图1 无电感升压拓扑驱动的无刷直流电机系统
Fig.1 Brushless DC motor system driven by non-inductive Boost topology
摘要 该文利用MOSFET、二极管和电容设计一种结构简单的升压拓扑结构,用以驱动无刷直流电机。该结构无需电感,有利于减小驱动系统的成本与体积。结合升压拓扑的输出方式与无刷直流电机的运行方式,该文构建保证驱动系统正常工作的四种开关矢量,并进一步提出一种基于升压拓扑的无刷直流电机电流控制策略。在无刷直流电机的换相区及非换相区,通过选择合适的矢量作用即可实现平稳的电流控制。此外,在换相区采用统一的控制方式可以有效地抑制换相转矩波动,无需根据转速区间切换控制策略。
关键词:无刷直流电机 升压拓扑 电流控制 换相转矩波动
无刷直流电机由于功率密度高、体积小、结构简单等优势被广泛应用于电动汽车、工业控制及航空航天等领域[1-4]。然而无刷直流电机在运行过程中存在换相转矩波动,严重的换相转矩波动会导致电机产生噪声、振动,制约了其在高精度场合的应用[5-7]。
国内外学者针对无刷直流电机的换相转矩波动问题展开了一系列研究。文献[8]分析了换相转矩波动形成原因,并指出可以通过维持非换相相电流平稳来抑制换相转矩波动。文献[9]应用脉冲宽度调制(Pulse Width Modulation, PWM)方式抑制换相转矩波动,该方法在电机的低速区间需要调制非换相相,在电机的高速区间需要调制关断相。文献[10]采用坐标变换的方法,在两相静止坐标系下分析了无刷直流电机的换相过程,并设计了抑制换相转矩波动的控制策略。
上述方法对于换相转矩波动抑制有明显效果,但是需要依据电机的低速区间和高速区间切换控制策略。对此,文献[11]提出一种基于有限集模型电流预测的换相转矩波动抑制方法。该方法通过预设的价值函数来选择应用于每个控制周期的最优开关状态。文献[12]对非换相区和换相区设计了合理的主辅矢量表,在每个控制周期通过主辅矢量的共同作用抑制换相转矩波动。
以上方法虽然无需切换控制策略,然而受限于逆变器直流侧电压,在电机运行的高速区间,以上方法本质上仍然是通过减慢关断相电流变化速率进而实现换相转矩波动抑制,这将延长不期望的换相过程时间。
对此有学者提出了添加升压DC-DC变换器的方法,通过直流调压技术为无刷直流电机提供换相时刻所需的高电压,从而在不增加换相时间的前提下抑制换相转矩波动。文献[13]将Sepic变换器与开关电路相结合,在电机非换相区选择直流电源输出,在换相区选择Sepic变换器调节的电压输出。文献[14]采用Z源变换器作为前置拓扑,通过引入直通矢量进行升压,该方法可使用低于电机额定电压的直流电源,从而提高电源电压利用率。文献[15]基于二极管辅助升降压变换器设计控制策略,该策略能在抑制换相转矩波动的基础上避免开关器件电压应力的增加。但是以上拓扑结构所需的功率器件较多,尤其是额外电感促使系统体积和成本增加。
本文设计了一种新型升压拓扑结构,该拓扑仅包含一个二极管、一个MOSFET及一个电容,无需额外的电感及其他功率器件,因此驱动系统的体积与成本将有所降低。针对新型升压拓扑驱动的无刷直流电机系统,本文分析了不同开关矢量作用对电机相电流及电容电压变化率的影响,进一步设计了基于升压拓扑结构的无刷直流电机电流控制策略,该策略能有效地抑制无刷直流电机的换相转矩波动,并且不需要根据电机的转速范围进行控制方式的切换。
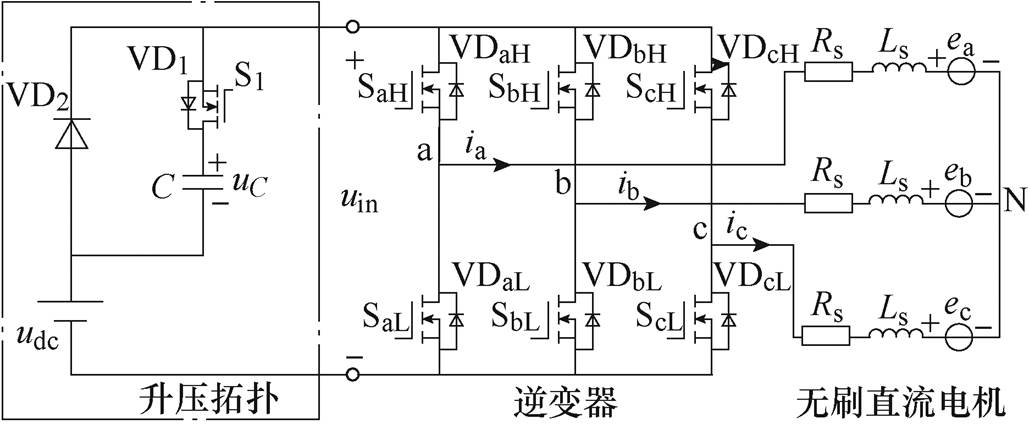
本文所提升压拓扑驱动的无刷直流电机系统如图1所示,包括升压拓扑、逆变器和无刷直流电机。
图1 无电感升压拓扑驱动的无刷直流电机系统
Fig.1 Brushless DC motor system driven by non-inductive Boost topology
升压拓扑主要由电容C、二极管VD2及MOSFET构成。SaH、SaL、SbH、SbL、ScH、ScL为三相逆变器的六个开关管,uin为逆变器直流侧电压。Rs与Ls分别为无刷直流电机的相电阻和相电感,ek、ik(k=a, b, c)分别为三相绕组的相反电动势和相电流,N为电机三相绕组中性点。
设电源电压udc等于无刷直流电机额定电压,根据负载电流的方向,升压拓扑共存在三种输出 方式。
当负载侧需要正向电流时,即iin>0,根据S1不同开关状态,升压拓扑存在如图2所示的三种输出方式。
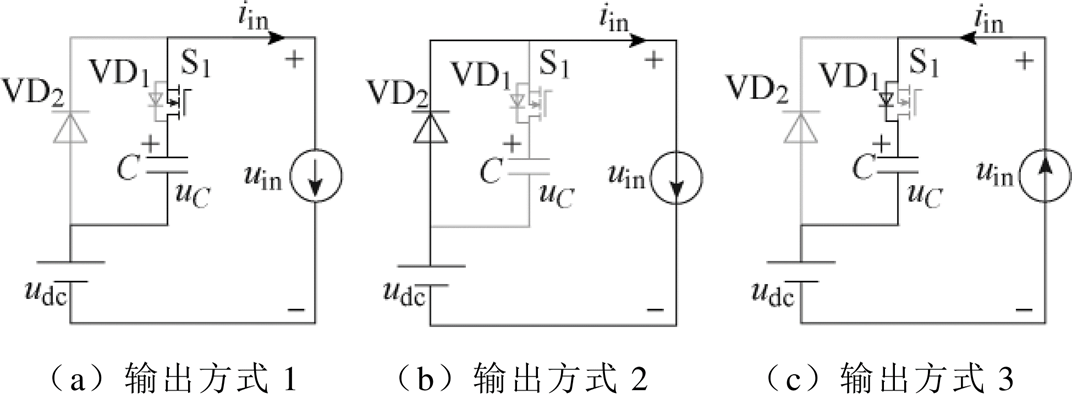
图2 升压拓扑的三种输出方式
Fig.2 The three output modes of Boost topology
输出方式1:如图2a所示,若开关S1导通,则VD2由于承受反向电压-uC而截止,此时电源与电容C共同为负载供电,直流侧电压uin=udc+uC。
输出方式2:如图2b所示,若开关S1关断,则电源单独为负载供电,此时直流侧电压uin=udc。
当负载侧提供反向电流时,即iin<0,升压拓扑的输出方式如图2c所示,记作输出方式3。此时,电流iin为电容C与电源充电,直流侧电压uin= udc+uC。
无刷直流电机理想相反电动势及相电流波形如图3所示,图中,qe为电角度,相反电动势幅值E=kew,其中,ke为反电动势系数,w 为机械角速度,依据电机转子位置将电周期分为六个扇区(用编号Ⅰ~Ⅵ表示)。
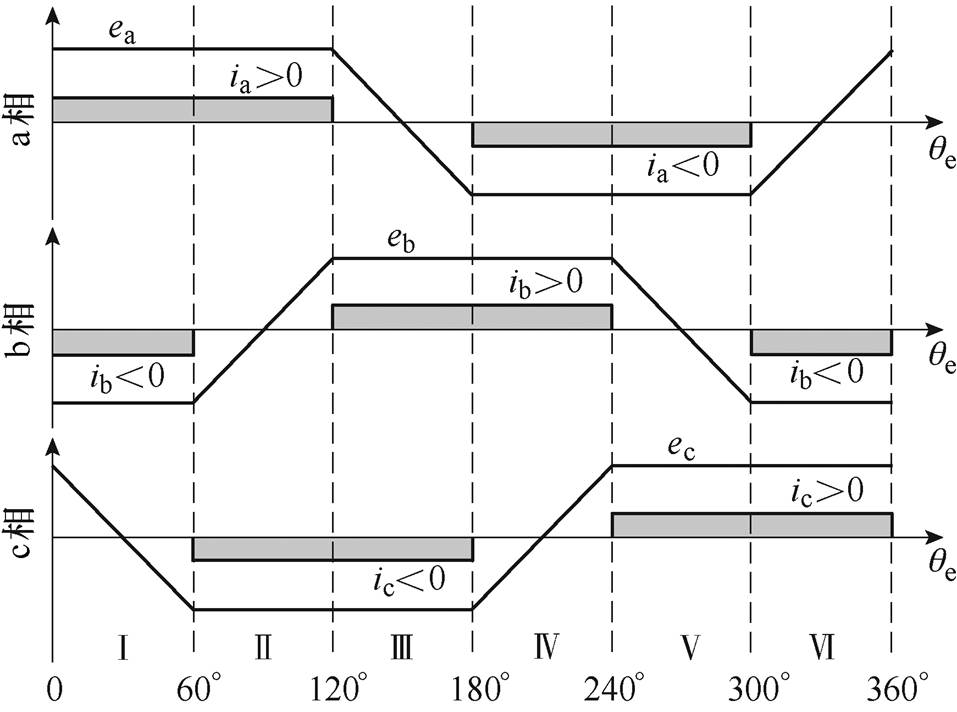
图3 无刷直流电机理想相反电动势及相电流波形
Fig.3 Ideal phase back EMF and phase current waveforms
无刷直流电机通常采用两两导通的三相六步换相驱动方式,即只对其中两相绕组通电,第三相绕组悬空。根据相电流方向,三相绕组可被定义为正导通相p、负导通相n和非导通相o(p, n, oÎ{a, b, c})。各扇区内电机运行模式可表示为p+n-,且不同扇区内p和n取值不同。如图3所示,例如在扇区Ⅰ内,电机为ab两相导通,且p=a, n=b。
本节将结合所提出的升压拓扑及无刷直流电机运行原理设计能够保证电机正常运行的开关矢量。
不同矢量作用下的等效电路如图4所示。通过控制逆变器p相上桥臂开关管SpH以及n相下桥臂开关管SnL的通断来实现对电机相电流的控制,根据SpH、SnL和S1的开关状态,构建以下四种开关矢量:
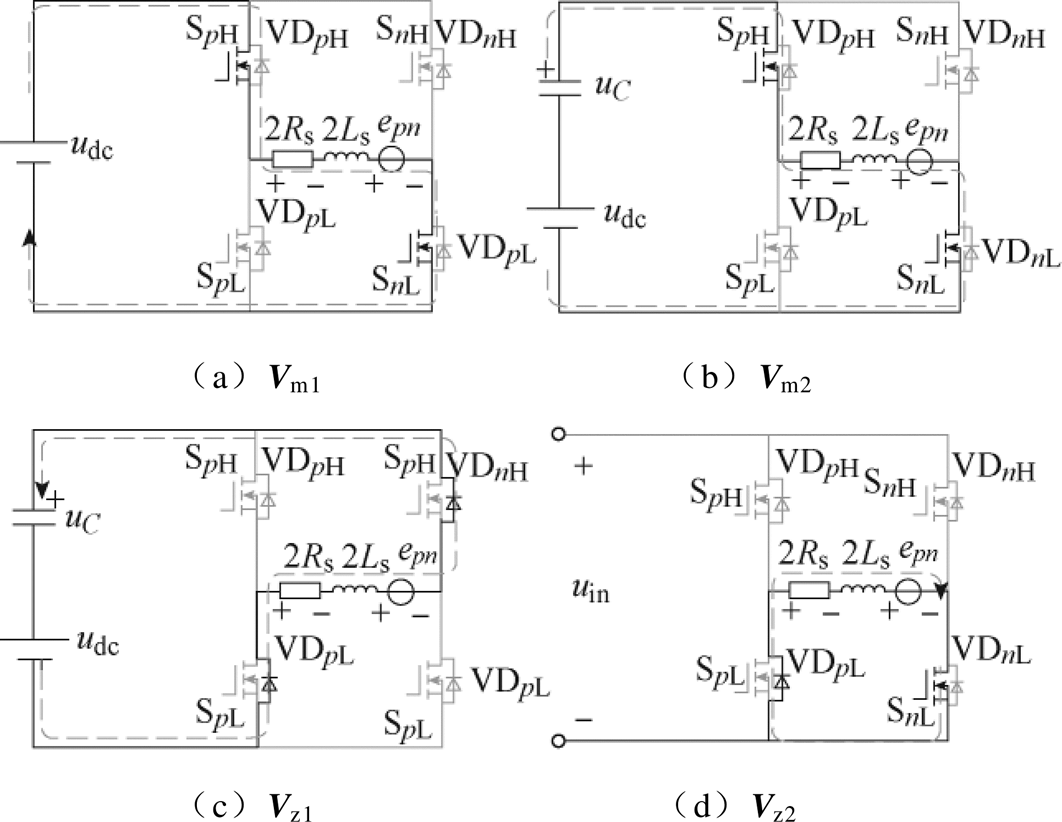
图4 不同矢量作用下的等效电路
Fig.4 Equivalent circuit under different vectors
(1)当开关管SpH与SnL导通,S1关断时,电源单独为电机供电,如图4a所示,并将该开关状态对应的开关矢量记作Vm1。
(2)当开关SpH、SnL与S1导通时,电源与电容共同为电机供电,如图4b所示,并将该开关状态对应的开关矢量记作Vm2。此时由于电容输出能量,电容电压uC不断降低。
(3)当开关管SpH与SnL关断时,电机相电流通过VDnH和VDpL续流,将对电容与电源充电,如图4c所示,并将该开关状态对应的开关矢量记作Vz1。
(4)当开关管SpH或者SnL关断时,电机不吸收能量。如SpH关断,相电流通过VDpL和SnL续流,如图4d所示,将该开关状态所对应的开关矢量记作Vz2。
在无刷直流电机进行电流换相的过程中,由于绕组电感的存在,电流无法突变,三相绕组均有电流流过,此阶段称作换相区。三相绕组在换相区可定义为:开通相x、非换相相y和关断相z(x, y, zÎ{a, b, c})。
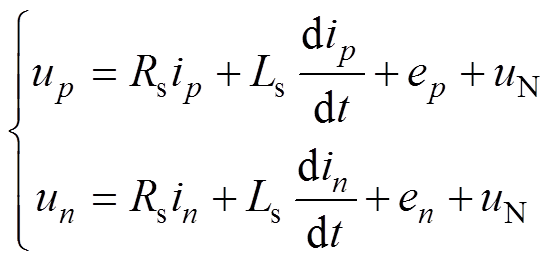
换相区内电机的三相绕组端电压方程为
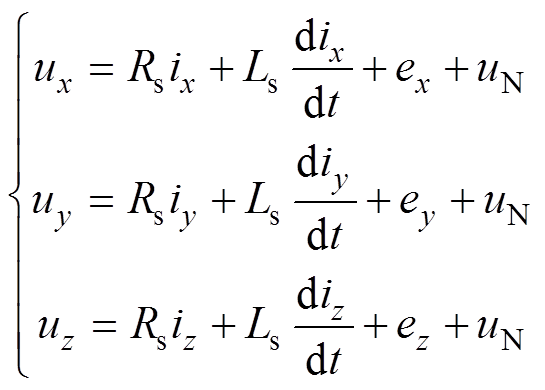 (1)
(1)式中,uN为电机中性点电压;ik、ek、uk(k=x, y, z)分别为换相区内三相绕组的相电流、相反电动势和端电压。换相区内电磁转矩Te为
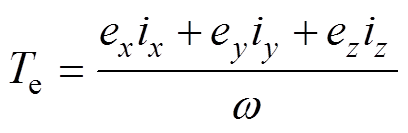 (2)
(2)
以Ⅱ、Ⅳ、Ⅵ扇区初始阶段进行负向电流换相为例分析,此时x对应负导通相n,y对应正导通相p,z对应非导通相o,即x=n,y=p,z=o。因换相时间较短,忽略关断相反电动势变化,即有-ex=ey= -ez=E。因定子绕组为星形联结,相电流满足ix+iy+ iz=0,将其代入式(2)得
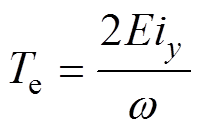 (3)
(3)因此维持非换相相电流平稳即可抑制换相转矩波动,据式(1)推得iy在一个控制周期内的变化率为
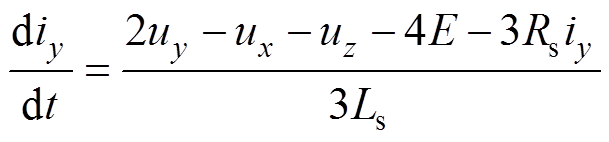 (4)
(4)
负向电流换相时不同矢量作用下的等效电路如图5所示。在换相区采用矢量Vm2和Vz2共同作用来维持非换相相电流平稳。在矢量Vm2作用下的等效电路如图5a所示,此时ux=0,uy=uin;在矢量Vz2作用下的等效电路如图5b所示,此时ux=0,uy=0。由于电流在换相过程不能突变,因此关断相电流iz通过上桥臂二极管VDzH进行续流,此时uz=uin。
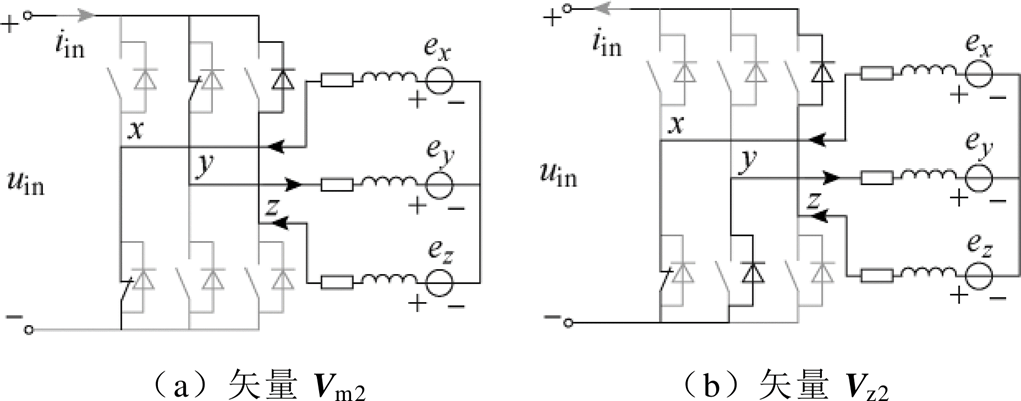
图5 负向电流换相时不同矢量作用下的等效电路
Fig.5 Equivalent circuit during negative current commutation
由于在进行负向电流换相时,非换相相y对应正导通相p,因此iy>0。结合不同矢量作用下的三相绕组端电压,推得非换相相电流变化率为
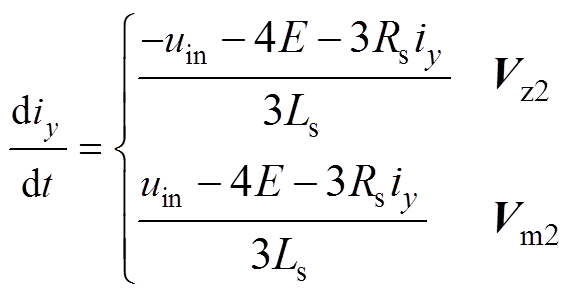 (5)
(5)观察式(5)可知,在矢量Vz2作用下,非换相相电流减小。在矢量Vm2作用下,非换相相电流的变化趋势取决于逆变器直流侧电压uin和4E+3Rsiy的大小关系。
在不添加升压拓扑时,uin=udc。当电机运行在高速区,即uin<4E+3Rsiy时,非换相相电流均减小,导致了换相转矩波动的出现。
当添加本文设计的升压拓扑后,在换相期间可以通过导通开关管S1将直流侧电压uin提高至udc+ uC,从而为抑制换相转矩波动提供了条件。通过控制电容电压uC维持在某一期望值 附近,使得udc+uC>4E+3Rsiy,即可有效地抑制换相转矩波动。
附近,使得udc+uC>4E+3Rsiy,即可有效地抑制换相转矩波动。
综上所述,在电机的换相区内,选择矢量Vm2或者Vz2作用实现电流控制。根据相电流的反馈值I与期望值 的大小关系,若I<,选择矢量Vm2作用;若I>,选择矢量Vz2作用。
的大小关系,若I<,选择矢量Vm2作用;若I>,选择矢量Vz2作用。
无刷直流电机导通两相绕组的端电压可表示为
 (6)
(6)由于相电流满足ip=-in>0,相反电动势满足ep= -en=E,代入式(6)可推得
 (7)
(7)
其中
式中,upn为导通两相线电压。在图4所示的各矢量作用下,导通两相线电压为
 (8)
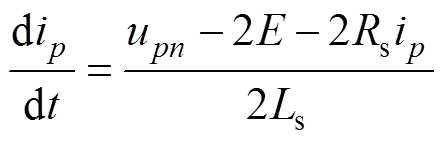
(8)结合式(7)和式(8),推得在各矢量作用下正导通相电流变化率为
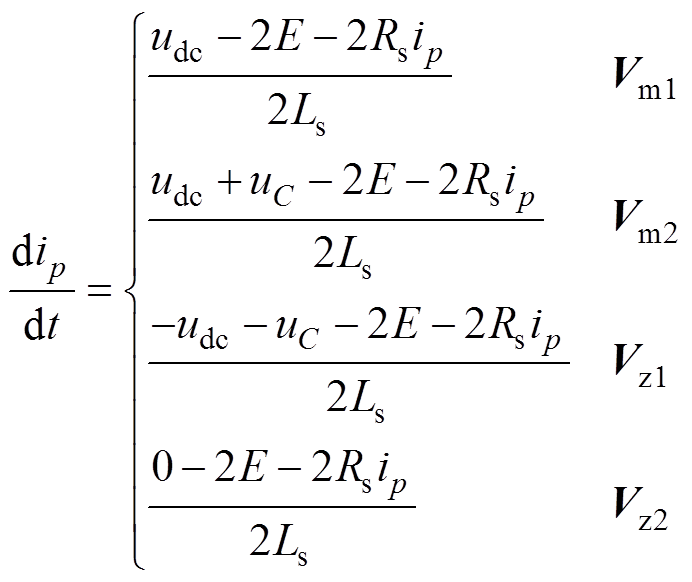 (9)
(9)
由式(9)可知,在矢量Vm1与Vm2作用下,相电流呈上升趋势。而在矢量Vz1与Vz2作用下,相电流呈下降趋势。此外,为保证换相转矩波动抑制效果,需要控制电容电压uC维持在某一期望值附近。因此在设计非换相区的矢量选取机制时,除了考虑电流变化率,还应兼顾电容电压的控制,当 uC<时,应对电容充电。
综上,根据相电流的反馈值I与期望值的大小关系,存在两种情况:
(1)若I<,相电流需增大,以Vm1或Vm2作为备选矢量。由于作用Vm2时电容释放能量导致uC下降,不利于换相转矩波动抑制,因此选择Vm1。
(2)若I>,相电流需减小,以Vz1或者Vz2作为备选矢量。进一步根据电容电压uC与期望值 的大小关系选择矢量,若uC<,作用Vz1以对电容充电;若uC≥,作用Vz2,不对电容充电。
的大小关系选择矢量,若uC<,作用Vz1以对电容充电;若uC≥,作用Vz2,不对电容充电。
图6为所提基于升压拓扑的电流控制策略的整体框图。首先根据换相信号选择换相区控制策略或者非换相区控制策略。依据滞环电流控制器的输出与电容电压uC,选择合适的矢量作用,矢量选择机制见表1。
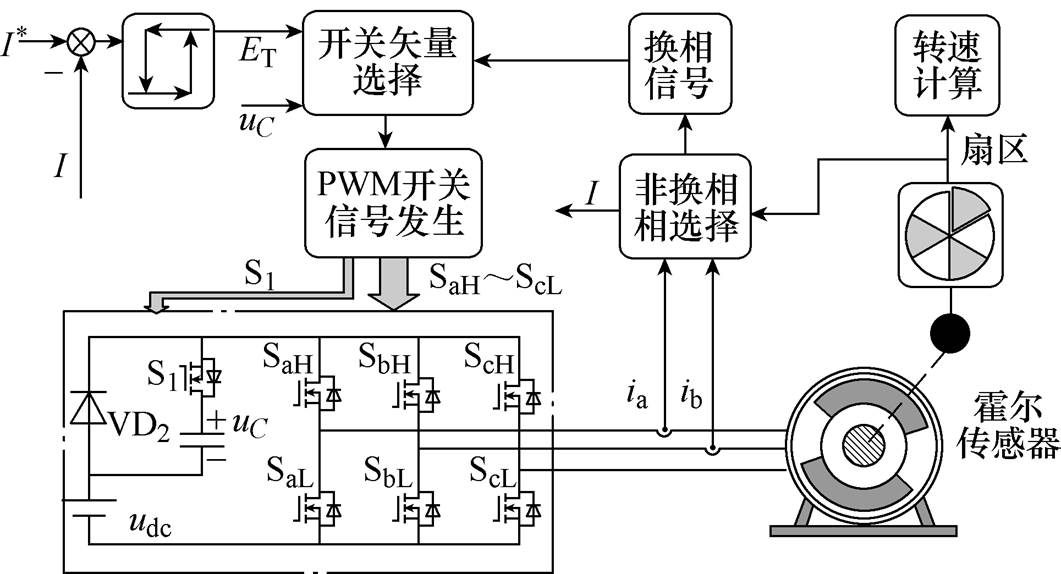
图6 基于升压拓扑的电流控制策略框图
Fig.6 Diagram of current control strategy based on Boost topology
表1 开关矢量选择机制
Tab.1 Switching vector selection mechanism
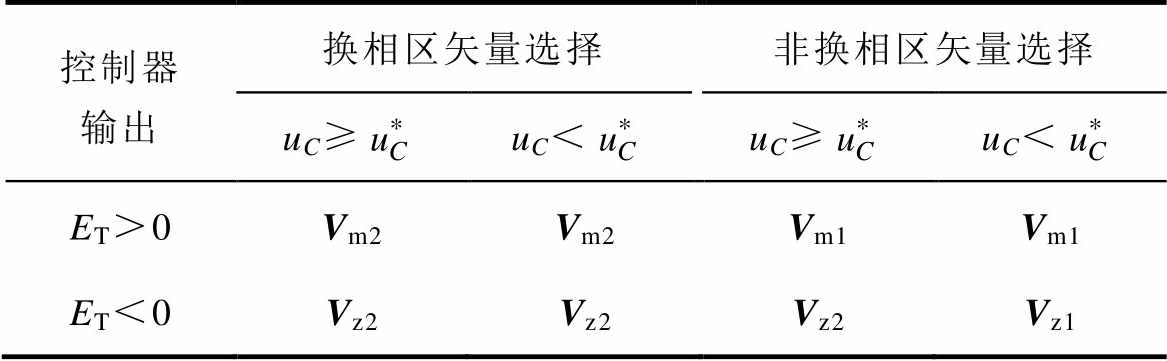
控制器输出换相区矢量选择非换相区矢量选择 uC≥uC<uC≥uC< ET>0Vm2Vm2Vm1Vm1 ET<0Vz2Vz2Vz2Vz1
表1中,ET为滞环电流控制器输出,ET>0表示相电流需上升,ET<0表示相电流需下降。
当处于换相区时,若ET>0,选择矢量Vm2作用;若ET<0,选择矢量Vz2作用。当处于非换相区时,若ET>0,选择矢量Vm1作用;若ET<0,进一步考虑uC与的关系,若uC≥,选择矢量Vz2作用,否则,选择矢量Vz1作用。
为了验证理论分析的正确性和提出方法的有效性,搭建实验平台如图7所示。负载由一台西门子1FT系列伺服电机提供,由一台Agilent N5767A直流电源供电,实验结果由一台YOKOGAWA DLM4058混合信号示波器记录。表2列出实验电机和升压拓扑参数。
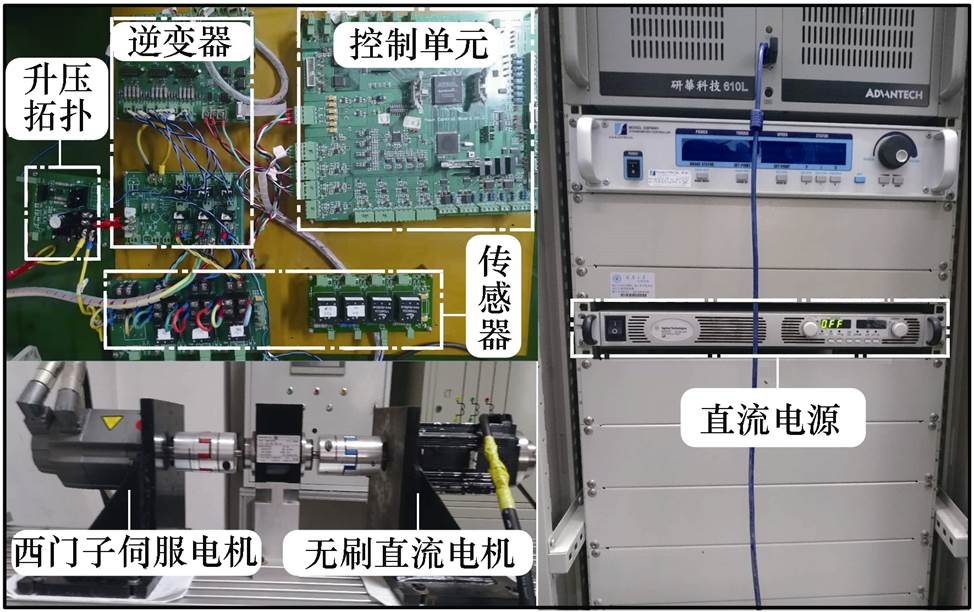
图7 实验平台
Fig.7 Experimental platform
由于电磁转矩与非换相相电流成比例关系,因此电磁转矩波形可由电流波形近似等价,将电流波动率IrT定义为
 (10)
(10)式中,Ihigh和Ilow分别为一段时间内非换相相电流的最大值和最小值。
表2 实验电机和升压拓扑参数
Tab.2 Parameters of the motor and Boost topology
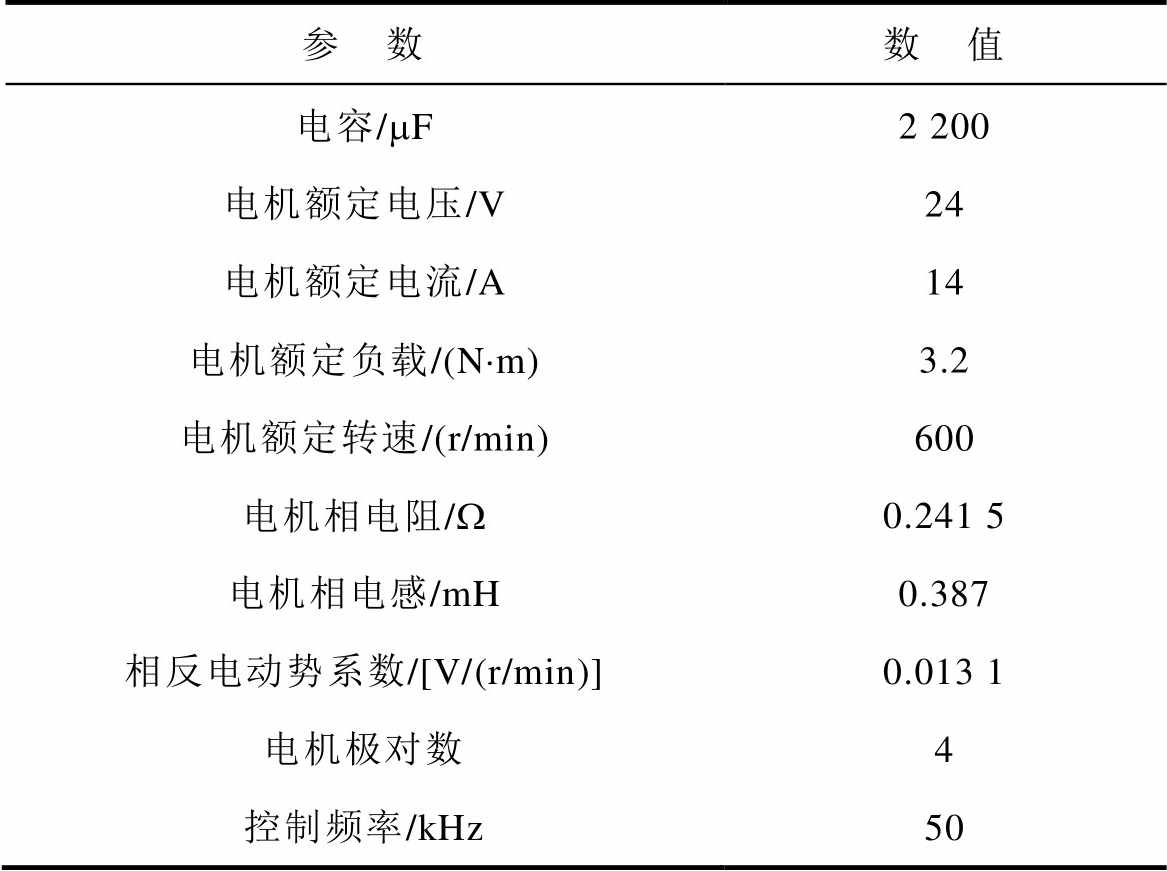
参 数数 值 电容/mF2 200 电机额定电压/V24 电机额定电流/A14 电机额定负载/(N×m)3.2 电机额定转速/(r/min)600 电机相电阻/W0.241 5 电机相电感/mH0.387 相反电动势系数/[V/(r/min)]0.013 1 电机极对数4 控制频率/kHz50
为验证本文提出方法能抑制电机高速区的换相转矩波动,首先让电机进行高速区实验,设定电机转速为500r/min,电机相电流期望值等于额定值14A,实验结果如图8所示。选择基于传统电压源逆变器的滞环电流控制策略进行实验对比,即仅使用矢量Vm1与Vz2。两种方法的滞环控制器环宽均设为0.02。图8a为传统方法实验结果,所示波形从上至下分别表示电机三相电流、当前作用的矢量、换相信号。观察三相电流可知,该工况下传统方法的非换相相电流波动率达到14.05%。图8b为本文提出方法的实验结果,为抑制换相转矩波动,需满足udc+uC>4E+3Rsiy,因此实验中设定无电感升压拓扑中的电容电压期望值=22V,上电之初电容电压值为0。当电流控制器需要选择零矢量作用时,由于电容电压低于给定值,因此选择能对电解电容充电的开关矢量Vz1作用,使得电容电压不断上升,直至达到期望值。波形从上至下分别表示电机三相电流、当前作用的矢量、电容电压、换相信号。观察三相电流可知,应用本文的控制方法可将非换相相电流波动率降低至5.2%。
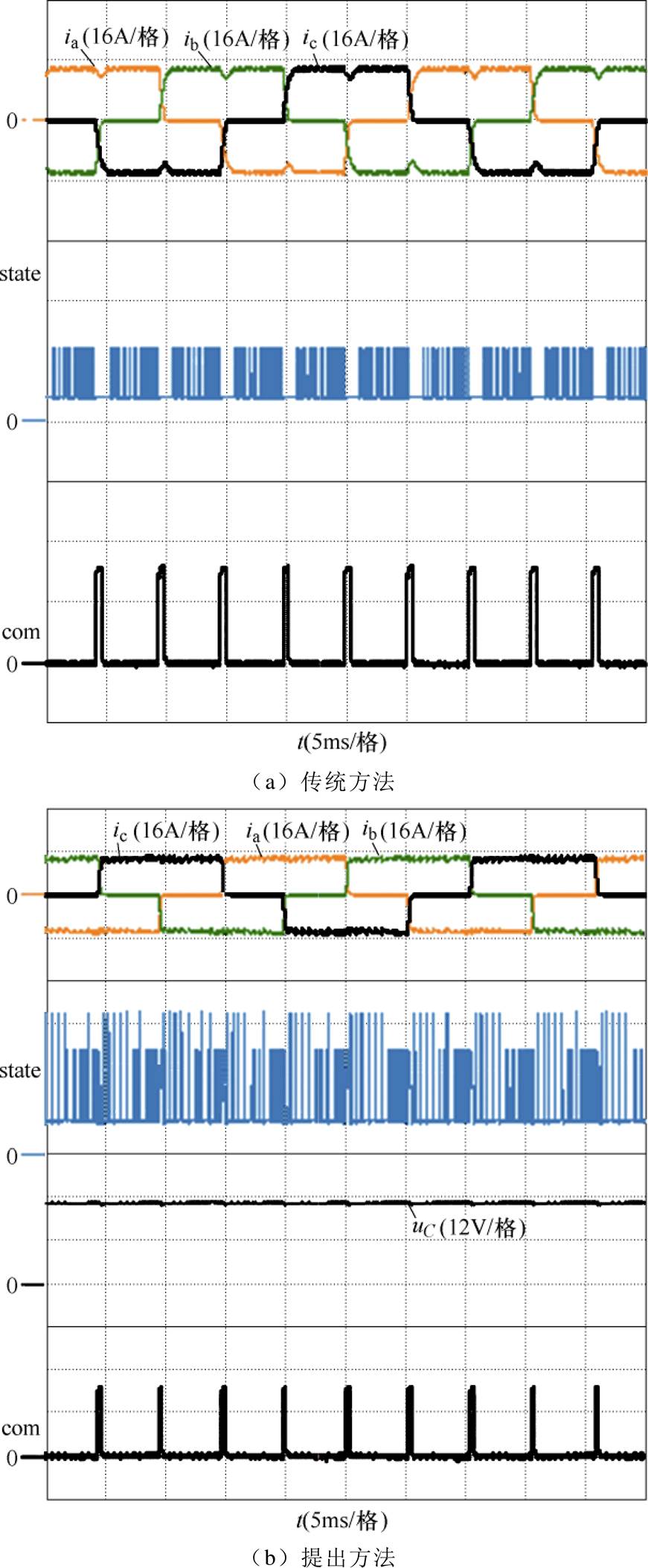
图8 n=500r/min,I=14A工况下的实验结果
Fig.8 Experimental results with n=500r/min and I=14A
图9a与图9b分别为图8a与图8b在换相区的放大波形。从图9a中可以看出,在该工况下,传统方法时在换相区内作用矢量Vm1无法阻止非换相相电流跌落,导致出现较大的换相转矩波动。从图9b中看出,本文提出方法在换相区可通过作用矢量Vm2阻止非换相相电流跌落,从而抑制换相转矩波动。此外,在无刷直流电机的非换相区,通过作用矢量Vz1可以对电容充电,使uC得以维持在期望值附近。
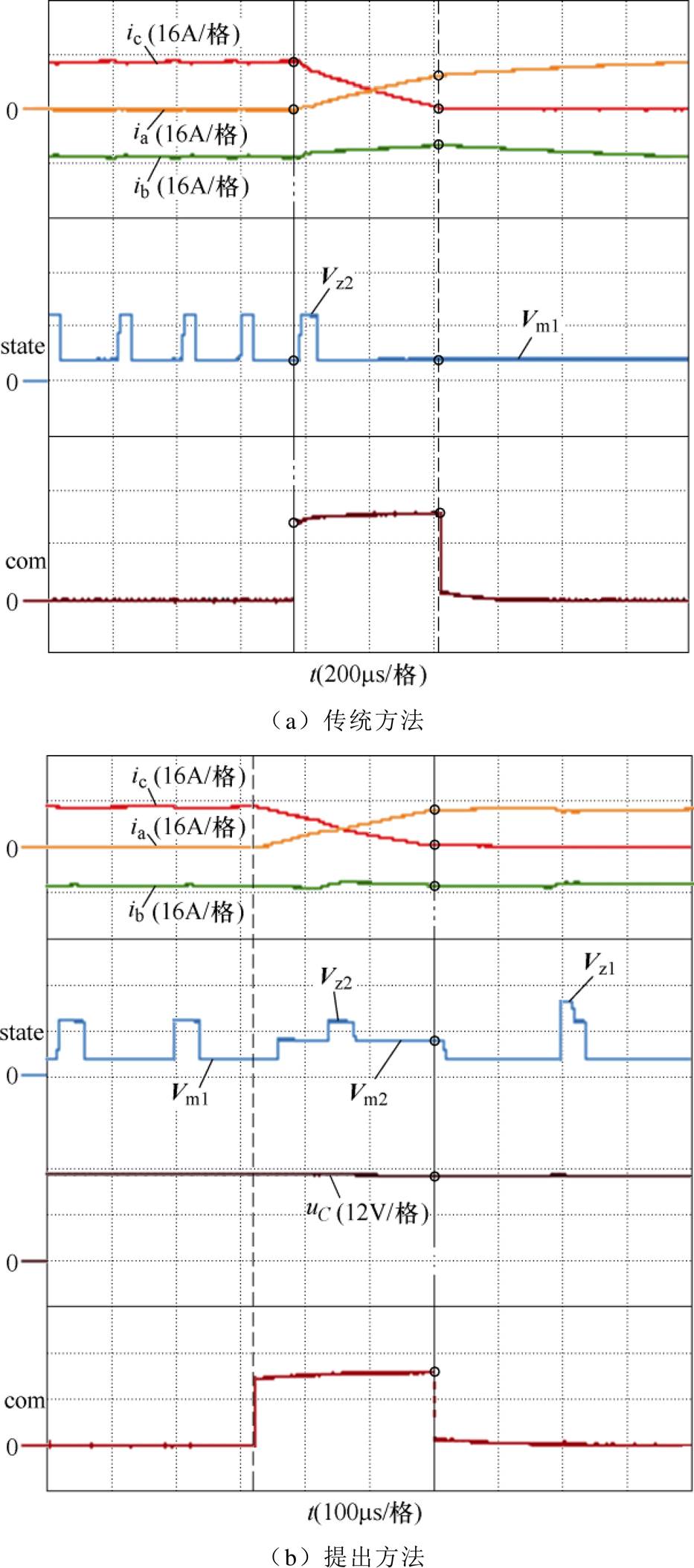
图9 n=500r/min,I=14A工况下的实验结果放大图
Fig.9 Enlarged view of experimental results with n=500r/min and I=14A
为验证本文提出方法在轻载工况下的性能,进行了电机转速、相电流分别为500r/min和7A工况下的实验,结果如图10所示。图10a与图10b分别为使用传统方法和本文提出方法的实验结果。图10 与图8的波形定义相同。由图10a可知,使用传统方法时,换相区内非换相电流波动率为17%,由图10b可知,使用本文提出方法后,换相区内非换相电流波动率下降至10.3%。
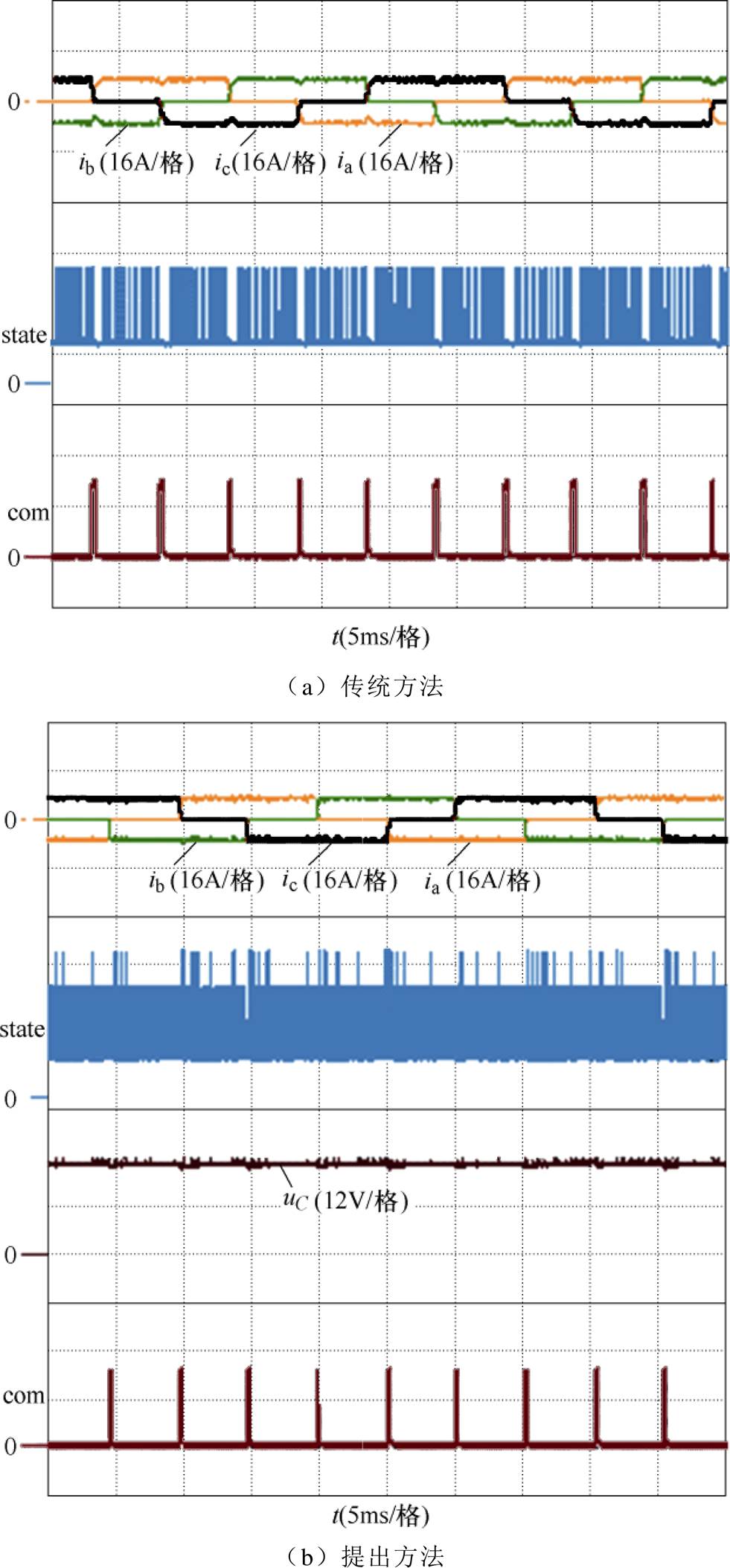
图10 n=500r/min,I=7A工况下的实验结果
Fig.10 Experiment results with n=500r/min and I=7A
为验证本文提出方法在低速区的控制效果,进行了电机转速、相电流分别为100r/min和14A工况下的实验。图11a与图11b分别为使用传统方法和本文提出方法的实验结果。图11a中,波形从上至下分别为三相电流及换相信号;图11b中,波形从上至下分别为三相电流、电容电压及换相信号。观察三相电流波形可知,两种方法作用下非换相电流波动率分别为4.8%及5.4%,因此在电机的低速工况下,两种方法均能有效地控制非换相电流保持平稳。进一步观察放大图可知,在传统方法作用下换相时间为550ms,使用本文提出方法后换相时间被缩短至250ms。
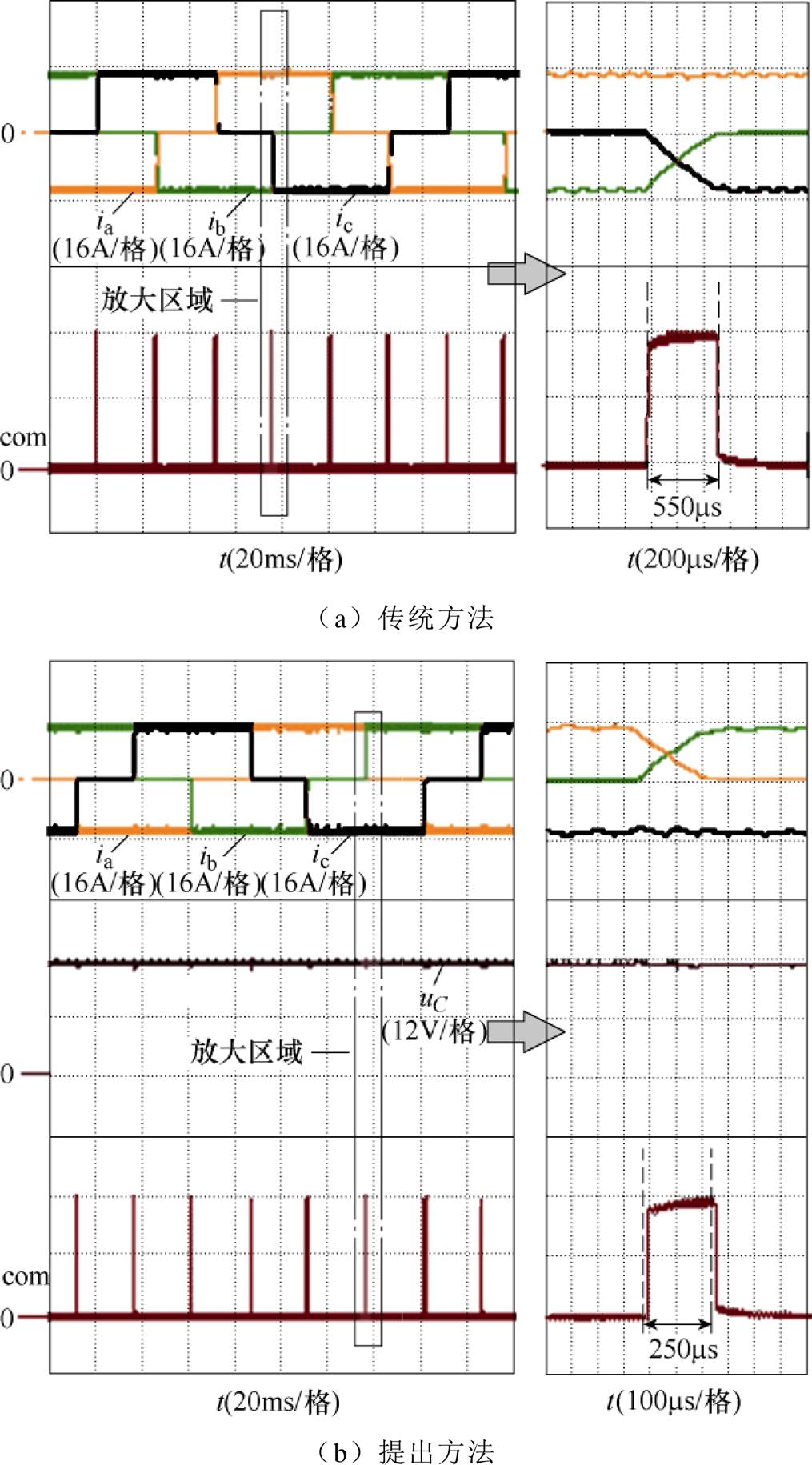
图11 n=100r/min,I=14A工况下的实验结果
Fig.11 Experiment results with n=100r/min and I=14A
为验证本文提出方法在电机加速过程的可行性,图12a给出相电流为14A,电机从50r/min加速至500r/min时的实验结果,各波形从上至下分别为电机转速、三相电流及电容电压。图12b为图12a的局部放大图。由图12b可知,在加速过程中,本文提出方法能够抑制换相转矩波动,并且使得升压拓扑的电容电压维持在期望值22V以上。
为验证本文提出方法在电机减速过程的可行性,图13a给出相电流为14A,电机从500r/min减速至50r/min时的实验结果,图13b为图13a的局部放大图。图13的波形定义与图12相同。由图13b可知,在减速过程中,本文提出方法同样能够抑制换相转矩波动,并使得升压拓扑的电容电压能够维持在期望值22V以上。
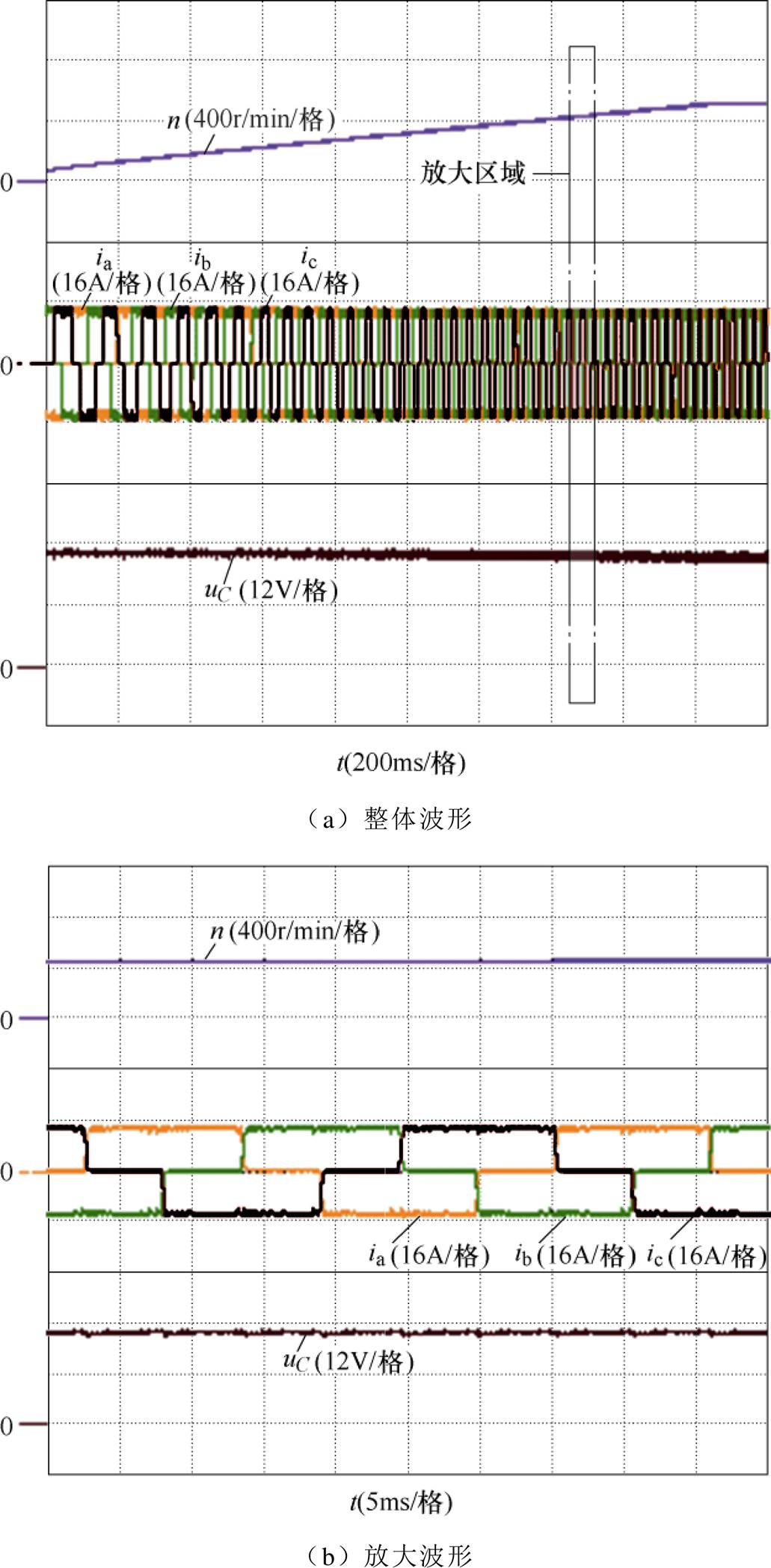
图12 电机加速过程的实验波形
Fig.12 Experimental waveforms of acceleration process
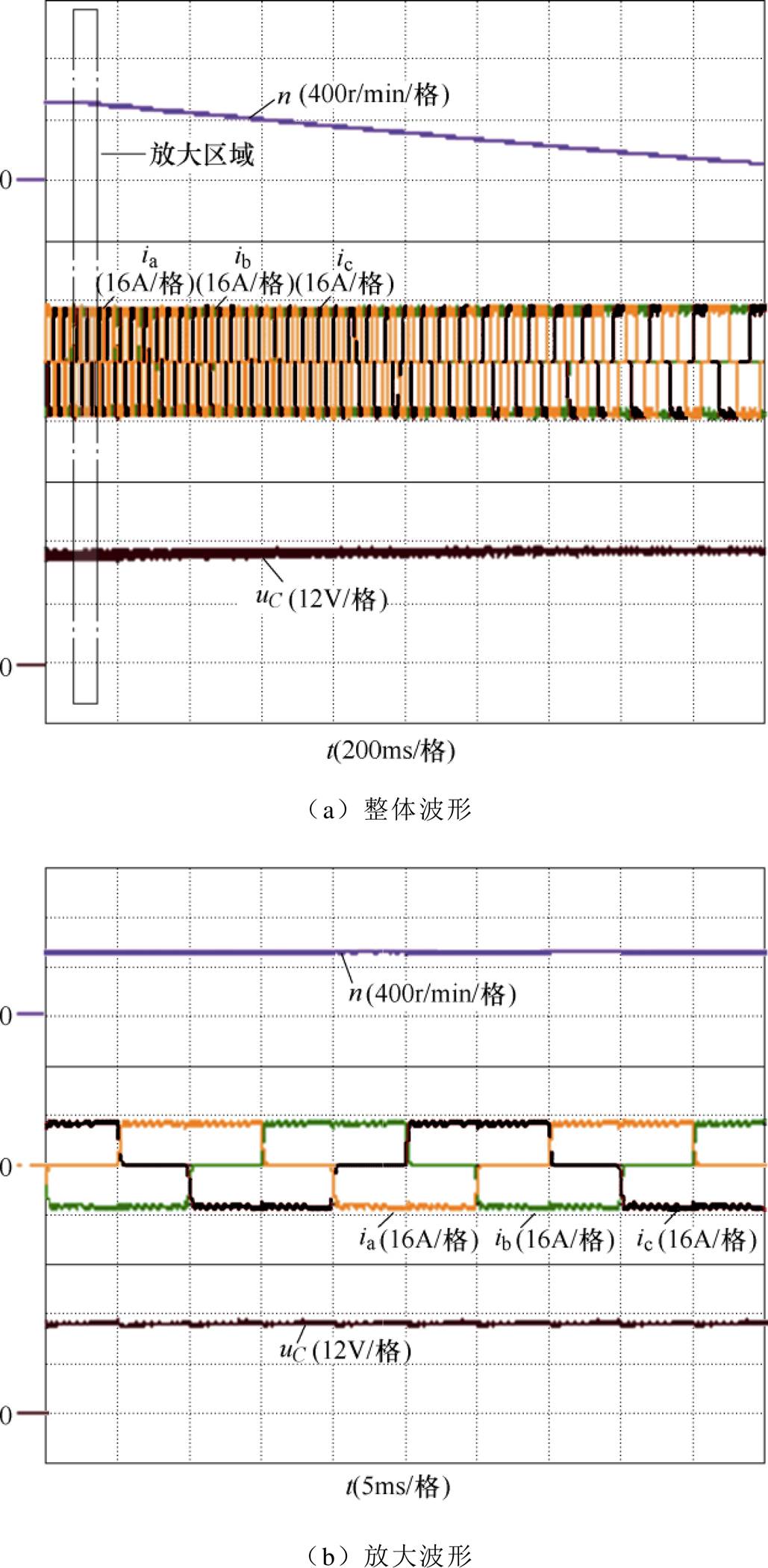
图13 电机减速过程的实验波形
Fig.13 Experimental waveforms of deceleration process
需要说明的是,使用本文提出方法时,升压拓扑中的电容会在电机换相区释放能量。因此本文提出方法需在非换相区通过作用矢量Vz1对电容充电,以将uC维持在期望值以上。伴随着转速上升,非换相区内矢量Vm1作用时间的占比不断增大,矢量Vz1可作用的时间占比不断减小,导致电容在非换相区内充入的能量不足以弥补在换相区内释放的能量,uC无法维持在期望值。综上,使用本文提出方法时,换相转矩波动可抑制的转速范围是受限的,对于本文使用的实验系统,该转速上限是500r/min,超过该转速后,换相转矩波动将无法有效抑制。然而,相比于不使用升压拓扑的传统方法,本文提出方法依然较大程度地拓宽了换相转矩波动可抑制的转速范围。若要解决该问题,可通过适当提升电源电压,以增加非换相区内矢量Vz1可作用的时长。对于本文所用实验系统,通过将电源电压从24V提升至27V,即可实现全速范围的换相转矩波动抑制。
本文利用电容、二极管和MOSFET设计了一种新型升压拓扑用以驱动无刷直流电机。通过对系统四种开关矢量的分析,进一步提出了一种基于升压拓扑的无刷直流电机电流控制策略。提出方法具有以下优势:
1)提出的升压拓扑结构简单,仅需一个MOSFET、电容和二极管,无需电感,因此系统的体积与成本均较小。
2)提出方法能为无刷直流电机提供换相时所需的高电压,从而有效地抑制无刷直流电机的换相转矩波动,提升电机运行的平稳性。
参考文献
[1] 周奇勋, 王坤, 刘娜, 等. BLDCM两相短路的四步换相容错运行方法[J]. 电工技术学报, 2019, 34(7): 65-74.
Zhou Qixun, Wang Kun, Liu Na, et al. A four-step commutation fault-tolerant operation method for two-phase short-circuit of BLDCM[J]. Transactions of China Electrotechnical Society, 2019, 34(7): 65-74.
[2] 张雷, 李航, 宋晓娜. 无刷直流电机直接转矩控制系统的优化设计[J]. 电机与控制学报, 2019, 23(10): 110-119.
Zhang Lei, Li Hang, Song Xiaona. An optimization design method of direct torque fuzzy control systems for brushless DC motors[J]. Electric Machines and Control, 2019, 23(10): 110-119.
[3] 林楠, 邱建琪, 史涔溦. PWM_ON_PWM调制方式的无刷直流电机转子位置检测方法[J]. 电机与控制学报, 2019, 23(3): 1-8.
Lin Nan, Qiu Jianqi, Shi Cenwei. Detection method of brushless DC motor rotor position in PWM_ON_ PWM modulation[J]. Electric Machines and Control, 2019, 23(3): 1-8.
[4] 陈炜, 刘会民, 谷鑫, 等. 基于反电动势函数的无刷直流电机无位置传感器控制方法[J]. 电工技术学报, 2019, 34(22): 4661-4669.
Chen Wei, Liu Huimin, Gu Xin, et al. A position sensorless control strategy for brushless DC motor based on the back-electromotive force function[J]. Transactions of China Electrotechnical Society, 2019, 34(22): 4661-4669.
[5] 杨建飞, 曹伟, 李德才, 等. 两相导通无刷直流电机直接转矩控制零电压矢量特性分析[J]. 电工技术学报, 2019, 34(23): 4948-4956.
Yang Jianfei, Cao Wei, Li Decai, et al. Analysis on zero voltage vector in two-phase conduction direct torque control of brushless DC motor[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(23): 4948-4956.
[6] 朱俊杰, 刘浩然, 蒋峰, 等. 无刷直流电机转矩脉动抑制系统的新型拓扑研究[J]. 电工技术学报, 2018, 33(17): 4060-4068.
Zhu Junjie, Liu Haoran, Jiang Feng, et al. A new topology research on torque ripple suppression system of brushless motor[J]. Transactions of China Elec- trotechnical Society, 2018, 33(17): 4060-4068.
[7] 姚绪梁, 林浩, 鲁光旭, 等. 一种基于线电压差积分的无位置传感器无刷直流电机换相误差检测和校正方法[J]. 电工技术学报, 2019, 34(22): 4651- 4660.
Yao Xuliang, Lin Hao, Lu Guangxu, et al. Line voltage difference integral method of commutation error adjustment for sensorless brushless DC motor[J]. Transactions of China Electrotechnical Society, 2019, 34(22): 4651-4660.
[8] 史婷娜, 李聪, 姜国凯, 等. 基于无模型预测控制的无刷直流电机换相转矩波动抑制策略[J]. 电工技术学报, 2016, 31(15): 54-61.
Shi Tingna, Li Cong, Jiang Guokai, et al. Model free predictive control method to suppress commutation torque ripple for brushless DC motor[J]. Transactions of China Electrotechnical Society, 2016, 31(15): 54-61.
[9] Song J H, Choy I. Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J]. IEEE Transactions on Power Electronics, 2004, 19(2): 312-319.
[10] 王培侠, 姜卫东, 王金平, 等. 基于电流滞环控制的无刷直流电机多状态换相转矩脉动抑制方法[J]. 电工技术学报, 2018, 33(22): 121-132.
Wang Peixia, Jiang Weidong, Wang Jinping, et al. A current hysteresis control method for brushless DC motor in multi-state with commutation torque ripple reduction[J]. Transactions of China Electrotechnical Society, 2018, 33(22): 121-132.
[11] Xia Changliang, Wang Yingfa, Shi Tingna. Imple- mentation of finite-state model predictive control for commutation torque ripple minimization of permanent- magnet brushless DC motor[J]. IEEE Transactions on Industrial Electronics, 2013, 60(3): 896-905.
[12] Shi Tingna, Cao Yanfei, Jiang Guokai, et al. A torque control strategy for torque ripple reduction of brush- less DC motor with non-ideal back electromotive force[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4423-4433.
[13] Shi Tingna, Guo Yuntao, Song Peng, et al. A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J]. IEEE Transactions on Industrial Electronics, 2010, 57(10): 3483-3490.
[14] Li Xinmin, Xia Changliang, Cao Yanfe, et al. Com- mutation torque ripple reduction strategy of Z-source inverter fed brushless DC motor[J]. IEEE Transa- ctions on Power Electronics, 2016, 31(11): 7677- 7690.
[15] Cao Yanfei, Shi Tingna, Li Xinmin, et al. A commutation torque ripple suppression strategy for brushless DC motor based on diode-assisted Buck- Boost inverter[J]. IEEE Transactions on Power Elec- tronics, 2019, 34(6): 5594-5605.
Current Control Strategy of Brushless DC Motor Based on Non-Inductive Boost Topology
Abstract In this paper, a Boost topology is designed using MOSFETs, diodes and capacitors. This structure does not require inductors, which is beneficial to reduce the cost and volume of the drive system. Combined the output mode of Boost topology with the operation mode of brushless DC motor (BLDCM), four switching vectors are constructed to ensure the normal operation of the drive system, and a current control strategy of BLDCM based on Boost topology is further proposed. In commutation period and non-commutation period of BLDCM, current control can be realized by selecting the appropriate vector. In addition, in the commutation period, a unified control method can be used to suppress the commutation torque ripple without switching control strategies according to the speed range.
keywords:Brushless DC motor (BLDCM), Boost topology, current control, commutation torque ripple
中图分类号:TM33
DOI: 10.19595/j.cnki.1000-6753.tces.191496
国家自然科学基金(51807141)、天津市自然科学基金(18JCQNJC74200)和博士后创新人才支持计划(BX20200289)资助项目。
收稿日期 2019-11-15
改稿日期 2020-01-10
曹彦飞 女,1990年生,博士,研究方向为电机控制与电力电子技术。E-mail: caoyanfei@zju.edu.cn(通信作者)
陆海天 男,1995年生,硕士,研究方向为无刷直流电机系统及其控制。E-mail: luhaitian@tju.edu.cn
(编辑 崔文静)