 (1)
(1)摘要 针对永磁直线同步电机(PMLSM)易受系统参数变化、外部扰动、摩擦力等不确定性因素影响的问题,采用二阶滑模控制(2OSMC)和递归径向基神经网络(RRBFNN)相结合的智能二阶滑模控制(I2OSMC)方法来提高系统控制性能。利用2OSMC削弱传统滑模控制中的抖振问题,提高了系统的位置跟踪精度。但由于难以估计系统中不确定性因素的边界,从而无法实现2OSMC的最佳性能,因此,引入RRBFNN对不确定性因素进行估计。由于RRBFNN具有较快的学习能力,可通过在线训练网络参数,进而提高系统的鲁棒性。实验结果表明,所提出的控制方法切实可行,能够有效地抑制不确定性因素对系统的影响,使系统具有较高的位置跟踪精度和较强的鲁棒性能。
关键词:永磁直线同步电机 不确定性因素 二阶滑模控制 递归径向基神经网络
近年来,随着电力电子技术的进步以及高性能永磁材料的发展,永磁直线同步电机(Permanent Magnet Linear Synchronous Motor, PMLSM)受到了极大的重视[1]。由于具有结构简单、没有机械摩擦力、推力大和体积小等优点,PMLSM适合于高性能伺服应用场合,广泛应用于交通运输、航空航天、工业与自动化、仪器仪表和军工业等领域[2]。PMLSM的特点在于利用电能直接产生直线运动,不需要中间转换结构,省去了传动链、齿轮组、滚珠丝杠等间接机械传动装置,消除了间隙死区、摩擦以及弹性等影响,但同时PMLSM伺服系统性能受时变不确定性因素影响很大,其中包括系统参数变化、外部扰动、摩擦力等[3-4]。因此,为降低不确定性因素对系统的影响,必须设计出适合的控制器,使系统具有强鲁棒性,从而提高系统控制性能。
为此,近年来,国内外学者对电机控制方法进行了广泛的研究,并提出了鲁棒控制、模糊控制、神经网络控制和滑模控制等多种控制方法[5]。其中滑模控制能够克服系统的不确定性因素,对扰动具有很强的鲁棒性,尤其对非线性系统的控制具有良好的控制效果,因此,在电机控制方面得到了广泛的应用[6]。但由于在接近滑模面时的惯性或延迟等原因,致使滑模控制存在抖振问题。为此,提出了将鲁棒控制、神经网络控制、模糊控制等与滑模控制相结合的混合控制策略以抑制抖振现象[7]。文献[8]采用积分滑模控制方法,提高了系统的响应速度,同时减小了稳态误差,但当系统状态偏出给定轨迹时将导致系统不稳定。文献[9]提出一种结合滑模观测器和模糊控制各自优点的模糊滑模速度位置估计方法,保证了系统的鲁棒性和控制精度,但是模糊控制器的模糊规则选取需要依靠大量经验。文献[10]设计了二阶滑模控制器,该方法充分利用了辅助滑模面,在不增加复杂度的前提下,有效抑制抖振,提高系统的位置跟踪性能。但其难以估计不确定性因素的边界,因此,将模型参考自适应估计器与二阶滑模控制器相结合,从而提高系统的鲁棒性。由此可知,系统不确定性因素的边界难以预测,也为滑模控制器的设计以及抖振的抑制增加了难度[11]。为此,文献[12]提出将Elman神经网络与互补滑模控制相结合的方法,利用Elman神经网络对不确定性因素的边界进行估计,但在Elman网络模型中只计入了隐层节点的反馈,而没有考虑输出层节点的反馈,从而影响了网络的收敛速度和精度。文献[13-14]提出将径向基神经网络(Radial Basis Function Neural Network, RBFNN)分别与滑模控制和快速终端滑模控制相结合的方法,利用RBFNN对不确定性因素的边界进行实时估计,从而改善系统的性能,但其网络结构固定且学习速度较慢。
为解决不确定性因素对PMLSM伺服系统的影响,使系统具有良好的位置跟踪精度及强鲁棒性,本文提出基于递归径向基神经网络(Recurrent Radial Basis Function Neural Network, RRBFNN)的智能二阶滑模控制(Intelligent Second-Order Sliding Mode Control, I2OSMC)方法。二阶滑模控制(Second-Order Sliding Mode Control, 2OSMC)采用饱和函数替换传统切换函数,削弱了抖振现象,并抑制系统不确定性因素对系统的影响。但由于不确定性因素的边界在实际应用中很难提前获知,因此结合RRBFNN的学习能力强和2OSMC鲁棒性强的优点设计I2OSMC方法,RRBFNN可以在线调节神经网络参数,从而有效地估计并抑制不确定性因素,保证系统的强鲁棒性。最后,通过基于数字信号处理器(Digital Signal Processor, DSP)的实验平台对PMLSM伺服系统进行实验验证,结果表明,所提出的方法具有良好的控制性能。
在同步参考坐标系下,PMLSM的电压方程和磁链方程表示为
(1) (2)
(2)
 (3)
(3)
 (4)
(4)式中, 、
、 、
、 、
、 、
、 、
、 、
、 、
、 分别为
分别为 、
、 轴的电压、电流、磁链和电感;
轴的电压、电流、磁链和电感; 为电阻;
为电阻; 为极距;
为极距; 为动子线速度;
为动子线速度; 为永磁体磁链。
为永磁体磁链。
电磁推力方程表示为
 (5)
(5)式中, 为极对数。
为极对数。
在面贴式PMLSM中,有 ,则
,则 简化为
简化为
 (6)
(6)其中,电磁推力系数 为
为
PMLSM运动方程可表示为
 (7)
(7)式中, 为动子总质量;
为动子总质量; 为黏滞摩擦因数;
为黏滞摩擦因数; 为系统总扰动,包括参数变化、外部扰动和摩擦力等。因此,削弱对系统的影响是提高系统性能的关键。
为系统总扰动,包括参数变化、外部扰动和摩擦力等。因此,削弱对系统的影响是提高系统性能的关键。
若忽略系统参数变化、外部扰动和摩擦力等不确定性因素对PMLSM伺服系统的影响,可将式(7)改写成理想状态下的动态方程为
 (8)
(8)其中,系统控制输入为
若考虑不确定性因素对系统的影响,式(7)可改写为

 (9)
(9)
 (10)
(10)
其中
式中, 、
、 和
和 为由和引起的系统参数不确定性;
为由和引起的系统参数不确定性; 为系统总不确定性,且假设
为系统总不确定性,且假设 ,其中,
,其中, 为一正常数,是系统总不确定性的上界,同时也作为2OSMC的切换增益。
为一正常数,是系统总不确定性的上界,同时也作为2OSMC的切换增益。
PMLSM的智能二阶滑模控制系统框图如图1所示。其中,点画线框内为智能二阶滑模控制器。控制系统主要由智能二阶滑模控制器、PI控制器、坐标变换、电机检测单元等组成。I2OSMC采用2OSMC与RRBFNN相结合的方法来设计,能够有效估计并抑制系统不确定性因素。
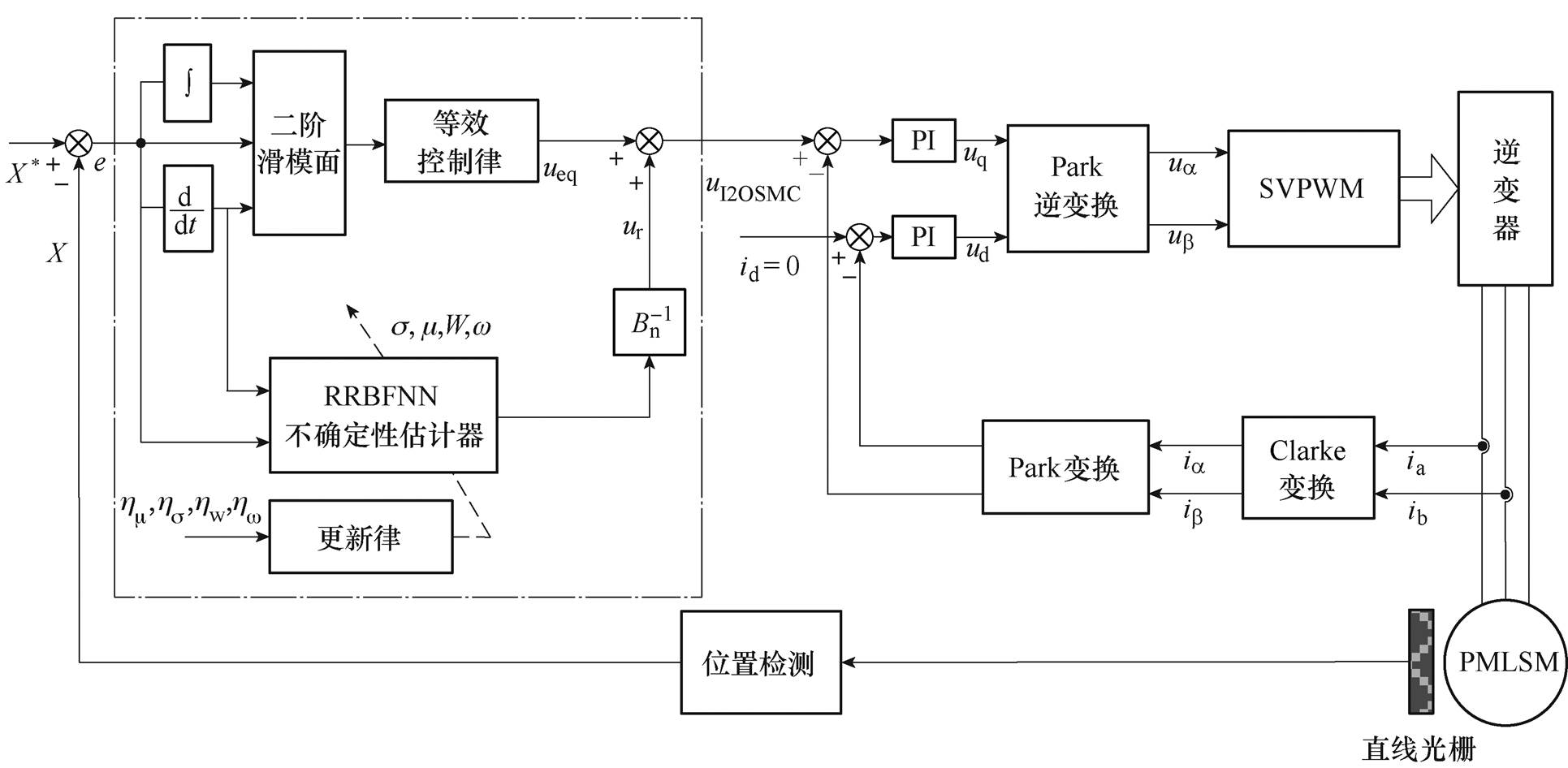
图1 PMLSM的智能二阶滑模控制系统框图
Fig.1 Block diagram of intelligent second-order sliding mode control system for PMLSM
对于PMLSM伺服系统而言,所设计的控制器需要在系统不确定性因素存在的情况下,仍能准确地实现不同给定参考轨迹的精准跟踪控制。为简化设计,定义 为理想位置,
为理想位置, 为PMLSM动子在t时刻的实际位置,位置跟踪误差为
为PMLSM动子在t时刻的实际位置,位置跟踪误差为
 (11)
(11)为消除由不确定性因素的存在所产生的稳态误差,引入积分项,因此定义滑模变量S及其导数为
 (12)
(12)
 (13)
(13)式中, 为滑模变量。
为滑模变量。
设计二阶滑模面为
 (14)
(14)由式(14)可以看出,二阶滑模面是一种比例-积分-微分型滑模面,这种设计既可以实现积分项消除系统跟踪的稳态误差的优点,又可以避免系统响应延迟的缺点。
将式(9)代入式(14)并对其求导得
 (15)
(15)式中, 为给定速度;
为给定速度; 为t时刻的实际速度。
为t时刻的实际速度。
为保证系统的稳定性,设计2OSMC的控制律,其由等效控制律和切换控制律组成,表示为
 (16)
(16)式中, 为等效控制律;
为等效控制律; 为切换控制律;
为切换控制律; 为2OSMC的控制律,它可使系统状态轨迹于有限时间内收敛到滑模面上,并一直保持在滑模面附近运动,从而达到削弱抖振、减小跟踪误差的效果。
为2OSMC的控制律,它可使系统状态轨迹于有限时间内收敛到滑模面上,并一直保持在滑模面附近运动,从而达到削弱抖振、减小跟踪误差的效果。
选择李雅普诺夫函数为
 (17)
(17)对V求导,并将式(14)~式(16)代入可得
 (18)
(18)因此,设计等效控制律为
 (19)
(19)
主要用于理想状态下无外加干扰时对系统的控制。但当系统存在不确定性因素时,无法满足系统较强的鲁棒性要求。因此,设计切换控制律用于抑制不确定性因素对系统的影响,表示为
 (20)
(20)
式中, 为饱和函数,用于替换传统滑模控制中的符号函数以抑制抖振现象;
为饱和函数,用于替换传统滑模控制中的符号函数以抑制抖振现象; 为边界层厚度。可表示为
为边界层厚度。可表示为
 (21)
(21)为保证 的稳定性,需满足
的稳定性,需满足 ,即有
,即有
 (22)
(22)由式(22)可知,系统满足李雅普诺夫渐近稳定条件,这确保了系统状态轨迹将在有限时间内到达滑模面。2OSMC结构框图如图2所示。
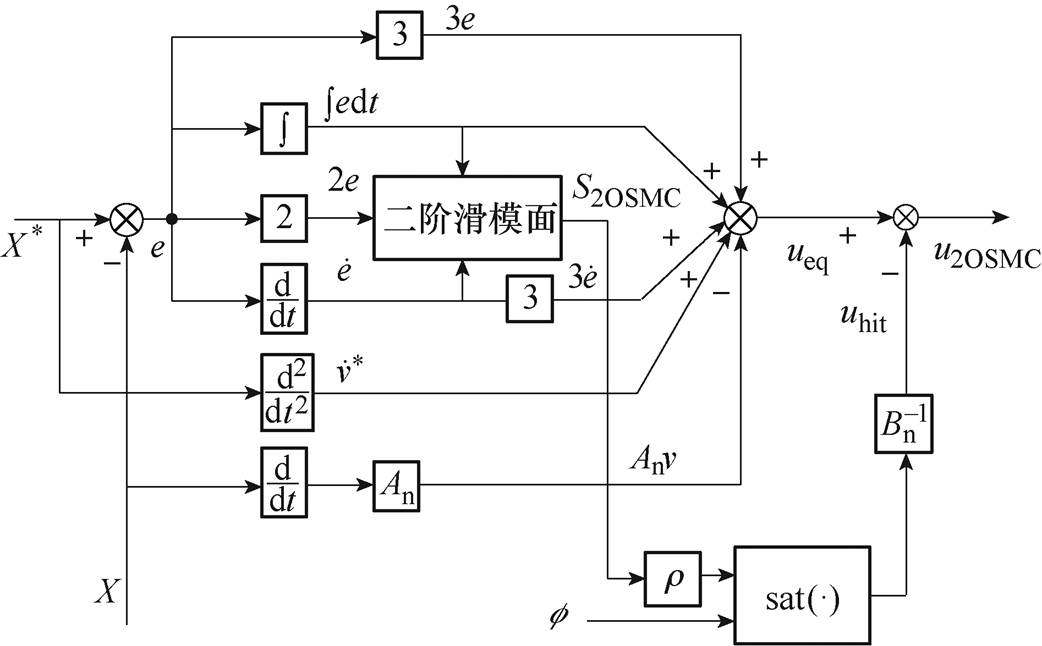
图2 2OSMC结构框图
Fig.2 Stu rcture diagram of 2OSMC
不确定性因素的存在使系统难以建立精准数学模型,2OSMC以其对不确定性因素的不敏感性取得了优良的控制效果。但在实际应用中,难以预知不确定性因素的确切值导致切换控制律中参数的设定较为困难。因此,不确定性因素边界的确定对系统控制性能的改善有着显著的影响。尽管可通过试凑法选择边界值实现2OSMC中跟踪误差收敛的要求,但该方法耗时且不能在实际应用中保证系统的强鲁棒性。因此,本文结合2OSMC和RRBFNN不确定性估计器设计I2OSMC以弥补上述缺点。
神经网络控制是近年来兴起的一种智能控制方法,由于其具有强大的学习能力和存储能力,常被用来作为估计和辨识的工具[15-16]。RBFNN作为一种局部逼近神经网络,具有结构简单、逼近能力强的优点,但其学习收敛速度有待改善[17]。因此,本文在RBFNN的基础上增加了递归环节,设计了RRBFNN不确定性估计器用于估计系统的不确定性因素。RRBFNN对于不确定性的估计主要是根据系统实时反馈的位置跟踪误差的大小,通过RRBFNN网络中每层结构算法的输入输出关系以及连接权重的关系进行更新和调整,进而估计出系统中存在不确定性因素边界的范围,并从RRBFNN的输出层输出,从而替换二阶滑模控制中的切换控制律,解决参数选取困难的问题。基于RRBFNN的I2OSMC系统的控制律表示为
 (23)
(23) (24)
(24)
式中, 为RRBFNN输出的控制律;
为RRBFNN输出的控制律; 为RRBFNN的网络输出。
为RRBFNN的网络输出。
2.3.1 RRBFNN的网络结构
为了提高函数逼近的精度,本文采用了三层RRBFNN结构,如图3所示,包括输入层(I层)、隐含层(J层)和输出层(O层)。同时,由于其连续和微分特性,采用高斯函数作为隐含层中节点的激活函数。此外,RRBFNN的输出通过时间延迟递归到输入层以增强网络的动态学习能力。
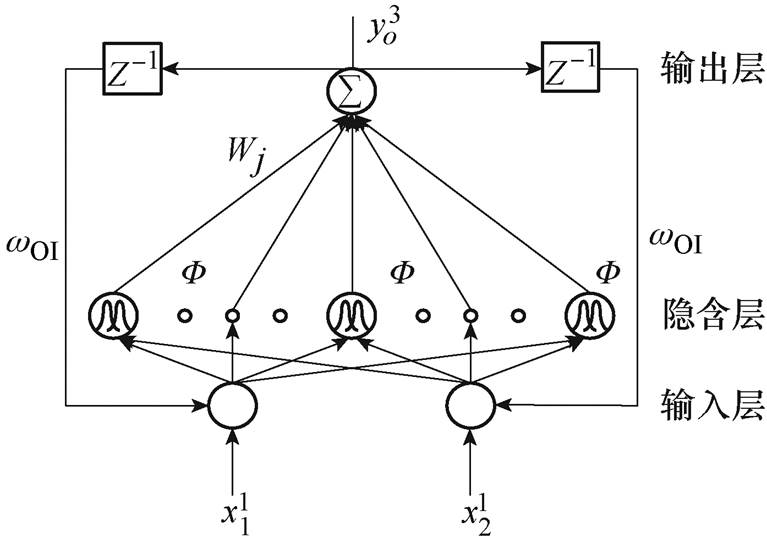
图3 RRBFNN结构
Fig.3 Structure of RRBFNN
RRBFNN各层的信号传播和基本功能如下:
(1)输入层。此层中节点将输入信号传输到隐含层。对于输入层中的每个节点 ,RRBFNN的输入和输出可表示为
,RRBFNN的输入和输出可表示为
 (25)
(25) (26)
(26)
 (27)
(27)
 (28)
(28)式中, 为第1层节点的第个输入;
为第1层节点的第个输入; 为迭代次数;
为迭代次数; 为输出层的递归权重;输入值为,。
为输出层的递归权重;输入值为,。
(2)隐含层。此层中的每个节点都采用高斯函数作为激活函数。对于第 个节点的输出表示为
个节点的输出表示为
 (29)
(29) (30)
(30)
式中,高斯函数的平均向量为 ;标准差向量为
;标准差向量为
 ;
; 和
和 为第个输入隐含层中第个神经元的平均值和标准差;M为神经元个数,
为第个输入隐含层中第个神经元的平均值和标准差;M为神经元个数, 。
。
(3)输出层。RRBFNN的输出表示为
 (31)
(31) (32)
(32)
 (33)
(33)
 (34)
(34)式中, 和
和 为隐含层和输出层之间的连接权重;
为隐含层和输出层之间的连接权重; 为输出层节点的第个输入;为PMLSM伺服系统中不确定性因素的估计值,也是RRBFNN的输出。
为输出层节点的第个输入;为PMLSM伺服系统中不确定性因素的估计值,也是RRBFNN的输出。
结合式(25)、式(29)和式(31),可将以向量形式表示为
 (35)
(35)式中, ;
; 为隐含层到输出层的可调权重向量;
为隐含层到输出层的可调权重向量; 为输出层到输入层的可调递归权重;
为输出层到输入层的可调递归权重;
 为隐含层的输出向量。
为隐含层的输出向量。
2.3.2 RRBFNN在线学习算法
在RRBFNN中,连接权值的修正可以采用反向传播算法。定义能量函数为
 (36)
(36)RRBFNN的参数更新律如下:
在输出层中,要传播的误差项为
 (37)
(37)权重的数值更新为

 (38)
(38)
式中, 为RRBFNN的隐含层和输出层之间连接权重的学习速率。
为RRBFNN的隐含层和输出层之间连接权重的学习速率。
输出层的权重更新为
 (39)
(39)在隐含层中,要传播的误差项为

 (40)
(40)
的更新律为
 (41)
(41)
的更新律为
 (42)
(42)
式中, 和
和 分别为平均值和标准差的学习速率。
分别为平均值和标准差的学习速率。
平均值和标准差更新律为
 (43)
(43) (44)
(44)
递归权重更新律为

 (45)
(45)
式中, 为递归权重的学习律参数。更新为
为递归权重的学习律参数。更新为
 (46)
(46)实验采用的PMLSM生产于美国Kollmorgen公司,PMLSM伺服系统的核心控制单元为TI公司推出的DSP TMS320F28335。PMLSM控制系统结构如图4所示,其硬件结构可分为运算控制单元、供电电路、检测单元和PMLSM。运算控制单元为PC和DSP;PMLSM的供电电路由整流器和逆变器组成,逆变器开关频率为5kHz;检测电路包括电压、电流、速度和位置信号的检测,位置信号的检测采用直线光栅传感器,其精度为1mm。实验中将采用2OSMC、基于RBFNN的2OSMC和基于RRBFNN的I2OSMC三种方法,通过实验对比分析证明I2OSMC方法的可行性。
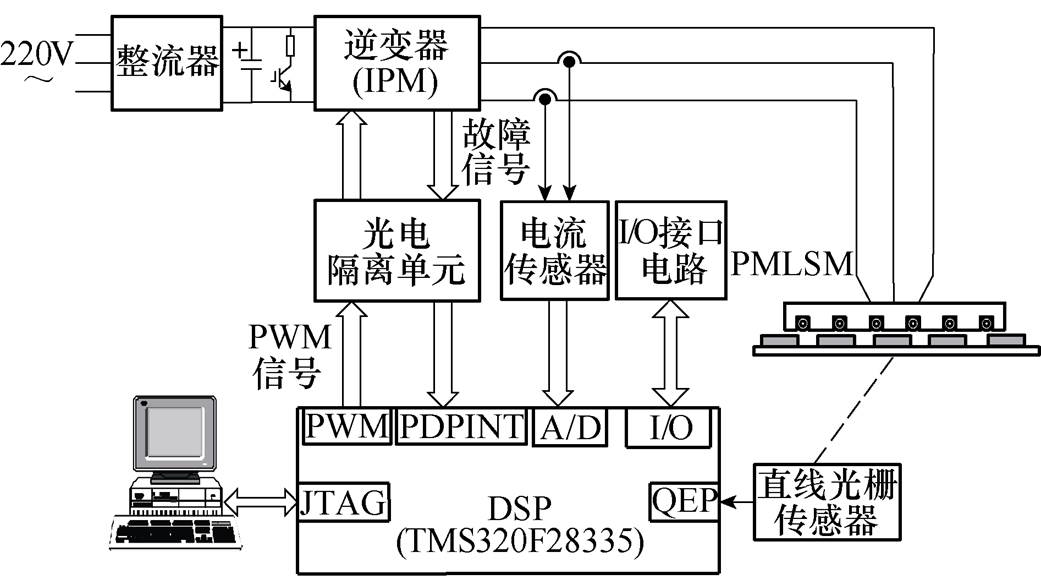
图4 基于DSP的PMLSM控制系统结构
Fig.4 Structure of PMLSM control system based on DSP
实验中所用电机参数为: ,
,
 ,
, ,
, ,
, ,
, ,
, ,
, 。在2OSMC中,反复调整系统参数以得到最优性能,参数设置为
。在2OSMC中,反复调整系统参数以得到最优性能,参数设置为 =0.45,
=0.45, =0.05,ρ=8,
=0.05,ρ=8, =0.08,为方便对比,基于RBFNN 的2OSMC和基于RRBFNN的I2OSMC方法中均选取此参数。为了平衡RBFNN训练的精度和速度,学习速率
=0.08,为方便对比,基于RBFNN 的2OSMC和基于RRBFNN的I2OSMC方法中均选取此参数。为了平衡RBFNN训练的精度和速度,学习速率 、
、 和
和 选取为0.1。为了方便与RBFNN 进行对比,RRBFNN学习速率、、和
选取为0.1。为了方便与RBFNN 进行对比,RRBFNN学习速率、、和 均选取为0.1。
均选取为0.1。
为了验证I2OSMC在系统参数变化时的控制性能,给定位置信号为周期2s、幅值10mm的正弦信号,对系统进行参数变化为实际质量 ,实际黏滞摩擦因数
,实际黏滞摩擦因数 。采用2OSMC、基于RBFNN的2OSMC和基于RRBFNN的I2OSMC方法的位置跟踪误差曲线如图5所示。对图5a和图5b进行对比可以看出,将RBFNN和2OSMC相结合的方法有效地削弱了抖振现象,图5a中最大位置跟踪误差为3.3mm,图5b中最大位置跟踪误差为1.2mm,极大程度地降低了位置跟踪误差。对图5b和图5c进行对比可以看出,图5c中最大位置跟踪误差为0.5mm,I2OSMC无论是在削弱抖振性能和位置跟踪性能方面均有更好的控制效果。
。采用2OSMC、基于RBFNN的2OSMC和基于RRBFNN的I2OSMC方法的位置跟踪误差曲线如图5所示。对图5a和图5b进行对比可以看出,将RBFNN和2OSMC相结合的方法有效地削弱了抖振现象,图5a中最大位置跟踪误差为3.3mm,图5b中最大位置跟踪误差为1.2mm,极大程度地降低了位置跟踪误差。对图5b和图5c进行对比可以看出,图5c中最大位置跟踪误差为0.5mm,I2OSMC无论是在削弱抖振性能和位置跟踪性能方面均有更好的控制效果。
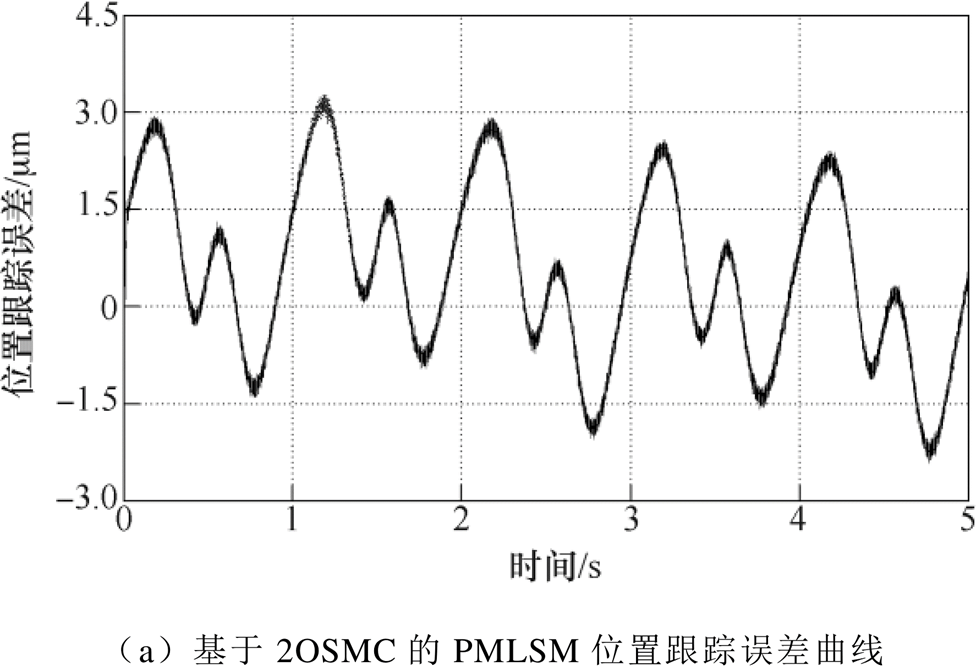
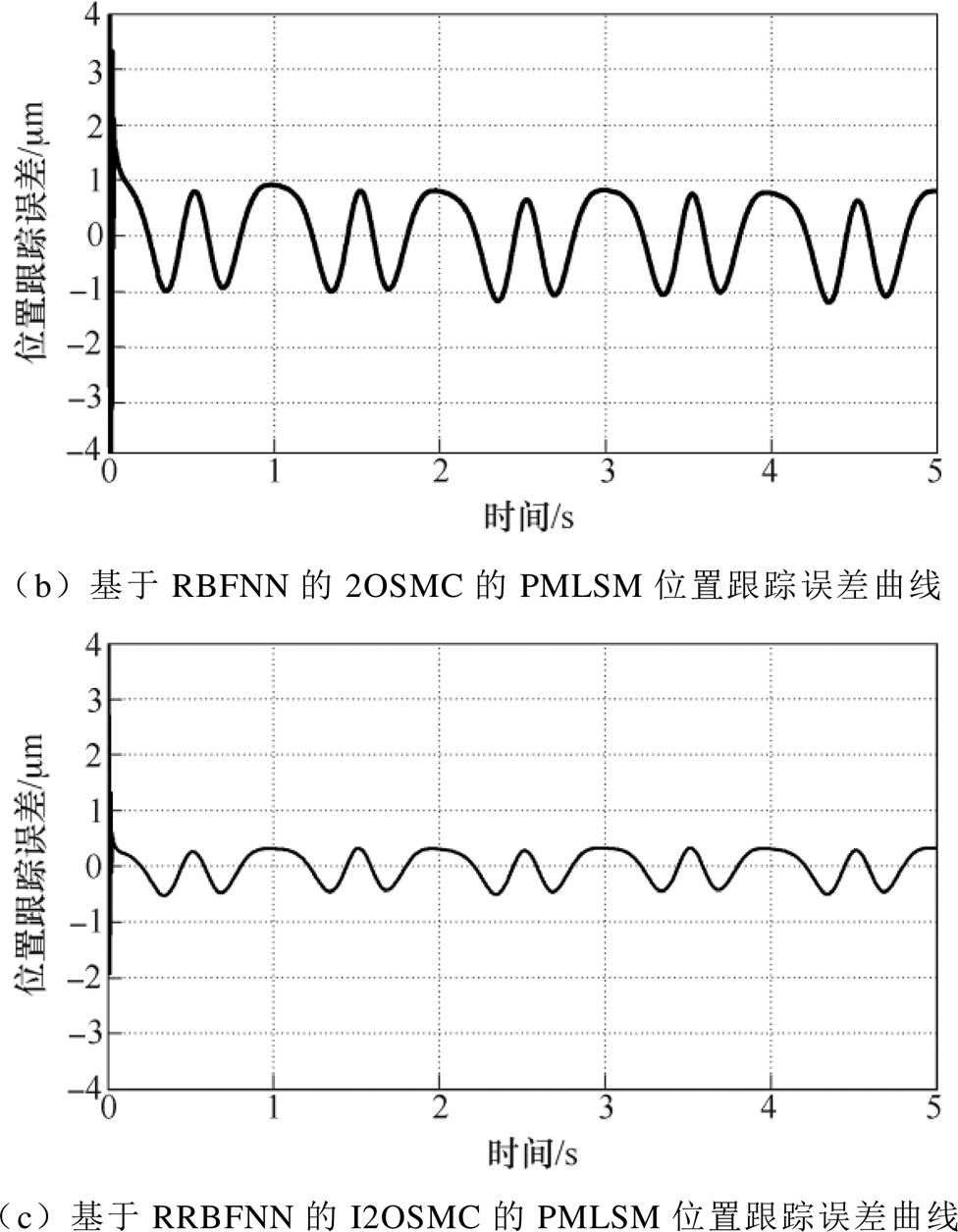
图5 正弦信号下的位置误差曲线
Fig.5 Position error curves of sinusoidal input
为验证所提出的I2OSMC在负载扰动存在时的控制性能,对系统给定如图6所示的梯形输入信号,并在2.5s时对系统突加50N负载。为更好地实现与传统控制的对比,本实验采用了传统PI控制与其他三种控制方法进行对比。采用传统PI控制、2OSMC、基于RBFNN的2OSMC和基于RRBFNN的I2OSMC方法的位置跟踪误差曲线如图7所示。为方便对比,给出四种控制方法下位置跟踪误差的最大值、平均值以及标准差三种度量来进行比较,误差大小对比见表1。对比图7b和图7c可以看出,将神经网络与2OSMC相结合能够有效地减小位置跟踪误差并削弱抖振,但由于RBFNN为静态神经网络,其学习能力稍慢,致使系统响应速度略有下降。对比图7d和图7b可看出,I2OSMC具有更好的位置跟踪精度,其动态响应能力与2OSMC相近,但明显快于基于RBFNN的2OSMC方法。因此,将I2OSMC应用于PMLSM伺服系统有效可行,对于提高系统位置跟踪精度和鲁棒性能具有重要的意义。
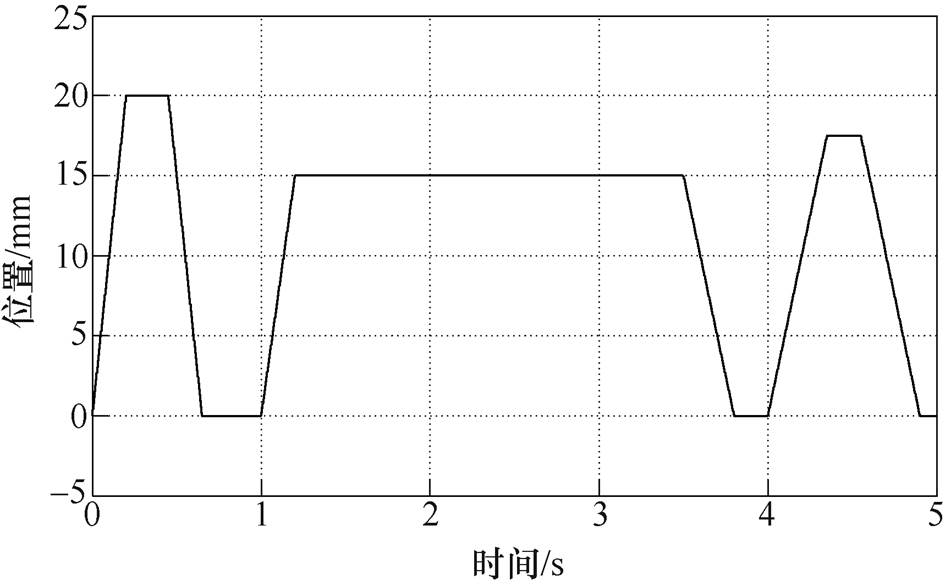
图6 梯形输入信号
Fig.6 Trapezoid input signal
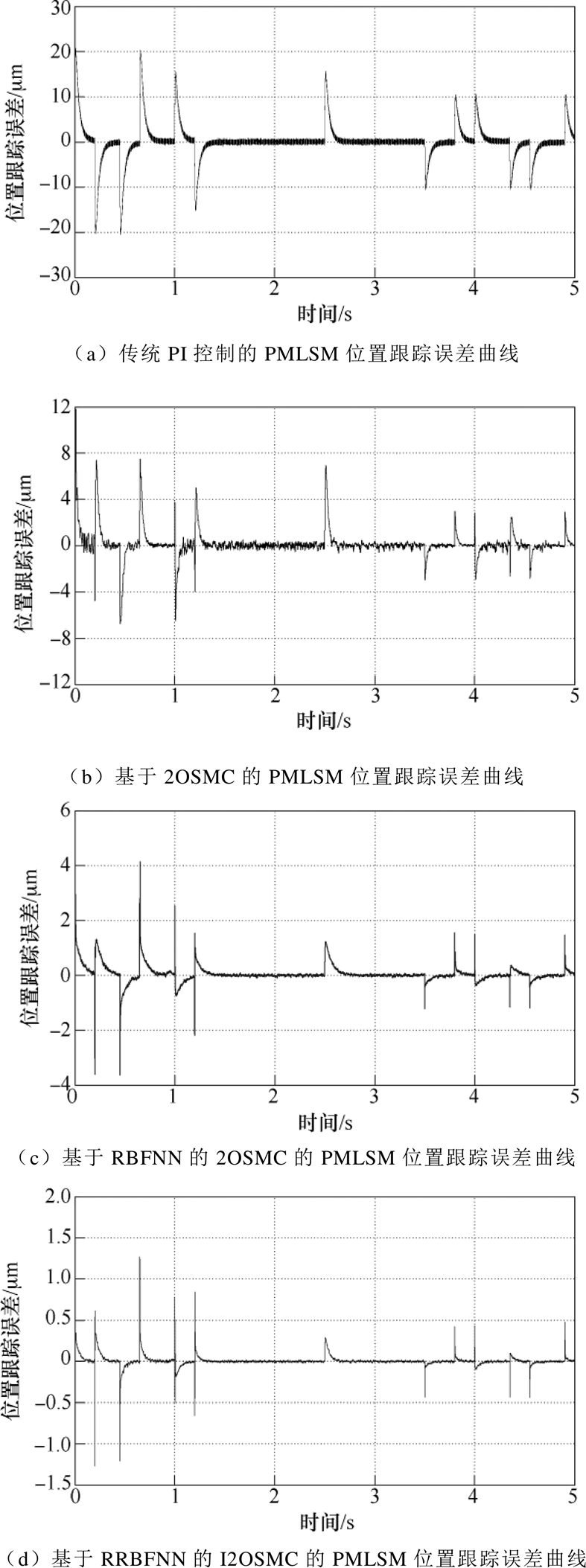
图7 梯形信号下的位置误差曲线
Fig.7 Position error curves of trapezoid input
表1 位置跟踪误差对比
Tab.1 Comparison of position tracking errors
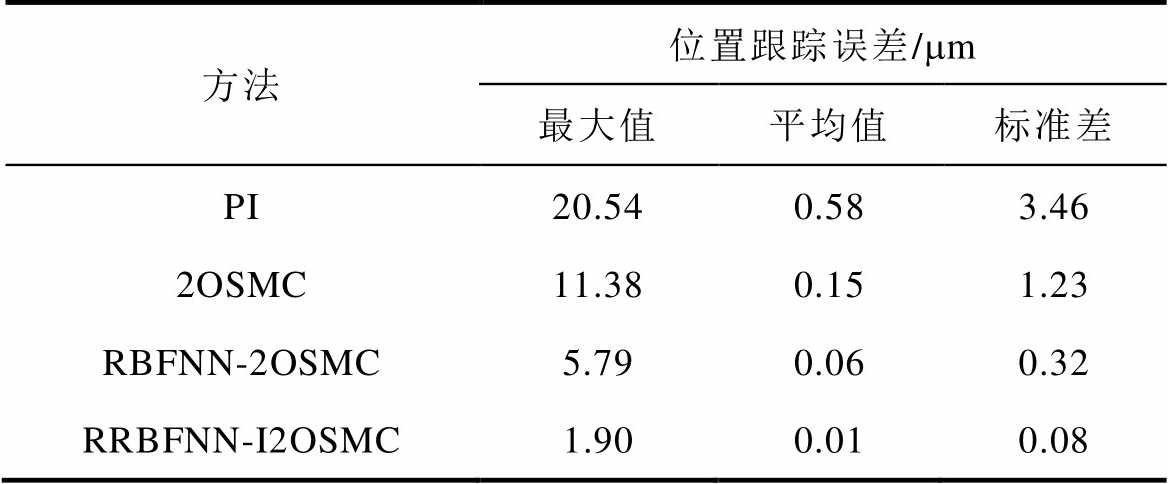
方法位置跟踪误差/mm 最大值平均值标准差 PI20.540.583.46 2OSMC11.380.151.23 RBFNN-2OSMC5.790.060.32 RRBFNN-I2OSMC1.900.010.08
本文采用基于RRBFNN的I2OSMC的位置控制方法来抑制系统不确定性因素的影响。在I2OSMC设计中,2OSMC用来削弱抖振、提高系统鲁棒性;RRBFNN旨在估计并抑制系统的不确定性因素边界。实验结果表明,同2OSMC方法和基于RBFNN的2OSMC方法相比,I2OSMC既具有快速准确的位置跟踪性能,又具有较强的抗干扰能力,对PMLSM伺服系统有更好的控制效果。
参考文献
[1] Kazraji S M, Soflayi R B, Sharifian M B B. Sliding-mode observer for speed and position sensor- less control of linear-PMSM[J]. Electrical Control & Communication Engineering, 2014, 5(1): 20-26.
[2] 智淑亚, 吴洪兵. 数控进给伺服系统摩擦补偿控制仿真[J]. 沈阳工业大学学报, 2019, 41(4): 361-365.
Zhi Shuya, Wu Hongbing. Simulation of friction compensation control of NC feed servo system[J]. Journal of Shenyang University of Technology, 2019, 41(4): 361-365.
[3] Chen S Y, Liu T S. Intelligent tracking control of a PMLSM using self-evolving probabilistic fuzzy neural network[J]. IET Electric Power Applications, 2017, 11(6): 1043-1054.
[4] 朱国昕, 雷鸣凯, 赵希梅. 永磁同步电机伺服系统自适应迭代学习控制[J]. 沈阳工业大学学报, 2018, 40(1): 6-11.
Zhu Guoxin, Lei Mingkai, Zhao Ximei. Adaptive iterative learning control for permanent magnet synchronous motor servo system[J]. Journal of Shenyang University of Technology, 2018, 40(1): 6-11.
[5] 孟高军, 袁野, 孙玉坤, 等. 带定位力补偿的扩张观测器磁通切换永磁直线电机无位置传感器控制策略[J]. 电工技术学报, 2018, 33(17): 4091-4101.
Meng Gaojun, Yuan Ye, Sun Yukun, et al. Extended state observer with cogging force compensation for sensorless control strategy of linear flux-switching permanent magnet machine[J]. Transaction of China Electrotechnical Society, 2018, 33(17): 4091-4101.
[6] Namazi M M, Rashidi A, Saghaian-Nejad S M, et al. Chattering-free robust adaptive sliding-mode control for switched reluctance motor drive[C]//IEEE Trans- portation Electrification Conference and Expo, Michigan, USA, 2016: 474-478.
[7] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2016, 24(3): 407- 418.
Liu Jinkun, Sun Fuchun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory and Applications, 2016, 24(3): 407- 418.
[8] 侯勇, 赵姗姗, 王勇. 永磁同步电机的积分型滑模变结构控制[J]. 天津科技大学学报, 2013, 28(2): 55-58.
Hou Yong, Zhao Shanshan, Wang Yong. Integral sliding mode variable structure control of permanent magnet synchronous motor[J]. Journal of Tianjing University of Science and Technology, 2013, 28(2): 55-58.
[9] 陆华才, 提娟, 刘怡君, 等. 基于模糊滑模观测器的PMLSM无传感器控制[J]. 信息与控制, 2016, 45(1): 60-65.
Lu Huacai, Ti Juan, Liu Yijun, et al. Sensorless control of PMLSM based on fuzzy sliding mode observer[J]. Information and Control, 2016, 45(1): 60-65.
[10] Zhao Lihang, Huang Jin, Liu He, et al. Second-order sliding-mode observer with online parameter identi- fication for sensorless induction motor drives[J]. IEEE Transactions on Industrial Electronics, 2014, 61(10): 5280-5289.
[11] Panah P G, Ataei M, Mirzaeian B, et al. A robust adaptive sliding mode control for PMLSM with variable velocity profile over wide range[J]. Research Journal of Applied Sciences Engineering & Tech- nology, 2015, 10(9): 997-1006.
[12] 赵希梅, 金鸿雁. 基于Elman神经网络的永磁直线同步电机互补滑模控制[J]. 电工技术学报, 2018, 33(5): 973-979.
Zhao Ximei, Jin Hongyan. Complementary sliding mode control for permanent magnet linear synchronous motor based on Elman neural network[J]. Transaction of China Electrotechnical Society, 2018, 33(5): 973-979.
[13] 朱玲, 李艳东, 孙明, 等. 移动机器人编队的神经网络滑模控制[J]. 电机与控制学报, 2014, 18(3): 113-118.
Zhu Ling, Li Yandong, Sun Ming, et al. Sliding mode control of mobile robot formations based on neural networks[J]. Electric Machines and Control, 2014, 18(3): 113-118.
[14] Qi Liang, Shi Hongbo. Adaptive position tracking control of permanent magnet synchronous motor based on RBF fast terminal sliding mode control[J]. Neurocomputing, 2013, 115: 23-30.
[15] 朱煜峰, 许永鹏, 陈孝信, 等. 基于卷积神经网络的直流XLPE电缆局部放电模式识别技术[J]. 电工技术学报, 2020, 35(3): 211-220.
Zhu Yufeng, Xu Yongpeng, Chen Xiaoxin, et al. Pattern recognition of partial discharges in DC XLPE cables based on convolutional neural network[J]. Transaction of China Electrotechnical Society, 2020, 35(3): 211-220.
[16] Xia Meizhen, Zhang Tianping. Adaptive neural network control for stochastic constrained block structure nonlinear systems with dynamical uncertainties[J]. International Journal of Adaptive Control and Signal Processing, 2019, 33(11): 1079-1096.
[17] An Ru, Li Wenjing, Han Honggui, et al. An improved Levenberg-Marquardt algorithm with adaptive learning rate for RBF neural network[C]//35th Chinese Con- trol Conference, Chengdu, 2016: 3630-3635.
Intelligent Second-Order Sliding Mode Control Based on Recurrent Radial Basis Function Neural Network for Permanent Magnet Linear Synchronous Motor
Abstract The permanent magnet linear synchronous motor (PMLSM) is susceptible to uncertainty factors, such as system parameter variation, external disturbance and friction. Thus, an intelligent second-order sliding mode control (I2OSMC) method combining second-order sliding mode control (2OSMC) and recurrent radial basis function neural network (RRBFNN) is used to improve system control performance. The design of 2OSMC weakens the chattering problem in the traditional sliding mode control and improves the position tracking accuracy of the system. However, because it is difficult to estimate the boundary of the uncertainty factors in the system, the optimal performance of 2OSMC cannot be achieved. Therefore, the RRBFNN is introduced to improve the robustness of the system, which has faster learning ability and can train the network parameters online. The experimental results show that the proposed control method is feasible and can effectively suppress the influence of uncertainty factors on the control system, so that the system has higher position tracking accuracy and stronger robust performance.
keywords:Permanent magnet linear synchronous motor, uncertainty factors, second-order sliding mode control, recurrent radial basis function neural network
中图分类号:TM351; TP273
DOI: 10.19595/j.cnki.1000-6753.tces.191238
辽宁省自然科学基金计划重点资助项目(20170540677)。
收稿日期2019-09-24
改稿日期 2019-11-26
王天鹤 男,1993年生,硕士研究生,研究方向为电机控制、智能控制等。E-mail: wangtianhech@163.com
赵希梅 女,1979年生,教授,博士生导师,研究方向为电机控制、鲁棒控制等。E-mail: zhaoxm_sut@163.com(通信作者)
(编辑 崔文静)