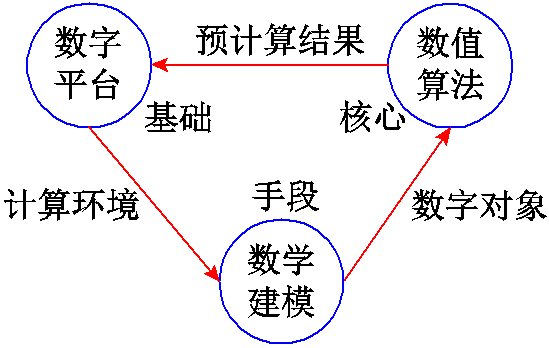
图1 数字化设计流程关系图
Fig.1 Digital design flow diagram
摘要 作为纯电动汽车的核心零部件,功率控制单元高安全和高性能方面的需求对其软件设计和验证提出了功能范围的高覆盖率和验证环节的高效率两方面的挑战。软件数字化设计由于其灵活高效与低成本的特征,是功率控制单元的设计验证面向设计自动化的有效方式。该文以电动汽车功率控制单元的软件设计为蓝本,从数字平台、数学建模和数值算法三个角度,系统地梳理了电动汽车功率控制单元软件数字化设计的最新研究进展,围绕数字化设计对于运行速度、保真度,以及复杂度的技术需求,概括了功率控制单元现有数字平台的结构特点,并对其数学建模方法和数值算法进行归纳和总结,在此基础上对电力电子数字化设计的未来发展方向进行展望。
关键词:电动汽车 数字化设计 数字孪生 功率电子设计自动化
发展电动汽车作为应对能源危机与环境污染的有效途径[1-2],是世界各国实现节能减排战略的关键。以电力电子装置为核心的功率控制单元[3](Power Control Unit, PCU)是电动汽车能源转换的关键设备,也是打造电动汽车新兴产业链的重要环节,其绿色与高效的特征是交通电气化的必要保障。
电动汽车运行环境多变、工况复杂的应用特点,使其难以满足高安全、高性能与长寿命的突出需求。一方面,为保证较高的安全等级,PCU从子部件到集成系统均需具备高可靠性[1];另一方面,多变的运行环境令极限工况下高性能的稳定保持变得困难,寿命评估受到多物理系统耦合影响的难度增加[4-5]。为保证高安全与高性能,PCU的设计遵循电动汽车标准的V型开发流程[6],通过系统设计、解耦开发、集成验证的方式,保证设计的全功能覆盖以使性能优异可靠,但同时导致设计验证的环节增多,功能范围覆盖面扩大,造成设计验证的周期变长,效率低下。因此,PCU的设计验证面临着由功能范围的高覆盖率和验证环节的高效率带来的双重挑战。
数字化设计由于其灵活高效且低成本的优势,是解决PCU设计验证高覆盖率与高效率等挑战的有效方式。数字化设计在过去成功地加速了信息电子、机械制造等行业的产业升级,但在定制化程度高、功率等级高的电力电子领域,其应用范围仍有限[7]。随着电动汽车市场体量的不断增长,PCU的设计朝着功率电子设计自动化[8-9](Power Electronic Design Automation, PEDA)的方向发展,数字化设计有望成为PCU设计开发的新趋势。数字化设计以数字平台为基础、数学建模为手段、数值算法为核心,如图1所示。数字平台集成了一定的计算资源,为数值运算提供了计算环境,通过数学建模将实际物理对象抽象成数学模型,并由数值算法进行模型的计算和更新,进而得到目标系统的模拟运行结果。
图1 数字化设计流程关系图
Fig.1 Digital design flow diagram
目前,国内外学术界与工业界围绕保真度、速度与复杂度等核心指标,在数字化设计上开展了研究工作,并积累了丰富的工程经验。其中速度体现为实时性、计算量两方面;保真度[10]包含稳定性、收敛性和精度三方面;复杂度包含资源占用、可扩展性等方面。然而各数字化方法的结构形式、优化目标与技术路线等特征不尽相同,缺乏系统性的梳理。特别是软件层面迭代更新快、隐藏风险深,是PCU设计验证的难点。近年来,国际上技术制裁与封锁等事故频发,尤其软件数字化设计首当其冲,相关技术核心多由国外掌握,我国在工业软件的研发设计方面存在明显差距,系统建立起相关的技术积累成为当务之急。因此,本文从电动汽车PCU软件设计验证高覆盖率、高效率的挑战出发,从数字平台、数学建模、数值算法三方面系统梳理其最新研究进展,并在此基础上展望PEDA的发展方向。
典型的纯电动汽车驱动系统结构如图2所示,包含整车控制器、电池单元、功率控制单元、电机、传动系及整车等部分。从控制的角度出发,实际的系统可分为控制系统和被控对象两部分。控制系统包含软件层面的整车控制算法和电驱控制算法等;被控对象包含硬件层面的功率电路和机械单元等。
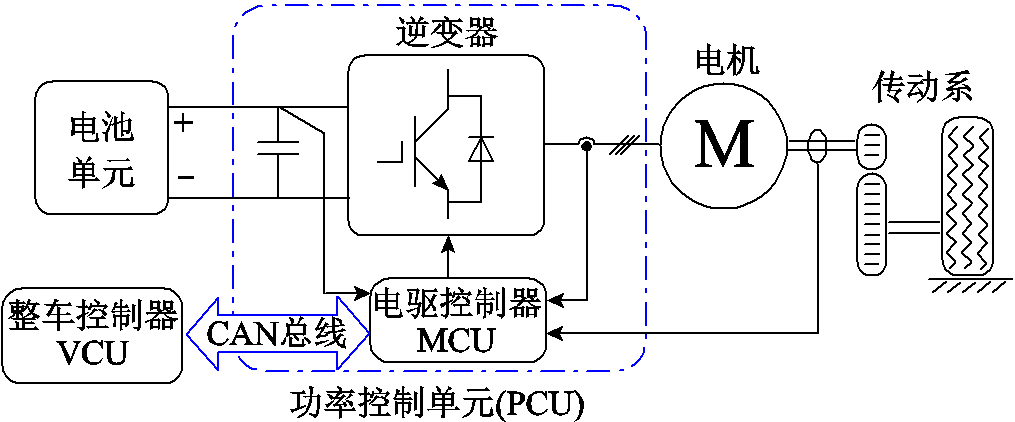
图2 纯电动汽车典型电驱动系统拓扑结构
Fig.2 Topology of electrical drive system for battery EV
为满足高安全与高性能,PCU的设计遵循电动汽车标准的快速应用开发流程,即V型开发流程[6],功率控制单元PCU的V型开发流程如图3所示。V型的左半边为设计阶段,右半边为验证阶段。整个过程在设计阶段解耦成系统-硬件-软件三个层面进行分层开发,在验证阶段再将其集成耦合至系统验证。呈现多层“耦合—解耦—耦合”的特点。相比系统和硬件层面,软件层面的设计验证更新迅速且迭代频繁,是PCU设计验证的难点。
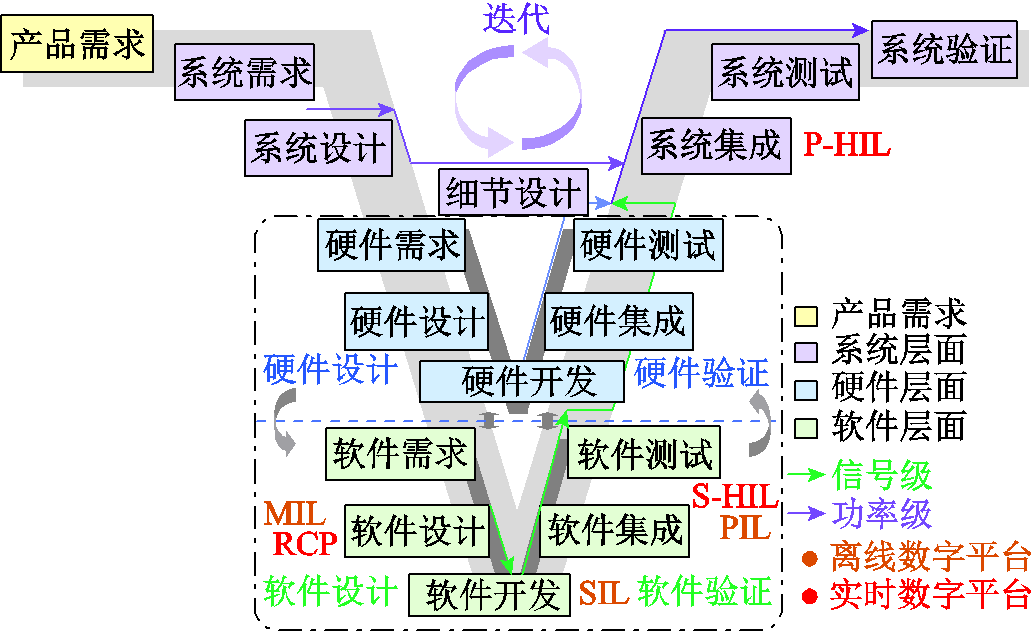
图3 功率控制单元PCU的V型开发流程
Fig.3 V-model development flow diagram of PCU
数字化平台由于其灵活高效的特征,在PCU软件设计V型图中的不同阶段,根据软件开发的技术成熟度,可以配置为:模型在环[11-12](Model in the Loop, MIL)、快速原型机[6](Rapid Control Prototype, RCP)、软件在环[13](Software in the Loop, SIL)、处理器在环[10](Processor in the Loop, PIL)与硬件在环[14-15](Hardware in the Loop, HIL)等几种结构模式,以分别满足V型研发不同节点的设计验证需求。
MIL的控制系统和被控对象均搭建在商用软件的环境中,如Simulink、PLECS等,电驱动系统模型在环结构如图4所示。MIL适用于软件开发早期算法阶段的设计验证,通过在商用软件环境中添加组合已集成完毕的库模型以完成控制策略、动稳态分析和参数匹配等功能的设计。MIL使用便捷,验证周期短,且后处理功能丰富,可以灵活地选取合适的模型求解方式,以获得精度高或速度快的数字化系统,是一种全数字化的数字平台。目前MIL在学术界和工业界运用广泛,其形式已演变多样,如基于脚本的ScanTool[16],是PCU在设计初期关于硬件选型、效率分析、热评估等问题有力的分析工具。但由于MIL以算法设计为目标,因此在软件的实现方式、硬件的运行环境等方面与真实物理系统相差较大,具有一定的局限性。
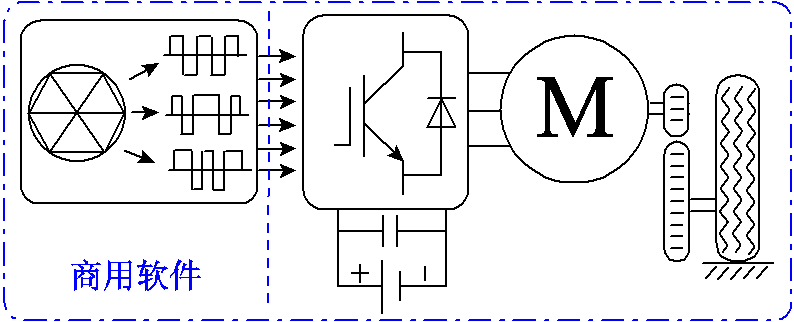
图4 电驱动系统模型在环结构
Fig.4 MIL structure of electric drive system
RCP由成熟的硬件在环技术衍生而来,其结构与信号硬件在环互补,电驱动系统快速原型机结构如图5所示。RCP的控制系统由硬件性能强大的实时仿真器自动快速地搭建完成,而被控对象则为真实的物理对象[6]。RCP的设计验证范围与MIL类似,适用于早期的算法设计验证,特别是算法开发落后于实验环境搭建的场合。在虚拟的实时计算环境中设计算法,有助于快速迭代,加速软件设计过程。但同时,RCP面对新的设计需求性价比过低。因此,通常在复杂的物理系统中,将RCP与信号HIL配合使用,实现全数字化设计,是减少昂贵且破坏性设计验证的有效手段。
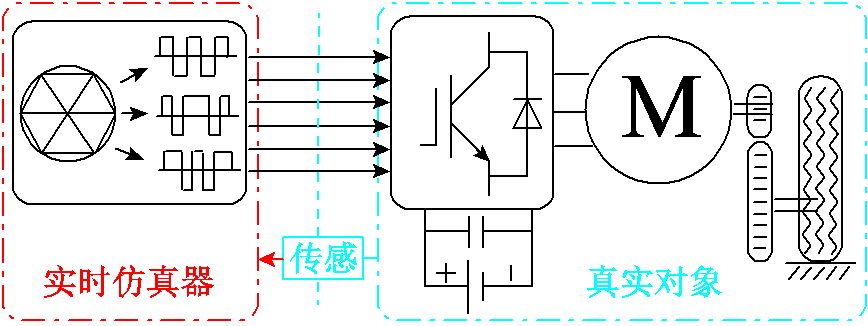
图5 电驱动系统快速原型机结构
Fig.5 RCP structure of electric drive system
SIL的控制系统与被控对象也均搭建在商用软件之中,电驱动系统软件在环结构如图6所示,但SIL的控制系统由真实的程序代码实现,如PLECS中的C Script[17]与PSIM中的DLL[18]等提供了程序代码与商用软件的接口。SIL适用于软件开发程序代码阶段的设计验证,如程序逻辑、编程规范等。但同时,由于SIL使用的仍是非目标控制器的计算内核,根据汽车开放系统架构(Automotive Open System Architecture, AUTOSAR)定义的标准,SIL仅仅适合于控制系统中应用层软件(Application Software, ASW)的程序代码验证,而基础层软件(Basic Software, BSW)的程序代码,如寄存器配置、内存分配、时序配合及程序的运行时间与溢出状况等无法验证,如图7所示。
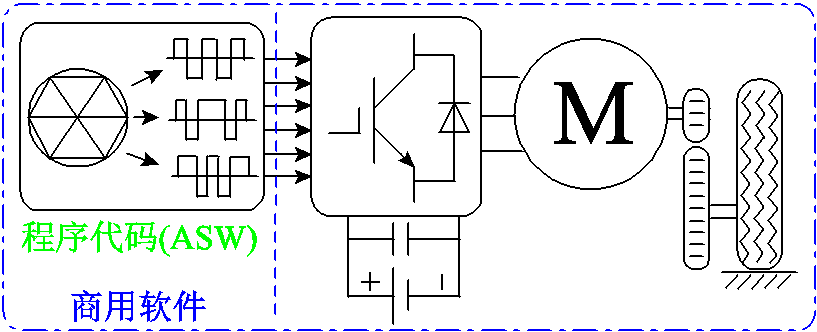
图6 电驱动系统软件在环结构
Fig.6 SIL structure of electric drive system
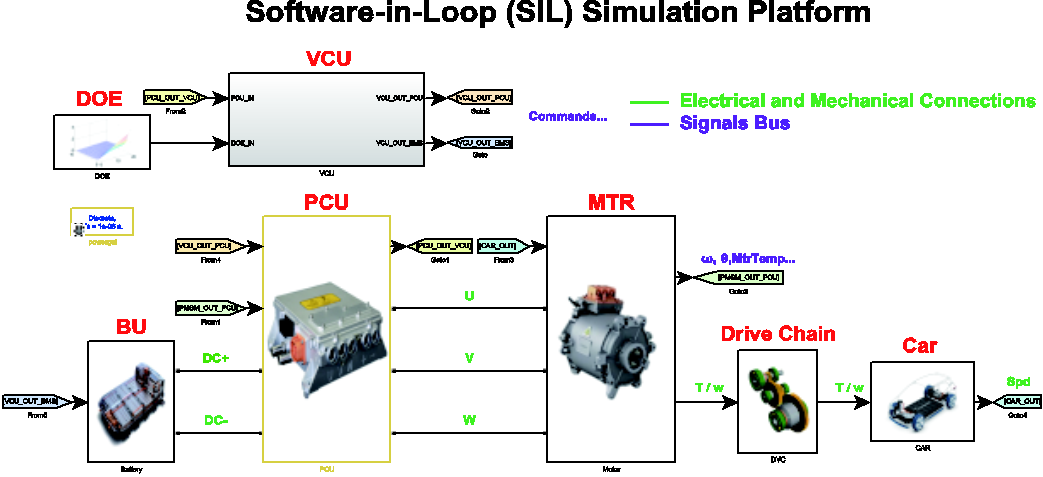
图7 软件在环应用案例
Fig.7 Example of SIL application
目前,基于模型的设计(Model Based Design, MBD)方式盛行于工业界,其免去了代码的编程过程,MIL中控制系统部分的模型可以直接生成程序代码,等价为SIL,使开发过程更加自动化。
PIL的控制系统与目标控制器保持一致,而被控对象是虚拟的,其可以搭建在商用软件中或实际控制器中。根据搭建环境的不同,PIL的结构分多种。图8a结构的PIL将程序代码的范围扩大到了BSW,能够部分模拟底层的配置程序,如PLECS中的PIL模块等[17],因此能极大程度地逼近真实的程序代码;同时,控制系统也能脱离离线的运行环境,如图8b所示,将范围扩大到硬件控制器,而被控对象可以虚拟在商用软件中,二者通过通信接口进行数据交互,也可以随控制系统一起搭建在硬件控制器中,如图8c所示,实现模型自闭环的内部仿真[19]。PIL适用于硬件控制器阶段的设计验证,其关键在于处理器的内容是真实的。图8a模式的PIL没有完全摆脱SIL的缺陷;图8b结构的PIL仍在CPU环境下计算,速度较慢;图8c结构的PIL能实现数字平台的实时化,其运行速度更快,验证范围更广,是PCU软件数字化设计的新形式。
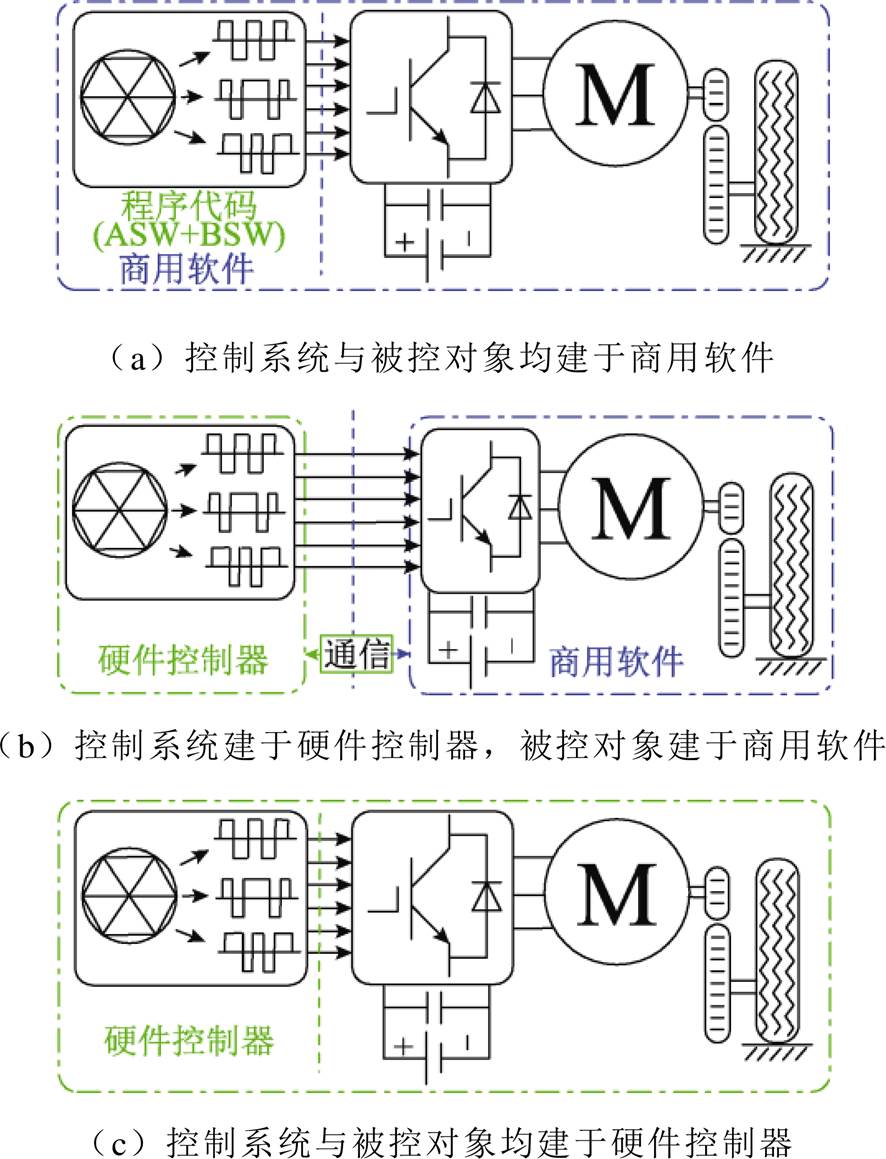
图8 电驱动系统处理器在环结构
Fig.8 PIL structure of electric drive system
此外,图8c结构的PIL能实现两大功能:脱离测试环境的单板仿真与结合实时控制的在线仿真。对于单板仿真,控制系统与被控对象在硬件控制器内形成在环仿真,能够摆脱对测试环境的依赖,对于现场应用和测试工具紧缺的环境具有独特的优势;对于在线仿真,控制系统一方面控制真实的被控对象,另一方面运行在环的虚拟被控对象,虚拟的物理对象相对真实的物理对象形成数字孪生[20](Digital Twins, DT)。虚拟孪生体根据实际物理对象的采样,实时校正在环仿真结果并更新孪生体的数学模型,其能超越物理传感器的限制,获取系统的中间物理状态,形成多源传感系统,优化控制器[21],以实现对系统的全局监控、状态预测和健康管理。
PIL由于其功能范围与其他结构的数字平台重叠,因此常被学术界与工业界忽视。但对于MBD的开发模式,由于核心代码自动生成,因此PIL对于程序代码的等效性及代码生成工具的正确性验证具有独特且重要的意义。另外,PIL对控制系统的贡献是数字化设计的新模式。但有限的计算资源与模型的保真度之间的矛盾,是其主要的挑战。
根据运行的功率等级,HIL分为信号硬件在环(Signal-HIL, S-HIL)与功率硬件在环(Power-HIL, P-HIL)。电驱动系统S-HIL的结构如图9所示,控制系统搭建在实际控制器中,被控对象搭建在实时仿真器中。
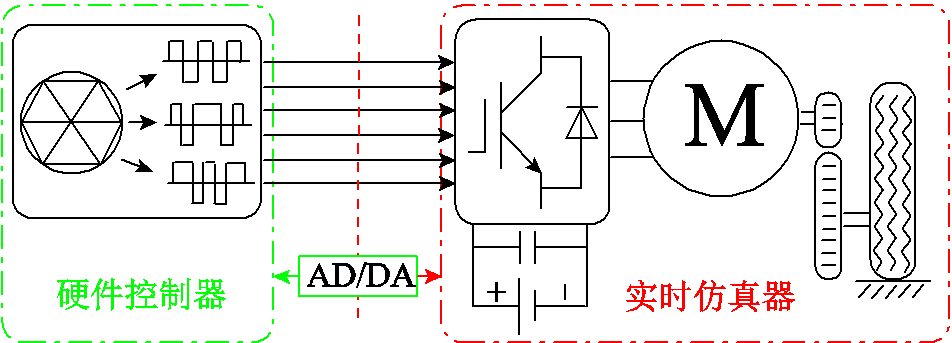
图9 电驱动系统信号硬件在环结构
Fig.9 S-HIL structure of electric drive system
S-HIL的验证范围同样包含硬件控制器,但与PIL不同,S-HIL的被控对象虚拟在实时仿真器里,如图10a所示。与其他离线的数字平台相比,S-HIL能够实现实时的数字化设计,因此对运算速度的约束要求更高。实时仿真器通常包含性能强大的计算内核,能够实现步长1μs以下的定步长实时计算[6,22],适合电力电子电路小时间尺度的数字化设计,如RT-LAB,dSPACE等。S-HIL在保真度、速度等方面均有强大的表现,是PCU数字化设计中最受关注的数字平台。但S-HIL通常需要定制化配置硬件资源和软件服务,导致其造价昂贵。

图10 硬件在环应用案例
Fig.10 Example of HIL application
P-HIL在硬件控制器的基础上,将验证范围扩大到功率级[15],其控制系统搭建在功率控制器中,被控对象搭建在同功率等级的功率放大电路中,而非实时仿真器里,电驱动系统P-HIL结构如图11所示。功率放大电路采用灵活与高效的电力电子拓扑,可以是PCU[23],如图10b所示[24],也可以是其他装置,如MMC[25]等。P-HIL能完成PCU软件及部分软硬件集成的设计验证,是良好的动力台架替代方案。AVL[26]与Scienlab[27]开发的工业级P-HIL,分别采用了多电平拓扑和共交流母线的功率循环结构作为功率放大电路,支持大功率高频电驱动系统的集成验证。与动力台架相比,其负载更加灵活,能够完成各种故障工况的测试,且更安全。由于P-HIL相当于在虚拟的数字侧与实际的物理侧增加了功放电路和传感电路,极大地引入不稳定源[28],受制于功率拓扑的结构和算法设计,P-HIL的高保真度模型和有限的运行边界,是其主要的设计挑战。
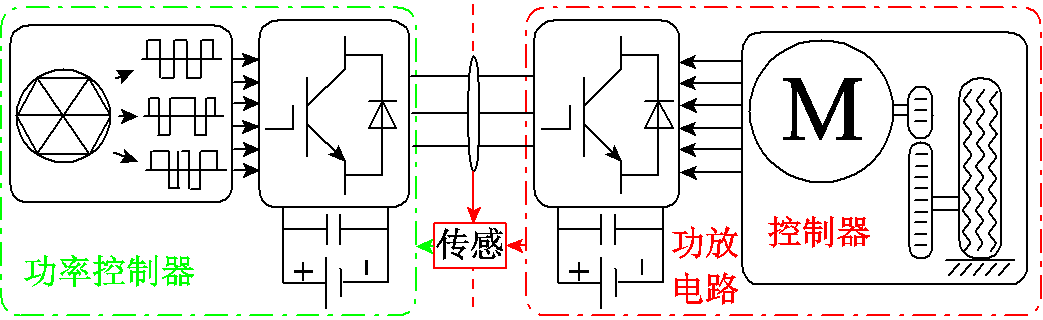
图11 电驱动系统功率硬件在环结构
Fig.11 P-HIL structure of electric drive system
针对PCU的数字平台综合比较见表1。数字平台由于在功能范围、保真度、速度、复杂度上的折中,导致单一的结构无法覆盖整个研发周期的所有设计验证需求,但基于数字化技术灵活的特点,能够将多种数字平台构建成数字工具链,以扩大PCU软件的设计验证范围,提高全研发周期的设计验证覆盖率,满足图3中V型设计软件开发各阶段的不同设计验证需求。
表1 数字平台的综合比较
Tab.1 Comprehensive comparison of digital platform
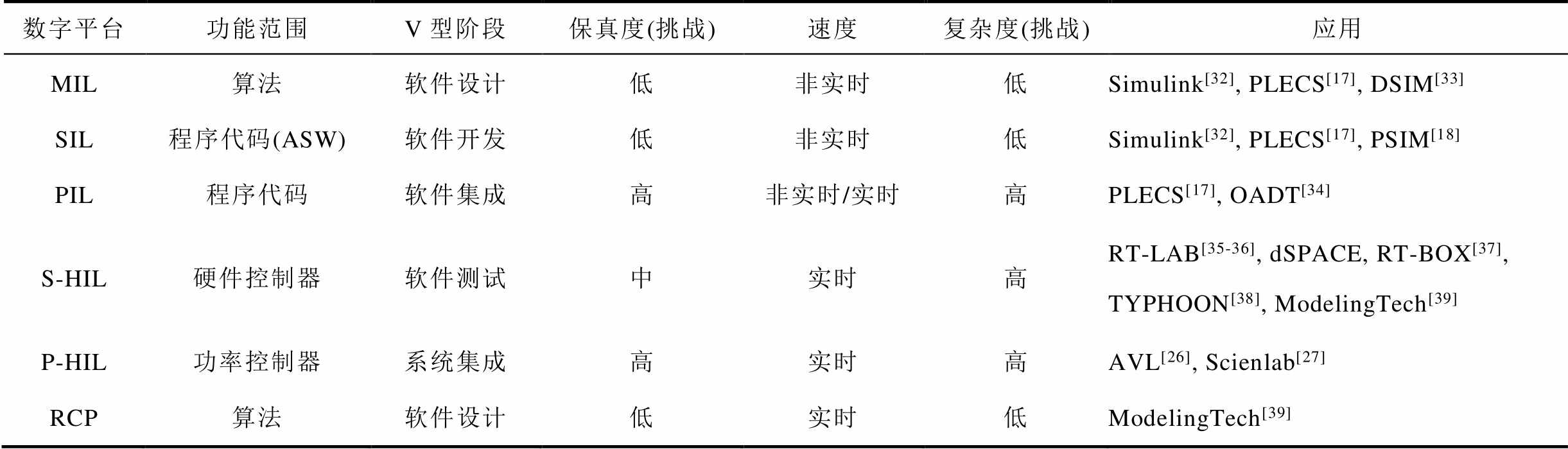
数字平台功能范围V型阶段保真度(挑战)速度复杂度(挑战)应用 MIL算法软件设计低非实时低Simulink[32], PLECS[17], DSIM[33] SIL程序代码(ASW)软件开发低非实时低Simulink[32], PLECS[17], PSIM[18] PIL程序代码软件集成高非实时/实时高PLECS[17], OADT[34] S-HIL硬件控制器软件测试中实时高RT-LAB[35-36], dSPACE, RT-BOX[37], TYPHOON[38], ModelingTech[39] P-HIL功率控制器系统集成高实时高AVL[26], Scienlab[27] RCP算法软件设计低实时低ModelingTech[39]
随着多核处理器CPU[29]、并行计算的GPU[30]、FPGA[31]与集成不同计算单元的片上系统(System on Chip, SOC),以及计算机集群在数字平台中不断被应用,数字平台的硬件技术朝着并行化、分布式的方向发展,极大地提升了数字平台的计算性能。PCU的数字化设计会朝着基于模型的开发理念,即V型的上层基于模型化,下层操作系统化。设计者仅需在顶层思考面向应用的设计,底层通过数字工具链完成自动化的设计验证。但目前,各阶段之间的数字平台大多彼此独立,衔接度不高,缺少整体的调度核心,导致上层的设计执行至下层可能并非全局最优,需要重新迭代,存在一定的局限性,数字化的计算资源没有被充分利用。因此设计面向全局优化的中控调度系统[9],综合统筹数字平台的一体化最优设计是未来的发展方向。
数学层面的建模将实际的物理对象抽象成节点矩阵和数学方程,是数字化设计的关键手段,典型的建模方法可分为时域和频域两类。电动汽车电驱动系统数学模型的性能取决于其关键子部件的建模,而功率变换器与电机是电驱动系统的核心,其建模方法最为关键。
功率变换器的开关切换特征导致其参数矩阵的维数随开关数的增加呈指数增长,是影响计算速度和保真度的关键。典型的开关建模方法按时间尺度分为电路级的二值阻抗法、恒值导纳法和开关平均法等;器件级的非线性建模法、分段线性瞬态建模法[40]、曲线拟合法以及准瞬态法等[22]。其中,器件级的建模方法描述非理想开关特性,适用于纳秒尺度的计算,但计算规模有限,本文不细作评述。
二值阻抗法用小阻抗和大阻抗分别等效开通和关断状态。考虑非理想度,大小阻抗的形式可以有区别:理想开关法开通阻抗为零,关断阻抗无穷大,受限于保真度,衍生出图12的开关电阻法[41],其开通时等效为小电阻Ron、小电感Lon和电压源Vf,并联大电阻Rs和大电容Cs;关断时等效为电阻Rs串联电容Cs。开关电阻法能提高开关动态的准确性,但不能避免开关切换引入的参数矩阵频繁变化的问题。因此为提升计算速度,常预先缓存遍历生成的参数矩阵,以避免过度的计算量,但也存在开关数量增长引起的缓存容量的风险。对此,模块化开关电阻法[42]在系统中对状态量不会突变的电感电流或电容电压进行模型分割,以此为矩阵降阶。
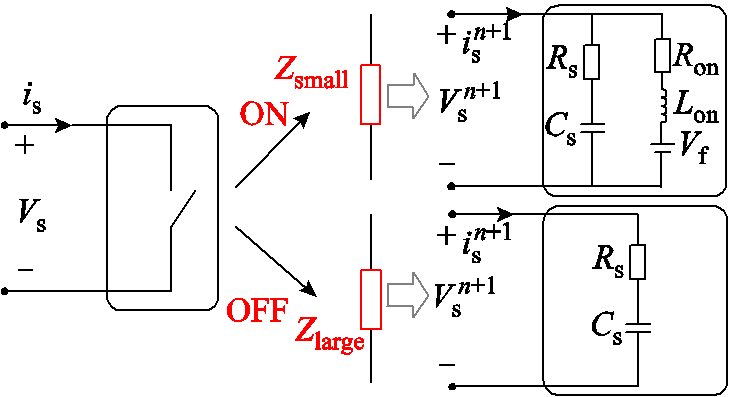
图12 二值阻抗法
Fig.12 Binary impedance method
为避免开关切换引入的参数切换,恒值导纳法提出用受控电流源并联电导Gs的形式等效开关行为[43],也称电流源等效法或L/C法,恒值导纳法如图13所示,其开通时等效为历史电流源并联电感L;关断时等效为历史电流源并联电容C,但在数学上不改变电导Gs的形式。通过选取合适的Gs值使得开关切换时L与C的值相等,以此避免参数矩阵的变化,优化计算速度。恒值导纳法通用性好,计算量固定,但参数Gs选择不当会引入建模误差甚至导致数值稳定问题,特别是在开关频率较高的碳化硅PCU中,电感电容存储的能量随开关切换被清零,导致偏差加大。传统方法将此类误差迁移等效为开关损耗,但高频下开关损耗不规律增加,需要通过设计合适的数值求解算法,以削弱参数选择不当带来的影响[44-45]。
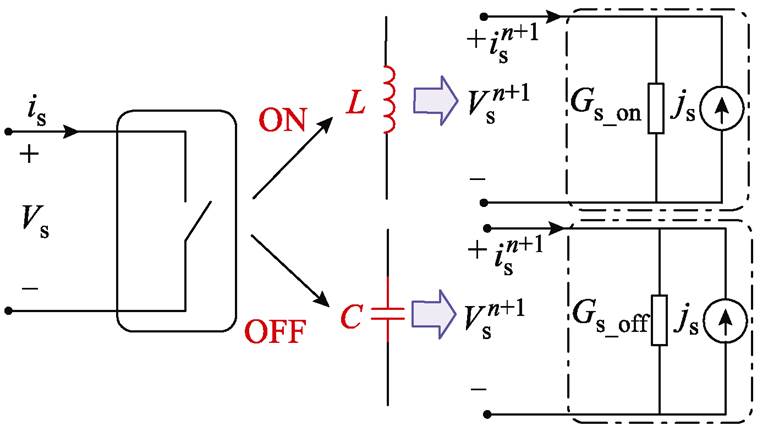
图13 恒值导纳法
Fig.13 Constant admittance method
为了保证一定的动态精度,二值阻抗法与恒值导纳法对速度的提升有限,且增加了建模复杂度。基于此,开关函数法[46]将开关建模成与开关函数相关的受控电压电流源,在获得与理想开关同等精度的同时,简化计算以提升速度。在此基础上,开关平均法[46]进一步忽略开关动态过程,利用一段PWM周期,通过周期平均等效详细模型的平均动态过程,以减小开关事件处理过程所带来的巨大计算量,大大提升计算速度。开关平均法建模简单、速度快,但计算步长较大、精度有限,且需要预先知道电路拓扑,不适用任意拓扑的建模,但对于电机驱动等拓扑固定的应用,是提升运算速度的有效方法。开关模型的时域建模方法综合对比见表2。
表2 开关模型的时域建模方法对比
Tab.2 Comparison of time-domain switch models

建模方法保真度速度复杂度典型应用 查表法很高很快高离线 非理想开关[22]很高很慢很高离线 二值阻抗法[37-38]高慢中离线、实时 恒值导纳法[39-41]中中中离线、实时 开关函数法[42]低快很低离线 开关平均法[42]很低快很低离线
电机作为电驱动系统另一大关键部件,电动汽车中广泛采用体积小、效率高的永磁同步电机[47],其典型的方法可分为集总参数法和物理数据法两类。集总参数法根据定转子的建立形式可分为相域法(Phase-Domain, PD)或变电感反电动势法(Voltage Behind Reactance, VBR)[48-49]、交直轴法(Direct Quadrature, DQ)[14]、理想旋转变压器法(Ideal Rotating Transformer, IRTF)[50]等;物理数据法根据数据的获取来源可分为有限元法(Finite Element Method, FEM)、磁路等效法(Magnetic Equivalent Circuit, MEC)[51]和实验数据标定法等。
基于集总参数的PD法将电机的定、转子变量均建立在静止侧,是电机初始的模型。VBR在PD法的基础上,将电机等效成可变电感连接反电动势,因此能与外部任意电路直连,如开路或整流桥等,避免了数值无法迭代的问题,但由于相间电感耦合,模型的复杂度大幅提高。DQ法将电机的定转子变量通过Park变换至旋转侧,能够将交变的状态量转变成恒定,以此简化模型,是广泛采用的方法,但DQ法在外部接口处,于大步长下存在数值稳定问题[14],且在开路情况下无法配合任意电路的计算。IRTF法分别将定子变量建立在静止侧,转子变量建立在旋转侧,通过磁链实现动静的分割,永磁同步机的IRTF模型如图14所示,在简化建模的同时,保证数值稳定。总之,集总参数法建模直接、速度快,但通常参数不可靠,无法反映电感饱和、交叉耦合、空间磁动势谐波等现象,具有一定的局限性,需在模型局部进行二次优化。
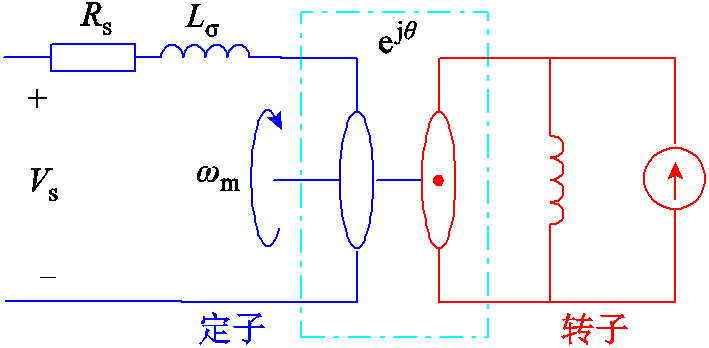
图14 永磁同步机的IRTF模型
Fig.14 IRTF model of PMSM
物理数据法通过查表的方式,将负载电机非线性、强耦合的特征反映至数字系统中,以此减小参数不准确的影响。有限元法和磁路等效法考虑多场交互,将电机模型划分为有限个互联的微单元,通过离线求解每个微单元的偏微分方程,获取多物理场的近似解数据,永磁同步机磁路等效法示意如图15所示,提升保真度的同时求解速度过慢,适用于离线的预计算。实验数据标定法直接通过动力台架实验,针对影响模型与参数的关键物理量建立映射表格,因此能够还原永磁同步电机电感饱和、交叉耦合、齿槽空间谐波等非线性问题。总之,物理数据模型数值精度更高,但核心的数据获取较为繁琐,对于高度耦合的电机模型,会造成表格维数的增加,大大增加资源占用。
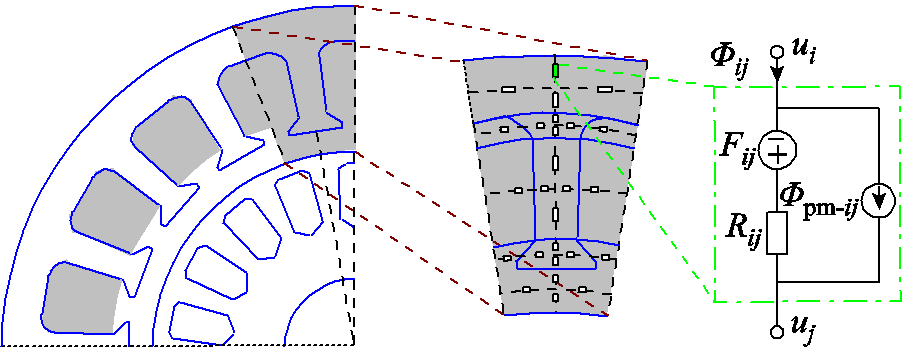
图15 永磁同步机磁路等效法示意图
Fig.15 Magnetic equivalent circuit of PMSM
时域方法建模精度高,但速度提升有限。基于频域的建模方法通过将时域信号转换至频域,物理对象建立成频域方程,二者相互作用获得频域的响应,再逆变换至时域。典型的频域建模方法包含动态相量[52-53](Dynamic Phasor, DP)法及移频分 析[30,48,54](Shifted Frequency Analysis, SFA)法。
动态相量法通过对时变信号的傅里叶分解,保留幅值较大的主要分量,忽略次要分量,根据需要有目的地选择主导频率分量的系数,构造一组平均值信号的微分方程来等效开关暂态过程,动态相量法示意如图16所示。动态相量法可以根据需要的精度近似时域模型,能够在保证精度的前提下,将时变的信号转化为非时变的信号,支持电力电子电路的低频暂态还原,因此可以加大计算步长以提升计算速度。但由于谐波截断误差的存在,当系统中谐波成分较多且比例较大时,模型精度将是一大挑战。
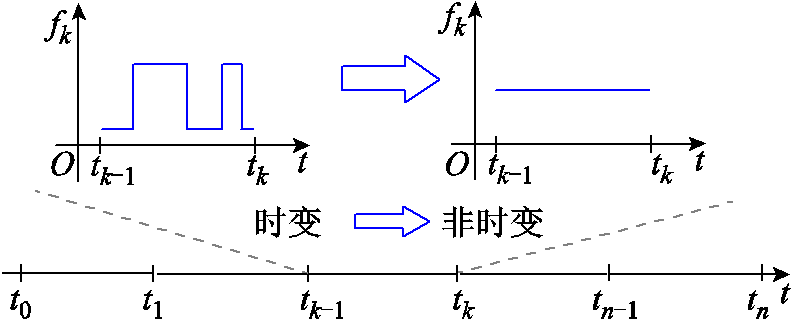
图16 动态相量法示意图
Fig.16 Diagram of dynamic phasor method
SFA将系统中的工频量等效为以工频正弦波为载波调制后的带通信号,进而通过希尔伯特变换,将传统时域信号无损变换为只含单边频谱的复数解析信号。对解析信号的频谱向左平移一个固定频率,使原本按正弦周期变化的交流信号转为缓慢变化的解析包络信号,如图17所示。由于解析包络中的最大频率小于原始真实信号,因此可选择更大的步长加快计算速度,从而实现高效的低频暂态计算。类似地,SFA只适用于以工频为主导频率、系统变工频或含有高次谐波时,模型精度仍是一大挑战。
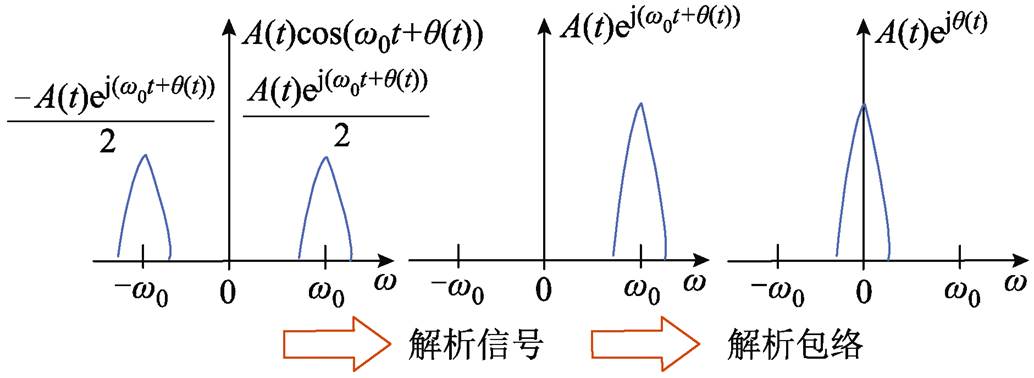
图17 移频分析法示意图
Fig.17 Diagram of shifted frequency analysis method
围绕时域与频域建模方法的对比如图18所示,其中时域的方法建模精度高,对于非理想特性的模拟具有一定的自由度,但常受到模型速度和复杂度的限制;频域的方法对于稳态分量求解迅速,对于暂态分量通过加大步长提升计算速度,效果明显,但对于实时系统严格的时间约束,频繁的时频变换不适用于实时的数字平台。同时,基于频域的变换需保证时域系统为线性非时变系统,因此针对电力电子开关和电机的参数饱和等非线性时变特征需要特殊的优化。现有方法在精度和速度方面做了相关的优化,但二者之间的矛盾没有从根本上解决。随着电动汽车中碳化硅等高频器件的应用[3],加之实时的数字平台对计算速度的严格约束,计算速度与精度的矛盾将进一步突显。符合数字平台并行化、分布式特征的快速建模方法,特别是对频率最为敏感的开关元件,其建模方法亟待进一步研究。
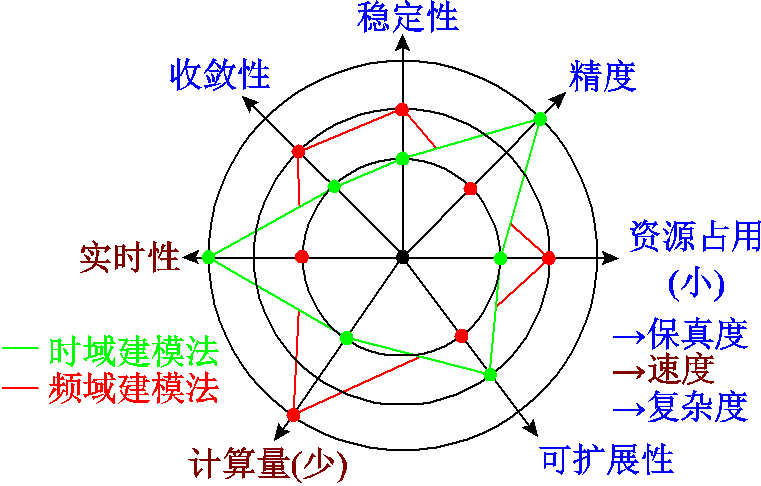
图18 时域与频域建模方法对比
Fig.18 Comparison between time-domain and frequency-domain modeling method
数值算法在数学模型的基础上,从数值计算的角度求解运行结果和优化系统性能,是数字化设计的核心。数值算法解算的关键在于算法结构、步长算法、数值求解三个方面。算法结构将系统中各环节的数学模型组成通用的求解架构,由步长算法此架构上定义循环计算的方式,最后通过数值求解方法在定义好的方式下进行离散的迭代计算。
算法结构是数值算法的基础,即以合理的架构将数学模型组织成适合数值求解的通用流程。典型的是以Simulink软件中Sim Power Systems为代表的状态变量法[55]和以电磁暂态类软件EMTP为代表的节点分析法[56],算法结构原理图如图19所示。
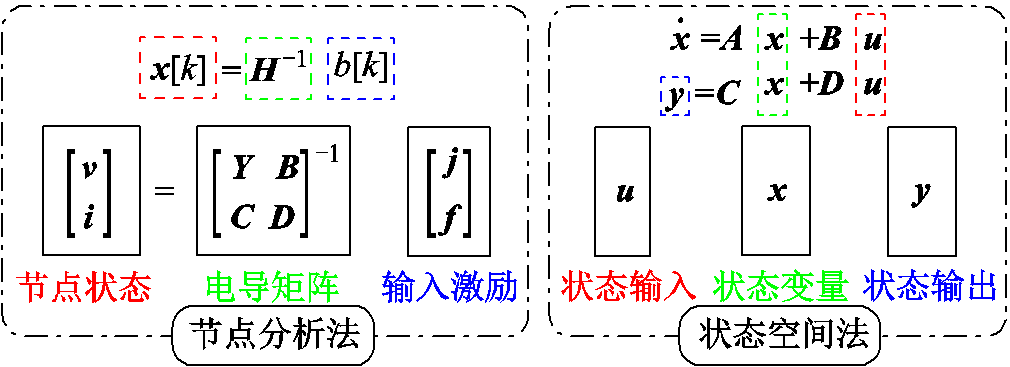
图19 算法结构原理图
Fig.19 Schematic diagram of algorithm architecture
状态变量法根据不发生突变的状态变量建立方程,然后通过数值积分迭代求解状态变量,状态变量法结构示意如图20所示。因此对存在非线性元件、时变的系统容易建立状态方程,且数值积分方法选择灵活,可对不同类型的系统进行针对性求解,但对于大规模系统,其状态方程形成困难,且会丢失电路原本的稀疏性,导致计算速度慢,因此面对状态变量多、复杂度高的系统,求解难度大、扩展性差。
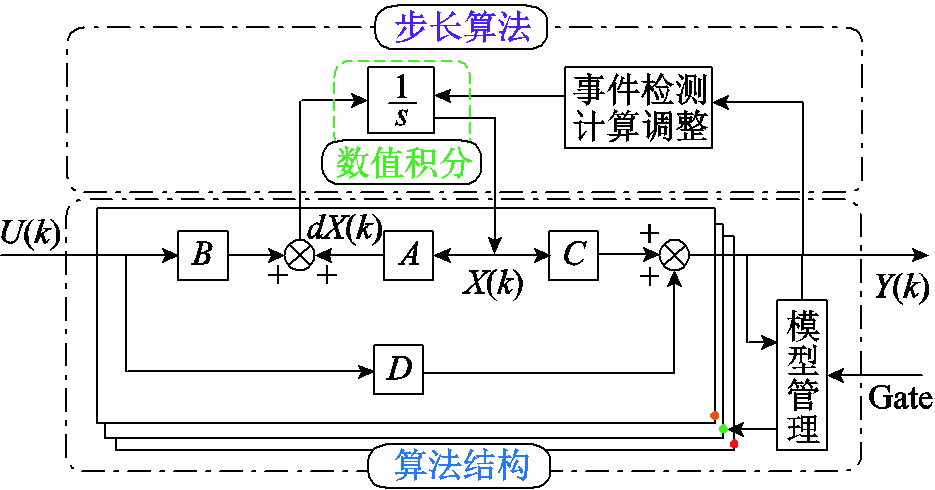
图20 状态变量法结构示意图
Fig.20 Schematic diagram of state variables method
节点分析法首先将状态元件通过数值积分法离散成历史项电流源并联电导的诺顿等效电路形式,然后根据节点位置建立差分方程,并迭代求解。其易于形成节点方程,能够保留电路结构信息,速度较快,面对节点多、复杂度高的大规模系统,具有一定的优势,但元件的首先离散限制了对数值积分方法的选取,精度高的方法会造成离散后的差分方程太复杂,精度低的方法会存在数值不稳定的风险,因此以刚性隐式的梯形法为主体的数值积分法几乎是节点分析架构下最好的选择。对于非线性元件,特别是电力电子装置,开关动作引起的系统拓扑变化会影响此类算法结构的计算效率。
步长算法按照算法结构的框架,定义了模型中方程的计算方式,对模型求解的保真度和速度影响显著。随着电驱动系统的高频化,对上述两个指标将更为敏感。根据定义步长的方式不同,典型的方法分为基于时间离散和基于事件离散的步长算法。
基于时间离散的步长算法包含定步长与变步长两类。定步长算法采用固定的时间步进行数值计算,计算速度与误差大小由时间步长控制,适用于实时的数字平台,但其步长的选取通常面临速度与精度之间的矛盾。变步长算法由于存在误差控制机制,步长随着计算过程的误差大小而自动调整,因此其在精度和速度上具有综合的优势,是离线数字平台的常用算法。基于时间离散的步长算法几乎在每个时间步的计算过程中都会产生截断误差,进而带来数值不稳定的风险。数值稳定性表征数值误差随时间的衰减特性,在PCU中,一方面由于电力电子开关时刻的不确定,步长间隔会引入误差;另一方面由开关引起的电感电容等元件的数值切换,非状态量的突变可能引发数值振荡[57]。因此加剧了此类步长算法特别是定步长算法在保真度方面的风险。
为了优化基于时间离散步长算法的稳定性,针对开关时刻的不确定有小步长积分和开关插值[56]等方法;针对状态元件的数值切换有临界阻尼[41]等方法。小步长积分法在开关动作的步长内改用更小的积分步长,以准确捕获开关信号,减小数值误差,但也会牺牲更多的计算时间。开关插值法在步长区间内采用线性拟合的方式还原开关时刻,通过插值来求解各个状态量至开关动作前的值,在步长较小的情况下简单有效,在步长较大或精度需求较高的场合,需要优化插值的方式,以提高准确性[57]。临界阻尼法不从误差累积源的角度出发,而是从振荡抑制的角度,在数值求解上利用显隐式积分稳定域和收敛性的互补,当发生误差扰动时,在间断点改用两个半步长的后向欧拉法抑制振荡。临界阻尼法会增加算法复杂度,同时带来切换条件识别不准等额外的风险。
基于事件离散的步长算法主要为离散状态事件驱动法(Discrete-State Event Driven, DSED),其演变于量化状态系统[58](Quantized State Systems, QSS)。基于时间离散步长算法由于在一定硬件资源限制下存在天然的保真度与速度的矛盾,而对于应用场景复杂、计算规模大的场合,矛盾越发明显。特别是计算规模增加带来的收敛性问题,系统中由于存在时间常数差别很大的解分量,从而造成系统的刚性,在时间步长的求解框架下难以通过有限的迭代趋于真实解,或趋于真实解的速度过慢导致求解失败。在电驱动系统中,由于PCU存在ms级的电力电子回路和秒级的机械回路,以及电力电子开关本身相差极大的关断导通阻抗,具有刚性系统的特征。为弥补基于时间离散步长算法的缺陷,DSED将系统求解视角从时间轴转换为事件状态轴[59-60],时间离散与事件状态离散机理比较如图21所示,具有变步长的性质,因此也仅适合于离线的数字平台。DSED通过开关事件来自动触发计算,可省去繁琐的事件检测与迭代计算,从而大大降低计算量,加快计算速度,且收敛风险小,对于大规模和多时间尺度的数字化设计具有其独特的优势,但对于刚性过强的系统,也会面临效率低下等问题。
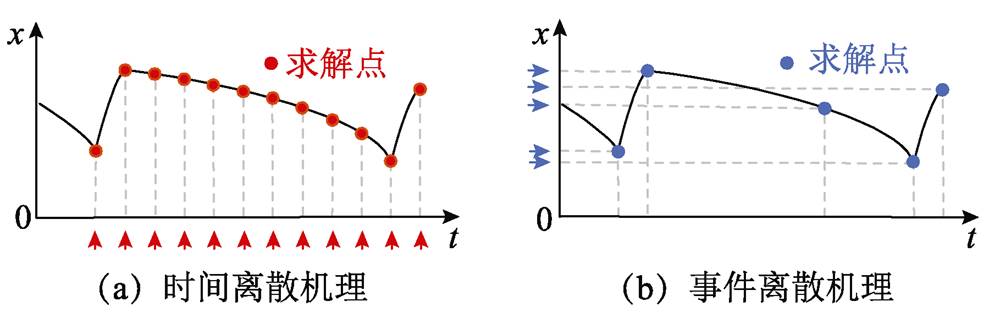
图21 时间离散与事件状态离散机理比较
Fig.21 Comparison between time discretization and event state discretization simulation framework
数值求解方法在已有的算法结构下,结合步长算法对数学方程进行离散的迭代求解。在状态空间的算法结构下,常微分方程的数值积分求解是计算效率的关键;在节点分析的算法结构下,线性方程组的求解是计算效率的关键。在电驱动系统中,以常微分方程为主、线性方程组为辅,是主要的数学模型特征,因此其求解方法是整个数值求解的核心。
常微分方程基于泰勒级数展开[61],通过合理截断级数的高阶项,获取迭代的差分方程,以完成积分的数值求解。根据迭代的方式、级数保留的阶数、历史项的步数,数值积分有显/隐性、低/高阶、单/多步之分。其中,阶数和步数会影响积分方法的精度,但显隐性对保真度的影响更为关键。显式方法根据历史时刻的状态值直接更新当前时刻的状态值,如前向欧拉等;而隐式方法需要通过迭代间接解出当前时刻的状态值,如后向欧拉和梯形积分等。显式方法简单直接,收敛风险小,但由于截断误差的累积存在稳定性的风险,因此步长的选取较为关键。隐式方法采用当前时刻的导数值,能够保证误差的衰减,对数值振荡有一定的阻尼抑制作用,因此稳定性好,对步长不敏感,但其迭代的次数不固定,对于实时的应用需要综合考虑,且可能存在病态方程等迭代不收敛的风险。为从根本上避免截断误差引发的数值振荡,指数差分法和根匹配法[31]通过构造指数形式的迭代方程以等效所有的泰勒级数项,由于增加了复杂度,需进一步讨论。
方程组的数值求解包含直接法与迭代法。直接法通过对矩阵的求逆运算获取方程组的解,精度高且稳定可靠,没有收敛问题,但运算量大且对硬件的存储需求高,典型的方法包括以高斯消元法为代表的消元法和以三角分解为代表的矩阵分解法。迭代法通过给定初值并迭代逼近真实解,避免了效率低下的矩阵求逆运算,计算速度快且存储量小,但牺牲了计算精度且存在收敛问题,典型的方法包含雅克比迭代、高斯赛德尔迭代、超松弛迭代等。从矩阵本身的特点出发,利用其稀疏性和对称性进行数值加速与等效分割是目前研究的焦点。总之,方程组的数值求解方法研究较为充分,在此不做赘述。
数值算法目前围绕高保真度、高速、低复杂度三大目标,形成了以求解微分方程与线性方程组为核心的较为成熟的数值解法。然而电驱动系统作为典型的电力电子系统,其混合了连续状态与离散事件且具备多时间尺度的特征[12],传统数值算法在其上的应用并非为最优效率,通常为了补偿稳定性与收敛性等问题牺牲速度等指标,降低了效率。现有的方法针对电力电子系统的特征作了一定的优化,目前还处于早期应用的阶段。从算法结构上设计新的求解架构,并配合步长算法与数值求解对象的转换,是数值算法上仍需进一步研究的内容。
电动汽车的高安全性和高可靠性给其核心子部件PCU的设计带来了功能范围高覆盖率和验证环节高效率两方面的挑战。数字化设计灵活高效与低成本,是满足上述挑战的有效途径。然而,受限于硬件资源的计算力、存储和带宽,提高数字化设计在PCU中的应用程度,目前面临的挑战归纳如下:
1)数字平台的自动集成。数字平台在V型设计的分层设计、层次嵌套的流程中起到十分关键的效率提升作用,是实现设计验证自动化的关键环节。但目前各阶段之间的数字平台大多彼此独立,衔接度不高,设计验证存在低效的重复迭代,缺乏一个综合的大脑,数字化的计算资源没有被充分利用。因此设计衔接集成不同阶段数字平台的中控系统,面向全局优化自动迭代,是未来电驱动系统乃至电力电子系统数字化设计的研究挑战。
2)数学建模的速度提升。碳化硅等高频器件的应用,将PCU软件数字化设计推向了微秒级别以下的时间尺度,加之实时、在线的应用本身对速度的约束十分严格,进而对计算速度提出了更高的要求。随着时间尺度变小,对频率最为敏感的开关元件,其模型保真度与速度间的矛盾将逐渐加深,亟需进一步的创新。因此探索从数字平台的硬件升级、数学建模的等效分割到数值算法的并行加速三个维度的综合优化方法,是未来数字化设计的重要方向。
3)数值算法的求解创新。电驱动系统混合了连续状态与离散事件,加之其高频化趋势的不断加深,使其时间尺度的跨度逐渐加大,刚性问题愈发严重,数学特征的变化使传统数值算法的匹配应用效率有限。因此从算法结构上设计新的求解架构,并配合步长算法与数值求解的优化,是数值算法在电驱动应用场景下仍需进一步研究的内容。
4)数值稳定的综合优化。随着电动汽车体量的不断增长,电驱系统软件设计的方案各异,加之电动汽车复杂运行场景下状态机的频繁切换,势必对数值稳定性的范围和兼容性提出了更高的要求。因此,需要系统性地构建能反映数值稳定的综合判定方法及其优化方法,扩大数字化设计的数值稳定域。
实现电动汽车功率控制器乃至电力电子装置的数字化设计,需要分步完成数字平台的自主研发、中控系统的衔接集成、自动迭代的智能系统。当前,面对国内外技术进程的差距与技术封锁的国际形势,数字平台的自主研发是数字化设计的基础与核心,也是抓住工业国产化趋势与机遇的关键。S-HIL作为数字平台构建数字工具链的重要一环,是自主研发的难点,以S-HIL作为切入点,探索制约数字平台的共性技术问题是发展数字化设计的基础。以S-HIL为例,系统包含物理侧的实际控制器与数字侧的HIL以及观测设备。HIL包含上位机、数字平台和转接电路,如图22所示。其中数字平台的硬件环境采用CPU+FPGA的结构,分别通过两块集成板卡经PXIe的背板总线连接。在数学建模上,首先将多时间尺度的电驱动系统进行解耦粗分割,秒级时间尺度的机械模型在CPU中完成,微秒级的电力电子模型在FPGA中完成,以此降低系统的刚性;其次在采样和模型上根据计算特征和资源匹配做进一步的协同优化,利用CPU多核与FPGA并行运算的特点,将模型细分为适合并行及流水线运算的模型,以匹配高频化的小步长运算,并同时优化小步长瓶颈的开关模型,提高保真度。在数值算法上,完成模型解算的同时,通过并行等效、串行计算向量化以及串行同步转异步并行等方式对数值求解进行加速,并利用数字侧的高自由度与灵活性,优化数值增长因子和奈奎斯特稳定,提高数值稳定域。
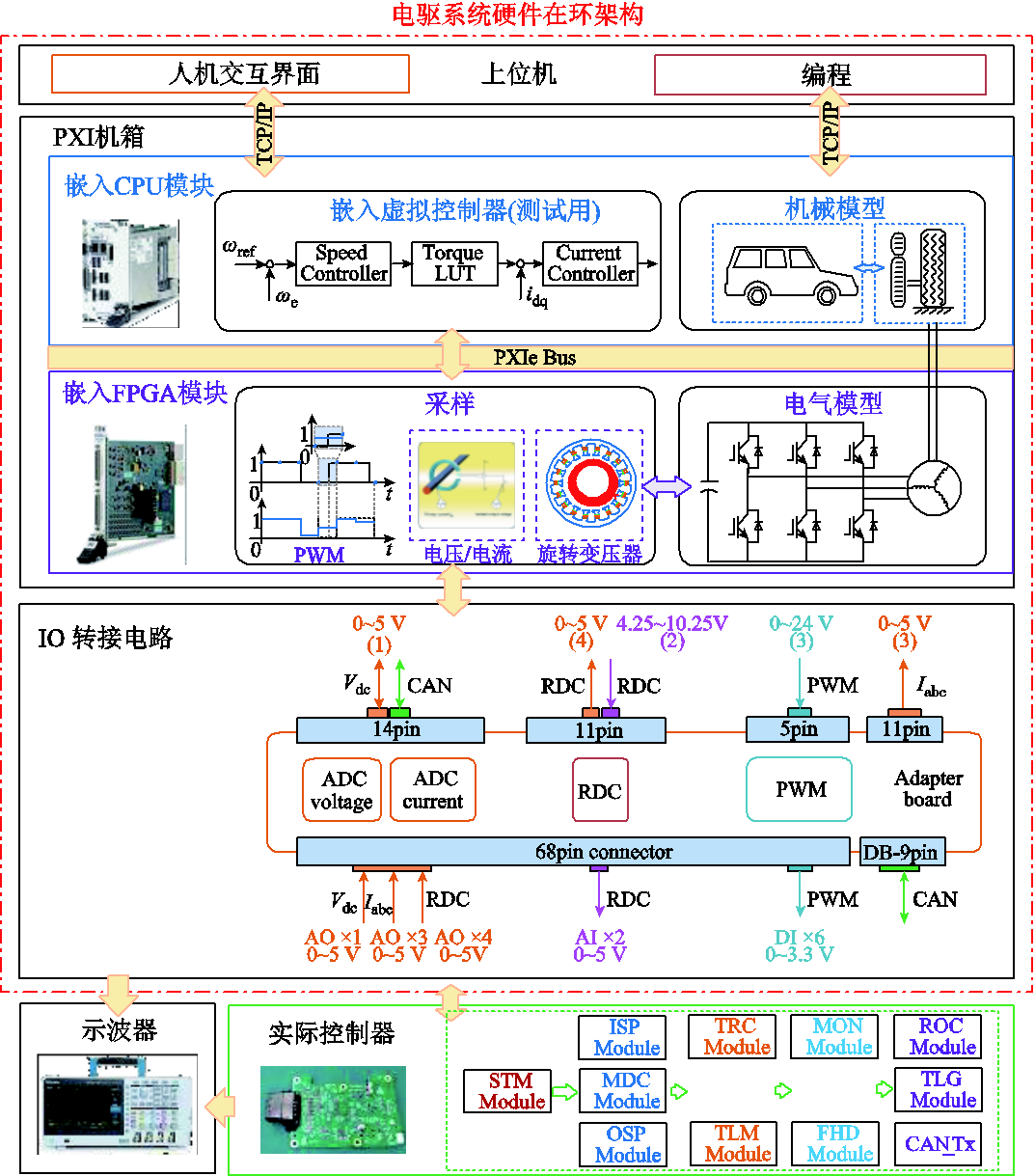
图22 信号硬件在环系统架构
Fig.22 System structure of S-HIL
随着未来计算能力和数据能力的提升,数字化设计将会具有更进一步的应用前景。计算能力的提升使得数字化设计不会仅仅局限在对实际系统的辅助设计验证,同时扩大数字平台的范围至车辆在环(vehicle in the loop)甚至人在回路(human in the loop),利用数字系统与实际系统的实时联动,提升对物理系统的认知、诊断和预测。数据能力的提升将能应对汽车层面的复杂性和不确定性,提升系统的智能化水平,为电动汽车的发展带来更深刻的影响。
电动汽车的高安全性和高可靠性给PCU的设计验证带来了功能范围高覆盖率和验证环节高效率的挑战。数字化设计利用其灵活、高效、智能的特点,通过合理变换PCU控制系统与被控对象的数字化方式,以覆盖PCU软件从控制算法到功率单元全研发周期的宽范围设计验证需求;通过数学建模和数值算法的优化,提升数字化设计的速度和保真度,满足PCU每个设计验证环节的高效率。
本文以电动汽车PCU软件数字化设计为切入点,围绕其高覆盖率和高效率的设计验证需求,从数字平台、数学建模、数值算法三方面系统性地梳理了数字化设计的研究进展:整理归纳了PCU设计验证的数字平台构造方法;论述总结了提升计算速度和保真度等影响设计验证效率的建模方法和数值算法。通过归纳总结表明,随着数字平台的硬件朝着并行化、分布式方向的发展,数字化设计呈现从离线到实时到在线的趋势,以满足PCU设计验证需求高覆盖率的同时,实现高性能控制;由于高频化趋势的日益加深,计算时间尺度变小变宽,围绕速度与保真度的优化,数学建模特别是开关模型亟待根据计算特征和资源匹配作进一步的协同优化,数值算法在处理数值稳定和刚性问题上有待进一步探索。最后展望了PCU数字化设计未来的发展趋势,希望本文的工作能为同行们的后续研究提供参考。
参考文献
[1] International Energy Agency. Global EV outlook 2020[Z]. 2020.
[2] 吴理豪, 张波. 电动汽车静态无线充电技术研究综述(上篇)[J]. 电工技术学报, 2020, 35(6):1153-1165.
Wu Lihao, Zhang Bo. Overview of static wireless charging technology for electric vehicles: part Ⅰ[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1153-1165.
[3] 张栋, 范涛, 温旭辉, 等. 电动汽车用高功率密度碳化硅电机控制器研究[J]. 中国电机工程学报, 2019, 39(19): 5624-5634, 5890.
Zhang Dong, Fan Tao, Wen Xuhui, et al. Research on high power density SiC motor drive controller[J]. Proceedings of the CSEE, 2019, 39(19): 5624-5634, 5890.
[4] 张军, 张犁, 成瑜. IGBT模块寿命评估研究综述[J].电工技术学报, 2021, 36(12): 2560-2575.
Zhang Jun, Zhang Li, Cheng Yu. Review of the lifetime evaluation for the IGBT module[J]. Transa- ctions of China Electrotechnical Society, 2021, 36(12): 2560-2575.
[5] 赵争鸣, 袁立强, 鲁挺. 电力电子系统电磁瞬态过程[M]. 北京: 清华大学出版社, 2017.
[6] Bélanger J, Venne P, Paquin J N. The what, where, and why of real-time simulation[J]. Planet RT, 2010, 1(1): 37-49.
[7] 袁立强, 陆子贤, 孙建宁, 等. 电能路由器设计自动化综述—设计流程架构和遗传算法[J]. 电工技术学报, 2020, 35(18): 3878-3893.
Yuan Liqiang, Lu Zixian, Sun Jianning, et al. Design automation for electrical energy router-design work- flow framework and genetic algorithm: a review[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3878-3893.
[8] Hermanns K, Peng Y, Mantooth A. The increasing role of design automation in power electronics: gathering what is needed[J]. IEEE Power Electronics Magazine, 2020, 7(1): 46-50.
[9] 袁立强, 陆子贤, 戴宇轩, 等. 高性能电力电子设计自动化求解器关键因素与解决方法[J]. 中国电机工程学报, 2021, 41(20): 7055-7068.
Yuan Liqiang, Lu Zixian, Dai Yuxuan, et al. Key factors and methodology of high-performance design automation solver for power electronics[J]. Proceedings of the CSEE, 2021, 41(20): 7055-7068.
[10] Vardhan H, Akin B, Jin H. A low-cost, high-fidelity processor-in-the loop platform: for rapid prototyping of power electronics circuits and motor drives[J]. IEEE Power Electronics Magazine, 2016, 3(2): 18-28.
[11] Zhu W, Pekarek S, Jatskevich J, et al. A model- in-the-loop interface to emulate source dynamics in a zonal DC distribution system[J]. IEEE Transactions on Power Electronics, 2005, 20(2): 438-445.
[12] 施博辰, 赵争鸣, 朱义诚, 等. 电力电子混杂系统多时间尺度离散状态事件驱动仿真方法[J]. 中国电机工程学报, 2021, 41(9): 2980-2990.
Shi Bochen, Zhao Zhengming, Zhu Yicheng, et al. Discrete-state event-driven simulation approach for multi-time-scale power electronic hybrid system[J]. Proceedings of the CSEE, 2021, 41(9): 2980-2990.
[13] Demers S, Gopalakrishnan P, Kant L. A generic solution to software-in-the-loop[C]//IEEE Military Communications Conference (MILCOM), Orlando, FL, USA, 2007: 1-6.
[14] Mojlish S, Erdogan N, Levine D, et al. Review of hardware platforms for real-time simulation of electric machines[J]. IEEE Transactions on Trans- portation Electrification, 2017, 3(1): 130-146.
[15] Upamanyu K, Narayanan G. Improved accuracy, modeling and stability analysis of power-hardware- in-loop simulation with open-loop inverter as power amplifier[J]. IEEE Transactions on Industrial Elec- tronics, 2020, 67(1): 369-378.
[16] Shen Jie. Modeling methodologies for analysis and synthesis for controls and modulation schemes for high-power converters with low pulse ratios[D]. Verlag: E.ON Energy Research Center, RWTH Aachen University, 2013.
[17] Plexim GmbH: PLECS user manual[EB/OL]. Zurich, Switzerland: Plexim GmbH, 2021[2021-08-29]. https:// www.plexim.com/download/documentation.
[18] POWERSIM Inc.: PSIM user’s guide[EB/PL]. USA: Powersim Inc., 2021[2021-08-29]. https://powersimtech. com/support/resources/tutorials/psim-user-manual/.
[19] Ruba M, Nemes R O, Ciornei S M, et al. Digital twin real-time FPGA implementation for light electric vehicle propulsion system using emr organiza- tion[C]//2019 IEEE Vehicle Power and Propulsion Conference (VPPC2019), Hanoi, Vietnam, 2019: 1-6.
[20] 周二专, 冯东豪, 严剑峰, 等. 秒级响应电网在线分析软件平台[J]. 电网技术, 2020, 44(9): 3474-3480.
Zhou Mike, Feng Donghao, Yan Jianfeng, et al. A software platform for second-order responsiveness power grid online analysis[J]. Power System Tech- nology, 2020, 44(9): 3474-3480.
[21] 贺兴, 艾芊, 朱天怡, 等. 数字孪生在电力系统应用中的机遇和挑战[J]. 电网技术, 2020, 44(6): 2009-2019.
He Xing, Ai Qian, Zhu Tianyi, et al. Opportunities and challenges of the digital twin in power system applications[J]. Power System Technology, 2020, 44(6): 2009-2019.
[22] Hao Bai, Chen Liu, Breaz E, et al. A review on the device-level real-time simulation of power electronic converters: motivations for improving performance[J]. IEEE Industrial Electronics Magazine, 2021, 15(1): 12-27.
[23] 杨庆文, 何绍民, 杨欢, 等. 考虑故障特性模拟的虚拟电机系统及其控制[J]. 电工技术学报, 2020, 35(6): 1239-1250.
Yang Qingwen, He Shaomin, Yang Huan, et al. Virtual motor system considering fault characteristic simulation and its control strategy[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1239-1250.
[24] Wang Bin, Ma Kai, Huang Xin, et al. Fault injection test for MCU based on e-motor emulator[C]//2019 2nd International Conference on Information Systems and Computer Aided Education (ICISCAE), Sanya, China, 2019: 267-269.
[25] Saito K, Akagi H. A real-time real-power emulator of a medium-voltage high-speed induction motor loaded with a centrifugal compressor[J]. IEEE Transactions on Industry Applications, 2019, 55(5): 4821-4833.
[26] Liebig S, Schmitt A, Hammerer H. High-dynamic high-power e-motor emulator for power electronic testing[C]//International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management (PCIM Europe 2018), Nuremberg, Germany, 2018: 1-5.
[27] Oettmeier M, Bartelt R, Heising C, et al. Power- electronic-based machine emulator for high-power high-frequency drive converter test[C]//2010 IEEE Vehicle Power and Propulsion Conference, Lille, 2010, DOI: 10.1109/VPPC.2010.5728988.
[28] Ren W, Steurer M, Baldwin T L. Improve the stability and the accuracy of power hardware- in-the-loop simulation by selecting appropriate interface algorithms[J]. IEEE Transactions on Industry Applications, 2008, 44(4): 1286-1294.
[29] 汤涌. 电力系统数字仿真技术的现状与发展[J]. 电力系统自动化, 2002, 26(17): 66-70.
Tang Yong. Present situation and development of power system simulation technologies[J]. Automa- tion of Electric Power Systems, 2002, 26(17): 66-70.
[30] Shu Dewu, Wei Yingdong, Dinavahi V, et al. Cosimulation of shifted-frequency/dynamic phasor and electromagnetic transient models of hybrid LCC-MMC DC grids on integrated CPU-GPUs[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6517-6530.
[31] 王智颖. 基于多FPGA的有源配电网可扩展实时仿真方法与系统设计[D]. 天津: 天津大学, 2018.
[32] The MathWorks, Inc.. Simulink user’s guide[EB/OL]. Natick, MA: The MathWorks, Inc., 2021[2021-08-29]. https://www.mathworks.com/help/pdf_doc/simulink.
[33] POWERSIM Inc.: DSIM user’s guide[EB/PL]. USA: Powersim Inc., 2021[2021-08-29]. https://powersimtech. com/resources/dsim/dsim-users-manual/.
[34] Zhou Mike, Yan Jianfeng, Feng Donghao. Digital twin framework and its application to power grid online analysis[J]. CSEE Journal of Power and Energy Systems, 2019, 5(3): 391-398.
[35] Bélanger J, Lapointe V, Dufour C, et al. eMEGAsim: An open high-performance distributed real-time power grid simulator[C]//Architecture and Specification, 2007, DOI: http://dx.doi.org/.
[36] 孙鹏琨, 葛琼璇, 王晓新, 等. 基于硬件在环实时仿真平台的高速磁悬浮列车牵引控制策略[J]. 电工技术学报, 2020, 35(16): 3426-3435.
Sun Pengkun, Ge Qiongxuan, Wang Xiaoxin, et al. Traction control strategy of high-speed maglev train based on hardware-in-the-loop real-time simulation platform[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3426-3435.
[37] Milovanović S, Dujić D. Comprehensive comparison of modular multilevel converter internal energy balancing methods[J] IEEE Transactions on Power Electronics, 2021, 36(8): 8962-8977.
[38] Jin Xiao, Nian Heng. Overvoltage suppression strategy for sending AC grid with high penetration of wind power in the LCC-HVDC system under commutation failure[J]. IEEE Transactions on Power Electronics, 2021, 36(9): 10265-10277.
[39] Xiang Jinwen, Xu Jiazhu, Wang Hongliang, et al. Reconfigurable line-side converter for DC voltage matching and ripple suppression in multisystem locomotives[J]. IEEE Transactions on Power Elec- tronics, 2021, 36(5): 5832-5844.
[40] 沈卓轩, 姜齐荣. 电力系统电磁暂态仿真IGBT详细建模及应用[J]. 电力系统自动化, 2020, 44(2): 235-247.
Shen Zhuoxuan, Jiang Qirong. Detailed IGBT mode- ling and applications of electromagnetic transient simulation in power system[J]. Automation of Electric Power Systems, 2020, 44(2): 235-247.
[41] 王成山, 高菲, 李鹏, 等. 电力电子装置典型模型的适应性分析[J]. 电力系统自动化, 2012, 36(6): 63-68.
Wang Chengshan, Gao Fei, Li Peng, et al. Adaptabi- lity analysis of typical power electronic device models[J]. Automation of Electric Power Systems, 2012, 36(6): 63-68.
[42] 贺杨烊, 郑晓冬, 邰能灵, 等. 交直流混联电网LCC-HVDC换流器建模方法综述[J]. 中国电机工程学报, 2019, 39(11): 3119-3130.
He Yangyang, Zheng Xiaodong, Tai Nengling, et al. A review of modeling methods for LCC-HVDC converter in AC/DC hybrid power grid[J]. Pro- ceedings of the CSEE, 2019, 39(11): 3119-3130.
[43] Pejovic P, Maksimovic D. A method for fast time- domain simulation of networks with switches[J]. IEEE Transactions on Power Electronics, 1994, 9(4): 449-456.
[44] 徐晋, 汪可友, 李国杰, 等. 基于响应匹配的电力电子换流器恒导纳建模[J]. 中国电机工程学报, 2019, 39(13): 3879-3889.
Xu Jin, Wang Keyou, Li Guojie, et al. Fixed- admittance modeling of power electronic converters using response matching technique[J]. Proceedings of the CSEE, 2019, 39(13): 3879-3889.
[45] Mu Qing, Liang Jun, Zhou Xiaoxin, et al. Improved ADC model of voltage-source converters in DC grids[J]. IEEE Transactions on Power Electronics, 2014, 29(11): 5738-5748.
[46] Jin H. Behavior-mode simulation of power electronic circuits[J]. IEEE Transactions on Power Electronics, 1997, 12(3): 443-452.
[47] He Shaomin, Xu Zhiwei, Chen Min, et al. General derivation law with torque-free achieving of integral on-board charger on compact powertrains[J] IEEE Transactions on Industrial Electronics, 2021, 68(2): 1791-1802.
[48] 夏越, 陈颖, 宋炎侃, 等. 基于自适应移频分析法的Voltage-Behind-Reactance异步电机多时间尺度暂态建模与仿真[J]. 电网技术, 2018, 42(12): 3872- 3881.
Xia Yue, Chen Ying, Song Yankan, et al. Voltage- behind-reactance induction machine model for multi-timescale transient[J]. Power System Techno- logy, 2018, 42(12): 3872-3881.
[49] Huang Y, Chapariha M, Therrien F, et al. A constant-parameter voltage-behind-reactance synch- ronous machine model based on shifted-frequency analysis[J]. IEEE Transactions on Energy Conversion, 2015, 30(2): 1-11.
[50] Veltman A, Pulle D W J, De Doncker R. Fundamentals of electrical drives[M]. Netherlands: Springer, 2007.
[51] Yilmaz M, Krein P T. Capabilities of finite element analysis and magnetic equivalent circuits for elec- trical machine analysis and design[C]//Proceedings of IEEE Power Electronics Specialists Conference, Rhodes, Greece, 2008, DOI: 10.1109/PESC.2008.4592584.
[52] 胡畔, 陈红坤, 陈孟忻, 等. 基于动态相量法的改进多端模块化多电平换流器HVDC小干扰稳定模型[J]. 电工技术学报, 2017, 32(24): 193-204.
Hu Pan, Chen Hongkun, Chen Mengxin, et al. Advanced small-signal stability model for multi- terminal modular multilevel converter-HVDC systems based on dynamic phasors[J]. Transactions of China Electrotechnical Society, 2017, 32(24): 193-204.
[53] 姚蜀军, 屈秋梦, 蔡焱蒙, 等. 基于多频段动态相量法的MMC换流器建模方法[J]. 中国电机工程学报, 2020, 40(18): 5932-5942.
Yao Shujun, Qu Qiumeng, Cai Yanmeng, et al. Research of modeling method of modular multilevel converter based on multi-frequency bands dynamic phasor[J]. Proceedings of the CSEE, 2020, 40(18): 5932-5942.
[54] 宋钊, 舒德兀, 严正, 等. 采用时频坐标变换的大规模交直流系统多模态仿真方法[J]. 电力系统自动化, 2020, 44(5):130-137.
Song Zhao, Shu Dewu, Yan Zheng, et al. Multi- domain simulation method for large-scale AC/DC systems based on time-frequency coordination trans- form[J]. Automation of Electric Power Systems, 2020, 44(5): 130-137.
[55] Alimeling J H, Hammer W P. PLECS-piece-wise linear electrical circuit simulation for Simulink[C]// Proceedings of the IEEE 1999 International Con- ference on Power Electronics and Drive Systems, Hong Kong, China, 1999: 355-360.
[56] 王成山, 李鹏, 黄碧斌, 等. 一种计及多重开关的电力电子时域仿真插值算法[J]. 电工技术学报, 2010, 25(6): 83-88.
Wang Chengshan, Li Peng, Huang Bibin, et al. An interpolation algorithm for time-domain simulation of power electronics circuit considering multiple switching events[J]. Transactions of China Electro- technical Society, 2010, 25(6): 83-88.
[57] 舒德兀, 张春朋, 姜齐荣, 等. 电力电子仿真中开关时刻自校正插值算法[J]. 电网技术, 2016, 40(5): 1455-1461.
Shu Dewu, Zhang Chunpeng, Jiang Qirong, et al. A switching point self-correction interpolation algo- rithm for power electronic simulations[J]. Power System Technology, 2016, 40(5): 1455-1461.
[58] Migoni G, Kofman E, Bergero F, et al. Quantization based simulation of switched mode power supplies[J]. Simulation Transactions of the Society for Modeling & Simulation International, 2015, 91(4): 320-336.
[59] Zhao Zhengming, Tan Don, Shi Bochen, et al. A breakthrough in design verification of megawatt power electronic systems[J]. IEEE Power Electronics Magazine, 2020, 7(3): 36-43.
[60] Shi Bochen, Zhao Zhengming, Zhu Yicheng. Piecewise analytical transient model for power switching device commutation unit[J]. IEEE Transactions on Power Electronics, 2019, 34(6): 5720-5736.
[61] Cellier F E, Kofman E. Continuous System Simulation[M]. Boston, MA: Springer, 2006.
Review and Prospect of Software Digital Design for Electric Vehicle Power Control Unit
Abstract As the core component of electric vehicles (EV), the high safety and high performance requirements of power control unit (PCU) have led to the great challenges of high coverage and high efficiency for the PCU software design and verification. With the advantages of good flexibility, high efficiency and low cost, digital design is expected to be an effective way to follow the trend of power electronic design automation (PEDA). In this paper, the state-of-the-art developments in the digital design and verification of PCU software are thoroughly reviewed from the aspects of digital platform, mathematical modeling and numerical algorithm. Especially, the basic structures of digital platform are discussed and summarized, the modeling methods and numerical algorithms are detailedly introduced and evaluated from the criteria of fidelity, speed and complexity. Finally, the major challenges and future possible research topics of PEDA are prospected.
keywords:Electric vehicles, digital design, digital twins, power electronic design automation
DOI: 10.19595/j.cnki.1000-6753.tces.211028
中图分类号:TM46; TP337
宁波市“科技创新2025”重大专项资助项目(2020Z027)。
收稿日期 2021-07-12
改稿日期 2021-08-26
何绍民 男,1994年生,博士研究生, 研究方向为高效能电机系统数字化设计与验证、实时仿真建模与优化。E-mail:shirmin001@zju.edu.cn
杨 欢 男,1981年生,教授,博士生导师,研究方向为分布式发电与微电网、智能配用电、高效能电机系统等。E-mail:yanghuan@zju.edu.cn(通信作者)
(编辑 郭丽军)