 之间。
之间。摘要 针对接触网吊弦的接触面积小且易与电力线混淆,传统的故障识别算法存在如吊弦的误识别、识别效率低和不能实时检测等问题。相比传统卷积神经网络,胶囊网络(CapsNet)首次采用矢量作为输入,可以很好地保留目标的方向、角度等特征信息,更适合识别复杂背景下的吊弦。因此,该文提出一种基于改进胶囊网络和CV模型结合的吊弦故障识别算法,通过1×1归约层和3×3卷积核简化传统9×9胶囊网络的卷积层,并采用优化算法进行参数寻优,缩短训练权重时间;同时输出量保留了方向与角度,能更准确地对烧伤、载流环折断、脱落等故障的吊弦进行分类;通过对吊弦巡检图像应用该文方法,吊弦定位准确率提高到95%。与前馈神经网络(BPNN)和Alex Krizhevsky设计的AlexNet等方法进行对比,所提出的吊弦故障识别方法可以准确、迅速地从复杂背景识别出吊弦,并准确地找到吊弦故障的位置,大大提高了输电线路智能巡检的效率。
关键词:接触网吊弦 故障识别 改进胶囊网络
中国的电气化铁路系统主要使用接触网连接,易受环境因素的影响[1-2],如果发生故障,将给铁路运输系统造成重大的经济损失[3]。此外,大多数铁路接触网都位于偏远地区或复杂地形中,因此,人工巡检难以检测悬挂在不同位置接触网的状态,甚至更加难以准确地定位故障的吊弦。
目前,人工巡检定位吊弦故障操作过于复杂、效率较低。在此过程中,首先使用巡逻车检查接触网的各个部分的吊弦,吊弦的作用是将其悬吊在轴承电缆上,以确保接触网的高度。吊弦的主要故障包括载流环断裂、无应力导致的螺栓松动和吊弦脱落。检测过程也存在如检查周期长、效率低和漏检等问题[4]。为了解决这些问题,采用图像处理技术和研发无人机智能巡检技术显得尤为重要[5]。
为了准确地识别接触网吊弦的故障部分,首先必须将吊弦从背景图像中完全分离出来。除了损坏的吊弦本身和接触网电力线之外,获取的图像还包括很大一部分背景和其他电力设备[6]。此外,由于吊弦的位置信息难以获取,需要通过寻找合适的定位算法提取相应的位置信息。
吊弦的接线方式分为压接式整体吊弦和螺栓可调式整体吊弦。压接式一般用于工厂或者加工车间使用;而螺栓可调式则广泛应用于铁路接触网上,因为这种吊弦适用于吊弦程度长度变化无规律的地方,可以随着接触网的上下浮动进行相应的调整,本文主要针对螺栓可调式整体吊弦进行故障识别与定位。吊弦的故障类型分为烧伤、载流环折断、脱落等。近年来,许多研究学者对接触网进行了大量研究,推动了铁路接触网智能巡检的发展。2000年,文献[7]引入了一种新型自上而下的方法来自动提取接触网吊弦,该方法使用先验知识从真实的数据库中提取并分离了吊弦。同年,戚广枫等对接触网吊弦的动应力值和疲劳载荷特性进行了详细分 析[8]。2001年,美国公司ENSCO研发轨道视频检测系统(Visual Identity System, VIS)实现对Panda Pal扣件工作状态实时检测[9]。4年后,德国铁路工程公司GBM Wiebe开发了GeoRail-Xpress综合检测车,该检测车可以对整个铁路电气设备系统进行实时检测[10]。
2006年,G. E. Hinton等在《自然》杂志上首次提出了深度学习的概念。自此深度学习成为机器视觉的重要检测工具[11]。2014年,范华等提出了一种针对低压电网的识别定位技术[12]。2016年,卢用煌等使用深度学习正确识别ID号并进行分类[13]。王毅星提出了一种基于多树融合的深度学习迁移模型,用于图像识别和分类[14]。2017年,G. E. Hinton等提出胶囊网络(Capsule Network, CapsNet),将有可能替代传统的卷积神经网络(Convolutional NeuralNetwork, CNN),为深度学习领域带来了新的契机[15]。文献[16]应用胶囊网络对手写数字进行分类,由于数字本身的特征单一,识别率较高,而吊弦会受到所处现场复杂环境的影响,因此需要对更多的吊弦特征进行分析。
本文提出一种基于改进胶囊网络的接触网吊弦故障识别与定位算法。针对吊弦特征应考虑光强度、位置、变形、角度、纹理和位置信息,因此选择这六个特征作为输入向量,然后采用1×1归约层结合3×3的卷积层简化传统胶囊9×9胶囊神经元,接着通过改进胶囊网络对采集到的大量完好的和各种吊弦故障(包含载流环折断和脱落)进行训练和学习,完成吊弦不同故障情况的识别,最后通过边缘检 测、直线检测和改进区域水平集(Chan-Vese, CV)模型精确定位绝缘子破损的位置。
2011年,Lin Lin等利用胶囊神经元(capsule)对MAC协议进行识别[17]。与传统的标量神经元不同,胶囊网络则是由多个神经元组成的向量,而且通过其向量长度表示上层网络传递的目标存在的可能性,并且其方向则表示实体的实际状态,即“实例化参数”,胶囊神经元模型如图1所示[18]。
动态路由算法(squash)是解决将低层胶囊i的输出值传送给哪个高层胶囊的问题,实质上数据传输途径由低层胶囊输出向量与高层胶囊输入向量的相似程度决定的。其中,动态路由算法(Spuash)为激活函数,通过对输入向量进行尺度缩放,将模长压缩到之间。
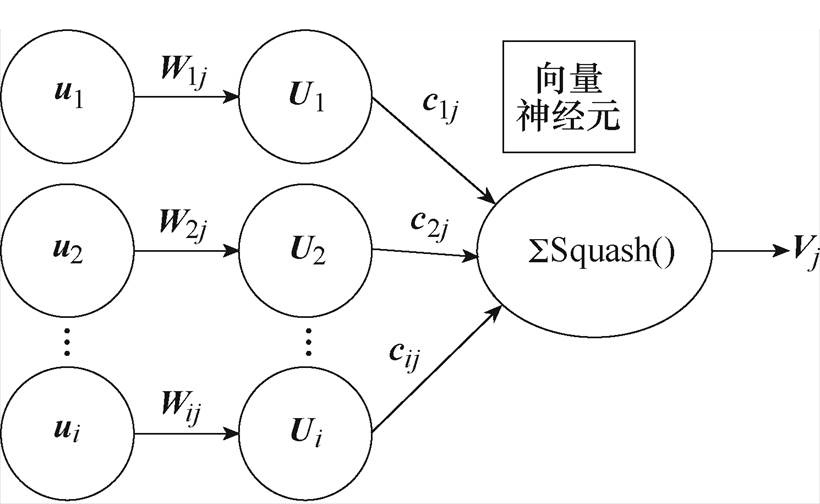
图1 胶囊神经元模型
Fig.1 Capsule neuron model
图1中, 为动态路由耦合系数矩阵,更新公式为
为动态路由耦合系数矩阵,更新公式为
 (1)
(1)式中,k为初始化相似度权值矩阵 的个数。
的个数。
胶囊输出 由低层胶囊输入
由低层胶囊输入 和得到,即
和得到,即
 (2)
(2)式中, ,
, 为胶囊网络的权值矩阵。
为胶囊网络的权值矩阵。
设输出 表示概率,则输出值应控制在[0, 1
表示概率,则输出值应控制在[0, 1 之间,通过非线性压缩可得
之间,通过非线性压缩可得
 (3)
(3)改进胶囊网络的原理是先输入图像到卷积层(ReLu),并通过卷积运算得到一个基础胶囊层,再通过动态路由算法(Squash)式(3)将基础胶囊层的数据传输到图像胶囊层,然后将图像胶囊层数据传输到特征胶囊层,最后使用全连接层将特征胶囊层的数据进行重组和建模,改进胶囊网络结构如图2所示。
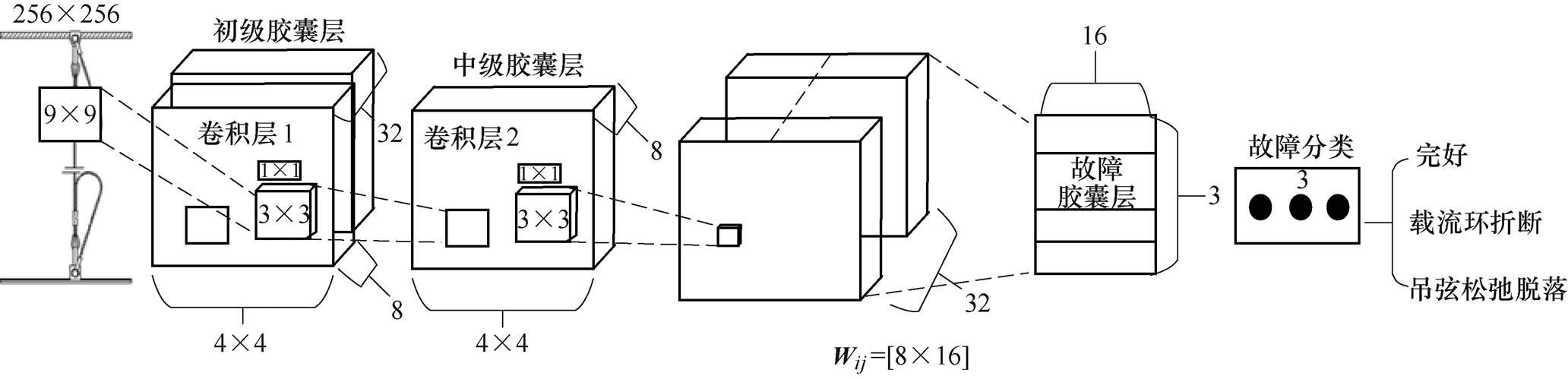
图2 改进胶囊网络结构
Fig.2 The structure of improved CapsNet
卷积核尺寸的设置需要满足:
(1)为避免以中心像素点为标准进行滑动时的位置信息发生偏移,应使锚点刚好在中间。
(2)为保证输入图像大小与输入相同,需要在图像中间添加一个零层,因此卷积核尺寸需要设置成奇数[19]。
卷积核尺寸[20]为
 (4)
(4)式中,G为输入像素。
如果卷积核的尺寸得出是偶数,则需要加1。吊弦输入像素为256×256,因此胶囊网络的卷积核尺寸最大为 。
。
在达到相同感受野的情况下,卷积核尺寸越小,所需要的参数和计算量越小,但卷积核的尺寸必须大于1才有提升感受野的作用;而卷积核若超过9×9,将会导致输出图像增大,训练时间增加,同时识别的准确率降低。因此本文应用5 500副吊弦图像对3×3,5×5,7×7和9×9卷积核模型进行训练,并对其输出张量、可训练参数、训练时间及损失值进行对比。例如,当卷积核尺寸为3×3时,输出张量为 ,输出维度为8,因此可训练参数为
,输出维度为8,因此可训练参数为 个。不同尺寸卷积核参数对比见表1。
个。不同尺寸卷积核参数对比见表1。
表1 不同尺寸卷积核参数对比
Tab.1 Comparison of convolution kernels of different sizes
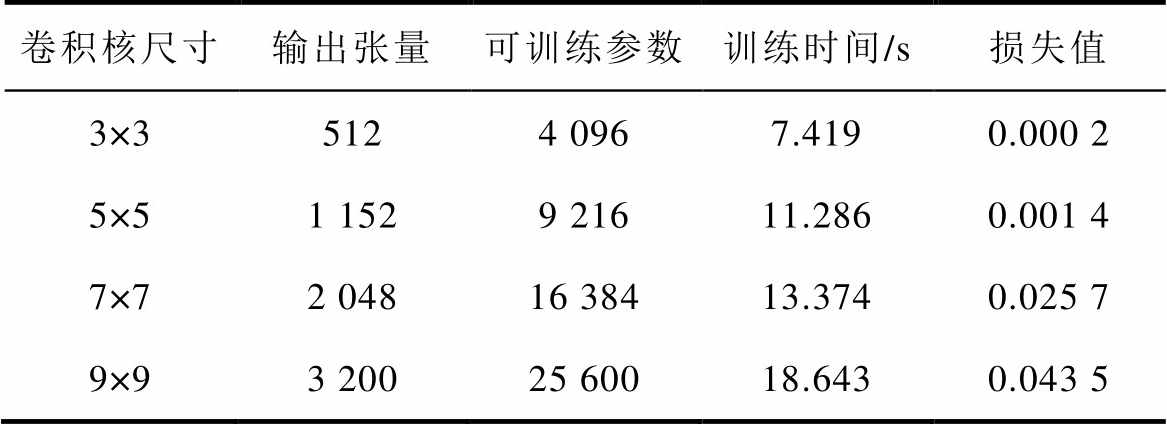
卷积核尺寸输出张量可训练参数训练时间/s损失值 3×35124 0967.4190.000 2 5×51 1529 21611.2860.001 4 7×72 04816 38413.3740.025 7 9×93 20025 60018.6430.043 5
由表1可得卷积核尺寸为3×3时,在降低胶囊网络的训练时间的前提下,可以有效地降低模型损失值,从而提高了改进胶囊网络的性能。
增加1×1的归约层,可以对卷积核通道实现降维,同时提高了模型的非线性。因此本文提出的改进胶囊网络通过采用1×1归约层与3×3的卷积核简化传统9×9胶囊神经元,使得初级胶囊层简化为4×4×32个胶囊;同时改进胶囊网络增加一层中级胶囊层(intermediate caps),并采取随机梯度法和遗传算法进行参数的寻优,以减少权重的训练时间。然后将图像数据输入故障胶囊层,并通过式(2)计算得到。故障分类层由3个向量组成,分别设为吊弦完好、吊弦载流环折断和吊弦脱落。对其中吊弦的3个向量求模,模值最大的那个向量即为吊弦故障情况的概率最大的分类。
本文利用BPNN、AlexNet和传统胶囊网络对改进后的CapsNet进行性能测试对比,并对图像数据集进行分类,各模型性能对比见表2。分别测试各个模型对于同一数据集的Top-1%和Top-5%的分类准确率,其中,GPU型号选择Titan X,CPU型号选择Intel i5-8700(4GHz)。
表2 各模型性能对比
Tab.2 Performance comparison of each model

模型Top-1%Top-5%GPU/msCPU/s BPNN43788.65.0 AlexNet57902.50.3 胶囊网络70911.80.66 改进胶囊网络7293.51.30.18
由表2所示,改进胶囊网络相比于BPNN、AlexNet和胶囊网络,在Top-1%和Top-5%的分类准确率更高,同时GPU和CPU的识别时间更少,说明改进胶囊网络的性能更优。
铁路维护大多数是在夜间进行,而接触网相对其他电力设备较细且不易识别。因此,有必要对图像进行预处理和增强,以使吊弦与复杂背景分离。
预处理步骤包括灰度处理、二值化、高斯滤波和边缘提取,吊弦图像预处理流程如图3所示。
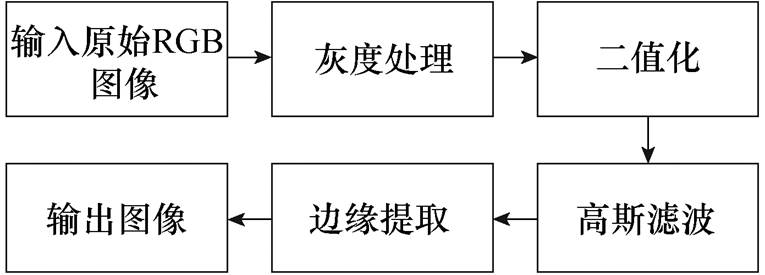
图3 吊弦图像预处理流程
Fig.3 Flow chart of suspension image preprocessing
(1)将采集到的不同角度、大小和故障类型的吊弦彩色图像进行灰度处理,结果如图4a所示。
(2)将灰度处理过的图像进行二值化,即把像素点设置为0或255,吊弦灰度值为255,其他背景为0,这样可以去除复杂背景带来的影响,如图4b所示。
(3)噪声会降低图像的质量,而采集到的接触网吊弦图像,因其在铁路上方,包含很多的高斯噪声。所以本文采用高斯滤波对图像进行处理,如图4c所示。
(4)通过与Robert算子、Sobel算子、LOG算子等方法对吊弦识别效果进行对比,可得Canny算法检测到的吊弦边缘更加完整,因此本文采用Canny算法对吊弦边缘进行提取,如图4d所示。
最后的输出图像用于霍夫(Hough)变换提取吊弦直线。
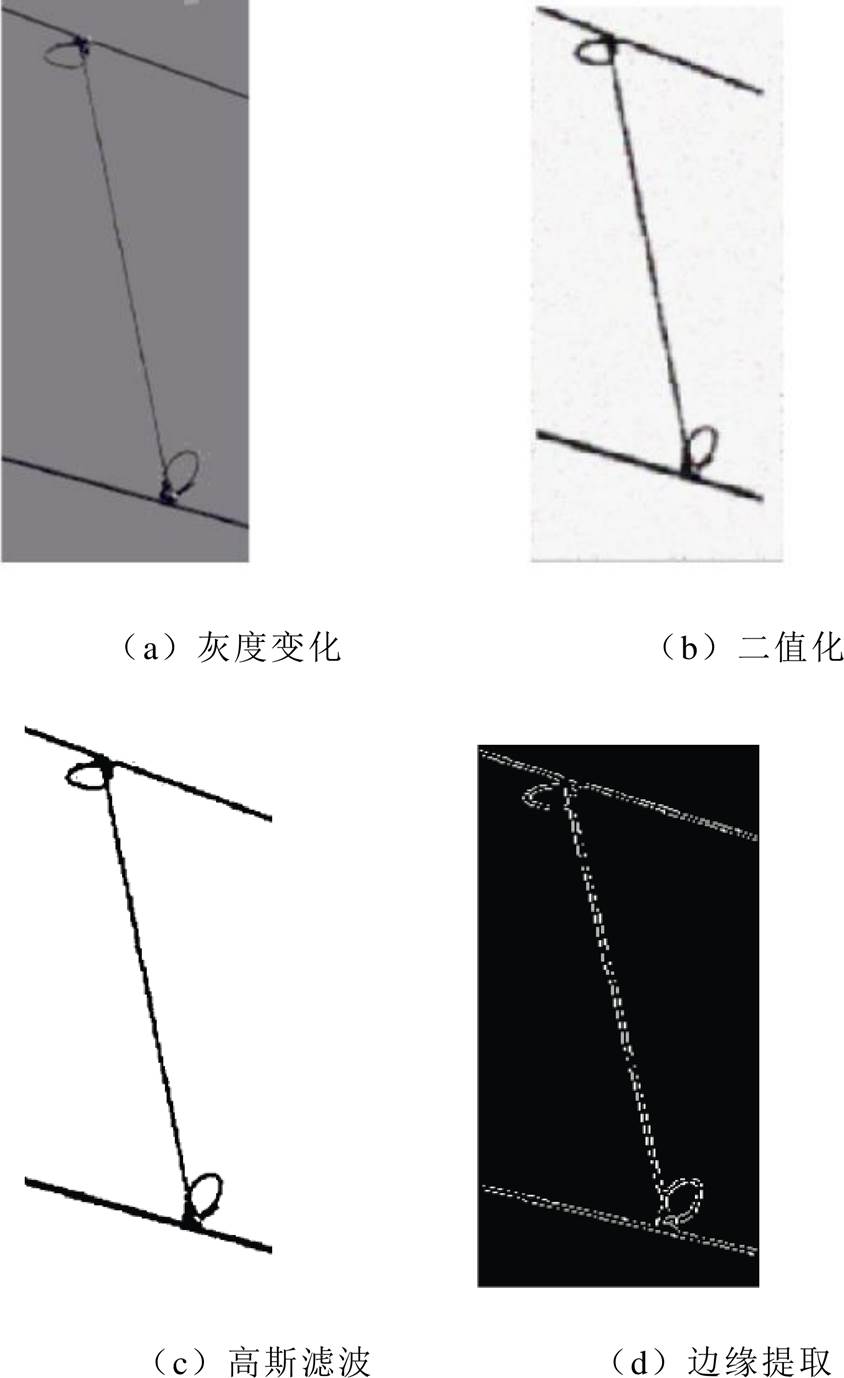
图4 吊弦处理结果
Fig.4 Processing results of suspension
霍夫变换(Hough Transform, HT)[21]主要用于找出所有符合规定角度内的直线,因为吊弦都是线性结构,所以检测经过边缘提取的吊弦直线即可。当在图像域检测直线时,所有经过点 的直线定义为
的直线定义为
 (5)
(5)式中, 为坐标原点到直线的距离;
为坐标原点到直线的距离; 为该直线的法线与
为该直线的法线与 轴的夹角;每一组
轴的夹角;每一组 为经过的直线。
为经过的直线。
检测直线过程范围为0°~180°,再计算相应的值,得到共线点的个数,假设直线在第一象限,位置检测如图5所示。
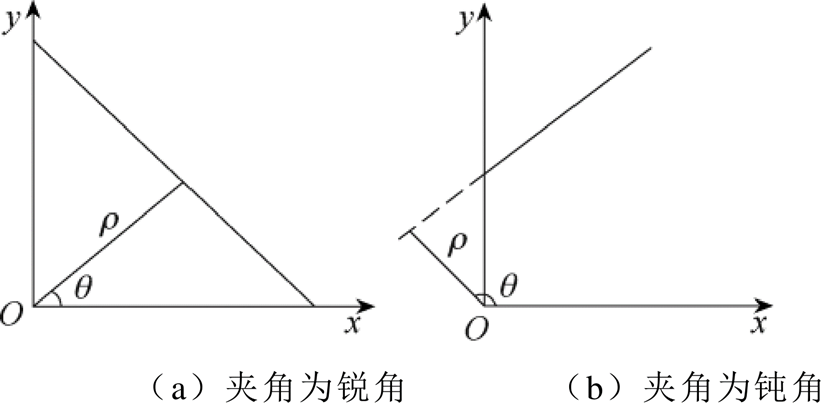
图5 位置检测
Fig.5 Detection of position
由直线极坐标方程可得: ,其中,
,其中, ,当且仅当和
,当且仅当和 都达到最大且
都达到最大且 时(根据
时(根据 来调整的值),的取值范围为
来调整的值),的取值范围为 。
。
HT直线检测如图6所示。根据调整Hough角度,控制直线检测找到吊弦边缘直线,对于吊弦缺失部分则检测不到直线。
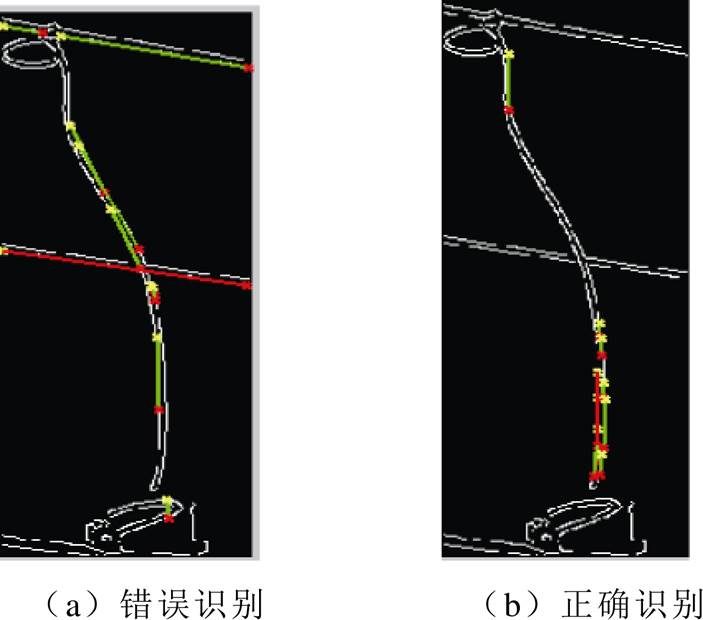
图6 HT直线检测
Fig.6 Hough transform line detection
采用CV模型将吊弦的承力索和线进行分割,CV模型能量泛函数[22]为
e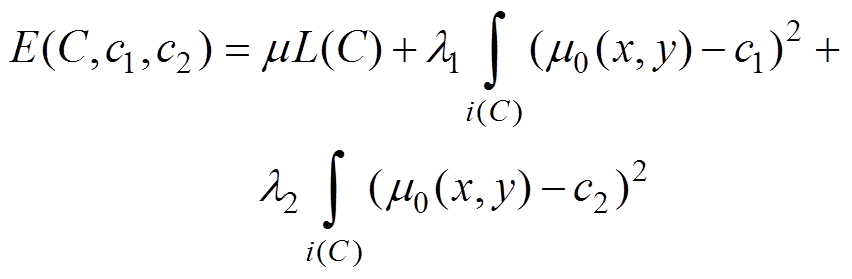 (6)
(6)
 (7)
(7) (8)
(8)
式中, 为CV模型常数;
为CV模型常数; 为曲线C的弧长;
为曲线C的弧长; 为长度项,可以平滑演化曲线;
为长度项,可以平滑演化曲线; 、
、 为权重系数,均大于0;
为权重系数,均大于0; 为图像像素灰度值;
为图像像素灰度值; 为图像演化曲线外部像素灰度均值;
为图像演化曲线外部像素灰度均值; 为图像演化曲线内部像素灰度均值;
为图像演化曲线内部像素灰度均值; 为正则化阶跃函数。
为正则化阶跃函数。
考虑到吊弦边缘为形状规则的承力索,加入水平集方法,可以较好地修正轮廓线拓扑变化,其水平集演化欧拉-拉格朗日方程为
 (9)
(9)
式中, 为全局函数,作为CV模型脉冲函数;
为全局函数,作为CV模型脉冲函数; 为散度算子;
为散度算子; 为演化曲线曲率。
为演化曲线曲率。
吊弦精确定位结果如图7所示,本文选取有明显折断的吊弦作为分割对象。通过CV模型设定矩型作为初始轮廓线,为了精确定位破损的位置,需通过Hough修正得到图像,用来精确定位破损位置。
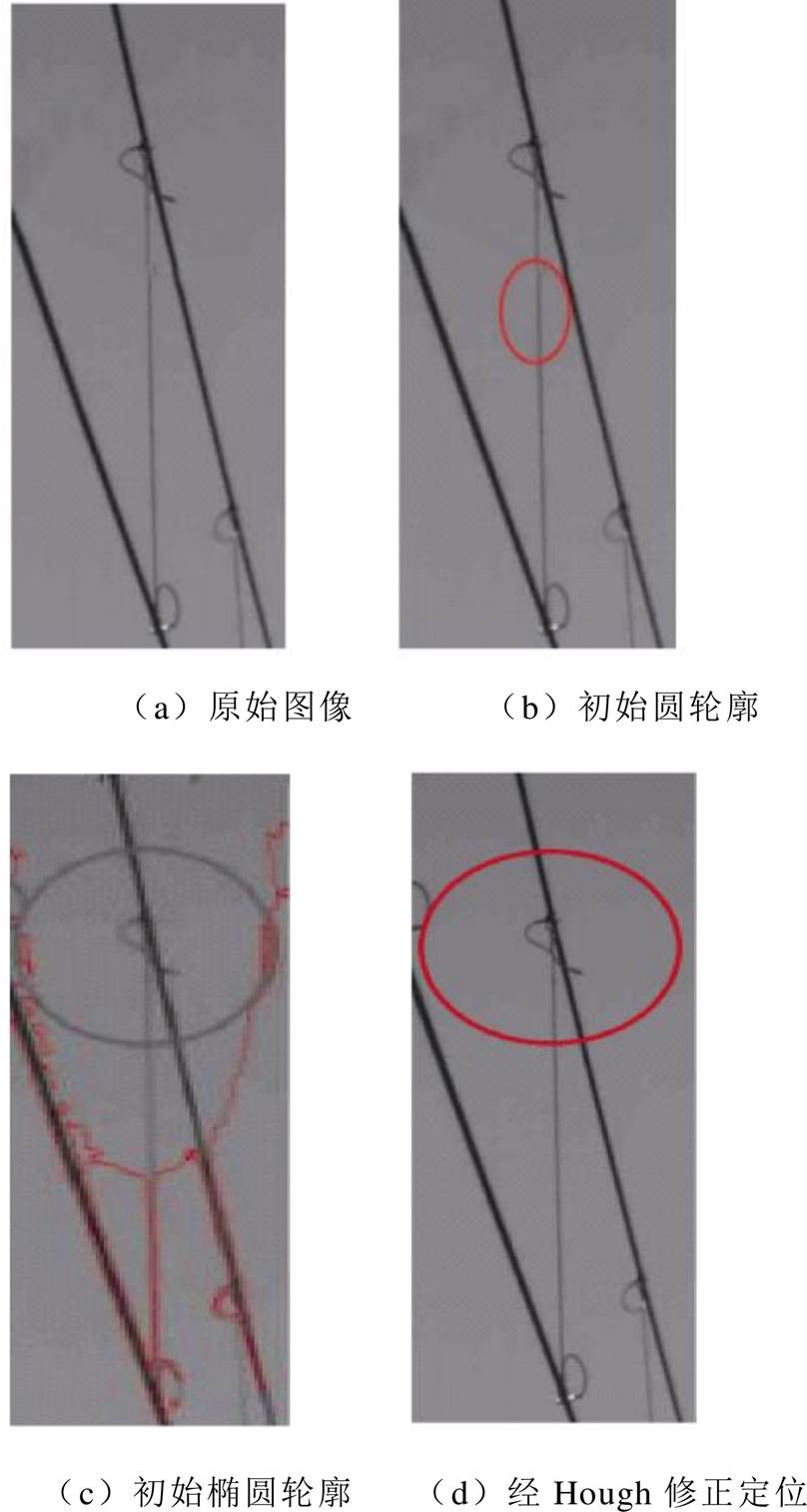
图7 吊弦精确定位结果
Fig.7 Accurate positioning results of suspension
通过对比可知,针对接触网吊弦上明显的折断部位,采用CV模型矩形初始轮廓经过Hough变化修正后,相对于圆形初始轮廓,椭圆型轮廓可以更好地定位吊弦折断的部位,因此本文采用经过Hough变化修正的CV模型进行吊弦故障的定位。
本文提出的基于改进胶囊网络的吊弦故障识别与定位模型具体流程如图8所示。
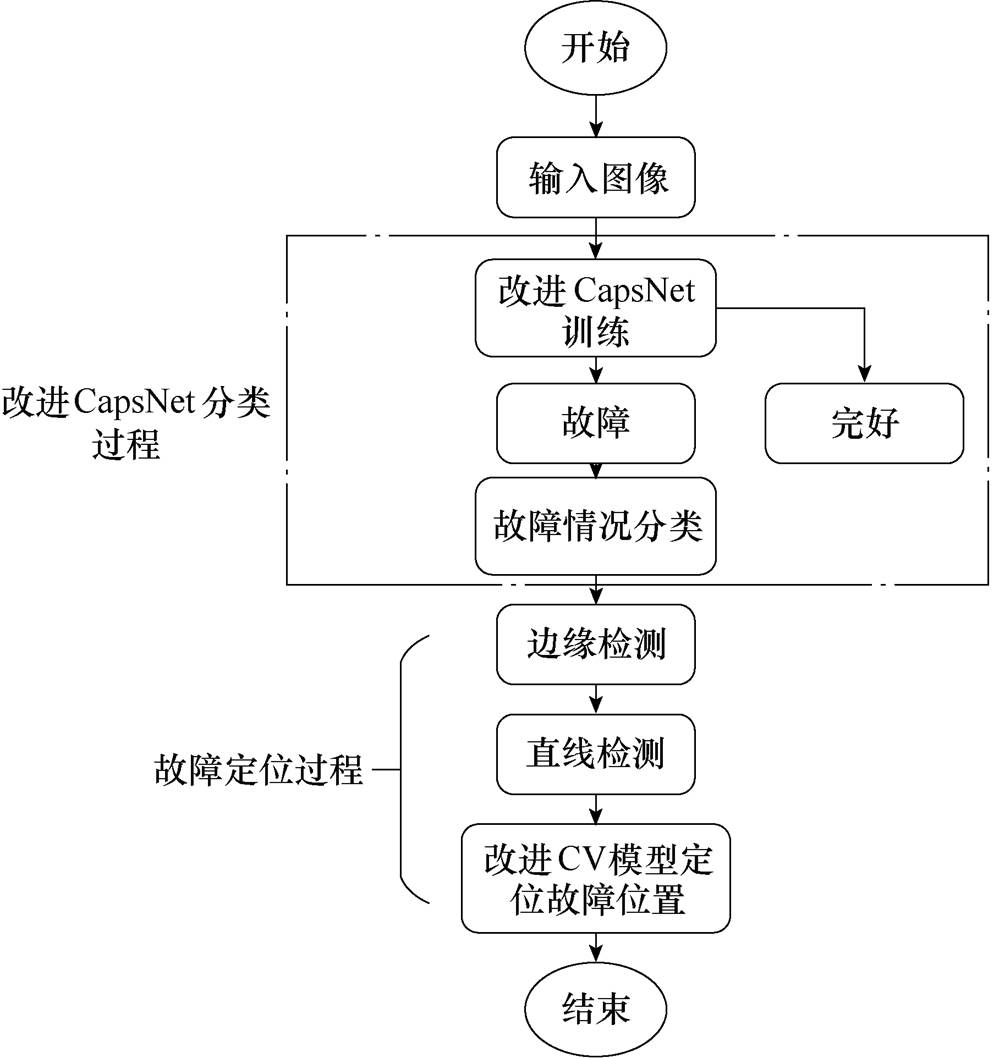
图8 吊弦故障识别与定位流程
Fig.8 Flow chart of fault identification and positioning of suspension
该算法的具体步骤如下:
(1)将采集到的不同故障类型的吊弦信息包括像素值、坐标和角度等作为不同的输入矢量输入到改进胶囊网络中。
(2)通过1×1归约层和3×3卷积层进行卷积操作获得初级胶囊层,再选取遗传算法进行参数寻优,找到最优权重。
(3)通过动态路由算法迭代式(1)进行更新,得到高层胶囊层。
(4)由式(3)可得向量输出模的最大概率,得出吊弦故障的分类。
(5)将识别出来的吊弦故障图像通过边缘提取和直线检测得到规则的边缘直线。
(6)通过改进CV模型对破损区域进行精确定位,完成对吊弦故障部位的检测。
本文所提出的方法通过Matlab R2014b和TensorFlow软件实现。从北京铁路局京广线从漕河站到保南站之间拍摄的包括接触网、铁路和山脉等复杂背景总计5 500张吊弦图像作为胶囊网络的训练集,并随机选取训练集中的20%作为测试集,用来验证识别的准确率。各种吊弦图像识别效果如图9所示。
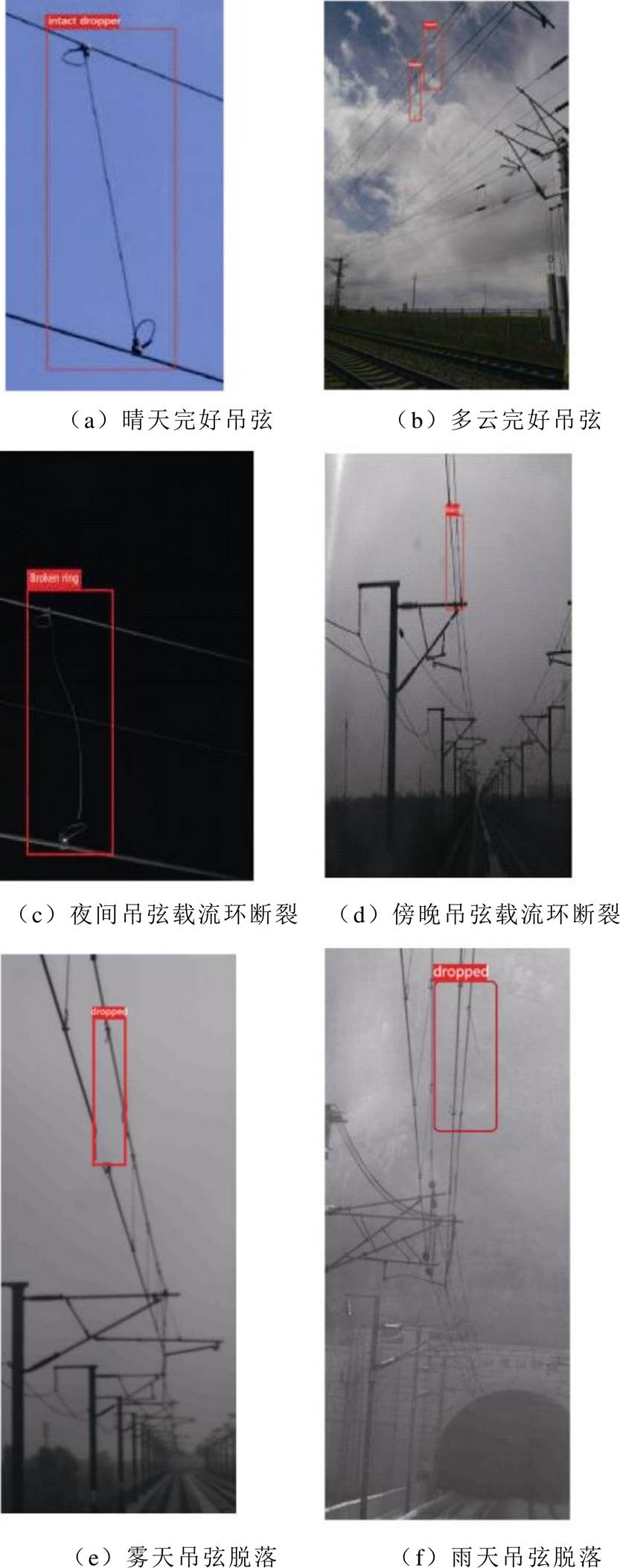
图9 识别效果
Fig.9 Identification effect
由图9可知,改进胶囊网络可以准确地识别出不同故障类型、不同位置的吊弦,具有良好的鲁棒性。
为了验证改进胶囊网络的实用性和识别准确性,使用了不同大小和角度的吊弦故障图像进行训练。将改进胶囊网络模型与传统的反向传播神经网络(Back Propagation Neural Network, BPNN)和基于AlexNet的深度学习模型的性能进行了对比。通过改变学习率和步长并比较其性能来选择参数的最佳值,得出0.5的学习率,并且总步数等于3 000为最优参数。训练结果由损失值表征,BPNN和AlexNet损失值如图10所示,改进胶囊网络损失值如图11所示。
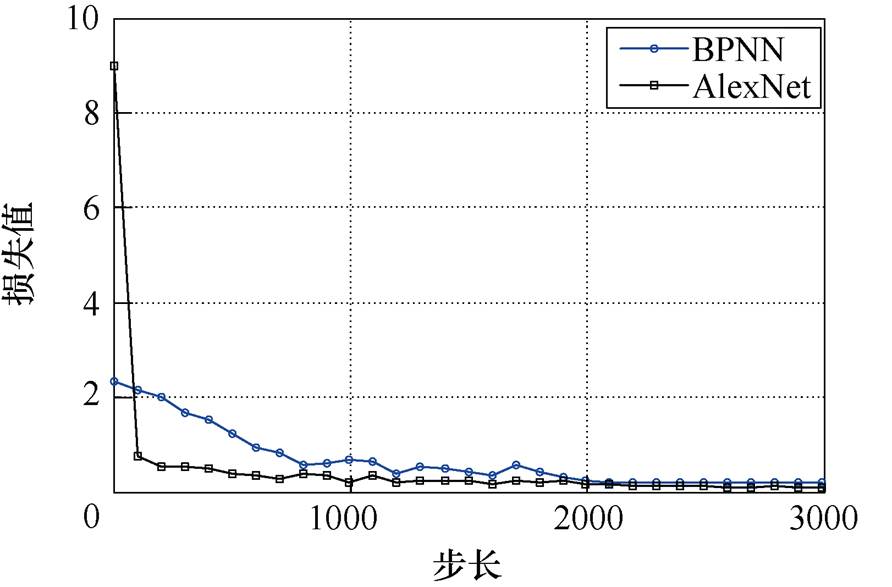
图10 BPNN和AlexNet损失值
Fig.10 Loss values of BPNN and AlexNet
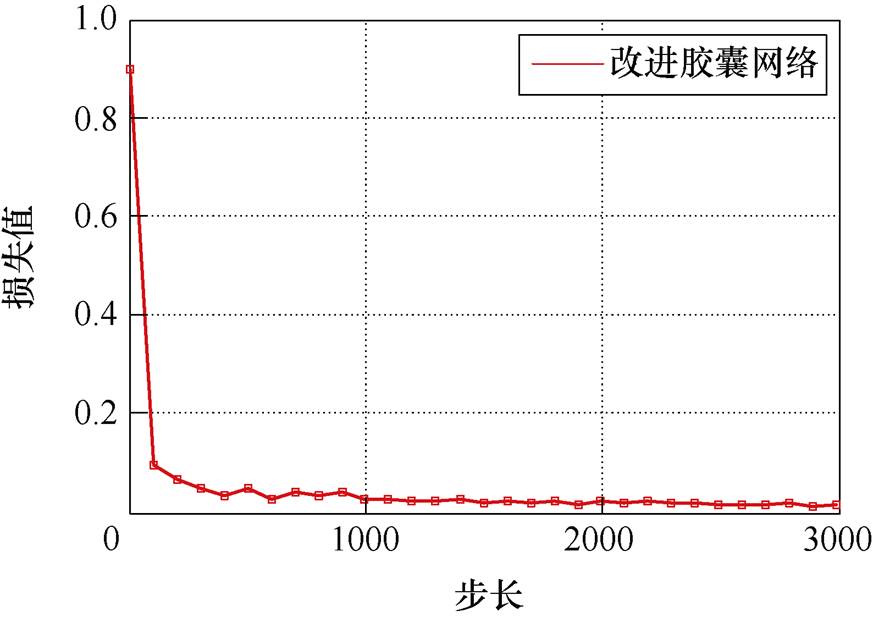
图11 改进胶囊网络损失值
Fig.11 Loss values of improved CapsNet
图10中,训练损失初始值为9,当步长达到3 000时,损失值减小到0.02左右。
根据图11与图10对比可得:
(1)损失值在三个网络训练中都呈整体下降趋势,前半段下降都很快,但是改进胶囊网络相较于BPNN和AlexNet网络,起始的损失值仅为0.9,比BPNN的2.5和AlexNet的9更低。
(2)步长达到3 000后,改进的CapsNet的最终损失函数值等于0.000 2,比AlexNet的损失值小十倍左右,这是由于改进胶囊网络采用更加简单的卷积层和规约层,而且通过遗传算法的参数寻优,使模型具有良好的鲁棒性。
(3)由于BPNN中不存在角特征点,一旦损失值达到0.5,模型训练就变得不稳定,而改进胶囊网络则保留了不同特征信息,训练更加稳定,这突显了改进胶囊网络的优越性能。
为了验证改进胶囊网络的学习性能,使用数据库随机选取得图像数据,并与其他几种不同算法做对比,不同网络识别率对比如图12所示。
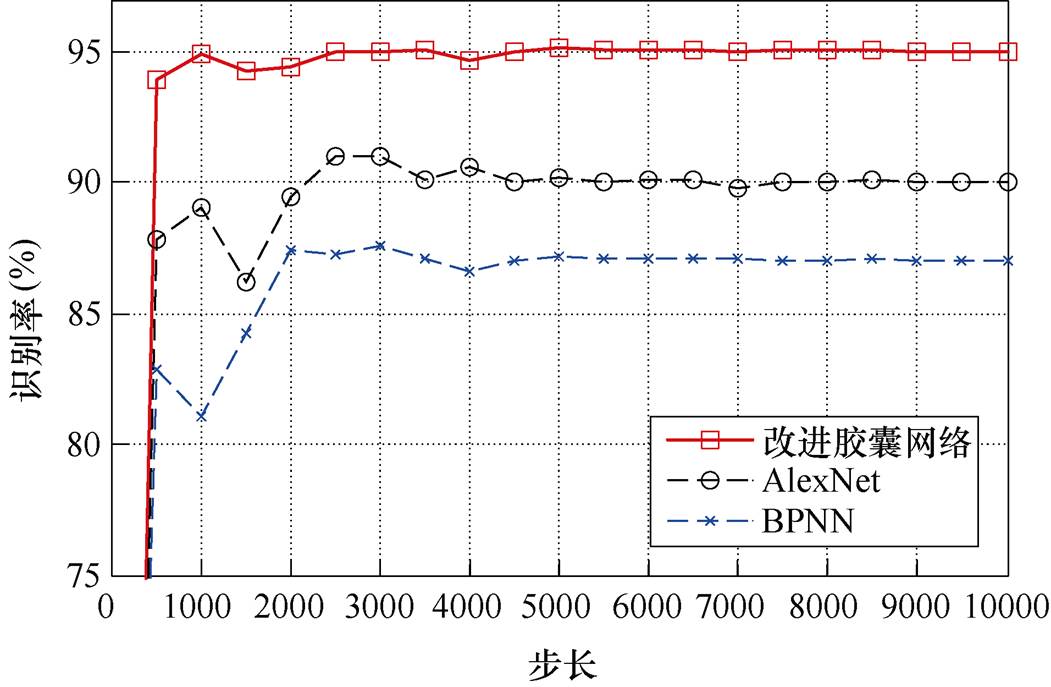
图12 不同网络识别率对比
Fig.12 Contrasts of identification rates of different network
由图12可得,改进胶囊网络的识别率高于BPNN和AlexNet。通过持续学习,识别的准确性从92%提高到95%。这是由多个向量胶囊一起学习的结果,并保留了不同的特征向量(如幅度和角度),因此降低了错误分类的可能性。
表3显示了不同算法识别时间的对比。可知,与BPNN和AlexNet相比,改进胶囊网络具有更短的分类时间,更适合检测不同复杂背景下吊弦故障 图像。
表3 不同算法识别时间
Tab.3 Identification time of different algorithm (单位: s)
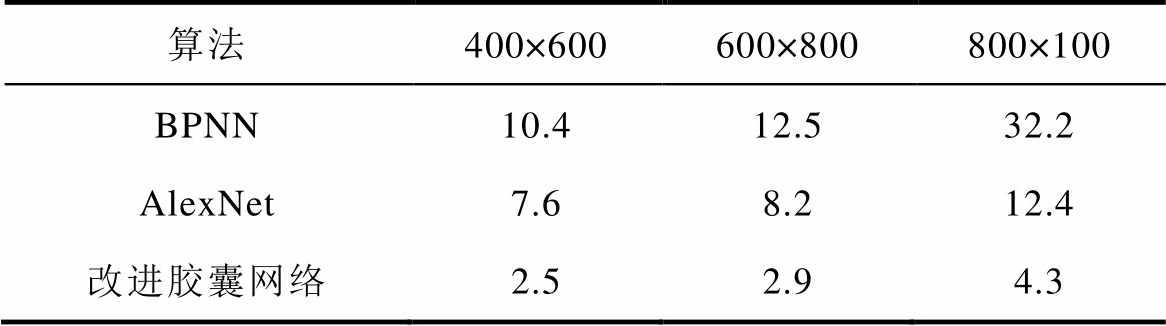
算法400×600600×800800×100 BPNN10.412.532.2 AlexNet7.68.212.4 改进胶囊网络2.52.94.3
应用改进CV模型对改进胶囊网络中识别出来的故障吊弦图像进行定位。由图8中的步骤(4)~步骤(6)可知,绝缘子破损位置精确定位包括边缘提取、直线检测和CV模型定位,其定位结果如图13所示。
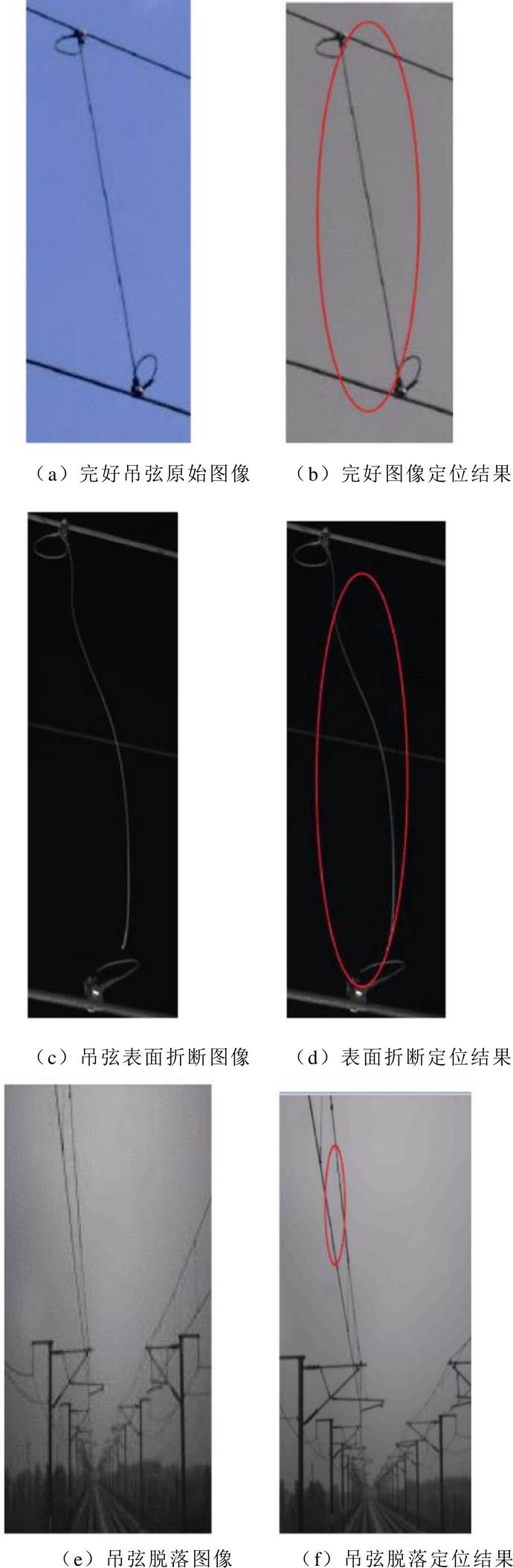
图13 CV模型定位结果
Fig.13 CV model regional location
图13中,通过本文所提出的改进CV模型,利用Hough修正后能够精确地定位到不同背景下完好吊弦的故障位置。
从改进胶囊网络识别出不同情况的吊弦中随机选取1组20张图片进行吊弦精确定位,分别与红外成像法、局部特征分析法[23]进行了对比,定位准确率对比见表4。
表4 不同算法定位准确率对比
Tab.4 Comparison of different algorithm positioning accuracy
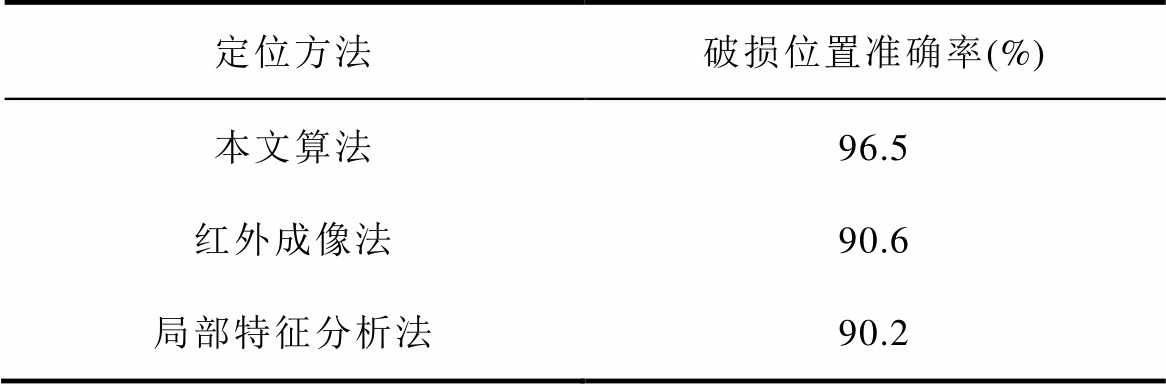
定位方法破损位置准确率(%) 本文算法96.5 红外成像法90.6 局部特征分析法90.2
由表4可知,本文提出的改进胶囊网络和CV模型结合的吊弦故障识别模型,因其更适合小样本学习,训练效果更优,相比于其他方法定位准确率更高,对于不同复杂背景和不同故障类型的吊弦都具有较好的定位。
随着输电线路检测技术的不断普及,智能化水平的不断提高,针对接触网吊弦这一关键设备,实时检测吊弦是否故障和故障类型尤为重要。本文提出了一种基于改进胶囊网络和CV模型的接触网吊弦故障检测模型,可以对复杂背景中的故障吊弦进行识别并对故障位置进行精确定位,通过对故障吊弦进行仿真和实验验证可得以下结论:
1)改进胶囊网络有着较强的自学习能力和自适应能力,而且对于小样本集有着很好的训练效果,可以有效地检测出故障的吊弦,并抑制由复杂背景引起的干扰,识别率达到了95%。由于改进胶囊网络的输入量为矢量,最大限度保留了吊弦的特征信息,并且通过输出矢量计算出概率,可以更准确地对不同程度的破损情况进行分类,从而提高了识 别率。
2)通过改进胶囊网络识别并分类的故障吊弦图像应用改进CV模型进行区域分割,可以精确吊弦的故障位置,其准确率达到了96.5%,相较于其他方法,更适合接触网吊弦故障精确定位。
本文提出的方法可以较好地实现复杂背景下的吊弦故障识别,并且可以精确定位故障部位,满足智能巡检的要求。但改进胶囊网络对于大量图像的训练时间相对较长,所以减少胶囊网络的训练时间是未来研究的重点。
参考文献
[1] 刘满君, 程林, 黄道姗, 等. 基于运行可靠性理论的高可靠性供电路径搜索方法[J]. 电工技术学报, 2019, 34(14): 3004-3011.
Liu Manjun, Cheng Lin, Huang Daoshan, et al. A high reliability power supply path search method based on operation reliability theory[J]. Transactions of China Electrotechnical Society, 2019, 34(14): 3004-3011.
[2] 张血琴, 陈奎, 李瑞芳, 等. 高架桥段地铁接触网的改进防雷措施[J]. 高电压技术, 2016, 42(5): 1527- 1534.
Zhang Xueqin, Chen Kui, Li Ruifang, et al. Improved lightning protection measures for metro contact network of viaduct section[J]. High Voltage Engin- eering, 2016, 42(5): 1527-1534.
[3] 李恩文, 王力农, 宋斌, 等. 基于改进模糊聚类算法的变压器油色谱分析[J]. 电工技术学报, 2018, 33(19): 4594-4602.
Li Enwen, Wang Linong, Song Bin, et al. Chromato- graphic analysis of transformer oil based on improved fuzzy clustering algorithm[J]. Transactions of China Electrotechnical Society, 2018, 33(19): 4594-4602.
[4] 程学珍, 朱晓林, 杜彦镔, 等. 基于神经模糊Petri网的高压断路器故障诊断研究[J]. 电工技术学报, 2018, 33(11): 2535-2544.
Cheng Xuezhen, Zhu Xiaolin, Du Yanbin, et al. A fault diagnosis of high voltage circuit breakers based on neural fuzzy Petri nets[J]. Transactions of China Electrotechnical Society, 2018, 33(11): 2535-2544.
[5] 姚海燕, 张静, 留毅, 等. 基于多尺度小波判据和时频特征关联的电缆早期故障检测和识别方法[J]. 电力系统保护与控制, 2015, 43(9): 115-123.
Yao Haiyan, Zhang Jing, Liu Yi, et al. A method for early detection and identification of cables based on multi-scale wavelet criterion and time-frequency feature correlation[J]. Power System Protection and Control, 2015, 43(9): 115-123.
[6] Karimi A S, Kuo C C J. A robust technique for latent fingerprint image segmentation and enhancement[C]// IEEE International Conference on Image Processing, San Diego, California, 2008: 193-200.
[7] 张子健. 面向高铁接触网缺陷检测的智能图像处理关键技术研究[D]. 杭州: 浙江大学, 2019.
[8] 戚广枫, 赵慧, 肖晓晖, 等. 高速铁路接触网吊弦动应力数值模拟及其疲劳荷载特征分析[J]. 中国机械工程, 2018, 29(9): 1063-1068.
Qi Guangfeng, Zhao Hui, Xiao Xiaohui, et al. Numerical simulation of dynamic stress and its fatigue load characteristics of catenary strings in high speed railway contact network[J]. China Mechanical Engineering, 2018, 29(9): 1063-1068.
[9] Liu Wenqiang, Liu Zhigang, Alfredo N, et al. Multi- objective performance evaluation of the detection of catenary support components using DCNNs[J]. IFAC Papers on Line, 2018, 51(9): 21-27.
[10] Huang Shize, Zhai Yachan, Zhang Miaomiao, et al. Arc detection and recognition in pantograph-catenary system based on convolutional neural network[J]. Information Sciences, 2019, 501(3): 1024-1029.
[11] Hinton G E, Osindero S, Teh Y W. A fast learning algorithm for deep belief nets[J]. Neural Computation, 2006, 18(7): 1527-1554.
[12] 范华, 任俊, 曹卫国. 一种面向低压配电网的非侵入故障定位识别方法[J]. 电气技术, 2014, 15(11): 66-69.
Fan Hua, Ren Jun, Cao Weiguo. A non-intrusive fault location and identification method for low voltage distribution network[J]. Electric Technology, 2014, 15(11): 66-69.
[13] 卢用煌, 黄山. 深度学习在身份证号码识别中的应用[J]. 应用科技, 2019, 46(1): 123-128.
Lu Yonghuang, Huang Shan. Application of deep learning in identification of ID card number[J]. Applied Technology, 2019, 46(1): 123-128.
[14] 王毅星. 基于深度学习和迁移学习的电力数据挖掘技术研究[D]. 杭州: 浙江大学, 2019.
[15] Sabour S, Frosst N, Hinton G E. Dynamic routing between capsules[J]. Neural Information Processing System, 2017, 3(1): 3856-3866.
[16] 朱娟, 陈晓. 改进胶囊网络的有序重叠手写数字识别方法[J]. 激光杂志, 2019, 40(7): 43-46.
Zhu Juan, Chen Xiao. An improved overlapping handwritten digit recognition method for capsule networks[J]. Laser Journal, 2019, 40(7): 43-46.
[17] Lin Lin, Wong Kaijuan, Arun K, et al. Evaluation of a TDMA-based energy efficient MAC protocol for multiple capsule networks[J]. EURASIP Journal on Wireless Communications and Networking, 2011, 2011(1): 121-128.
[18] Hao Chao, Liang Dong, Liu Yongli, et al. Emotion recognition from multiband EEG signals using CapsNet[J]. Sensors, 2019, 19(9): 22-31.
[19] 周本君. 基于卷积神经网络的人脸表情识别研究[D]. 南京: 南京邮电大学, 2019.
[20] 潘哲. 基于深度学习的航拍巡检图像绝缘子检测与故障识别研究[D]. 太原: 太原理工大学, 2019.
[21] 赵振兵, 徐磊, 戚银城, 等. 基于Hough检测和CV模型的航拍绝缘子自动协同分割方法[J]. 仪器仪表学报, 2016, 37(2): 395-403.
Zhao Zhenbing, Xu Lei, Qi Yincheng, et al. Automatic cooperative segmentation method of aerial insulators based on Hough detection and CV model[J]. Chinese Journal of Scientific Instrument, 2016, 37(2): 395- 403.
[22] 赵海勇, 刘志镜, 张浩. 基于改进CV模型的多运动目标分割[J]. 仪器仪表学报, 2010, 31(5): 1082- 1089.
Zhao Haiyong, Liu Zhijing, Zhang Hao. Multi- moving target segmentation based on improved CV model[J]. Chinese Journal of Scientific Instrument, 2010, 31(5): 1082-1089.
[23] 赖秋频, 杨军, 谭本东, 等. 基于YOLOv2网络的绝缘子自动识别与缺陷诊断模型[J]. 中国电力: 2019, 9(22): 1-10.
Lai Qiupin, Yang Jun, Tan Bendong, et al. Insulator automatic identification and defect diagnosis model based on YOLOv2 network[J]. Chinese Power, 2019, 9(22): 1-10.
Fault Identification and Location of Catenary Suspension Based on Improved Capsule Network
Abstract The contact area of the catenary suspension is small and easy to be confused with the power line. The traditional fault identification algorithms have problems such as misidentification of the suspension, low recognition efficiency and inability to detect in real time. Compared with the traditional convolutional neural network (CNN), the capsule network (CapsNet) uses vectors as input, which can well retain the feature information such as the direction and angle of the target, and is more suitable for identifying the suspension under complex background. Therefore, a suspension fault recognition algorithm based on improved capsule network and CV model is proposed. The convolution layer of traditional 9×9 capsule network is simplified by 1×1 reduction layer and 3×3 convolution layer, and the optimization algorithm is adopted to shorten the training weight time. At the same time, the output retains the direction and angle, which can more accurately classify the chords of burns, current-carrying ring breaks, and falling off, and so on. The method can be applied to the suspension inspection image. In this way, the accuracy of the catenary suspension positioning is increased to 95%. Finally, compared with Back Propagation Neural Network and AlexNet designed by Alex Krizhevsky, the proposed method of suspension fault identification can identify the suspension from the complex background and find the suspension accurately and quickly. The efficiency of the transmission line intelligent inspection can be greatly improved.
keywords:Suspension, fault identification, improved capsule network
DOI: 10.19595/j.cnki.1000-6753.tces.191448
中图分类号:TM922.5
卞建鹏 男,1982年生,博士,副教授,研究方向为电力系统绝缘子检测与识别、电气设备绝缘在线检测与故障诊断、电气设备全寿命周期管理等。E-mail: bjp210@126.com
郝嘉星 男,1992年生,硕士研究生,研究方向为电力系统绝缘子检测与识别、电气设备绝缘在线检测与故障诊断、图像处理等。E-mail: 873328461@qq.com(通信作者)
收稿日期 2019-11-09
改稿日期 2020-02-27
国家自然科学基金(51674169)和国家自然科学基金(51307112)资助项目。
(编辑 陈 诚)