图1 磁耦合装置结构与装配
Fig.1 Structure and assembly diagram of magnetic coupler
摘要 基于磁耦合谐振原理,设计一套基于弧形线圈和二次侧控制的无线充电系统,对水下自主航行器(AUV)无线充电技术有一定的借鉴意义。首先,提出一种可适应AUV特殊圆弧外形且接收端体积小、质量轻的磁耦合装置,利用有限元分析和实际测试对磁耦合装置进行性能分析,得知磁耦合装置具有良好的磁场自约束能力和耦合系数高达0.53的耦合能力;其次,对能量传输与控制系统进行设计和分析,设计系统运行可靠、二次侧独立控制的能量传输和控制拓扑,分析接收侧Buck变换器对充电电压和电流的调节作用,得到占空比与充电电压和电流的关系,并完成闭环环路设计;最后,搭建实验系统对方案进行验证。测试结果表明:该系统可实现对48V电池组(恒流阶段设定11A,恒压阶段设定54.1V)正常充电,系统最大充电功率600W,对应效率88.3%。
关键词:水下自主航行器 无线充电 磁耦合装置 二次侧控制
海洋中蕴藏着丰富的矿产与生物资源,人类正在尝试对海洋领域做进一步探索与开发。水下自主航行器(Autonomous Underwater Vehicle, AUV)作为探测海洋的重要装备,将在海洋资源开发、海洋生物研究等领域发挥重要作用[1-2]。但是,续航能力不足、巡航范围受限是限制AUV广泛应用的瓶颈之一[3]。传统接触式充电有短路风险,而且需要母船跟随保障[4]。无线充电技术通过非物理直接接触的方式对用电设备补充电能,可有效提高充电系统的安全性与便捷性[5]。正是这些优点,使无线充电技术应用于电动汽车、AGV、无人机等多个领域[6-8]。通过在海底基站及人工浮台上布置AUV水下无线充电系统,不仅能避免海水引起的安全隐患,还能实现充电过程全自动化,推进无人值守的海洋观测网建设进程。
关于AUV无线充电技术,目前研究还较少。2001年美国North Caroliana State大学研究团队研发出200W功率等级的AUV水下无线充电系统,初步验证水下无线充电技术的可行性[9]。日本Tohoku大学和NEC公司在2004年联合开发了应用于AUV无线充电的锥型磁耦合装置,并搭建了500W功率等级的实验系统[10]。近些年,美国San Diego State大学的Chunting Chris Mi教授团队在应用于AUV无线充电的磁耦合装置方面开展了大量研究,致力于开发出能有效抵抗AUV滚动错位且漏磁小的磁结构[11-12]。国内以浙江大学、西北工业大学和哈尔滨工业大学研究团队为代表,浙江大学的陈鹰教授团队对AUV水下无线充电技术开展了深入研究,利用罐型磁耦合装置搭建了AUV无线充电系统,并研究了海水压强对磁参数的性能影响规律[13-14]。此外,该团队还利用环型磁耦合装置搭建300W的AUV水下无线充电系统样机,并进行了实际水下充电测试。西北工业大学张克涵教授团队基于环型磁耦合装置设计了水下无线充电系统,该系统具有输出电压增益稳定的优点,并对海水中能量传输机理和涡流损耗情况进行了研究与分 析[15-16]。哈尔滨工业大学海洋自主航行器研究所针对AUV水下无线充电系统的磁设计和水下能量稳定控制方面开展了大量研究,已提出无需改变AUV外形的e 形磁耦合装置,并搭建测试系统[17]。
无线充电系统的能量传输与控制涉及到磁耦合装置、能量传输系统和能量控制系统三部分。磁耦合装置作为实现能量传递的关键部件,由发射和接收两部分构成[18-19];能量传输系统负责将电能稳定、可靠、高效地输送到用电设备内部,通常由电源系统、高频逆变器、谐振补偿电路、整流及滤波电路构成[20]。无线充电系统不可避免会出现错位情况,导致能量传输系统输出发生变化,而且电池充电过程中耐受的电压和电流能力不断变化,这就需要能量控制系统来实时对系统功率进行调节[21]。能量控制系统通常由能量调节主电路、采样及反馈系统和控制器三部分构成。
相比大气中无线充电系统,AUV无线充电系统面临AUV外形为圆弧形状、海水介质会引起涡流损耗、海水中不便于建立稳定无线通信、洋流及海洋生物对系统的对接姿态产生扰动四个主要问题。特殊外形造成磁耦合装置设计困难;海水涡流损耗会降低系统效率;对接姿态变化对能量传输与控制系统稳定性提出严格要求;在无通信模式下如何实现系统功率控制及如何保证系统安全,这都增加了水下无线充电技术的难度。针对以上问题,本文从磁耦合装置、能量传输拓扑及充电功率控制系统三部分开展研究,设计一套基于弧形线圈和二次侧控制的无线充电系统,期望对AUV无线充电技术发展提供一定的借鉴作用。本文还搭建了仿真及实验测试平台,验证该方案的可行性。测试结果验证了所提出方案可以高效率地完成对AUV正常充电功能。
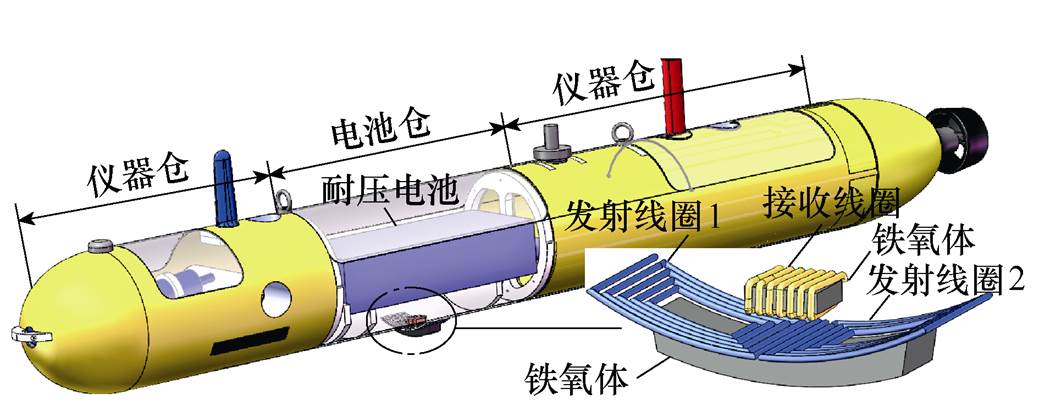
磁耦合装置是无线充电系统中实现能量非接触式传输的核心部件。以上分析中已得到:应用于AUV无线充电的典型磁耦合装置结构主要有锥形、罐形、e 形、环形和分段式环形五种类型。锥形和罐形磁耦合装置需要改变AUV圆弧外形,致使AUV航行时阻力增大;e 形磁耦合装置不需要改变AUV外形,但受AUV滚动错位的影响较大;环形磁耦合装置性能几乎不受滚动错位影响,但文献[11]研究中发现环形磁耦合装置漏磁较大,会对AUV内部器件产生干扰;分段式环形磁耦合装置降低了漏磁水平,并且同样具有优秀的滚动错位容忍能力。但是,环形类磁耦合装置需要在AUV内侧加装整圈铁氧体,过多地增加了AUV的负重。针对上述磁耦合装置存在的问题,本文设计了一种无需改变AUV外形、接收端使用少量磁心的磁耦合装置,磁耦合装置结构与装配如图1所示。复合材料(如玻璃纤维)具有高比强、抗腐蚀、耐磨损、密度小等特性,已成为替代传统金属材质的新型AUV外壳材料[11]。本文无线充电系统仅针对复合材料外壳的AUV。
图1 磁耦合装置结构与装配
Fig.1 Structure and assembly diagram of magnetic coupler
AUV内部设备密集,可用于装配无线充电装置的空间极为受限。图1所示的AUV内部仅在电池仓中尚存在闲置空间,而且耐压电池上方通常用于放置浮力材料,因此本文将无线充电接收装置装配在耐压电池下方区域。磁耦合装置的发射端采用弧形线圈结构,使用圆弧状的铁氧体磁心以保证发射装置尽可能地贴合AUV圆弧外壳,从而减小发射端与接收端气隙,增大耦合能力;同时减小气隙也能降低磁通在海水中的流通路径长度,从而降低涡流损耗。两个发射线圈电流走向相反,这使得磁通沿其中一个发射线圈流入AUV内部,经由AUV内部后,沿另外一个发射线圈流出。接收装置采用了在小型I型磁心上绕制线圈的方式,接收侧磁心用来引导发射端发出的磁通,使发射磁通穿过接收线圈,实现发射端和接收端的磁场耦合。
利用有限元分析工具Maxwell搭建磁耦合装置仿真模型,得到磁耦合装置轴向切面的磁力线分布如图2所示。可发现,绝大多数磁力线均穿过接收端磁心,发射端和接收端实现有效耦合。而且,强磁场分布在AUV外壳最底端区域,交变磁场被收敛在AUV腹部,磁耦合装置具有良好的磁场自约束能力。
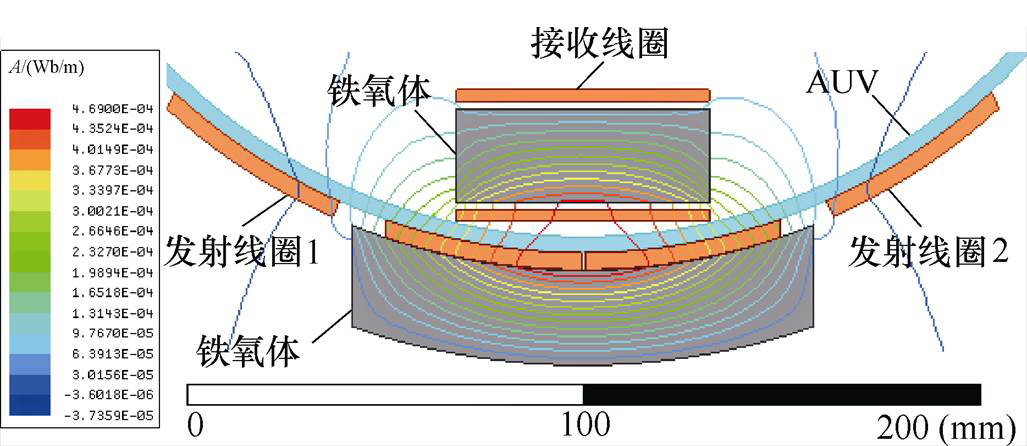
图2 磁耦合装置轴向切面的磁力线分布
Fig.2 Magnetic flux distribution on a cross section of the proposed magnetic coupler
为进一步测试磁耦合装置性能,搭建如图3所示的磁耦合装置实物。利用直径300mm透明有机玻璃管模拟AUV外壳,磁接收装置的长、宽、厚分别为6cm、7.2cm、3.6cm,接收装置质量为600g。发射端和接收端气隙为8mm,气隙由AUV外壳厚度和防水层厚度决定。基于磁场耦合的无线充电系统依赖发射端和接收端之间的互感M实现能量无线传递,参数M的稳定性是影响系统能量传输稳定性的关键因素。同时,滚动错位和轴向错位(两种错位情况已在图3中标识)是AUV无线充电系统常出现的两种错位情况,滚动-10°和轴向错位-30mm示意及互感M随滚动和轴向错位变化情况如图4所示。因此,借助阻抗分析仪测试磁耦合装置在两种错位情况下的M变化情况,测试结果如图4b和图4d所示。
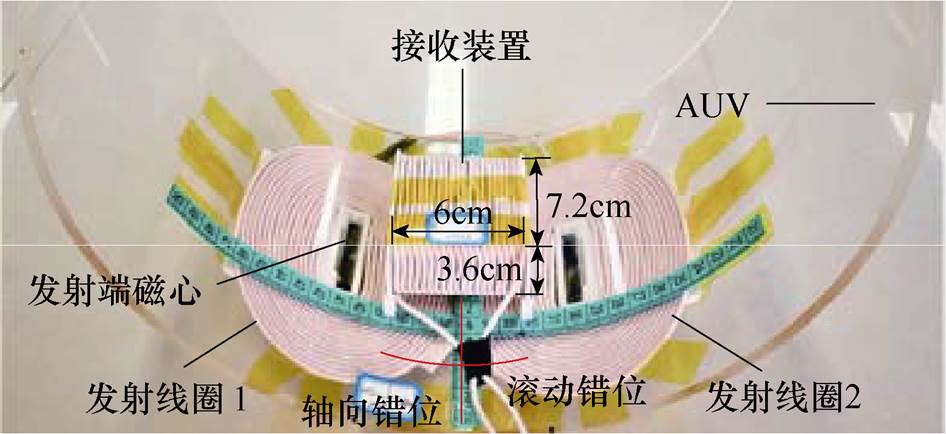
图3 磁耦合装置实物
Fig.3 Prototype of the proposed magnetic coupler
由图4的错位测试结果得到:在对准情况下,发射端自感LP、接收端自感LS、互感M分别为102.4mH、66.5mH、43.9mH,对应耦合系数k=0.53,所提出磁耦合装置具有较强的耦合能力。随着滚动错位程度增大,M逐渐减小。在滚动错位-10°时(见图4a),M跌落最大,此时M=33.3mH,最大跌落10.6mH,随着轴向错位程度增大,M逐渐减小;在轴向错位-30mm时(见图4c),M跌落最大,最大跌落10.3mH。
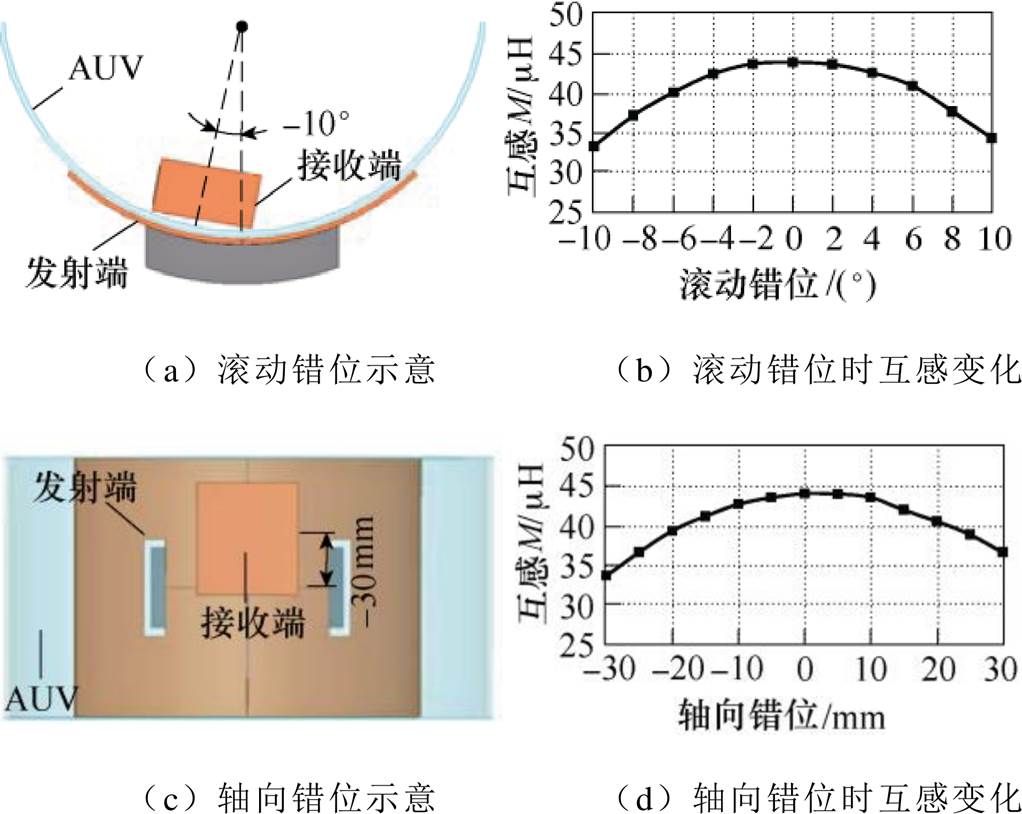
图4 滚动-10°和轴向错位-30mm示意及互感M随滚动和轴向错位变化情况
Fig.4 Schematic diagram of rolling -10° and axial misalignment of -30mm & mutual inductance M varies with rotational and axial misalignment
一次侧控制、二次侧控制和双边控制是无线充电系统常采用的三种能量控制方式。一次侧控制仅在发射端放置功率调节电路,通过无线通信方式实时反馈接收侧输出状态,由发射端实施调节任务;二次侧控制仅在接收端放置功率调节电路,接收端检测并调节输出情况;双边控制在发射端和接收端均添加调节电路,对提高系统可靠性和工作效率方面有不错的效果。海洋中不便于建立稳定无线通信,二次侧调节方式在海洋环境中具有更好的适用性;洋流及海洋生物对无线充电系统的影响不仅在于电能传递能力方面,当系统受到剧烈冲击时,系统的安全性也应是系统设计要考虑的重要方面;同时,系统的传输效率也是衡量系统性能的重要参数。综合考虑以上方面,本文设计的AUV水下无线充电系统的能量传输与控制的拓扑结构如图5所示,由能量发射系统、能量接收系统和能量控制系统三部分构成。图中,UDC、CDC是输入电源电压和稳压电容;S1~S5是MOSFET开关管;LP、LS和M分别是发射装置自感、接收装置自感和互感;RP、RS是发射装置和接收装置内阻;L1是补偿电感;CP、C1和CS是补偿电容;IIN、IP、IS分别是逆变桥输出电流、励磁电流和流过接收装置电流的基波有效值;VD1~VD5是二极管;Cdc是滤波电容;Udc和Idc是整流并滤波后的输出电压和电流;L2和CB是Buck变换器的电感和电容;UB和IB是充电电压和电流。
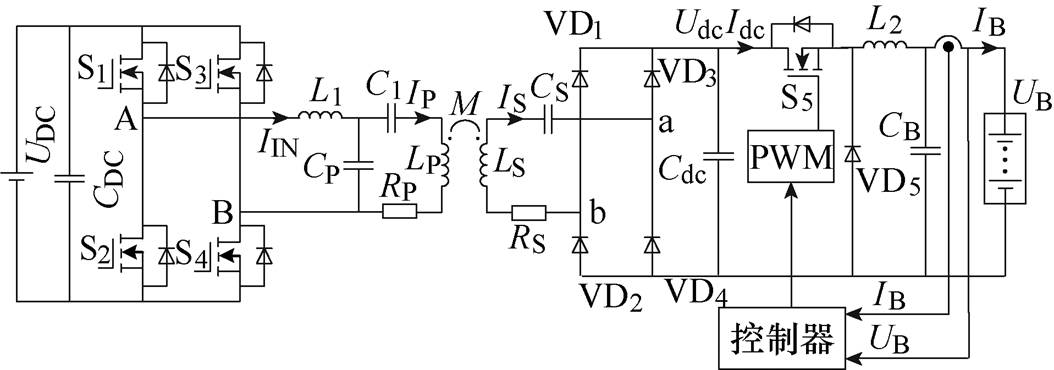
图5 能量传输与控制拓扑
Fig.5 Energy transfer and control topology
能量发射系统由电压型逆变桥、补偿电路和磁发射装置三部分构成。逆变电路为系统提供高频激励源,本文采用工作频率为50kHz的恒频工作方式。磁耦合装置的气隙大,造成发射端和接收端含有较大漏感,为了提高系统电能传递能力及传输效率,在发射端和接收端均添加补偿电路。串联、并联、LCL是三种常见的补偿方式[22-25]。电压型元件无法直接与电压型逆变桥并联,并且一次侧串联补偿方式不允许空载运行,因此本文在一次侧采用了可靠性更高的LCL补偿方式。逆变输出的激励源经由LCL补偿电路后,转变为恒流源供给磁发射装置,激励出交变磁场。
能量接收系统由磁接收装置、补偿电路和整流电路三部分构成。为了尽可能降低接收侧质量,本文仅考虑在接收侧采用串联和并联补偿方式。LCL-P补偿的输出具有恒流源特性,为提供短路通道,通常将Boost变换器作为LCL-P系统的功率调节拓扑[26]。AUV的电池电压远低于电动汽车系统,本文中AUV电池组标称电压为48V,要求恒流阶段充电电流为11A,相比电动汽车,是一种低电压、大电流系统。采用LCL-P补偿方式,增大了流过整流桥的电流幅值,也就增大了系统损耗,降低了整体效率。本文采用LCL-S的恒压源输出特性补偿结构,接收侧采用Buck变换器实现输出功率控制。该降压调节模式可有效地降低流过整流桥电流幅值,提升系统效率。
能量控制系统采用了二次侧独立控制方式,一次侧工作在近似“开环”状态,有效地降低了系统对无线通信的依赖程度。利用Buck变换器作为功率调节主电路,实时检测充电电压UB和电流IB,并将充电电压和电流反馈给控制器,经由PID控制器后调节PWM占空比,实现恒流与恒压充电功能。
将图5简化得到如图6所示的系统能量传输通道简化模型。模型中忽略了线圈内阻,因为在绕制线圈时使用了Litz线,线圈内阻极小;将逆变高频激励源用正弦交流激励电源UIN替代,由于谐振补偿电路具有带通滤波作用,可认为逆变器输出电压中仅有基波分量参与能量传递过程;Req是整流器、Buck变换器和电池负载的等效交流电阻;Uout是能量传输通道输出电压。
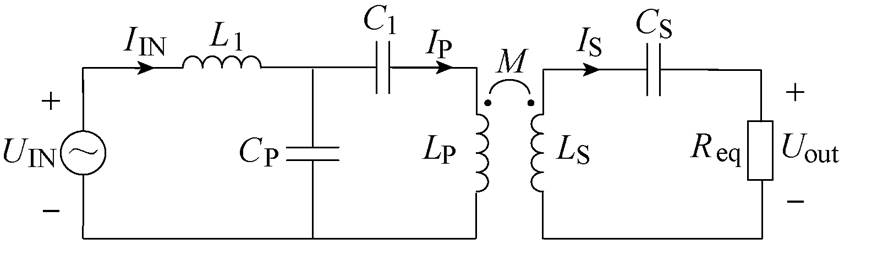
图6 能量传输通道简化模型
Fig.6 Simplified model of energy transmission channel
逆变器采用移相控制方式,其输出电压基波分量UIN[26]为
 (1)
(1)式中,f 为导通角。
根据图6得到能量传输通道输出电压Uout为
 (2)
(2)式中,w 为工作角频率。
发射端输入到磁耦合装置的励磁电流IP为
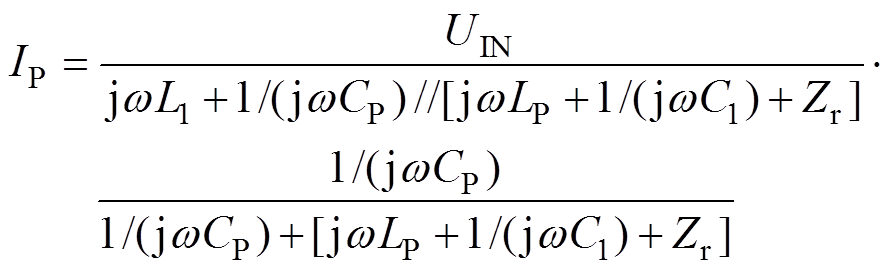 (3)
(3)式中,Zr为反映阻抗,代表接收端电路对发射端的影响,定义为
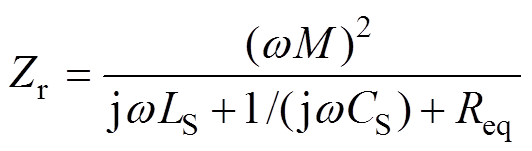 (4)
(4)
为提高系统电能传递能力和传递效率,设计系统补偿电路工作于谐振状态,补偿元件参数满足以下条件
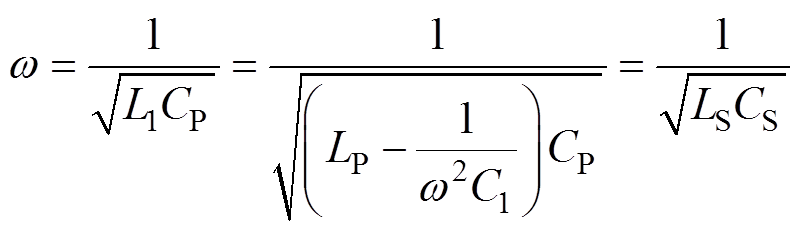 (5)
(5)将式(5)代入式(4)得到所设计系统反映阻抗呈纯阻性,可避免无功功率在流经海水介质时引起额外损耗。并且,在系统对接姿态变化时,不会因耦合系数变化而改变反映电抗,能量发射系统可保持工作于谐振状态。
根据式(3)~式(5),求解式(2)得到工作在谐振条件下的能量传输通道输出电压Uout为
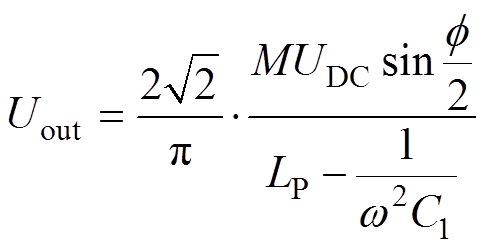 (6)
(6)本文采用电压型整流电路,结合式(6),得到整流电路输出电压Udc为
 (7)
(7)
本文中,逆变电路导通角f 恒定,由式(7)得到整流电路输出电压Udc恒定。
为了便于分析,假设Buck变换器是无损的。根据Buck变换器输入与输出关系,得到充电电压为
 (8)
(8)式中,D为Buck变换器占空比。
整合式(7)和式(8),得到系统充电电压UB和充电电流IB分别为
 (9)
(9)式中,RB为电池组充电时的等效负载电阻,定义为充电电压UB与充电电流IB的比值。
根据图6还可以获得能量传输通道的输入电流,即逆变电路输出电流为
 (10)
(10)根据式(10)得到,当系统受到扰动时,互感M会随错位发生变化,此时所设计系统的逆变输出电流IIN也会自动跟随M降低,提高系统安全性。
无线充电系统功率闭环控制的目的在于实现恒流与恒压输出。本文采用二次侧独立控制方式,由式(9)得到,通过调节Buck变换器占空比可实现输出充电电压和充电电流调节的目的。恒流与恒压充电阶段需要分别对电流和电压进行闭环控制,本系统采用电流环与电压环两个控制环路,两个环路分阶段工作,系统闭环控制框图如图7所示。通过调整Buck变换器的占空比D实现对输出充电电压和充电电流的控制。在充电起始阶段采用电流环路,实现11A恒定电流输出控制;当充电电流达到转折电压54.1V时,采用电压环路,实现54.1V恒定电压输出控制。
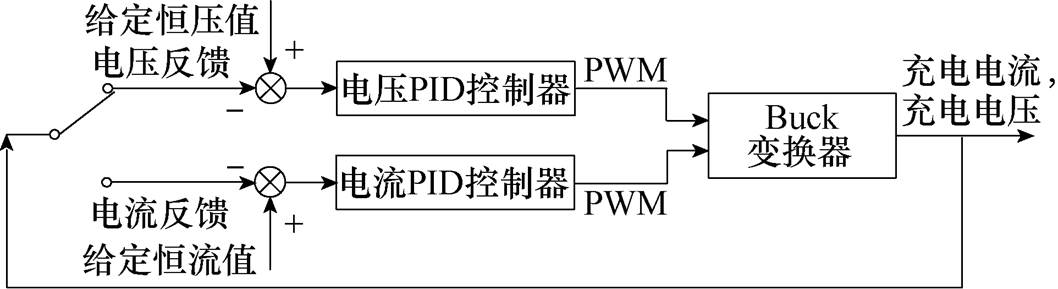
图7 系统闭环控制框图
Fig.7 System closed-loop control block diagram
搭建无线充电系统实验装置如图8所示,该装置由逆变器、补偿电路、磁耦合装置、整流电路、Buck变换器等部分构成,详细参数见表1。发射端和接收端控制器采用了TMS320F28335,开关管型号为C2M0080120D,二极管型号为DSS16-01A。发射端DSP用来产生四路恒定占空比的PWM信号驱动逆变桥;接收侧DSP负责对充电电压和电流采样,并实现闭环恒流与恒压充电控制。交变磁场在海水中会形成涡流损耗,但在50kHz工作频率及8mm小气隙应用场合的涡流损耗极小,此时可认为在海水环境中的系统性能和空气中基本一致[10-11]。为降低实验难度,本次实验在空气中进行。本次实验未使用实际锂电池,而是利用可编程电子负载模拟电池充电特性。恒流充电阶段充电电流IB=11A,充电电压UB可能变化范围是36~54.1V,对应等效负载电阻RB变化范围是3.3~4.9W;恒压阶段UB为54.1V,IB由11A自动降至1A以下时截止,对应RB变化范围是4.9~54.1W。
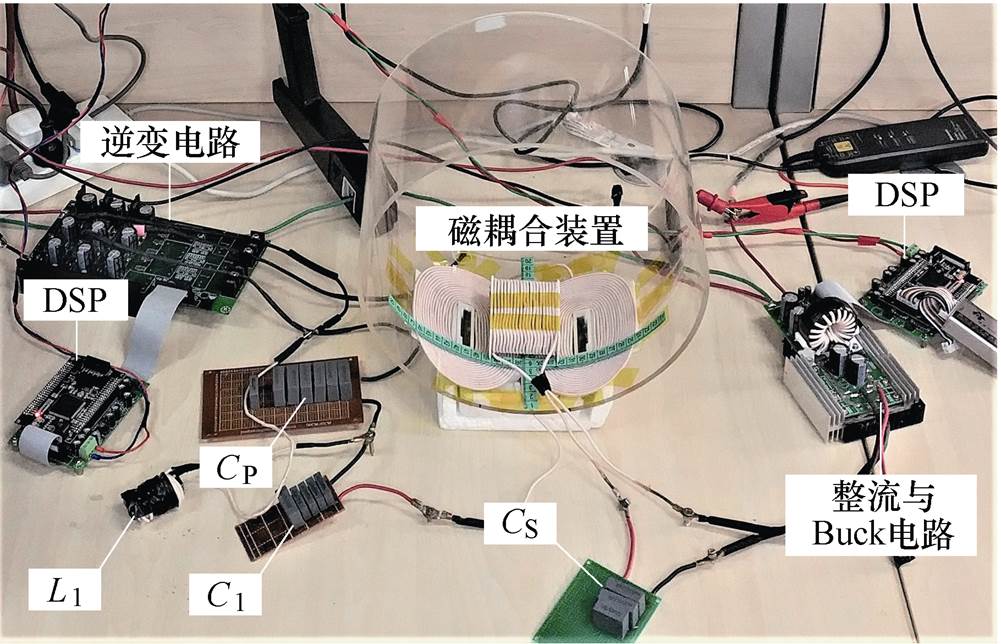
图8 无线充电系统实验装置
Fig.8 Experiment setup of wireless charging system
表1 实验平台参数
Tab.1 The parameters of experiment setup
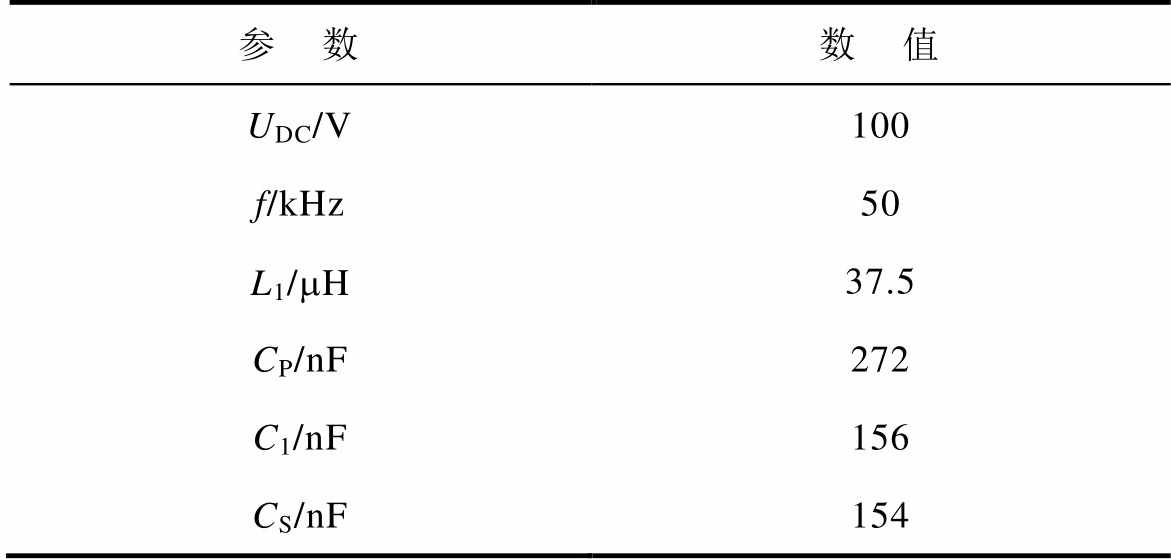
参 数数 值 UDC/V100 f/kHz50 L1/mH37.5 CP/nF272 C1/nF156 CS/nF154
系统实验波形如图9所示,分别测试了逆变桥输出电压UAB和电流IIN、整流桥输入电压Uab和电流IS。由测试结果得知,系统中各模块电路可正常工作,而且电能可传递到接收侧。
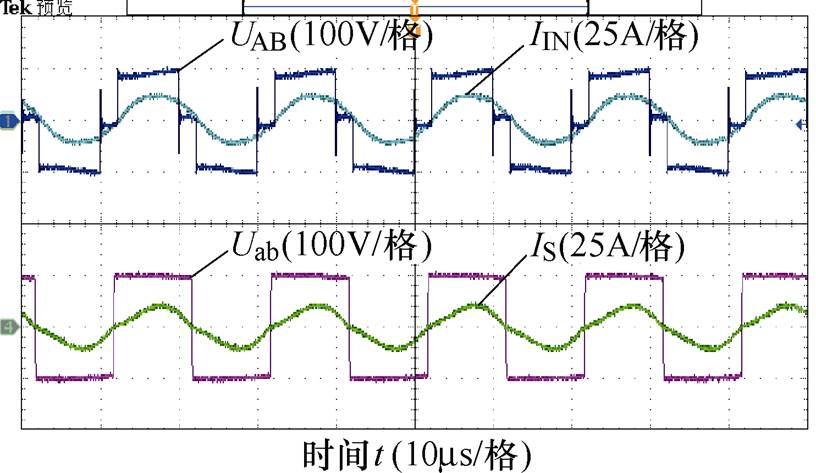
图9 系统实验波形
Fig.9 Waveforms of the experimental system
改变负载电阻RB,测试无线充电系统输出充电电压UB和充电电流IB变化情况,系统充电过程的充电电压和充电电流测试如图10所示。可发现,恒压阶段输出充电电压UB可以稳定在54.1V,恒流阶段输出充电电流IB稳定在11A,而且可实现恒流到恒压阶段的正确切换,系统可完成正常无线充电功能。
利用横河功率分析仪测试充电过程中的系统输出充电功率PB与效率,绘制充电功率、整机效率随负载电阻RB变化情况如图11a所示。其中,整机效率指发射端直流输入侧到接收端电池侧之间效率。可发现,充电全程无线充电系统整机效率均高于80%。随着负载电阻增大,充电功率PB先增长再逐渐减小。绘制PB在350W以上充电阶段,如图11b所示,在该阶段的充电功率较大,是决定散热系统复杂程度的主要阶段,而且该阶段也消耗充电过程的绝大多数时间,因此该阶段性能更为重要。从测试结果可得知,充电过程中的350W及以上功率段对应整机效率均能高于88%,系统可以高效率工作。

图10 系统充电过程的充电电压和充电电流测试
Fig.10 Output voltage and current test of the system charging process
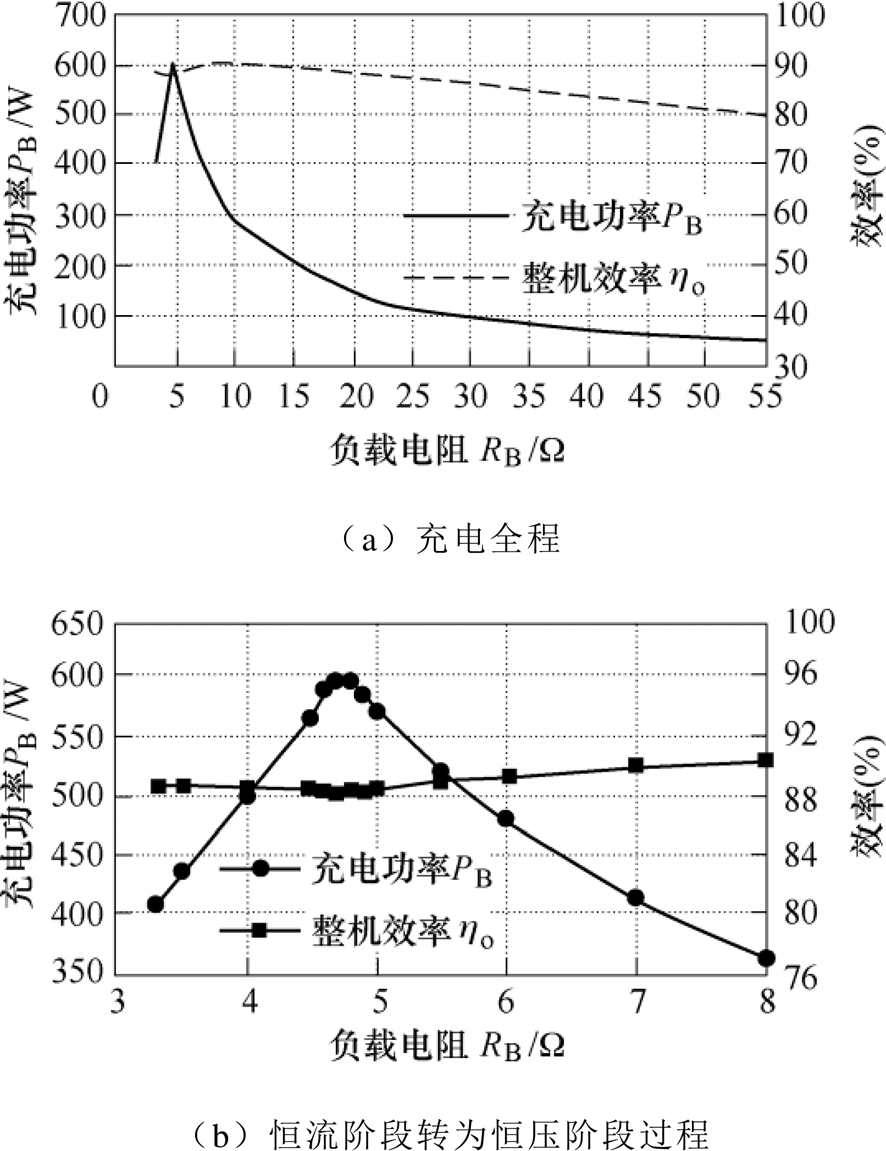
图11 系统充电过程的输出充电功率和效率测试
Fig.11 Power and efficiency test of the system charging process
充电过程中恒流阶段转恒压阶段的转折点为最大功率点,对应负载电阻为4.9W,最大功率点和最大效率点工作情况如图12所示。利用功率分析仪测得此时系统输入和输出情况如图12a所示。其中,通道一对应发射端直流输入侧,通道四对应接收端Buck变换器输出侧。可得知,此时充电电压UB和充电电流IB分别为54.13V、11.118A,充电功率PB为599.3W,对应整机效率为88.3%。图12b中所示的是在负载电阻为10W 时系统输入与输出的情况,此时系统整机效率最大,最大充电效率为90.6%。系统工作于最大功率点时的损耗分布情况如图12c所示。系统共损耗79.1W,其中磁耦合装置及补偿电路损耗占比较小,仅占系统总损耗的22.1%,所设计磁耦合装置可高效率传递能量。
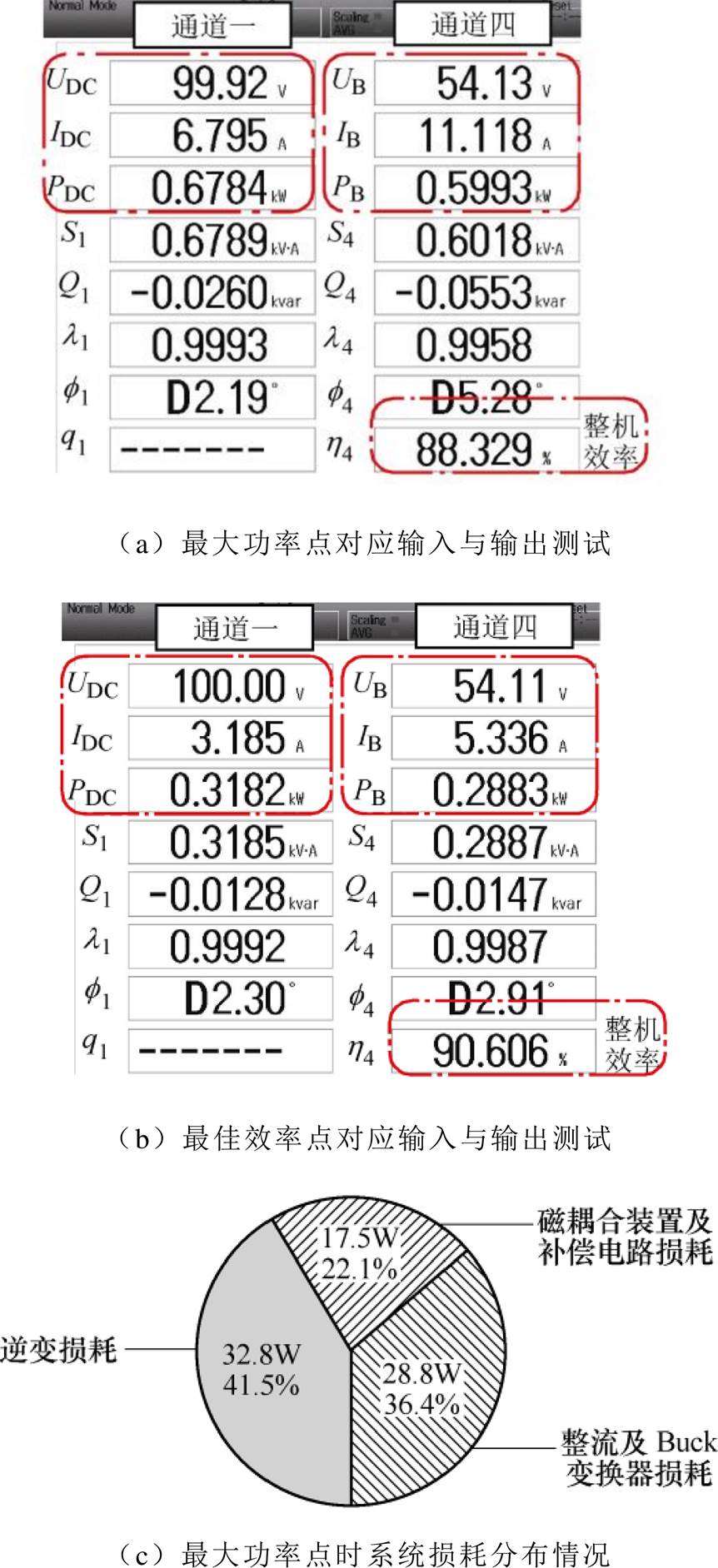
图12 最大功率点和最大效率点工作情况
Fig.12 Maximum power point and maximum efficiency point operating conditions
为了测试错位过程中无线充电系统恒流及恒压调节控制能力,分别以负载电阻RB=4W(对应恒流充电阶段)和10W(对应恒压充电阶段)测试滚动、轴向两种错位情况下的充电电流IB、充电电压UB变化情况,充电电压和充电电流随滚动和轴向错位变化情况如图13所示。选择RB=4W 和10W 作为测试点的原因有:首先,整十数值或整数值负载阻值更便于设定;其次,10W 阻值点处于恒压充电阶段前期,此时充电功率较大,更能揭示恒压阶段性能。由测试结果可发现,滚动和轴向错位过程中,负载电阻为4W 对应的充电电流均能保持在11A,负载电阻为10W 对应的充电电压均能保持在54.1V,滚动和轴向错位过程中无线充电系统可实现正常恒流与恒压充电功能。

图13 充电电压和充电电流随滚动和轴向错位变化情况
Fig.13 Charging voltage and charging current varies with rotational and axial misalignment
本文从磁耦合装置、能量传输拓扑及充电功率控制系统三方面入手,开展了无线充电系统的能量传输与控制技术研究,为水下自主航行器无线充电形成一定的技术积累。提出一种具有弧形线圈结构的磁耦合装置,该装置具有可适应水下自主航行器特殊圆弧外形、接收端质量轻、磁场自约束效果好的优势。设计了能量传输与控制拓扑,并设计了相应的闭环控制系统,通过电路建模分析获得输出充电电流和充电电压的影响因素。采用二次侧控制方式,调节Buck电路占空比实现系统恒流与恒压充电控制。通过搭建实验平台验证了该方案的可行性。
参考文献
[1] Carreras M, Hernández J D, Vidal E, et al. Sparus II AUV-a hovering vehicle for seabed inspection[J]. IEEE Journal of Oceanic Engineering, 2018, 43(2): 344-355.
[2] Eriksen C C, Osse T J, Light R D, et al. Seaglider: a long-range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 424-436.
[3] Page B R, Mahmoudian N. Simulation-driven optimi- zation of underwater docking station design[J]. IEEE Journal of Oceanic Engineering, 2020, 45(2): 404- 413.
[4] 吴旭升, 孙盼, 杨深钦, 等. 水下无线电能传输技术及应用研究综述[J]. 电工技术学报, 2019, 34(8): 5-14.
Wu Xusheng, Sun Pan, Yang Shenqin, et al. Review on underwater wireless power transfer technology and its application[J]. Transactions of China Electro- technical Society, 2019, 34(8): 5-14.
[5] 赵争鸣, 张艺明, 陈凯楠. 磁耦合谐振式无线电能传输技术新进展[J]. 中国电机工程学报, 2013, 33(3): 2-13.
Zhao Zhengming, Zhang Yiming, Chen Kainan. New progress of magnetically-coupled resonant wireless power transfer technology[J]. Proceedings of the CSEE, 2013, 33(3): 2-13.
[6] 张献, 章鹏程, 杨庆新, 等. 基于有限元方法的电动汽车无线充电耦合机构的磁屏蔽设计与分析[J]. 电工技术学报, 2016, 31(1): 71-79.
Zhang Xian, Zhang Pengcheng, Yang Qingxin, et al. Magnetic shielding design and analysis for wireless charging coupler of electric vehicles based on finite element method[J]. Transactions of China Electro- technical Society, 2016, 31(1): 71-79.
[7] 张剑韬, 朱春波, 陈清泉. 应用于AGV的非接触式无线充电技术研究[J]. 电工技术学报, 2013, 28(增刊1): 100-104.
Zhang Jiantao, Zhu Chunbo, Chen Qingquan. Study on contactless wireless charging technology applied to AGV[J]. Transactions of China Electrotechnical Society, 2013, 28(S1): 100-104.
[8] 马秀娟, 武帅, 蔡春伟, 等. 应用于无人机的无线充电技术研究[J]. 电机与控制学报, 2019, 23(8): 1-9.
Ma Xiujuan, Wu Shuai, Cai Chunwei, et al. Research on wireless charging technology applied to UAVs[J]. Electric Machines and Control, 2019, 23(8): 1-9.
[9] Feezor M D, Sorrell F Y, Blankinship P R. An interface system for autonomous undersea vehicles[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 522-525.
[10] Kojiya T, Sato F, Matsuki H, et al. Automatic power supply system to underwater vehicles utilizing non-contacting technology[C]//Oceans '04 MTS/IEEE Techno-Ocean, Kobe, Japan, 2004: 2341-2345.
[11] Kan Tianze, Mai Ruikun, Mercier P P, et al. Design and analysis of a three-phase wireless charging system for lightweight autonomous underwater vehicles[J]. IEEE Transactions on Power Electronics, 2018, 33(8): 6622-6632.
[12] Kan Tianze, Zhang Yiming, Yan Zhengchao, et al. A rotation-resilient wireless charging system for lightweight autonomous underwater vehicles[J]. IEEE Transactions on Vehicular Technology, 2018, 67(8): 6935-6942.
[13] Jie Zesong, Li Dejun, Lin Lin, et al. Design con- siderations for electromagnetic couplers in contact- less power transmission systems for deep-sea applications[J]. Journal of Zhejiang University Science C: Computer & Electronics, 2010, 11(20): 824-834.
[14] Zhou Jie, Li Dejun, Chen Ying. Frequency selection of an inductive contactless power transmission system for ocean observing[J]. Ocean Engineering, 2013, 60(3): 175-185.
[15] Lin Mingwei, Li Dejun, Yang Canjun. Design of an ICPT system for battery charging applied to underwater docking systems[J]. Ocean Engineering, 2017, 145: 373-381.
[16] 王司令, 宋保维, 段桂林, 等. 水下航行器非接触式电能传输技术研究[J]. 电机与控制学报, 2014, 18(6): 36-41.
Wang Siling, Song Baowei, Duan Guilin, et al. Study on non-contact power transmission of underwater[J]. Electric Machines and Control, 2014, 18(6): 36- 41.
[17] Cai Chunwei, Yang Zi, Qin Mu, et al. High transmission capacity P.U.A. wireless power transfer for AUV using an optimized magnetic coupler[C]// 2018 IEEE International Magnetics Conference, Singapore, Singapore, 2018: 1-1.
[18] 安慧林, 刘国强, 李艳红, 等. 三维抗偏转磁耦合谐振式无线电能传输谐振器特性研究[J]. 电工技术学报, 2019, 34(13): 2679-2685.
An Huilin, Liu Guoqiang, Li Yanhong, et al. The characteristics study of three dimension anti deflection magnetic coupling resonance wireless energy trans- mission resonator[J]. Transactions of China Electro- technical Society, 2019, 34(13): 2679- 2685.
[19] 陈宏亮, 林苏斌. 全方向无线充电负载位置前端监测[J]. 电气技术, 2019, 20(8): 28-32.
Chen Hongliang, Lin Subin. Front-end monitoring of all-direction wireless charging load position[J]. Electrical Engineering, 2019, 20(8): 28-32.
[20] 国玉刚, 崔纳新. LCC-S型无线电能传输系统优化配置及特性研究[J]. 电工技术学报, 2019, 34(18): 2723-3731.
Guo Yugang, Cui Naxin. Research on optimal con- figuration and characteristics based on LCC-S type wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2019, 34(18): 2723- 3731.
[21] 刘方, 陈凯楠, 蒋烨, 等. 双向无线电能传输系统效率优化控制策略研究[J]. 电工技术学报, 2019, 34(5): 5-15.
Liu Fang, Chen Kainan, Jiang Ye, et al. Research on the overall efficiency optimization of the bidir- ectional wireless power transfer system[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(5): 5-15.
[22] 宋凯, 李振杰, 杜志江, 等. 变负载无线充电系统的恒流充电技术[J]. 电工技术学报, 2017, 32(13): 130-136.
Song Kai, Li Zhenjie, Du Zhijiang, et al. Constant current charging technology for variable load wireless charging system[J]. Transactions of China Electrotechnical Society, 2017, 32(13): 130-136.
[23] 刘闯, 郭赢, 葛树坤, 等. 基于双LCL谐振补偿的电动汽车无线充电系统特性分析与实验验证[J]. 电工技术学报, 2015, 30(15): 127-135.
Liu Chuang, Guo Ying, Ge Shukun, et al. Characteri- stics analysis and experimental verification of the double LCL resonant compensation network for electrical vehicles wireless power transfer[J]. Transactions of China Electrotechnical Society, 2015, 30(15): 127-135.
[24] Li Siqi, Mi C C. Wireless power transfer for electric vehicle applications[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(1): 4-17.
[25] 张望, 伍小杰, 夏晨阳, 等. 补偿参数对串/串补偿型无线电能传输系统特性的影响分析[J]. 电力系统自动化, 2019, 43(7): 247-258.
Zhang Wang, Wu Xiaojie, Xia Chenyang, et al. Effect of compensation parameter on characteristics of series/series compensated wireless power system[J]. Automation of Electric Power Systems, 2019, 43(7): 247-258.
[26] Diekhans T, Doncker R W D. A dual-side controlled inductive power transfer system optimized for large coupling factor variations and partial load[J]. IEEE Transactions on Power Electronics, 2015, 30(11): 6320-6328.
Power Transfer and Control of Wireless Charging System Based on an Arc Coil Structure
Abstract This paper develops a wireless charging system using an arc coil and secondary side control method based on magnetically coupled resonance technology, which has certain reference to the wireless charging technology of underwater autonomous vehicle (AUV). Firstly, a magnetic coupler featuring a small-volume and lightweight receiver is proposed that can be adapted to the special arc shape of AUVs. The performance of the magnetic coupler is analyzed by finite element analysis and experiments. It is found that the magnetic coupler has good self-concentrating ability of magnetic field, and the coupling coefficient is high to 0.53. Secondly, the power transfer and control topology with reliable operation and secondary side control is designed, the regulating effect of the Buck converter on the charging voltage and current by the duty cycle is analyzed, and the closed-loop design is completed. Finally, an experimental system is built to verify the proposal. The results show that the 48V battery (11A constant current/54.1V constant voltage) can be charged normally. The maximum charging power of the system is 600W with an efficiency of 88.3%.
keywords:Autonomous underwater vehicle (AUV), wireless charging, magnetic coupler, secondary side control
DOI: 10.19595/j.cnki.1000-6753.tces.191834
中图分类号:TM724
蔡春伟 男,1977年生,博士,副教授,研究方向为无线电能传输技术和电力电子功率变换技术。E-mail: caichunwei@hit.edu.cn
杨世彦 男,1962年生,教授,博士生导师,研究方向为电能存储系统高效变换与均衡技术。E-mail: syyang@hit.edu.cn(通信作者)
收稿日期 2019-12-30
改稿日期2020-02-16
山东省自然科学基金(ZR2019MEE052)和山东省重大科技创新工程(2017CXGC0921)资助项目。
(编辑 陈 诚)