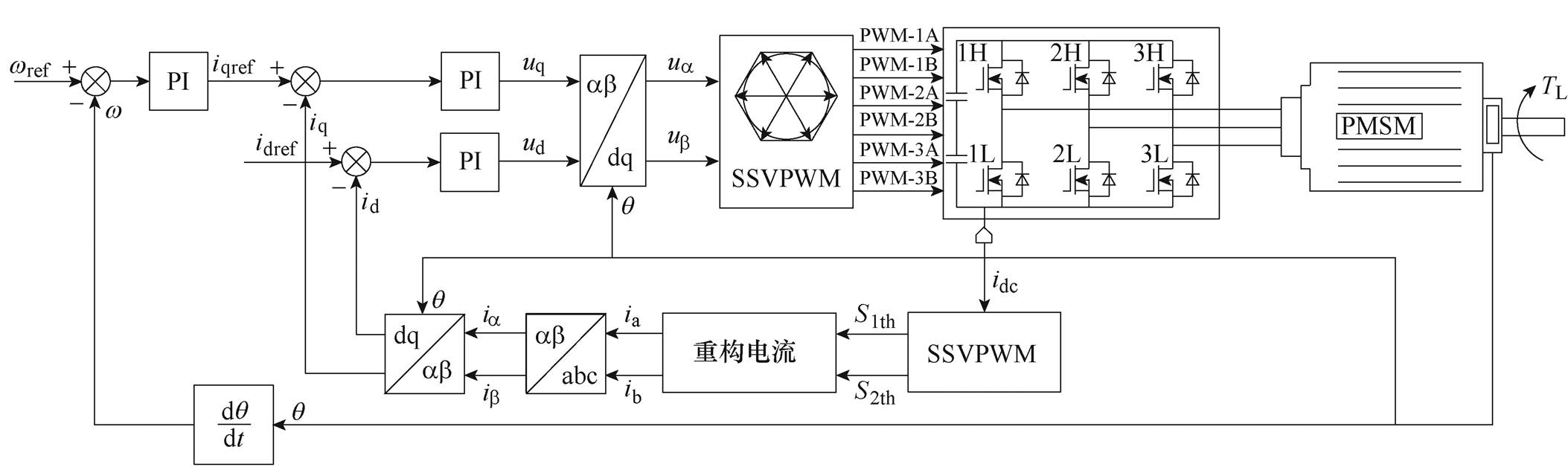
图1 永磁同步电机SSVPWM控制系统
Fig.1 PMSM system control diagram of SSVPWM
摘要 针对直流母线采样电机控制系统电压空间矢量脉冲宽度调制问题,分析传统空间矢量脉冲宽度调制(SVPWM)方法的电流采样机理,揭示其在直流母线采样系统中不可观测区域的存在机理,通过定义最小采样时间的概念精确划分出直流母线电流采样不可观测区域,进而通过插入测量矢量和补偿矢量提出直流母线采样电压空间矢量脉冲宽度调制(SSVPWM)方法及其电流重构策略。通过实验验证了所提方法的电流采样误差低于2%、相电流高次谐波含量低于3%、三相电流畸变率低于1.6%,为高性能矢量控制提供了精确的电流测量。
关键词:脉冲宽度调制 直流母线电流采样 最小采样时间 相电流重构 采样电压空间矢量脉冲宽度调制方法
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有功率密度高、调速范围宽以及动态响应快等诸多优点,广泛应用于伺服驱动、电动汽车等领域。电压空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)技术因其良好的静态和动态性能,广泛应用于永磁同步电机驱动系统。电机相电流是矢量控制系统和保护策略的关键参数,准确地检测相电流对提高控制系统性能具有重要意义[1-2]。
采用传统的SVPWM方式时,直流母线电流采样会出现由于电压矢量作用时间过短,而无法观测到相电流的情况。针对此类问题,文献[3]提出一种三态脉宽调制(Tristate Pulse Width Modulation, TSPMW)技术,使用三个相邻的开关状态构成参考电压,一定程度上缩小了不可观测区域范围,同时减小了共模电压。文献[4-5]通过在SVPWM周期末端插入测量电压矢量,实现了相电流的重构,但是也增加了开关损耗,且此方法的使用范围有限。文献[6]提出一种新的零电压矢量检测方法(Zero Voltage Vector Sampling Method, ZVVSM),该方法在不改变PWM信号的情况下,通过将低调制区域和扇区边界区域的电流重构死区移向空间矢量六边形轮廓,避免了开关次数的增加。文献[7-10]所提出的PWM移相法,能够在非零电压矢量作用时间过短时,通过移动PWM波形来增大电流的可观测区域,但这种方法仍可能出现移相后的电压矢量作用时间小于最小采样时间的情况。文献[11]采用非对称PWM方法,实现了非观测区的部分电流观测,但可观测范围有限。文献[12]通过将两个具有不同相位和幅值的附加矢量组合成指定的电压指令矢量,来获得可观测的母线电流,但是同时也引入了谐波,导致实际电流波形发生一定程度的畸变。文献[13]提出了一种新的混合PWM技术,在减小电流失真的同时,一定程度上扩大了电流重构范围。
本文通过定义最小采样时间的概念精确划分出直流母线电流采样不可观测区域,通过插入测量矢量和补偿矢量提出了直流母线采样电压空间矢量脉冲宽度调制(Sampling Voltage Space Vector Pulse Width Modulation, SSVPWM)方法,有效地减少了采样点的更新频率,同时避免了由于电流振荡而导致的错误采样。所提出的SSVPWM方法实现了不同调制比下的电流采样和重构。同时,详细地给出系统执行的实时结构,并进行匀速、变速、低调制比、电流突变等情况下的实验。结果证明,该方法的动静态性能良好,能够准确地实现相电流重构,同时相电流谐波含量和电流畸变率较低,可为高性能矢量控制提供精确的电流测量。
所设计的永磁同步电机SSVPWM控制系统如图1所示。
SVPWM是一种以生成圆形磁链为目标的控制磁链跟踪控制方法,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆。直流母线电流检测电路如图2所示,三相电压型逆变电路的三个桥臂均以1表示上桥臂闭合,0表示下桥臂闭合[14-18]。
在SVPWM方式的驱动下,存在八种基本开关状态,这八种基本开关状态构成了PWM逆变器的八种基本电压矢量,分别为6个基本非零矢量V1(100)、V2(110)、V3(010)、V4(011)、V5(001)、V6(101)和2个零矢量V0(000)、V7(111)[18-22]。磁链的轨迹控制是通过交替使用不同的电压空间矢量实现的,如图3所示。可根据八种基本电压矢量将整个空间电压矢量平面分为6个扇区。
图1 永磁同步电机SSVPWM控制系统
Fig.1 PMSM system control diagram of SSVPWM
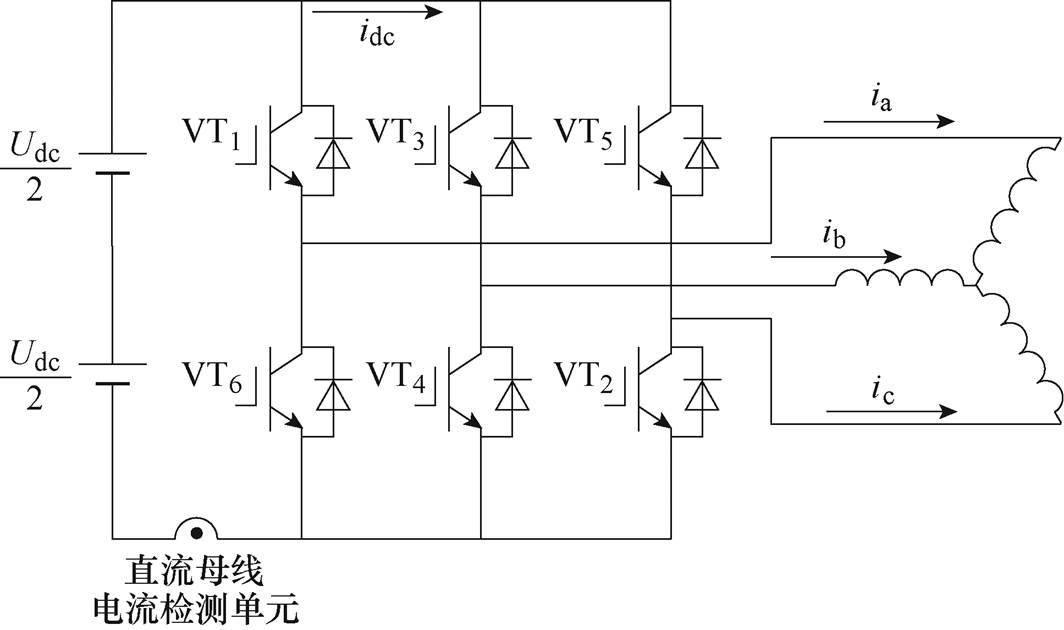
图2 直流母线电流检测电路
Fig.2 DC bus current detection circuit

图3 空间电压矢量
Fig.3 Voltage space vectors
直流母线采样法通过将电流检测单元安装在直流母线上,获得直流母线上的电流信息,如图2所示。直流母线瞬时电流与电机相电流之间的关系取决于逆变器的开关状态,即在不同的基本电压矢量作用下,直流母线电流与电机相电流的关系不同。以V1(100)和V2(110)为例:V1(100)作用时,VT1、VT2和VT4导通,VT3、VT5和VT6关断,电机A相电流ia流过了直流母线,此时的直流母线电流idc与电机A相电流相等,idc=ia,如图4a所示。V2(110)作用时,VT1、VT2和VT3导通,VT4、VT5和VT6关断,流过直流母线的为电机A相电流ia和电机B相电流ib,此时的直流母线电流idc=ia+ib,如图4b所示。由于电机三相电流ia、ib、ic的关系为

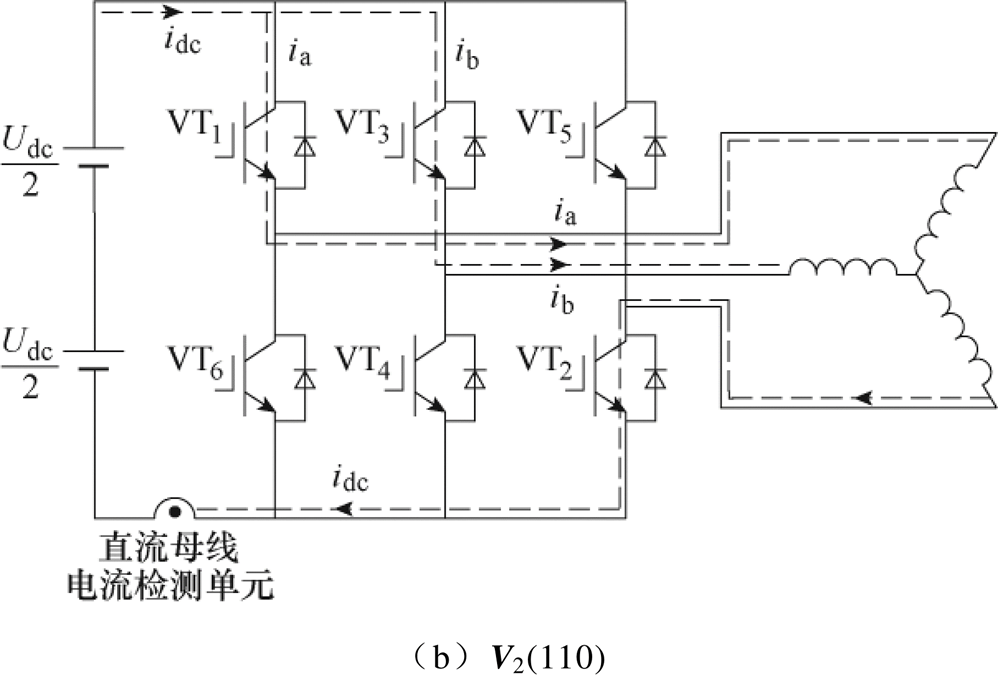
图4 电压矢量V1(100)和V2(110)作用时电流流向及路径
Fig.4 Paths of the current flow at two voltage vectors
 (1)
(1)故V2(110)作用时, 。
。
不同基本电压矢量作用时直流母线电流与电机相电流的关系见表1。
表1 直流母线电流与电机相电流的关系
Tab.1 Relationship between the DC bus currents and the phase currents

基本电压矢量直流母线电流 V1(100)ia V2(110)-ic V3(010)ib V4(011)-ia V5(001)ic V6(101)-ib
采用七段式SVPWM方法时,在一个扇区内,分别有两个非零基本矢量和两个零矢量共同作用。以第1扇区为例,在一个PWM周期内,当两个零矢量作用时,逆变器只有上桥臂导通或只有下桥臂导通,直流母线的电流为零;当两个非零矢量作用时,直流母线就会有电流流过,此时在直流母线上可以测得电流信息,如图5所示。
由于PWM是对称的,将前半周期作为分析对象,两个非零电压矢量的作用时间分别为Tsig1和Tsig2,在这两个时间段内可以对直流母线电流进行采样得到A相电流值ia和C相电流的负值-ic。
在实际电路中,由于IGBT导通时间Ton、PWM死区时间Tdb以及A-D转换时间的存在,直流母线在桥臂导通时并不能立即出现电流;又因为电流上升时间Trise和采样电路运放器摆率Tsr的存在,母线电流不能立即稳定,往往需要一定的时间,如图6所示。
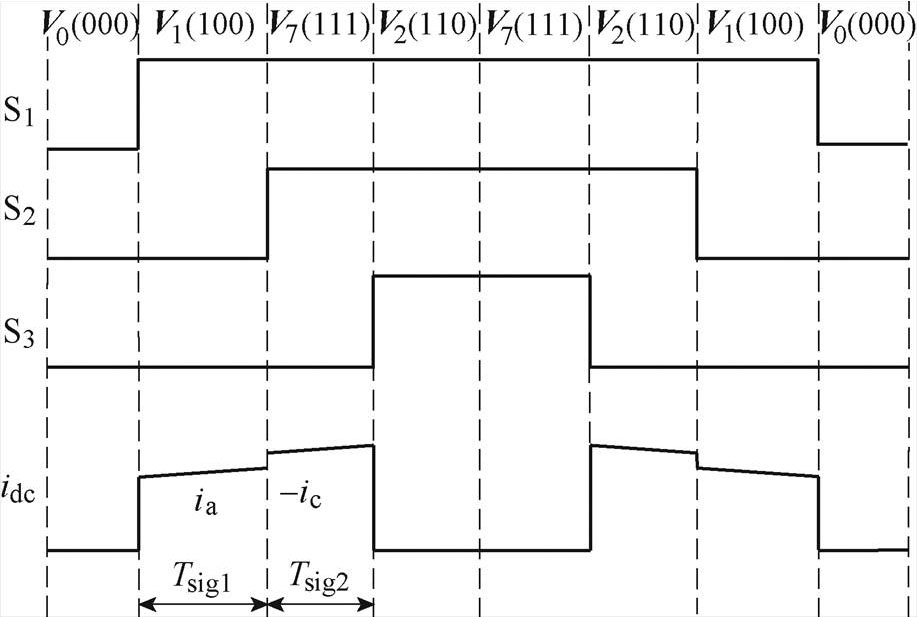
图5 第1扇区PWM与直流母线电流
Fig.5 PWM and DC bus current in sector 1
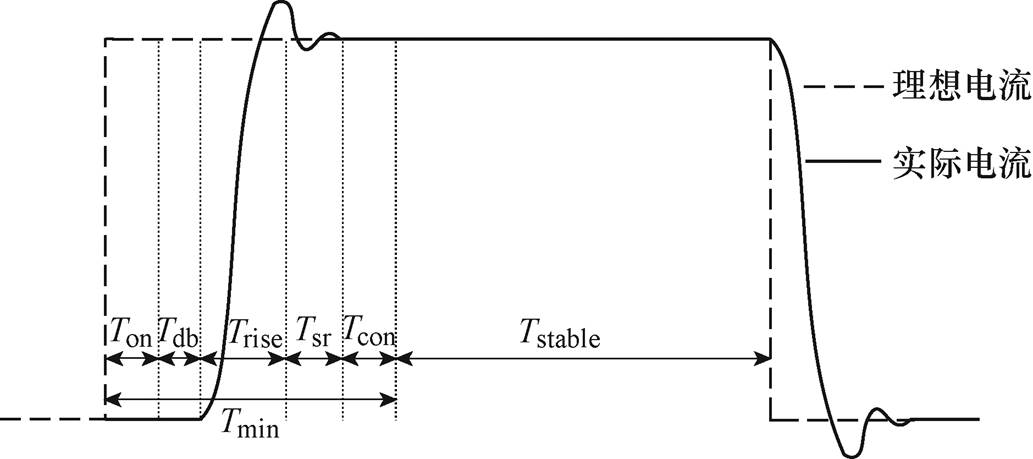
图6 实际电流与理想电流
Fig.6 Actual current and ideal current
综合上述情况,为实现电流信息的精准采样,必须给予采样过程时间上的保证。因此将能采样到准确电流信息的最少所需时间定义为最小采样时间Tmin,有
 (2)
(2)式中,Tcon为A-D转化时间。
当出现Tsig1≤Tmin或Tsig2≤Tmin的情况时,由于PWM占空比接近,开关状态维持时间太短,无法测量到准确的电流信息,故将在扇区内出现这种情况的区域称为不可观测区域,主要包括扇区边界区和低调制区,如图7所示。
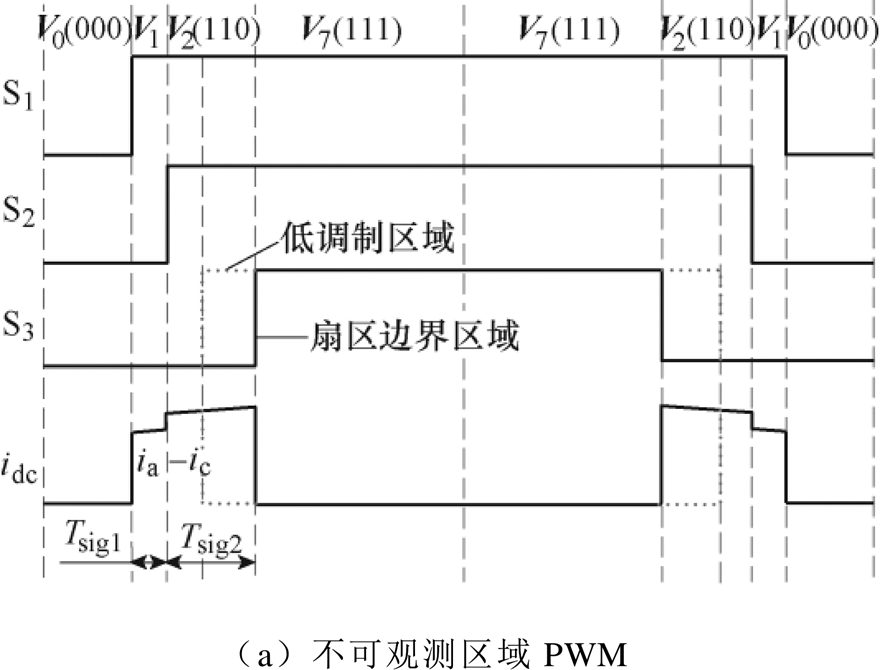

图7 不可观测区域示意图
Fig.7 Unobservable area
在扇区边界区域,任意两相PWM的占空比较为接近,从而导致非零基本矢量的作用时间过短,见图7a中S1和S2。在不可观测区域内,SSVPWM首先在PWM波形中插入测量矢量,为保证能在充分的时间进行电流测量,插入测量矢量时间Tdef应满足
 (3)
(3)如果Tdef太短,重构电流的精度将会降低;但Tdef太长,又会引入额外的电流失真。为了确保精确的电流重建并同时减小电流失真,根据实验经验,这里令Tdef=1.2(Tmin+Tdb)。
扇区边界SSVPWM示意图如图8所示。为了不改变原有PWM的占空比和对称性,按照插入多少补偿多少的原则,在该相PWM的两端进行补偿,S1从低电平跳变到高电平处和从高电平跳变到低电平处分别向前和向后移Tdef/2,见图8中的Sa。
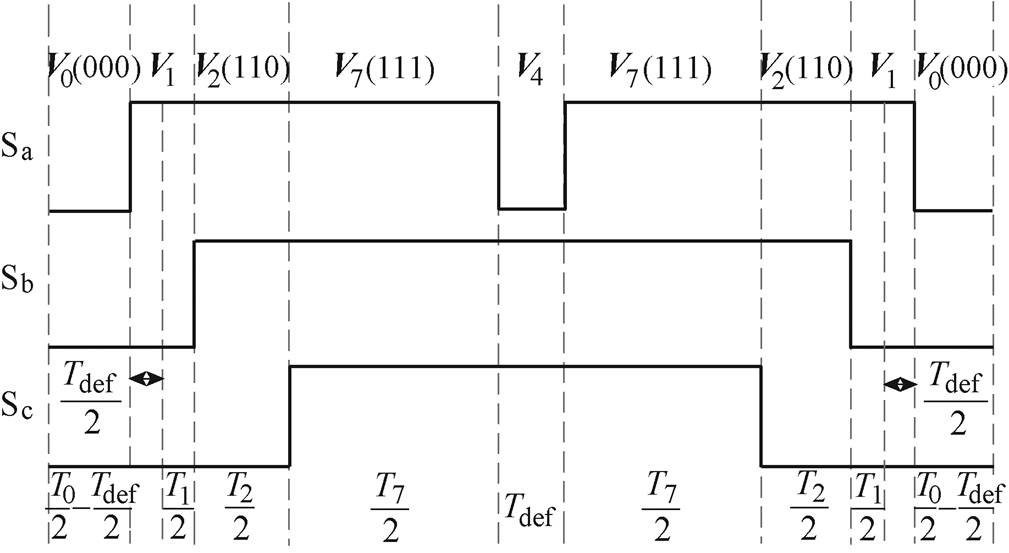
图8 扇区边界SSVPWM示意图
Fig.8 SSVPWM in sector boundary region
由于PWM波插入和补偿的发生,势必会在该扇区引入新的非零基本电压矢量,见图7中的V4(011),作用时间为Tdef。令该扇区的合成电压为Vref,作用时间为Ts,在原SVPWM周期中,有
 (4)
(4)而在SSVPWM中,令该扇区的合成电压为 ,有
,有
 (5)
(5)
又因
 (6)
(6)故
 (7)
(7)
即
 (8)
(8)因此,SSVPWM并没有改变合成电压矢量的大小和方向,没有引入相电流畸变。
在低调制区域,三相PWM的占空比较为接近,因此在两个非零电压基本矢量作用时均无法采样到电流信息。如果沿用扇区边界的解决方案,则只有一相电流可以被获取,仍无法重构出三相电流。为了解决此问题,在低调制区使用双测量矢量插入法,低调制区域SSVPWM示意图如图9所示,即在PWM周期中部插入两个测量矢量,且两个测量电压矢量V3、V4作用时间Tlm1、Tlm2的关系为
 (9)
(9)
图9 低调制区域SSVPWM示意图
Fig.9 SSVPWM in low modulation region
由图9可知,在1扇区低调制区域,SSVPWM下的各基本电压矢量作用时间。又因V4=-V1,V3= V2-V1,根据伏秒平衡原理,可以得到与式(8)相同的结论。
上述分析可知,每个PWM周期都会产生4个电流信号,由于重构三相电压至少要获得两相电流信息,所以在一个PWM周期内必须对直流母线采样两次,可观测区域采样时如图10所示,T1、T2和T3分别为三相PWM上升沿时刻。令Tmid为PWM中间时刻。
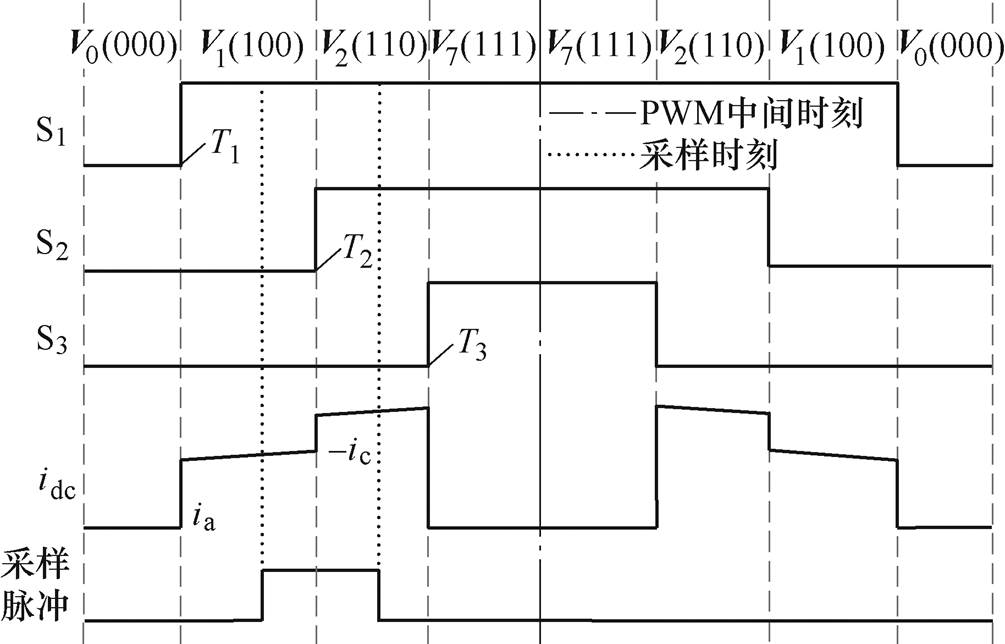
图10 可观测区域采样时刻
Fig.10 Sampling point in observable area
仍以扇区1为例,在可观测区域,第一次采样时刻为Tsample1=(T1+T2)/2+Tdelay;第二次采样时刻为Tsample2=(T2+T3)/2+Tdelay。其中,Tdelay为采样延时时间。理论上,采样脉冲应在T1和T2的中间时刻触发采样,但是根据1.2节的分析可知,电流稳定需要时间,虽然在中间时刻采样不用考虑IGBT导通和死区时间,但是仍然可能受到电流上升阶段以及运放器件的摆率影响,为了排除这种影响,给予采样时刻一定的延时,有
 (10)
(10)扇区边界采样时刻如图11所示,在不可观测区域的扇区边界,第一次采样时刻为Tsample1=(T2+T3)/2+ Tdelay;第二次采样为Tsample2=Tmid+Tdelay。
低调制区采样时刻如图12所示,在低调制区,第一次采样时刻为Tsample1=(T2+T3+Tdef)/2+Tdelay;第二次采样不变。T1、T2和T3分别为原三相PWM上升沿时刻。
由上述分析可知,在原不可观测区内,当电压矢量作用时间小于Tmin时,通过测量矢量获取相电流信息,有效消除了不可观测区。
为了区分电流极性,设定一个电流偏置Soffset。如图10所示,若将两次采样结果ia和-ia的数据分别赋予S1th和S2th,直流母线电流检测单元的采样实际值va,vc应为va=S1th-Soffset,vc=S2th-Soffset。因此可求出实际相电流为

图11 扇区边界采样时刻
Fig.11 Sampling point in sector boundary region
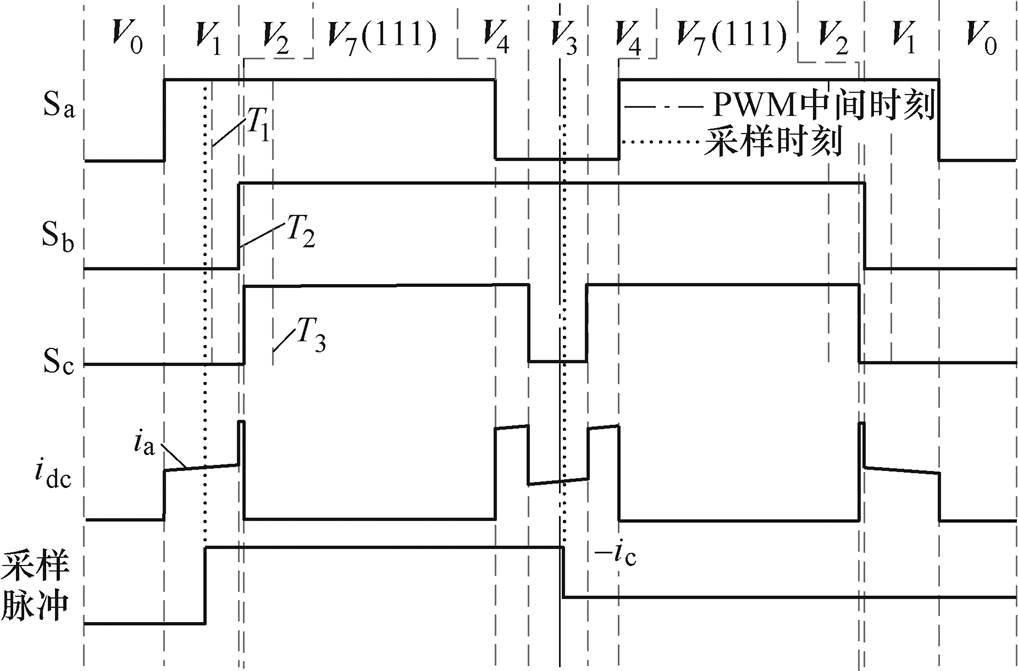
图12 低调制区采样时刻
Fig.12 Sampling point in low modulation region
 (11)
(11)式中,G为直流母线电流检测单元的增益。已测得两相电流,可根据式(1)求得第三相电流为
 (12)
(12)
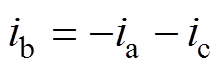
图13所示为系统执行的实时结构。所设计的SSVPWM方法中,PWM与主中断共用同一个时钟频率。为了使采样更加精确,采用PWM中断单独触发,A-D转化结束后,立即更新下一次采样的采样时刻。由于系统的PWM为上下计数模式,为了简化程序,保证A-D采样转换不占用太长时间,故均在向上计数时进行采样。另外为保证采样的准确性,每次采样前均设置一次伪采样。同时在PWM的后半周期执行主中断,可保证数据处理时采样转换完全结束。
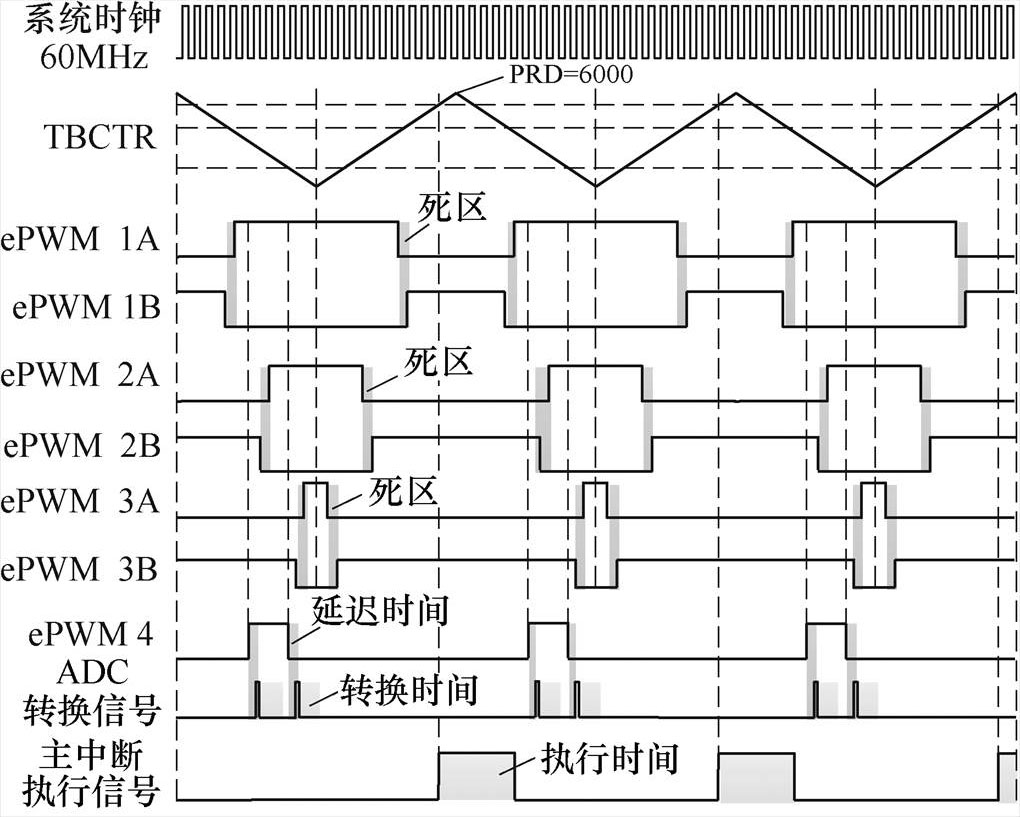
图13 系统时序结构
Fig.13 Real-time structure of system
为了验证所提出的直流母线电流采样电压空间矢量脉冲宽度调制方法的实际效果,在图14所示的实验平台上进行实验验证。采用TMS320F28035型数字信号处理器(Digital Signal Processor, DSP),PWM载波频率为5kHz,逆变器开关频率为10kHz。采用一台内置2 500线增量式编码器的永磁同步电机,通过MDA800A型电机驱动分析仪,对实验数据进行采集和分析。此外,采用型号为1LE001- 1AB42的西门子三相感应电机作为负载电机。表2为实验所采用的永磁同步电机参数。
图14 实验平台
Fig.14 Experimental setup
表2 永磁同步电机参数
Tab.2 Parameters of PMSM

参 数数 值 相数m3 功率/kW2.7 极对数p2 额定转速/(r/min)1 500 相额定电流/A10.5 额定电磁转矩/(N·m)17.1 定子电阻Rs/W0.322 直轴电枢电感Ld/mH5.3 交轴电枢电感Lq/mH5.3 额定频率/Hz50
图15为可观测区域PWM波形与直流母线电流瞬时波形。可知,三路PWM(死区时间为2ms)跳变沿之间的相域充足,满足最小采样时间;图16和图17分别为不可观测区域中扇区边界和低调制区的PWM波形及电流采样时刻。可以看出,在PWM周期内的相应位置被插入了测量矢量和补偿矢量,其中Tdef=6ms。系统对可观测区域与不可观测区域进行准确划分,且采样脉冲能够准确触发。
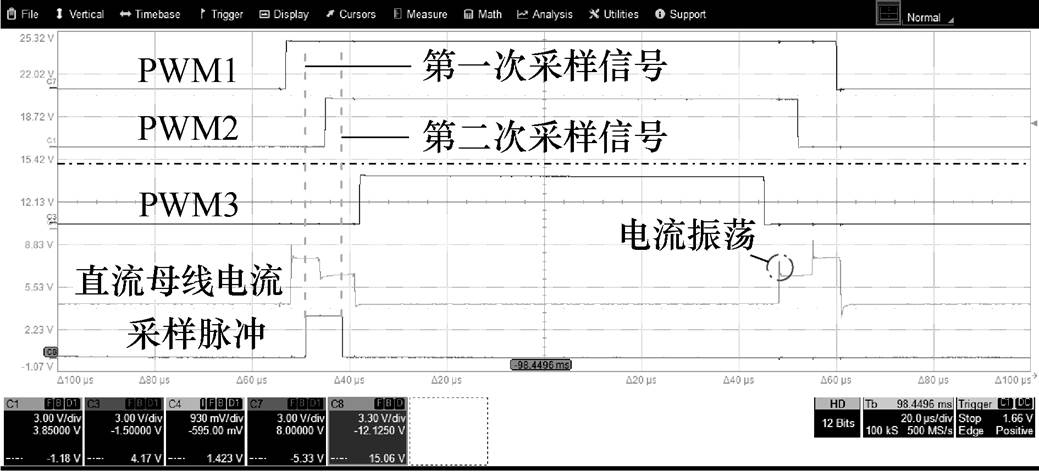
图15 可观测区域PWM波形与直流母线电流瞬时波形
Fig.15 PWM waveforms and instantaneous current waveforms in observable area

图16 扇区边界的PWM波形与直流母线电流瞬时波形
Fig.16 PWM waveforms and instantaneous current waveforms in sector boundary region

图17 低调制区的PWM波形与直流母线电流瞬时波形
Fig.17 PWM waveforms and instantaneous current waveforms in low modulation region
由于死区和IGBT导通时间的限制,直流母线电流并未在PWM上跳沿处立即出现。同时受运放摆率的影响,电流上升后出现了一段时间的振荡,这在图15~图17中都得到了体现,故实际采样时间是在采样脉冲出现后延时Tdelay=1ms进行采样的。
重构电流与实际电流波形如图18所示。图18a给出了相电流为3A时的实际波形和重构波形。在SSVPWM方式下,重构出的相电流与实际电流波形基本一致。此外,由于采样转换时间以及相电流重构算法的执行,必须消耗一定的时间,所以相比于实际电流,重构电流的相位不可避免地会出现少许延迟。图18c给出了相电流为4.5A时的实际波形和重构波形。图18b和图18d分别为相电流为3A和4.5A时实际电流与重构电流误差。误差e为
 (13)
(13)式中,Imeasured为实际相电流;Ireconstructed为重构相电流。可见,在实际相电流值不同时,本文所提策略都能够对相电流进行采样和重构,且吻合度较高。
为了验证相电流重构方法的实际可靠性,本实验对电机不同速度阶段的电流波形进行了测试。图19为电机从静止起动到运行整个过程中A相电流的实际波形和重构波形。可以看到,无论是在变速还是匀速阶段,相电流都能准确地重构。

图18 重构电流与实际电流波形
Fig.18 Waveforms of reconstructed currents and true phase currents
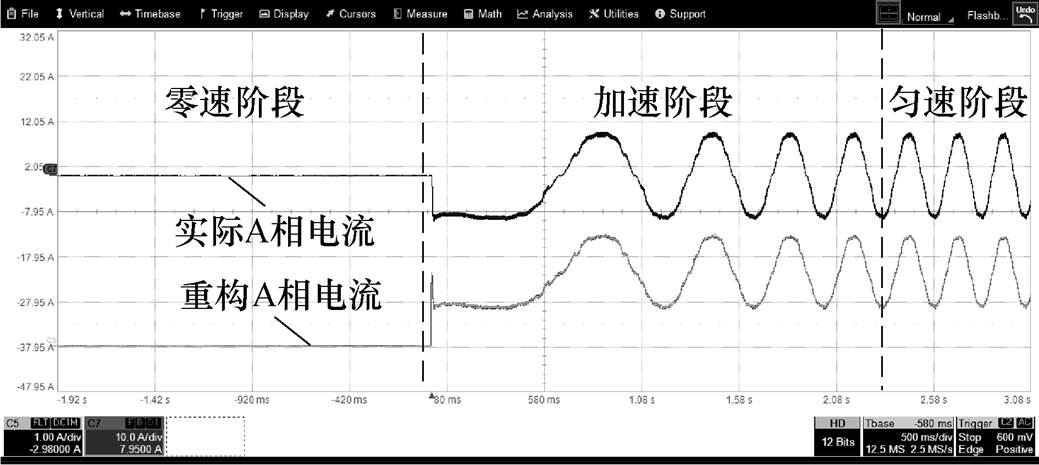
图19 电机起动过程中的A相电流波形
Fig.19 Waveforms of A phase current during start-up
在实际的电机控制系统中,重构电流能够准确地跟踪到实际电流的变化是至关重要的。实验中,通过在电机平稳运行时突然改变实际相电流,验证本文方法的动态性能。结果表明,该方法所重构出的相电流,能准确跟踪到实际电流的变化,电流突变时刻波形如图20所示。
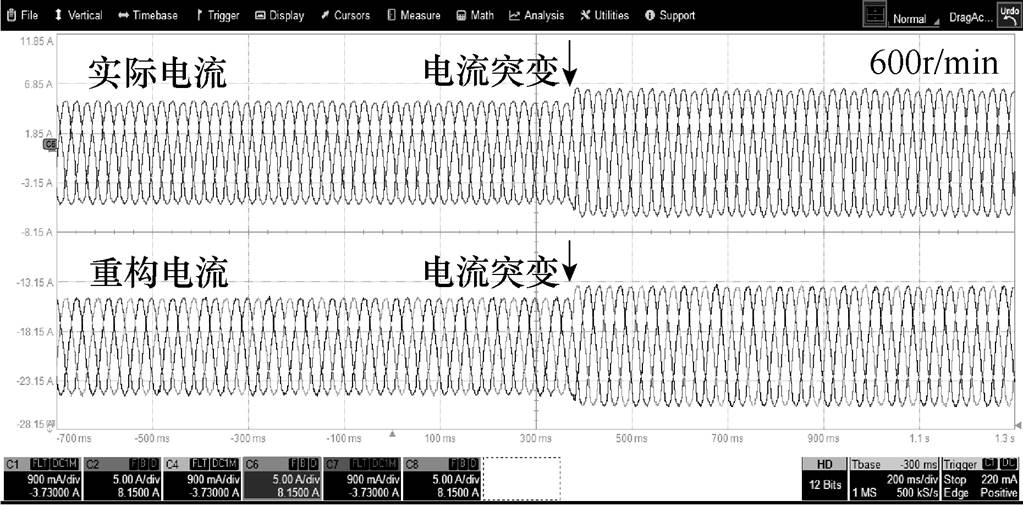
图20 电流突变时刻波形
Fig.20 Waveforms of currents change suddenly
图21为低调制区的重构电流与实际电流波形,调制度m=0.15,转速r=150r/min。可以看到,相电流能够被较好地重构,但由于两个电压矢量的插入,三相电流畸变率有所增加。
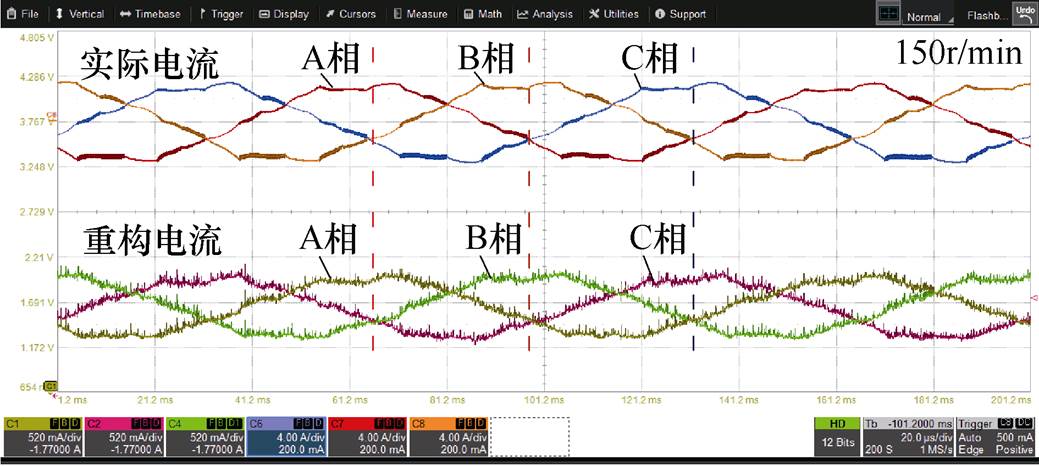
图21 低调制区的重构电流与实际电流波形
Fig.21 Waveforms of reconstructed currents and true phase currents in low modulation region
为了更直观地评价SSVPWM方式的实际优劣性,设定转速为600r/min,在相同的直流母线采样和相电流重构策略下,分别使用SVPWM和SSVPWM两种调制方式获得三相重构电流波形,并对重构电流波形进行谐波分析和总谐波畸变率(Total Harmonic Distortion, THD)计算。
重构电流谐波如图22所示。图22a给出了传统SVPWM方式下,直流母线采样重构电流波形以及谐波分析。可以看出,该调制方式下的重构电流谐波含量很高,高频谐波超过了14%。在图19b中,SSVPWM方式下的三相重构电流谐波含量明显减少,高频谐波含量衰减到不足3%。

图22 重构电流谐波
Fig.22 Harmonics of reconstructed currents
重构电流畸变率如图23所示。图23a和图23b分别是采用SVPWM和SSVPWM方式时的三相重构电流畸变率。可知,SVPWM能够在多数区域重构出相电流,但在不可观测区域失真较为严重,三相重构电流的畸变率均在4%左右。SSVPWM方法的三相重构电流畸变率相对较低,平均只有1.35%,与第2节的理论分析基本一致。
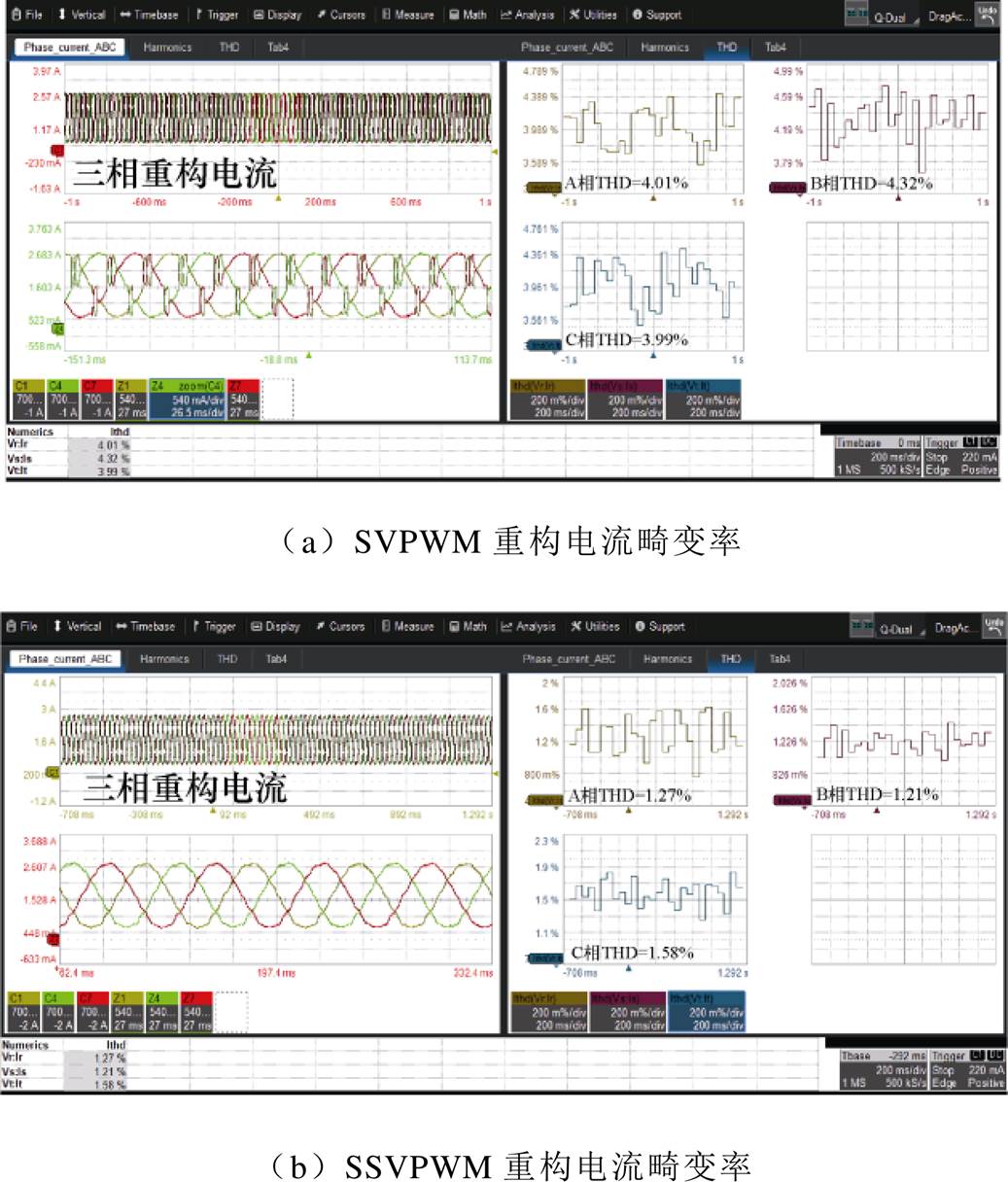
图23 重构电流畸变率
Fig.23 THD of reconstructed currents
本文针对传统SVPWM无法兼容直流母线电流采样的问题,提出一种直流母线电流采样电压空间矢量脉冲宽度调制方法。通过实验验证,所提出方法的有效性体现在:
1)SSVPWM方法不改变原PWM的占空比和对称性,保持了SVPWM良好的动静态特性,可实现不可观测区域三相电流的重构,同时减少了谐波的引入和畸变率的增加。
2)SSVPWM方法有效地避免了由于死区时间、运放摆率等因素引起的电流延时以及振荡所导致电流采样不准确的问题,提升了电流采样精度。
3)SSVPWM方法的电流采样误差低于2%、相电流高次谐波含量低于3%、三相电流畸变率低于1.6%,为高性能矢量控制提供了精确的电流测量。
参考文献
[1] Yan Hao, Xu Yongxiang, Zhao Weiduo, et al. DC drift error mitigation method for three-phase current reconstruction with single hall current sensor[J]. IEEE Transactions on Magnetics, 2019, 55(2): 1-4.
[2] Huang Yingliang, Xu Yongxiang, Zhang Wentao, et al. The hybrid RPWM technique based on modified SVPWM to reduce the PWM acoustic noise[J]. IEEE Transactions on Power Electronics, 2019, 34(6): 5667-5674.
[3] Lu Haifeng, Cheng Xiaomeng, Qu Wenlong, et al. A three-phase current reconstruction technique using single DC current sensor based on TSPWM[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1542-1550.
[4] Kim H, Jahns T M. Phase current reconstruction for AC motor drives using a DC link single current sensor and measurement voltage vectors[J]. IEEE Transa- ctions on Power Electronics, 2006, 21(5): 1413- 1419.
[5] Kim H, Jahns T M. Current control for AC motor drives using a single DC-link current sensor and measurement voltage vectors[J]. IEEE Transactions on Industry Applications, 2006, 42(6): 1539-1547.
[6] Xu Yongxiang, Yan Hao, Zou Jibin, et al. Zero voltage vector sampling method for PMSM three- phase current reconstruction using single current sensor[J]. IEEE Transactions on Power Electronics, 2017, 32(5): 3797-3807.
[7] 谷明月, 何媛媛. 基于半PWM移相的单电阻电流重构策略研究[J]. 微电机, 2019, 52(6): 62-66.
Gu Mingyue, He Yuanyuan. Research on single-shunt current sensing method based on half PWM phase shift[J]. Micromotors, 2019, 52(6): 62-66.
[8] 陈小波, 黄文新, 胡育文, 等. 变频器单电阻电流采样及相电流重构方法[J]. 电气传动, 2010, 40(8): 3-6.
Chen Xiaobo, Huang Wenxin, Hu Yuwen, et al. Single resistor current sensing and reconstruction method for phase currents in inverters[J]. Electric Drive, 2010, 40(8): 3-6.
[9] Zhu Jiahui, Cheng Qiang, Yang Bin, et al. Experi- mental research on dynamic voltage sag compensation using 2G HTS SMES[J]. IEEE Transactions on Applied Superconductivity, 2011, 21(3): 2126-2130.
[10] Gu Yikun, Ni Fengli, Yang Dapeng, et al. Switching- state phase shift method for three-phase-current reconstruction with a single DC-link current sensor[J]. IEEE Transactions on Industrial Electronics, 2011, 58(11): 5186-5194.
[11] 王帆, 陈阳生. 不同PWM模式下交流电机单电阻三相电流采样的研究[J]. 机电工程, 2013, 30(5): 585-590.
Wang Fan, Chen Yangsheng. Research on phase current reconstruction for AC motor based on different PWM mode[J]. Journal of Mechanical & Electrical Engineering, 2013, 30(5): 585-590.
[12] 高强, 刘桂花, 王卫, 等. 一种永磁同步压缩机三相电流重构方法[J]. 电机与控制学报, 2009, 13(2): 267-271.
Gao Qiang, Liu Guihua, Wang Wei, et al. Method to three-phase current reconstruction of PMSM com- pressor[J]. Electric Machines and Control, 2009, 13(2): 267-271.
[13] Lai Y S, Lin Y K, Chen C W. New hybrid pulse width modulation technique to reduce current distortion and extend current reconstruction range for a three-phase inverter using only DC-link sensor[J]. IEEE Transa- ctions on Power Electronics, 2013, 28(3): 1331- 1337.
[14] 李帅, 孙立志, 刘兴亚, 等. 永磁同步电机电流谐波抑制策略[J]. 电工技术学报, 2019, 34(增刊1): 87-96.
Li Shuai, Sun Lizhi, Liu Xingya, et al. Current harmonics suppression strategies of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 87-96.
[15] Ge Junjie, Zhao Zhengming, Yuan Liqiang, et al. Direct power control based on natural switching surface for three-phase PWM rectifiers[J]. IEEE Transactions on Power Electronics, 2015, 30(6): 2918-2922.
[16] 魏海峰, 陆彦如, 江廷宇, 等. 考虑非观测区补偿的永磁同步电机单电阻采样重构[J]. 电工技术学报, 2018, 33(12): 2695-2702.
Wei Haifeng, Lu Yanru, Jiang Tingyu, et al. Single resistor sampling reconstruction of permanent magnet synchronous motor considering non-observation area compensation[J]. Transactions of China Electro- technical Society, 2018, 33(12): 2695-2702.
[17] Song Shoujun, Xia Zekun, Zhang Zhihui, et al. Control performance analysis and improvement of a modular power converter for three-phase SRM with Y-connected windings and neutral line[J]. IEEE Transactions on Industrial Electronics, 2016, 63(10): 6020-6030.
[18] Wang Chuyang, Xiao Lan, Wang Chujiao, et al. Analysis of the unbalance phenomenon caused by the PWM delay and modulation frequency ratio related to the CPS-PWM strategy in an MMC system[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3067-3080.
[19] 闫朝阳, 张喆, 李建霞, 等. 单相高频链逆变器的解结耦单极性移相调制及其死区优化[J]. 电工技术学报, 2018, 33(6): 1337-1346.
Yan Zhaoyang, Zhang Zhe, Li Jianxia, et al. The uni-polarity phase-shifted modulation strategy for single-phase high-frequency link inverter based on de-re-coupling idea and dead time optimization[J]. Transactions of China Electrotechnical Society, 2018, 33(6): 1337-1346.
[20] 刘若平, 屠卿瑞, 李银红, 等. 适用于交流保护整定的MMC-HVDC接入母线故障等效模型[J]. 电力系统自动化, 2019, 43(18): 145-155.
Liu Ruoping, Tu Qingrui, Li Yinhong, et al. Equivalent model of MMC-HVDC for AC protection setting with access bus fault[J]. Automation of Electric Power Systems, 2019, 43(18): 145-155.
[21] 熊成林, 刁飞, 吴瑕杰, 等. 单相变换器简化多电平SVPWM算法[J]. 电机与控制学报, 2019, 23(4): 56-66.
Xiong Chenglin, Diao Fei, Wu Xiajie, et al. A simplified multilevel space vector pulse-width modulation algorithm for single-phase converter[J]. Electric Machines and Control, 2019, 23(4): 56-66.
[22] 倪瑞政, 李庭, 陈杰, 等. 一种脉冲式死区补偿方法的研究[J]. 电工技术学报, 2019, 34(增刊2): 553- 559.
Ni Ruizheng, Li Ting, Chen Jie, et al. Research on a pulse dead zone compensation method[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(S2): 553-559.
A Compatible SVPWM Method for DC Bus Current Sampling
Abstract Aiming at the voltage space vector pulse width modulation problem of DC bus sampling motor control system, the current sampling mechanism of the traditional SVPWM method is analyzed, and the mechanism of the unobservable region in the DC bus sampling system is revealed. By defining the concept of minimum sampling time, the unobservable area of DC bus sampling system is divided accurately, and then the DC bus sampling voltage space vector pulse width modulation method (SSVPWM) and its current reconstruction strategy are proposed by inserting measurement vector and compensation vector. Finally, the experimental results show that the current sampling error is less than 2%, the higher harmonic content of the phase current is lower than 3%, and the THD of the three-phase current is lower than 1.6%, which provides accurate current for high performance vector control.
keywords:Pulse width modulation, DC bus current sampling, minimum sampling time, phase current reconstruction, sampling voltage space vector pulse width modulation (SSVPWM) method
中图分类号:TM341
DOI: 10.19595/j.cnki.1000-6753.tces.191854
国家自然科学基金青年项目(61803345)和河南省科技攻关项目(202102210303)资助。
收稿日期 2019-12-31
改稿日期 2020-09-24
申永鹏 男,1985年生,博士,副教授,研究方向为电动汽车动力系统驱动与控制、能量管理与优化。E-mail: shenyongpeng@zzuli.edu.cn
郑竹风 男,1993年生,硕士研究生,研究方向为永磁同步电机控制。E-mail: zhufeng_zzuli@163.com(通信作者)
(编辑 崔文静)