额,同时参与维持母线电压稳定。
微电网系统的整体控制策略如图9所示。图9中,δ为WPT系统车载端H桥变流器移相角,γ为网侧储能DC-DC占空比。控制系统由两层控制结构组成,底层控制由各变换器的控制单元实现,负责达成MPPT、MPET和母线稳压等控制目标;上层控制则作为系统的能量管理单元,负责处理采集电气信息,计算系统运行状态并决策运行模式,最后向下层控制器发出动作指令。
上层能量管理单元控制流程如图10所示,各单元动作判据基于微电网系统的功率缺额Pvac,即
 (19)
(19)式中,η为光伏DC-DC变换器的效率;VbusIL为负荷所需功率;VPVIPV为工作于MPPT下的PV输出功率。
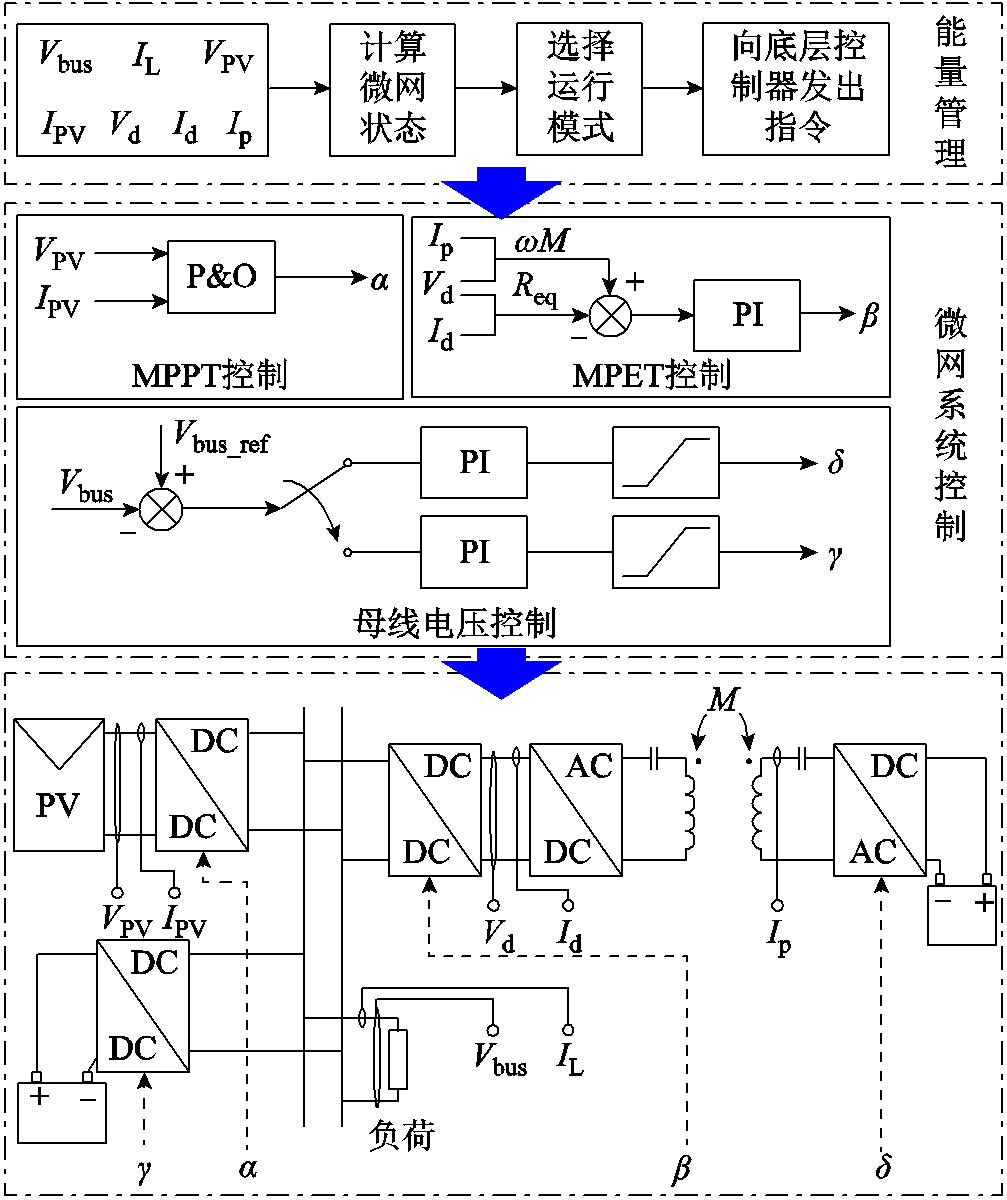
图9 系统整体控制策略
Fig.9 Control strategy diagram of the proposed system
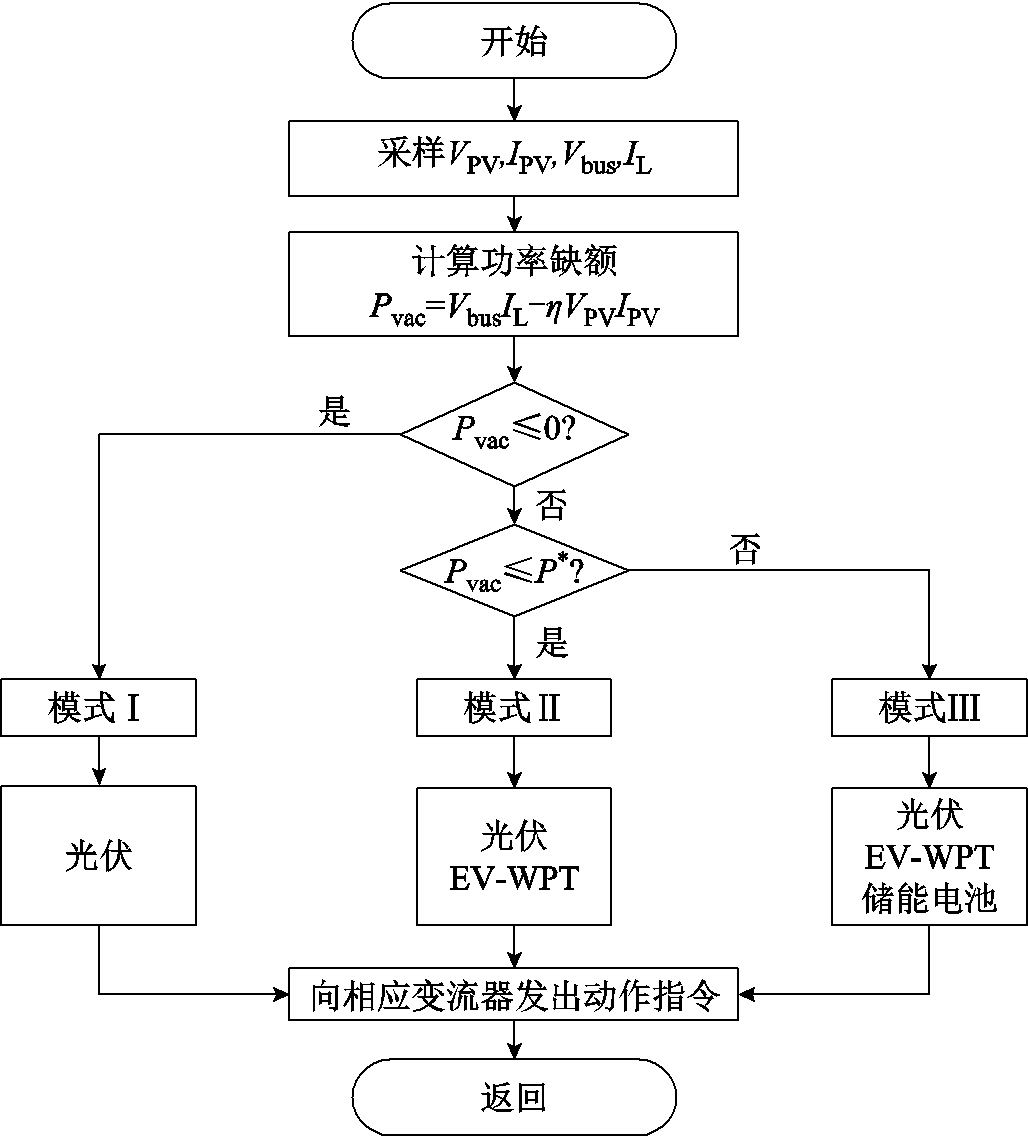
图10 上层能量管理单元控制流程
Fig.10 Control flow chart of the power management unit
由式(14)及当前PPV可计算出β=βlimit时对应的临界等效负载为 ,则功率缺额的临界值P*为
,则功率缺额的临界值P*为
 (20)
(20)当Pvac≤0时,PV电池可以满足负荷需求,EV及网侧储能无需出力,即系统工作在模式Ⅰ;当0<Pvac≤P*,此时工作于MPET下的EV-WPT系统可填补负荷缺额功率,即系统工作在模式Ⅱ;当Pvac>P*,此时EV-WPT系统无法在最优效率传输的同时维持母线电压稳定,剩余的功率缺额由网侧储能填补,即系统工作在模式Ⅲ。
为实现PV系统MPPT控制,由于光伏电池P-V曲线为单极值函数,本文采用扰动观察算法,通过不断扰动DC-DC占空比β实现最大功率跟踪。
EV-WPT系统的MPET控制算法框图如图11所示。首先通过检测整流器输出电压、电流,计算等效负载Ri,将经过比例环节得到交流测等效负载Req。根据二次侧直流电压计算推出二次侧线圈电压有效值,根据式(9)可计算出互感抗ωM。
 (21)
(21)
图11 EV-WPT系统MPET控制框图
Fig.11 MPET control diagram of EV-WPT system
最后将ωM与Req的误差进行PI运算,运算结果输出为DC-DC占空比,从而进行实时MPET控制。
本系统采用的母线电压控制有两种,控制器的投入与否由能量管理单元的模式选择器根据系统状态使能,母线电压稳定控制框图如图12所示。模式Ⅱ中电压控制由EV-WPT系统车载端H桥变流器执行,利用PI运算实现电压与设定值的无差跟踪,将运算结果输出为移相角δ指令;模式Ⅲ中,电压控制由网侧储能DC-DC变换器,采用PI控制实现电压稳定。
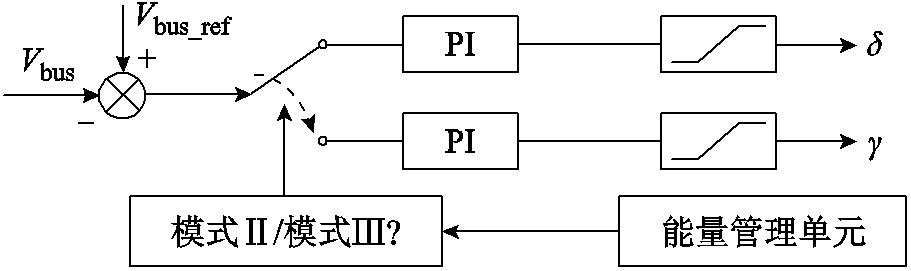
图12 母线电压稳定控制框图
Fig.12 Bus voltage control diagram
为验证所提出的无线充电电动汽车V2G模式下光储直流微电网能量管理策略的正确性,搭建直流微电网实验系统如图13所示,针对系统在各运行模式的稳态及动态切换进行实验验证。

图13 实验系统
Fig.13 Experimental system
实验系统主要由三部分组成:工作于V2G模式的EV-WPT系统、PV系统、网侧储能系统,每个子系统由相应的变换器进行电能变换以及目标控制。光伏电池由PVS1001-300V10A光伏模拟电源模拟,车载电池以及网侧储能单元均由直流电压源模拟,直流微电网负载由电子负载模拟。控制器基于STM32F103ZET6搭建。实验系统中EV-WPT系统和光伏模拟器的主要参数见表1和表2。
表1 EV-WPT系统参数
Tab.1 Parameters of EV-WPT system
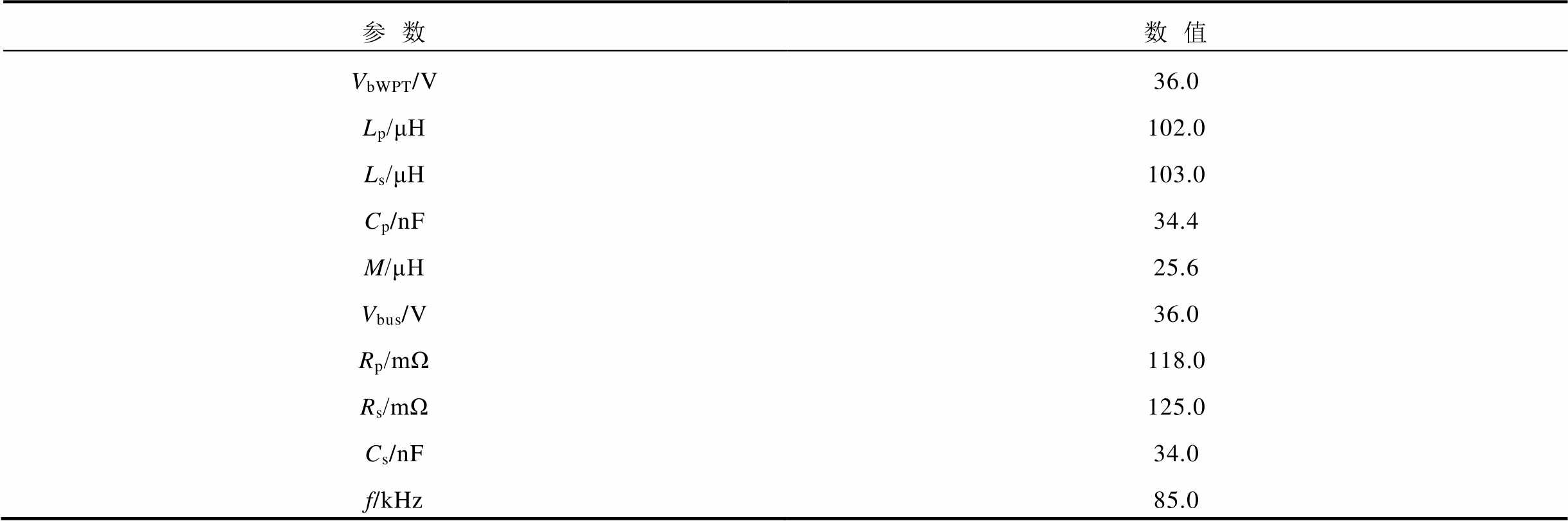
参数数值 VbWPT/V36.0 Lp/μH102.0 Ls/μH103.0 Cp/nF34.4 M/μH25.6 Vbus/V36.0 Rp/mΩ118.0 Rs/mΩ125.0 Cs/nF34.0 f/kHz85.0
表2 光伏模拟器参数
Tab. 2 Parameters of photovoltaic simulator
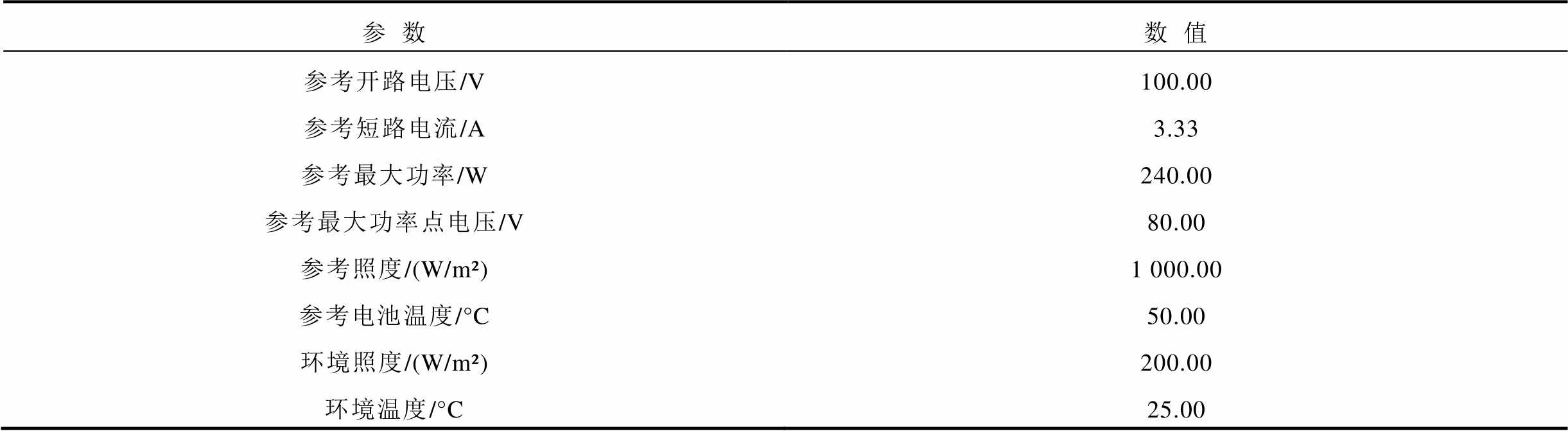
参数数值 参考开路电压/V100.00 参考短路电流/A3.33 参考最大功率/W240.00 参考最大功率点电压/V80.00 参考照度/(W/m²)1 000.00 参考电池温度/°C50.00 环境照度/(W/m²)200.00 环境温度/°C25.00
直流微电网的工作模式取决于电网负载,实验设置微电网负载为40Ω、20Ω和10Ω三个档位,用于模拟不同负荷功率,从而模拟本文预设的三种工况。各模式稳态实验结果如图14所示。图14左图为三种模式稳态下的功率分析仪截图。右图中从上至下四条波形分别对应通道1~4。其中,通道1为PV系统输出,通道2为EV-WPT系统输出,通道3为网侧储能输出,通道4为负荷输入。图14右图为三种模式下变换器驱动控制信号,其中vs为车载端H桥变流器输出电压,uGS-WPT、uGS-PV和uGS-bat分别为EV-WPT系统、PV系统、网侧储能对应DC-DC变换器的Q1开关管驱动电压波形。
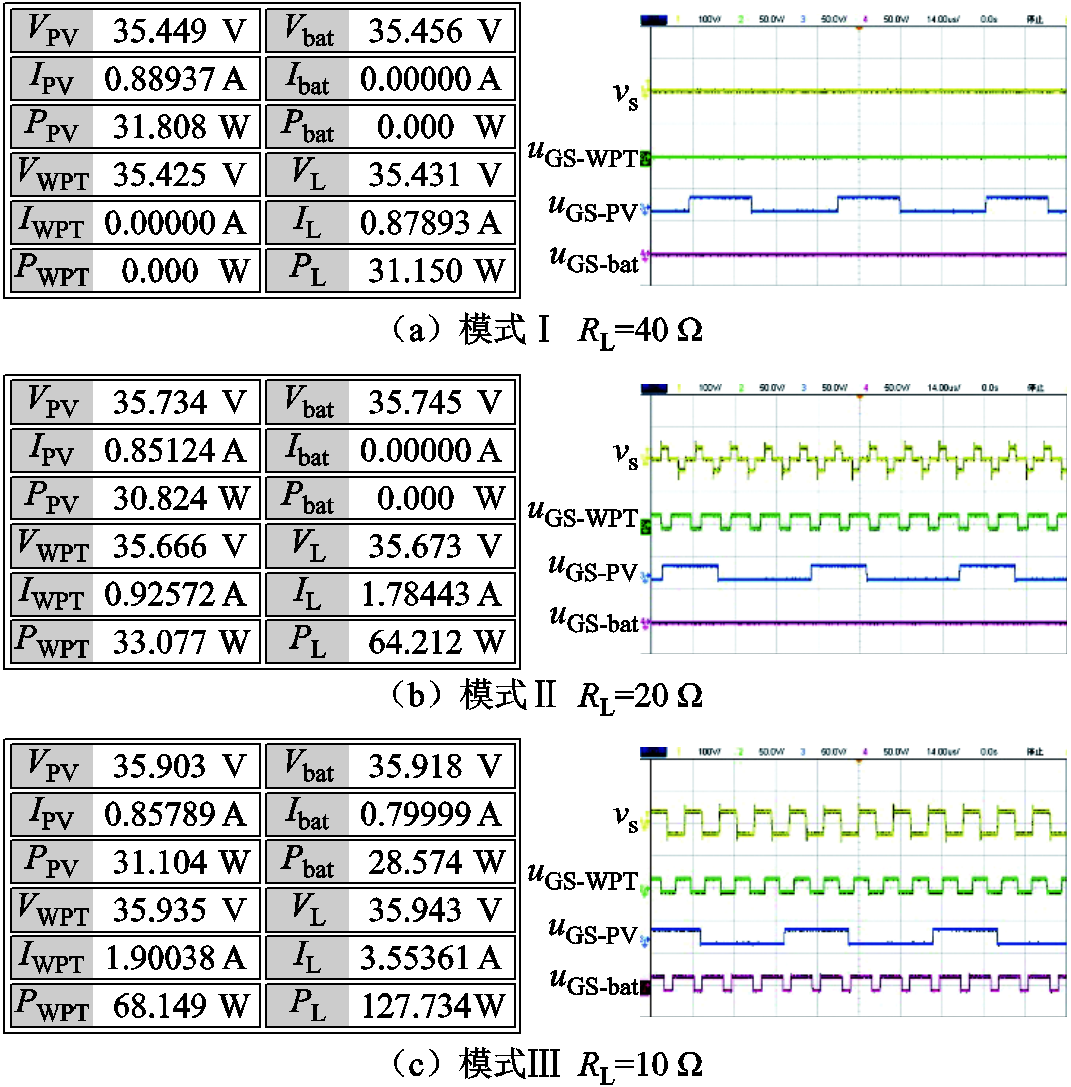
图14 各模式稳态实验结果
Fig.14 Steady experimental results of three modes
由图14可看出,在模式Ⅰ(轻载)中,仅PV出功。在图14a右图中,通道1、2、4为闭锁状态,仅通道3的PV端DC-DC在进行MPPT控制。对应左图为EV-WPT侧、地面储能侧输出量为0W,仅PV侧有输出功率。
在模式Ⅱ(半载)中,PV系统与工作于V2G模式下的EV-WPT系统协同出功,对应左图中PPV+PWPT=PL。在图14b右图中,通道3的PV端DC-DC在进行MPPT控制;EV-WPT系统则将剩余功率缺额补足并保持母线电压稳定,因此右图中vs处于移相状态,对应左图中EV-WPT系统输出功率PWPT介于模式Ⅰ的零出功与模式III中的满功率之间。
在模式Ⅲ(重载)中,PV系统、工作于V2G模式下的EV-WPT系统以及网侧储能协同出功,对应左图中PPV+PWPT+Pbat = PL。在图14c右图中,通道3的PV端DC-DC在进行MPPT控制;EV-WPT系统工作于满功率输出状态,因此右图中vs的移相角为0,对应左图中PWPT大于模式Ⅰ和Ⅱ中的PWPT;网侧储能则将剩余功率缺额补足并保持母线电压稳定,因此由通道4可看出此时地面储能已启动。
图15为直流微电网在三种运行模式间切换时的动态波形。Vbus为母线电压,IL、IbWPT和Ibat分别为电网负载电流、模拟车载电池输出电流、模拟网侧储能输出电流。
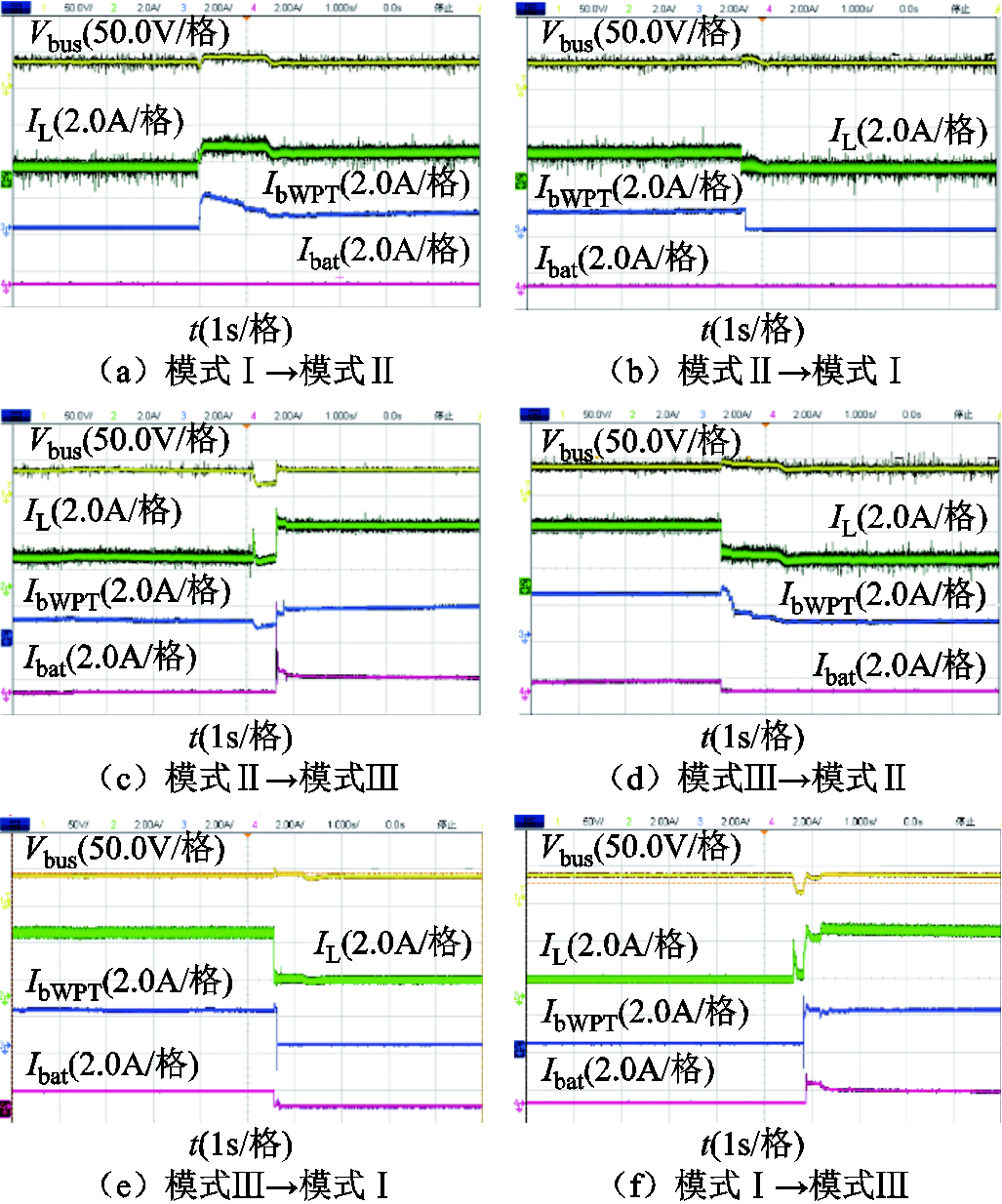
图15 各模式动态切换实验结果
Fig.15 Dynamic experimental results of three modes
图15a和图15b为系统在模式Ⅰ、Ⅱ间的切换波形。由图可知,当负荷加重时,控制器检测到Pvac>0,使能EV-WPT系统车载端H桥变流器、DC-DC变换器,经过1.3s的软启动以及控制过程,母线电压恢复额定值36V;当负荷变轻时,控制器检测到Pvac≤0,瞬时闭锁EV-WPT系统各单元,EV-WPT系统退出运行,母线电压恢复额定值。
图15c和图15d为模式Ⅱ、Ⅲ间的切换波形。由图可知当负载继续加重时,模式Ⅱ的PV与EV-WPT系统协同已难以维持母线电压稳定,车载端H桥变流器移相值已达到极限,此时控制器使能网侧储能DC-DC变换器,系统进入模式Ⅲ。网侧储能介入填补功率缺额,母线电压迅速恢复,同时EV-WPT继续执行MPET控制;当负荷减轻时,控制器检测到Pvac≤P*,此时判定PV与EV-WPT系统协同可以维持负荷功率需求,闭锁网侧储能DC-DC变换器,母线电压由EV-WPT车载端H桥变流器调节。经过PI控制母线电压在1s后恢复额定值。由于从模式Ⅰ、Ⅲ切换到模式Ⅱ需要EV-WPT系统软启动或者控制介入,因此这两种切换需要花费更多的时间重新进入稳态。
考虑极端工况,模式Ⅰ、Ⅲ间的切换如图15e、图15f所示。当负荷从重载突降为轻载,控制器检测到Pvac≤0,同时闭锁EV-WPT及储能系统,由光伏系统将母线电压恢复到额定值。当负荷由轻载突增为重载,控制器检测到Pvac>P*,此时可判定功率缺额严重,EV-WPT系统最优效率下满功率出功,母线电压由储能电池控制恢复至额定值。
为验证EV-WPT系统MPET控制算法的有效性,图16给出一簇EV-WPT系统效率关于DC-DC变换器占空比的关系曲线。由图可知,在占空比可调范围内,存在最大效率点。在不同负载情况下,实测的EV-WPT系统效率点基本位于理论效率曲线的最优点,且效率始终大于87%。
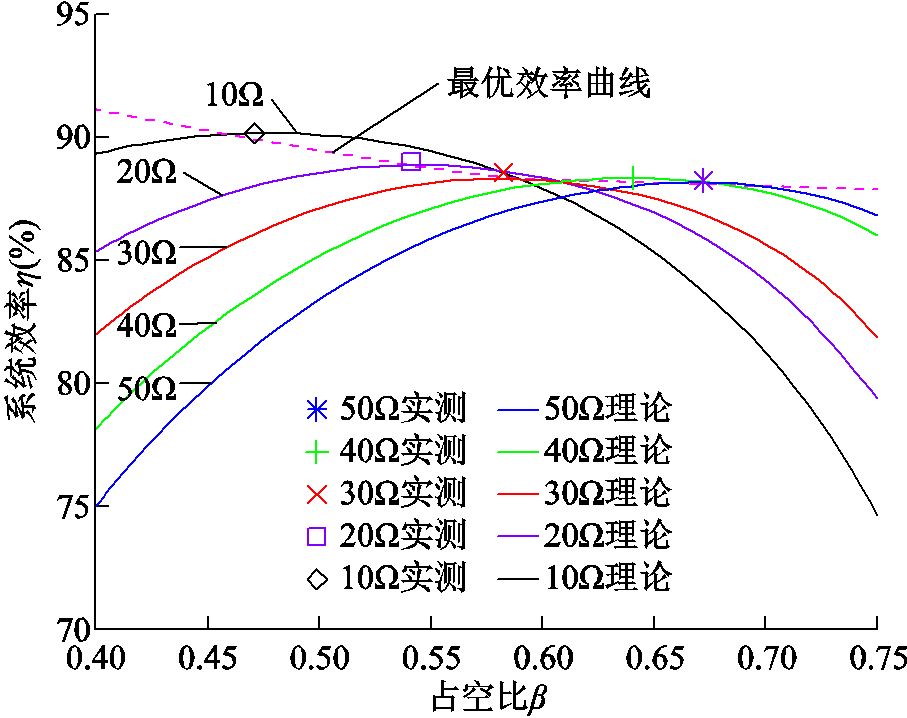
图16 电动汽车无线供电系统最大效率追踪曲线
Fig.16 Maximum power efficiency tracking curve of EV-WPT system
为验证PV系统MPPT控制算法的有效性,图17给出一簇PV系统输出功率关于DC-DC变换器占空比的实验数据。结合图14所示PV系统DC-DC不同模式的占空比可知,控制器计算占空比与实测MPP处的占空比一致,经控制可使PV实现最大功率输出。
实验结果验证了本文所构建的EV-WPT系统V2G模式下光储直流微电网及其能量管理策略可有效工作。在确保PV最大功率运行以及EV-WPT系统最优效率馈能的同时,实现不同电网负荷的供电以及母线电压的稳定。相较于现有文献提出的系统构架与能量管理方法,本文重点将EV-WPT与光储发电系统进行综合分析,并探究了EV-WPT系统在V2G模式下的光储直流微电网能量管理策略。
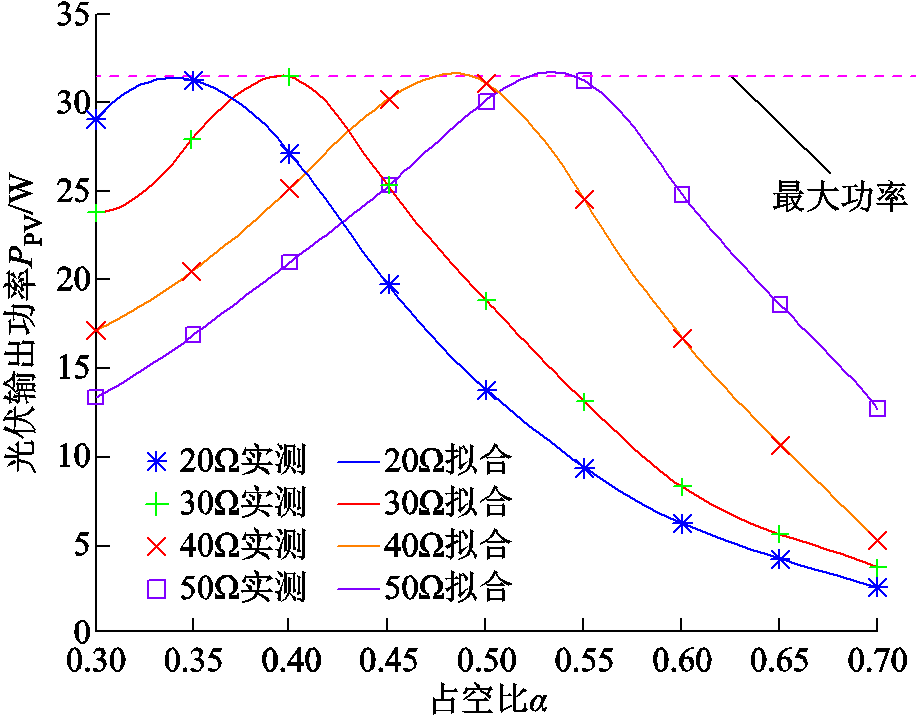
图17 光伏系统最大功率点追踪曲线
Fig.17 Maximum power point tracking curve of PV system
本文基于直流微电网源-荷关系,提出无线充电电动汽车V2G模式下光储直流微电网能量管理策略。基于PV系统、EV-WPT系统及网侧储能数学模型,分析微电网运行状态,定义了微电网稳定运行的三种模式以及对应的底层控制策略。通过分析变换器占空比与PV出功及负荷功率的关系,给出了EV-WPT系统DC-DC变换器占空比的临界条件表达式,并依此提出了微电网三种模式间相互切换的能量管理策略。最后搭建实验系统,验证了底层控制与上层运行模式切换共同作用下,母线电压可在电网负载发生跳变时迅速恢复并稳定至额定电压,且PV与EV-WPT系统分别工作于MPPT和MPET模式。
参考文献
[1] 陈奇芳, 刘念, 陈征, 等. 考虑充电需求与随机事件的光伏充电站实时运行策略[J]. 电工技术学报, 2016, 31(18): 142-150.
Chen Qifang, Liu Nian, Chen Zheng, et al. Real-time operation strategy for PV-based EV charging station considering charging demand and random events[J]. Transactions of China Electrotechnical Society, 2016, 31(18): 142-150.
[2] 杨晓东, 张有兵, 蒋杨昌, 等. 微电网下考虑分布式电源消纳的电动汽车互动响应控制策略[J]. 电工技术学报, 2018, 33(2): 390-400.
Yang Xiaodong, Zhang Youbing, Jiang Yangchang, et al. Renewable energy accommodation-based strategy for electric vehicle considering dynamic interaction in microgrid[J]. Transactions of China Electrotechnical Society, 2018, 33(2): 390-400.
[3] Huang Qilong, Jia Qingshan, Guan Xiaohong. Robust scheduling of EV charging load with uncertain wind power integration[J]. IEEE Transactions on Smart Grid, 2018, 9(2): 1043-1054.
[4] Sabillon C, Franco J F, Rider M J, et al. Joint optimal operation of photovoltaic units and electric vehicles in residential networks with storage systems: a dynamic scheduling method[J]. International Journal of Electrical Power & Energy Systems, 2018, 103: 136-145.
[5] 陈丽娟, 秦萌, 顾少平, 等. 计及电池损耗的电动公交车参与V2G的优化调度策略[J]. 电力系统自动化, 2020, 44(11): 52-60.
Chen Lijuan, Qin Meng, Gu Shaoping, et al. Optimal dispatching strategy of electric bus participating in vehicle-to-grid considering battery loss[J]. Automation of Electric Power Systems, 2020, 44(11): 52-60.
[6] Rao Yingqing, Yang Jun, Xiao Jinxing, et al. A frequency control strategy for multimicrogrids with V2G based on the improved robust model predictive control[J]. Energy, 2021, 222: 119963.
[7] Mazumder M, Debbarma S. EV charging stations with a provision of V2G and voltage support in a distribution network[J]. IEEE Systems Journal, 2021, 15(1): 662-671.
[8] 姚一鸣, 赵溶生, 李春燕, 等. 面向电力系统灵活性的电动汽车控制策略[J/OL].电工技术学报, 2021,https://doi.org/10.19595/j.cnki.1000-6753.tces.210515.
Yao Yiming, Zhao Rongsheng, Li Chunyan, et al. control strategy of electric vehicles oriented to power system flexibility[J/OL]. Transactions of China Electrotechnical Society: 2021. https://doi.org/10. 19595 /j.cnki.1000-6753.tces. 210515.
[9] 邓艺璇, 黄玉萍, 黄周春. 基于随机森林算法的电动汽车充放电容量预测[J/OL].电力系统自动化, 2021, 45(21): 181-188.
Deng Yixuan, Huang Yuping, Huang Zhouchun. Charging and discharging capacity forecasting of electric vehicles based on random forest algorithm[J/OL]. Automation of Electric Power Systems, 2021, 45(21): 181-188.
[10] Fu Minfan, Tang Zefan, Ma Chengbin. Analysis and optimized design of compensation capacitors for a megahertz WPT system using full-bridge rectifier[J]. IEEE Transactions on Industrial Informatics, 2019, 15(1): 95-104.
[11] He Rong, Zhao Peng, Fu Minfan, et al. Decomposition and synthesis of high-order compensated inductive power transfer systems for improved output controllability[J]. IEEE Transactions on Microwave Theory and Techniques, 2019, 67(11): 4514-4523.
[12] 赵鱼名, 王智慧, 苏玉刚, 等. 基于T型CLC谐振网络的恒压型电场耦合电能传输系统负载自适应技术[J]. 电工技术学报, 2020, 35(1): 106-114.
Zhao Yuming, Wang Zhihui, Su Yugang, et al. Load adaptive technology of constant voltage electric-field coupled power transfer system based on T-CLC resonant network[J]. Transactions of China Electrotechnical Society, 2020, 35(1): 106-114.
[13] Feng Junjie, Li Qiang, Lee Fred C, et al. LCCL-LC resonant converter and its soft switching realization for omnidirectional wireless power transfer systems[J]. IEEE Transactions on Power Electronics, 2021, 36(4): 3828-3839.
[14] Xia Chenyang, Wei Nan, Zhang Hongtai, et al. Multifrequency and multiload MCR-WPT system using hybrid modulation waves SPWM control method[J]. IEEE Transactions on Power Electronics, 2021, 36(11): 12400-12412.
[15] 卿晓东, 苏玉刚. 电场耦合无线电能传输技术综述[J]. 电工技术学报, 2021, 36(17): 3649-3663.
Qing Xiaodong, Su Yugang. An overview of electric-field coupling wireless power transfer technology[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3649-3663.
[16] 赵靖英, 张振远, 张珂. 基于H∞非线性控制器的电动汽车无线充电系统的副边控制设计与参数优化[J].电工技术学报, 2021, 36(21): 1-12.
Zhao Jingying, Zhang Zhenyuan, Zhang Ke. Control design and parameter optimization on secondary side of electric vehicle wireless charging system based on H∞ nonlinear controller[J]. Transactions of China Electrotechnical Society, 2021, 36(21): 1-12.
[17] Yang L, Zhang Y, Li X, et al. Analysis and design of four-plate capacitive wireless power transfer system for undersea applications[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(3): 202-211.
[18] Lee H S, Yun J J. Three-port converter for integrating energy storage and wireless power transfer systems in future residential applications[J]. Energies, 2020, 13(1): 272.
[19] 方华亮, 彭辉, 李大虎, 等. 面向电动汽车路面无线充放电的移动微网[J]. 高电压技术, 2016, 42(7): 2119-2126.
Fang Hualiang, Peng Hui, Li Dahu, et al. Mobile microgrid based on electric vehicle on-road wireless charging and discharging[J]. High Voltage Engineering, 2016, 42(7): 2119-2126.
[20] Zhao Zhihao, Sun Yue, Hu Aiguo Patrick, et al. Energy link optimization in a wireless power transfer grid under energy autonomy based on the improved genetic algorithm[J]. Energies, 2016, 9(9): 682.
[21] 刘杰. 风光互补微电网为电动汽车无线充电研究[D]. 天津: 天津工业大学, 2016.
[22] Sánchez-Sáinz H, García-Vázquez C-A, Llorens Iborra F, et al. Methodology for the optimal design of a hybrid charging station of electric and fuel cell vehicles supplied by renewable energies and an energy storage system[J]. Sustainability, 2019, 11(20): 5743.
[23] Subudhi P S, Subramanian K, Retnam B B J D. Wireless electric vehicle battery-charging system for solar-powered residential applications[J]. International Journal of Power and Energy Systems, 2019, 39(3): 130-140.
[24] 龚政. 伪连续导电模式四开关Buck-Boost变换器控制策略研究[D]. 成都: 西南交通大学, 2020.
[25] 李捷. 基于四管Buck-Boost的数字控制光伏功率优化器的研究[D]. 北京: 北方工业大学, 2018.
[26] Zhang Kehan, Ye Tianwei, Yan Zhengchao, et al. Obtaining maximum efficiency of inductive power-transfer system by impedance matching based on Boost converter[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 488-496.
Research on Power Management Strategy of DC Microgrid with Photovoltaic, Energy Storage and EV-Wireless Power Transfer in V2G Mode
Abstract With the rapid increase of electric vehicles (EVs), it is essential to build a low-carbon, flexible and stable charging method for EVs. This paper integrated DC microgrid, wireless power transfer (WPT), vehicle-to-grid (V2G) technologies, and focused on the power management strategy of DC microgrid with photovoltaic, energy storage and WPT system in V2G mode. The mathematical models for photovoltaic, WPT, and energy storage were established, respectively. Considering the photovoltaic power output and the load power level, the critical conditions for the WPT system under maximum power efficiency status were derived, and the output function of the energy storage beyond the critical conditions was given. Based on this, the three operating modes and boundary conditions of the DC microgrid were defined, the upper-level controller was designed to switch between the three modes. An experimental system was constructed to verify that the proposed hierarchical control algorithm can effectively maintain the stability of the bus voltage. The maximum power of the photovoltaic system and the optimal efficiency operation of the WPT system were also guaranteed.
keywords:DC microgrid, photovoltaic, wireless power transfer, vehicle to grid, electric vehicle
DOI:10.19595/j.cnki.1000-6753.tces.211279
中图分类号:TM724
四川省科技计划(2021YFH0039)和国家自然科学基金(51907170)资助项目。
收稿日期 2021-08-16
改稿日期 2021-10-26
周 玮 男,1990年生,讲师,硕士生导师,研究方向为无线电能传输、电能变换器。E-mail:wzhou@swjtu.edu.cn (通信作者)
蓝嘉豪 男,1998年生,硕士研究生,研究方向为无线电能传输、直流微电网。E-mail:lanjiahao@my.swjtu.edu.cn
(编辑 郭丽军)